

Simulation and Post-Processing for Advanced Driver Assistance System (ADAS)

Abstract
:1. Introduction
- Active Safety Systems help prevent accidents altogether or at least reduce the degree of damage in an emergency situation. Among these systems, the systems that avoid wheel locking (anti-blocking systems, ABS), electronic stability control (ESC), and Autonomous Emergency Braking (AEB) systems are highlighted that autonomously intervene in stopping the vehicle when the driver alert does not intervene quickly enough, and finally, the systems that allow lane maintenance (Lane Support System, LSS).
- Passive safety systems, on the other hand, protect the vehicle’s occupants and other motorists if an accident occurs. This is performed by reducing the severity of the impact or injury to the person. There is currently a set of protection systems installed in the car, such as pre-tensioned seat belts, airbags, and energy-absorbing deformation zones, better known as crumple zones.
- Vehicle instrumentation, which involves the installation phase of the instruments and sensors necessary to acquire the data;
- Test on the track, execution of the maneuvers on the track with attached data acquisition;
- Post-processing of tests, using software and routines suitable for this purpose;
- Creation of a report, which allows you to summarize the results obtained from the previous steps, indicating the type of instrumentation, test type, and post-processing results.
- -
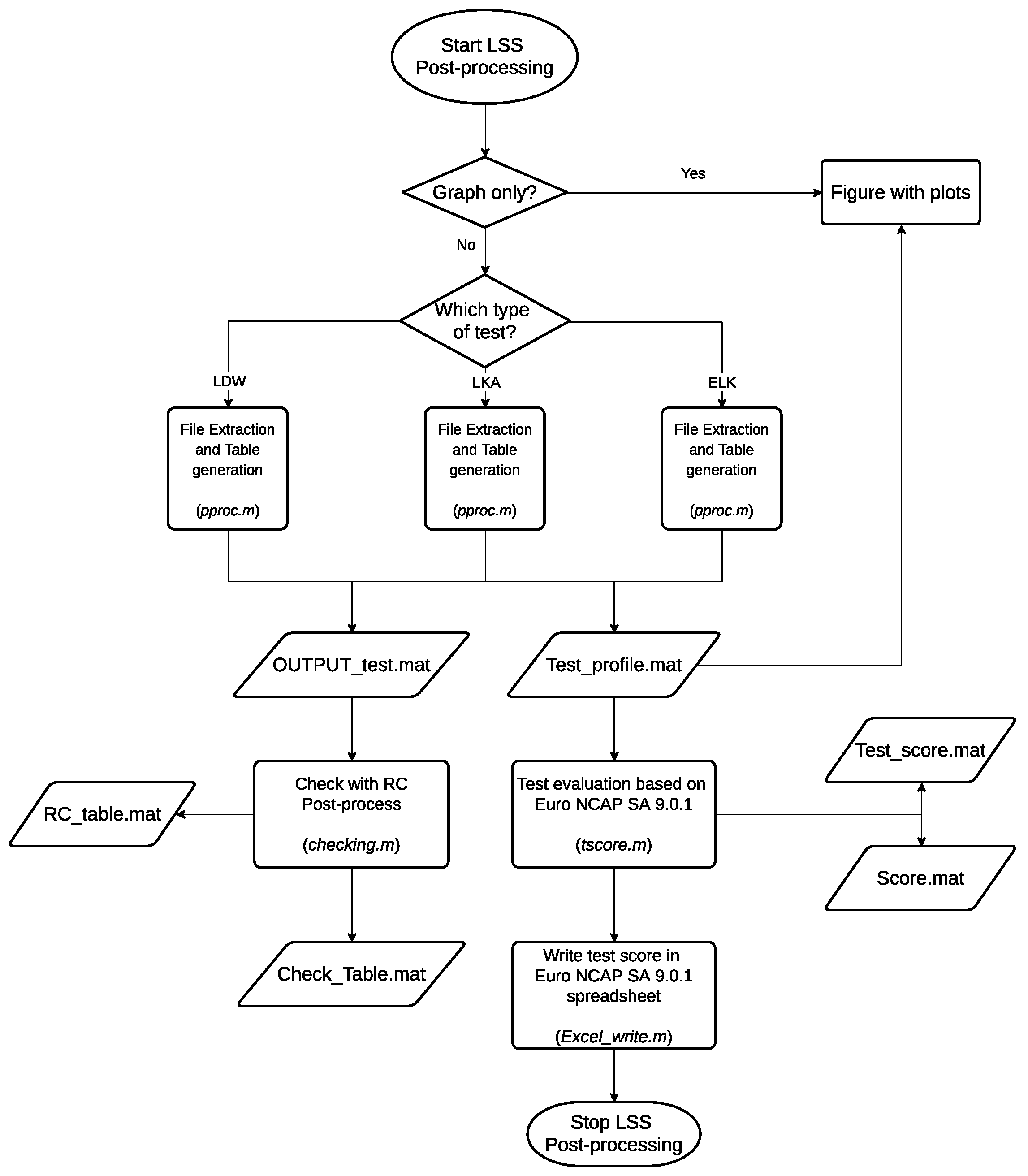
- A post-processing automatic routine for tests performed on LSS, according to Euro NCAP LSS 3.0.2 [8]; on AEB, according to Euro NCAP AEB C2C 3.0.2 [9]; and on Car to Pedestrian Nearside Child (CPNC), according to UNECE R152 CPNC [10]. In particular, the entire routine was schematized by a flowchart that contains all the functions developed to achieve the purpose. At the end of the process, tables were obtained that allow the graphical display of the results by using a scientific software [11] and the export of the score assigned to the single test, according to Euro NCAP SA 9.0.1 [12], on a spreadsheet prepared in the purpose of serving as a report; it contains all the information obtained from post-processing;
- -
- An analysis of the main aspects of Euro NCAP LSS 3.0.2 [8], Euro NCAP AEB C2C 3.0.2 [9], and UNECE R152 CPNC [10] regulations, highlighting, in particular, the maneuvers carried out on the track and the requirements that must be respected for the validation of the tests. The realized tool also includes the possibility of using other American and Chinese test regulations standards, such as GB/T 39901-2021 [13] (Car-to-Car static, moving, and braking tests) or National Highway Traffic Safety Administration (NHTSA) [14] (Car-to-Car moving and braking tests);
- -
- The development of a data-analysis tool to guarantee the correct generation and analysis of maneuvers for the ADAS and check the correctness of the environmental conditions, as requested by the normative. In particular, through a diagram of the car in a finite number of points, it was possible to verify the correct execution of the maneuver. Moreover, it identifies useful information for this purpose, such as the distances between the vehicles involved or between vehicles and pedestrians and the vehicle’s capacity or not using the sensors under test to detect vehicles in their surroundings.
2. Materials and Methods
- -
- Forward and lateral velocities;
- -
- Forward and lateral accelerations;
- -
- Yaw angle and yaw velocity;
- -
- Steering wheel angle and steering wheel velocity;
- -
- Relative longitudinal and lateral distances between VUT and target object;
- -
- Time-to-collision longitudinal between the VUT and target object;
- -
- Forward-collision warning signals (acoustic and visual).
2.1. LSSs
- Lane-Departure Warning (LDW), a warning of lane departure;
- Lane-Keeping Assist (LKA), lane-keeping assistance;
- Emergency Lane Keeping (ELK), maintenance of the emergency lane.
2.1.1. Measurements for LSS Testing (NCAP Regulation)
- -
- T0, the time in which the maneuver begins with 2 s of the straight path;
- -
- TLDW, the time in which the LDW system is activated;
- -
- TLKA, the time in which the LKA system is activated;
- -
- TSTEER, the time in which the VUT enters the curvilinear section;
- -
- TSSC, the time in which the VUT settles its lateral velocity.
- Ambient temperature, between 5 and 40 °C;
- Asphalt temperature, not expressly specified but such as not to affect the performance of the tires;
- Precipitation, absent and horizontal visibility greater than 1 km;
- Wind speed below 10 km/h to avoid disturbances to the car;
- Wind direction, not expressly specified but such as not to influence the dynamics of the vehicle;
- Natural, homogeneous lighting greater than 2000 lux for tests carried out during the day, in the absence of excessive shadows in the test area.
2.1.2. Test Execution for LSS Testing (NCAP Regulation)
- The LKA/ELK system fails to maintain the VUT within the permitted lane departure distance;
- The LKA/ELK system intervenes to keep the VUT within the permitted lane departure distance to obtain a maximum value in the lateral position curve, which subsequently decreases until the VUT is brought back toward the center of the lane.
2.2. Autonomous Emergency Braking (AEB) System
- Forward-Collision Warning (FCW) intervention, the instant in time in which the FCW system is activated because it has detected an obstacle and alerts the driver of the imminent danger without taking any action;
- Partial Braking, the time range in which the AEB system performs a partial action to slow down the vehicle without stopping it. Often this action can be performed in various stages, divided by braking-force intensity;
- Full Braking, the instant in which the AEB system completely influences the car’s motion, imparting a high braking force (within the limit of wheel locking) to bring the vehicle to a complete stop.
2.2.1. Measurements for AEB Testing (NCAP Regulation)
- Lateral path error, as already seen for NCAP regulation, is determined as the lateral distance between the center desired path and the one measured.
- Lateral overlap is the percentage of the VUT width that overlaps the GVT, measured by taking the vehicle center line as a reference. In case of 100% overlap, the two-vehicle center lines are aligned.
2.2.2. Test Execution for AEB Testing (NCAP Regulation)
- The speed of the VUT is zero: VVUT = 0 km/h;
- The speed of the VUT is lower than that of the GVT: VVUT < VGVT;
- Contact occurs between the two vehicles: XVUT − XGVT = 0 m.
2.3. UNECE R-152 Car to Pedestrian Nearside Child (CPNC) [12]
2.3.1. Measurements for CPNC Testing (UNECE R-152 Regulation)
- -
- Collision happens between the VUT and the SPT;
- -
- The VUT velocity drops to 0 km/h;
- -
- The SPT crosses out of the VUT width (this is the condition of no collision).
- -
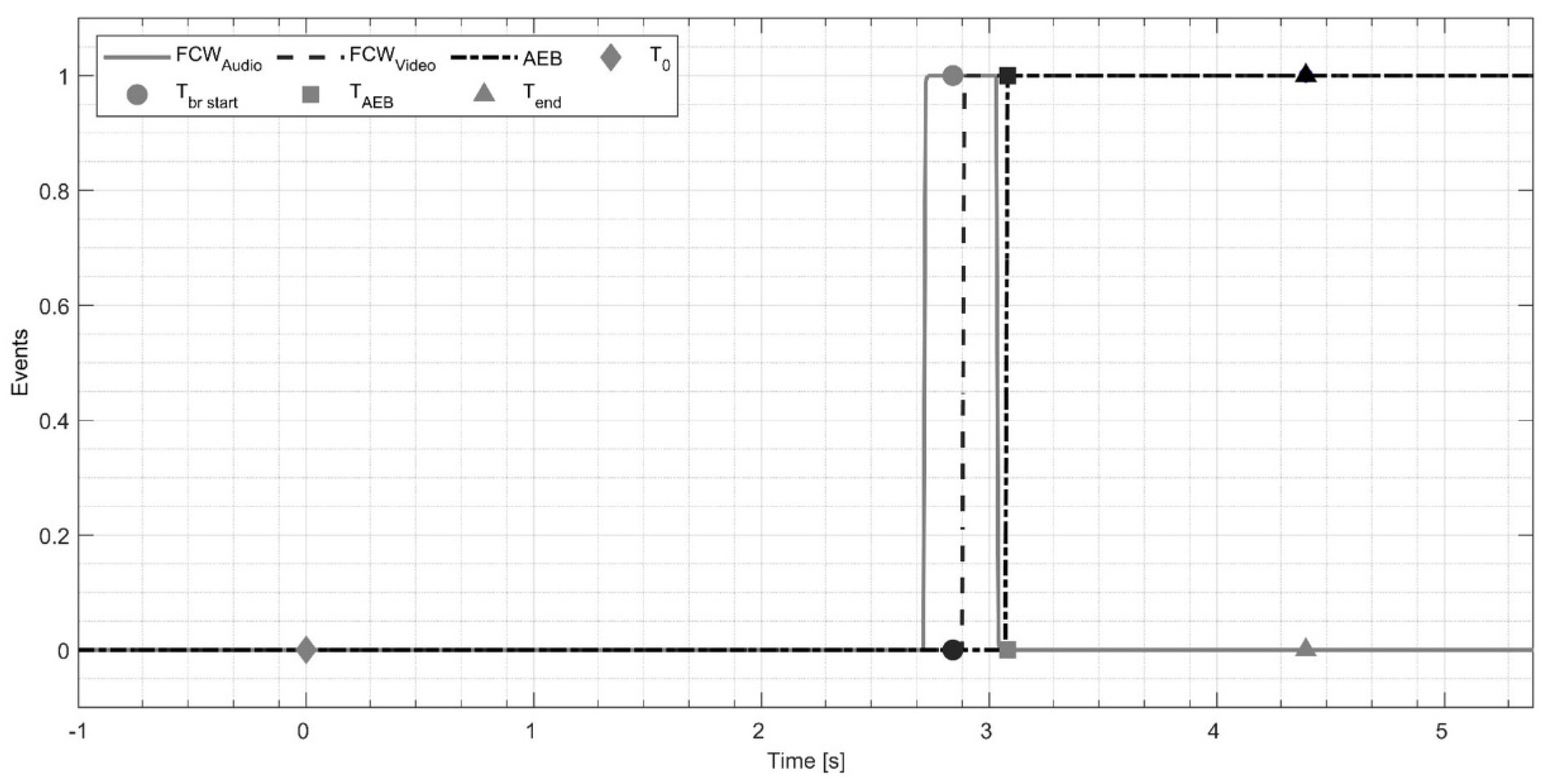
- TFCW, time sample corresponding to the FCW trigger’s activation on the vehicle’s instrument cluster. In particular, the FCW alert may be acquired in two different ways (audio and video): it is defined as expressed in (1), considering the minimum of these values.
- -
- TSV, start braking, time sample corresponding to the condition in which the VUT deceleration assumes a value less than or equal to 0.3 m/s2.
- -
- TSPT, start moving, time sample corresponding to the first value of SPT speed more than 0 km/h.
- -
- TAEB, time sample, corresponding to the condition in which the vehicle’s deceleration assumes a value less than or equal to 0.5 m/s2 for the last time before it assumes a value more than or equal to 5 m/s2. It is considered the time sample of the AEB activation:
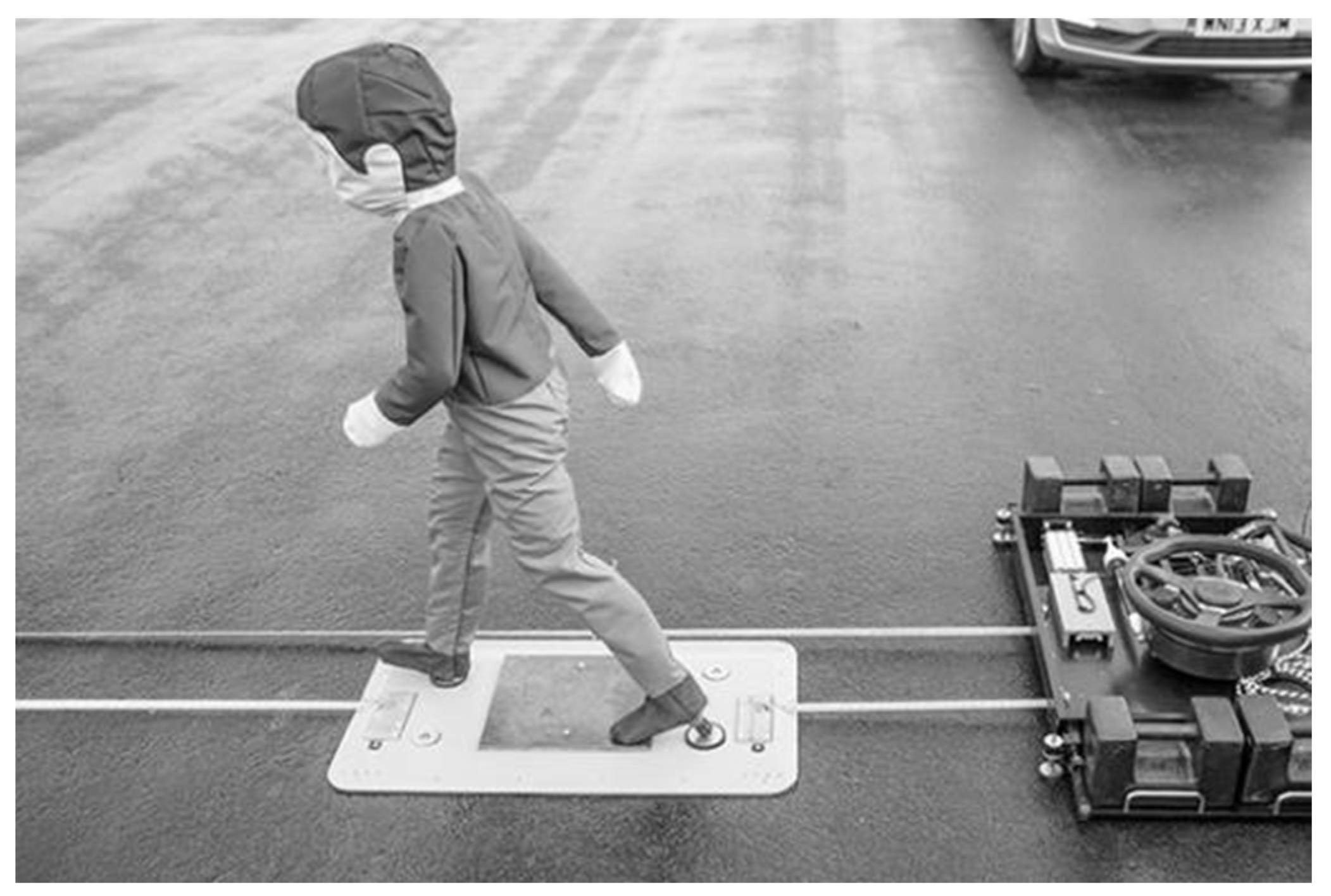
2.3.2. Test Execution for CPNC Testing (UNECE R-152 Regulation)
- -
- battery pack: a power supply unit for driving the robot and for the power supply.
- -
- Automotive Dynamic Motion Analyzer (ADMA) and highly precise Inertial Measurement Unit (IMU). It is hard-wired with the following:
- GNSS Antenna Novatel;
- Real-time kinematic positioning (RTK) Radio Modem to improve the GPS positioning accuracy;
- Driving-Robot motion-controller unit.
- -
- Onboard control PC unit and Robot Controller (RC) software.
- -
- Robot Controller unit (including motion controller). It is directly connected with the following:
- Steering Robot (SR);
- Combined Braking and Accelerator Robot (CBAR).
2.4. Test Data Post-Processing Tool
- -
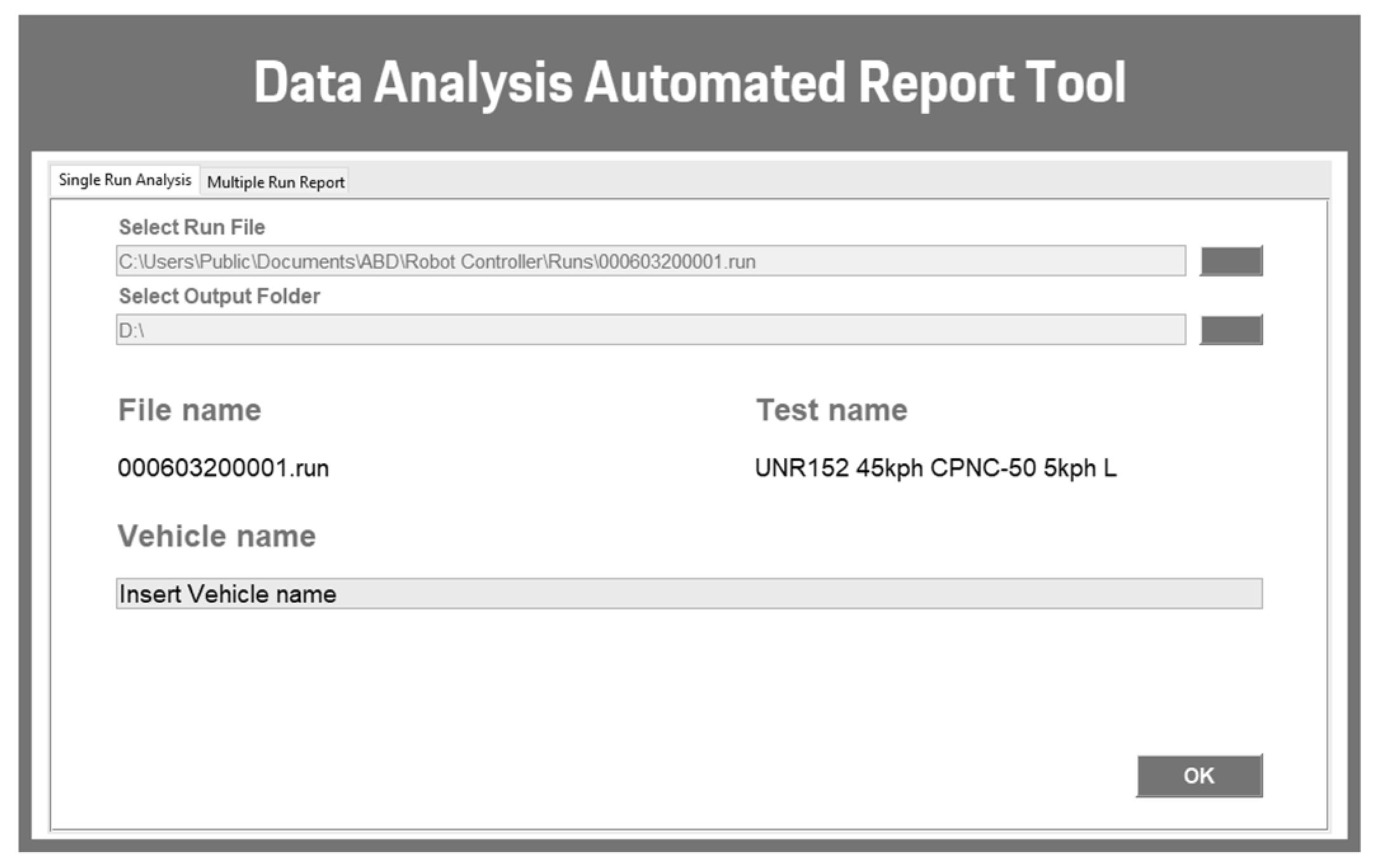
- Data analysis, the analysis of a single test-run datum and the validation of it according to the regulation targets;
- -
- Automated report, the result of the tool as a single run PDF summary plots file and test session key run data Excel summary file.
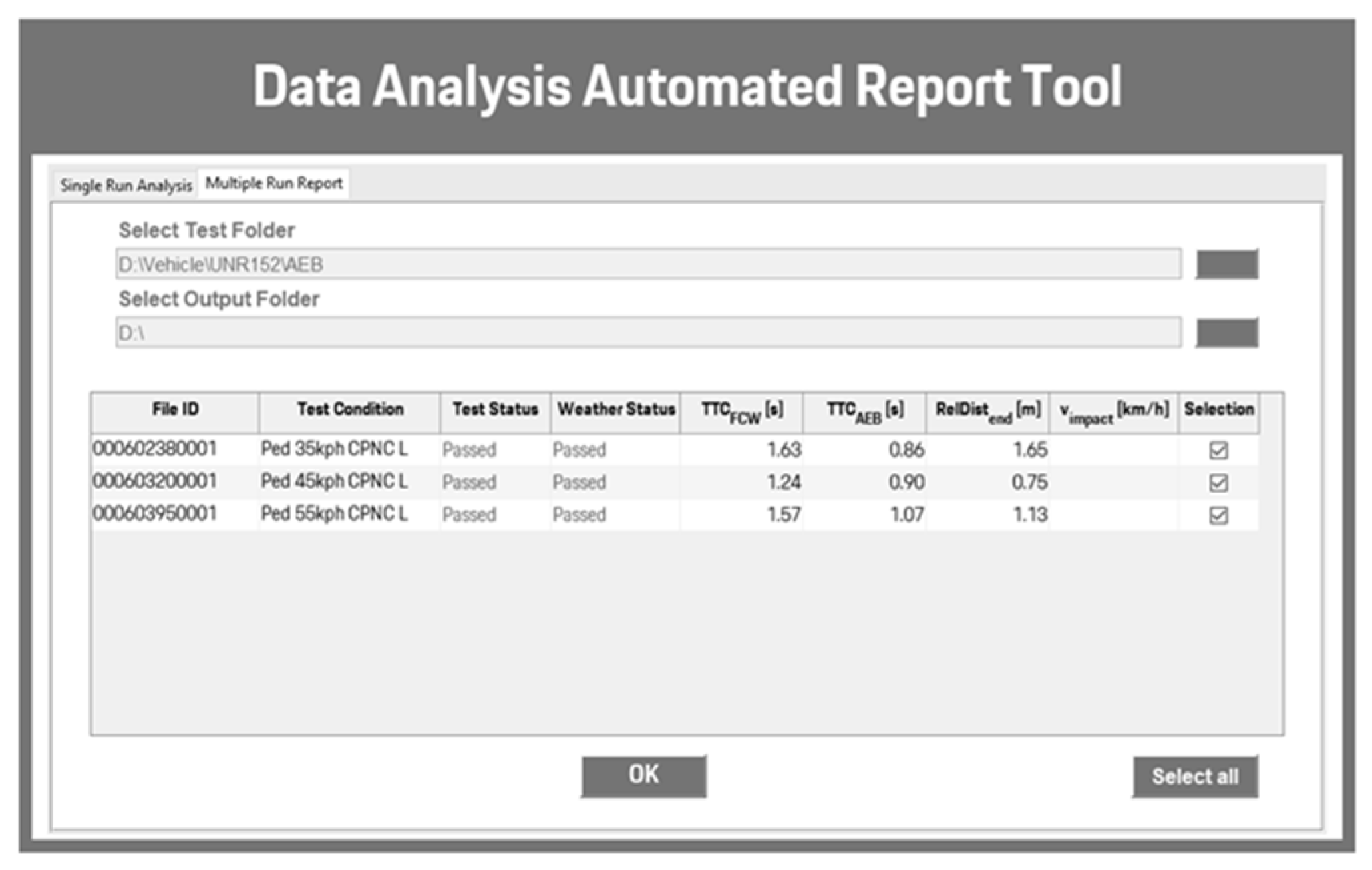
2.5. Multiple Run Report
- -
- File ID, the variable “FILENAME” described in the following;
- -
- Test Condition, the variable “TESTNAME” described in the following;
- -
- Test Status, the result of the post-processing as “Passed” or “Failed”;
- -
- Weather Status, the result of the weather conditions analysis as “Passed” or “Failed”;
- -
- TTCFCW, the value of TTC at the minimum of the video and audio trigger activation time samples;
- -
- TTCAEB, the value of TTC at the AEB trigger activation time sample;
- -
- RelDistend, the value of relative distance at the Tend time sample;
- -
- vimpact, the value of the impact velocity. This value can be empty if there is no collision during the test;
- -
- Selection, the last column editable by the user that is used to select or select one between more runs.
2.6. ADAS Test Replay Tool
- -
- Ego vehicle, chosen from a list of vehicle models;
- -
- Head Tracker vehicle, chosen from a list of vehicle models;
- -
- Start point, chosen from a list of signals: (i) time-to-collision longitudinal, (ii) relative longitudinal distance, (iii) relative lateral distance, and (iiii) default that means the first sample in acquisition;
- -
- End point, chosen from the same list of signals of the start point option (default means the last sample in acquisition).
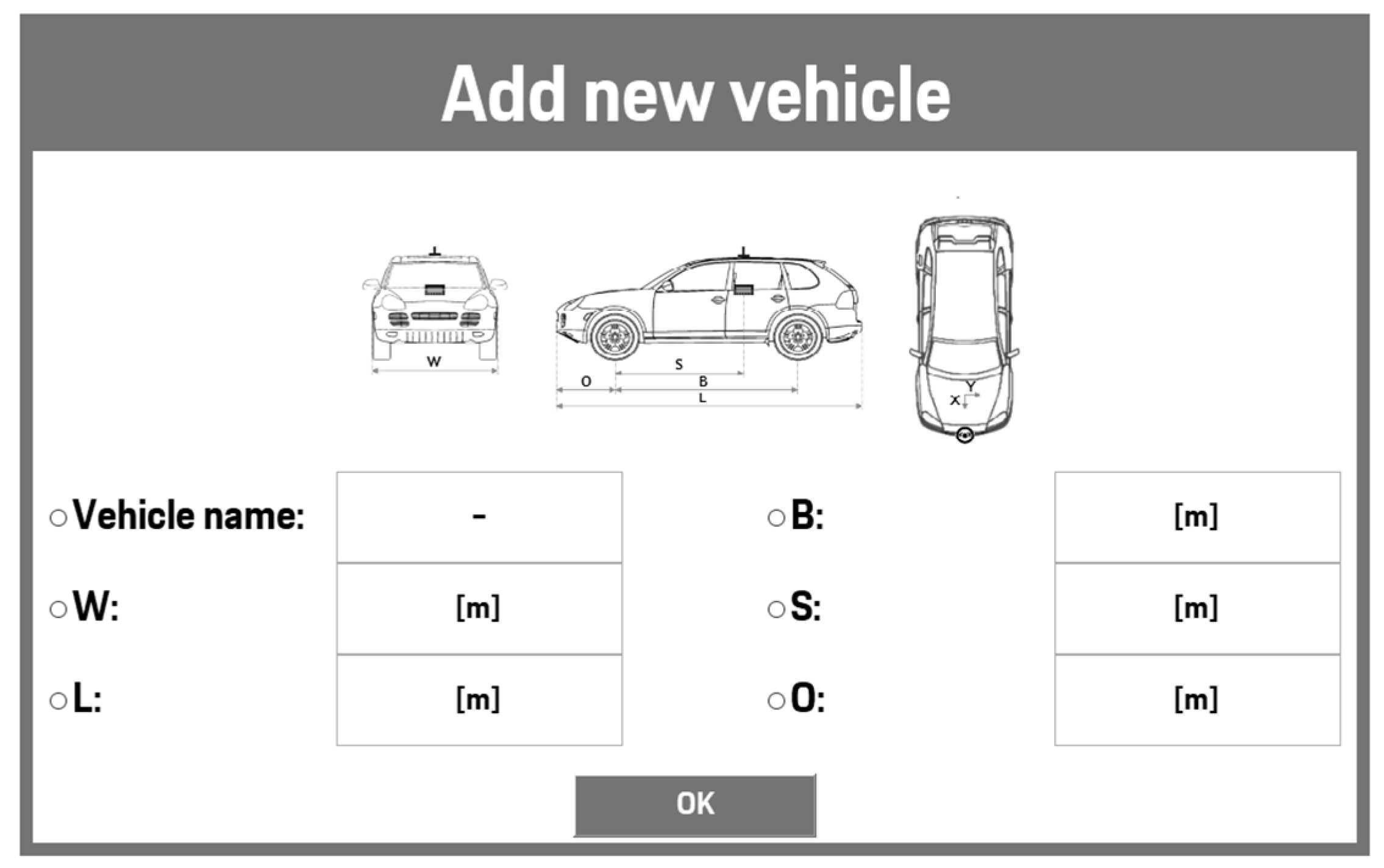
- -
- Vehicle name, a string with the vehicle model name;
- -
- Width (W), measured without the mirrors;
- -
- Length (L), measured from bumper to bumper;
- -
- Wheelbase (B), measured from the front axle to the rear axle;
- -
- Distance from ADMA to the front axle (S);
- -
- Front overhang (O), measured from front axle to front bumper.
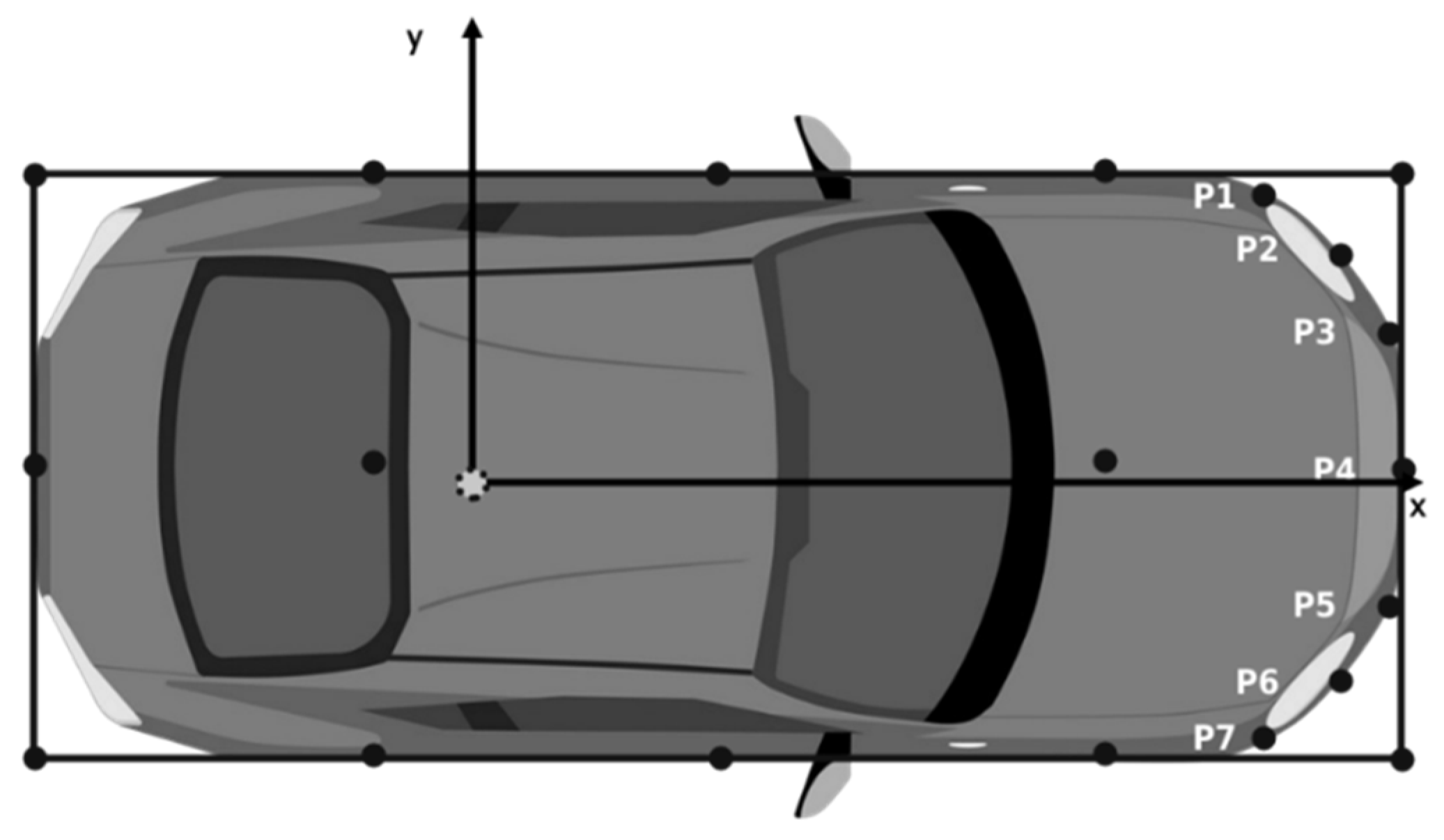
- -
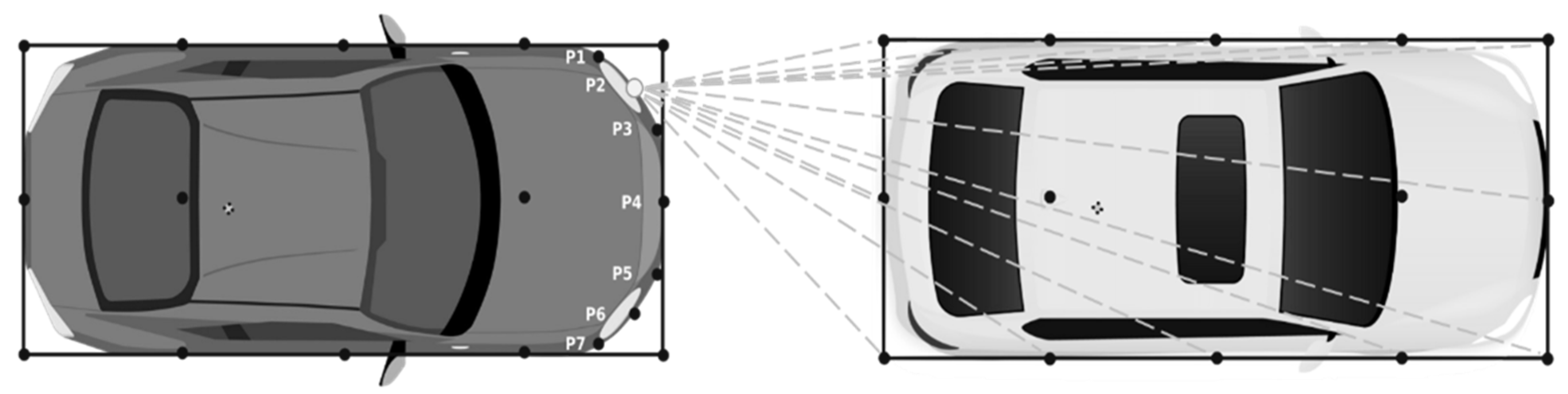
- Vehicle actor, schematized in 20 points, as shown in Figure 9. As specified by the Euro NCAP regulation, the bumper for AEB system testing should be discretized in seven points distributed as reported in Figure 9 (points P1, P2, P3, P4, P5, P6, and P7). The distance between each point (named Segment) shall be as follows, in (3):
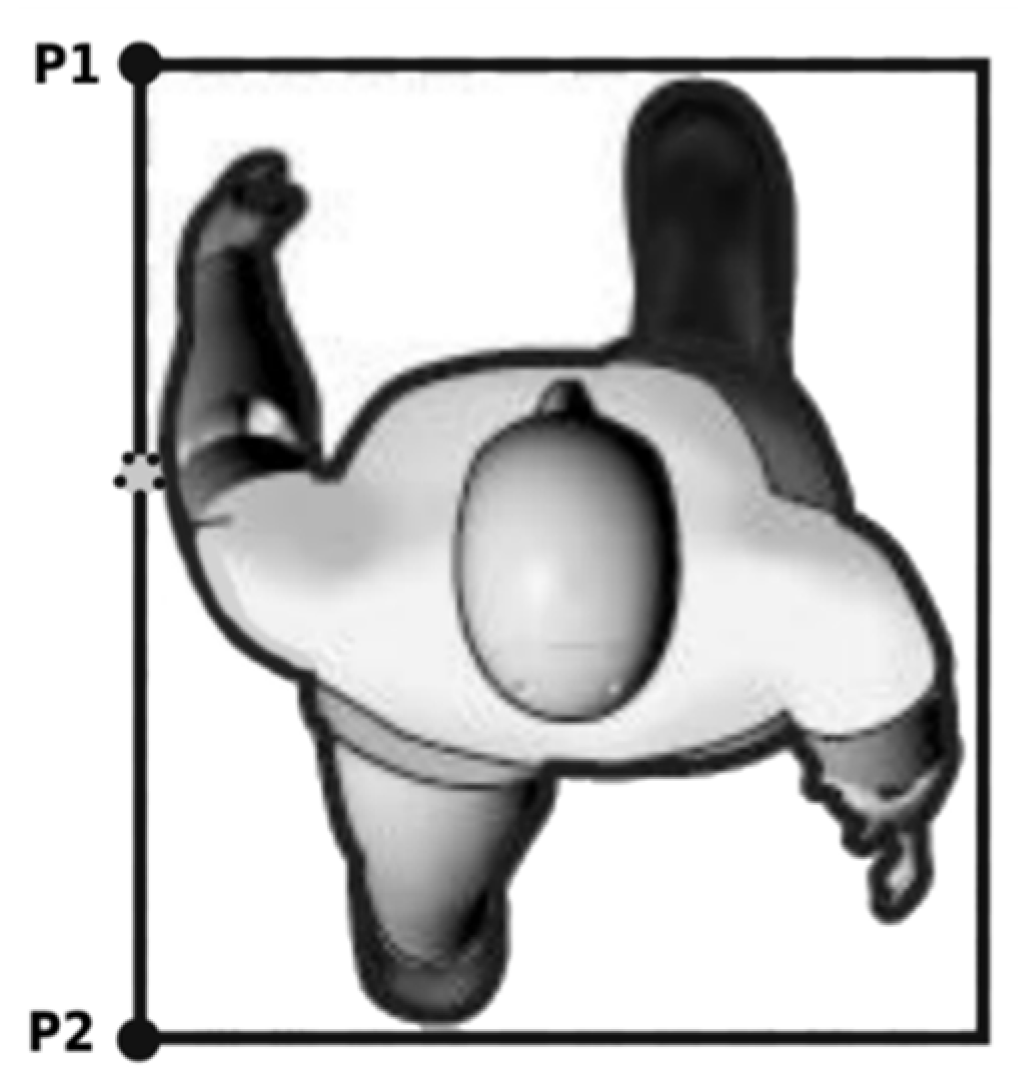
- -
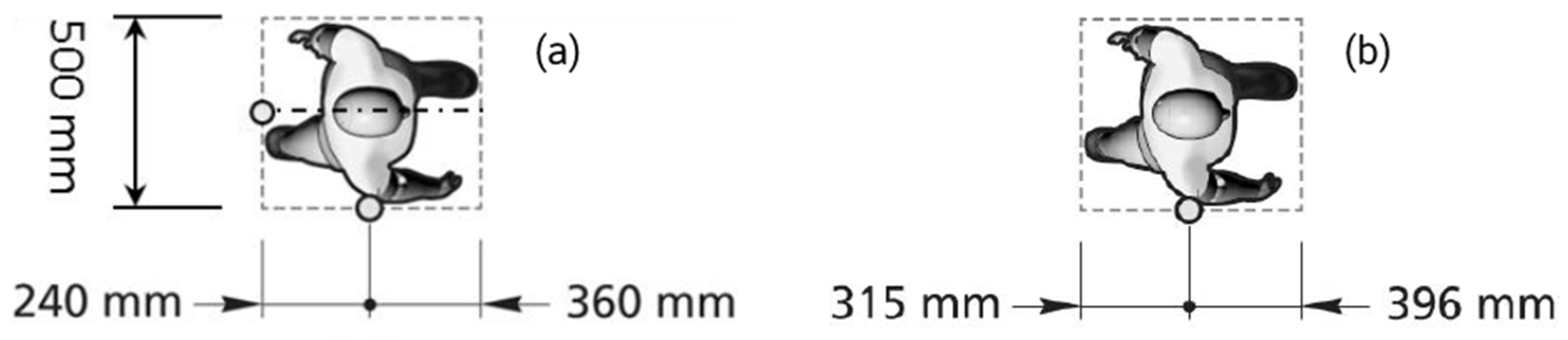
- Pedestrian target (for CPNC tests) schematized in 3 points, as depicted in Figure 10, the reference point position, the front offset (P1), and the rear offset (P2). The Euro NCAP regulation defines the width of the bounding box, which differs for child and adult pedestrians.
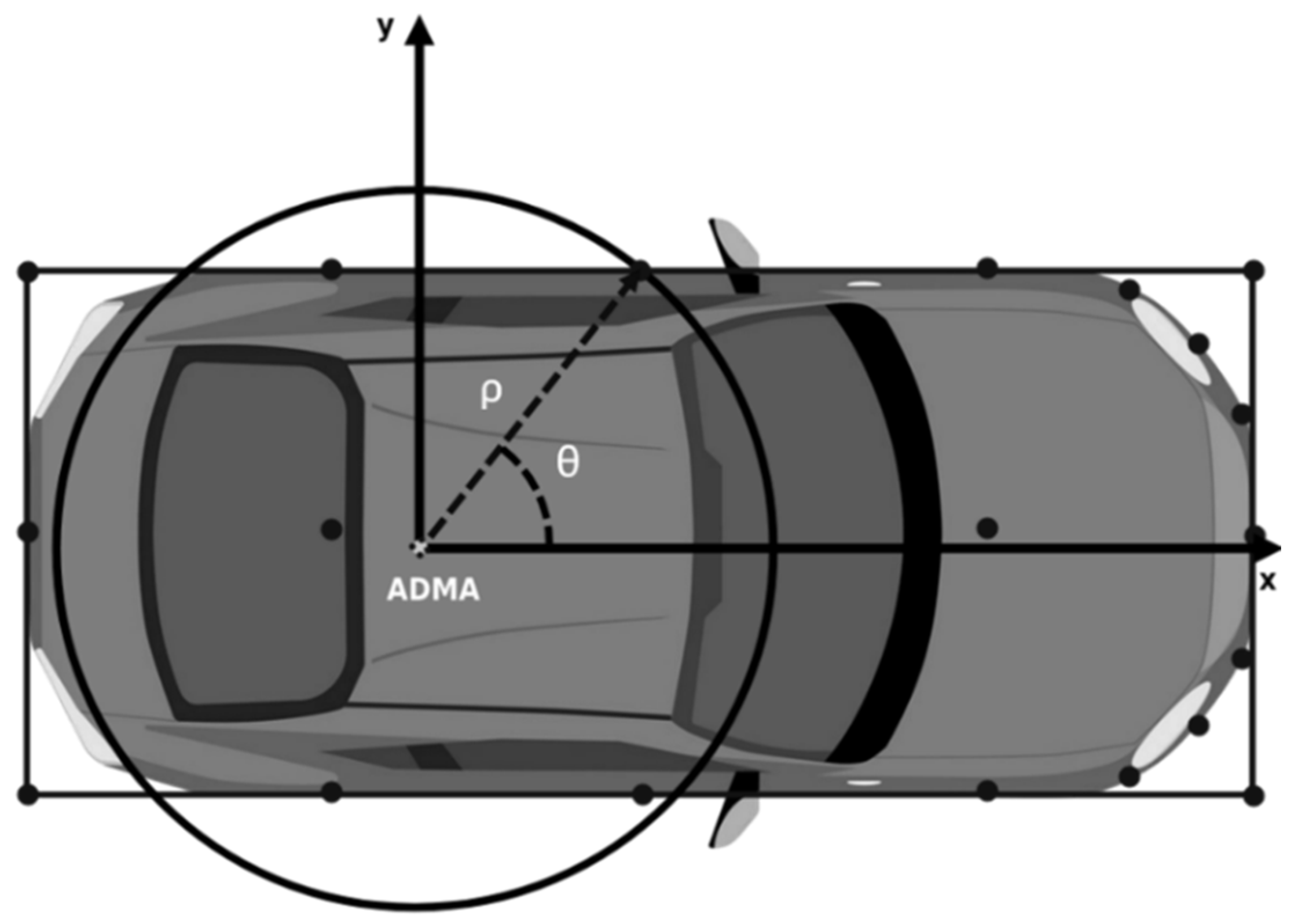
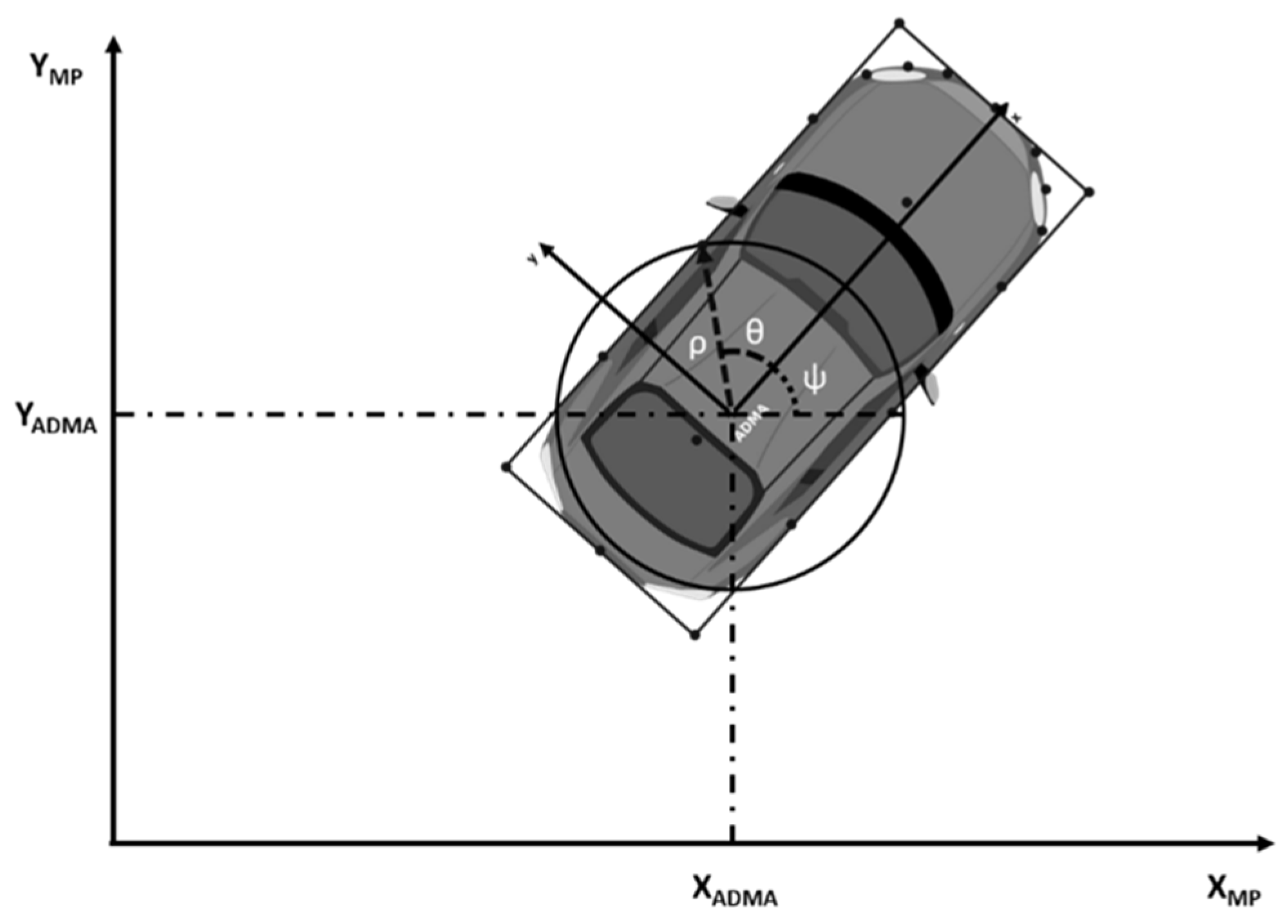
2.7. Kinematic Maneuver, Referring to ADMA Position
Minimum-Distance Evaluation
3. Results
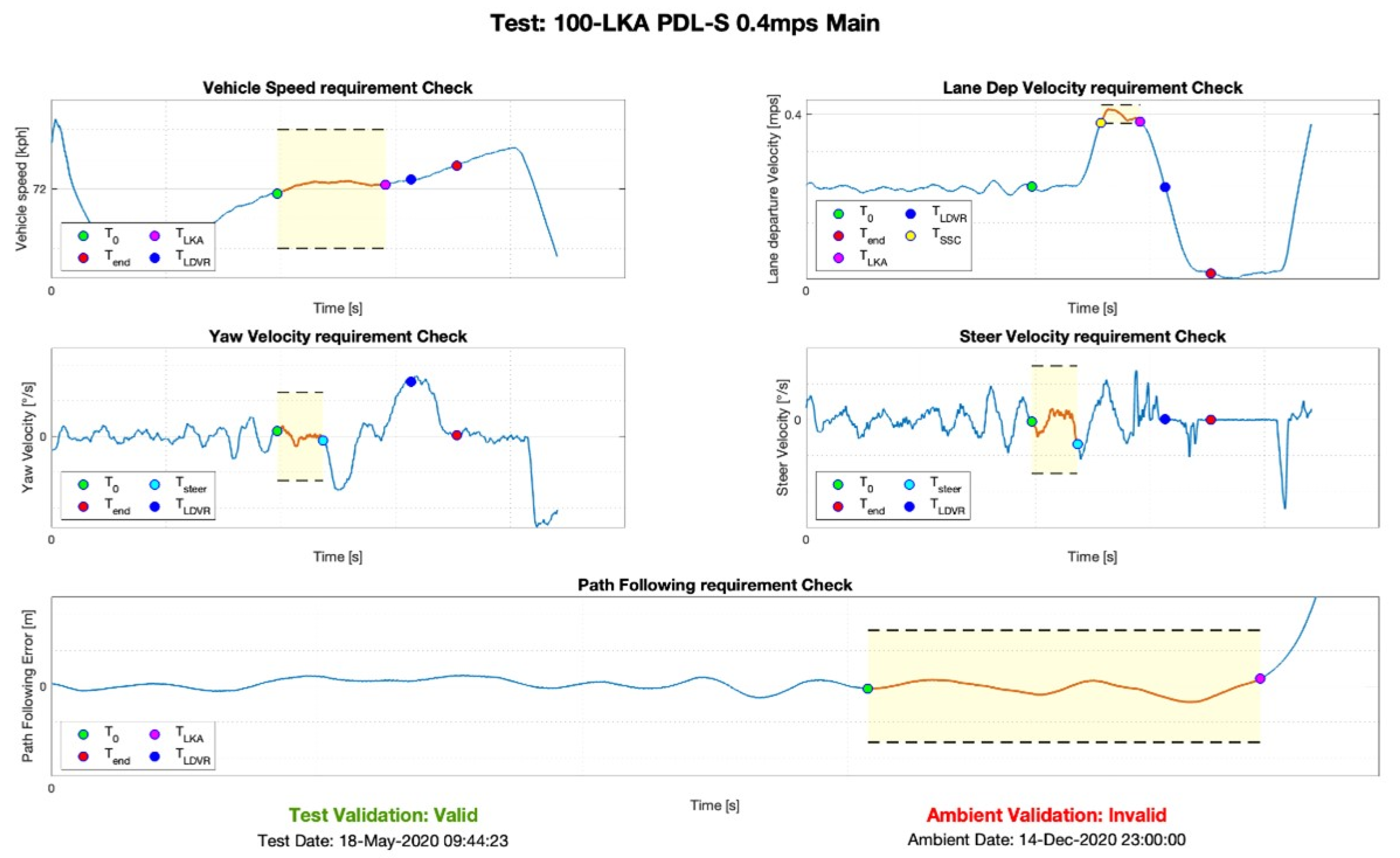
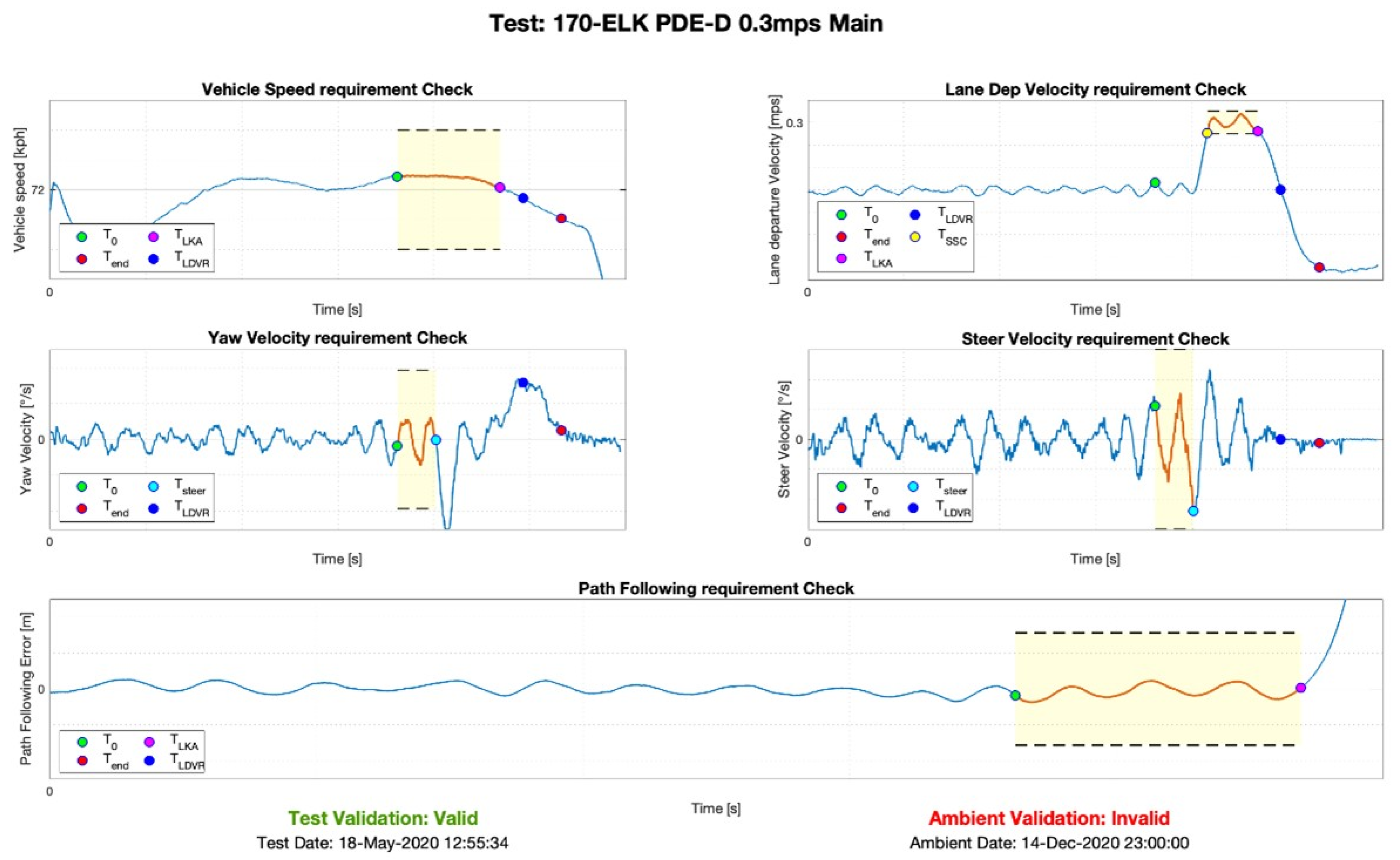
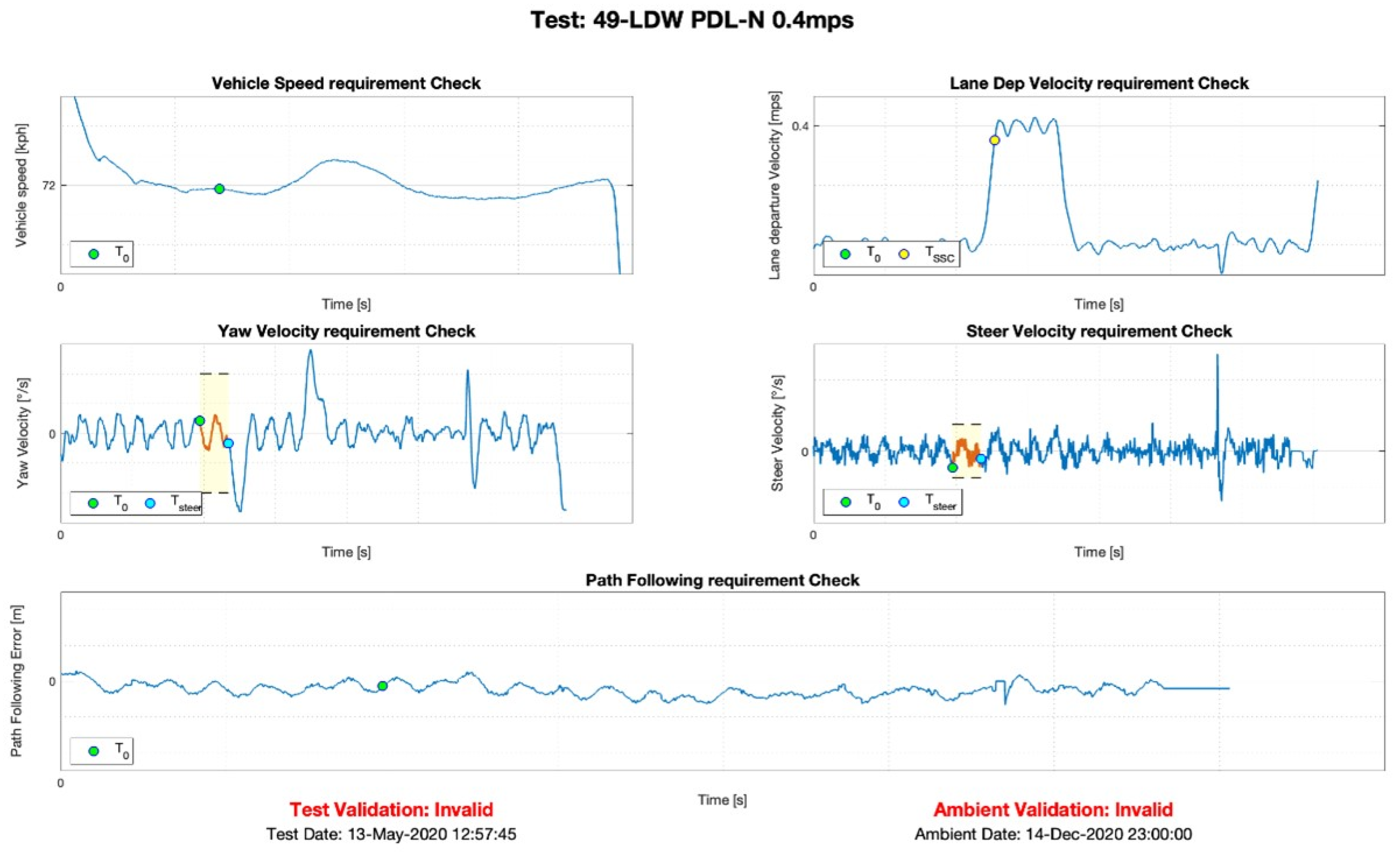
3.1. Post-Processing for LSS Tests
- is the longitudinal velocity of the reference point (km/h);
- is the lateral velocity of the reference point (km/h);
- is the longitudinal velocity of the inertial system (km/h);
- is the lateral velocity of the inertial system (km/h);
- is the longitudinal position of the reference point (m);
- is the lateral position of the reference point (m);
- is the longitudinal position of the inertial system (m);
- is the yaw angle of the inertial system (rad);
- is the filtered angular yaw rate (rad/s).
- -
- TSTEER is automatically identified when the lateral position, measured by IMU, changes from the initial values;
- -
- T0 is directly calculated two seconds lower than TSTEER;
- -
- TLDVR, valid only for the LKA and ELK tests, is defined as the instant in time in which the lane-departure velocity reaches zero after passing the stretch at a constant speed. Therefore, to identify it, the stretch with constant lateral speed was searched (identified as the range in which the lane-departure velocity is included between the test value ± 0.05 m/s) and, starting from the last value of this, the first instant in which the lateral velocity profile reaches the zero value was sought;
- -
- TLKA, valid only for the LKA and ELK tests, is identified as the instant in which the LKA system is activated;
- -
- Tend has a different value according to the test typology: for LDW, it is identified as the time when the system activates, and it corresponds to the instant when the alarm sound is heard; for LKA and ELK is calculated as 2 s after TLDVR.
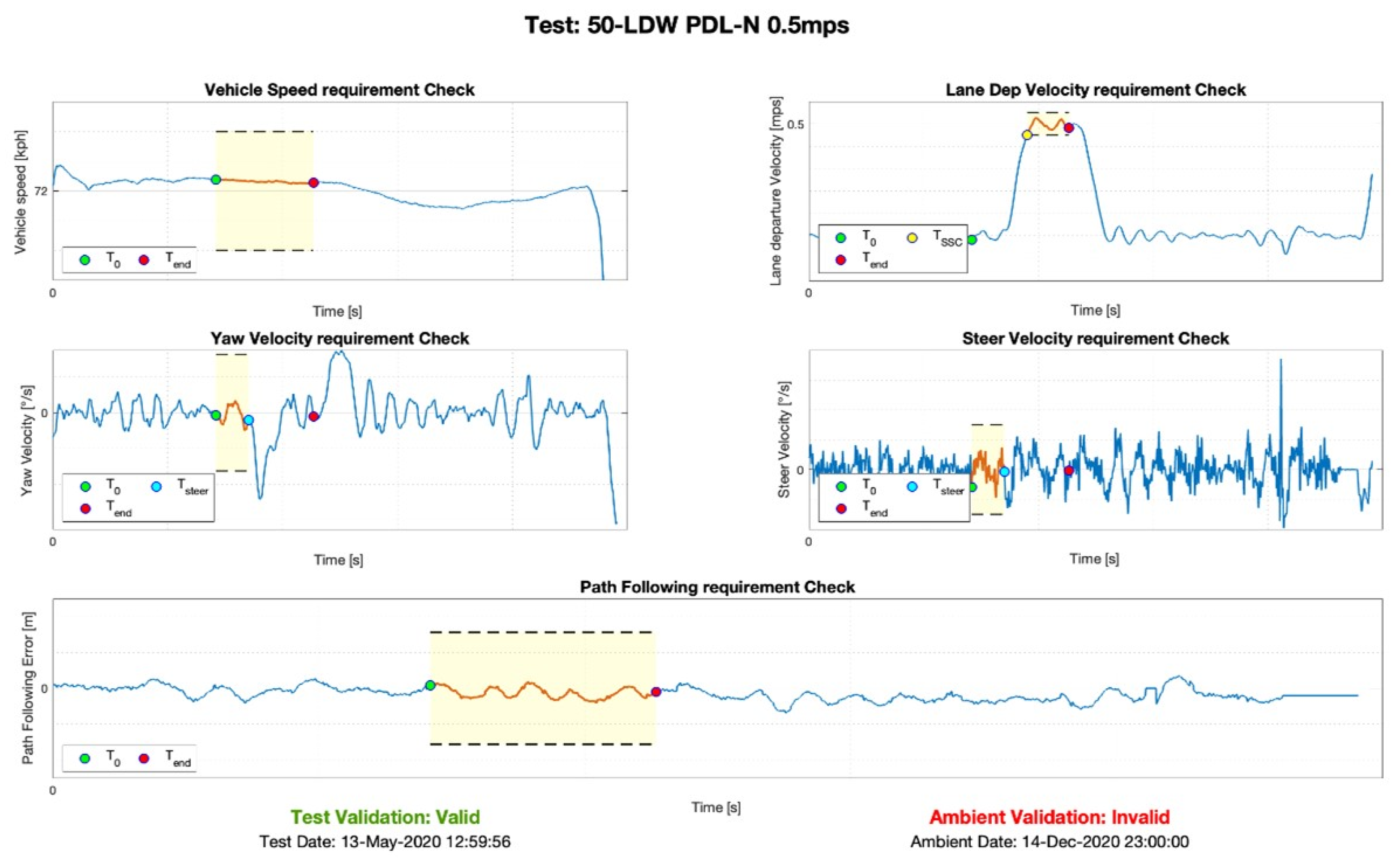
- Vehicle speed, to be analyzed between T0 and Tend, in the case of LDW system, or between T0 and TLKA, in the case of LKA or ELK system, which must be included in a range that goes from 72 − 1 km/h to 72 + 1 km/h;
- Path-following error, to be evaluated between T0 and Tend, in the case of LDW system, or between T0 and TLKA, in the case of LKA or ELK system, which must be null or at most within a range of ±0.05 m;
- Lane-departure velocity, to be considered between TSSC (time in which the stretch begins at constant lateral speed) and Tend, in the case of LDW system, or between TSSC and TLKA, in the case of LKA or ELK system, which must be equal to the value test ± 0.05 m/s;
- Angular speed of yaw, to be analyzed between T0 and Tsteer, which must be equal to zero or at most within a range of ±1°/s;
- Steering angular speed, to be evaluated between T0 and Tsteer, which must be zero or at most within a range of ±15°/s.
- Temperature, which must be between 5 and 40 °C;
- Wind speed, which must be less than 10 m/s;
- Rain rate and presence of rain, which must be zero;
- Brightness value, which must be higher than 2000 lux.
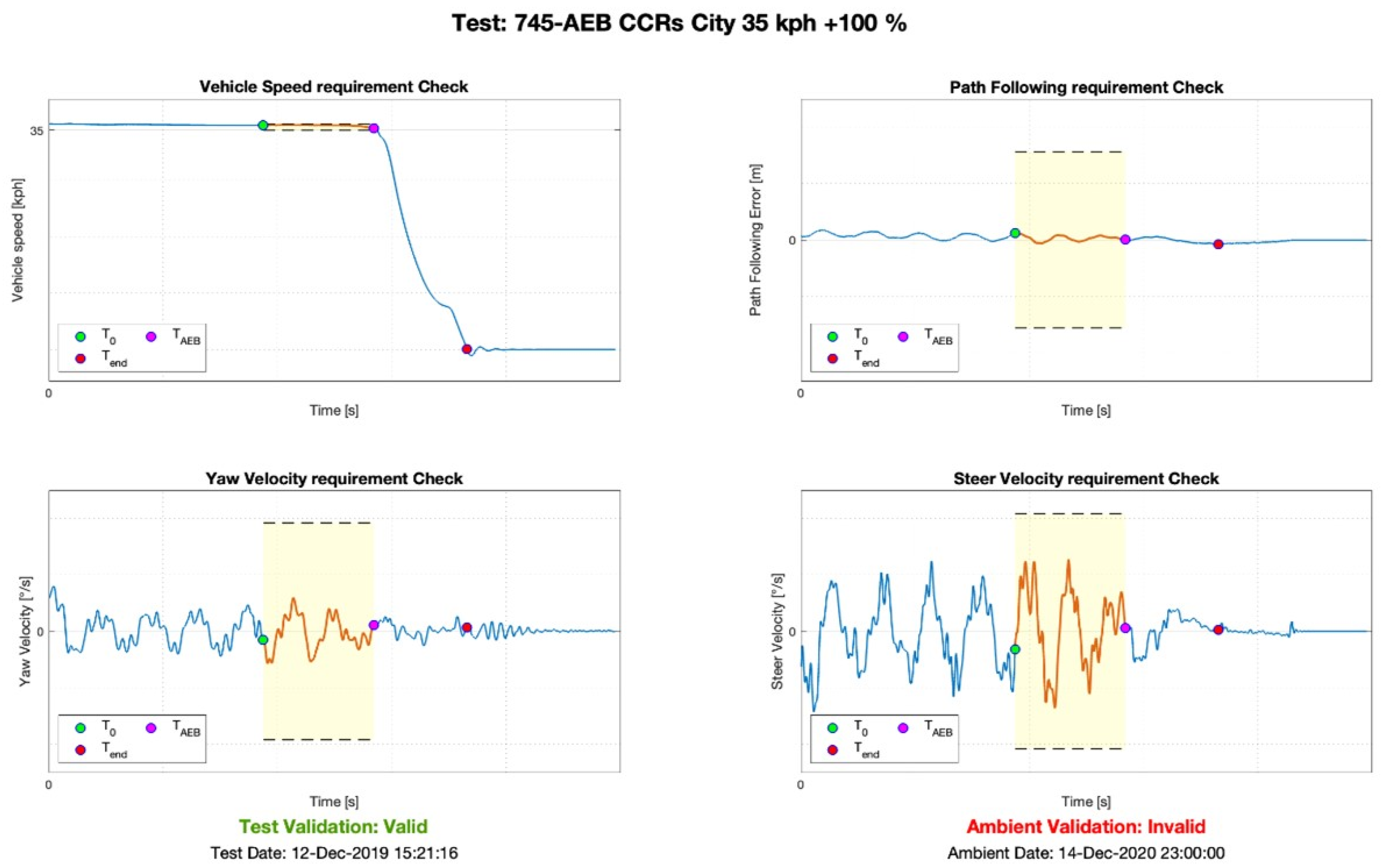
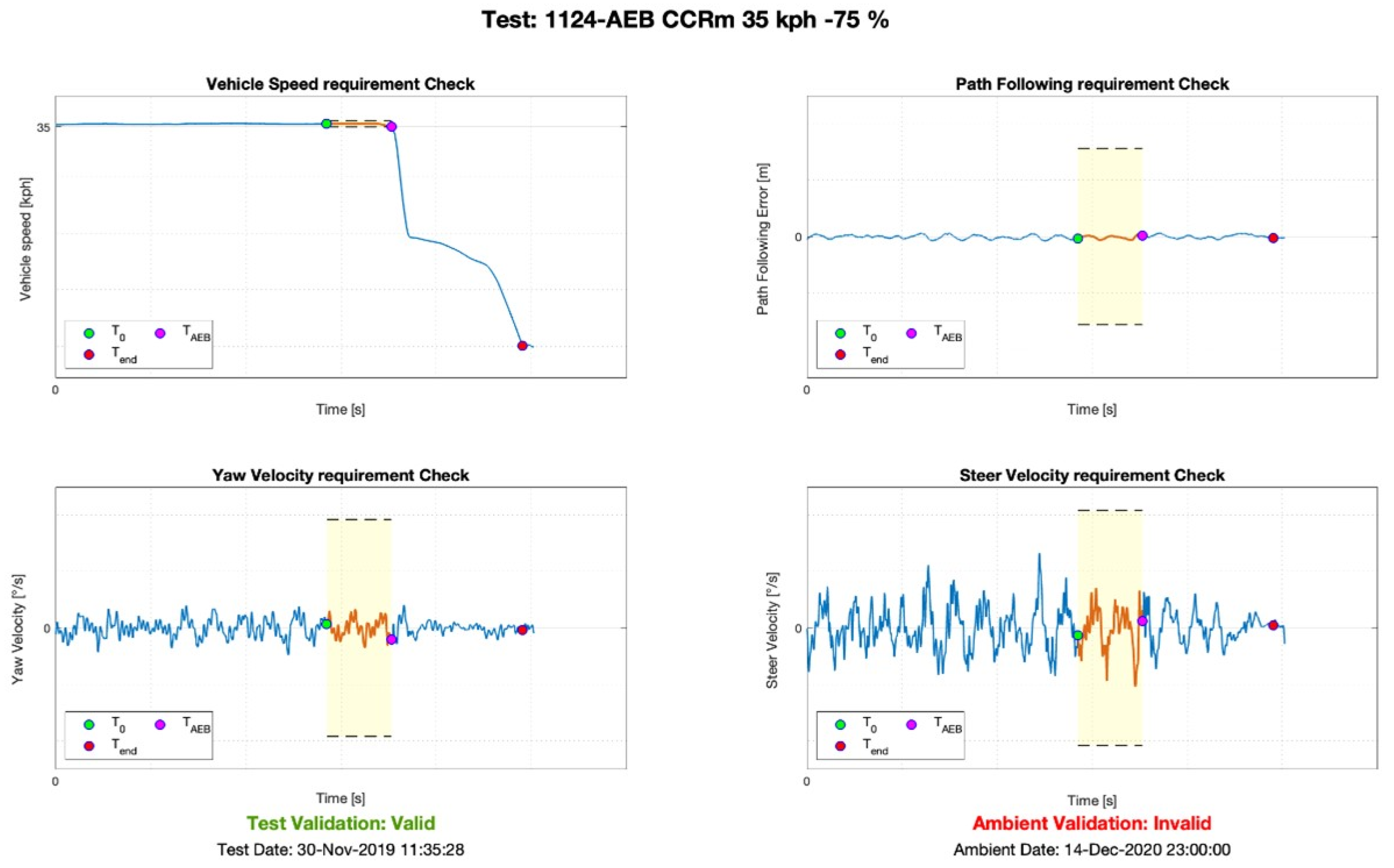
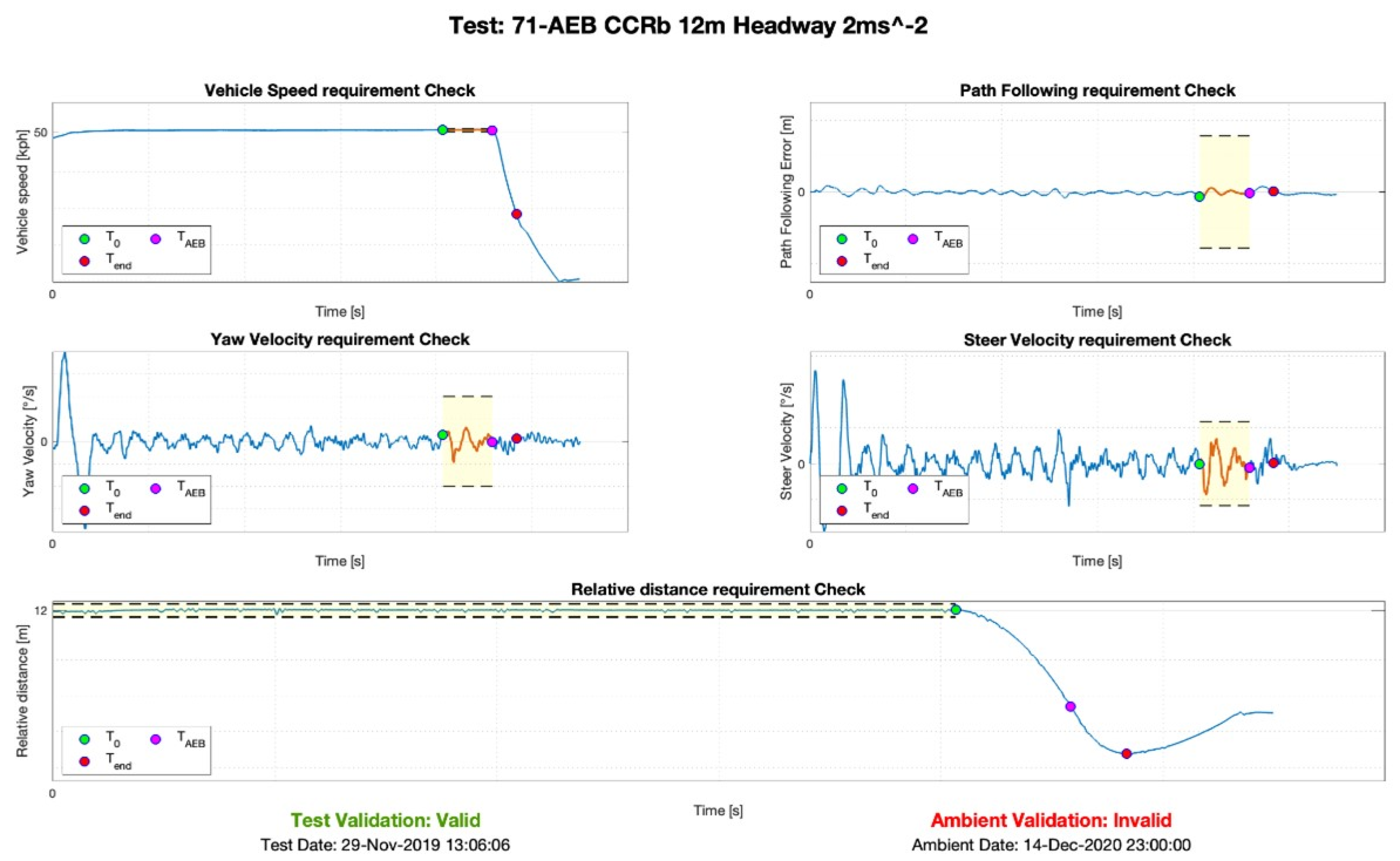
3.2. Post-Processing for AEB Tests
- -
- TAEB is the time in which the AEB system is activated, and it can be identified, as specified by the regulations, as the instant in time in which the acceleration of the VUT intersects the value −0.3 m/s2, in the interval that goes from T0 to Tend;
- -
- TIMPACT corresponds to the instant in which the two vehicles involved in the test collide: in analytical form, it is identified as the temporal instant in which the relative distance between the reference points of the vehicles is zero;
- -
- TVZERO identifies the instant in which the speed of the VUT is canceled. The identification was made by detecting in the interval between T0 and Tend, the instant in which the speed assumes a null value;
- -
- Tend is the minimum between TIMPACT and the time when VUT velocity becomes zero or lower than GVT velocity.
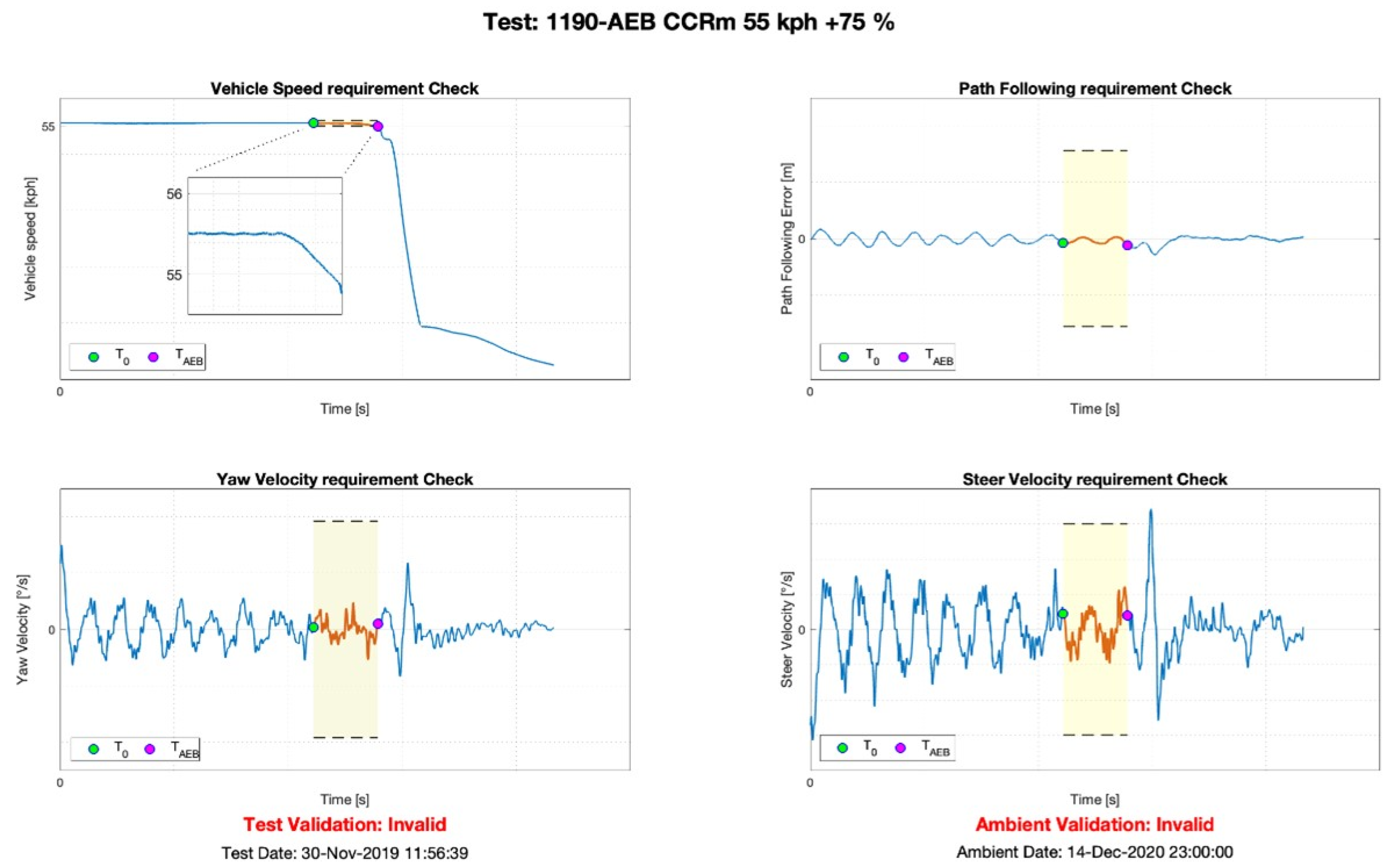
- Vehicle speed, which for the CCRs and CCRm categories must respect the limits imposed by the particular type of test + 1 km/h (for example, if the test is carried out at a VUT speed of 50 km/h, the condition to respect is that the profile in the designated range is between 50 and 51 km/h);
- Path-following error, which must be equal to the null value ± 0.05 m;
- Angular speed of yaw, which must be equal to 0 ± 1°/s;
- Steering angular speed must be between −15 and 15°/s.
- Ambient temperature, between 5 and 40 °C;
- Ambient lighting, higher than 2000 lux;
- Wind speed, not exceeding 10 m/s;
- Presence of precipitation, equal to 0 mm.
- Highlighted area, representing the test area of interest, between T0 and TAEB;
- Points of interest of different colors, which highlight the value assumed by each variable in the instants of time reported;
3.3. Post-Processing for CPNC Tests
- -
- Computation of time error (wireless data-transfer time delay from target to subject unit) as expressed in (13), where incoming-data-extrapolation time is the time of each received sampled signal:
- -
- Resampling signals in the new time series using the computed time error.
- -
- Evaluation of step-back samples for audio and video signals (14):
- -
- Evaluation of FCW video trigger sample, finding the first value different from 0.
- -
- Evaluation of FCW audio trigger sample, finding the first value different from 0. This is completed by cleaning the signal from false positives obtained from noises during the test execution.
- -
- VUT velocity is 0 km/h;
- -
- VUT velocity is less than the other actor velocity;
- -
- VUT collides with the other actor.
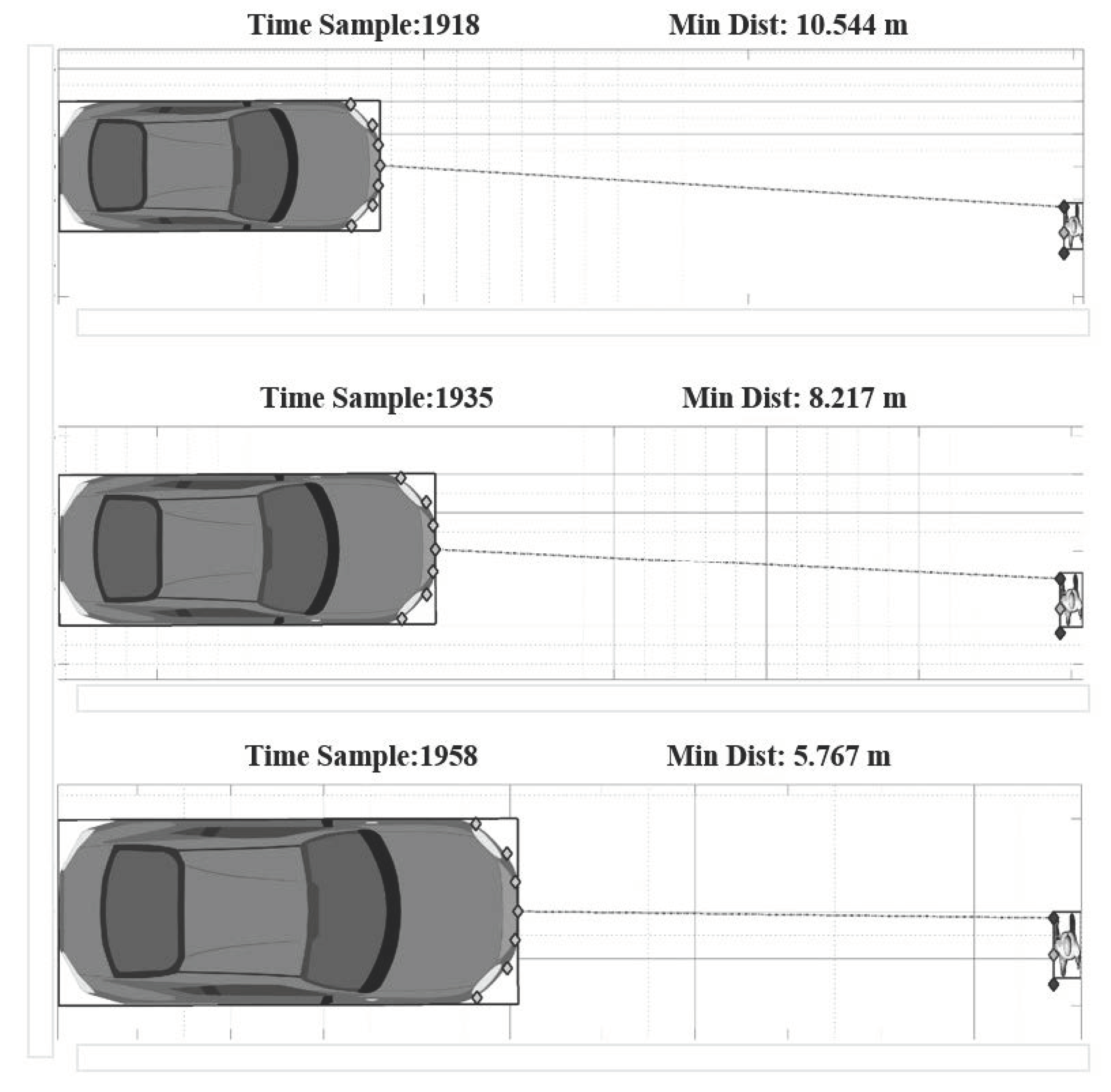
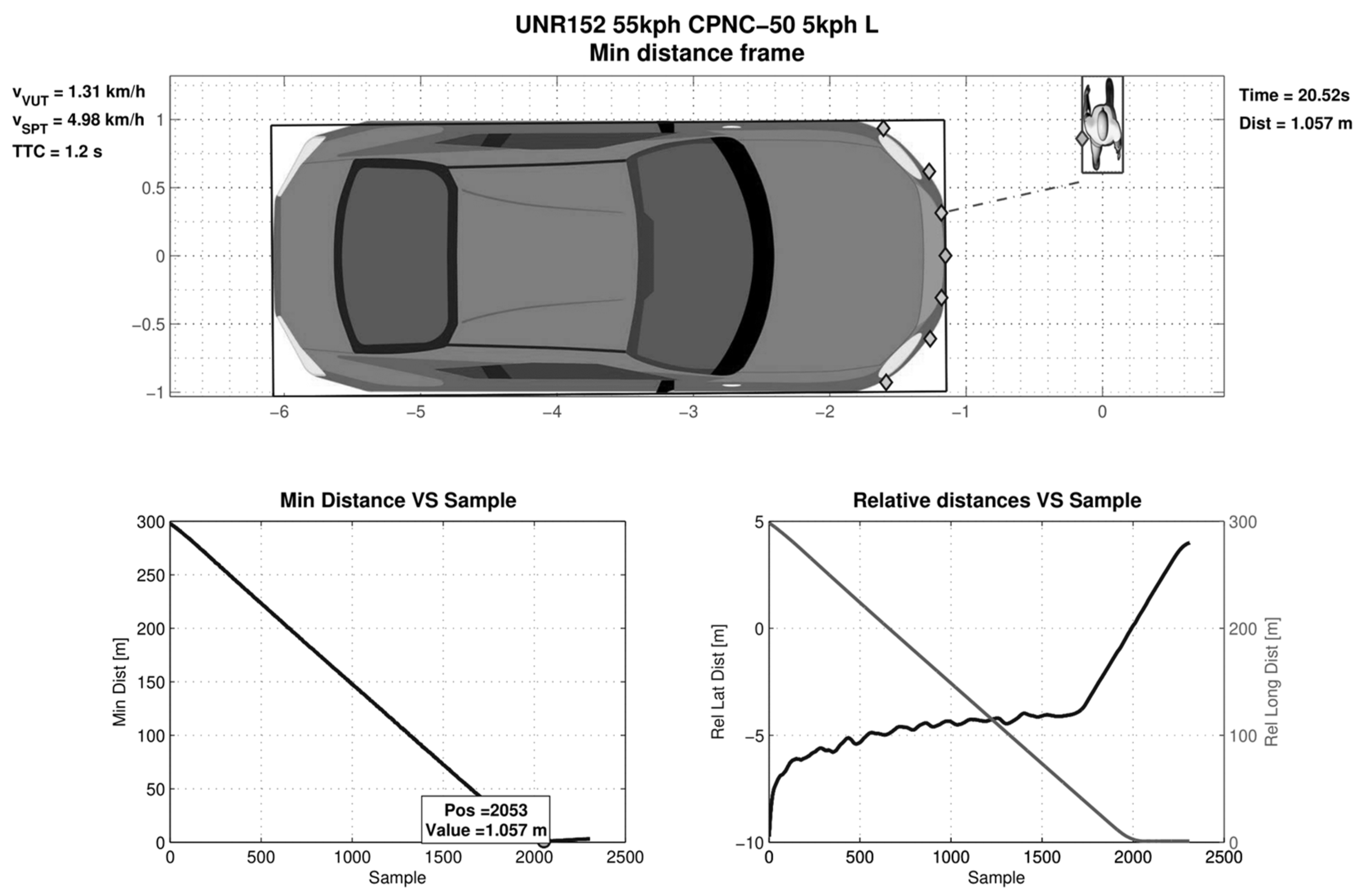
3.4. Visualization of the Maneuver: Test Replay Tool
- -
- Actors positioning and minimum distance representation;
- -
- Minimum distance versus time sample graph;
- -
- Relative longitudinal and lateral distances versus time sample graph.
4. Discussion
- Need to improve the process of generating maneuvers for ADASs (data-analysis tool), ensuring a correct display of the distances between vehicles and the times in which the maneuvers occur.
- Need to improve the post-processing process of normalized tests for ADASs (post-processing routines), in particular for LSS, AEB, and CPNC, allowing the introduction of additional information compared to software currently used in the company relating to the validation of environmental conditions and to variables that were not considered by the same.
- Need to generate an algorithm for automatically writing results on a specific spreadsheet to provide the customer with a complete test report.
5. Conclusions
- The implementation of the post-processing routine in the VeDApost environment (Vehicle Dynamics Analysis Postprocessing), an internal software owned by Porsche created in collaboration with Porsche Motorsport and with the entire Volkswagen group, which works in the MATLAB environment and us allows to import, archive, and analyze the data relating to each type of measurement carried out on the track.
- A 3D-type visualization of the maneuver was introduced in the MATLAB environment by importing the obtained data into a MATLAB tool called Driving Scenario Designer [24]; about this point, some interesting preliminary results have already been carried out.
Author Contributions
Funding
Conflicts of Interest
References
- Road Safety: What Progress Has Been Made? Available online: https://roadsafetyfacts.eu/road-safety-what-progress-has-been-made (accessed on 27 June 2022).
- Cafiso, S.; Pappalardo, G. Safety effectiveness and performance of lane support systems for driving assistance and automation—Experimental test and logistic regression for rare events. Accid. Anal. Prev. 2020, 148, N.105791. [Google Scholar] [CrossRef] [PubMed]
- Sternlund, S.; Strandroth, J.; Rizzi, M.; Lie, A.; Tingvall, C. The effectiveness of lane departure warning systems—A reduction in real world passenger car injury crashes. Traffic Inj. Prev. 2017, 18, 225–229. [Google Scholar] [CrossRef] [PubMed]
- Branstom, M.; Coelingh, E.; Sjoberg, L. Decision-making on when to brake and when to steer to avoid a collision. Int. J. Veh. Saf. 2014, 7, 87–106. [Google Scholar] [CrossRef]
- Eidehall, A.; Pohl, J.; Gustafsson, F.; Ekmark, J. Towards autonomous collision avoidance by steering. IEEE Trans. Intell. Transp. Syst. 2007, 8, 84–94. [Google Scholar] [CrossRef]
- Chelbi, N.A.; Gingras, D.; Sauvanage, C. Proposal of a new virtual evaluation approach of preventive safety applications and advanced driver assistance functions–application: AEB system. IET Intell. Transp. Syst. 2018, 12, 1148–1156. [Google Scholar] [CrossRef]
- Lomartire, S.; Giannoccaro, N.I.; Toma, A. A smart procedure for data analysis relative to a vehicle ‘Coast-down’ test. Int. J. Veh. Syst. Model. Test. 2021, 15, 122–140. [Google Scholar] [CrossRef]
- Test Protocol—Lane Support Systems, version 3.0.2; European New Car Assessment Programme; REV 07/2019; Euro NCAP: Leuven, Belgium, 2019.
- Test Protocol—AEB Car-to-Car Systems, version 3.0.2; European New Car Assessment Programme; REV 07/2019; Euro NCAP: Leuven, Belgium, 2019.
- United Nations Economic Commission for Europe (United Nations Economic and Social Council). UN Regulation No 152. Off. J. Eur. Union 2020, L 360, 66–89. [Google Scholar]
- The Matworks. Matlab, R2020b; The MathWorks Inc.: Natick, MA, USA, 2020. [Google Scholar]
- Assessment Protocol—Safety Assist, version 9.0.1; European New Car Assessment Programme; REV 02/2019; Euro NCAP: Leuven, Belgium, 2019.
- GB/T 39901-2021; Performance Requirements and Tests Methods for Advanced Emergency Braking System (AEBS) of Passenger Cars. National Standard of the People’s Republic of China: Beijing, China, 2009.
- Department of Transportation; National Highway Traffic Safety Administration Docket. Visual-Manual NHTSA Driver Distraction Guidelines for In-Vehicle Electronic Devices; Department of Transportation; National Highway Traffic Safety Administration Docket: Washington, DC, USA, 2013; N° NHTSA-2010-0053. [Google Scholar]
- Shimakage, M.; Kawazoe, H.; Sadano, O.; Murakami, T. Design of Lane-Keeping Control with Steering Torque Input for a Lane Keeping Support System. SAE Trans. J. Passeng. Car Mech. Syst. J. 2001, 110, 448–455. [Google Scholar]
- Comolli, F.; Gobbi, M.; Mastinu, G. Study on the Driver/Steering wheel interaction in emergency situations. Appl. Sci. 2020, 10, 7055. [Google Scholar] [CrossRef]
- Mukhopadhyay, P.; Chaudhuri, B.B. A survey Hough Transform. Pattern Recognit. 2015, 48, 993–1010. [Google Scholar] [CrossRef]
- Abaya, K.A. Investigating the nature and impact of reporting bias in road crash data. Transp. Res. Part A Policy Pract. 2015, 71, 31–45. [Google Scholar] [CrossRef]
- Visconti, P.; Iaia, F.; de Fazio, R.; Giannoccaro, N.I. A Stake-Out Prototype System Based on GNSS-RTK Technology for Implementing Accurate Vehicle Reliability and Performance Tests. Energies 2021, 14, 4885. [Google Scholar] [CrossRef]
- Anju, M.K. Design of Butterworth and Chebyshev1 Lowpass Filter for Equalized Group Delay. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2012, 2, 524–528. [Google Scholar]
- Kapse, R.; Adarsh, S.; Ritesh, K. Implementing an Autonomous Emergency Braking with Simulink using two Radar Sensors. arXiv 2019, arXiv:1902.11210. [Google Scholar]
- Available online: https://www.abdynamics.com/en/news/2020/robot-controller-software-version-9-00-releasing-early-2021 (accessed on 27 June 2022).
- Schubert, A.; Erbsmehl, C.; Hannawald, L. Standardized pre-crash scenarios in digital format on the basis of the VUFO simulation input data from GIDAS. In Proceedings of the 5th International Conference on ESAR, Expert Symposium on Accident Research, Hanover, Germany, 7–8 September 2012; pp. 366–372. [Google Scholar]
- Available online: https://it.mathworks.com/help/driving/ref/drivingscenariodesigner-app.html (accessed on 27 June 2022).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | Validity Conditions | Time Range for Validity |
|---|---|---|
| VUT GPS velocity | 72 ± 1 km/h | T0–TLKA/LDW |
| Path-following error | 0 ± 0.05 m | T0–TLKA/LDW |
| Lane-departure velocity in the stationary part | VOT ± 0.05 m/s | TSSC–TLKA/LDW |
| VUT angular yaw rate | 0 ± 1°/s | T0–TSTEER |
| Angular speed of the VUT steering | 0 ± 15°/s | T0–TSTEER |
| Signal | Validity Conditions | Time Range for Validity |
|---|---|---|
| VUT GPS velocity | VOT + 1 km/h | T0–TAEB/FCW |
| GVT GPS velocity | VOT ± 1 km/h | T0–TAEB/FCW |
| Path-following error (VUT) | 0 ± 0.05 m | T0–TAEB/FCW |
| Path-following error (GVT) | 0 ± 0.05 m | T0–TAEB/FCW |
| VUT angular yaw rate | 0 ± 1°/s | T0–TAEB/FCW |
| GVT angular yaw rate | 0 ± 1°/s | T0–TAEB/FCW |
| Angular speed of the VUT steering | 0 ± 15°/s | T0–TAEB/FCW |
| Relative distance (scenario CCRb) | DOT ± 0.5 m | T0–TAEB/FCW |
| Signal | Limits | Time Range |
|---|---|---|
| VUT velocity | Nominal ÷ Nominal − 2 km/h | T0–TFCW |
| SPT velocity | 5 km/h ± 2 km/h | TSPT,start moving–TFCW |
| VUT yaw rate | 0°/s ± 1°/s | T0–TFCW |
| VUT steering rate | 0°/s ± 15°/s | T0–TFCW |
| VUT path-following error | 0 m ± 0.1 m | T0–TFCW |
| Signal | Limits |
|---|---|
| Ambient temperature | 0 °C: 45 °C |
| Wind speed | ≤36 km/h |
| Rainfall | 0 mm |
| Illuminance | ≥2000 lux |
| Sun altitude | ≥15° |
| Point | X | Y | |
|---|---|---|---|
| Front Bumper | Left | ||
| Middle | |||
| Right | |||
| Rear Bumper | Left | ||
| Middle | |||
| Right | |||
| Front Axle | Left | ||
| Middle | |||
| Right | |||
| Rear Axle | Left | ||
| Middle | |||
| Right | |||
| Middle Vehicle | Left | ||
| Right | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dollorenzo, M.; Dodde, V.; Giannoccaro, N.I.; Palermo, D. Simulation and Post-Processing for Advanced Driver Assistance System (ADAS). Machines 2022, 10, 867. https://doi.org/10.3390/machines10100867
Dollorenzo M, Dodde V, Giannoccaro NI, Palermo D. Simulation and Post-Processing for Advanced Driver Assistance System (ADAS). Machines. 2022; 10(10):867. https://doi.org/10.3390/machines10100867
Chicago/Turabian StyleDollorenzo, Matteo, Vincenzo Dodde, Nicola Ivan Giannoccaro, and Davide Palermo. 2022. "Simulation and Post-Processing for Advanced Driver Assistance System (ADAS)" Machines 10, no. 10: 867. https://doi.org/10.3390/machines10100867