In order to verify the effectiveness of the proposed method, the proposed method is validated by designing a case study for different working conditions and following the vehicle. The validation scheme includes the determination of parameters in the analysis of the flexible decay function, the effect of multi-vehicle following in different operating conditions in the ring simulation, and the effectiveness of stable multi-vehicle following in the actual multi-vehicle following process.
3.2.2. Simulation Verification of Different Working Conditions
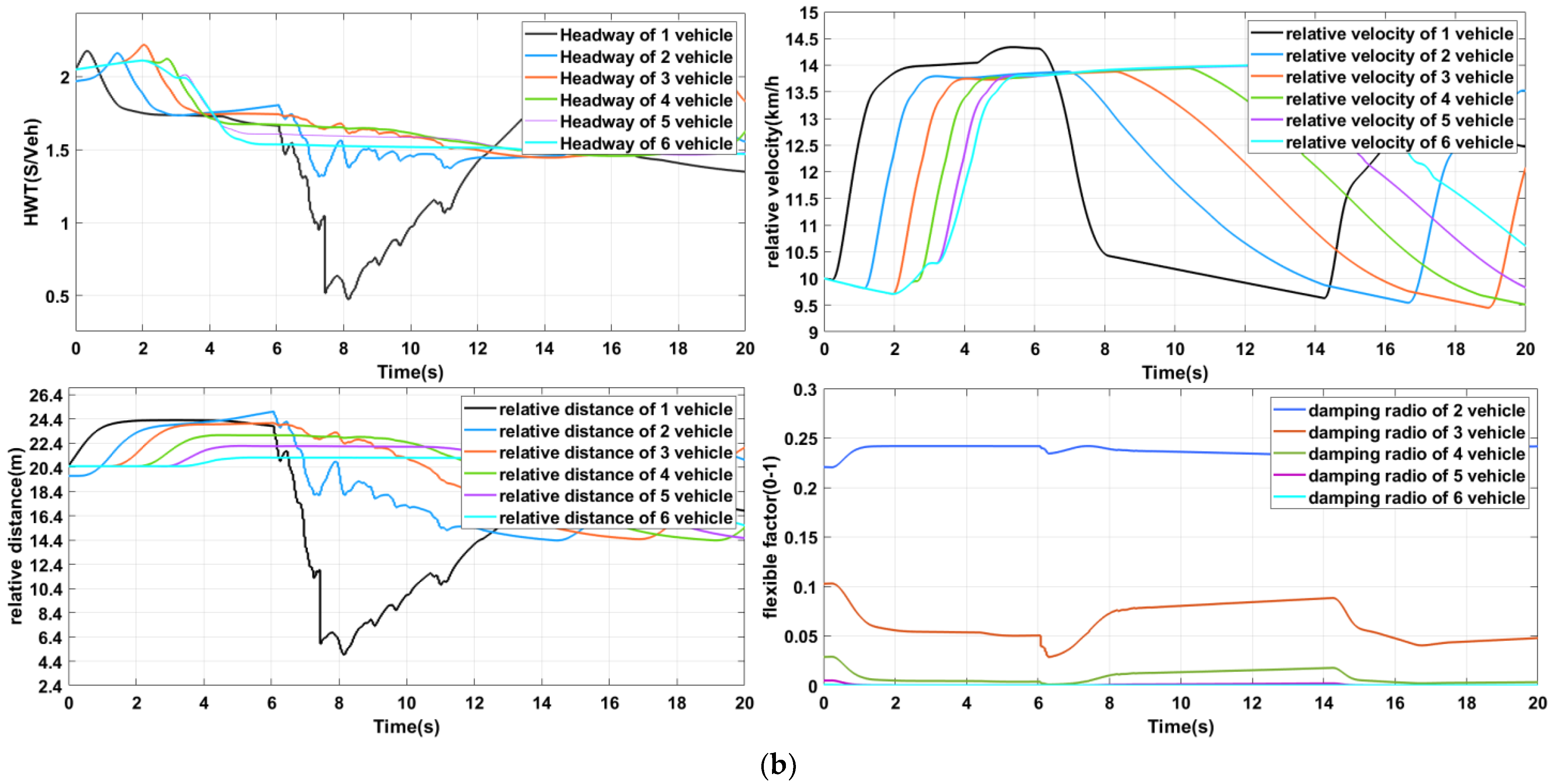
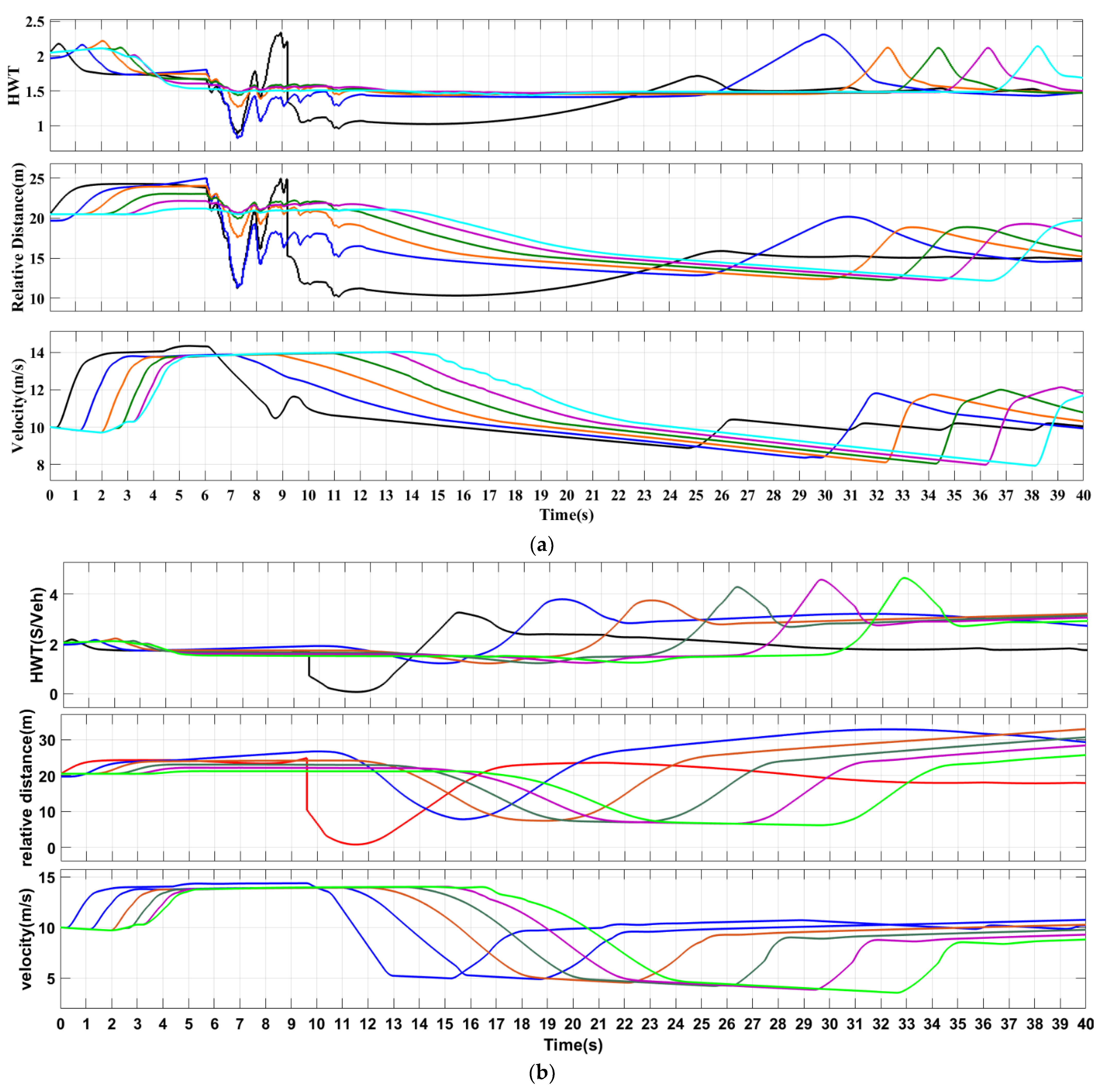
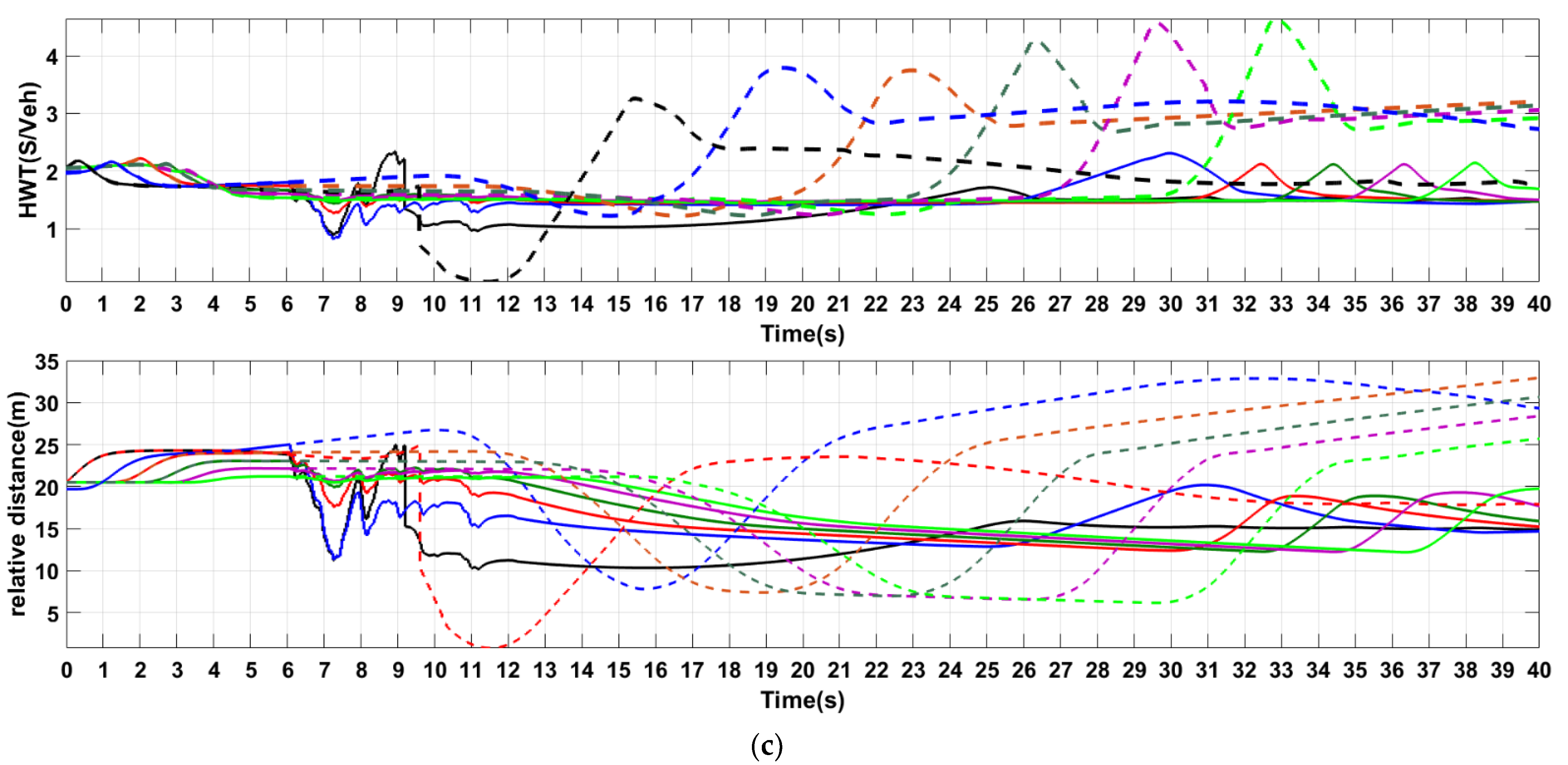
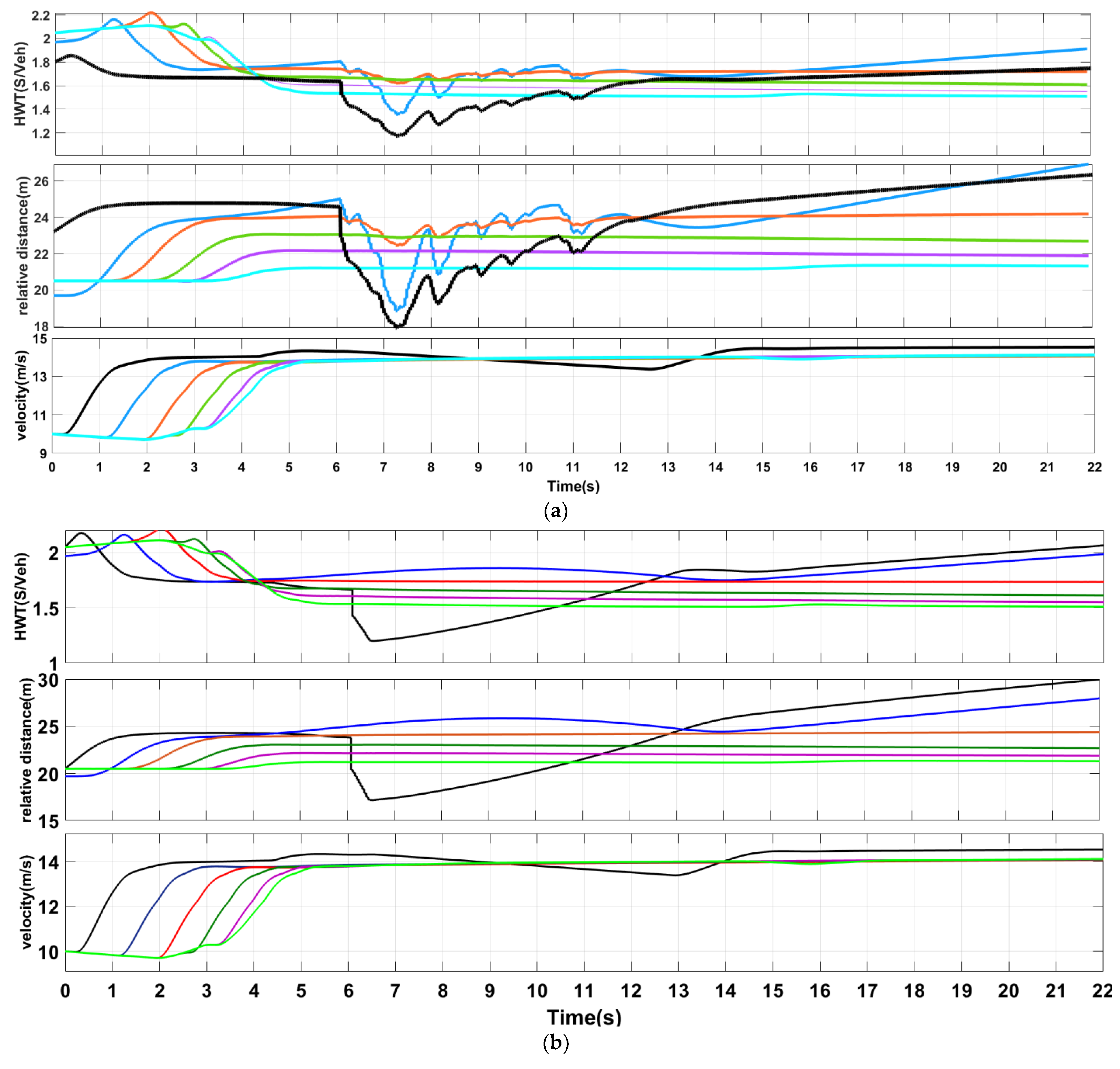
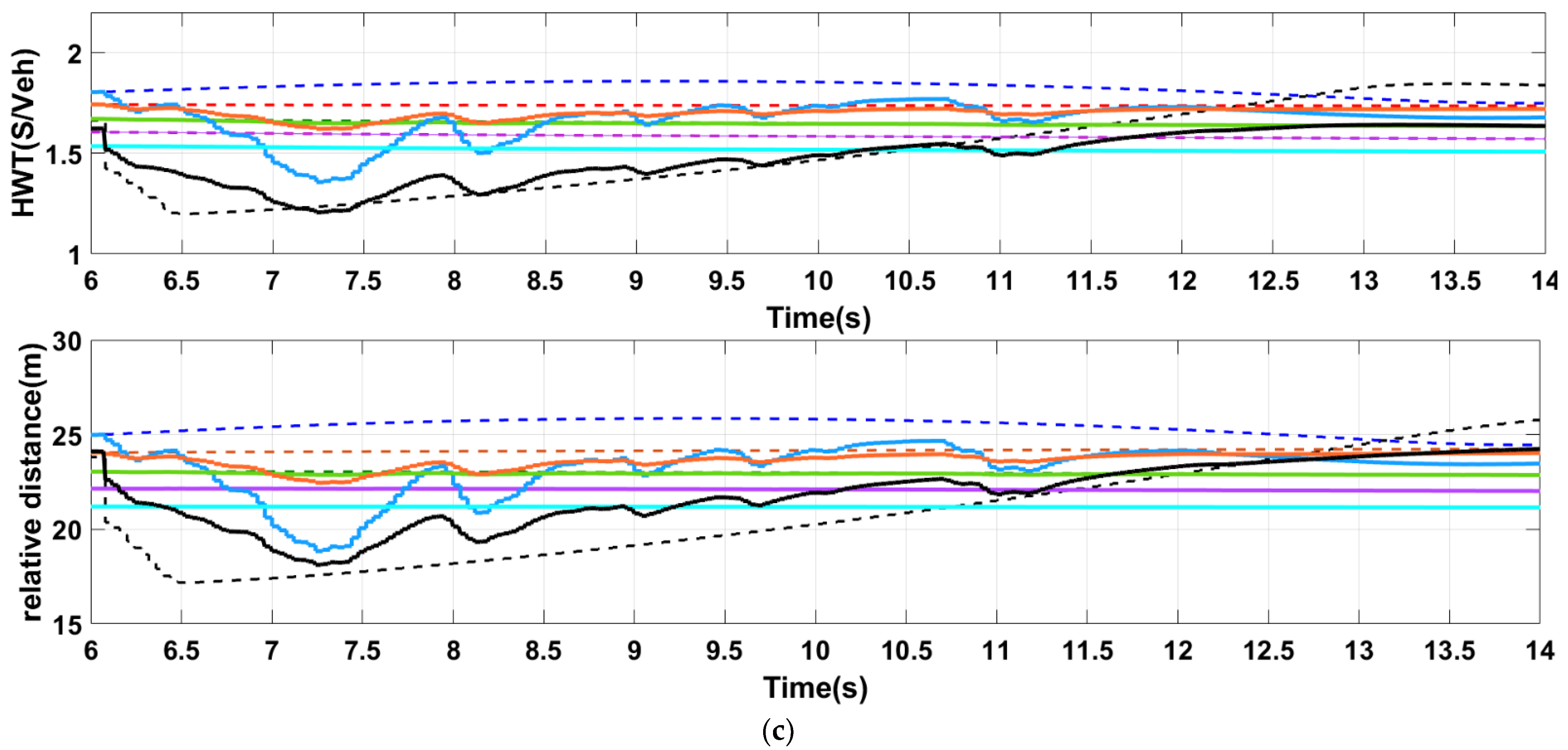
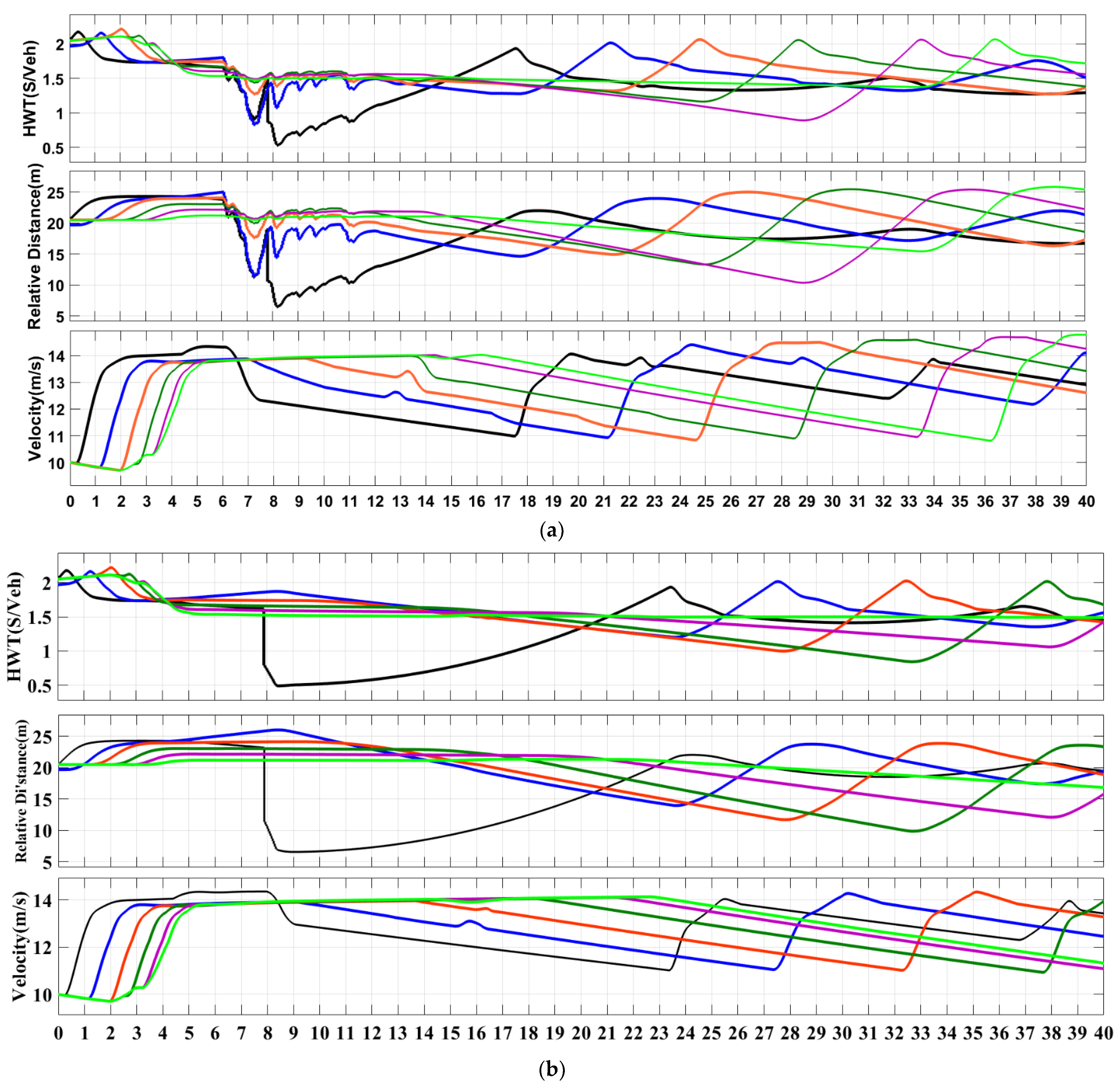
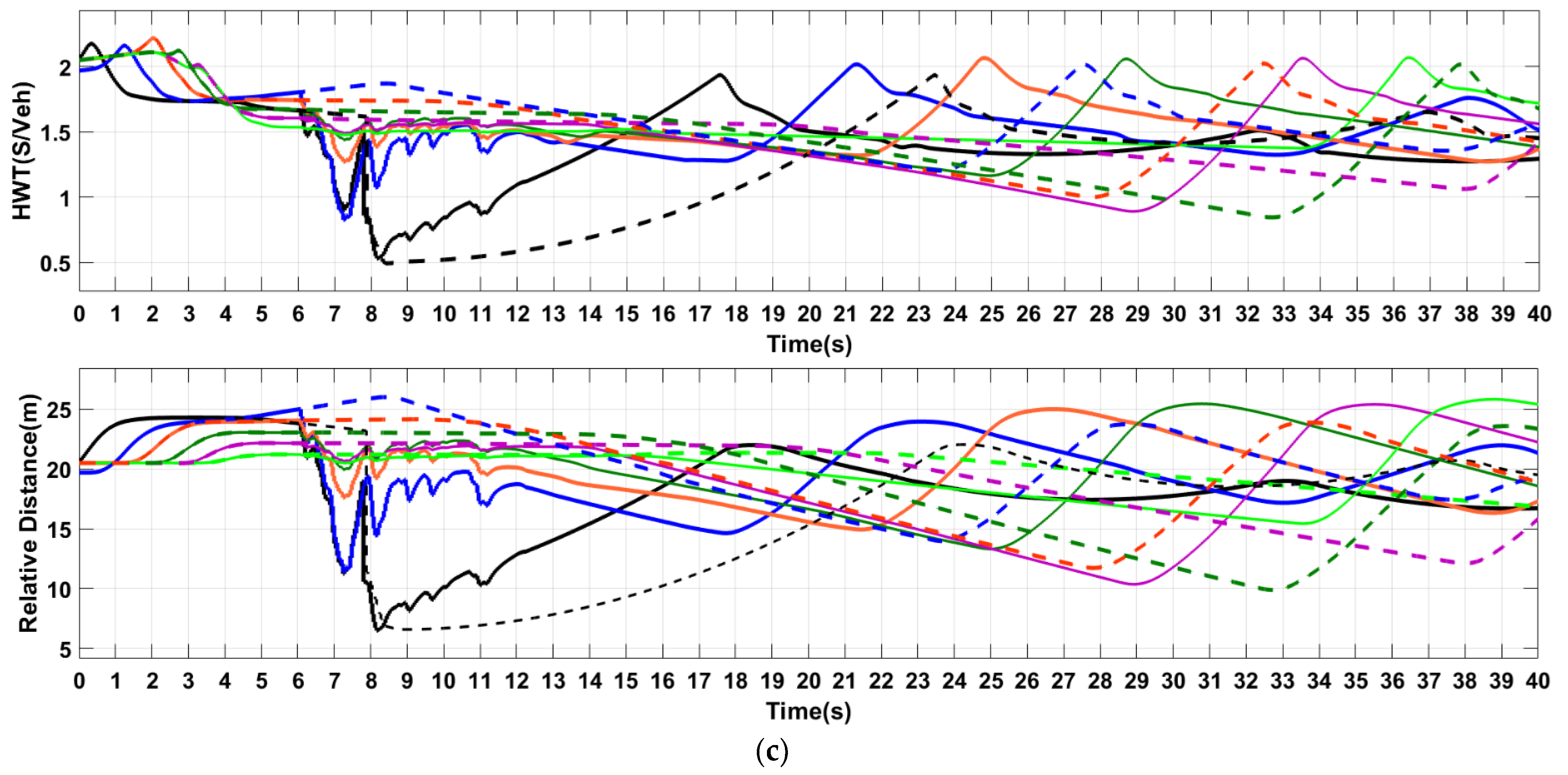
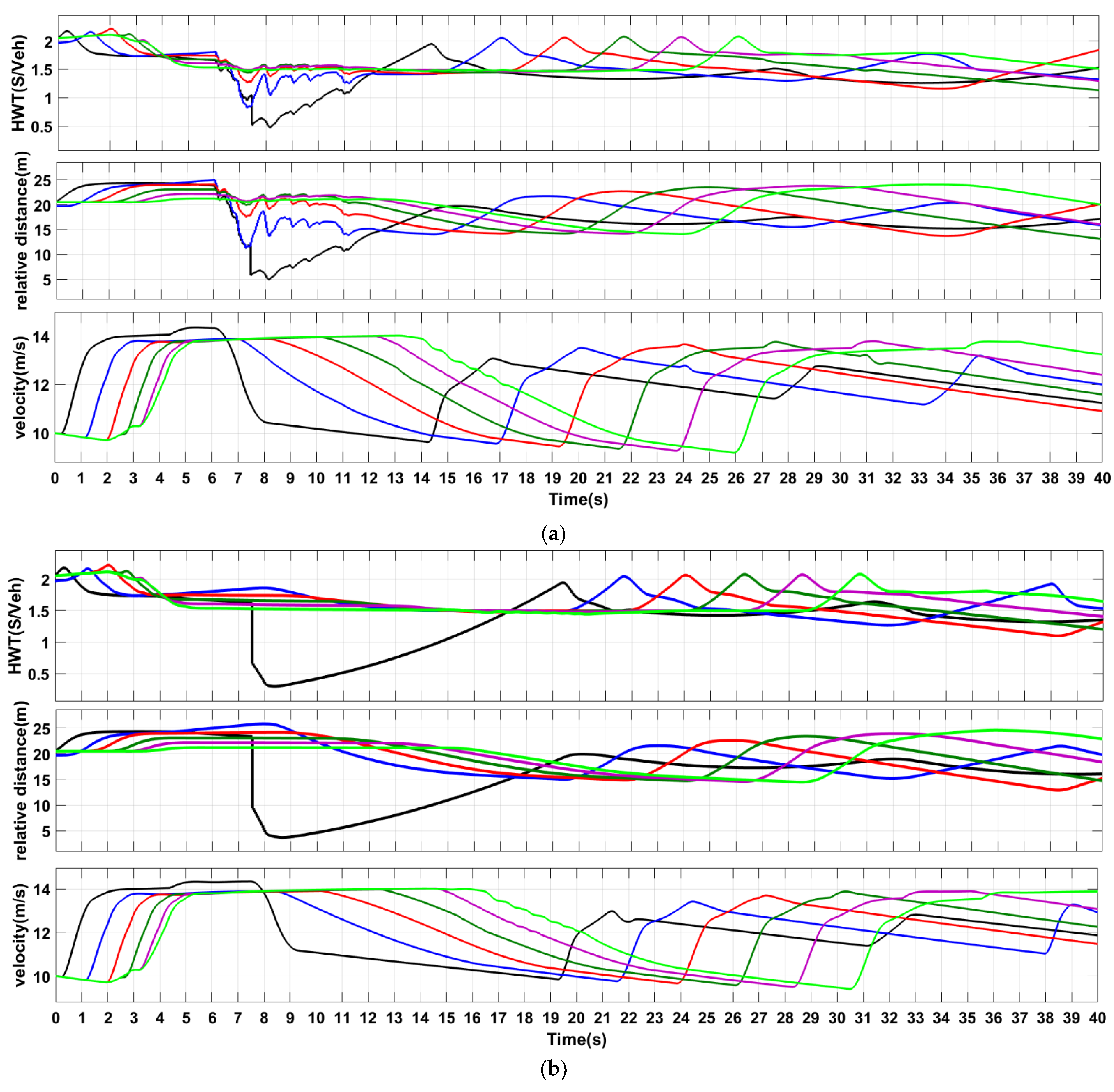
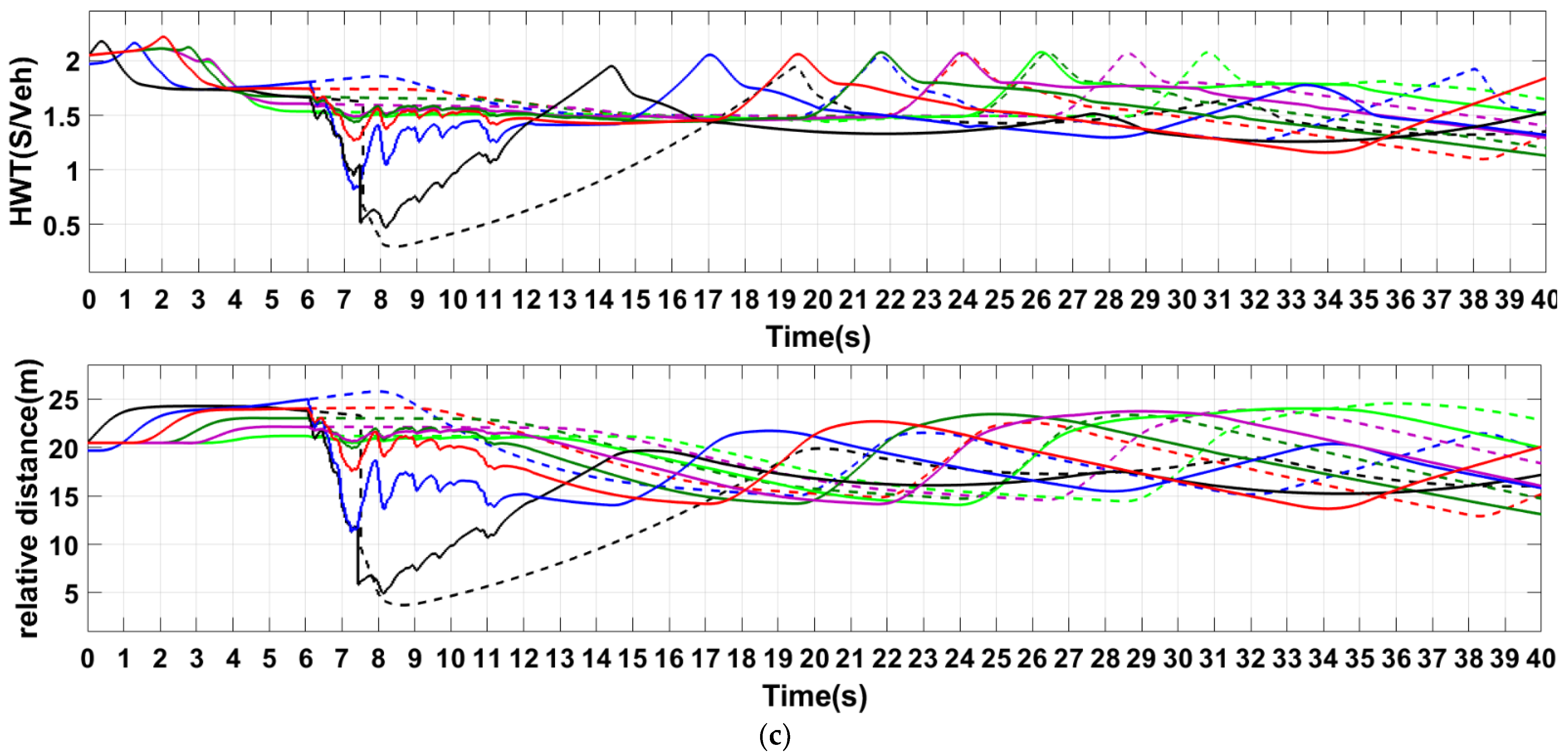
This subsection sets up the CACC algorithm with or without the flexible following factor and flexible attenuation factor optimization under four kinds of bypass lane insertion conditions, and the guiding vehicle in the four cases is set to run at a fixed speed. The initial speed of the rear vehicle is lower than the initial speed of the head vehicle; thus, there is more obvious acceleration following behavior in the initial stage, and this setting also corresponds to the actual real vehicle test. For the above four scenarios, this subsection configures five queue vehicles with CACC control for the overall test. This subsection mainly analyzes and compares the queues of the two types of fleets during the bypass vehicle cutover, and uses the following distance to assess the compactness of the two types of fleets, the headway time distance to assess the following safety, and the jerk to assess the comfort. For notational convenience, the fleet without flexible following factor and flexible decay factor is referred to as CACCNF in this paper (no factor CACC), and fleets with flexible following factor and flexible attenuation factor are CAVF (factor connected and automated vehicle).In the test effect picture, black, blue, coffee, dark green, purple and light green indicate the first car to the sixth car respectively. Also, in the results of the comparison between the two teams, the dashed line indicates the CACCNF team and the solid line indicates the CAVF team.
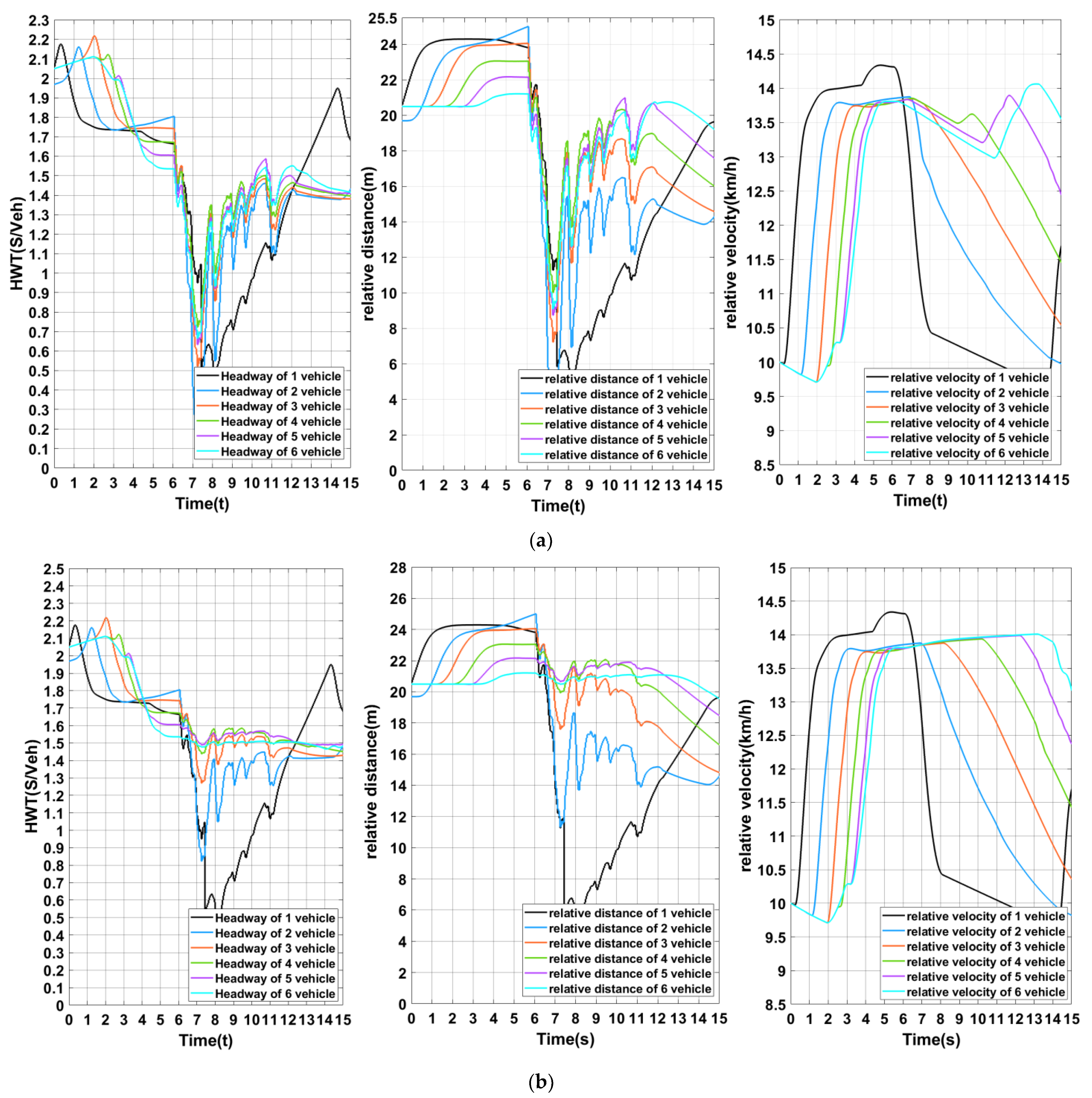
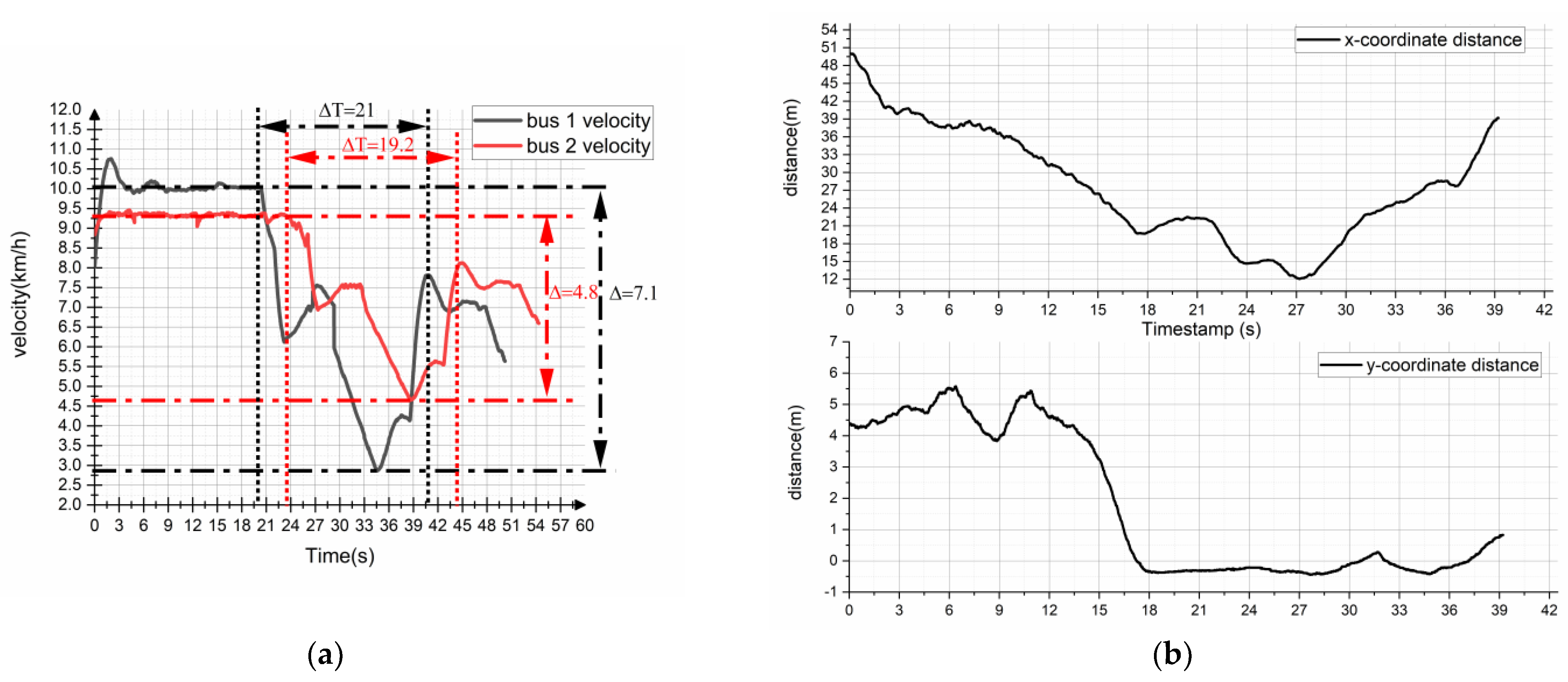
Scenario 1: The vehicle in the side lane cuts into this lane with a constant speed lower than the fleet travel speed of 2 m/s; as the vehicle speed in the side lane is lower than 2 m/s in this lane, i.e., the average speed is 7.2 km/h lower than that of the team train, this speed difference is large, and the limit following the working condition may occur for the train. Therefore, the goal of scenario 1 is to verify whether the algorithm proposed in this paper is safe. The simulation results of the two fleets are shown in
Figure 8. Due to the trajectory of the vehicles in the bypass lane being predicted in advance, the CAVF fleet adjusts its speed 3.5 s earlier.
The statistical analysis based on the simulation results of
Figure 8 is shown in
Table 1. The overall HWT regulation of the convoy is reduced by 65% on average, while the average reduction in the convoy following distance is 49.6%. Therefore, in scenario 1, the CAVF fleet has a smaller and more compact spacing, thereby ensuring safety.
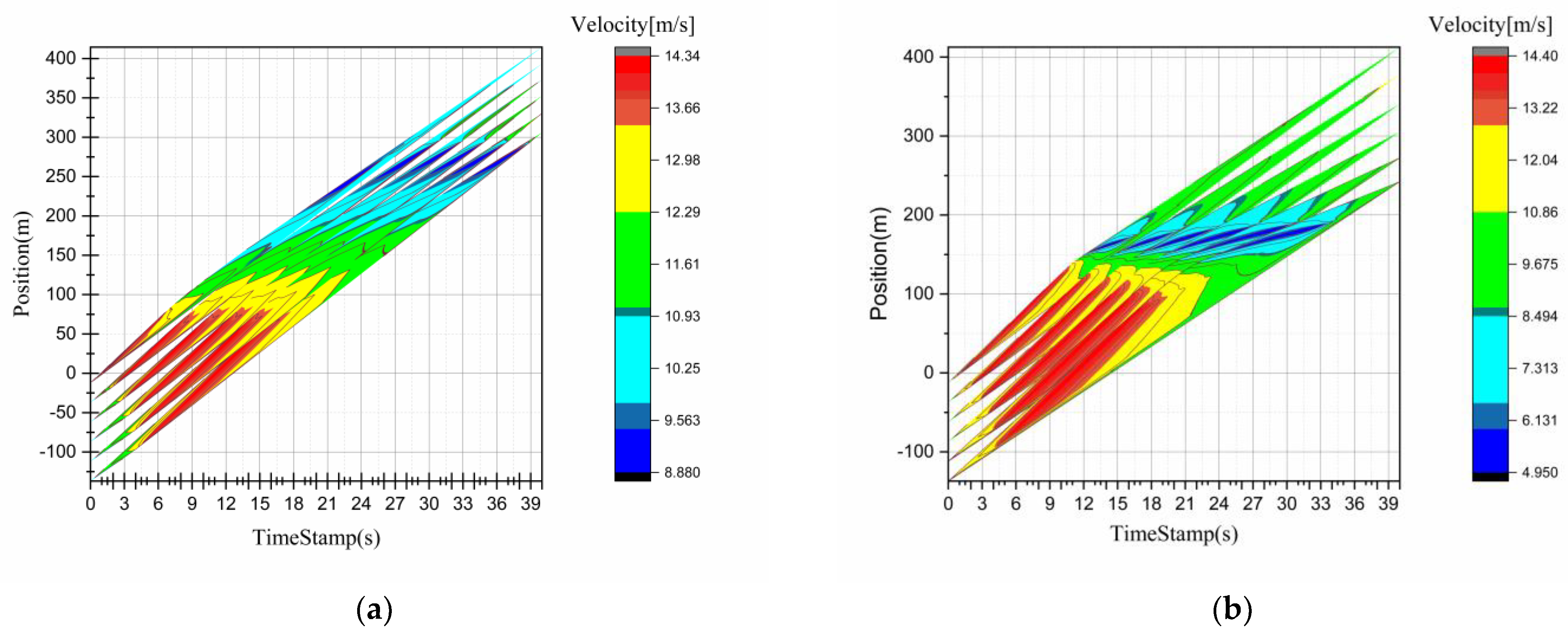
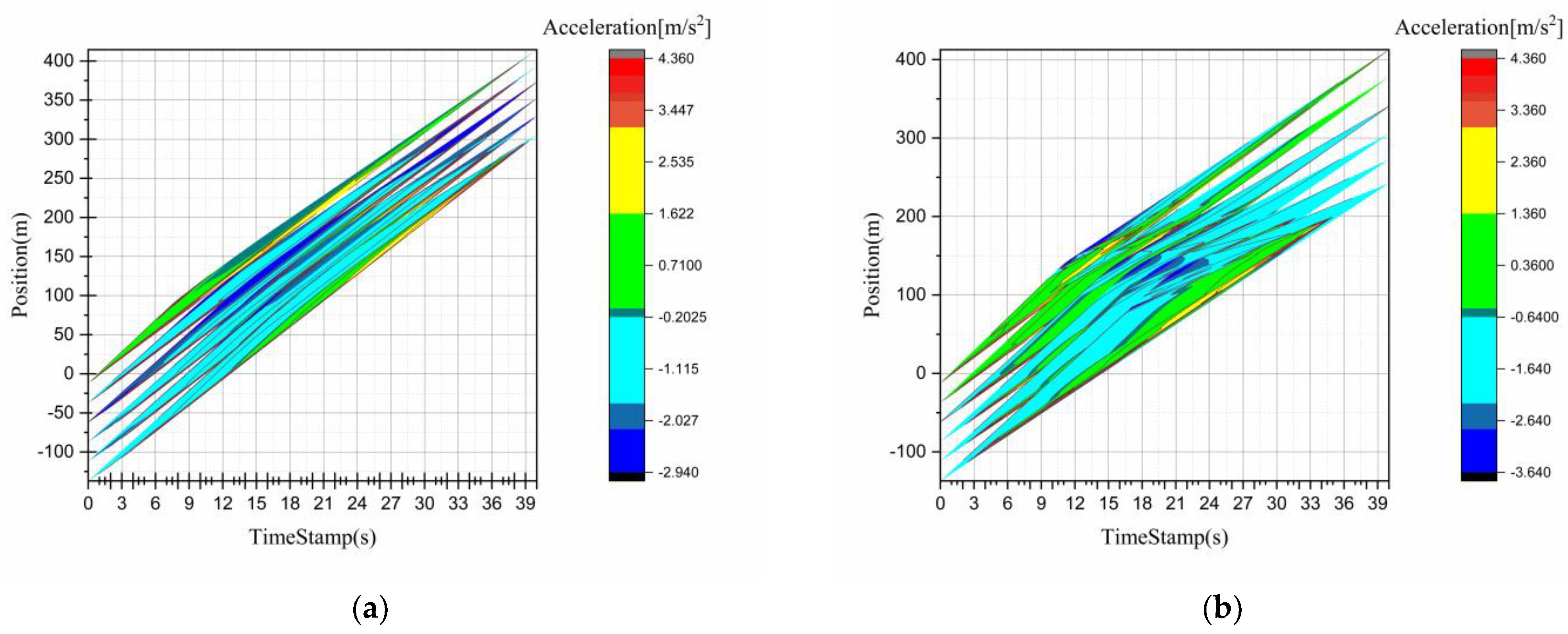
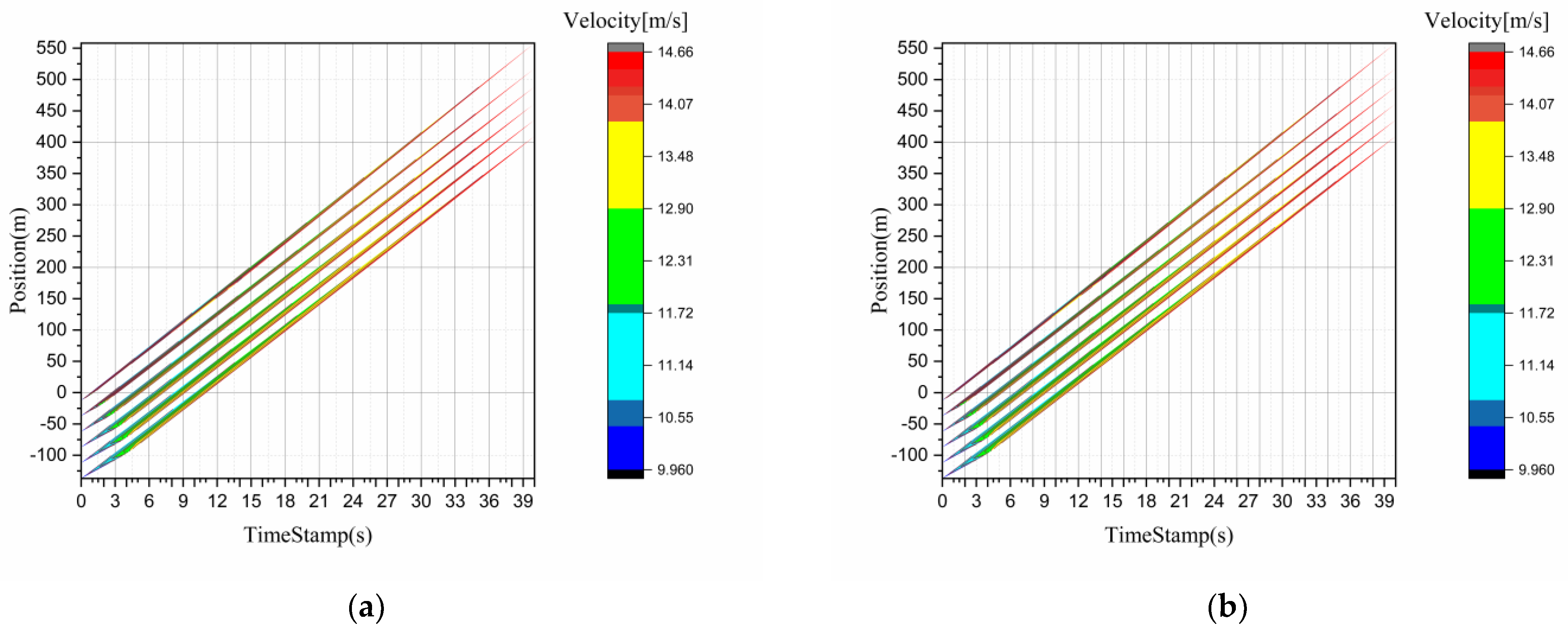
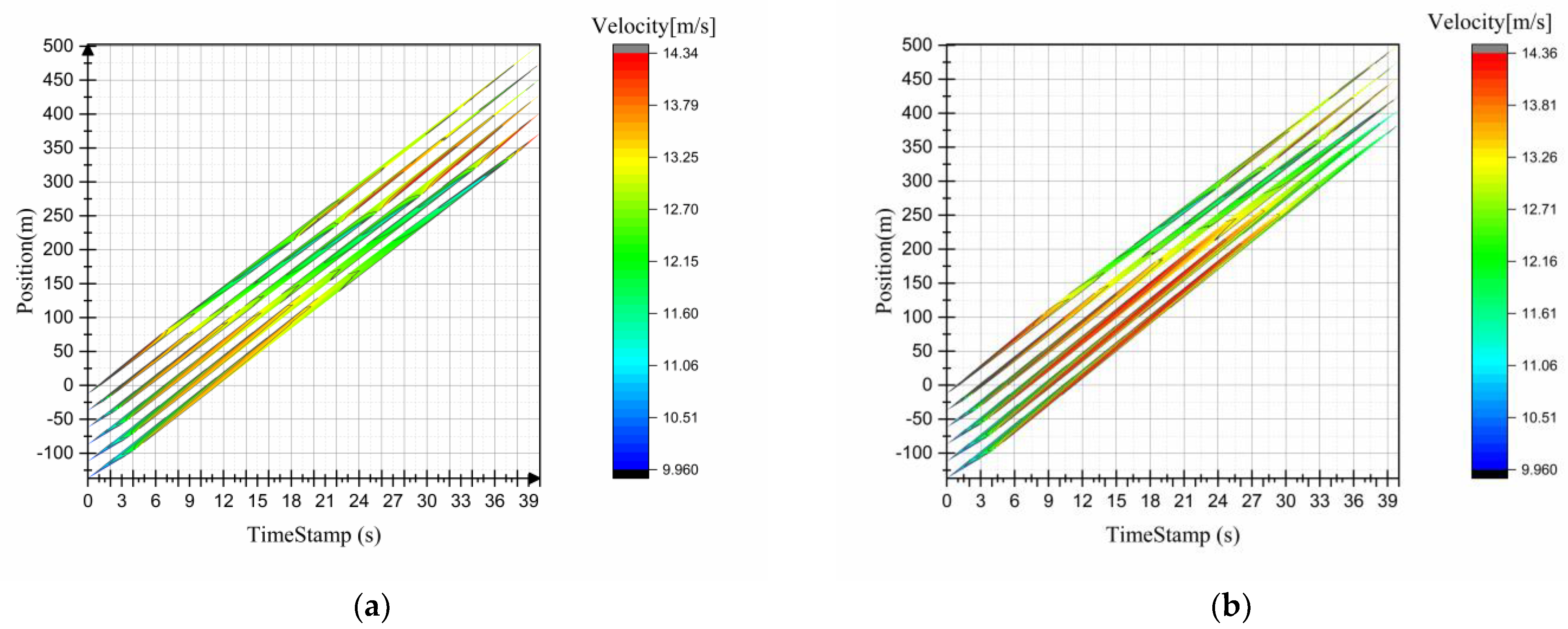
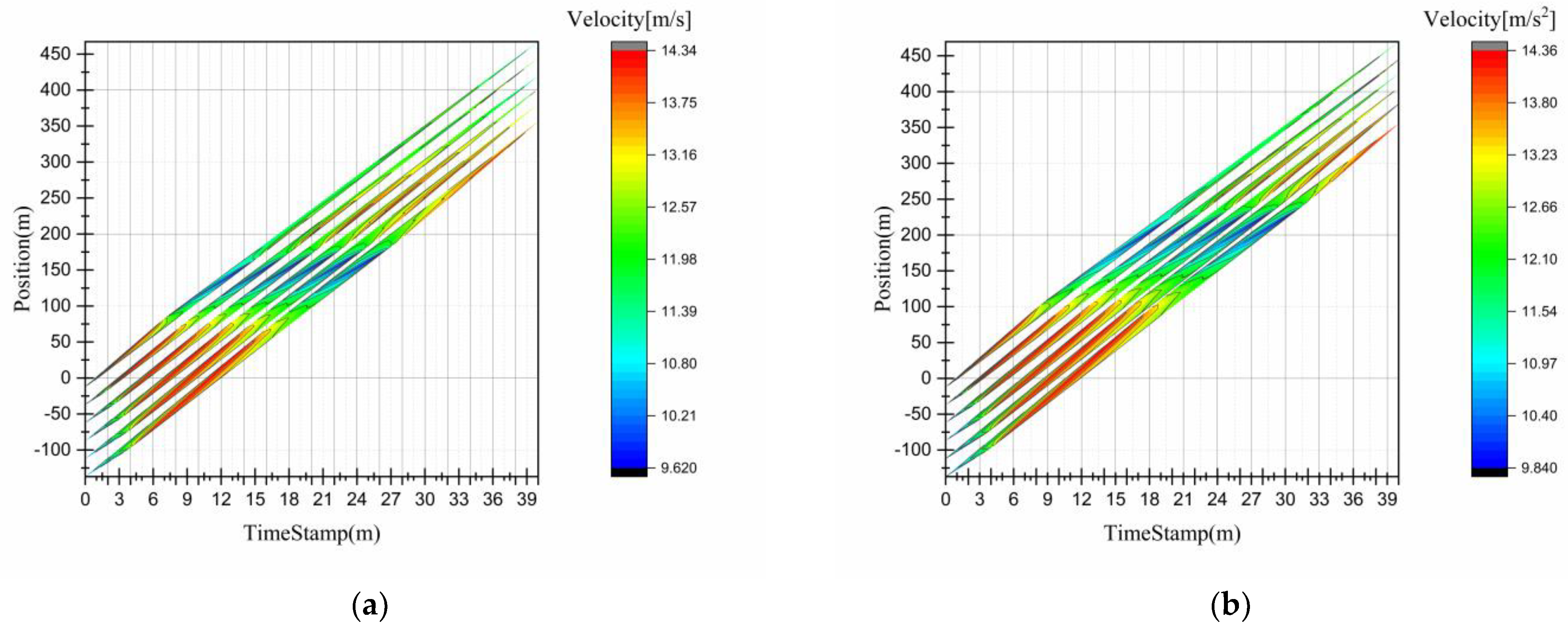
By plotting the velocity and acceleration heatmaps for each vehicle in the CAVF fleet and CACCNF fleet, with time on the horizontal axis and the position of the vehicle on the vertical axis, and by calculating the jerk, the comfort level of the vehicle can be evaluated. As shown in
Figure 9.
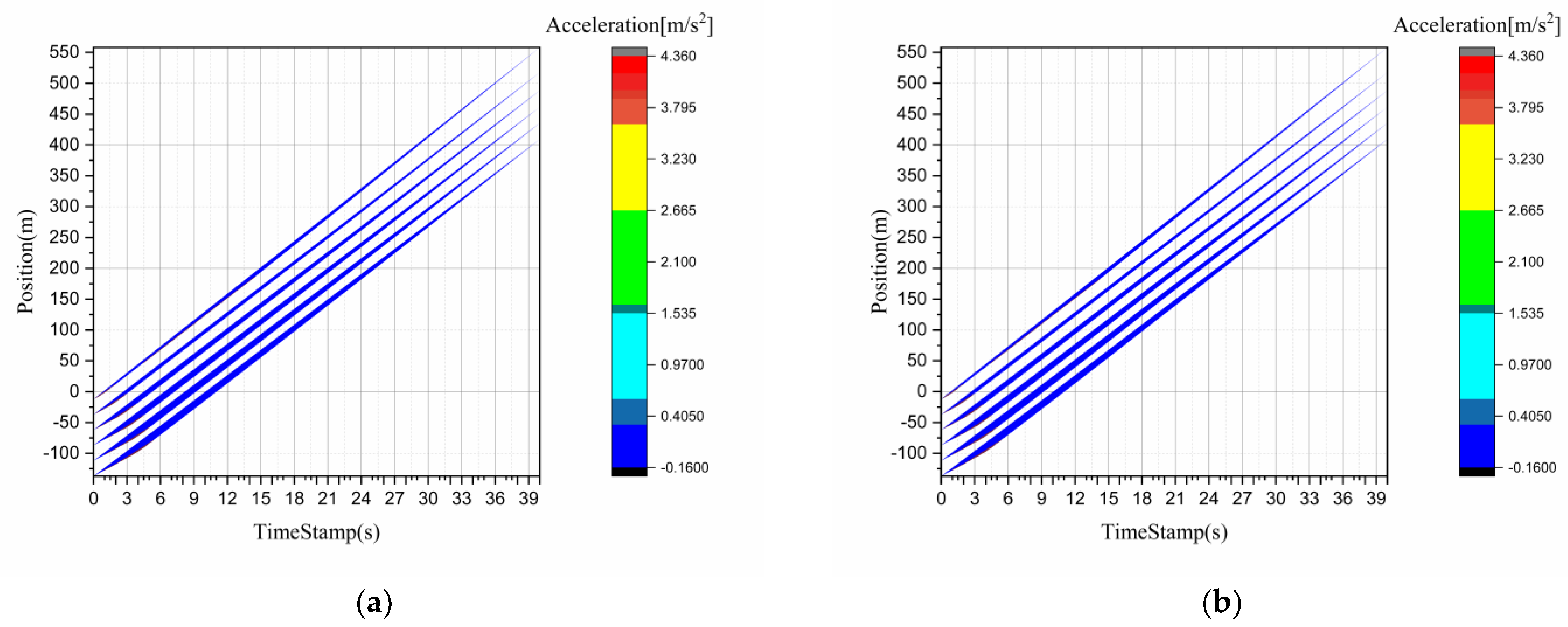
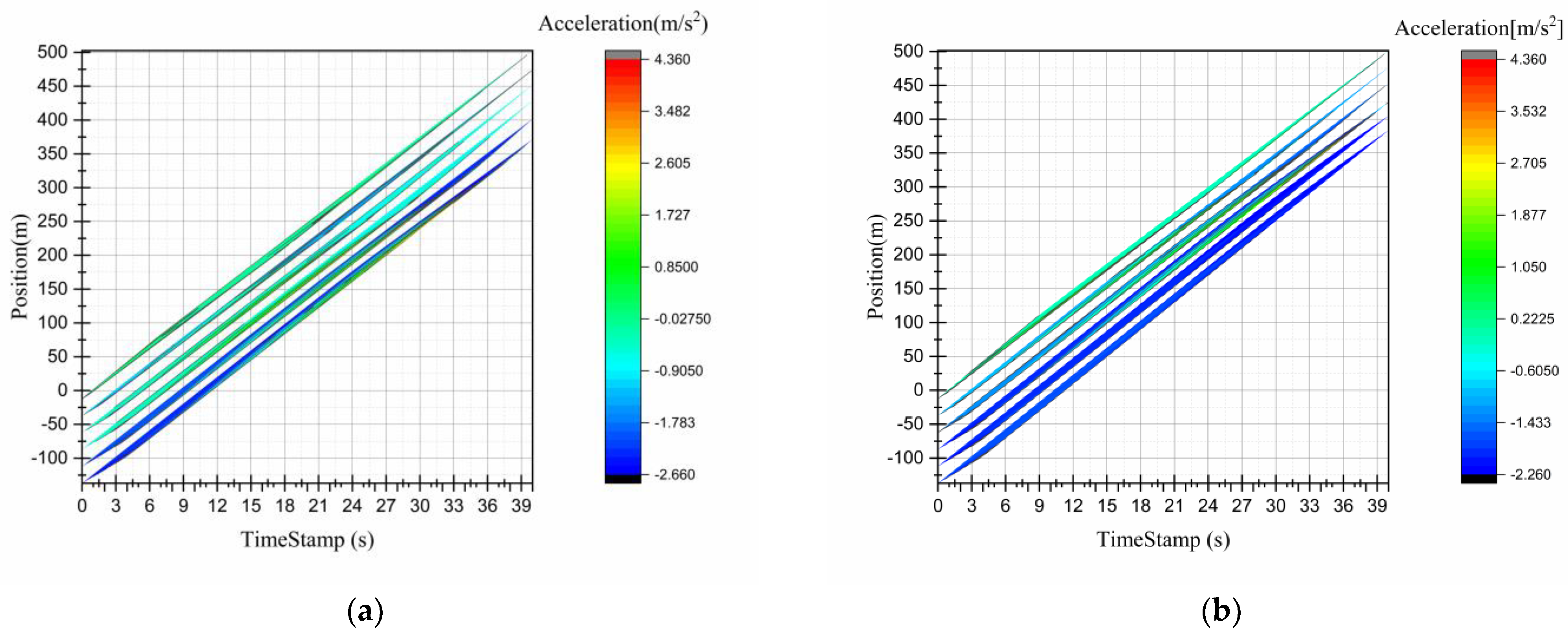
Based on the results shown in the figure, the following conclusions can be drawn: the acceleration changes in the CACCNF fleet are concentrated from 10 s to 35 s and the acceleration changes are more dispersed, while the acceleration changes of the CAVF fleet are concentrated from 5 to 20 s; after 25 s, the acceleration changes are more concentrated with a smaller change rate and higher comfort. As shown in
Figure 10.
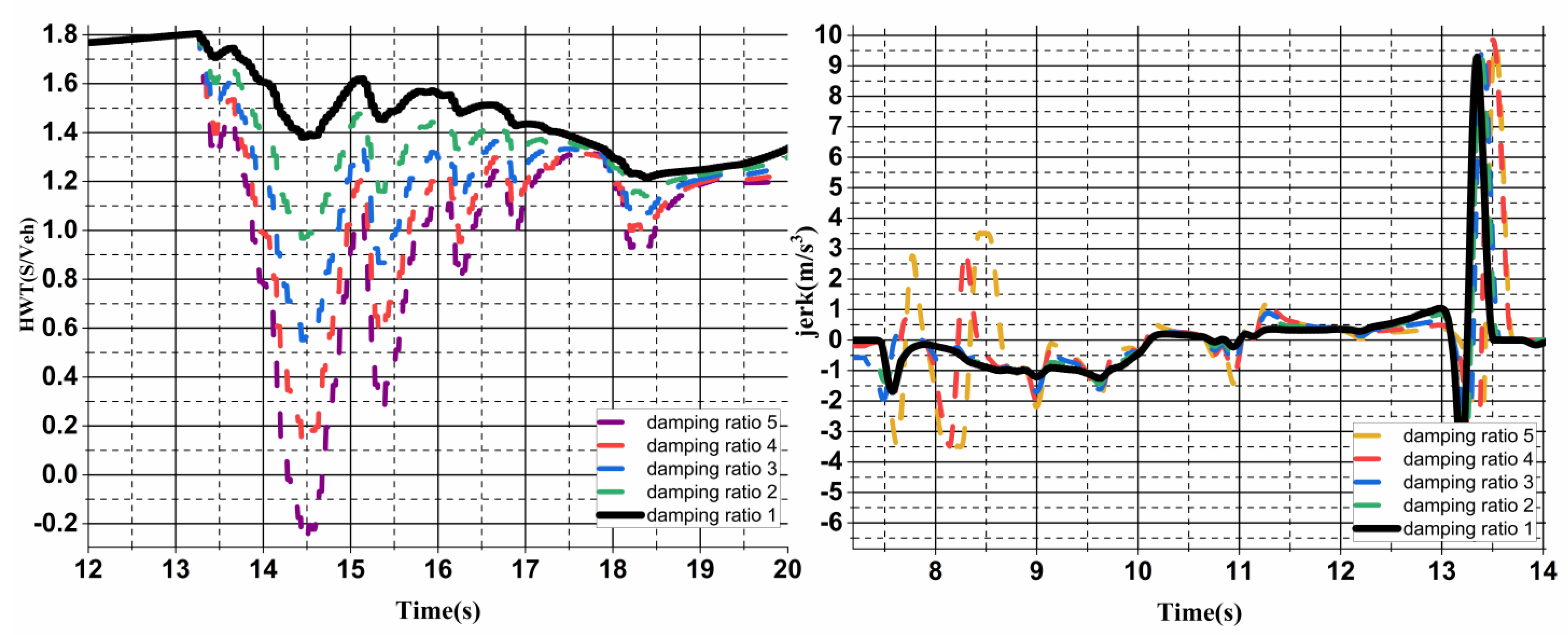
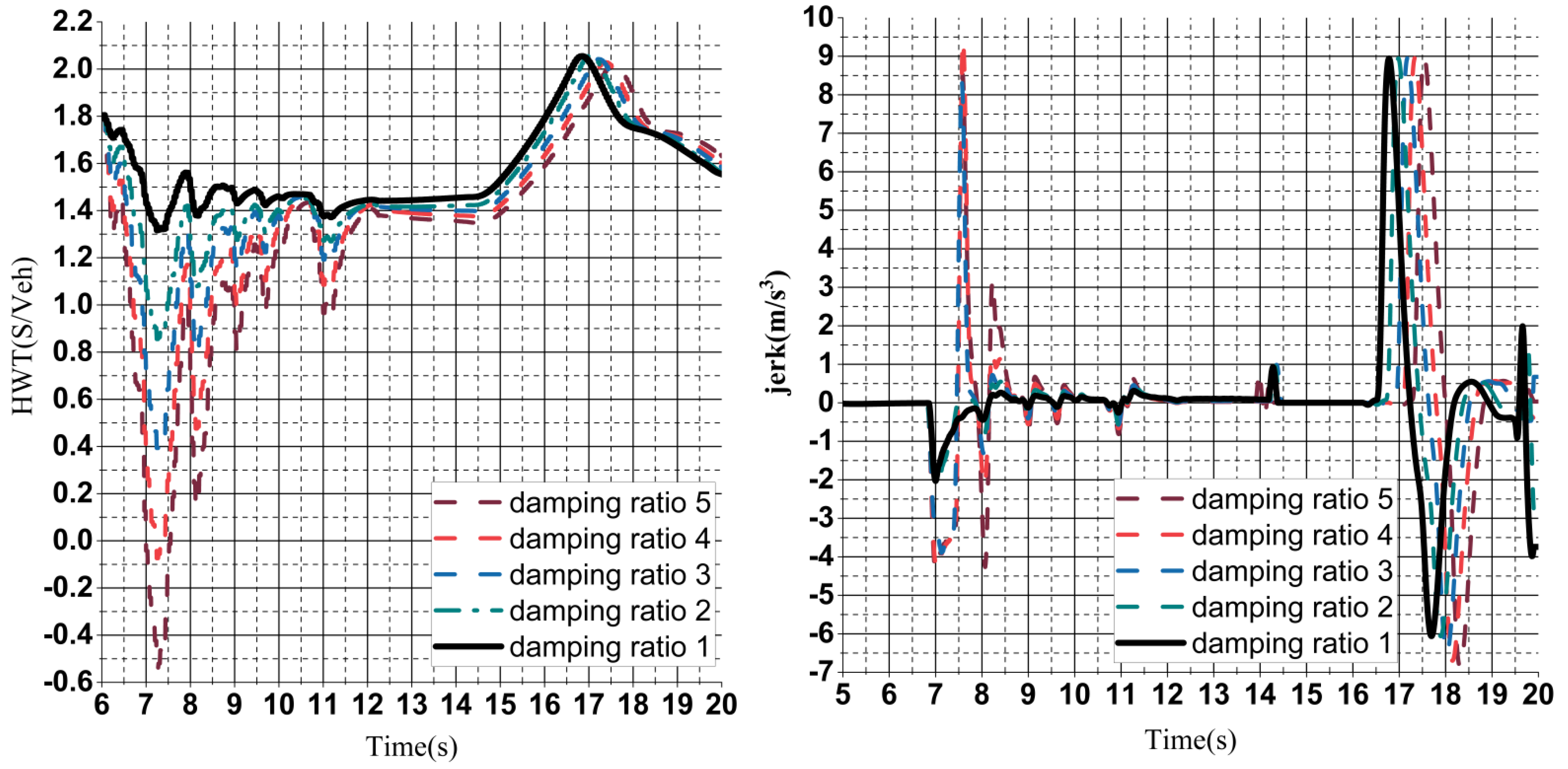
The average CACCNF fleet jerk is 54%, and the average CAVF fleet jerk is 48%, representing a 6% increase in comfort. The comfort increase is smaller due to the safety constraints, as shown in
Table 2.
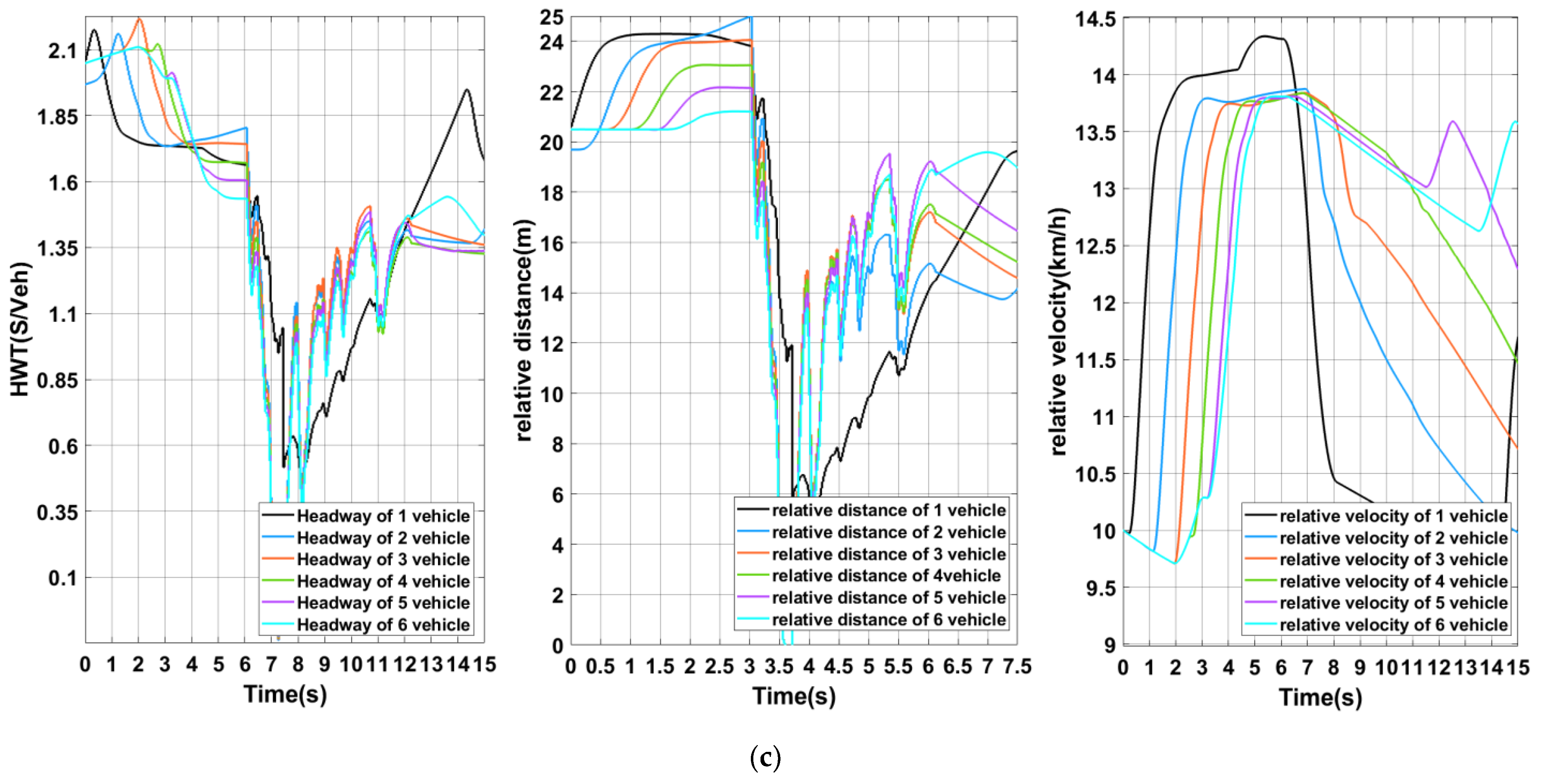
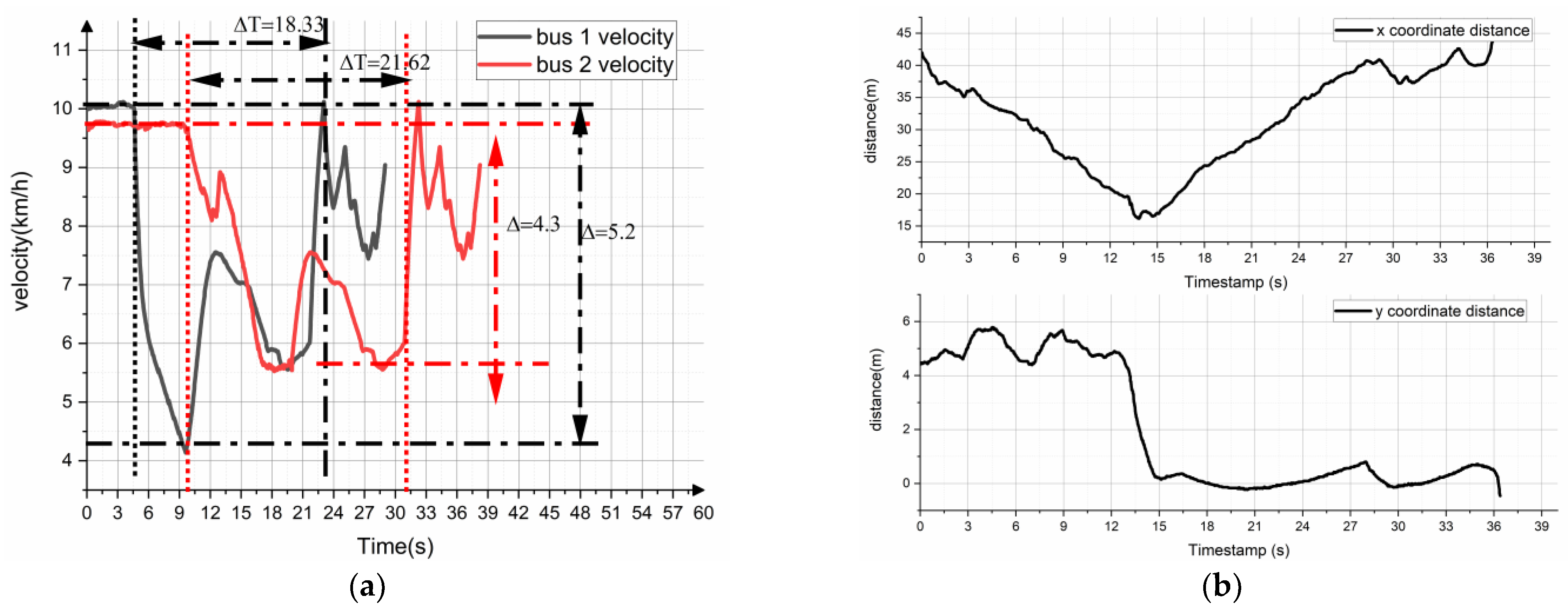
Scenario 2: The side lane vehicles cut into the lane at a higher speed than the fleet travel speed (constant at 2 m/s); because the side car speed insertion is higher than the team train speed (constant at 2 m/s), in the process of cutting in, due to the safety and comfort requirements, the train in the early stage suffers a certain degree of impact, before later converging to the team cruise speed, as shown in
Figure 11.
The statistical analysis based on the simulation results of
Figure 11 is shown in
Table 3. The overall HWT regulation of the convoy is reduced by 65% on average, Meanwhile, according to
Table 4, the average reduction in convoy following distance is 3.3%. Therefore, in scenario 1, the CAVF fleet has a smaller and more compact spacing, thereby ensuring safety.
By plotting the velocity and acceleration heatmaps for each vehicle of the CAVF fleet and CACCNF fleet, with time as the horizontal axis and the position of the vehicle as the vertical axis, and by calculating the jerk, the comfort level of the vehicle can be evaluated. From the results displayed in
Figure 12, it can be concluded that the speed of the CAVF fleet and CACCNF fleet varies more in the time domain of 5–15 s for CAVF, but the results also guarantee a tighter fleet in this scenario. As shown in
Figure 13, the acceleration distribution of this condition is not obvious; thus, this condition is not compared.
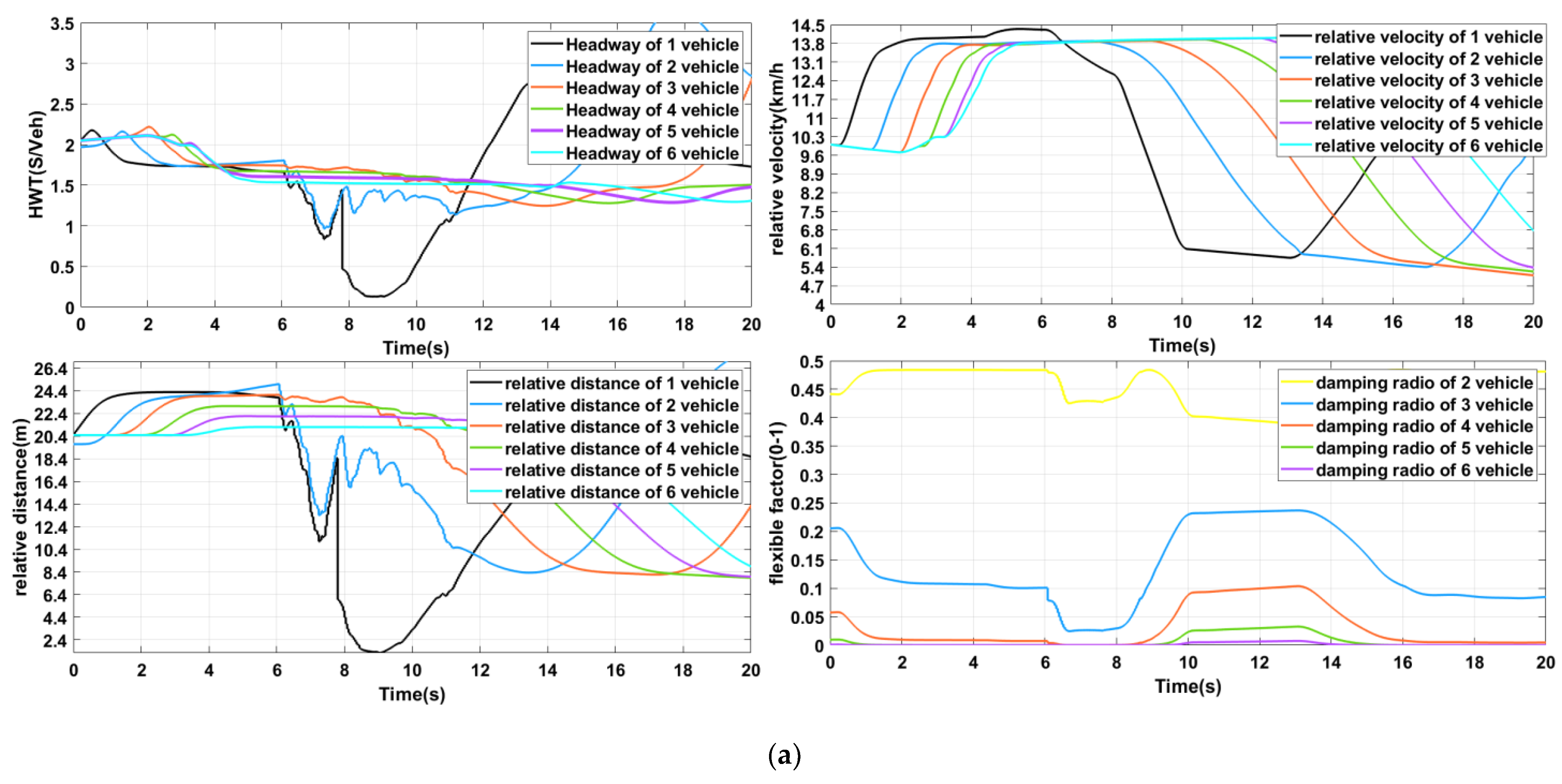
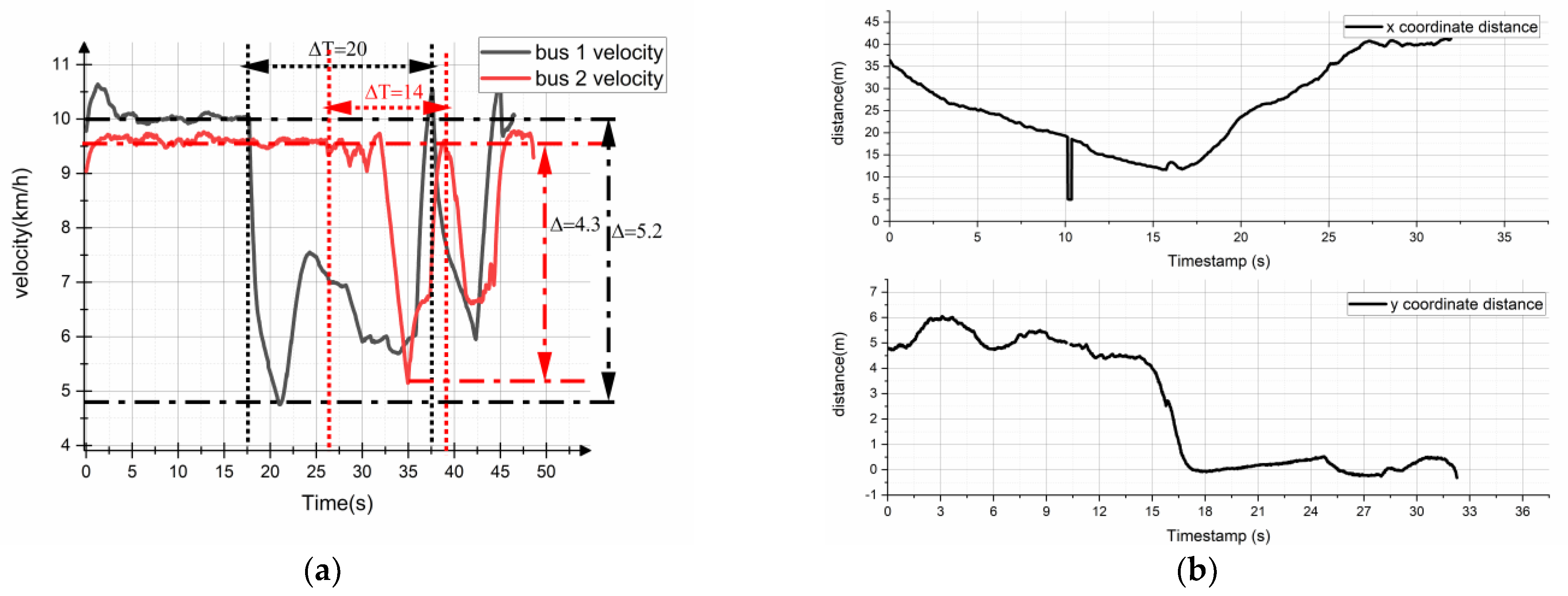
The side lane vehicle cuts into this lane, driving with a positive variable speed and an acceleration higher than the initial speed of the team train. As shown in
Figure 14, in the CACCNF fleet, because the side lane vehicle accelerates into this lane and the speed is higher than the speed of the team train, the traffic oscillation changes gradually from the head vehicle to the tail vehicle, and the deceleration process of the head vehicle, as well as the speed change process, is longer, which leads to the back vehicles undergoing real-time speed changes to protect the stability of the vehicle. The time domain of speed change of the CAVF fleet is reduced by 2 s, and the fleet stability is reached more quickly.
The statistical analysis based on the simulation results of
Figure 14 is shown in
Table 5. The HWT adjustment time of the two types of queues reveals that the adjustment time of the CAVF fleet is shorter compared to that of the CACCNF fleet by about 4 s, and the results of the following distance shown in the above figure indicate that the following distance of the CAVF fleet is lower and the spacing is smaller.
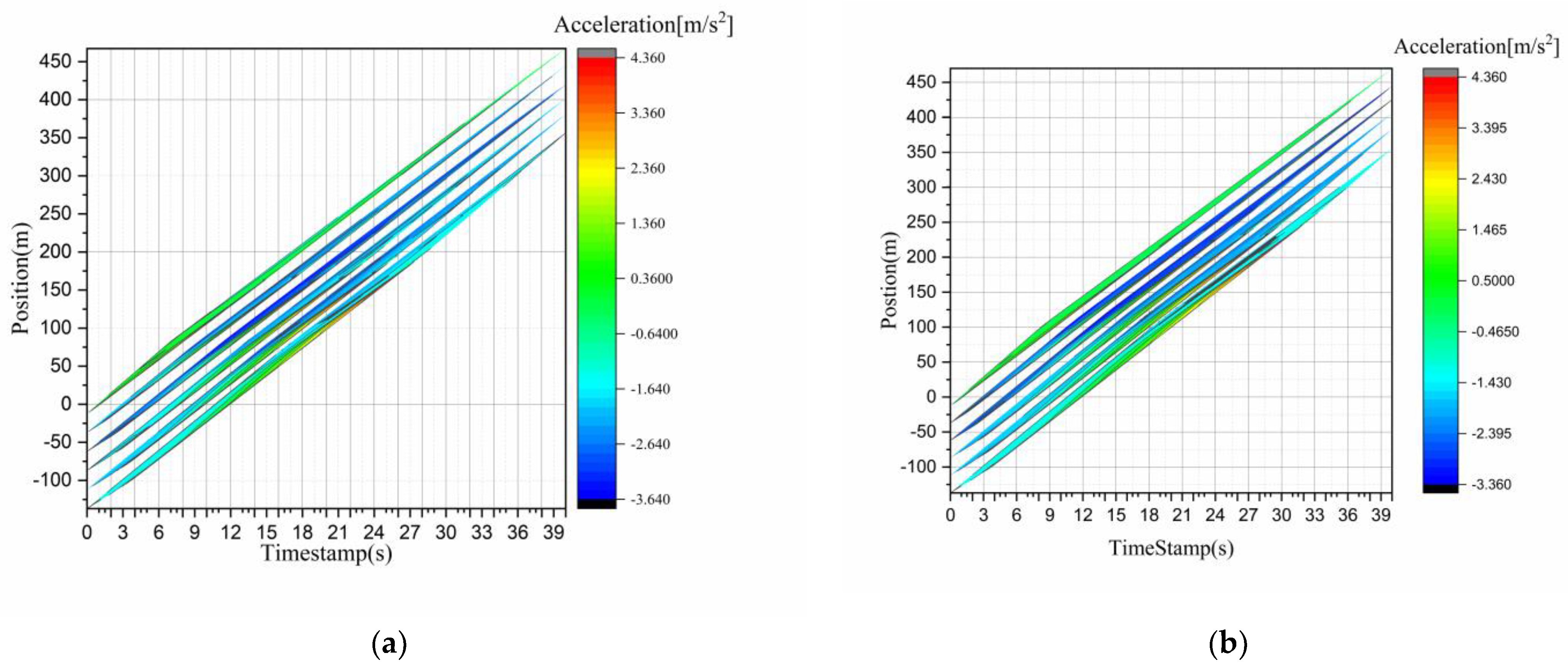
As shown below, the heatmaps of velocity and acceleration for each vehicle of the CAVF fleet and CACCNF fleet are plotted separately, with time as the horizontal axis and the position of the vehicle as the vertical axis. From the results shown in
Figure 15 and
Figure 16, it can be concluded that the velocity density of the CAVF fleet is concentrated in the range of 5–16 s, and the velocity density of the CACCNF fleet is concentrated in the range of 10–26 s. The velocity oscillation time of the CACCNF fleet is longer and the velocity fluctuation is higher compared with the CAVF fleet. Under this condition, the average fluctuation of both fleets is basically the same.
From the results shown in
Figure 17, it can be concluded that the acceleration changes in the CACCNF team are concentrated between 10 and 35 s, whereas the acceleration changes in the CAVF team are concentrated between 5 and 20 s; after 25 s, the acceleration changes become more concentrated and the change rate is smaller. As shown in
Table 6, the mean jerk value of the CACCNF team is 62.8%, while that of the CAVF team is 53.9%, representing an 8.9% improvement in comfort level.
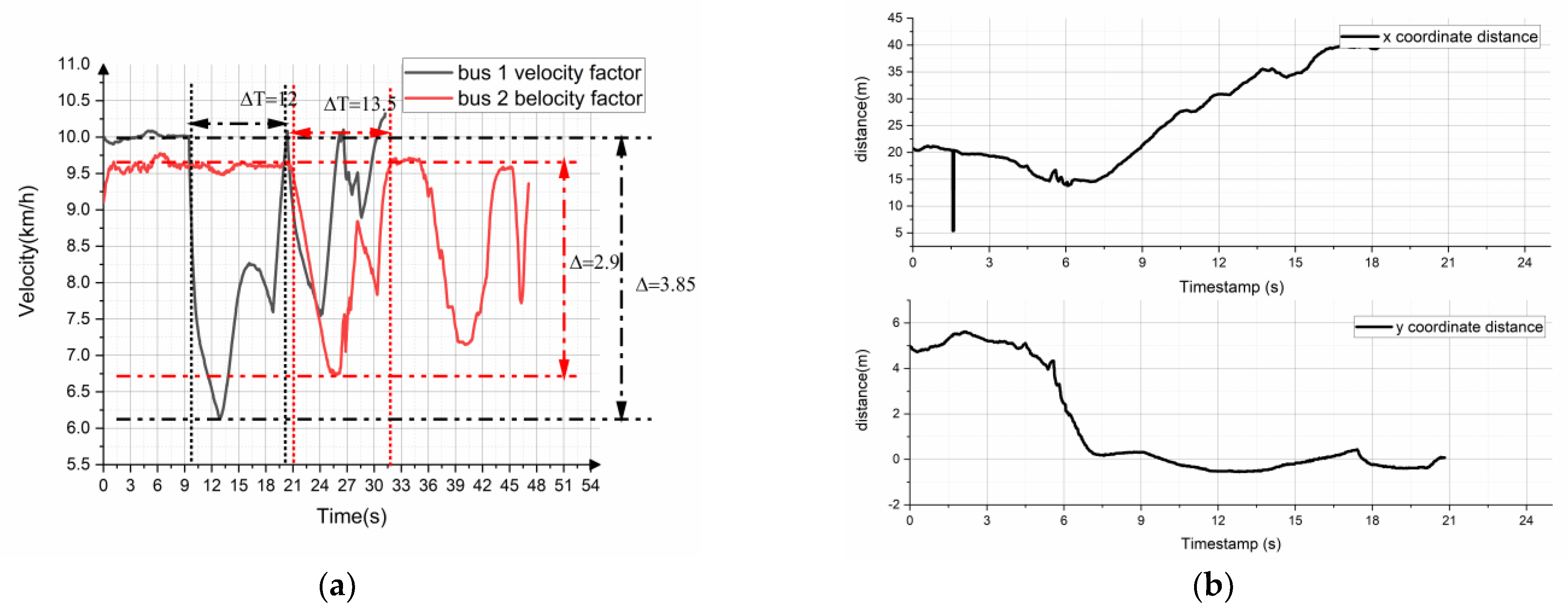
Scenario 4: The vehicle in the side lane cuts into the lane with a negative acceleration higher than the initial speed of the team train, as shown in
Figure 17.
The statistical analysis based on the simulation results of
Figure 17 is shown in
Table 7. The regulation of the overall HWT of the fleet is reduced by 13% on average. The regulation rate of the fleet following distance is reduced by 6% on average. The results according to the figure show that the following distance of the CAVF fleet is lower, and the spacing is smaller.
As shown in the figures below, with time as the horizontal axis and the position of the vehicles as the vertical axis, the heatmaps of the velocity and acceleration of each vehicle of the CAVF fleet and the CACCNF fleet are plotted separately.
Figure 18 shows that the high-speed density of the CAVF fleet is concentrated within 0–16 s, and the high-speed density of the CACCNF fleet is concentrated within 0–20 s. The velocity fluctuation time of the CACCNF fleet is higher compared to the CAVF fleet, while the speed fluctuation time of the CAVF fleet is longer and the speed fluctuation rate is higher. From the results shown in
Figure 19, it can be concluded that the acceleration changes in the CACCNF fleet are concentrated between 10 and 35 s, and the acceleration changes are more dispersed, while the acceleration changes in the CAVF fleet are concentrated between 5 and 20 s; after 25 s, the acceleration changes are more concentrated.
As shown in
Table 8, the average CACCNF team jerk is 88% and the average CAVF team jerk is 74.5%, representing a 13.5% increase in comfort.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}