1. Introduction
Climate change and energy transition require reformulating the management of the available ecological resources to ensure the viability of our planet. Two factors need to be analysed in this regard: energy consumption and the emission of polluting gasses. As a consequence of this critical scenario, green-energy generation and electrical mobility based on electric drives have been promoted in the last decade. However, to satisfy their new role in society, they require even more progress in their performance. Multiphase systems appear as an interesting alternative to fulfill the more restrictive requirements of the new generation of electric drives. These special electrical systems offer several substantial advantages in comparison with conventional three-phase electric drives, such as a smaller torque ripple [
1], a better fault tolerance [
2] and a lower per-phase current rating for the same phase voltage [
3]. As a consequence of these suitable features, several research groups are focused on the improvement of the multiphase machine design, using for that purpose modern optimisation techniques [
4,
5,
6]. On the other hand, high-performance control techniques are also required to exploit the benefits of multiphase electric drives [
1,
2,
3,
7]. Given the number of industry applications where a variable speed system is regulated, for example, electrical vehicles, a suitable dynamic response can be considered as a principal requirement for a high-performance control scheme.
Considering the current state-of-the-art, classical linear controllers, such as indirect rotor field-oriented control (IRFOC) schemes, have been selected as one of the most preferable control solutions for multiphase electric drives [
8]. This family of regulation techniques provides a low harmonic distortion and a robust tracking of the control variables [
8]. Reduced harmonic content is typically achieved with the implementation of an explicit modulation stage, whereas the usage of proportional-integral controllers permits solving some disturbance problems. In spite of the popularity of IRFOC strategies, some limitations have also been identified concerning their performance, including a reduced utilisation of the DC-link voltage and a limited flexibility in terms of creating online control actions, when the classical versions of the explicit modulation stages are employed. However, some of these limitations have been solved with the development of new proposals that replace those standard modulation strategies at the expense of a higher computational burden and complexity [
9]. The improvement in the DC-link voltage usage is typically addressed with the injection of a specific harmonic content according to the operating point [
10,
11,
12,
13]. This solution was developed for conventional pulse-width modulation techniques employed in multiphase systems. Direct control techniques are considered an interesting alternative to linear controllers in multiphase electric drives. In this regard, finite-control-set model predictive control (FCS-MPC) appeared in 2009 [
14], providing a proof of concept concerning the advantages of FCS-MPC in the field of multiphase systems. Its conceptual simplicity and flexibility have been highly appreciated by the research community. Nevertheless, a reduced current quality limited the viability of FCS-MPC as a high-performance control technique for a significant period of time. An additional benefit of FCS-MPC usage is its suitable dynamic response; this feature is crucial in industrial applications such as electric vehicles, more-electric aircraft or aerospace systems.
There is a substantial number of works about three-phase electric drives where a comparative analysis concerning the dynamic abilities of IRFOC and FCS-MPC was carried out [
15,
16,
17,
18,
19,
20,
21,
22]. These studies were conducted from qualitative [
19,
20] and quantitative perspectives [
15,
16,
17,
18,
21,
22]. Concerning the first type of analysis [
19,
20], the dynamic performance assessment was approached in terms of current response. In the case of [
20], the conclusions are based on simulation results where the current of the main plane was employed as the basis of the proposed comparison. The implemented control schemes in this work were FCS-MPC and IRFOC using a carrier-based pulse-width modulation (CB-PWM) stage. According to the qualitative results, a better FCS-MPC dynamic response is obtained because the conventional CB-PWM cannot achieve a unitary modulation index and thanks to the use of a large predictive horizon in the case of FCS-MPC. Ref. [
19] employed numerical simulations and experimental results to analyse from a qualitative point of view the capacity of these regulation techniques to satisfy a transient situation. The work also focused on the current response since an
load was employed and therefore the transient speed behavior was omitted in [
19]. Concerning the quantitative studies [
15,
17,
18,
19,
20], the use of an explicit modulation stage was identified as a significant limiting factor of the dynamic response of IRFOC [
16,
17,
18,
21]. However, the impact of the modulation stage on the dynamic performance and the analysis of causality is addressed from different perspectives. In [
17], the reduced utilisation of the DC-link voltage is exposed as the limiting factor, whereas in [
18,
21] the delay added in the current response due to the implementation of a space-vector pulse-width modulation (SV-PWM) is identified as the cause of this poor performance. In addition, ref. [
16] highlighted the low band-width of the modulation stages as the influencing factor in the dynamic behavior of linear controllers. On the other hand, ref. [
15] introduced the limited dynamic ability of control schemes based on a cascade structure as a main cause of the transient misperformance. Nevertheless, the speed tracking of electric drives ensures a cascade strategy for IRFOC and FCS-MPC techniques; therefore, this issue cannot be strictly considered as a source of divergence. Regardless of the nature of the analysis, the speed response is typically omitted as a consequence of the use of
load [
17,
19,
20,
21] instead of an electric machine. Therefore, the influence of the control scheme on the mechanical speed response could not be established. In order to solve this issue, ref. [
22] proposed a comparative analysis of speed regulation in transient situations using IRFOC and FCS-MPC. However, only simulation results were employed to provide the conclusions.
Considering the increase in the use of multiphase technology for variable-speed electric drives and the limitations of previous studies concerning three-phase systems, this work proposes for the first time a comparative analysis of the dynamic performance of conventional IRFOC without a specific harmonic injection and FCS-MPC in multiphase drives. Its main objective is to provide consistent conclusions concerning speed, current and voltage behavior in transient scenarios. For that purpose, a six-phase electric drive is employed as a case study. Experimental results are employed to validate the analytical approaches provided concerning the reaction time and response capacity of the considered control schemes. In this regard, three different regulation techniques were implemented: IRFOC CB-PWM, IRFOC SV-PWM and FCS-MPC using large voltage vectors as active control actions. The main factors that influence the dynamic performance are explored from analytical and experimental perspectives. For instance, the impact of DC-link voltage utilisation and the integral terms of the linear controllers are analysed. On the other hand, as a consequence of the lower switching frequency of FCS-MPC strategies [
14], it is common to implement this control technique using a higher sampling frequency than in IRFOC [
23]. This assumption is necessary to achieve a fair comparison in a steady state; however, it can also omit some significant information about the transient response of the studied regulation techniques. For this reason and in contrast to previous studies, this work considers this implementation variable as an influencing factor in the dynamic behavior of these popular control schemes. It is worth highlighting that the conclusions from this analysis are valid for electric drives using multiphase induction machines and conventional Si-based voltage source converters (VSCs) at standard switching frequencies (between 1 and 10 kHz). The advent of wideband-gap devices (e.g., SiC and GaN switches) could promote a review of the obtained conclusions, but this technology is still in an initial stage of development in the field multiphase electric drives.
The rest of the manuscript is structured as follows.
Section 2 describes the selected topology for the proposed case study. In
Section 3, IRFOC and FCS-MPC are presented, as well as the considered explicit modulation techniques.
Section 4 provides a detailed insight concerning the variable related to reaction time and response capacity of the different control schemes. Finally,
Section 5 and
Section 6 present the experimental results and the main conclusions of this work, respectively.
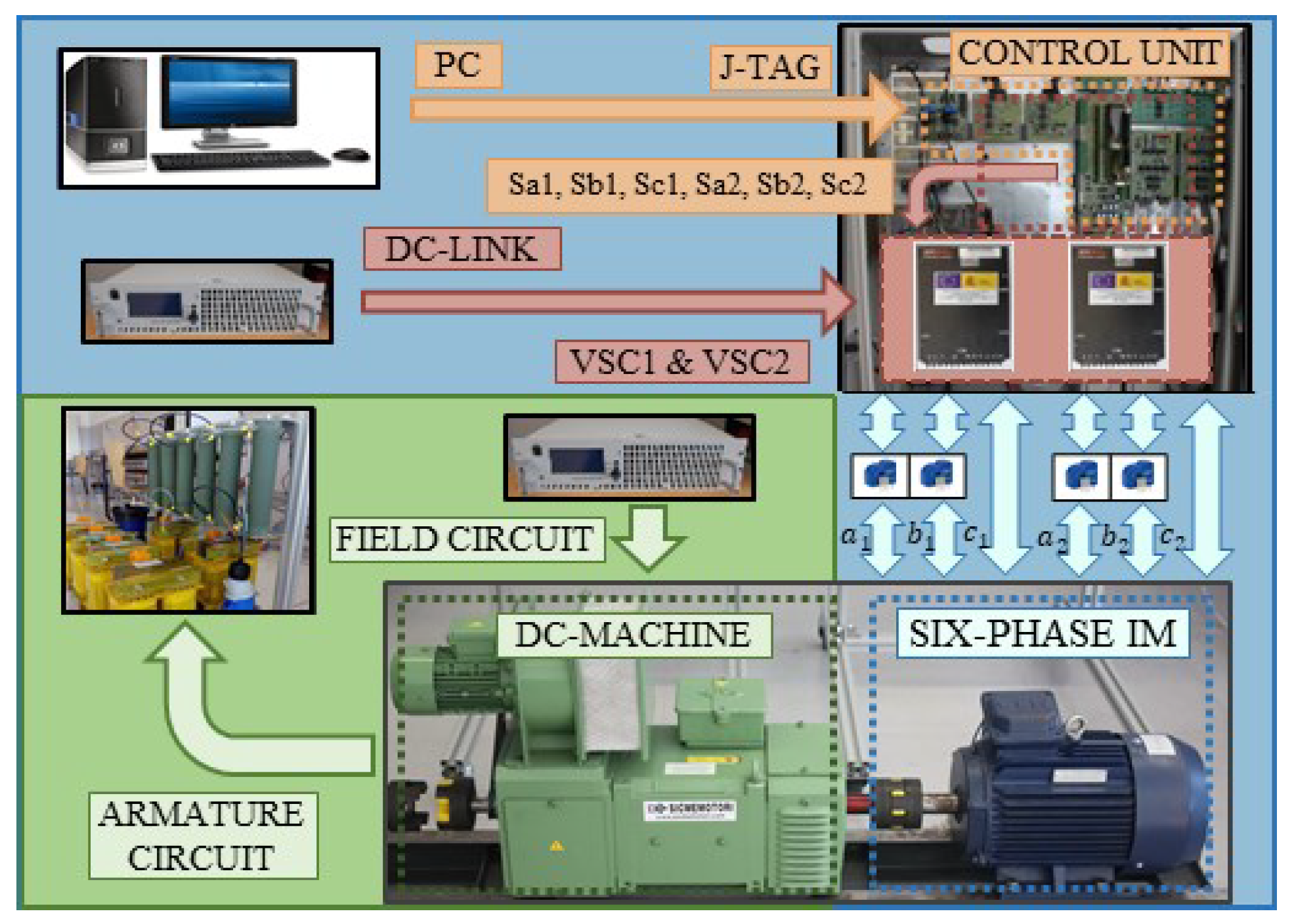
2. Six-Phase Electric Drive Topology
The selected electric drive is formed by an asymmetrical six-phase induction machine (IM) fed by a dual two-level three-phase VSC, as shown in
Figure 1. Focusing on the multiphase machine, the stator windings are distributed and spatially shifted 30. In addition, the machine is configured with two isolated neutral points to simplify the control stage [
24]. Each stator winding is connected to a two-level three-phase VSC. As depicted in
Figure 1, a single DC link is employed in the proposed topology. The stator phase voltages (
) can be obtained using the DC-link voltage (
) and the available switching states (
):
where
is a binary number related to the behavior of each leg of the VSC. If the upper switch of the phase is ON,
and, in contrast, if the lower switch is ON,
. Therefore, 64 stator voltage vectors can be obtained in the selected electric drive.
Although phase variables can be used to describe the behavior of multiphase electric drives, the utilisation of different reference frames and transformations facilitates their understanding and control. Among all the available reference frames in the literature, vector-space decomposition (VSD) is one of the most employed approaches [
25]. For the proposed case study, this transformation allows expressing phase variables into three orthogonal subspaces using the amplitude-invariant Clarke matrix:
where
-
components are related to torque/flux production,
x-
y components only produce stator copper losses in machines with distributed stator windings and
-
currents present a null value due to the use of two isolated neutral points.
The stator voltage vectors can be mapped onto
-
and
x-
y planes. For that purpose, Equation (
2) needs to be applied. In
Figure 2, each voltage vector is identified using a decimal number equivalent to the binary number of the vector
. According to their magnitude in the
-
plane, the voltage vectors can be sorted in five groups: large (
), medium-large (
), medium (
), small (
) and null (
) [
26]. Their production in the main plane is directly related to their dynamic performance, as shown in the next sections.
6. Conclusions
This work clarifies some issues related to the dynamic behavior of some of the most popular control techniques implemented in multiphase electric drives. In order to provide a generalised response, conventional Si-based VSCs at standard switching frequencies were employed in the selected six-phase drive.
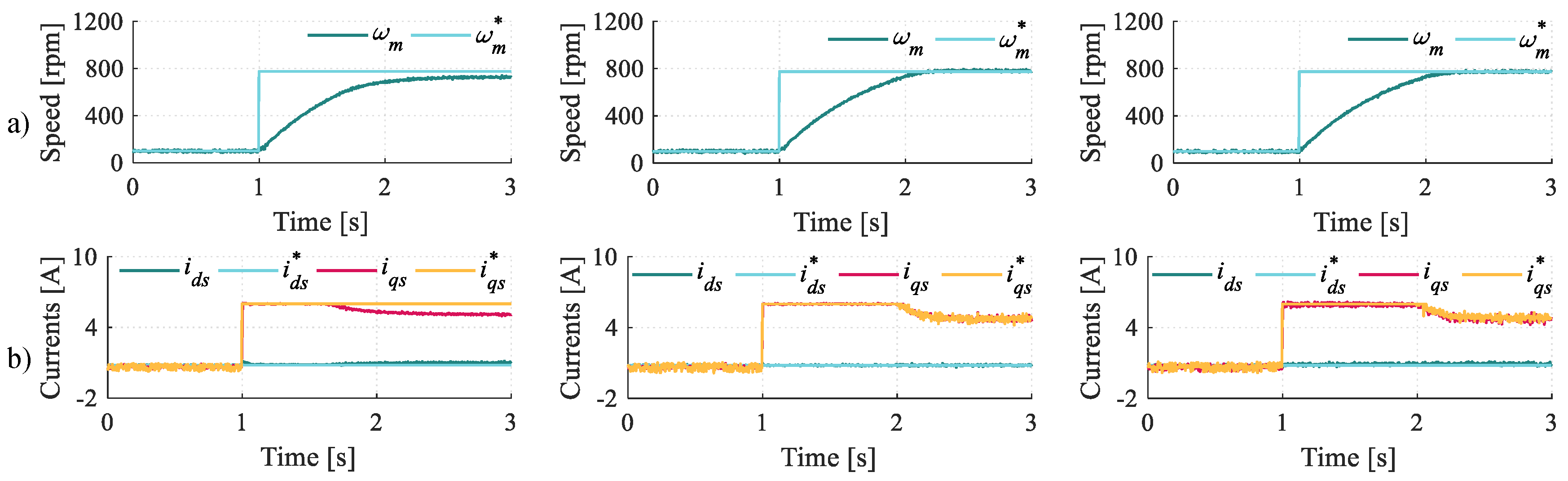
Focusing on speed control, a better current regulation cannot ensure a significantly better speed response due to the mechanical inertia and/or the delay caused by the optical encoder. Analysing the current performance, the results of Tests 1 and 4 provide an interesting conclusion—the sampling period can be considered an influencing factor in terms of reaction time. In other words, IRFOC and FCS-MPC schemes provide the same dead time and slope of the reference q-current when the same sampling period is employed. However, its role in the drive dynamics is shadowed by a factor that proves to be dominating in this case. This significant agent is the usage of DC-link voltage and, in this regard, LFCS-MPC again permits obtaining a better response capacity. In addition, this improvement is achieved with a lower switching frequency for the same control period. However, although FCS-MPC provides better current tracking, the improvement from the point of view of the speed cannot be considered significant due to additional agents. On the other hand, it is necessary to highlight that the reduced utilisation of the DC-link voltage of conventional CB-PWM without harmonic injection can involve a limited mechanical response, as shown in Test 3. In conclusion, IRFOC techniques require the implementation of more complex modulation techniques to provide a higher DC-link usage and then only the integral term will be the single agent that disturbs their dynamic performance from the perspective of the current. Therefore without the utilisation of over-modulation techniques, FCS-MPC will be considered the best option for a transient situation in current terms. Although the advent of wideband-gap devices and more powerful DSPs can provide some advantages in terms of obtaining high-performance control techniques, the role of the voltage DC-link usage can be considered, at this moment, as the crucial factor in obtaining a better dynamic response.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}