
An Inertial Subgradient Extragradient Method for Approximating Solutions to Equilibrium Problems in Hadamard Manifolds

Abstract
:1. Introduction
- (i)
- The method in the present paper uses an adaptive step size which is allowed to increase from iteration to iteration unlike the method in [23,33], where the step sizes decrease monotonically, and the method of [17,24,27], which relies on the Lipschitz condition imposed on the bifunction. Since the relevant Lipschitz constants can be difficult to estimate, this affects the efficiency of the method;
- (ii)
- (iii)
- (iv)
2. Preliminaries
- Space 1: Let and be the Riemannian manifold equipped with the inner product Since the sectional curvature of M is zero [35], M is an Hadamard manifold. Let and with . Then, , , , and .
- Space 2: Let be the product space . Let be the m-dimensional Hadamard manifold with the Riemannian metric and the distance where with and .
- Space 3: See [36]. Let be the n dimensional hyperbolic space of constant sectional curvature The metric of is induced from the Lorentz metric and will be denoted by the same symbol. Consider the following model for
- (i)
- for all
- (ii)
- is continuous.
- (b)
- If for all and then f is a ψ-contraction mapping with a Lipschitz constant k.
- (c)
- Any ψ-contraction mapping is nonexpansive.
- (i)
- Monotone on K if
- (ii)
- Pseudomontone on K if
- (iii)
- Lipschitz-type continuous if there exist constants and such that
- (A1)
- g is pseudomonotone on K and for all
- (A2)
- is upper semicontinuous for all
- (A3)
- is convex and subdifferentiable for all fixed
- (A4)
- g satisfies a Lipschitz-type condition on
- (i)
- (ii)
- (iii)
3. Main Result
- (C1)
- and
| Algorithm 1: Inertial subgradient extragradient method for solving EP (ISEMEP) |
| Initialization: Choose a non-negative sequence of real numbers such that and Step 1: Given and , choose such that where Compute If then stop. Otherwise, go to the next step. Step 2: Define the half-space by Step 3: Compute Set and return to Step 1. |
4. Applications
4.1. An Application to Solving Variational Inequality Problems
- (V1)
- The function G is pseudomonotone on K with ;
- (V2)
- (V3)
- for every and such that
| Algorithm 2: Inertial subgradient extragradient method for solving VIP(ISEMVIP) |
| Initialization:Choose a non-negative sequence of real numbers such that and . Step 1:Given and , choose such that where Compute If then stop. Otherwise, go to the next step. Step 2:Compute and define the half-space by with and compute Step 3:Compute Set and return toStep 1. |
4.2. An Application to Solving Convex Optimization Problems
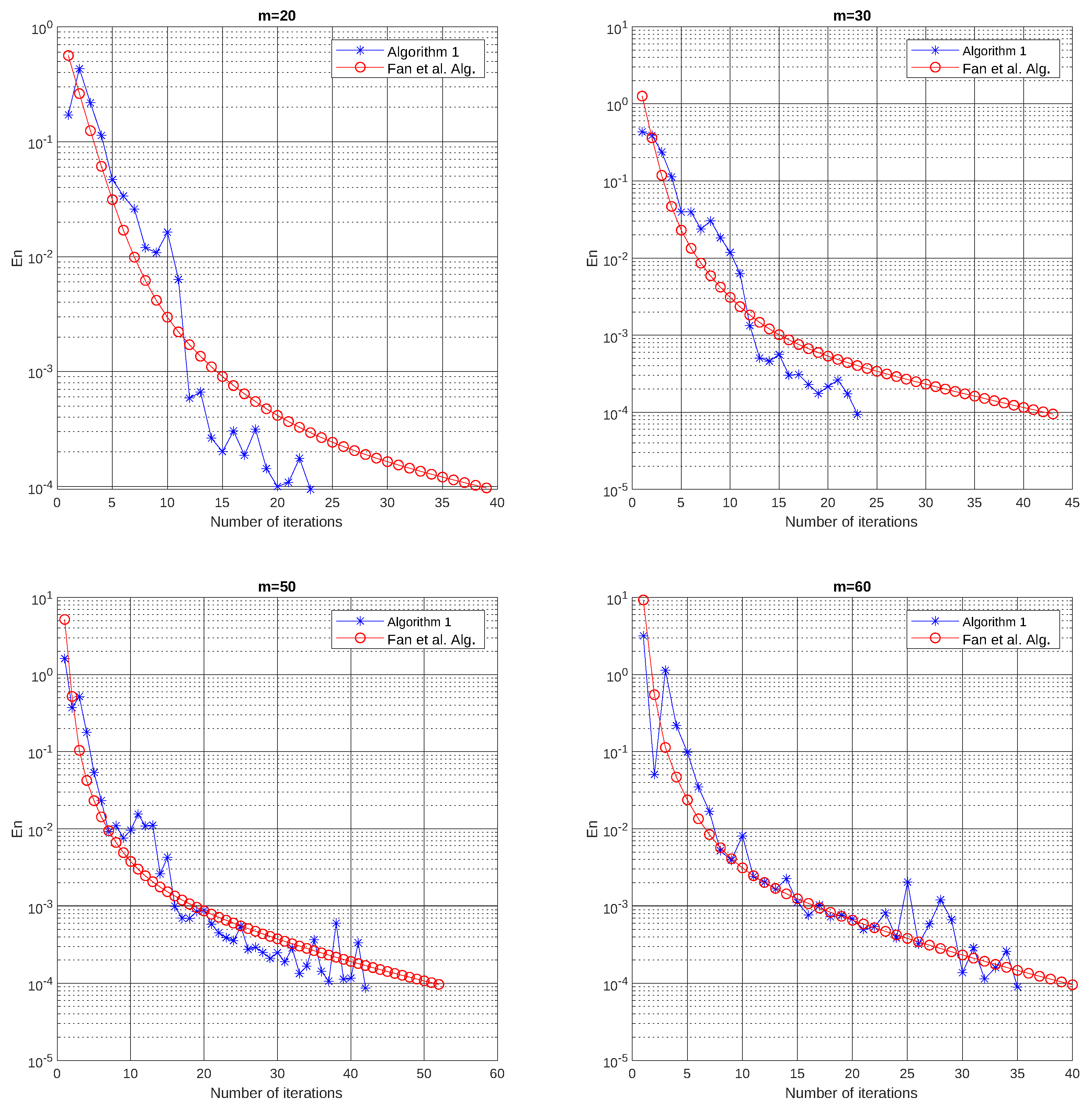
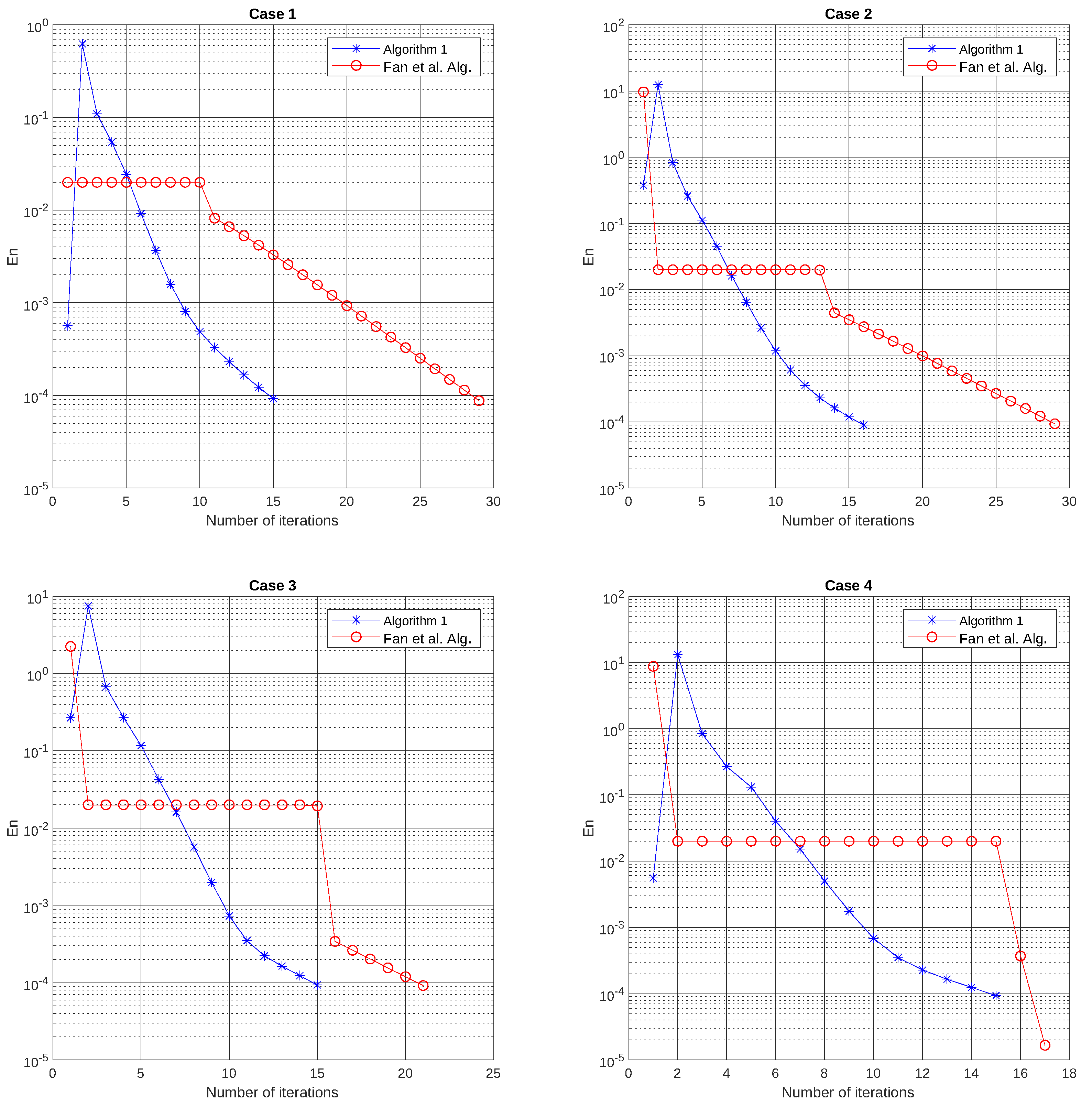
5. Numerical Example
- (Case 1)
- and
- (Case 2)
- and
- (Case 3)
- and
- (Case 4)
- and
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fan, K. A Minimax Inequality and Its Application. In Inequalities; Shisha, O., Ed.; Academic: New York, NY, USA, 1972; Volume 3, pp. 103–113. [Google Scholar]
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Muu, L.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Rapcsák, T. Geodesic convexity in nonlinear optimization. J. Optim. Theory Appl. 1991, 69, 169–183. [Google Scholar] [CrossRef]
- Rapcsák, T. Nonconvex Optimization and Its Applications, Smooth Nonlinear Optimization in Rn; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1997. [Google Scholar]
- Udriste, C. Convex Functions and Optimization Methods on Riemannian Manifolds, Mathematics and Its Applications; Kluwer Academic: Norwell, MA, USA, 1994; Volume 297. [Google Scholar]
- Khammahawong, K.; Kumam, P.; Chaipunya, P.; Yao, J.; Wen, C.; Jirakitpuwapat, W. An extragradient algorithm for strongly pseudomonotone equilibrium problems on Hadamard manifolds. Thai J. Math. 2020, 18, 350–371. [Google Scholar]
- Upadhyay, B.; Ghosh, A.; Mishra, P.; Treanţă, S. Optimality conditions and duality for multiobjective semi-infinite programming problems on Hadamard manifolds using generalized geodesic convexity. RAIRO-Oper. Res. 2022, 56, 2037–2065. [Google Scholar] [CrossRef]
- Colao, V.; López, G.; Marino, G.; Martín-Márquez, V. Equilibrium problems in Hadamard manifolds. J. Math. Anal. Appl. 2012, 388, 61–77. [Google Scholar] [CrossRef] [Green Version]
- Salahuddin, S. The existence of solution for equilibrium problems in Hadamard manifolds. Trans. A. Razmadze Math. Inst. 2017, 171, 381–388. [Google Scholar] [CrossRef]
- Tang, G.; Zhou, L.; Huang, N. Existence results for a class of hemivariational inequality problems on Hadamard manifolds. Optimization 2016, 65, 1451–1461. [Google Scholar] [CrossRef]
- Zhou, L.-W.; Huang, N.-J. Existence of solutions for vector optimization on Hadamard manifolds. J. Optim. Theory Appl. 2013, 157, 44–53. [Google Scholar] [CrossRef]
- Korpelevich, G. An extragradient method for finding saddle points and for other problems. Ekon. Mat. Metody. 1976, 12, 747–756. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tran, D.; Dung, M.; Nguyen, V. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Nguyen, T.; Strodiot, J.; Nguyen, V. Hybrid methods for solving simultaneously an equilibrium problem and countably many fixed point problems in a Hilbert space. J. Optim. Theory Appl. 2014, 160, 809–831. [Google Scholar] [CrossRef]
- Rehman, H.; Kumam, P.; Sitthithakerngkiet, K. Viscosity-type method for solving pseudomonotone equilibrium problems in a real Hilbert space with applications. AIMS Math. 2021, 6, 1538–1560. [Google Scholar] [CrossRef]
- Ceng, L.; Li, X.; Qin, X. Parallel proximal point methods for systems of vector optimization problems on Hadamard manifolds without convexity. Optimization 2020, 69, 357–383. [Google Scholar] [CrossRef]
- Hieu, D.V.; Quy, P.K.; Vy, L.V. Explicit iterative algorithms for solving equilibrium problems. Calcolo 2019, 56, 11. [Google Scholar] [CrossRef]
- Li, C.; López, G.; Martín-Márquez, V. Monotone vector fields and the proximal point algorithm on Hadamard manifolds. J. Lond. Math. Soc. 2009, 79, 663–683. [Google Scholar] [CrossRef]
- Li, C.; Yao, J. Variational inequalities for set-valued vector fields on Riemannian manifolds: Convexity of the solution set and the proximal point algorithm. SIAM J. Control Optim. 2012, 50, 2486–2514. [Google Scholar] [CrossRef]
- Neto, J.C.; Santos, P.; Soares, P. An extragradient method for equilibrium problems on Hadamard manifolds. Optim. Lett. 2016, 10, 1327–1336. [Google Scholar] [CrossRef]
- Fan, J.; Tan, B.; Li, S. An explicit extragradient algorithm for equilibrium problems on Hadamard manifolds. Comp. Appl. Math. 2021, 40, 68. [Google Scholar] [CrossRef]
- Ali-Akbari, M. A subgradient extragradient method for equilibrium problems on Hadamard manifolds. Int. J. Nonlinear Anal. Appl. 2022, 13, 75–84. [Google Scholar]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Polyak, B. Some methods of speeding up the convergence of iterarive methods. Zh. Vychisl. Mat. Mat. Fiz. 1964, 4, 1–17. [Google Scholar]
- Rehman, H.; Kumam, P.; Gibali, A.; Kumam, W. Convergence analysis of a general inertial projection-type method for solving pseudomonotone equilibrium problems with applications. J. Ineq. Appl. 2021, 2021, 63. [Google Scholar] [CrossRef]
- Oyewole, O.; Izuchukwu, C.; Okeke, C.; Mewomo, O. Inertial approximation method for split variational inclusion problem in Banach spaces. Int. J. Nonlinear Anal. Appl. 2020, 11, 285–304. [Google Scholar]
- Moudafi, A. Viscosity approximation methods for fixed-points problems. J. Math. Anal. Appl. 2000, 241, 46–55. [Google Scholar] [CrossRef] [Green Version]
- Al-Homidan, S.; Ansari, Q.; Babu, F.; Yao, J.-C. Viscosity method with a f-contraction mapping for hierarchical variational inequalities on Hadamard manifolds. Fixed Point Theory 2020, 21, 561–584. [Google Scholar] [CrossRef]
- Huang, S. Approximations with weak contractions in Hadamard manifolds. Linear Nonlinear Anal. 2015, 1, 317–328. [Google Scholar]
- Dilshad, M.; Khan, A.; Akram, M. Splitting type viscosity methods for inclusion and fixed point problems on Hadamard manifolds. AIMS Math. 2021, 6, 5205–5221. [Google Scholar] [CrossRef]
- Thong, D.; Hieu, D. Some extragradient-viscosity algorithms for solving variational inequality problems and fixed point problems. Numer. Algorithms 2019, 82, 761–789. [Google Scholar] [CrossRef]
- Sakai, T. Riemannian Geometry. Vol. 149, Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1996. [Google Scholar]
- Ansari, Q.; Babu, F.; Yao, J. Regularization of proximal point algorithms in Hadamard manifolds. J. Fixed Point Theory Appl. 2019, 21, 25. [Google Scholar] [CrossRef]
- Ferreira, O.; Perez, L.L.; Nemeth, S. Singularities of monotone vector fields and an extragradient algorithm. J. Glob. Optim. 2005, 31, 133–151. [Google Scholar] [CrossRef]
- Wang, J.; López, G.; Martín-Márquez, V.; Li, C. Monotone and accretive vector fields on Riemannian manifolds. J. Optim. Theory Appl. 2010, 146, 691–708. [Google Scholar] [CrossRef] [Green Version]
- Boyd, D.; Wong, J. On nonlinear contractions. Proc. Am. Math. Soc. 1969, 20, 335–341. [Google Scholar] [CrossRef]
- Bridson, M.; Haefliger, A. Metric Spaces of Non-Positive Curvature. Grundlehren der Mathematischen Wissenschaften (Fundamental Principles of Mathematical Sciences); Springer: Berlin, Germany, 1999; Volume 319. [Google Scholar] [CrossRef]
- Mastroeni, G. On auxiliary principle for equilibrium problems. In Equilibrium Problems and Variational Models; Nonconvex Optimization and Its Applications; Kluwer Academic: Norwell, MA, USA, 2003; Volume 68, pp. 289–298. [Google Scholar]
- Ferreira, O.; Oliveira, P. Proximal Point Algorithm on Riemannian Manifolds. Optimization 2002, 51, 257–270. [Google Scholar] [CrossRef]
- Takahashi, W. Introduction to Nonlinear and Convex Analysis; Yokohama Publishers: Yokohama, Japan, 2009. [Google Scholar]
- Saejung, S.; Yotkaew, P. Approximation of zeros of inverse strongly monotone operator in Banach spaces. Nonlinear Anal. 2012, 75, 742–750. [Google Scholar] [CrossRef]
- Stampacchia, G. Formes Bilineaires Coercivites sur les Ensembles Convexes. C. R. Acad. Paris 1964, 258, 4413–4416. [Google Scholar]
- Upadhyay, B.; Treanţă, S.; Mishra, P. On Minty Variational Principle for Nonsmooth Multiobjective Optimization Problems on Hadamard Manifolds. Optimization 2022, 71, 1–19. [Google Scholar] [CrossRef]
- Cegielski, A. Iterative Methods for Fixed Point Problems in Hilbert Spaces; Lecture Notes in Mathematics; 2057; Springer: Berlin, Germany, 2012. [Google Scholar]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Series in Operations Research; Springer: New York, NY, USA, 2003; Volume II. [Google Scholar]
- Chen, J.; Liu, S. Extragradient-like method for pseudomonotone equilibrium problems on Hadamard manifolds. J. Ineq. Appl. 2020, 2020, 205. [Google Scholar] [CrossRef]
- Shehu, Y.; Dong, Q.-L.; Jiang, D. Single projection method for pseudo-monotone variational inequality in Hilbert Spaces. Optimization 2019, 68, 385–409. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Algorithm 1 | Fan et al. Alg. | ||
|---|---|---|---|
| No of Iter. | 23 | 39 | |
| CPU time (s) | 0.0013 | 2.9229 | |
| No of Iter. | 23 | 43 | |
| CPU time (s) | 0.0130 | 3.6771 | |
| No of Iter. | 41 | 53 | |
| CPU time (s) | 0.0050 | 5.8712 | |
| No of Iter. | 35 | 40 | |
| CPU time (s) | 0.0050 | 5.8712 |
| Algorithm 1 | Fan et al. Alg. | ||
|---|---|---|---|
| Case 1 | No of Iter. | 15 | 29 |
| CPU time (s) | 0.0013 | 2.9229 | |
| Case 2 | No of Iter. | 17 | 29 |
| CPU time (s) | 0.0130 | 3.6771 | |
| Case 3 | No of Iter. | 15 | 22 |
| CPU time (s) | 0.0050 | 5.8712 | |
| Case 4 | No of Iter. | 15 | 17 |
| CPU time (s) | 0.0050 | 5.8712 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oyewole, O.K.; Reich, S. An Inertial Subgradient Extragradient Method for Approximating Solutions to Equilibrium Problems in Hadamard Manifolds. Axioms 2023, 12, 256. https://doi.org/10.3390/axioms12030256
Oyewole OK, Reich S. An Inertial Subgradient Extragradient Method for Approximating Solutions to Equilibrium Problems in Hadamard Manifolds. Axioms. 2023; 12(3):256. https://doi.org/10.3390/axioms12030256
Chicago/Turabian StyleOyewole, Olawale Kazeem, and Simeon Reich. 2023. "An Inertial Subgradient Extragradient Method for Approximating Solutions to Equilibrium Problems in Hadamard Manifolds" Axioms 12, no. 3: 256. https://doi.org/10.3390/axioms12030256