
A Simultaneous Estimation of the Baseline Intensity and Parameters for Modulated Renewal Processes


{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory and Methodology
2.1. Estimation of Baseline Intensity
2.2. Estimation of Parameters in the External Process
2.3. Estimation Algorithm
- Step 1: Set , or , where n is the total number of event and is the observing time window.
- Step 2 (Maximization): Estimate through an MLE, with , i.e.,whereand .
- Step 3 (Expectation): Update
- Step 4 (Rescaling): Let .
- Step 5: If , where is a small number, stop; otherwise, let , and go back to Step 2.
3. Comparison with Existing Estimates
4. Applications
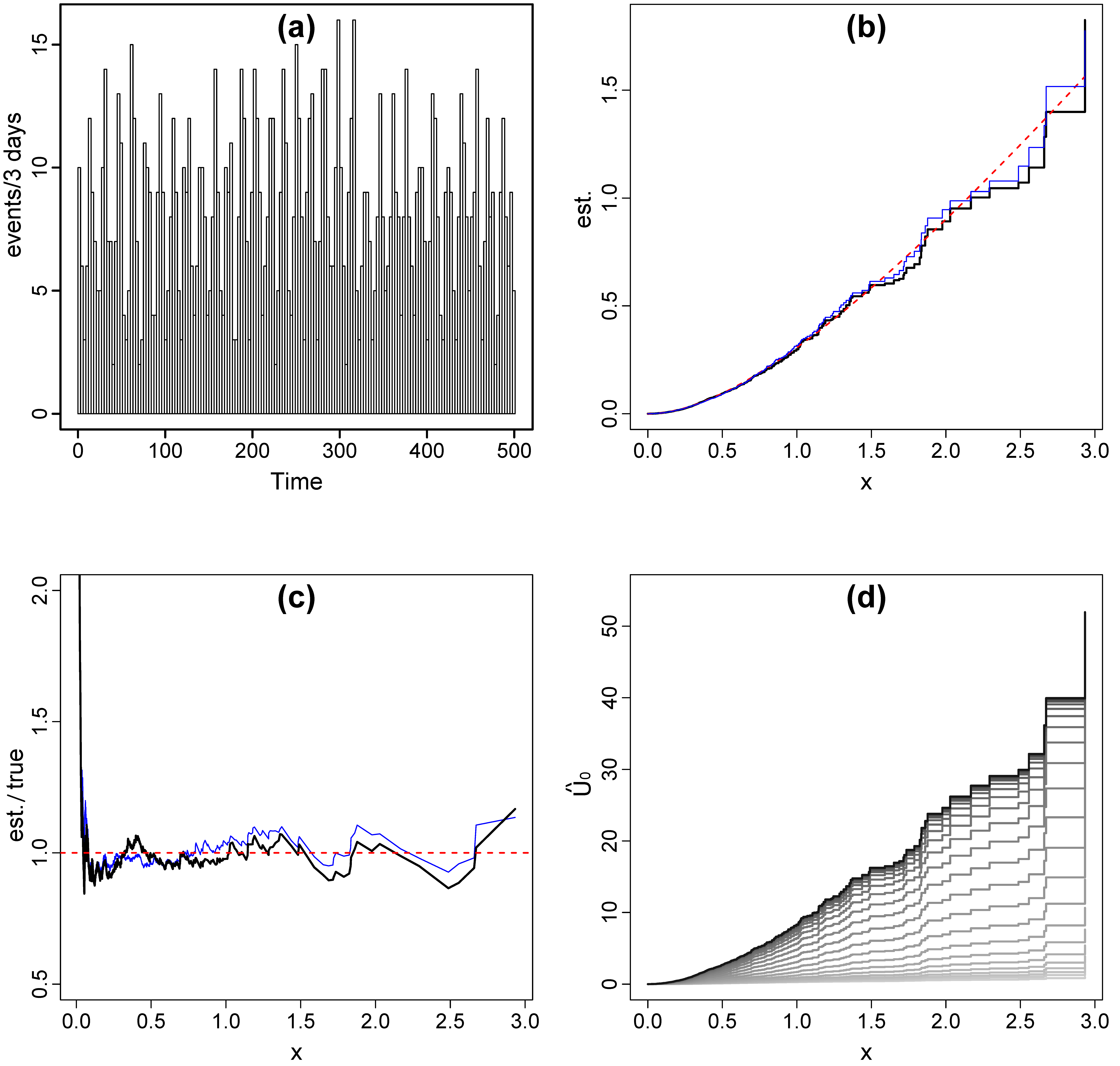
4.1. Simulation Study
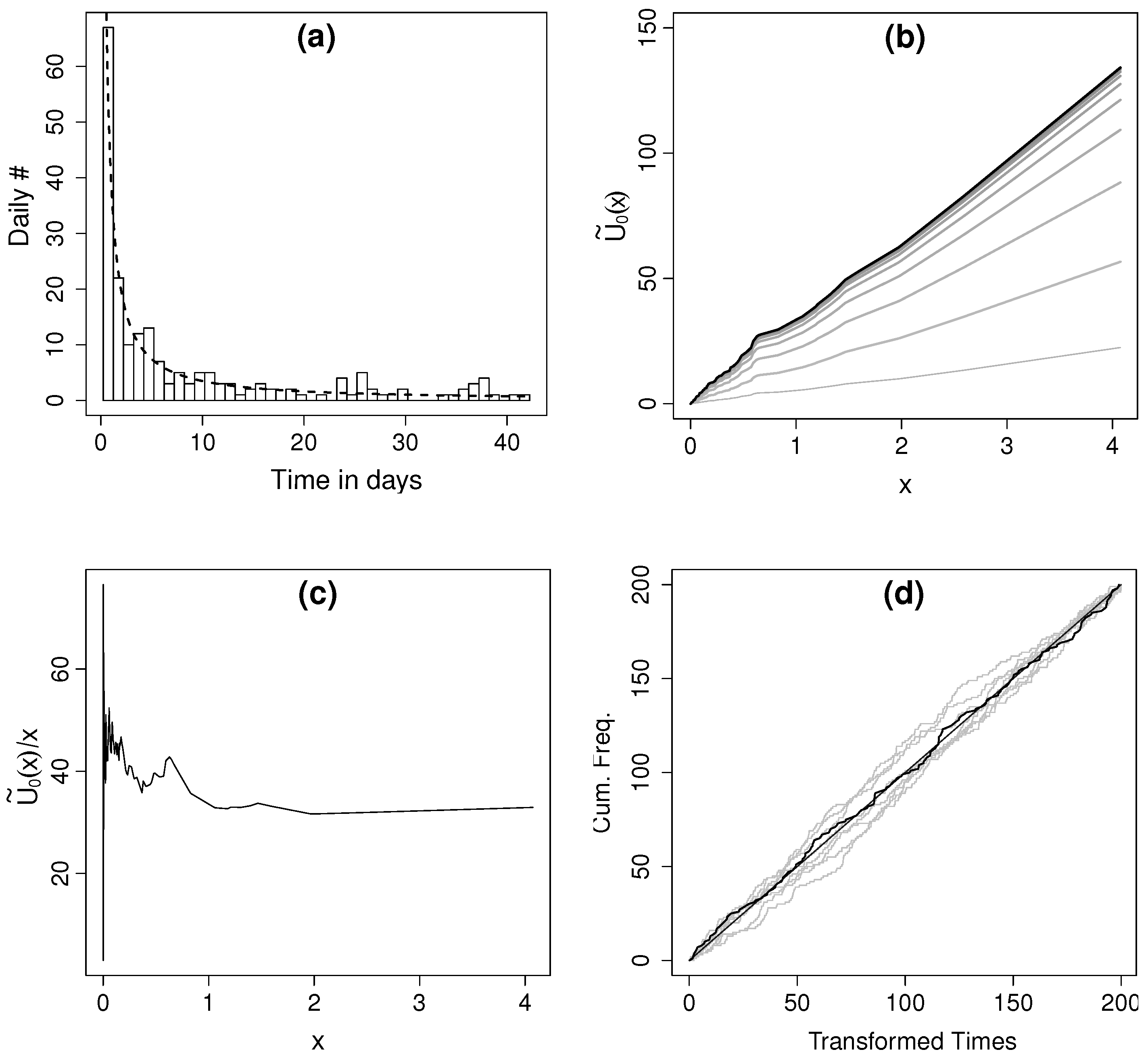
4.2. Real Data: Wenchuan Earthquake
5. Transformed Time Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Algorithm for Simulating a Modulated Renewal Process
- Step 1. Find three positive numbers D, , and such that and for .
- Step 2. Starting from t, generate the next event according to a Poisson process with rate . Suppose that its occurrence time is , that is to say, has an exponential distribution with a rate of .
- Step 3. Stop the simulation if is greater than the termination time.
- Step 4. If , then let and return to step 1.
- Step 5. Generate an r. v. . If , accept , i.e., set and ; otherwise, let and return to step 1.
References
- Cox, D.R. Renewal Theory; Methuen: London, UK, 1962. [Google Scholar]
- Cox, D.R.; Lewis, P.A.W. The Statistical Analysis of Series of Events; Methuen: London, UK, 1966. [Google Scholar]
- Cox, D.R. The statistical analysis of dependencies in point processes. In Stochastic Point Processes; Lewis, P.A.W., Ed.; John Wiley: New York, NY, USA, 1972; pp. 55–66. [Google Scholar]
- Nomura, S.; Ogata, Y.; Nadeau, R.M. Space-Time model for repeating earthquakes and analysis of recurrence intervals on the San Andreas Fault near Parkfield, California. J. Geophys. Res. 2014, 119, 7092–7122. [Google Scholar] [CrossRef]
- Andersen, P.K.; Gill, R.D. Cox’s regression model for counting processes: A large sample study. Ann. Stat. 1982, 10, 1100–1120. [Google Scholar] [CrossRef]
- Lin, D.Y.; Wei, L.J.; Yang, I.; Ying, Z. Semiparametric regression for the mean and rate functions of recurrent events. J. R. Stat. Soc. Ser. 2000, 62, 711–730. [Google Scholar] [CrossRef] [Green Version]
- Cox, D.R. Regression models and life-tables (with discussion). J. R. Stat. Soc. Ser. 1972, 34, 187–220. [Google Scholar]
- Cox, D.R. Partial likelihood. Biometrika 1975, 62, 269–276. [Google Scholar] [CrossRef]
- Nelson, W. Hazard plotting for incomplete failure data. J. Qual. Technol. 1969, 1, 27–52. [Google Scholar] [CrossRef]
- Nelson, W. Theory and applications of hazard plotting for censored failure data. Technometrics 1972, 14, 945–965. [Google Scholar] [CrossRef]
- Aalen, O.O. Statistical Inference for a Family of Counting Processes. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1975. [Google Scholar]
- Aalen, O.O. Nonparametric inference for a family of counting processes. Ann. Stat. 1978, 6, 701–726. [Google Scholar] [CrossRef]
- Breslow, N.E. Discussion of the paper by D. R. Cox. J. R. Stat. Soc. Ser. 1972, 34, 216–217. [Google Scholar]
- Tsiatis, A.A. A large sample study of Cox’s regression model. Ann. Stat. 1981, 9, 93–108. [Google Scholar] [CrossRef]
- Lin, F.; Fine, P. Pseudomartingale estimating equations for modulated renewal process models. J. R. Stat. Soc. Ser. 2009, 71, 3–23. [Google Scholar] [CrossRef]
- Zhuang, J. Second-order residual analysis of spatiotemporal point processes and applications in model evaluation. J. R. Stat. Soc. Ser. 2006, 68, 635–653. [Google Scholar] [CrossRef]
- Baddeley, A.; Turner, R.; Møller, J.; Hazelton, M. Residual analysis for spatial point processes (with discussion). J. R. Stat. Soc. Ser. 2005, 67, 617–666. [Google Scholar] [CrossRef] [Green Version]
- Ogata, Y. Statistical Models for Earthquake Occurrences and Residual Analysis for Point Processes. J. Am. Stat. Assoc. 1988, 83, 9–27. [Google Scholar] [CrossRef]
- Ogata, Y. Space-Time point-process models for earthquake occurrences. Ann. Inst. Stat. Math. 1998, 50, 379–402. [Google Scholar] [CrossRef]
- Daley, D.D.; Vere–Jones, D. An Introduction to Theory of Point Processes, 2nd ed.; Volume 1: Elementary Theory and Methods; Springer: New York, NY, USA, 2003. [Google Scholar]
- Oakes, D.; Cui, L. On semiparametric inference for modulated renewal processes. Biometrika 1994, 81, 83–90. [Google Scholar] [CrossRef]
- Berman, M. Inhomogeneous and modulated gamma processes. Biometrika 1981, 68, 143–152. [Google Scholar] [CrossRef]
- Oakes, D. Survival times: Aspects of partial likelihood. Int. Stat. Rev. 1981, 49, 235–252. [Google Scholar] [CrossRef]
- Kagan, Y.Y.; Jackson, D.D. New seismic gap hypothesis: Five years after. J. Geophys. Res. 1995, 100, 3943–3959. [Google Scholar] [CrossRef]
- Zhuang, J.; Harte, D.S.; Werner, M.J.; Hainzl, S.; Zhou, S. Basic Models of Seismicity: Temporal Models. Community Online Resour. Stat. Seism. 2012. Available online: http://www.corssa.org (accessed on 21 June 2022). [CrossRef]
- Utsu, T. Statistical study on the occurrence of aftershocks. Geophys. Mag. 1961, 30, 521–605. [Google Scholar]
- Utsu, T.; Ogata, Y.; Matsura, R.S. The centenary of the Omori formula for a decay law of aftershock activity. J. Phys. Earth 1995, 43, 1–33. [Google Scholar] [CrossRef]
- Schoenberg, F.P. On rescaled Poisson processes and the Brownian bridge. Ann. Inst. Stat. Math. 2002, 54, 445–457. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, J.; Siew, H.-Y. A Simultaneous Estimation of the Baseline Intensity and Parameters for Modulated Renewal Processes. Axioms 2022, 11, 303. https://doi.org/10.3390/axioms11070303
Zhuang J, Siew H-Y. A Simultaneous Estimation of the Baseline Intensity and Parameters for Modulated Renewal Processes. Axioms. 2022; 11(7):303. https://doi.org/10.3390/axioms11070303
Chicago/Turabian StyleZhuang, Jiancang, and Hai-Yen Siew. 2022. "A Simultaneous Estimation of the Baseline Intensity and Parameters for Modulated Renewal Processes" Axioms 11, no. 7: 303. https://doi.org/10.3390/axioms11070303