Sparse 3D Seismic Imaging in the Kylylahti Mine Area, Eastern Finland: Comparison of Time Versus Depth Approach

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
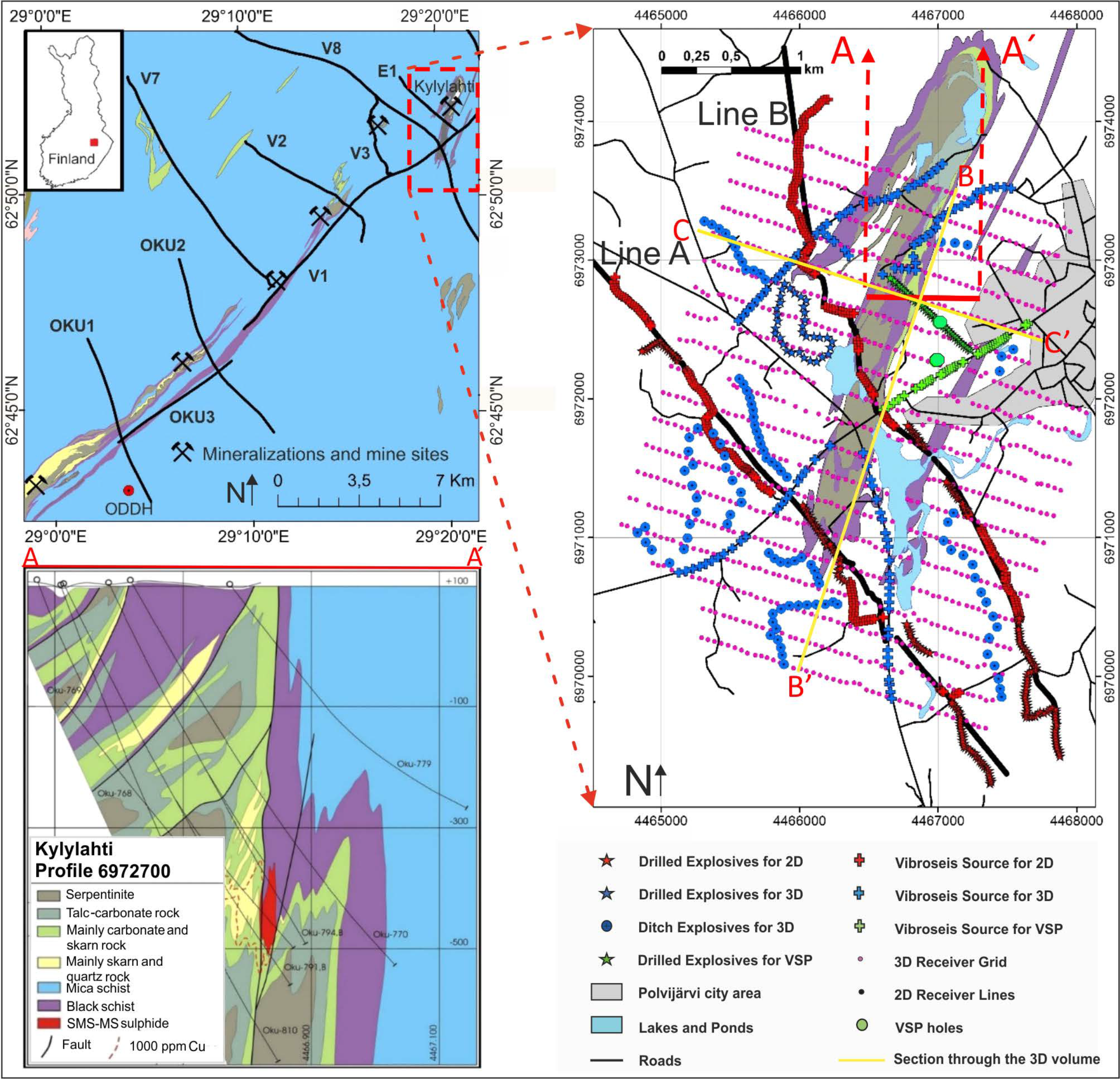
2.1. Geological Background
2.2. COGITO-MIN 3D Seismic Survey
2.3. Basic Theory of the Specialized Kirchhoff Pre-Stack Depth Migration
3. Results
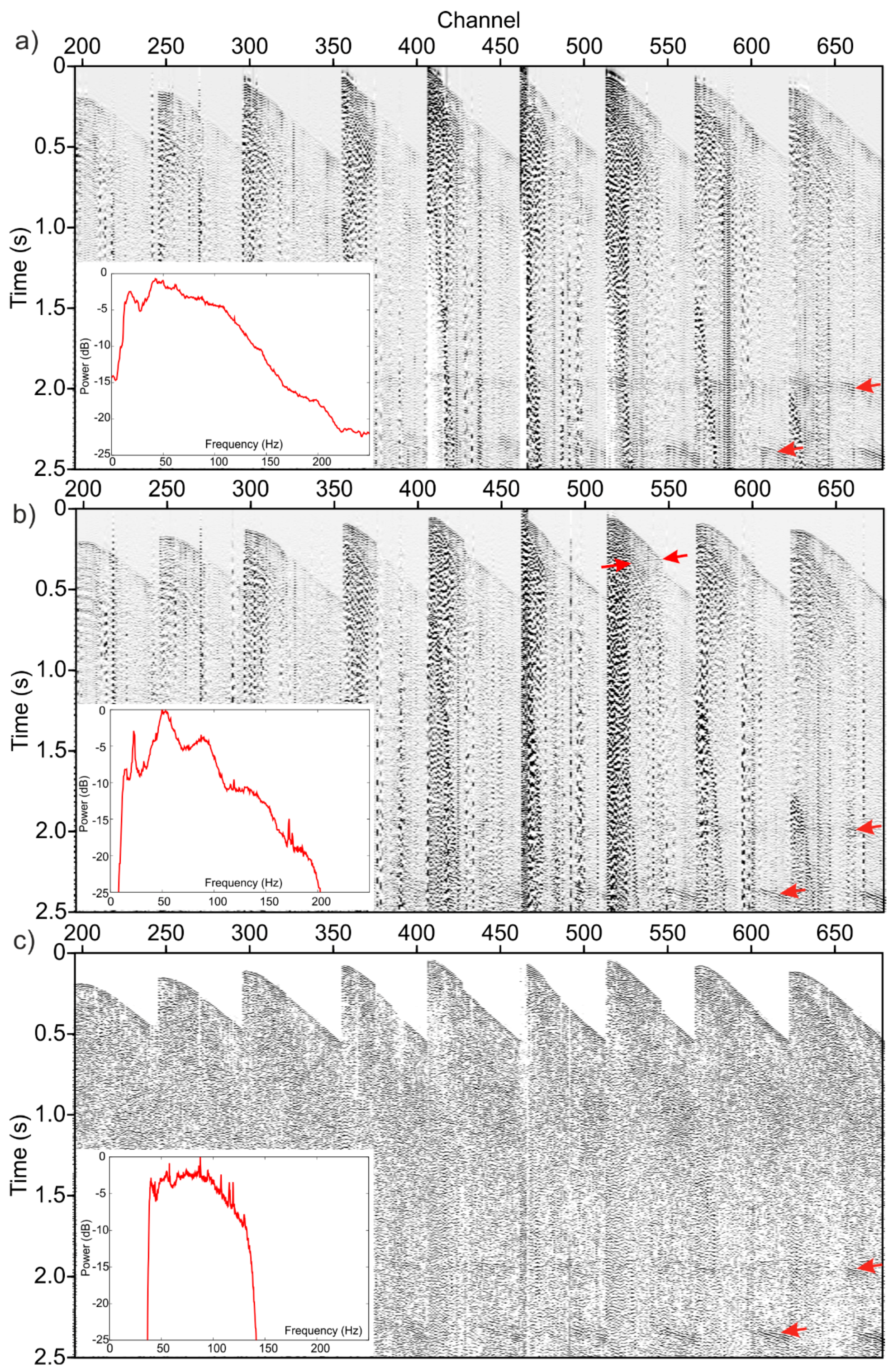
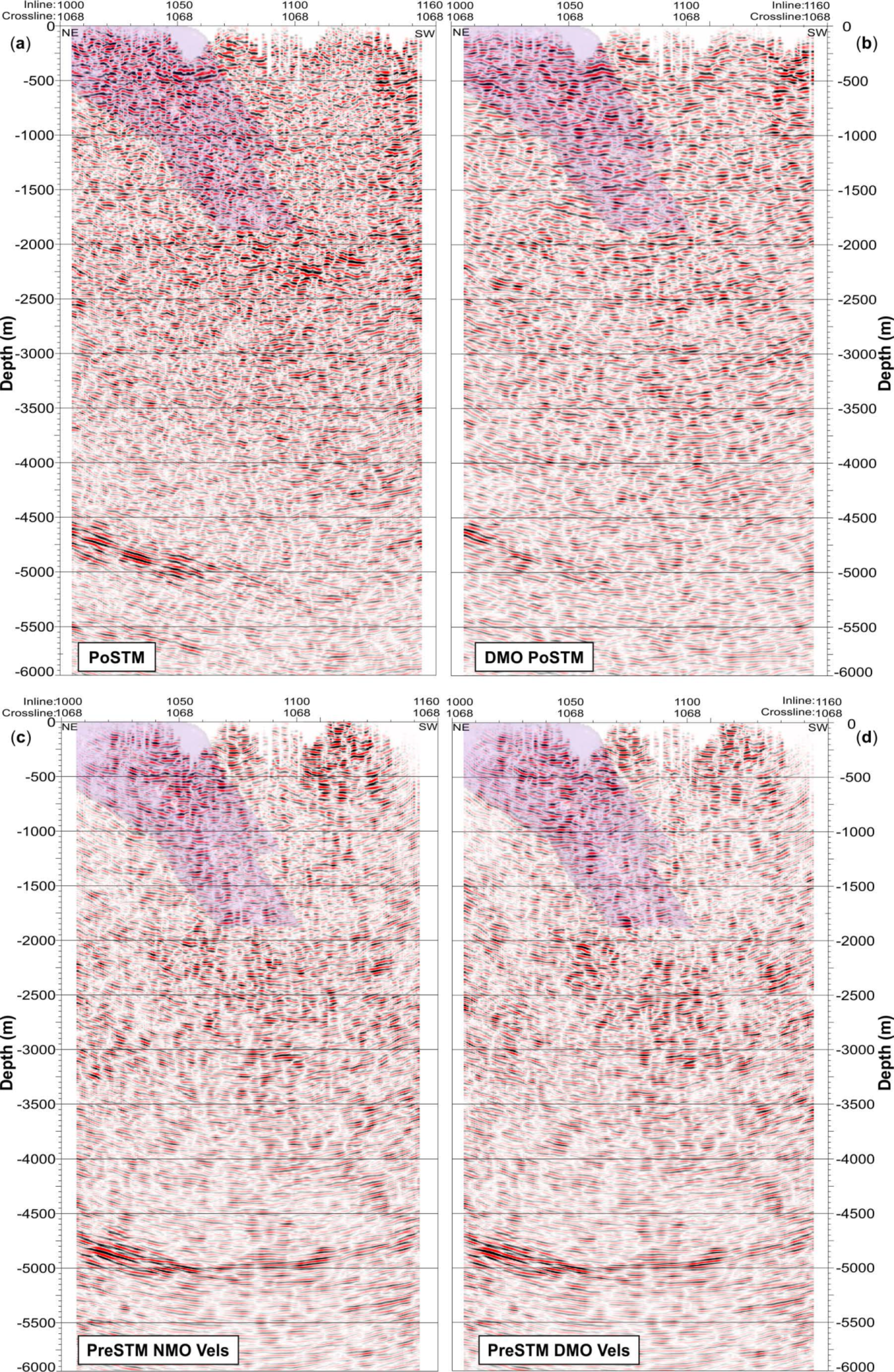
3.1. Data Processing and Time-Domain Imaging
3.2. Depth-Domain Imaging
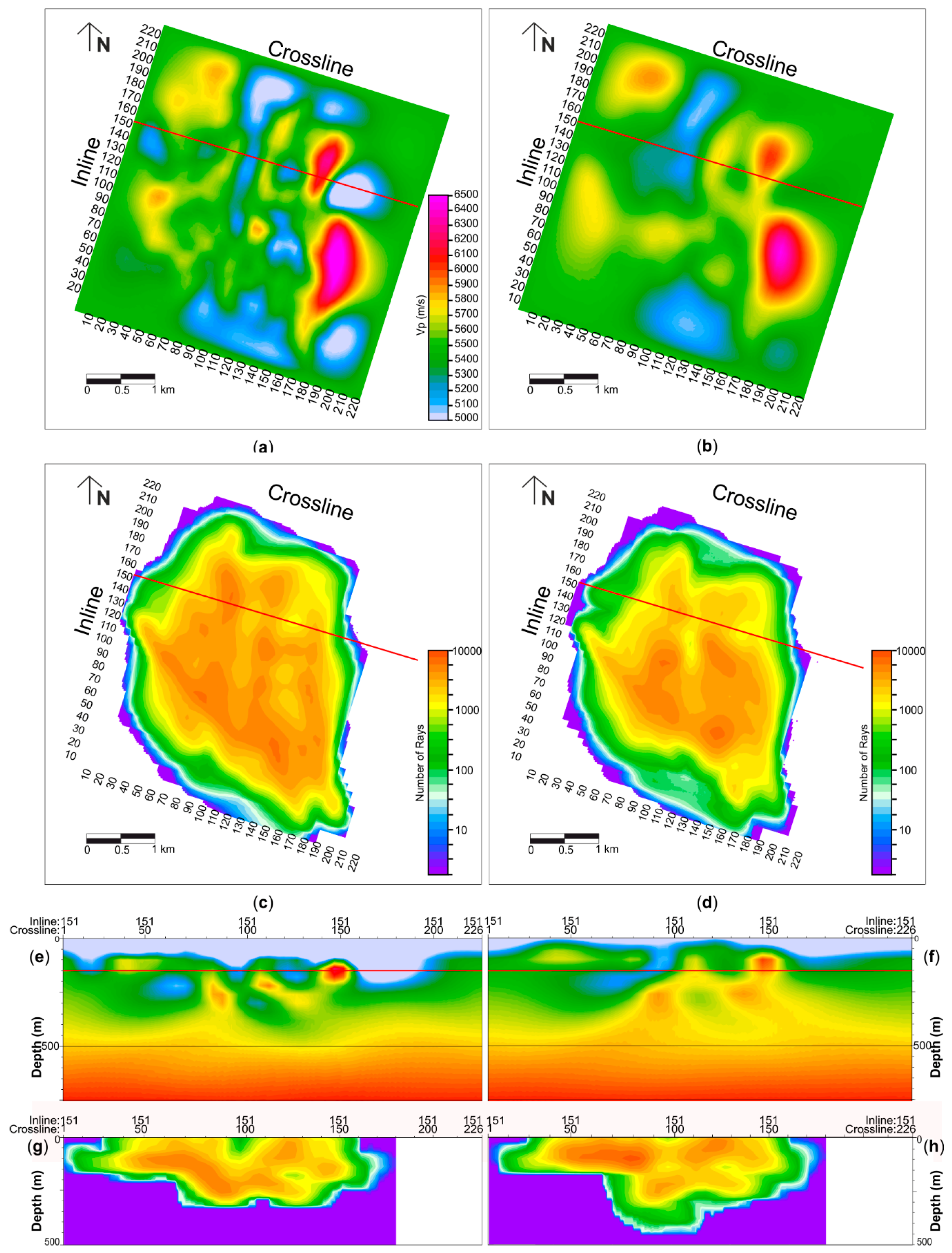
3.2.1. Velocity Model Building
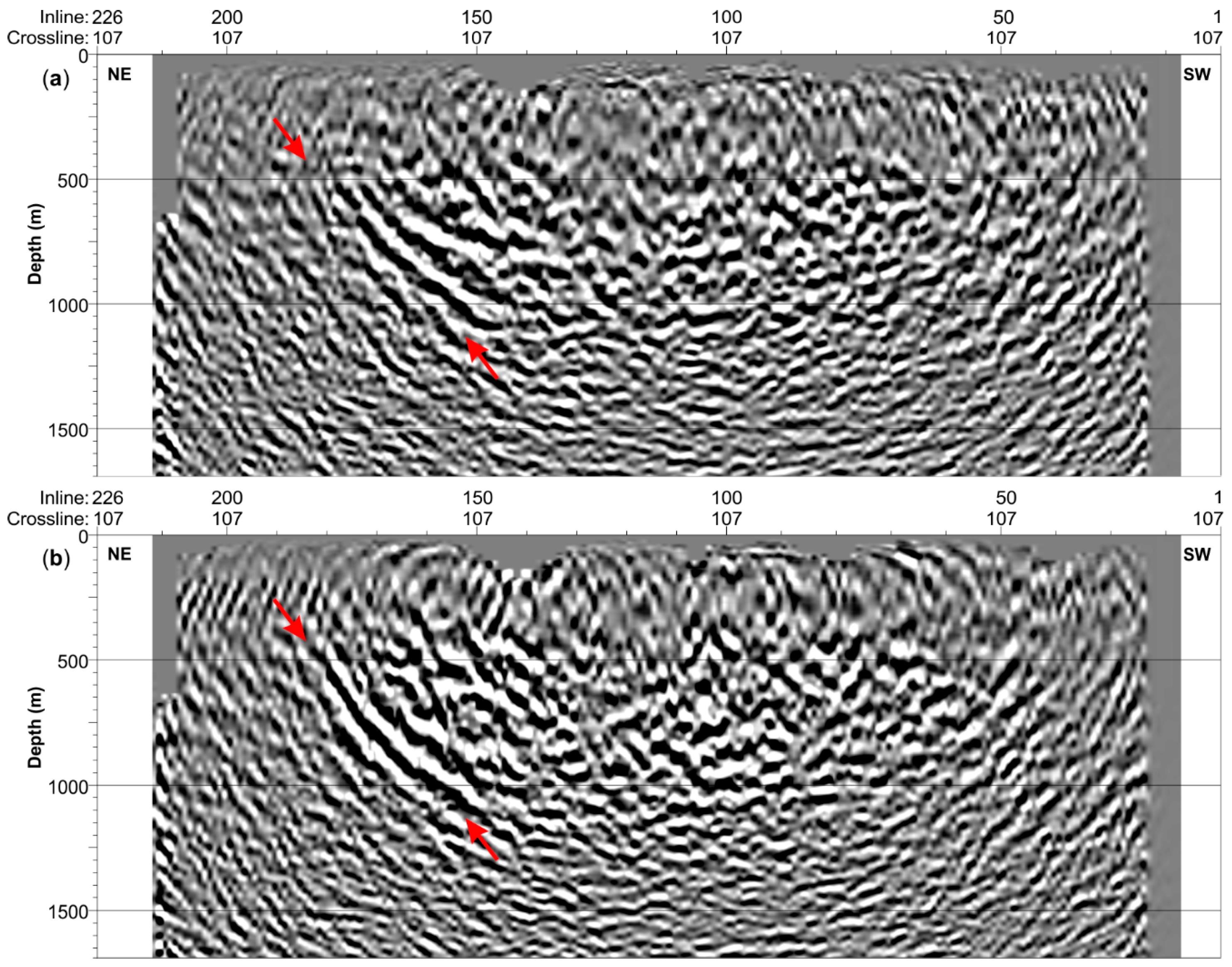
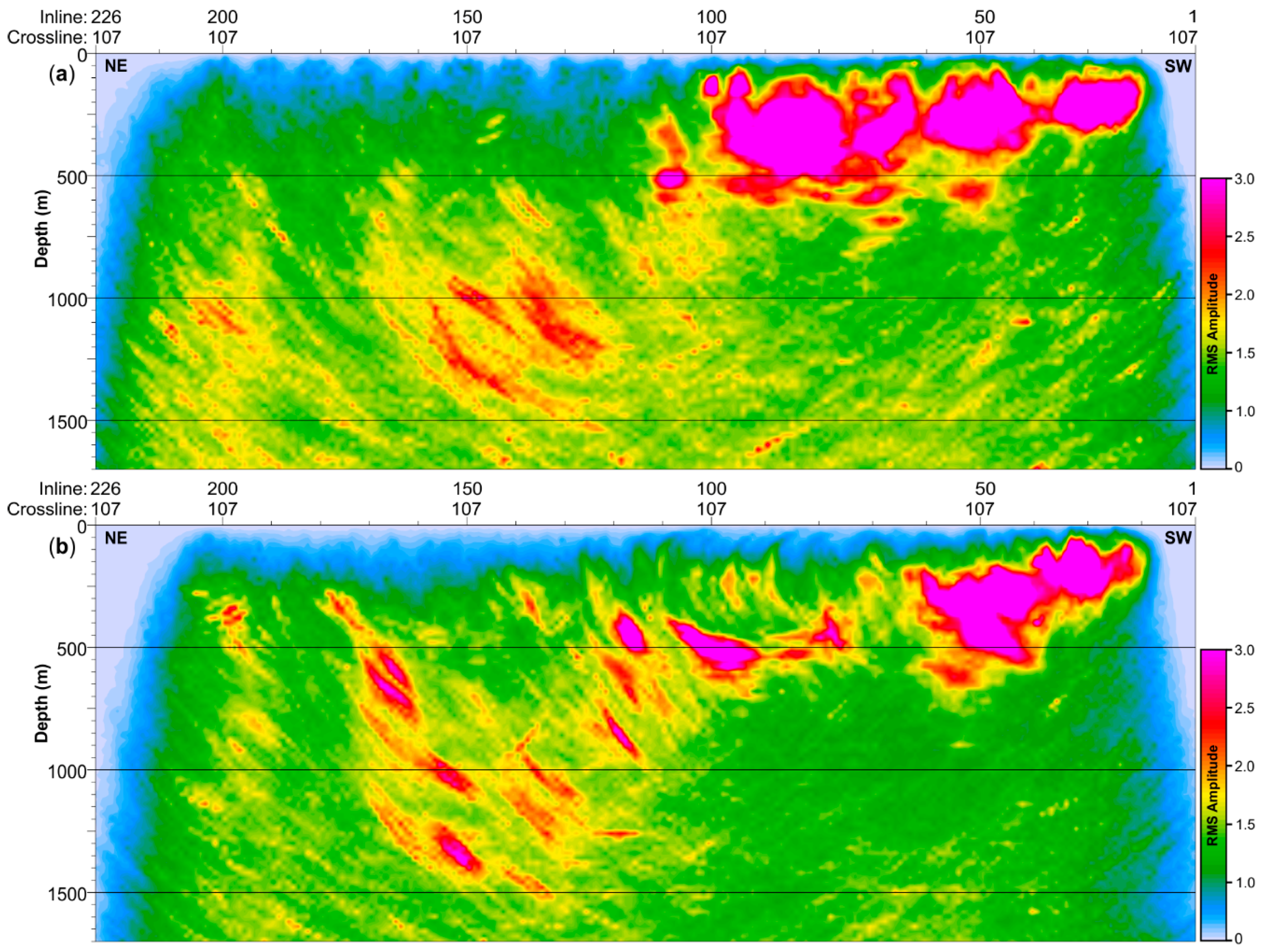
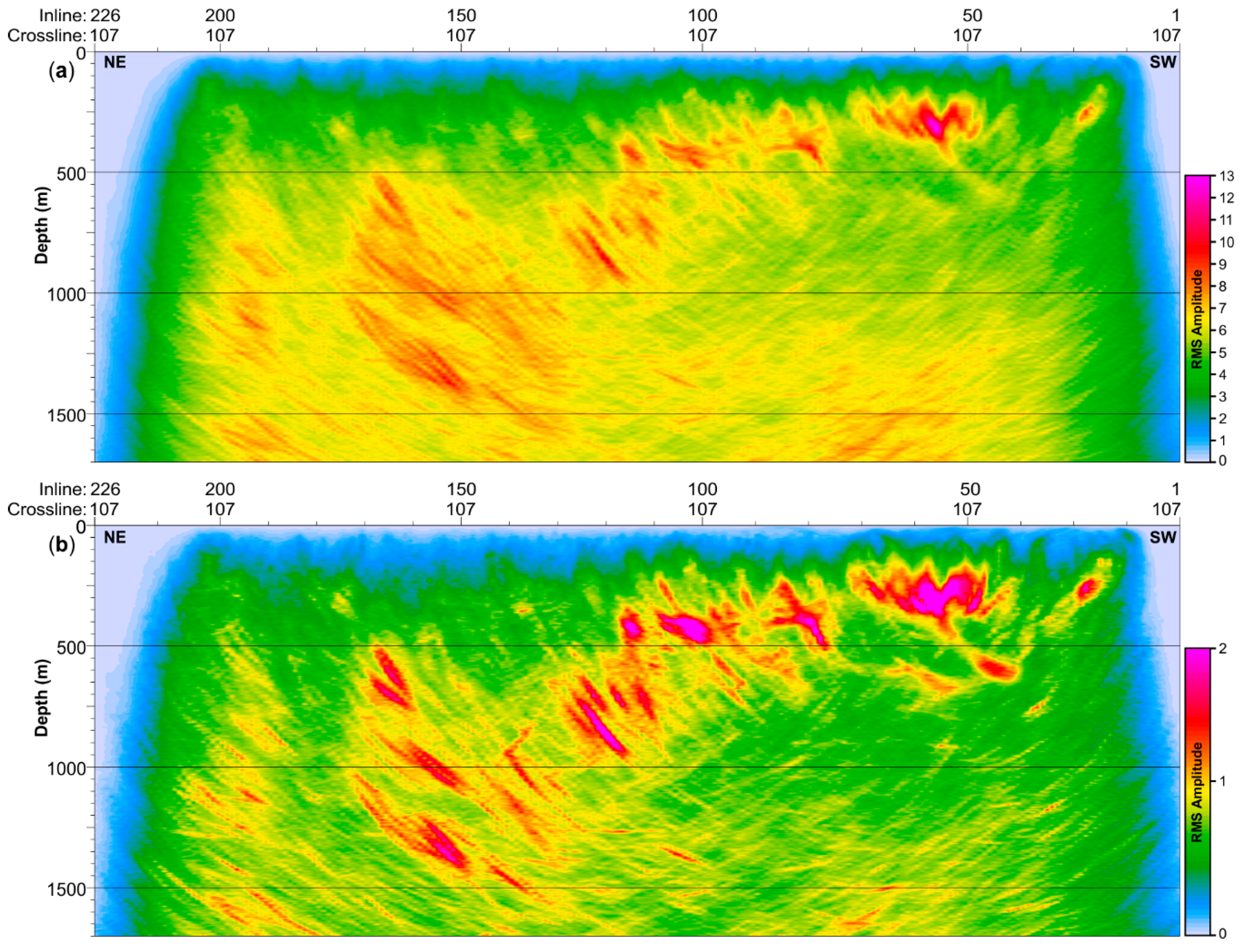
3.2.2. Standard Kirchhoff Pre-Stack Depth Migration (KPreSDM)
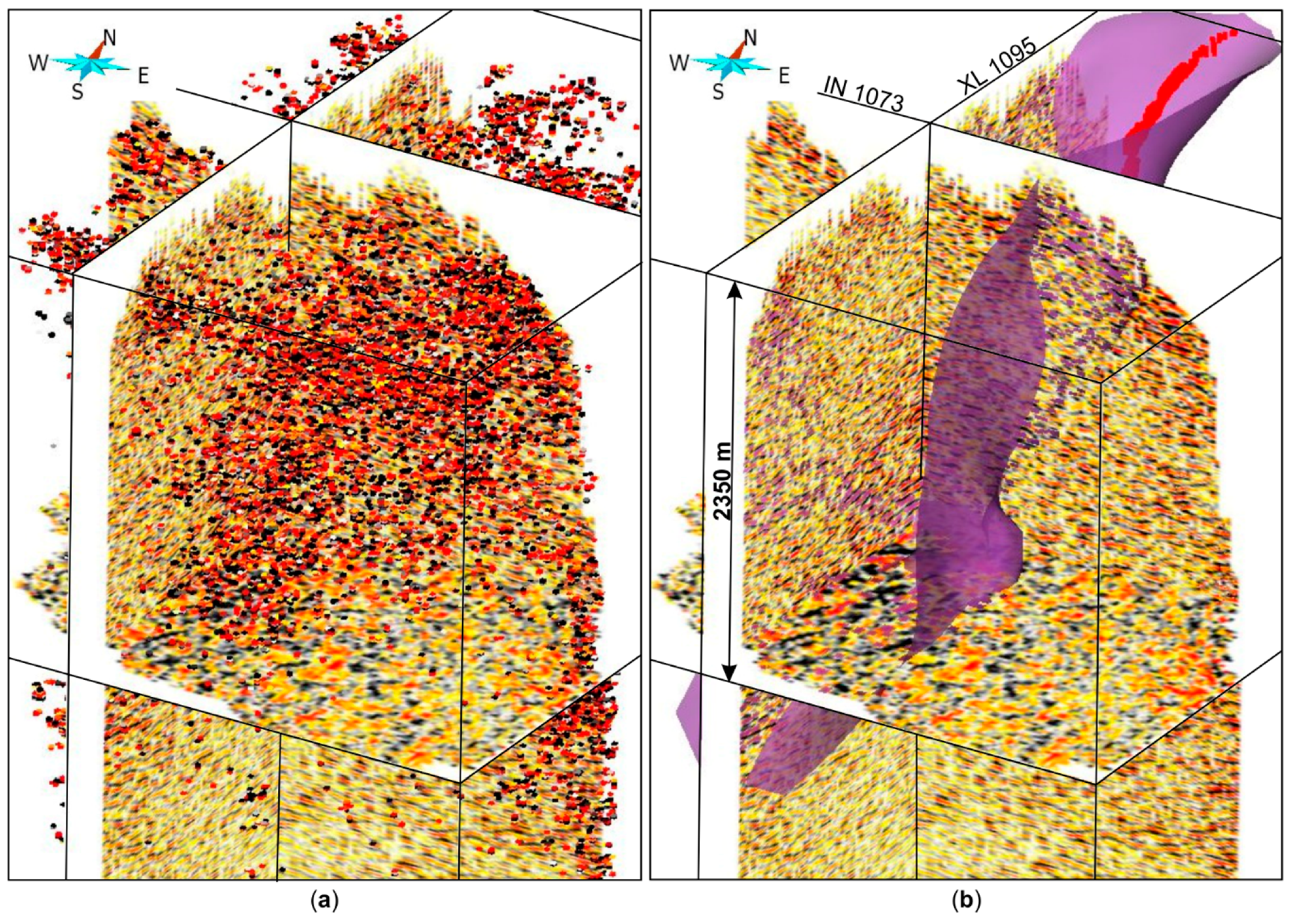
3.2.3. Specialized Kirchhoff PreSDM
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Reed, L.E. Seismic Reflection Surveying for Mining Exploration Applications. A Review of Practice Past and Current with an Outlook for the Future, Toronto, Mineral Industry Technology Council of Canada (MI-TEC) Report. 1993; 219p, Unpublished.
- Milkereit, B.; Berrer, E.K.; King, A.R.; Watts, A.H.; Roberts, B.; Adam, E.; Eaton, D.W.; Wu, J.; Salisbury, M.H. Development of 3-D seismic exploration technology for deep nickel-copper deposits—A case history from the Sudbury basin, Canada. Geophysics 2000, 65, 1890–1899. [Google Scholar] [CrossRef]
- Bellefleur, G.; Cheraghi, S.; Malehmir, A. Reprocessing legacy three-dimensional seismic data from the Halfmile Lake and Brunswick No. 6 volcanogenic massive sulphide deposits, New Brunswick, Canada. Can. J. Earth Sci. 2018. [Google Scholar] [CrossRef]
- Cheraghi, S.; Malehmir, A.; Bellefleur, G. 3D imaging challenges in steeply dipping mining structures: New lights on acquisition geometry and processing from the Brunswick no. 6 seismic data, Canada. Geophysics 2012, 77, WC109–WC122. [Google Scholar] [CrossRef]
- Koivisto, E.; Malehmir, A.; Hellqvist, N.; Voipio, T.; Wijns, C. Building a 3D model of lithological contacts and near-mine structures in the Kevitsa mining and exploration site, Northern Finland: Constraints from 2D and 3D reflection seismic data. Geophys. Prospect. 2015, 63, 754–773. [Google Scholar] [CrossRef]
- Malehmir, A.; Bellefleur, G. 3D seismic reflection imaging of volcanic-hosted massive sulfide deposits: Insights from reprocessing Halfmile Lake data, New Brunswick, Canada. Geophysics 2009, 74, B209–B219. [Google Scholar] [CrossRef]
- Malehmir, A.; Tryggvason, A.; Wijns, C.; Koivisto, E.; Lindqvist, T.; Skyttä, P.; Montonen, M. Why 3D seismic data are an asset for exploration and mine planning? Velocity tomography of weakness zones in the Kevitsa Ni-Cu-PGE mine, northern Finland. Geophysics 2017, 83, B33–B46. [Google Scholar] [CrossRef]
- White, D.J.; Secord, D.; Malinowski, M. 3D seismic imaging of volcanogenic massive sulfide deposits in the Flin Flon mining camp, Canada: Part 1—Seismic results. Geophysics 2012, 77, WC47–WC58. [Google Scholar] [CrossRef]
- White, D.J.; Malinowski, M.; Devine, C.; Gilmore, K.; Schetselaar, E.; Pehrsson, S. Drill Targeting with 3-D Seismics for Volcanogenic Massive Sulfide Exploration in the Flin Flon Mining Camp. Econ. Geol. 2016, 111, 903–912. [Google Scholar] [CrossRef]
- Bellefleur, G.; Schetselaar, E.; White, D.; Miah, K.; Dueck, P. 3D seismic imaging of the Lalor volcanogenic massive sulphide deposit, Manitoba, Canada. Geophys. Prospect. 2015, 63, 813–832. [Google Scholar] [CrossRef]
- Jones, F. Velocities, Imaging and Waveform Inversion: The Evolution of Characterising the Earth’s Subsurface; EAGE: Warsaw, Poland, 2018; p. 259. ISBN 978-94-6282-253-5. [Google Scholar]
- Hloušek, F.; Buske, S. Fresnel Volume Migration of the ISO89-3D data set. Geophys. J. Int. 2016, 207, 1273–1285. [Google Scholar] [CrossRef]
- Schreiter, L.; Hloušek, F.; Hellwig, O.; Buske, S. Characterization of seismic reflections from faults in a crystalline environment, Schneeberg, Germany. Geophys. Prospect. 2015, 63, 1015–1032. [Google Scholar] [CrossRef]
- Lüth, S.; Buske, S.; Giese, R.; Goertz, A. Fresnel volume migration of multicomponent data. Geophysics 2005, 70, S121–S129. [Google Scholar] [CrossRef]
- Buske, S.; Gutjahr, S.; Sick, C. Fresnel volume migration of single-component seismic data. Geophysics 2009, 74, WCA47–WCA55. [Google Scholar] [CrossRef]
- Hloušek, F.; Hellwig, O.; Buske, S. Improved structural characterization of the Earth’s crust at the German Continental Deep Drilling Site using advanced seismic imaging techniques. J. Geophys. Res. Solid Earth 2015, 120, 6943–6959. [Google Scholar] [CrossRef]
- Koivisto, E.; Malinowski, M.; Heinonen, S.; Cosma, C.; Wojdyla, M.; Vaittinen, K.; Chamarczuk, M.; Riedel, M.; Kukkonen, I.; The COGITO-MIN Working Group. From Regional Seismics to High-Resolution Resource Delineation: Example from the Outokumpu Ore District, Eastern Finland. In EAGE 2nd Conference on Geophysics for Mineral Exploration and Mining; Extended Abstract, Tu 2MIN P04; EAGE: Porto, Portugal, 2018. [Google Scholar]
- Chamarczuk, M.; Malinowski, M.; Draganov, D.; Koivisto, E.; Heinonen, S.; Juurela, S.; Group, C.-M.W. Seismic Interferometry for Mineral Exploration: Passive Seismic Experiment over Kylylahti Mine Area, Finland. In EAGE 2nd Conference on Geophysics for Mineral Exploration and Mining; Extended Abstract, Tu 2MIN 03; EAGE: Porto, Portugal, 2018. [Google Scholar]
- Heinonen, S.; Malinowski, M.; Hloušek, F.; Gislason, G.; Koivisto, E.; Buske, S.; The COGITO-MIN Working Group. Seismic Exploration in The Kylylahti Cu-Au-Zn Mining Area: Comparison of Time and Depth Imaging Approaches. In EAGE 2nd Conference on Geophysics for Mineral Exploration and Mining; Extended Abstract, Tu 2MIN P01; EAGE: Porto, Portugal, 2018. [Google Scholar]
- Riedel, M.; Cosma, C.; Enescu, N.; Koivisto, E.; Komminaho, K.; Vaittinen, K.; Malinowski, M. Underground Vertical Seismic Profiling with Conventional and Fiber-Optic Systems for Exploration in the Kylylahti Polymetallic Mine, Eastern Finland. Minerals 2018, 8, 538. [Google Scholar] [CrossRef]
- Koistinen, T.J. Structural evolution of an early Proterozoic strata-bound Cu-Co-Zn deposit, Outokumpu, Finland. Earth Environ. Sci. Trans. R. Soc. Edinb. 1981, 72, 115–158. [Google Scholar] [CrossRef]
- Säntti, J.; Kontinen, A.; Sorjonen-Ward, P.; Johanson, B.; Pakkanen, L. Metamorphism and Chromite in Serpentinized and Carbonate-Silica-Altered Peridotites of the Paleoproterozoic Outokumpu-Jormua Ophiolite Belt, Eastern Finland. Int. Geol. Rev. 2006, 48, 494–546. [Google Scholar] [CrossRef]
- Peltonen, P.; Kontinen, A.; Huhma, H.; Kuronen, U. Outokumpu revisited: New mineral deposit model for the mantle peridotite-associated Cu-Co-Zn-Ni-Ag-Au sulphide deposits. Ore Geol. Rev. 2008, 33, 559–617. [Google Scholar] [CrossRef]
- Luhta, T. Petrophysical Properties of the Kylylahti Cu-Au-Zn Sulphide Mineralization and Its Host Rocks. Masters’ Thesis, University of Helsinki, Helsinki, Finland, 2019. [Google Scholar]
- Bedrock of Finland—DigiKP Digital Map Database, Version 2.1; Geological Survey of Finland: Espoo, Finland, 2019; Available online: https://gtkdata.gtk.fi/Kalliopera/index.html (accessed on 29 March 2019).
- Kontinen, A.; Peltonen, P.; Huhma, H. Description and Genetic Modelling of the Outokumpu-Type Rock Assemblage and Associated Sulphide Deposits; Final Technical Report for GEOMEX J.V., Workpackage “Geology”; Geological Survey of Finland: Espoo, Finland, 2006; Available online: http://tupa.gtk.fi/raportti/arkisto/m10_4_2006_1.pdf (accessed on 17 May 2019).
- Cheraghi, S.; Craven, J.A.; Bellefleur, G. Feasibility of virtual source reflection seismology using interferometry for mineral exploration: A test study in the Lalor Lake volcanogenic massive sulphide mining area, Manitoba, Canada. Geophys. Prospect. 2015, 63, 833–848. [Google Scholar] [CrossRef]
- Heinonen, S.; Malinowski, M.; Hloušek, F.; Gislason, G.; Buske, S.; Koivisto, E.; Wojdyla, M. Cost-Effective Seismic Exploration: 2D Reflection Imaging at the Kylylahti Massive Sulfide Deposit, Finland. Minerals 2019, 9, 263. [Google Scholar] [CrossRef]
- Schneider, W.A. Integral formulation for migration in two and three dimensions. Geophysics 1978, 43, 49–76. [Google Scholar] [CrossRef]
- Hloušek, F.; Hellwig, O.; Buske, S. Three-dimensional focused seismic imaging for geothermal exploration in crystalline rock near Schneeberg, Germany. Geophys. Prospect. 2015, 63, 999–1014. [Google Scholar] [CrossRef]
- Neidell, N.S.; Taner, M.T. Semblance and other Coherency measures for Multichannel data. Geophysics 1971, 36, 482–497. [Google Scholar] [CrossRef]
- Podvin, P.; Lecomte, I. Finite difference computation of traveltimes in very contrasted velocity models: A massively parallel approach and its associated tools. Geophys. J. Int. 1991, 105, 271–284. [Google Scholar] [CrossRef]
- Kukkonen, I.T.; Heinonen, S.; Heikkinen, P.J.; Sorjonen-Ward, P. Delineating ophiolite derived host rocks of massive sulfide Cu-Co-Zn deposits with 2D high-resolution seismic reflection data in Outokumpu, Finland. Geophysics 2012, 77, WC213–WC222. [Google Scholar] [CrossRef]
- Zelt, C.A.; Barton, P.J. 3D seismic refraction tomography: A comparison of two methods applied to data from the Faeroe basin. J. Geophys. Res. 1998, 103, 7187–7210. [Google Scholar] [CrossRef]
- Tryggvason, A.; Schmelzbach, C.; Juhlin, C. Traveltime tomographic inversion with simultaneous static corrections—Well worth the effort. Geophysics 2009, 74, WCB25–WCB33. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Parameters | |
|---|---|
| Recording System | OYO 1-Geospace GSR 2 |
| No. of Receiver Lines | 19 lines |
| Receiver Line Interval | 200 m |
| Receiver (group) Interval | 50 m |
| Number of Receivers | 994 |
| Survey Area | ~10.5 km2 |
| Geophones | 10 Hz (string of 6, bunched), GS-20 |
| Shot Spacing | 20–100 m |
| Number of Shot Points | 738 |
| CDP 3 Bin Size | 25 × 25 m |
| Explosive Source | 120–240 g charge in 2 m drilled hole or ditch |
| Vibroseis Source | 2 × INOVA 4 UniVibe trucks (9.5t) |
| Sweep Parameters/No. of Sweeps | 4–220 Hz, 16 s/3 (2D) 3–200 Hz, 20 s/2 (3D random) 30–220 Hz, 16 s/6, low force (VSP) 10–300 Hz, 10 s/6, low force (VSP) |
| Spread Configuration | Fixed spread, continuous recording |
| Record Length | 6 s |
| Sampling Interval | 2 ms |
| Process | Parameter |
|---|---|
| 1. First-Stage Processing Flow | |
| Data read | 3.0 s SEG–Y 1 data |
| Match Filter | Match dynamite to Vibroseis |
| Geometry | 3D, 25 × 25 m bins |
| Refraction Statics | 2-layer model, replacement velocity 5000 m/s |
| Fixed Datum | 100 m above sea level |
| Geometrical Spreading Compensation | v2t function |
| Amplitude Balance | Surface consistent, 0-2 s window |
| Notch Removal | 50/100 Hz |
| Deconvolution | Single Trace Predictive, filter length 80 ms–gap 14 ms |
| Airwave mute | 330 m/s |
| Band-pass Filter | 35-40-130-150 Hz |
| AGC 2 | 250 ms |
| Top Mute | 30 ms below V = 5500 m/s |
| 2a. First Approach | |
| Residual Statics Analysis | 3 passes |
| Velocity Analysis | 2 passes |
| NMO 3 corrections | with 2nd pass velocities |
| Top Mute | angle mute 35 degrees |
| Stack | Sqrt-fold normalization |
| 2b. Second Approach | |
| DMO corrections | 3D Kirchhoff DMO |
| Velocity analysis | 1 pass |
| Top mute | angle mute 35 degree |
| Stack | Sqrt-fold normalization |
| 3. Migration and Post-Processing | |
| Migration | 3D Stolt, V = 5400 m/s |
| Coherency Filter | F-XY Decon. 3IL × 3XL 100 ms window |
| Band-pass Filter | 20-30-95-105 Hz |
| Trace Balance | Whole Trace Balance |
| Resampling | 4 ms |
| Time-Depth Conversion | V = 5400 m/s or tomography |
| Output Data | SEG-Y |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, B.; Malinowski, M.; Hloušek, F.; Koivisto, E.; Heinonen, S.; Hellwig, O.; Buske, S.; Chamarczuk, M.; Juurela, S. Sparse 3D Seismic Imaging in the Kylylahti Mine Area, Eastern Finland: Comparison of Time Versus Depth Approach. Minerals 2019, 9, 305. https://doi.org/10.3390/min9050305
Singh B, Malinowski M, Hloušek F, Koivisto E, Heinonen S, Hellwig O, Buske S, Chamarczuk M, Juurela S. Sparse 3D Seismic Imaging in the Kylylahti Mine Area, Eastern Finland: Comparison of Time Versus Depth Approach. Minerals. 2019; 9(5):305. https://doi.org/10.3390/min9050305
Chicago/Turabian StyleSingh, Brij, Michał Malinowski, Felix Hloušek, Emilia Koivisto, Suvi Heinonen, Olaf Hellwig, Stefan Buske, Michał Chamarczuk, and Sanna Juurela. 2019. "Sparse 3D Seismic Imaging in the Kylylahti Mine Area, Eastern Finland: Comparison of Time Versus Depth Approach" Minerals 9, no. 5: 305. https://doi.org/10.3390/min9050305