


An Improved Python-Based Image Processing Algorithm for Flotation Foam Analysis

 ,
,
Abstract
:1. Introduction
2. Error Analysis and Characterization of Flotation Foam Images
2.1. Factors Influencing the Flotation Foam
2.2. Compensation of Machine Vision Errors during the Flotation Process
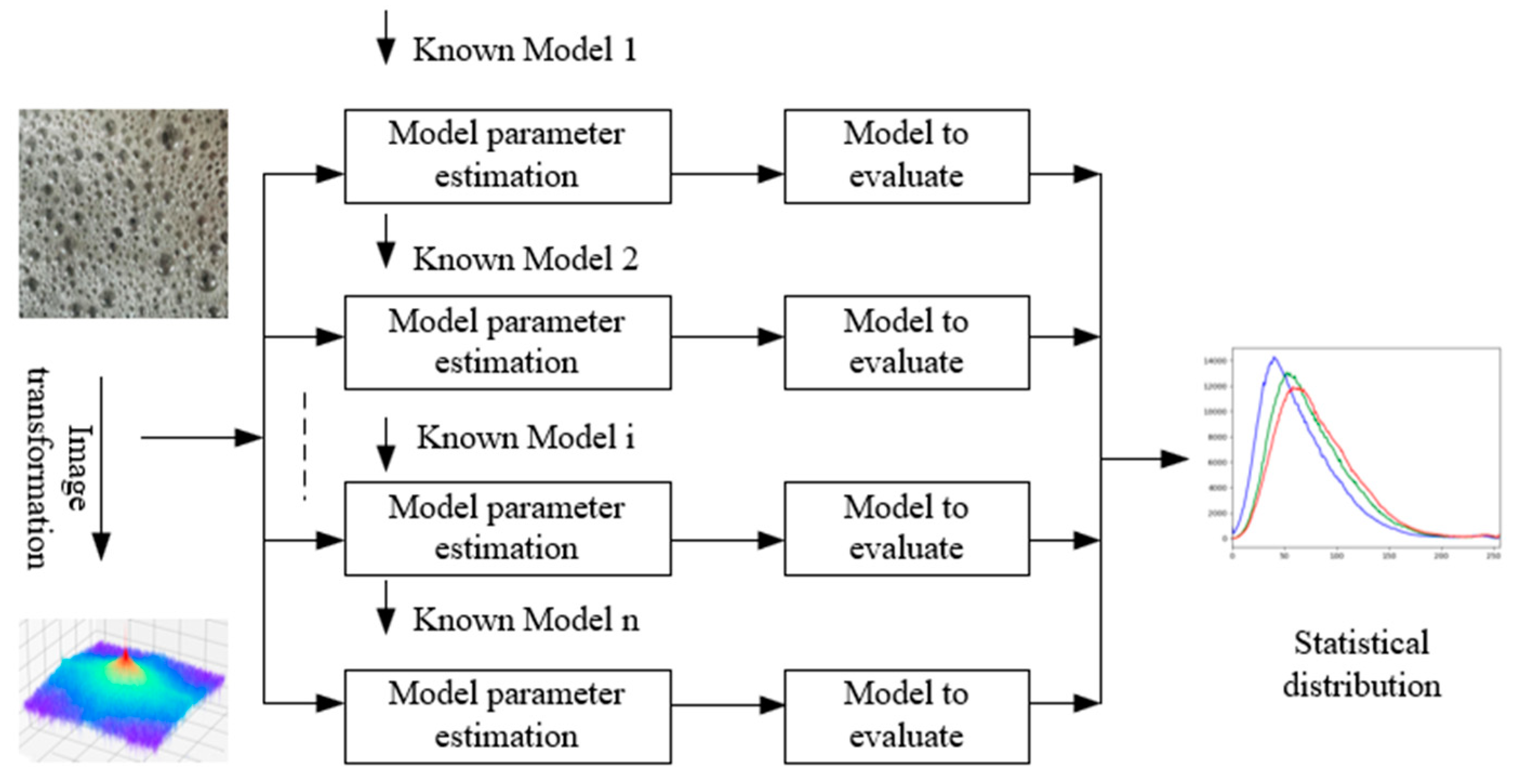
2.2.1. Model Definition for Machine Vision Image Recognition
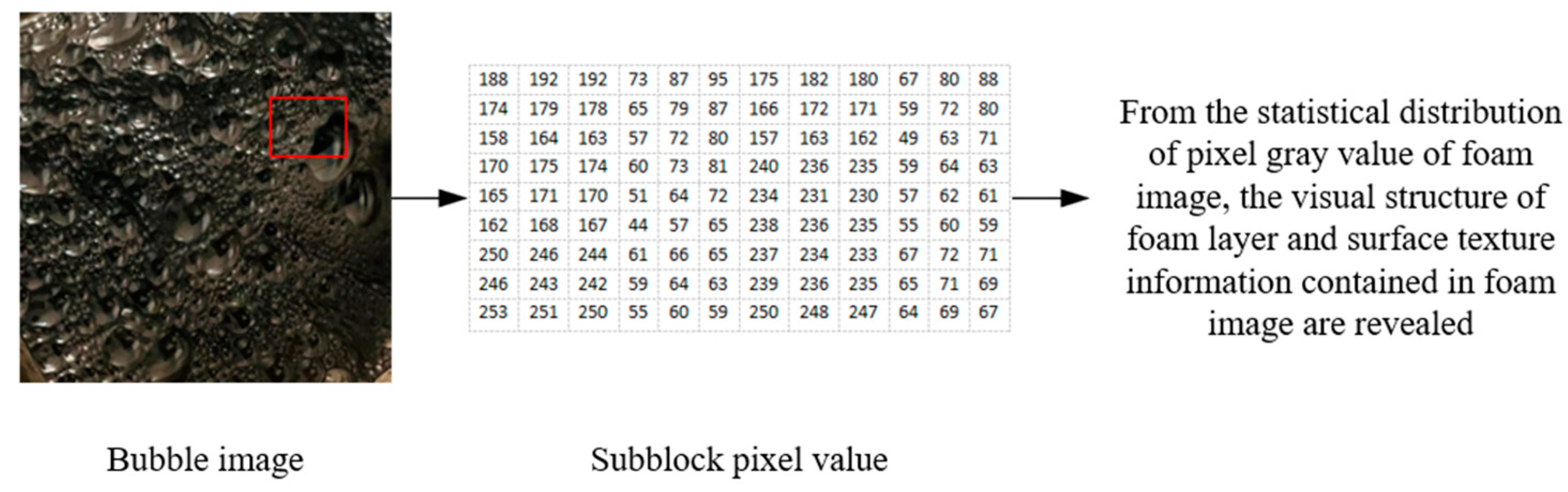
2.2.2. General Principle for Statistical Analysis of Flotation Foam Images
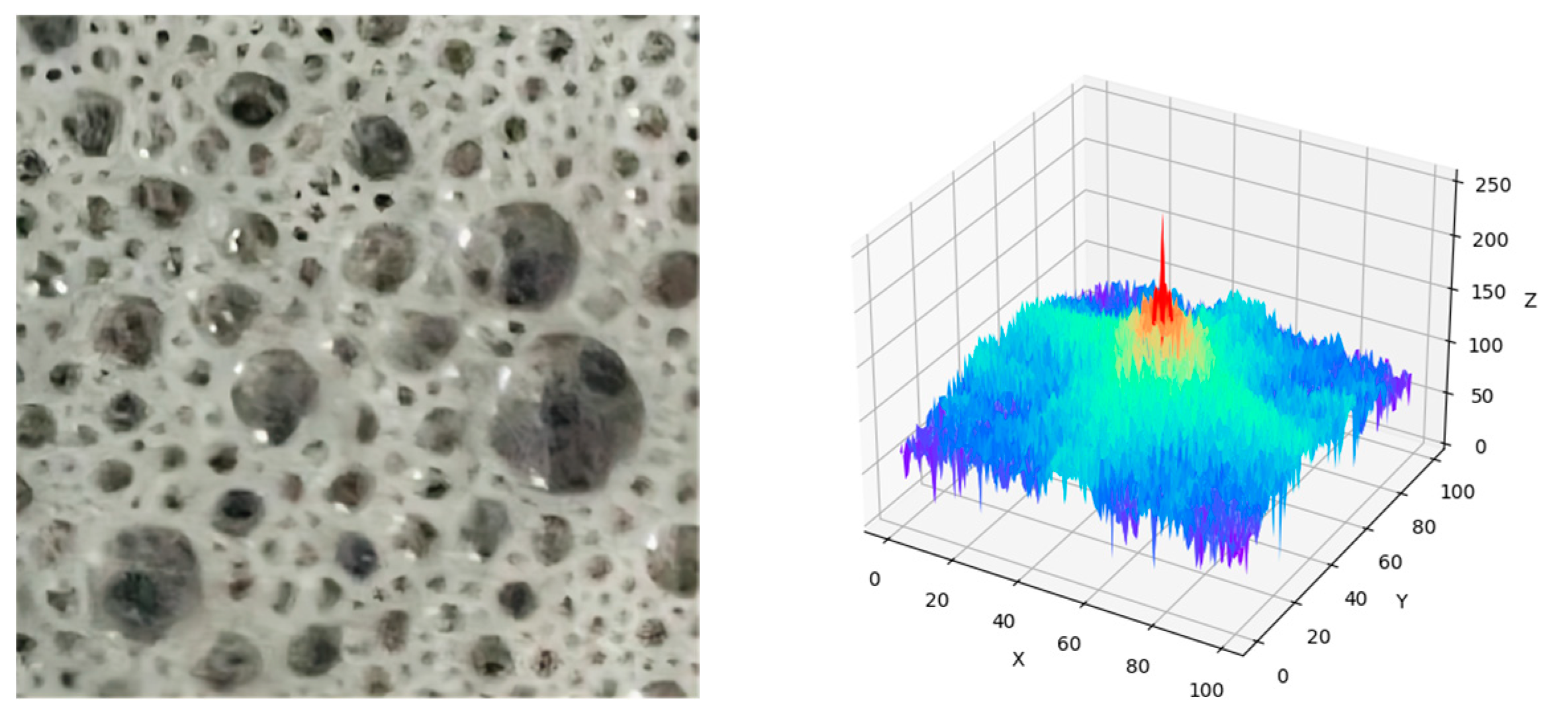
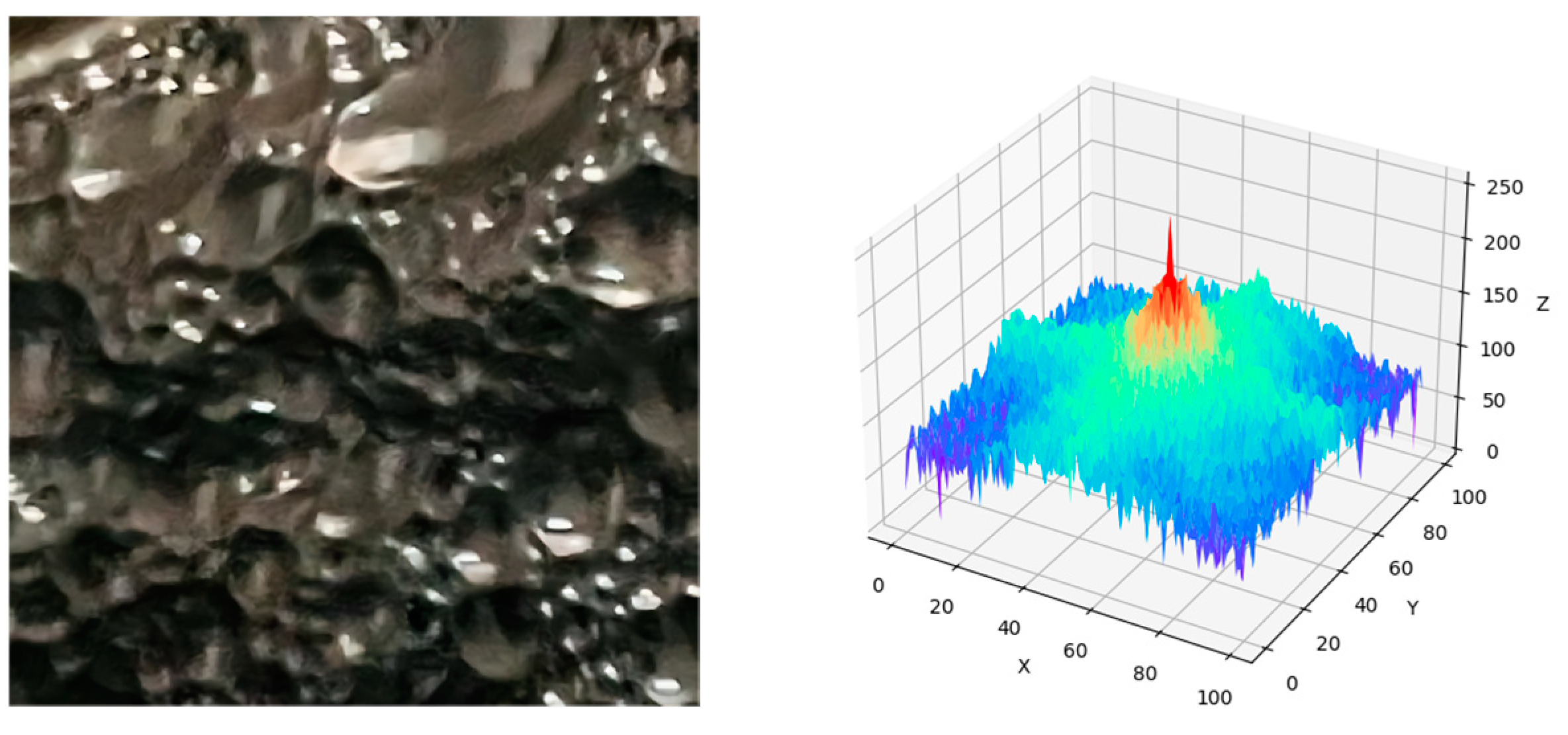
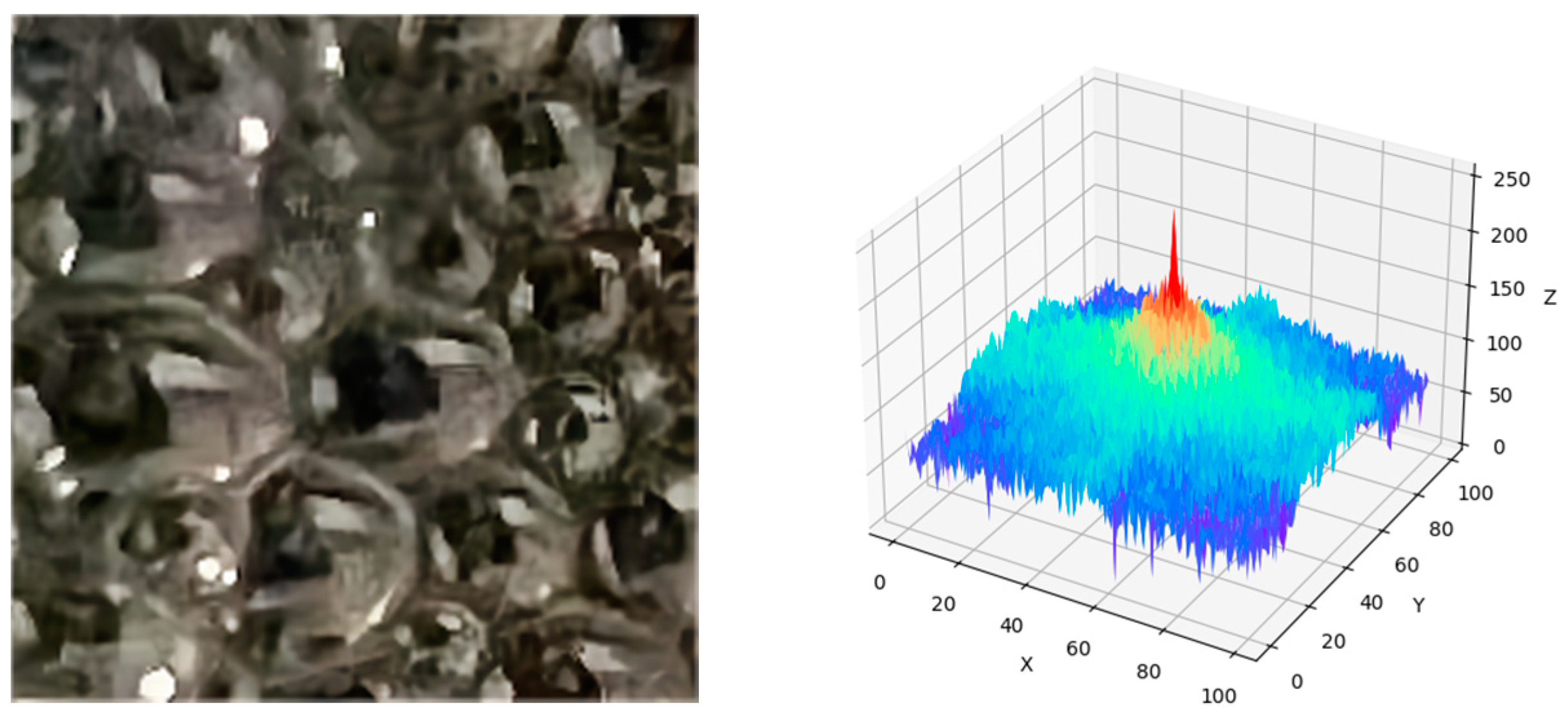
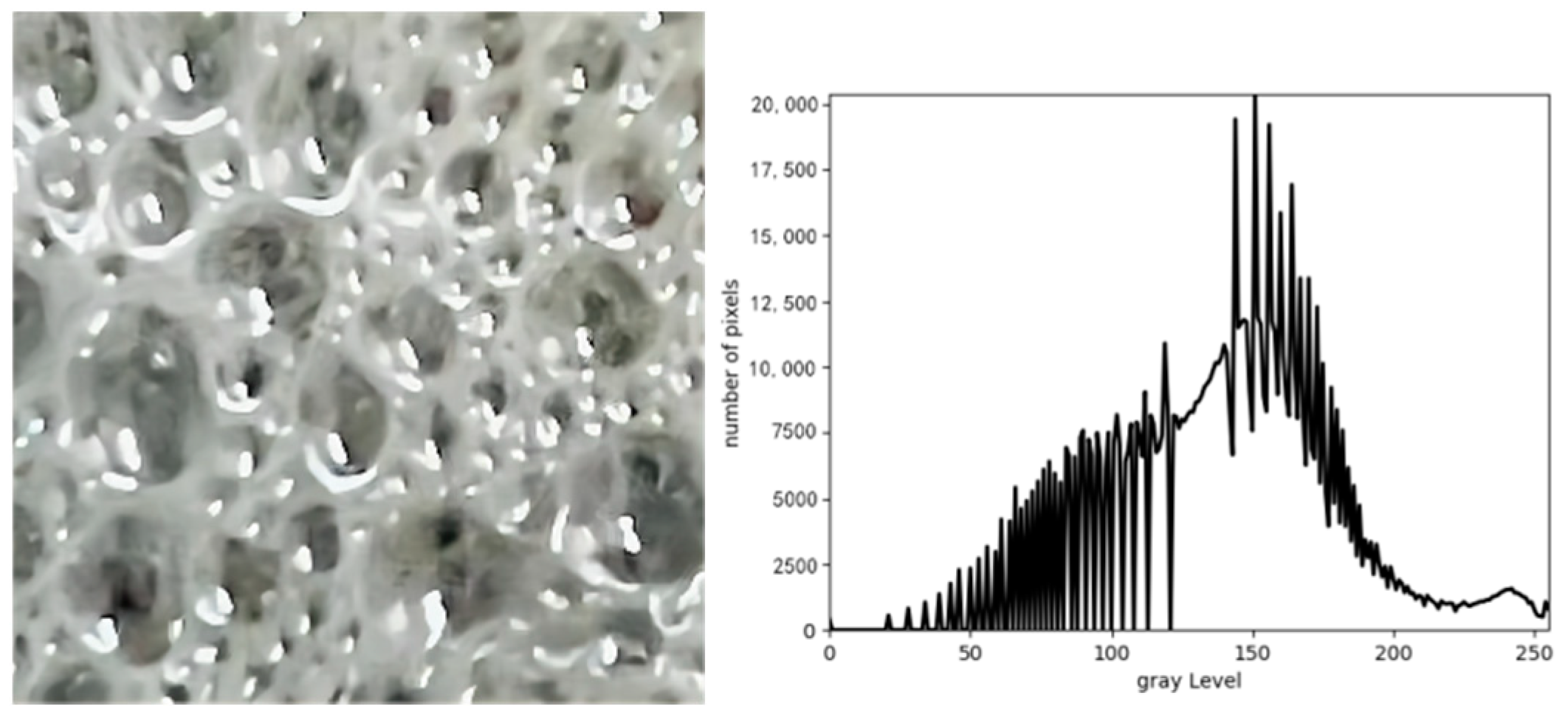
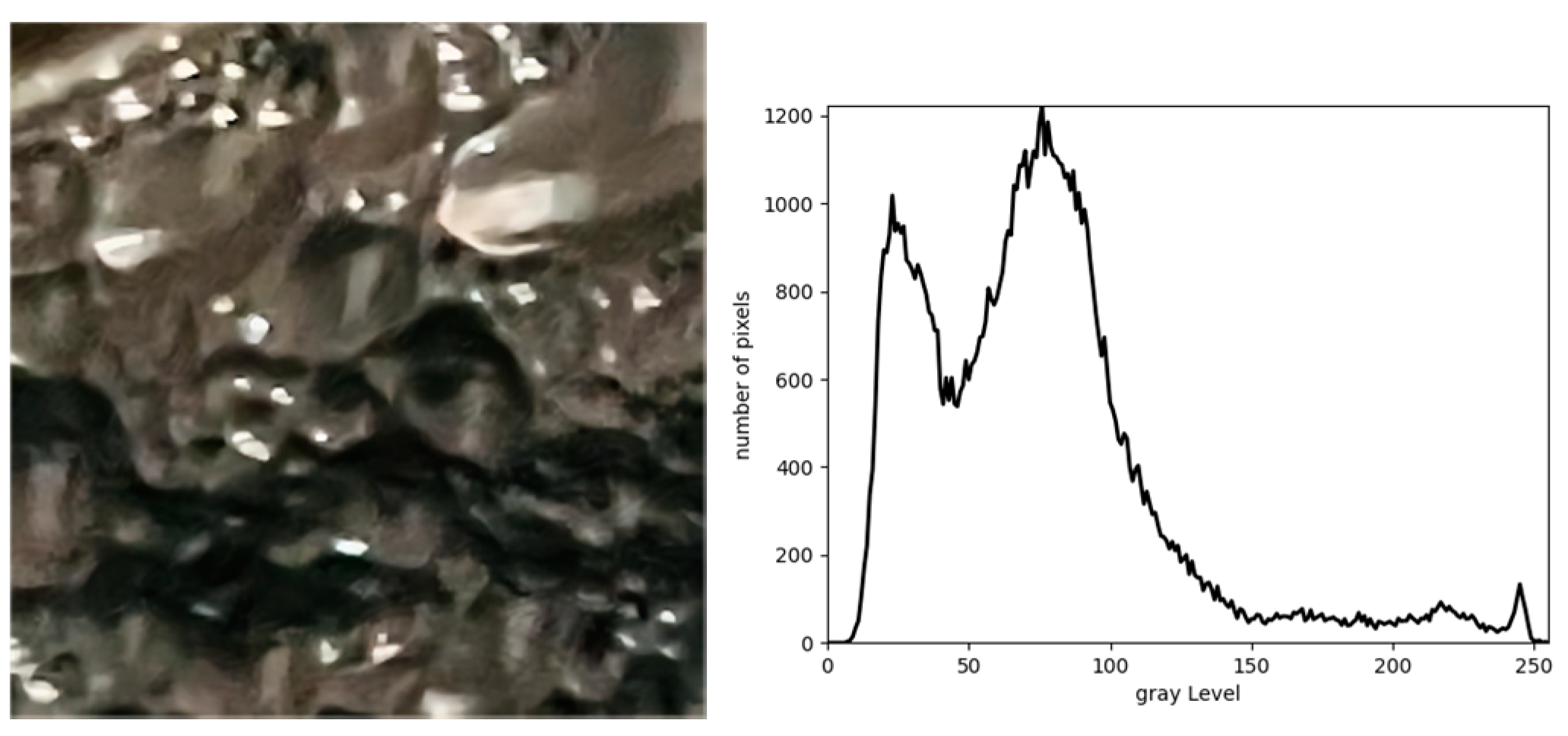
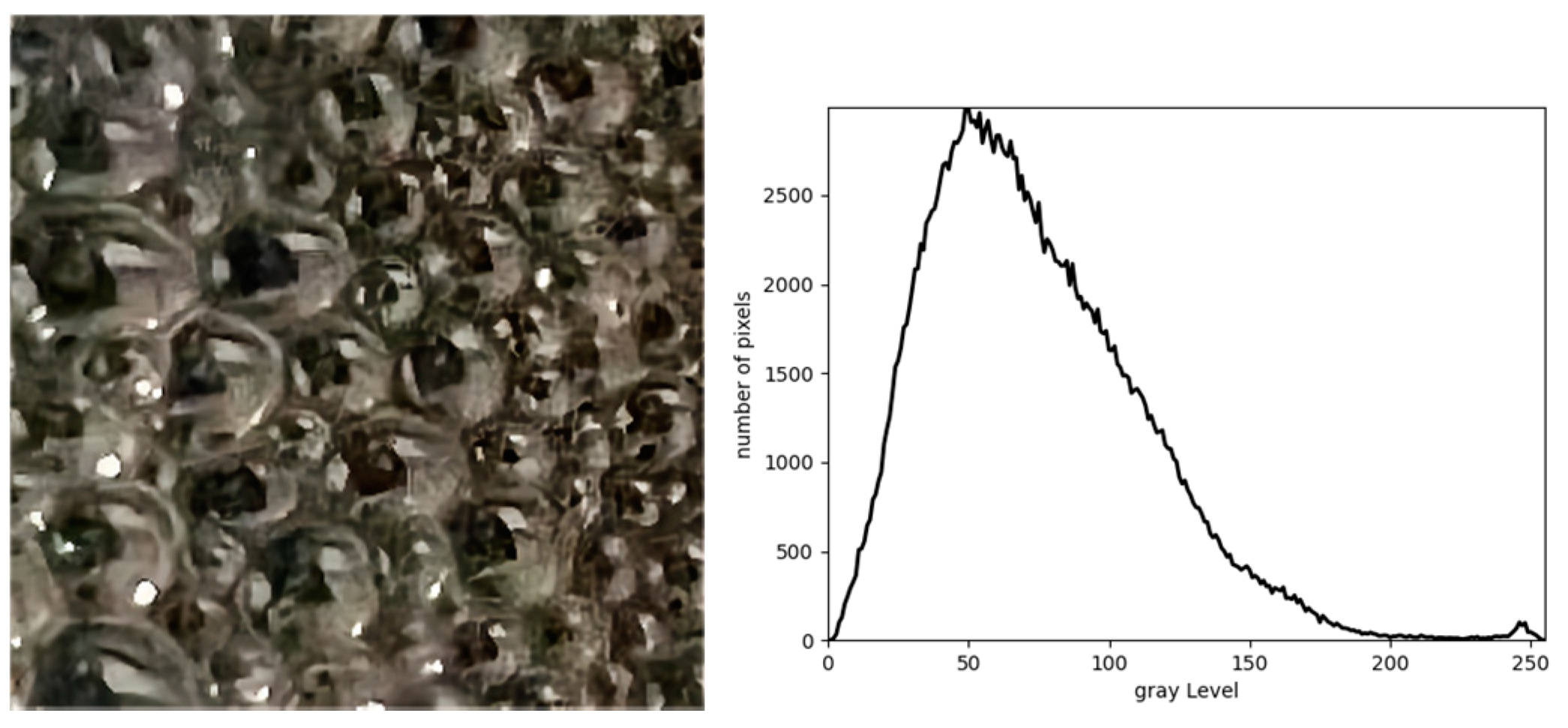
2.2.3. Flotation Foam Image Spectrum Characteristics
2.2.4. Retinex Image Compensation
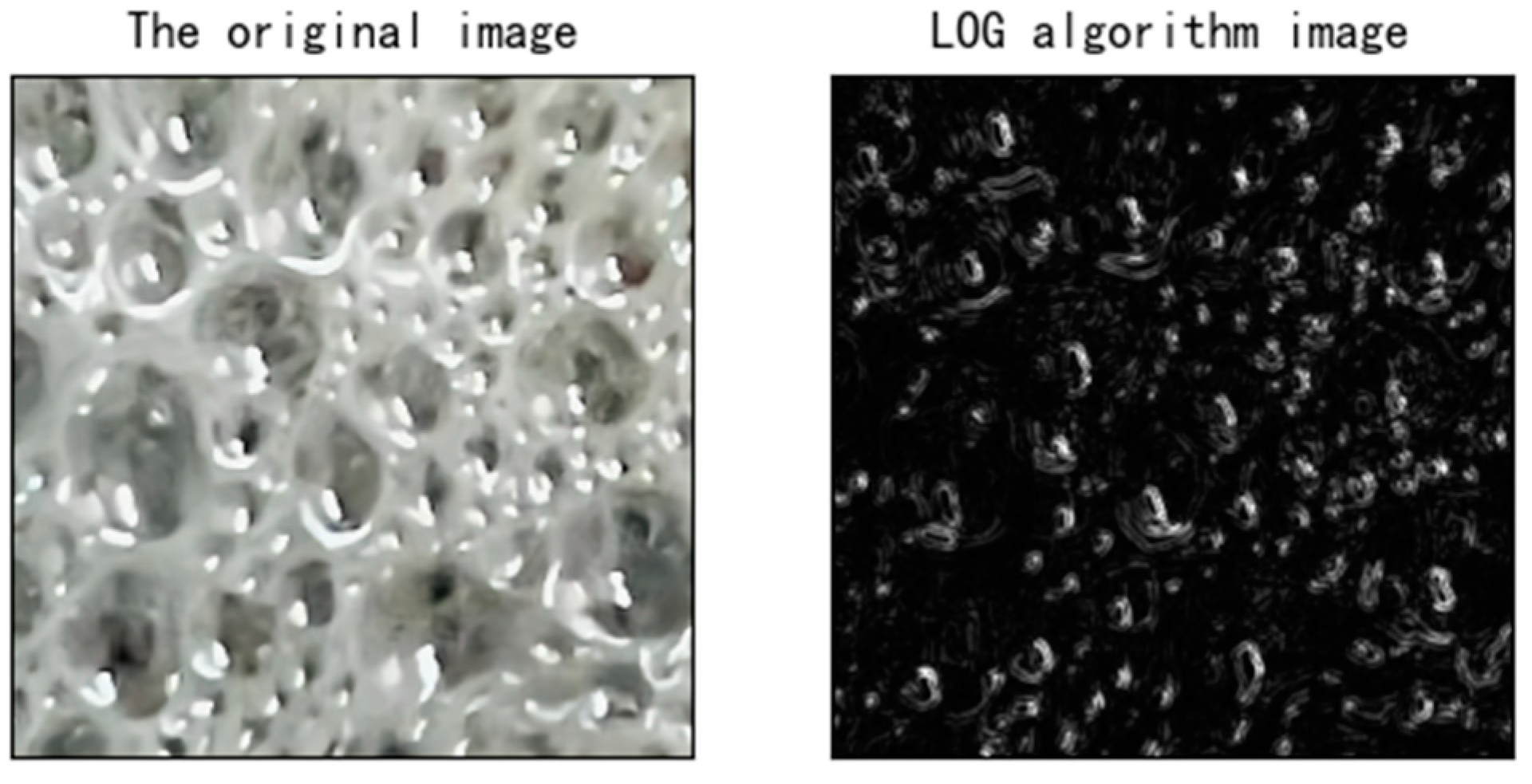
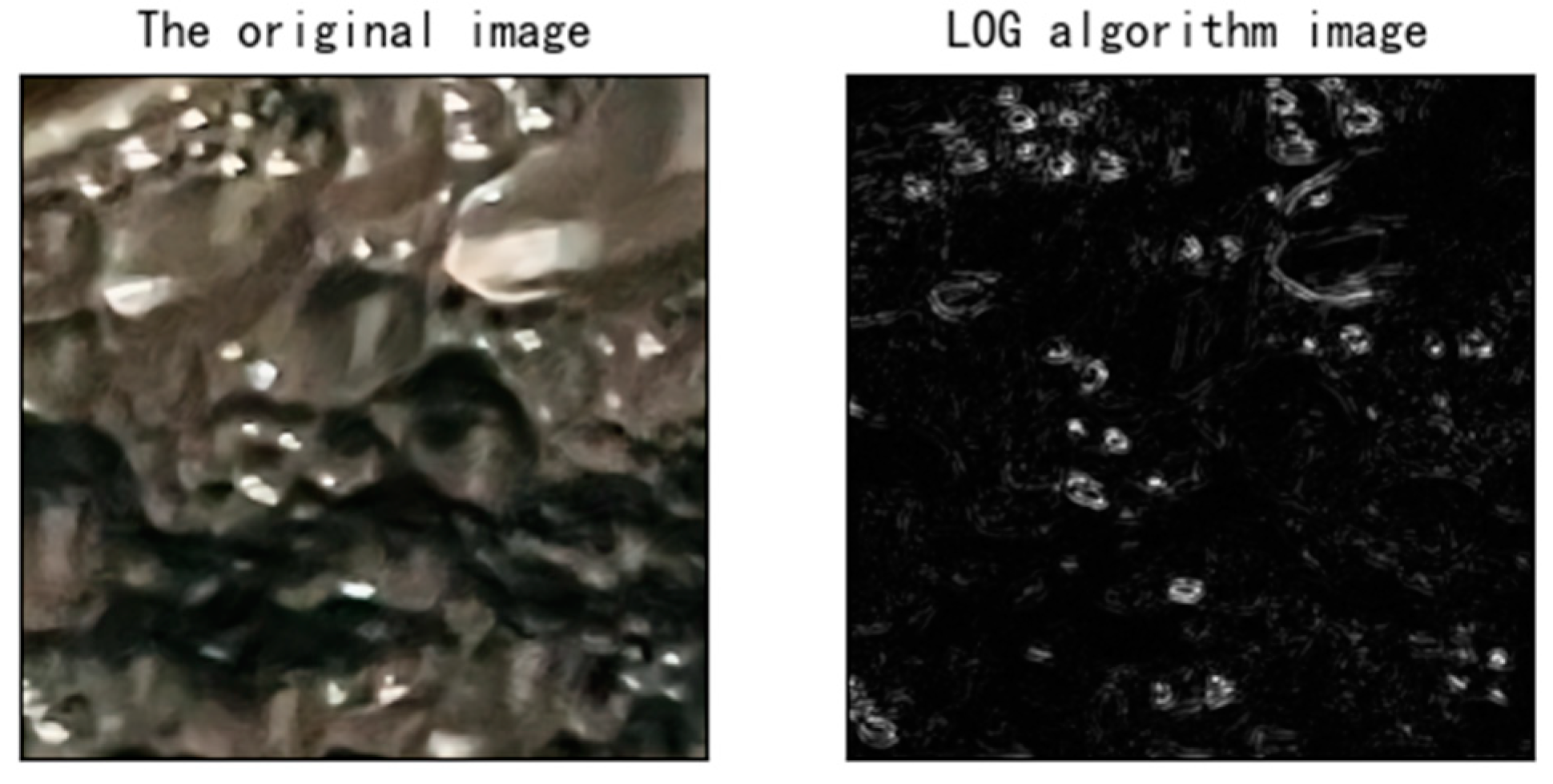
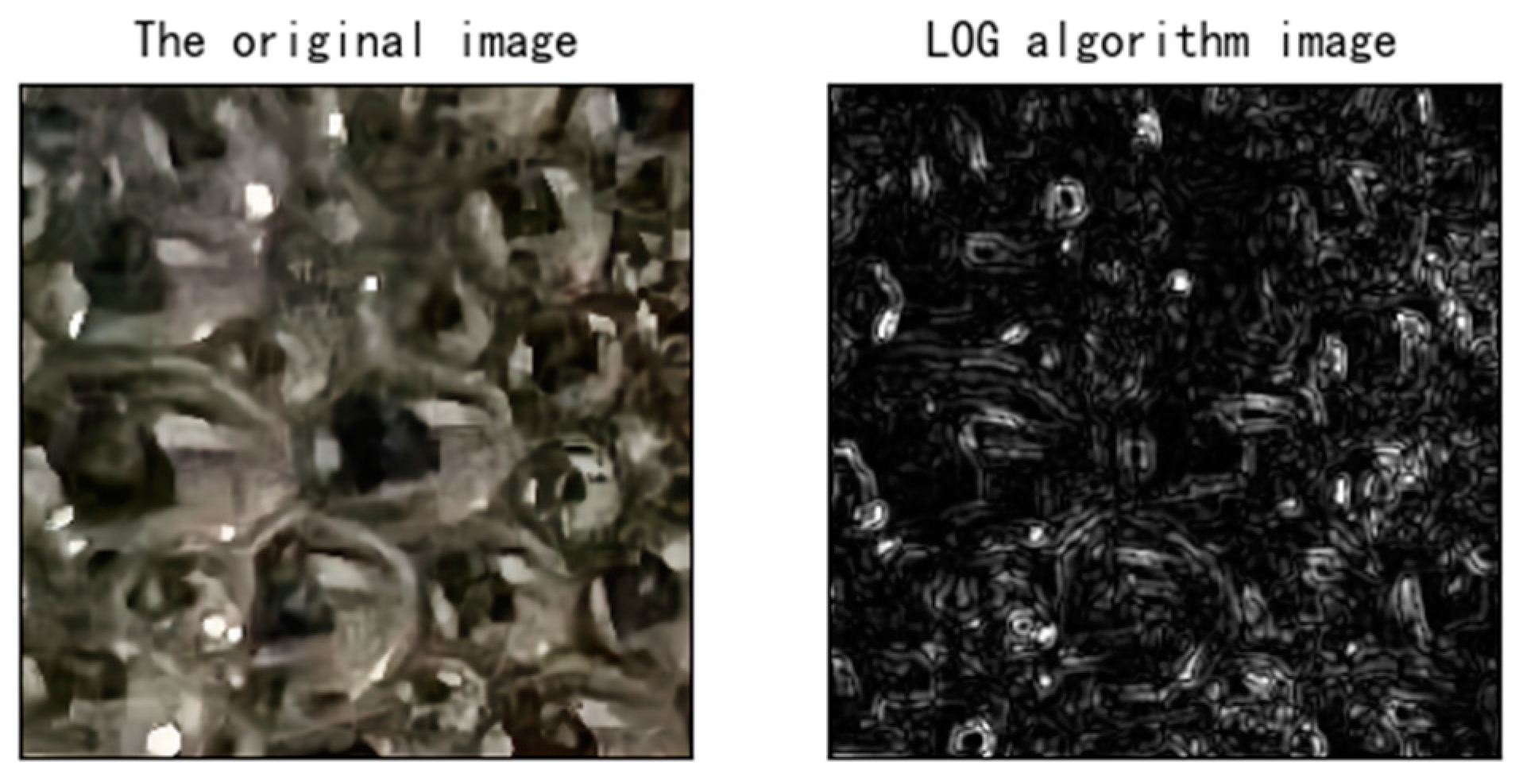
2.2.5. The LoG Edge Detection Operator
- (1)
- Image Smoothing
- (2)
- Image Enhancement
- (3)
- Edge Detection
2.3. Screening and Analysis of Factors Influencing the Flotation Process
2.3.1. Image Preprocessing
- (1)
- Grayscale Transformation
- (2)
- Gray-Level Histogram
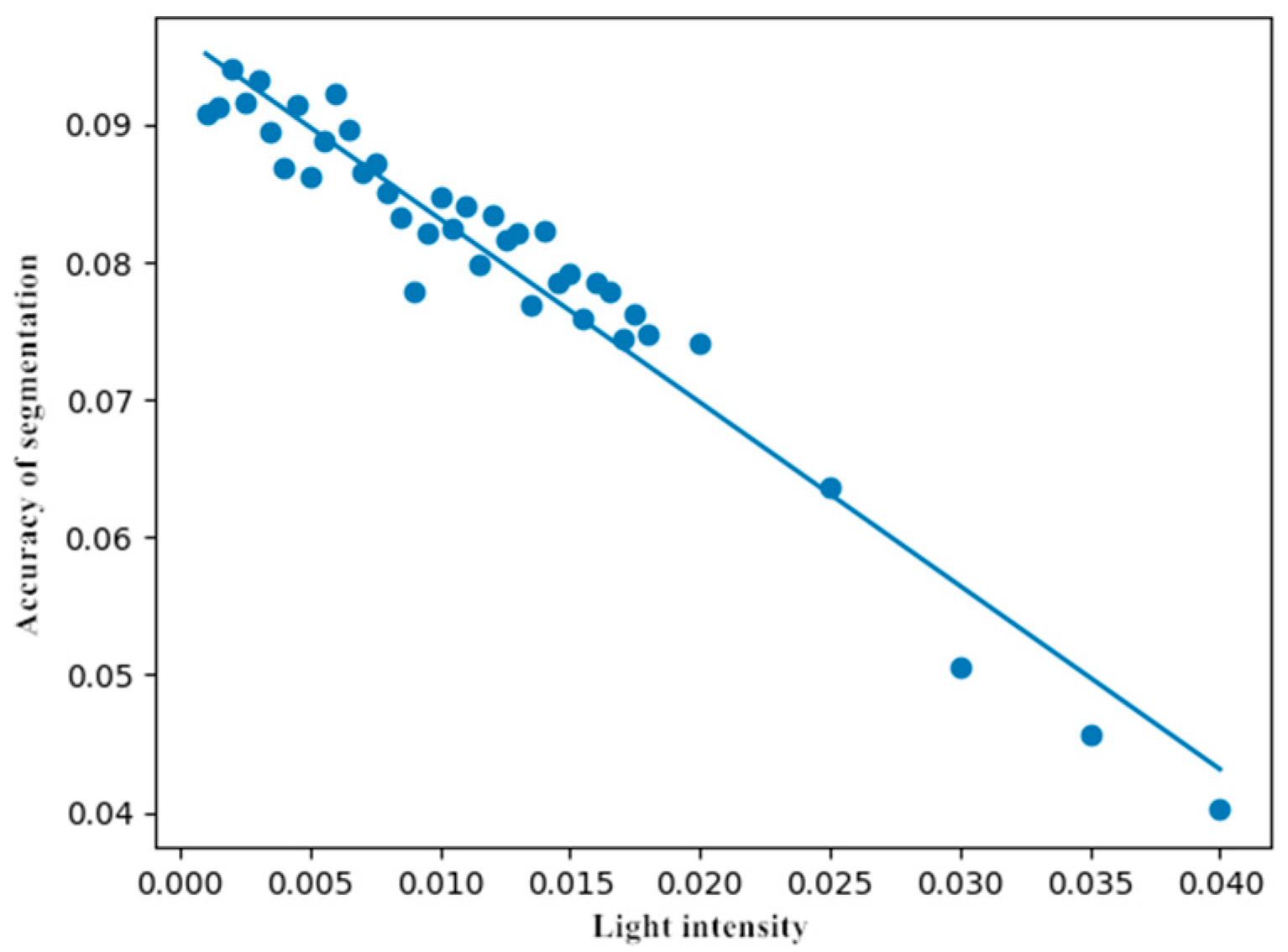
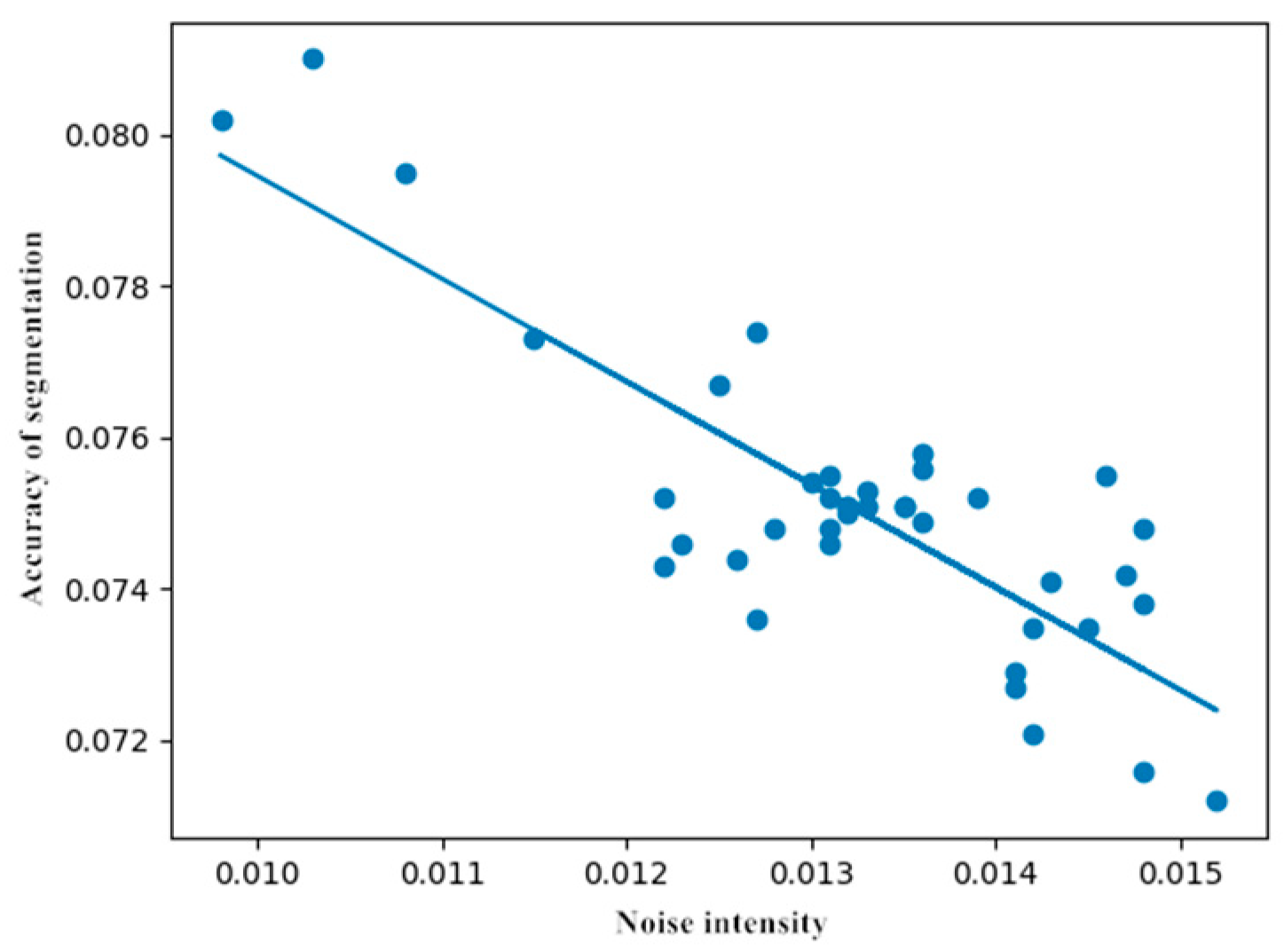
2.3.2. Linear Regression Model for Factors Influencing the Flotation Process
3. Improvement of the Watershed Segmentation Algorithm Using the OpenCV Library
3.1. The OpenCV Watershed Segmentation Algorithm
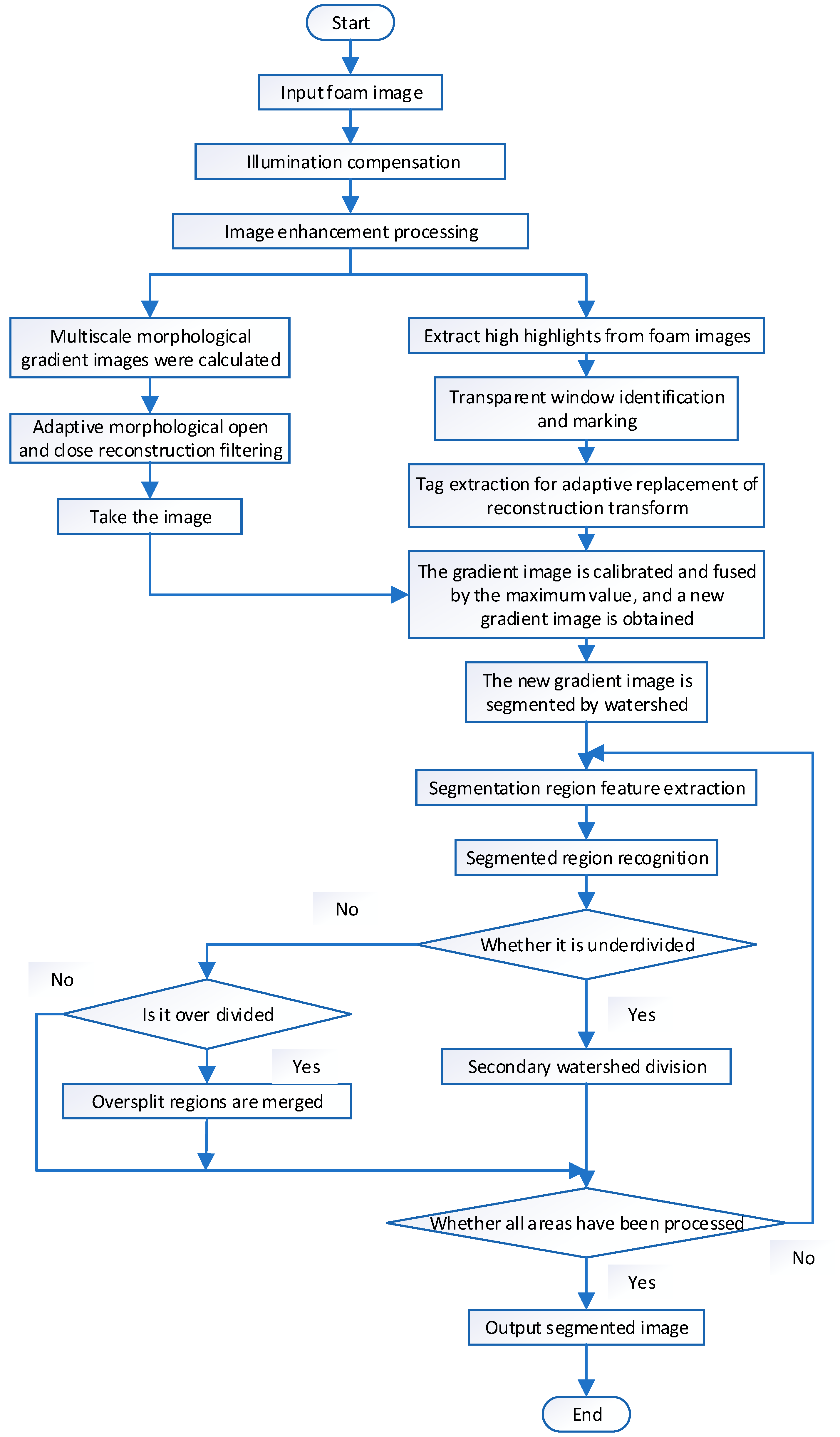
3.2. Flow Improvement for the OpenCV Watershed Segmentation Algorithm
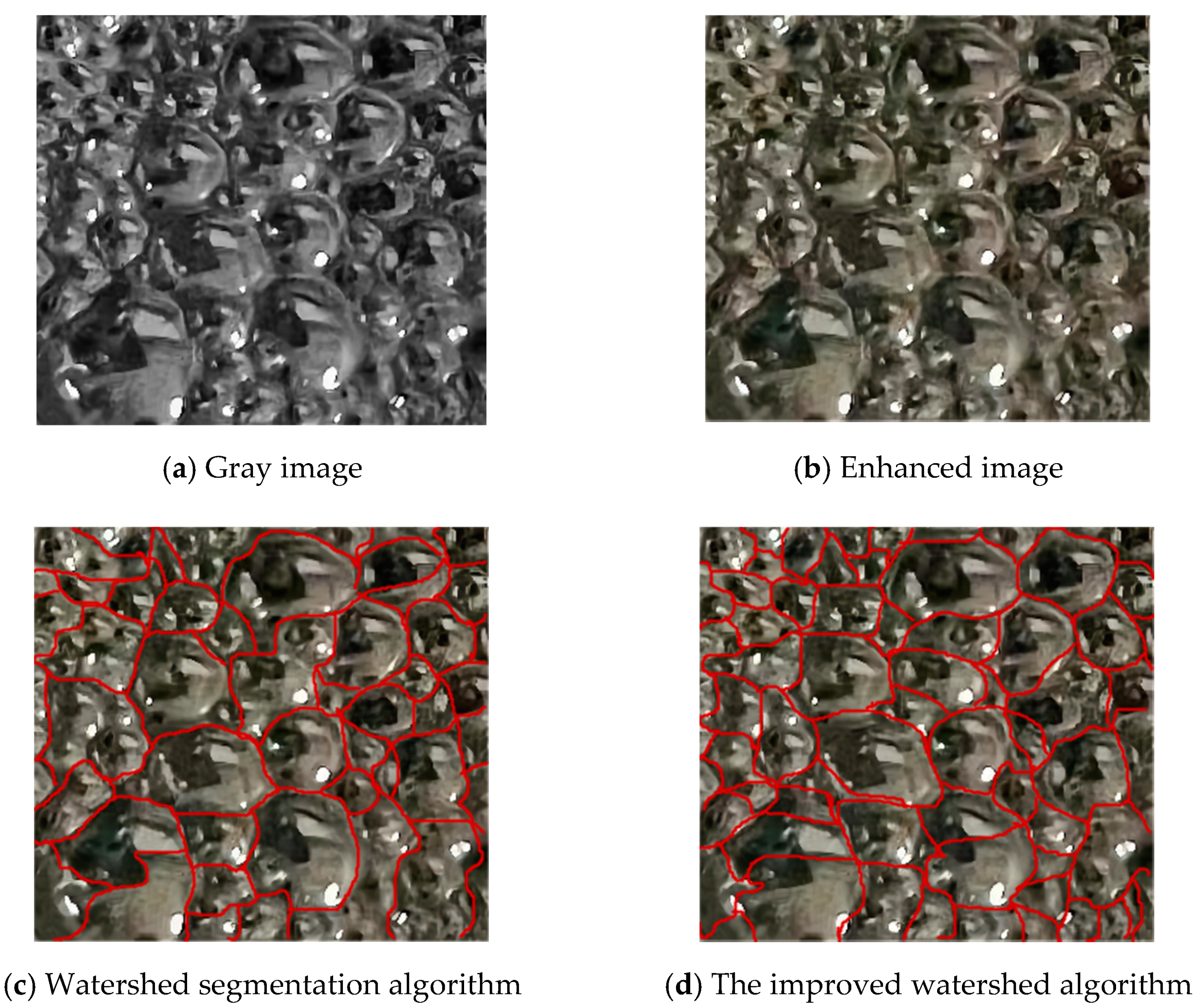
3.3. Comparison of Experimental Results from Segmentation Simulations
3.4. Statistical Analysis of the Segmentation Simulation Results
4. Conclusions
- (1)
- First, the flotation foam images were enhanced with the Retinex image compensation method—also implemented in a Python module. Strong-contrast area recognition and illumination compensation of the flotation foam image were improved, with a better visual result and more possibilities to extract useful details from the foam image.
- (2)
- A linear regression model was developed, also in Python, to analyze major factors influencing the segmentation accuracy. Application of the model to light and noise intensity showed that both factors had an influence on flotation foam segmentation, larger for light intensity.
- (3)
- The improved version of the OpenCV watershed segmentation algorithm proposed in this paper, also written in Python, yielded better results than the standard version. Segmentation time was 3.3% shorter and segmentation accuracy increased by 9.9%. Comparison with results from the standard watershed algorithm and from manual segmentation showed that the proposed algorithm is accurate and robust.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Beneventi, D.; Benesse, M.; Carré, B.; Saint Amand, F.J.; Salgueiro, L. Modelling Deinking Selectivity in Multistage Flotation Systems. Sep. Purif. Technol. 2007, 54, 77–87. [Google Scholar] [CrossRef]
- Bergh, L.; Yianatos, J. The Long Way Toward Multivariate Predictive Control of Flotation Processes. J. Process Control 2011, 21, 226–234. [Google Scholar] [CrossRef]
- Aldrich, C.; Marais, C.; Shean, B.; Cilliers, J. Online Monitoring and Control of Froth Flotation Systems with Machine Vision: A Review. Int. J. Miner. Process. 2010, 96, 1–13. [Google Scholar] [CrossRef]
- Moolman, D.W.; Eksteen, J.J.; Aldrich, C.; Van Deventer, J.S.J. The Significance of Flotation Froth Appearance for Machine Vision control. Int. J. Miner. Process. 1996, 48, 135–158. [Google Scholar] [CrossRef]
- Bonifazi, G.; Serranti, S.; Volpe, F.; Zuco, R. Characterisation of flotation froth colour and structure by machine vision. Comput. Geosci. 2001, 27, 1111–1117. [Google Scholar] [CrossRef]
- Shean, B.; Cilliers, J. A Review of Froth Flotation Control. Int. J. Miner. Process. 2011, 100, 57–71. [Google Scholar] [CrossRef]
- Kaartinen, J.; Hätönen, J.; Hyötyniemi, H.; Miettunen, J. Machine-Vision-Based Control of Zinc Flotation—A Case Study. Control Eng. Pract. 2006, 14, 1455–1466. [Google Scholar] [CrossRef]
- Van Brown, O.; Bourke, R.J.A. Improving Flotation Plant Performance at Cadia by Controlling and Optimising the Rate of Froth Recovery Using Outokumpu Frothmaster. Australas. Inst. Min. 2000, 6, 127–135. [Google Scholar]
- Bonifazi, G.; Giancontieri, V.; Meloni, A.; Serranti, S.; Volpe, F.; Zuco, R.; Koivo, H.; Hätönen, J.; Hyötyniemi, H.; Niemi, A.; et al. Characterization of the Flotation Froth Structure and Color by Machine Vision (ChaCo). Dev. Miner. Process. 2000, 13, C8a–39. [Google Scholar]
- Wang, W.X.; Stephansson, O.; Wan, S.C. On-Line System Setup in a Cellar of a Flotation Plant. In Proceedings of the 15th International Conference on Pattern Recognition. ICPR-2000, Barcelona, Spain, 3–7 September 2000; Volume 4, pp. 791–794. [Google Scholar]
- Wang, W.; Stephansson, O.A. Robust Bubble Delineation Algorithm for Froth Images. In Proceedings of the Second International Conference on Intelligent Processing and Manufacturing of Materials. IPMM’99 (Cat. No.99EX296), Honolulu, HI, USA, 10–15 July 1999; Volume 1, pp. 471–476. [Google Scholar]
- Citir, C.; Aktas, Z.; Berber, R. Off-Line Image Analysis for Froth Flotation of Coal. Comput. Chem. Eng. 2004, 28, 625–632. [Google Scholar] [CrossRef]
- Sadr-Kazemi, N.; Cilliers, J. An Image Processing Algorithm for Measurement of Flotation Froth Bubble Size and Shape Distributions. Miner. Eng. 1997, 10, 1075–1083. [Google Scholar] [CrossRef]
- Forbes, G.; De Jager, G. Texture Measures for Improved Watershed Segmentation of Froth Images. In Fifteenth Annual Symposium of the Pattern Recognition Association of South Africa; OpenUCT: Cape Town, South Africa, 2004; pp. 1–6. [Google Scholar]
- Zhang, H.; Tang, Z.; Xie, Y.; Gao, X.; Chen, Q. A Watershed Segmentation Algorithm Based on an Optimal Marker for Bubble Size Measurement. Measurement 2019, 138, 182–193. [Google Scholar] [CrossRef]
- Lézoray, O.; Charrier, C. Color Image Segmentation Using Morphological Clustering and Fusion with Automatic Scale Selection. Pattern Recognit. Lett. 2009, 30, 397–406. [Google Scholar] [CrossRef]
- Marais, C.; Aldrich, C. Estimation of Platinum Flotation Grades from Froth Image Data. Miner. Eng. 2011, 24, 433–441. [Google Scholar] [CrossRef]
- Henry, T.; Ngan, Y.; Grantham, H.; Pang, K.; Nelson, C. Computing, Automated fabric defect detection—A Review. Image Vis. Comput. 2011, 29, 442–458. [Google Scholar]
- Bask, M.; Johansson, A. Robust Time-Varying Thresholds for Supervision of Valves in a Flotation Process. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004. [Google Scholar]
- Liu, J.J.; MacGregor, J.F. Froth-Based Modeling and Control of Flotation Processes. Miner. Eng. 2008, 21, 642–651. [Google Scholar] [CrossRef]
- Kim, J.; Fisher, J.; Yezzi, A.; Cetin, M.; Willsky, A. A Nonparametric Statistical Method for Image Segmentation Using Information Theory and Curve Evolution. IEEE Trans. Image Process. 2005, 14, 1486–1502. [Google Scholar] [CrossRef]
- Torralba, A.; Oliva, A. Statistics of Natural Image Categories. Netw. Comput. Neural Syst. 2003, 14, 391. [Google Scholar] [CrossRef]
- Land, E.H. An Alternative Technique for the Computation of the Designator in the Retinex Theory of Color Vision. Proc. Natl. Acad. Sci. USA 1986, 83, 3078–3080. [Google Scholar] [CrossRef]
- Kimmel, R.; Elad, M.; Shaked, D.; Keshet, R.; Sobel, I. A Variational Framework for Retinex. Int. J. Comput. Vis. 2003, 52, 7–23. [Google Scholar] [CrossRef]
- Hao, W.; He, M.; Ge, H.; Wang, C.-J.; Gao, Q.-W. Retinex-Like Method for Image Enhancement in Poor Visibility Conditions. Procedia Eng. 2011, 15, 2798–2803. [Google Scholar] [CrossRef]
- Swami, A.; Jain, R.J. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2013, 12, 2825–2830. [Google Scholar]
- Güney, Y.; Bozdogan, H.; Arslan, O. Robust Model Selection in Linear Regression Models Using Information Complexity. J. Comput. Appl. Math. 2021, 398, 113679. [Google Scholar] [CrossRef]
- A Full Color Digital Imaging Based Approach to Characterize Flotation Froth: An Experience in Pyhasalmi (SF) and Garpenberg (S)Plants. In In Proceedings of the Beijing International Conference on Imaging Technology and Applications in the 21st Century, Beijing, China, 23–26 May 2005.
- Luo, J.; Tang, Z.; Zhang, H.; Fan, Y.; Xie, Y. LTGH: A Dynamic Texture Feature for Working Condition Recognition in the Froth Flotation. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Kuo, B.-C.; Huang, W.-C.; Liu, H.-C.; Tseng, S.-C. A Novel Fuzzy C-Means Method for Hyperspectral Image Classification. IEEE Int. Geosci. Remote Sens. Symp. 2008, 2, II-1002–II-1005. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation Variable Description | Bubble Characteristics |
|---|---|
| The amount of foaming agent is large | Bubbles are small and bubbles are stable |
| Small amount of foaming agent | Bubbles are large and bubbles are unstable |
| The more inhibitor | The bubbles are small and round, and the foam load is small |
| The less inhibitor | Bubbles are large, elliptic, sticky and slow moving |
| The pH value of the pulp increases | Bubble increase |
| The pH value of the pulp decreases | Bubble decreases |
| High pulp concentration | The bubbles are large, elliptic, slow moving and high bearing rate |
| Low pulp concentration | The bubbles are small, round and unstable |
| Air pressure is high | The bubbles are large, elliptic, fast and low mineralization |
| Air pressure is down | Bubbles are small, round, slow and highly mineralization |
| Influence Factor | Coefficient of Determination | Coefficient of Association |
|---|---|---|
| Noise intensity | 0.6764 | −0.7639 |
| Light intensity | 0.9431 | −0.9169 |
| Algorithm | Mean Split Time (s) | Average Segmentation Accuracy (%) |
|---|---|---|
| Watershed algorithm | 5.863 | 88.73 |
| Improved watershed algorithm | 5.285 | 92.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Liu, D.; Wang, C.; Liu, R.; Wang, D.; Yu, L.; Wen, S. An Improved Python-Based Image Processing Algorithm for Flotation Foam Analysis. Minerals 2022, 12, 1126. https://doi.org/10.3390/min12091126
Zhang W, Liu D, Wang C, Liu R, Wang D, Yu L, Wen S. An Improved Python-Based Image Processing Algorithm for Flotation Foam Analysis. Minerals. 2022; 12(9):1126. https://doi.org/10.3390/min12091126
Chicago/Turabian StyleZhang, Wenkang, Dan Liu, Chunjing Wang, Ruitao Liu, Daqian Wang, Longzhou Yu, and Shuming Wen. 2022. "An Improved Python-Based Image Processing Algorithm for Flotation Foam Analysis" Minerals 12, no. 9: 1126. https://doi.org/10.3390/min12091126