3.1. Validation of Force Measurements
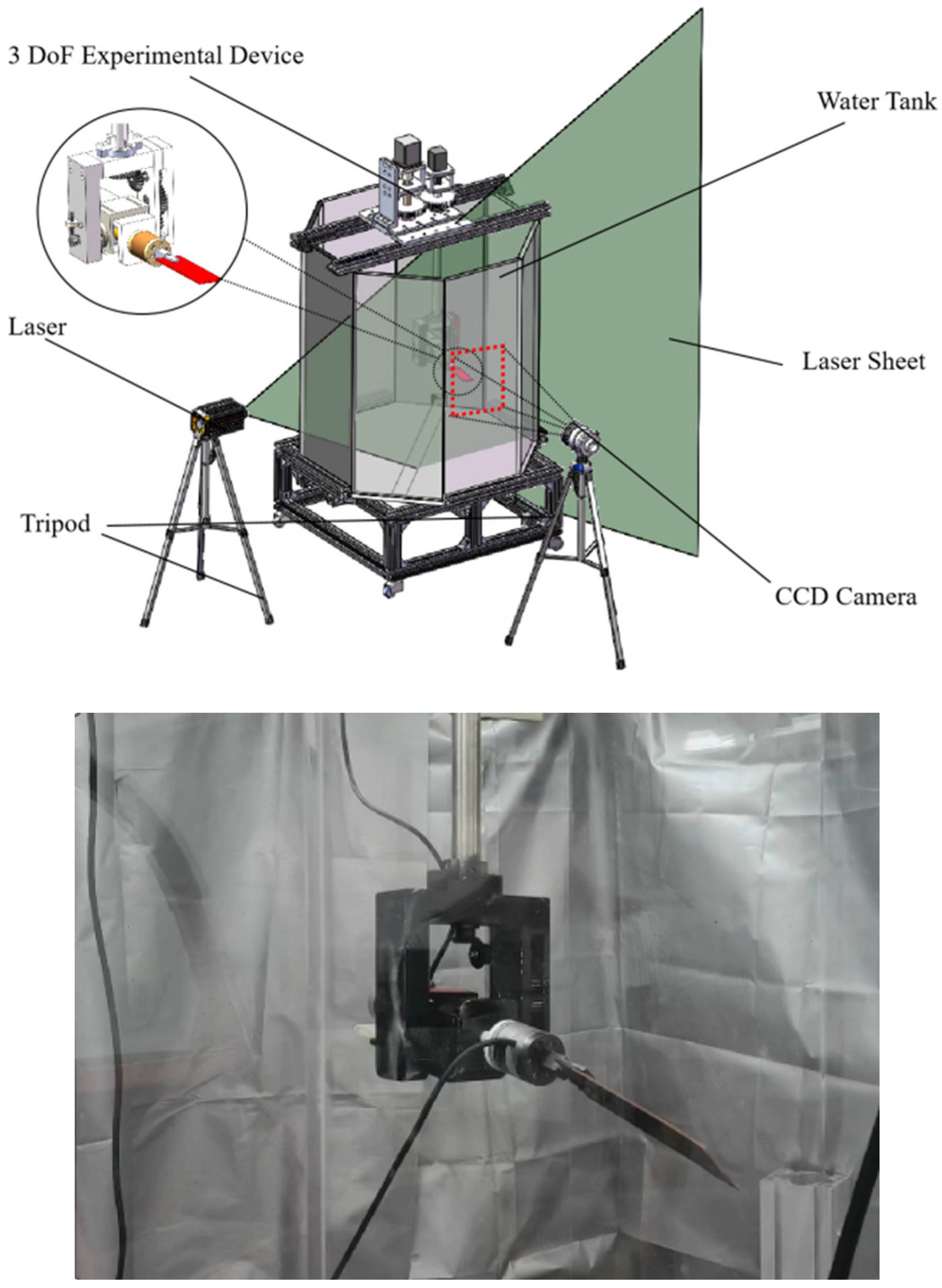
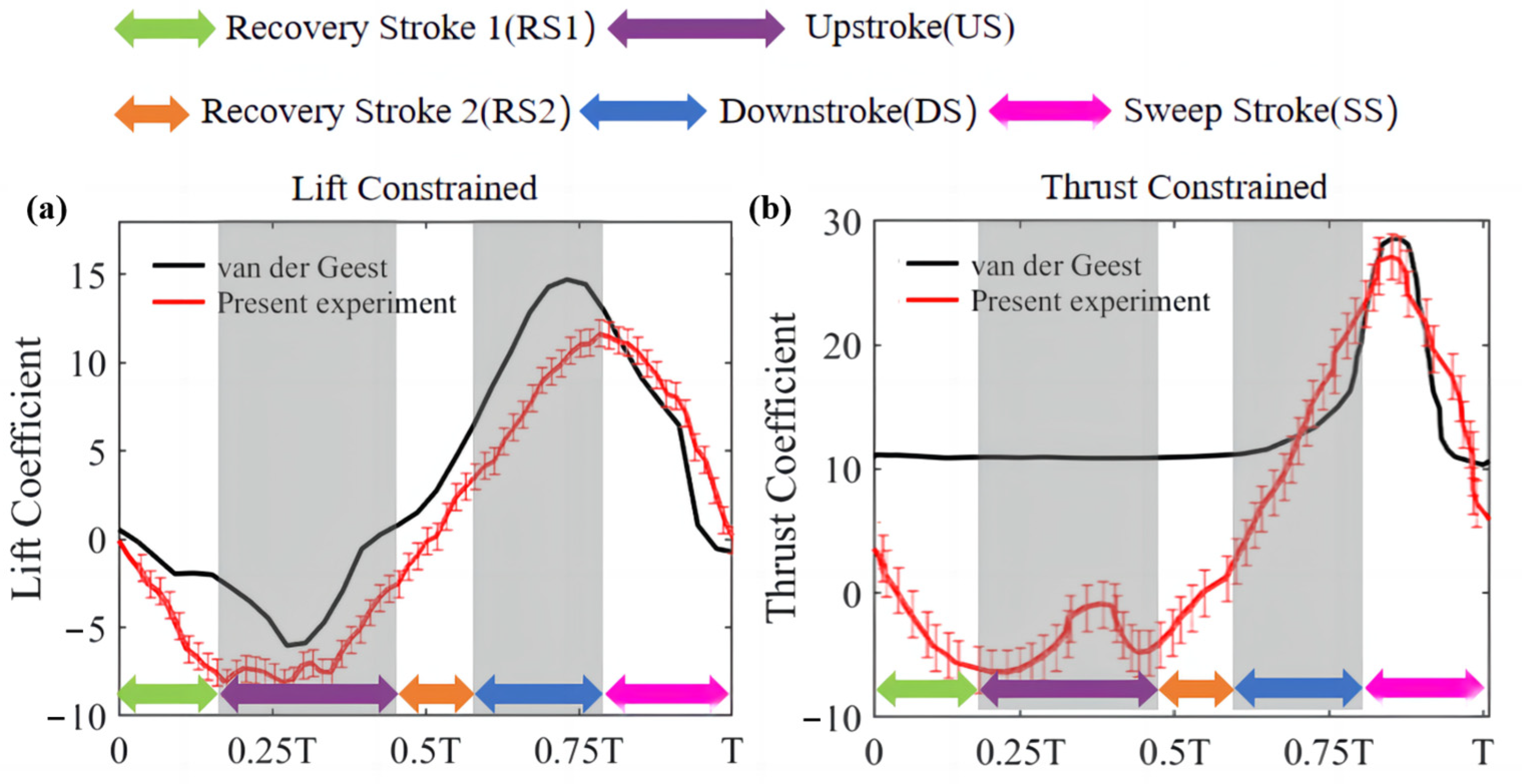
This study meticulously explores the influence of motion trajectory on the hydrodynamic performance of turtles’ fins. Prior to investigating key parameters such as asymmetry in pitching, we initially subjected the device to the exact same motion pattern as that employed by van der Geest, enabling a comparison of lift and thrust coefficient measured under constrained conditions. To put it more precisely, a turtle robot with flexible fins is fixed to a beam in Van der Geest’s experiment. A force balance was placed at the top of the beam to characterize the lift and thrust experienced by the turtle robot as a whole under constrained conditions. To simplify and focus on the force exerted on a single fin, our experiment employed a high-precision six-component force sensor positioned at the base of the fin for measurement. This setup allows us to precisely measure the lift and thrust acting on individual fins when subjected to asymmetric driving, thereby providing deeper insights into their motion characteristics and force-generating mechanisms. From
Figure 5, it is evident that the experimental results in this study generally follow the same trend as that of van der Geest’s findings in terms of lift and thrust coefficient curves over one cycle.
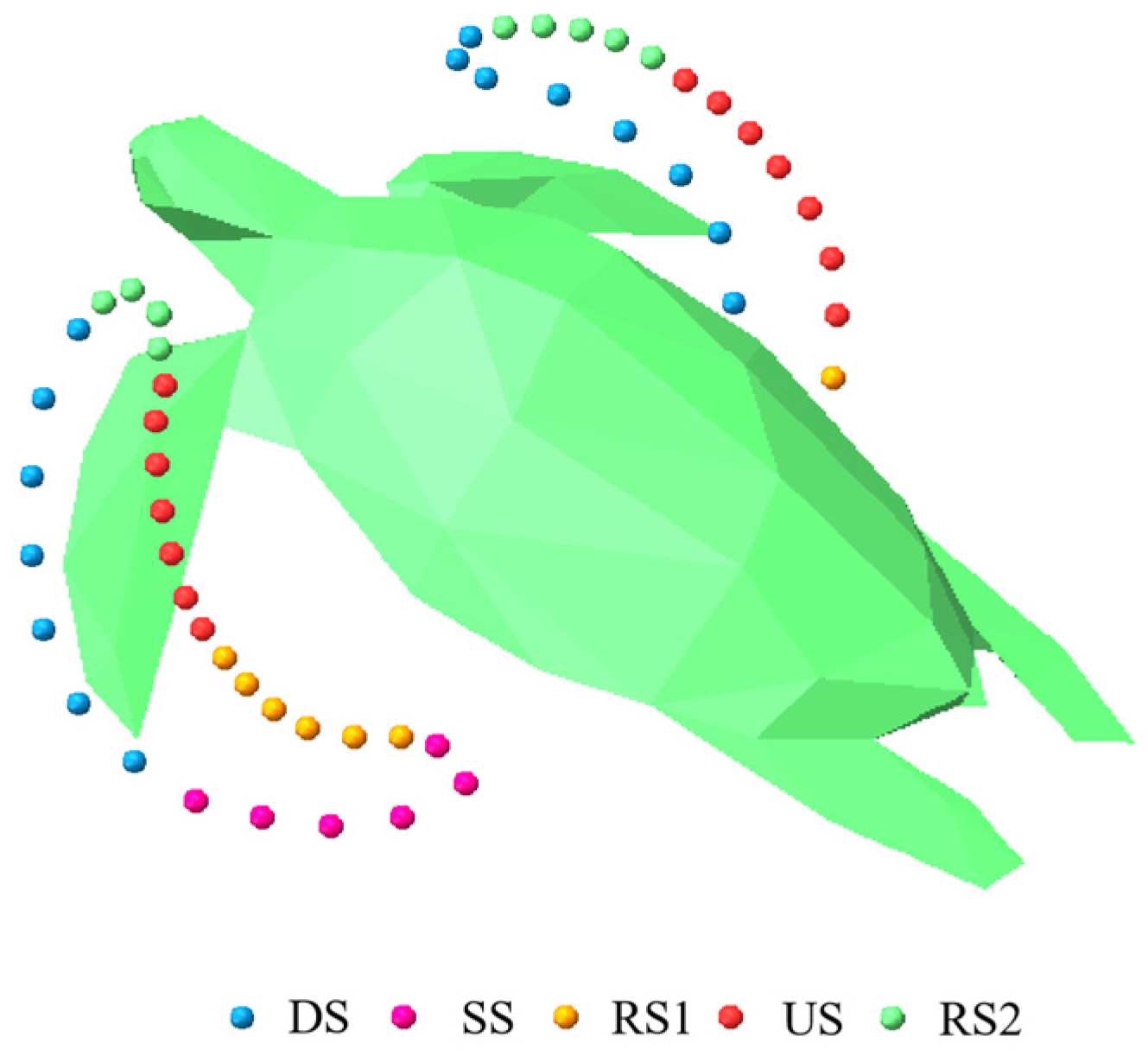
Following van der Geest’s research framework, a sea turtle fin’s flapping cycle is divided into five phases, as mentioned in the first part of this article, denoted by the colors green, purple, orange, blue, and magenta. The lift curve on the left column reveals that during the first phase (green arrow region), the sea turtle’s flapping fin moves forward and upward from the initial position, producing negative lift. Simultaneously, the fin keeps pitching, causing minor fluctuations in negative lift during the second phase. The third phase corresponds to a period of pitching angle inactivity, where, despite continuous flapping and sweeping coupled motions, the slope of the lift curve noticeably decreases. Towards the end of the third phase and into the mid-fourth phase, as the fin moves towards the end of the upstroke, it initiates a backswing motion accompanied by a substantial pitching angle change, resulting in a lift peak. In the final phase, lift gradually decreases as the pitching angle reverses. The thrust coefficient curve obtained in this study exhibits some deviations from van der Geest’s results, particularly during the upward–forward flapping phases, where the measured results show resistance and an anomalous fluctuation during the upstroke stage. The measurement uncertainty is much smaller than this disparity, indicating that the substantial difference in thrust between the present study and van der Geest is clearly not due to measurement error. The difference may well be attributed to the flexibility in the model of van der Geest. In fact, the result of van der Geest show positive thrust through the whole cycle, even in the retrieving stage, which is rather intriguing and very difficult, if not impossible, to achieve using rigid fins. This means that for rigid fins, although the major features can be captured by replicating the motions, further improvements could be achieved by introducing flexibility, which is not the focus of the present study. Nevertheless, despite these differences, it is evident that the peak thrust coefficient agrees much better.
3.3. Effects of Asymmetric Pausing Time of Pitching Motion
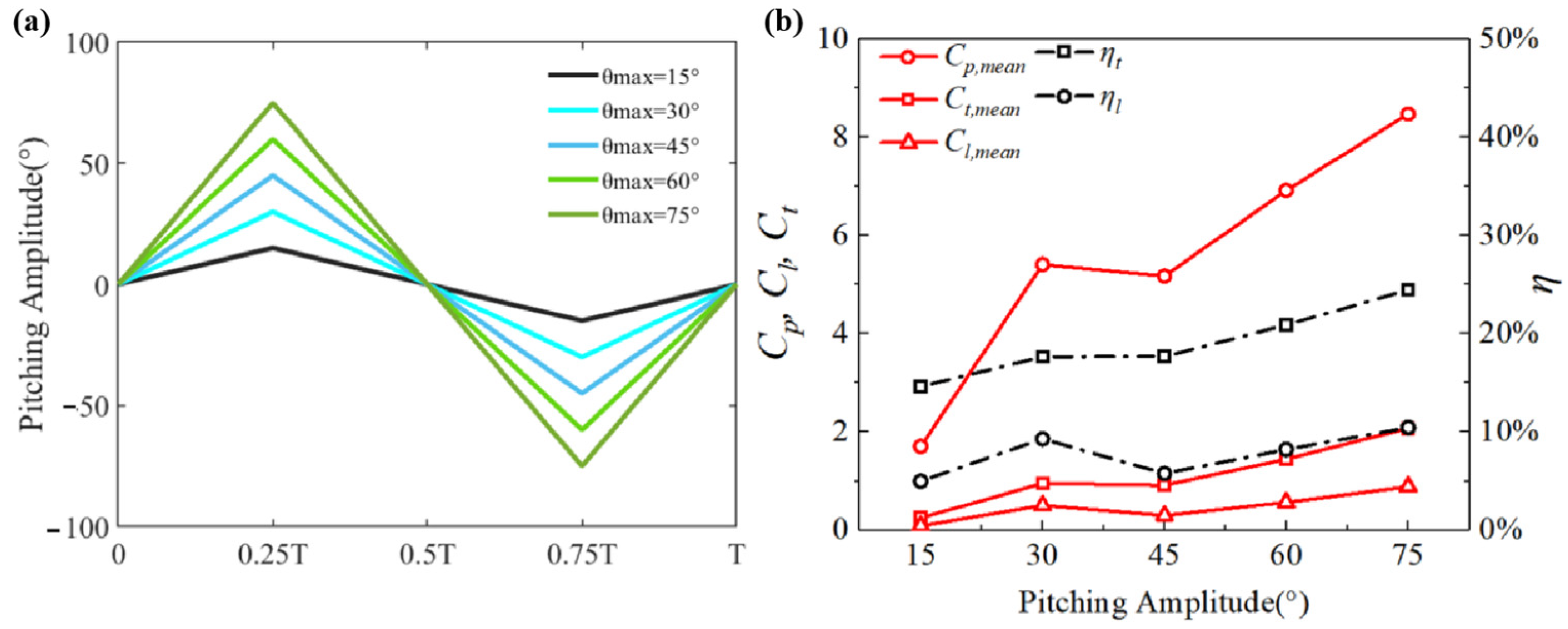
In the previous section, it is observed that a high mean thrust is achieved under the condition of high pitching amplitude in symmetric flapping motion without pitch pausing. To further explore the impact of asymmetric characteristics in the pitching angle, we selected an optimal parameter combination. Upon careful examination of the curve of the real turtle’s pitching angle in
Figure 3, it is evident that there exists a “holding period” in both the upstroke and downstroke phases. The duration of this holding period seems to be related to the peaks of the flapping and sweeping angles.
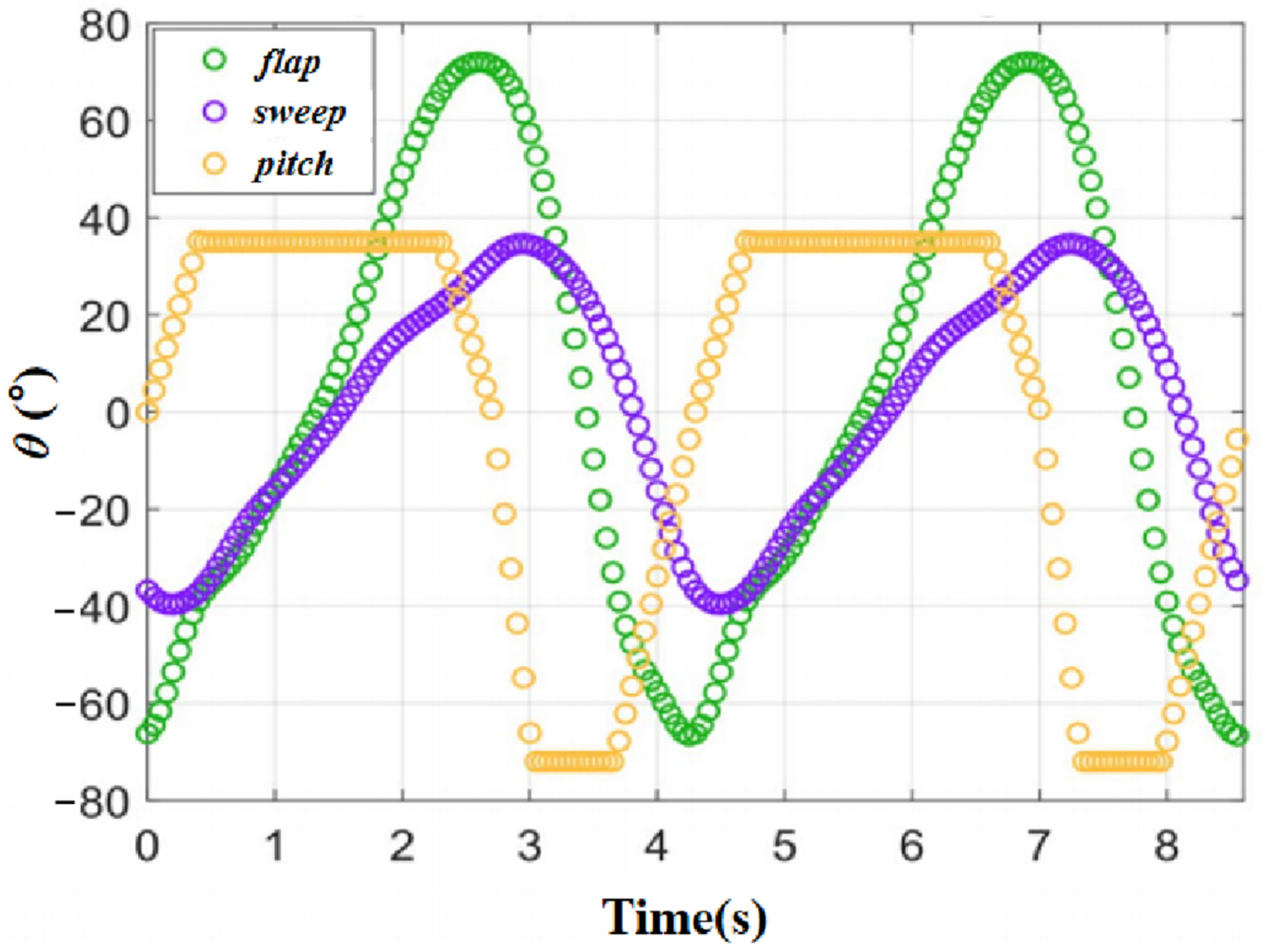
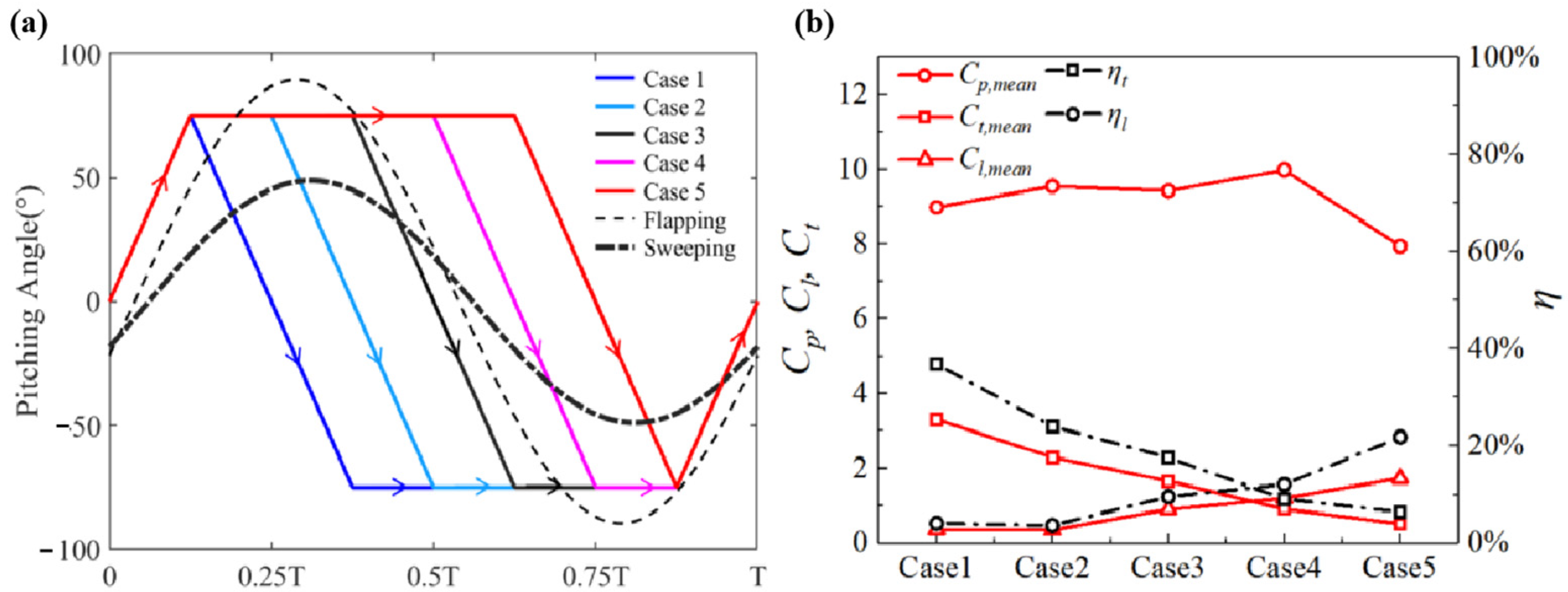
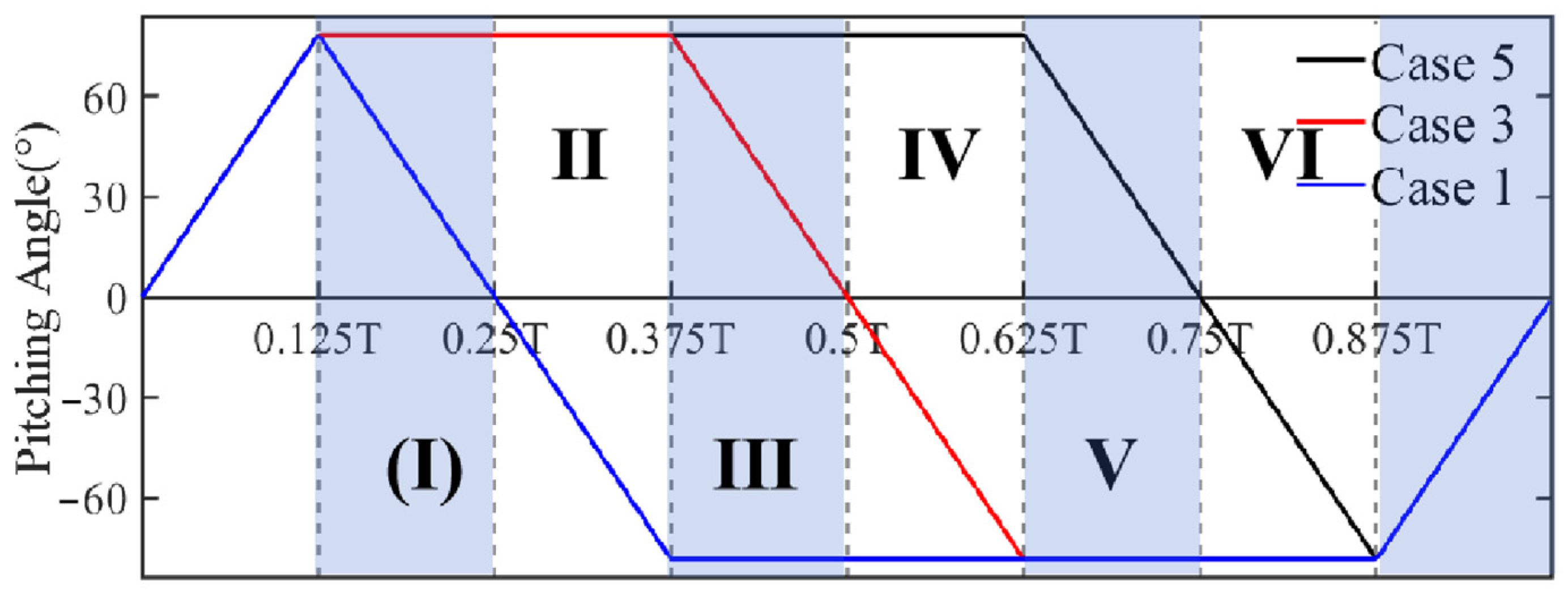
In this section, we maintain a constant slope in the pitching angle variation, altering the position and duration of the holding interval to investigate the influence of symmetric or asymmetric pitching motion conditions on the hydrodynamic characteristics. Specifically, we divide one flapping cycle into eight sub-cycles. For symmetric conditions, we halt the pitching motion of the flapping fin in the 1/8 T–3/8 T phase of the first half of the cycle and the corresponding 5/8 T–7/8 T phase of the second half of the cycle, while ensuring linear increases or decreases in pitching angle during the other phases. For asymmetric cases, we, respectively, decrease or increase the holding period in the first half of the cycle, accompanied by a corresponding increase or decrease in the “holding period” in the second half of the cycle, with each case differing by one-eighth of a cycle. The evolution of the pitching angle over time for the five cases is illustrated in
Figure 7a. Particularly, through a comparison with van der Geest’s pitching kinematics in
Figure 4, it becomes apparent that case 4 closely mimics the natural motion of turtles in the real world.
Figure 7b illustrates the variations in the mean thrust coefficient (
Ct,mean), mean lift coefficient (
Cl,mean), and mean power coefficient consumed by the fin’s motion (
Cp,mean), as well as the propulsive and lifting efficiency under five different operating conditions. A noticeable decrease in the average thrust coefficient, represented by the red squares, is observed with the gradual increase in the duration of the upstroke holding phase. Conversely, the average lift coefficient exhibits an opposite increasing trend with the increase in the duration of the upstroke holding phase. Moreover, the average power coefficient, used to characterize energy utilization by the flapping fin under different motion strategies, shows no significant correlation with asymmetry. Case 4, which closely resembles real turtle motion, coincidently displays the highest average power coefficient.
To be more specific, thrust efficiency tends to reach its maximum (approximately 37%) during the forward pitching phase without any pause, and sharply decreases to 6% as the duration of forward pitching pause increases. In contrast, lift efficiency increases with the prolonged duration of the forward pitching phase, ranging from 4% to 22%. This suggests that sea turtles can achieve high lift efficiency or thrust efficiency by controlling the asymmetric characteristics of pitching angles based on different propulsion requirements. For instance, the turtle in the literature, due to being in a fixed state, is more inclined to improve lift efficiency, hence exhibiting a forward pitching pause longer than the pitching pause during the backward stroke.
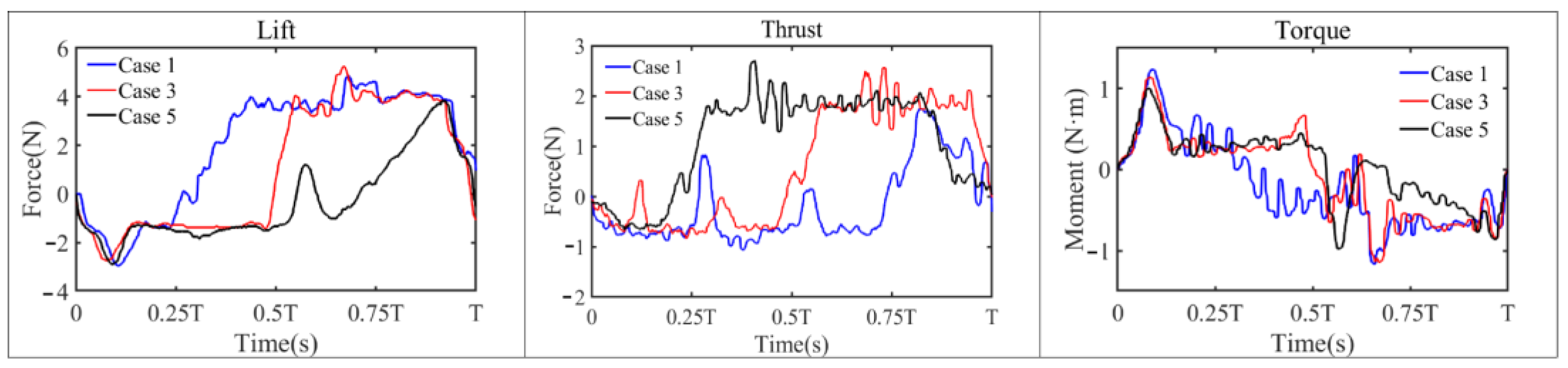
The evolution of the lift, thrust, and torque of the fin during one period (T) is depicted in
Figure 8 (for the three cases illustrated in
Figure 9). It is observed that, for both the lift and thrust profiles, all three cases exhibit a common trend of initial descent, subsequent ascent, minor oscillations during the plateau, and final descent. As the duration of pitching stagnation during the downstroke diminishes gradually from case 1 to case 5, it is notable that the duration of positive lift decreases accordingly, while the duration of positive thrust correspondingly increases. Moreover, concerning the thrust profiles, it is evident that with the elongation of pitching stagnation during the downstroke, the fluctuation amplitude of negative thrust significantly diminishes. Particularly in case 5, the negative thrust stage displays minimal oscillation. The variation in torque is deeply related to the pitching motion, where the most significant difference in torque among the cases occurs coincidently with the difference in the pitch pausing duration.
To uncover the mechanism behind the variation in
Ct and
Cl, it is imperative to examine the flow field near the flapping fin for different pitching angle cases. The vorticity contours in
Figure 10, respectively, present the PIV experimental results for the case most conducive to lift efficiency (case 1, forward pitching with no pause), the symmetric case (case 3), and the case most beneficial to thrust efficiency (case 5, reverse pitching with no pause). The results clearly depict the movement of attached and detached vortices near the fin throughout one cycle.
For the motion pattern whose pitching angle performs a symmetric motion, the flow field is depicted in the left column of
Figure 10, where the coupled motion of flapping, sweeping, and pitching results in the evolution of a pair of vortices, from attachment to detachment, culminating in elongation and fragmentation. In the initial phase, a pair of counter-rotating detached vortices forms at both edges of the fin. Unlike the orderly detachment of vortices in the flapping direction observed in a purely flapping motion, during the 0–1/8 T phase, these vortices quickly dissipate and disappear under the influence of the pitching motion of the fin.
Subsequently, during the 1/8–3/8 T pitching pause, there is no evident vortex generation. It is not until the commencement of the next reverse pitching (t = 3/8 T) that a pair of attached vortices reappear on both sides of the fin, gradually detaching as the pitching action unfolds. In the next pitching pause period (t = 5/8 T–7/8 T), a series of tiny-scale vortex structures can be witnessed detaching from the wing’s trailing edge accompanied by the flapping and sweeping processes. Some counterclockwise vortices collide and fragment with the clockwise vortices generated during the previous upstroke.
To conduct a more comprehensive analysis of how the two cases of asymmetric motions impact the shedding vortex evolution on the fin, this study specifically investigates the distinctions in shed vortices during the intermediate six one-eighth time steps across three distinct cases. Case 1 (corresponding to the blue line in
Figure 9) initiates pitching movement during stage III, entering a pause period coinciding with the downward and backward flapping process. At this juncture, a pair of counter-rotating vortices forms along the thrust direction, contributing notably to thrust enhancement for this case. Conversely, case 5 (corresponding to the black line in
Figure 9) initiates reverse pitching rotation during stage IV, instigating the development of shed vortices at the leading and trailing edges in the lift direction (as denoted by the arrow in
Figure 10f, right column), thus elevating the lift efficiency for this condition.
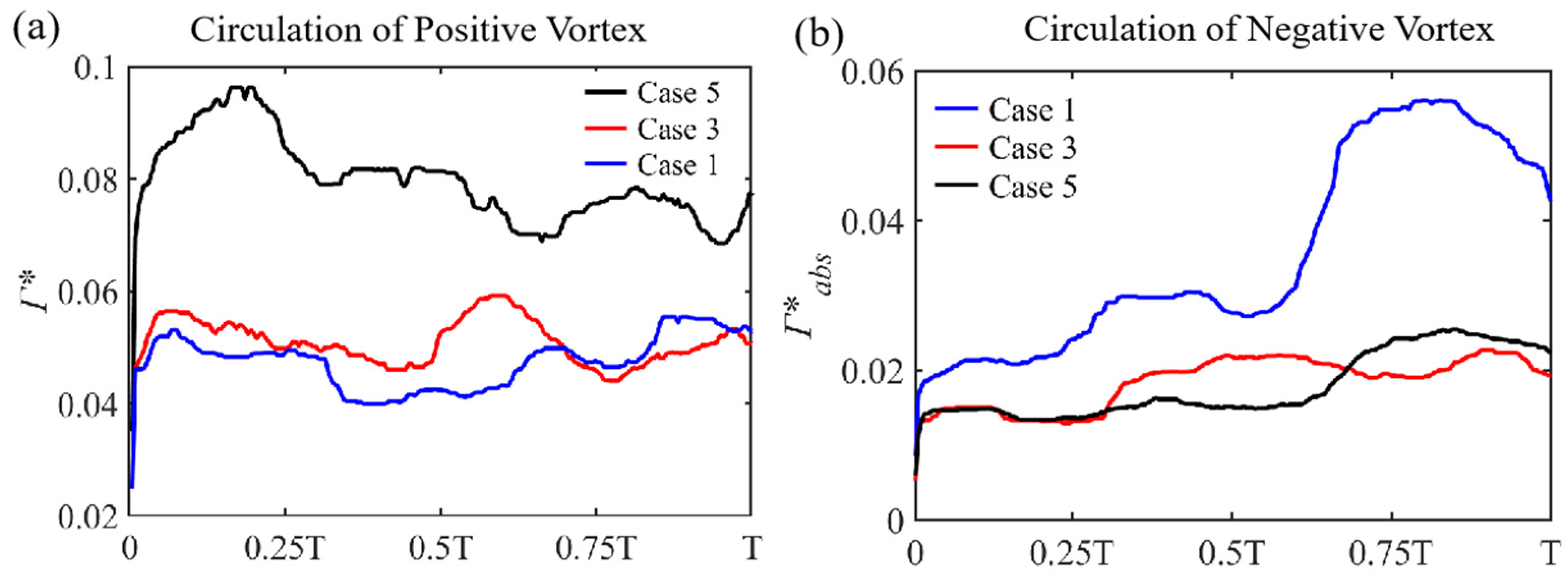
For a more rigorous quantitative investigation,
Figure 11 presents a statistical analysis of the positive and negative shed vortex circulation for the three conditions over one motion cycle. Circulation is defined as the curvilinear integral of the velocity vector field along a closed curve and can also be converted to the surface integral of the vorticity field over a surface [
24], as adopted in this study.
In accordance with Equations (11) and (12), this study performs integrated non-dimensional circulation on the vorticity field data obtained through the post-processing of particle image velocimetry (PIV). To streamline the workload, rectangular regions are selected for analysis, and the boundary conditions for these regions are set such that the vorticity scalar value is 0.5% of the maximum vorticity at the vortex center.
On the grounds of the variation in circulation for three cases, it is evident that, for the clockwise vortex circulation integral results (
Figure 11a), the overall circulation value for the maximum lift efficiency condition is significantly higher than the other two scenarios. This, to some extent, corroborates that such an asymmetric pitching pattern is conducive to enhancing the lift of a single cycle for the flapping fins. Similarly, the circulation’s absolute value from the counterclockwise vortex integration (
Figure 11b) indicates that the condition with the highest thrust efficiency, i.e., case 1, also has a higher circulation value compared to the other two cases. Furthermore, the circulation variation trends reveals that within one motion cycle, for both case 1 and case 5, time intervals with relatively large circulation values correspond to the moments when the pitching angle comes to a standstill. This indicates that the sea turtles intermittently halt the pitching motion around the fin base during the three-degrees-of-freedom motion to retain attached vortices along its leading and trailing edges, thereby increasing the lift or thrust required for the specific swimming process.
3.4. Effects of Pitching Rate
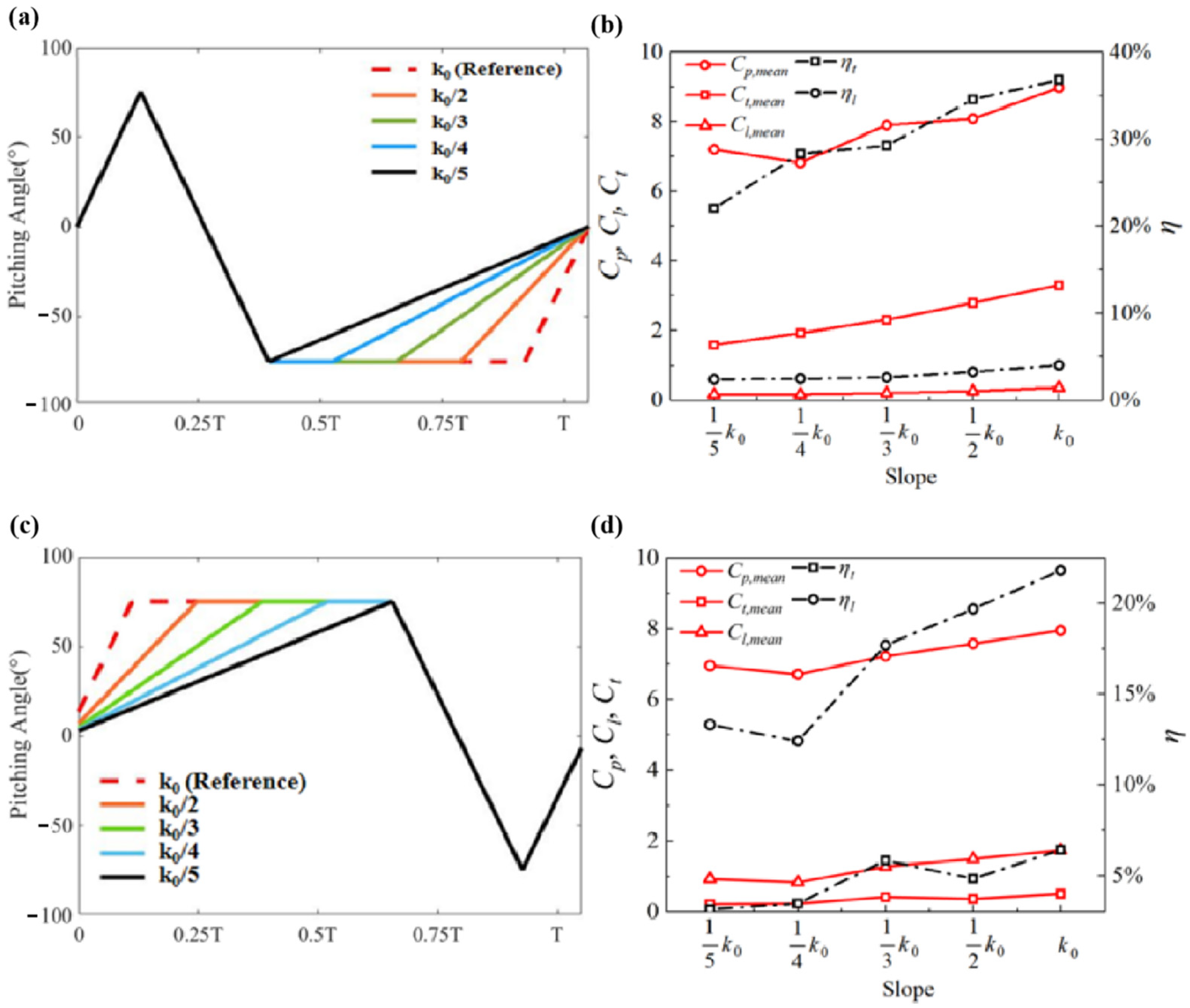
Based on the above analysis, it is evident that the asymmetric pitching angle variations can indeed enhance the lift or thrust efficiency of turtle swimming. It is noted that the slope of the pitching angle with respect to time, or the pitching rate, is also a crucial factor influencing the power input. Under the condition of maintaining a constant pitching amplitude, the variation in the slope also affects the duration of the pitching pause. To investigate the impact of such pitching rate variations on the hydrodynamic performance of the fin’s motion, two cases which exhibited the best lift and thrust efficiency, respectively, from
Section 3.3 were selected. Accordingly, the slope of the pitching angle was varied to explore the changes in force coefficients and efficiency. The specific pitching angle variation curves are shown in
Figure 12a,c. To measure the slope magnitude more straightforwardly, the case with the maximum slope was defined as the reference pitching rate,
k0 (
k0 = 2.167 rad/s), in accordance with Equation (13), where the pitching amplitude (
θm) is 75° and the slopes of the other four cases are denoted as 1/2
k0, 1/3
k0, 1/4
k0, and 1/5
k0.
Figure 12b,d present the variation in the mean thrust coefficient (
Ct,mean), mean lift coefficient (
Cl,mean), and mean power coefficient (
Cp,mean) in relation to cases 1 and 5 from the previous section, respectively. In relation to the case with the maximum propulsion efficiency (case 1), it can be observed that with the increase in pitching rate, the average thrust coefficient of the fin significantly increases. Comparatively, the lift coefficient also shows an increasing trend, but the magnitude of the change is relatively small. As for the mean power coefficient, it exhibits a rising trend with the extension of the pitching pause, reaching its lowest point at a slope of 1/4
k0.
Additionally, it is evident that increasing the slope and extending the pitching pause contributes to enhancing the propulsion efficiency from 22% to 37%, while the impact on lift efficiency in this case is almost negligible. In contrast, for the condition with the maximum lift efficiency (case 5), it can be observed that with the increase in slope, the average lift coefficient of the fin significantly increases. Comparatively, the thrust coefficient also shows an increasing trend, but the magnitude of the change is relatively small. The lowest point of the mean power coefficient occurs at a slope of 1/4 k0.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











