1. Introduction
We have plenty of options today for every single decision we make in our daily lives. However, choosing the best option from the available alternatives is extremely difficult if each option satisfies a different viewpoint. Multi-attribute decision-making (MADM) is a modern procedure to identify the most desirable alternative that maximizes our profit according to the attribute values. The theory and methods of MADM are used to make several important decisions, such as personnel selection, industrialization, waste management, site selection, and so on. Three critical steps comprise the MADM procedure. The first step is to collect information about alternatives based on various attributes. The second step is to aggregate the collected information to produce the overall decision value of the target. The best option must be chosen in the final step after ranking the alternatives in order of preference. The ambiguity and uncertainty of real-life scenarios emanate from an absence of appropriate knowledge and information.
The most significant aspect of decision-making problems is displaying attribute values more efficiently and precisely. In the real world, we frequently have to make decisions. However, it can be challenging to fully prepare for the task. In everyday life, it is more appropriate to elicit attribute values by fuzzy numbers [
1] rather than exact values because of insufficient information and the complexity of the MADM issues. However, the fuzzy set is only defined by the membership degree (MD), which is insufficient for making several real-life decisions. The decision-makers also provide the nonmembership degree (NMD) to assess the attribute values. Attansov [
2] initiated the intuitionistic fuzzy set (IFS) associated with MD and NMD, whose sum is constrained to
Many studies have been recently developed to address various MADM issues with IFSs [
3,
4]. Seikh and Mandal [
5] established Dombi aggregation operators (AOs) for fusing job information and selecting the most preferable job using intuitionistic fuzzy (IF) data. Senapati et al. [
6] developed IF Aczel-Alsina operators and applied them to choose sustainable transportation-sharing practices. Gohain, Chutia, and Dutta [
7] introduced a symmetric distance in the IF environment and applied it to solving pattern recognition and clustering problems. Ke et al. [
8] developed a ranking method for IFSs and applied it in selecting sites for photovoltaic poverty alleviation projects. Wan and Yi [
9] proposed the power average operators of trapezoidal intuitionistic fuzzy numbers using strict t-norms and t-conorms.
However, IFS is insufficient to handle situations when the sum of the MD and NMD values is greater than 1. To address this issue, Yager [
10] introduced the Pythagorean fuzzy set (PyFS). The total value of the squares of MD and NMD in PyFS is limited to 1. The PyFSs have been utilized to solve several complex MADM problems [
11,
12]. Combining SWARA and CODAS methods, Ayyildiz [
13] established a decision-making approach and applied it to select e-scooter charging station locations. Ertemel et al. [
14] presented an integrated MADM methodology based on PyFSs by combining the CRITIC and TOPSIS methods and using them to assess adolescents’ smartphone addiction levels. Giri, Molla, and Biswas [
15] presented the DEMATEL method using PyFSs and utilized it for supplier selection problems.
Later, Yager [
16] introduced
q-ROFSs as an expansion of IFSs and PyFSs. The
q-ROFSs is an effective approach to modeling ambiguity and uncertainty. In
q-ROFSs, the total value of the
qth power of the MD and NMD is constrained to
The concept of
q-ROFSs has been implemented effectively for a variety of MADM problems. Mandal and Seikh [
17] proposed an improved score function for the ROFSs and developed the EDAS method with
q-rung orthopair fuzzy data to select a vacant post of a company. Peng and Liu [
18] introduced some novel formulae for information measures of
q-ROFSs and applied them to several decision-making problems. Wang et al. [
19] introduced a
q-ROF environment-based MABAC model and utilized it in solving MADM problems. Seikh and Mandal [
20] developed
q-ROF Frank AOs and utilized them in solving MADM problems. Wang et al. [
21] introduced Muirhead mean AOs for fusing
q-ROF information. Wang et al. [
22] defined
q-ROF Hamy mean operators and used them in their work on enterprise resource planning systems. Kausar et al. [
23] expanded the CODAS approach to the
q-ROF framework and applied it to assess cancer risk.
The second step of the MADM method requires integrating the evaluation information of the attributes to select the most promising one. We are accustomed to two methods for obtaining the best option. The first is a traditional evaluation method that can only determine the ranking of alternatives. The second approach involves an information aggregation approach which supplies comprehensive evaluation values for all the alternatives. AOs are mathematical tools to aggregate or combine information. AOs can combine some finite numerical values into a single datum. Therefore, to enhance feasibility while dealing with MADM problems, the second approach shows more efficiency, which motivates us to research further. As a result, the second approach provides greater efficiency in dealing with MADM problems, motivating us to conduct additional research.
Generally, the AOs under various fuzzy environments are established with the help of algebraic, Einstein, Hamacher, and Frank t-norm (TN) and t-conorm (TCN) methods. However, these existing TCNs and TNs are some particular cases of ATCNs and ATNs [
24,
25]. By changing the value of the additive generator, the ATCN, and ATN can be converted into different forms. As a result, the ATCN and ATN are more adaptable, powerful, and generalized. Many scholars have proposed AOs in a variety of fuzzy environments using ATCN and ATN for integrating ambiguous data, for example, complex IF environment [
26], interval type-2 fuzzy environment [
27], Pythagorean hesitant fuzzy [
28], dual hesitant fuzzy linguistic [
29], hesitant trapezoidal fuzzy environment [
30], interval-valued dual hesitant fuzzy [
31], and t-spherical fuzzy environment [
32]. According to the above literature review, many authors have developed AOs based on ATCN and ATN in several fuzzy environments. However, no authors have utilized ATCN and ATN to construct AOs under the
q-ROF environment. Therefore, this paper aims to present AOs utilizing ATCN and ATN to combine
q-ROF information. Inspired by the ATCN and ATN-based AOs under an intuitionistic fuzzy environment [
33], in this paper, our goals are:
To develop q-ROF Archimedean weighted averaging (q-ROFAWA), q-ROF Archimedean order weighted averaging (q-ROFAOWA) and q-ROF Archimedean hybrid averaging (q-ROFAHA) AOs.
To develop q-ROF Archimedean weighted geometric (q-ROFAWG), q-ROF Archimedean order weighted geometric (q-ROFAOWG) and q-ROF Archimedean hybrid geometric (q-ROFAHG) AOs.
To discuss some desirable characteristics of the suggested operators and to show our proposed operators are the generalizations of algebraic, Einstein, Hamacher, Frank, Yager TCN, and TN-based AO.
To present a model for dealing with MADM problems that depend on the suggested q-ROFAWA and q-ROFAWG operators.
To illustrate the potency and supremacy of the suggested model by emphasizing a numerical problem about site selection for software operating units.
The remaining portions of this article proceed as follows: several fundamental preliminaries are described in
Section 2. We define a few novel operational rules for
q-ROFNs based on ATCN and ATN in
Section 3. In
Section 4, some new AOs are established under a
q-ROF environment, and their desirable characteristics are discussed based on ATCN and ATN. In
Section 5, we utilize the
q-ROFAWA and
q-ROFAWG operators to develop some approaches for handling MADM problems. In
Section 6, we elaborate on a numerical problem about site selection for software operating units to illustrate the adaptability and viability of our suggested approach. Then in
Section 7, our model is compared with some well-known methods. Finally,
Section 8 presents the conclusions of the paper.
6. Numerical Illustration
We present a numerical problem about site selection for software operating units to demonstrate the proposed model.
Consider the case of a multinational company (MNC) that wishes to expand its global footprint. Assume the company needs to establish a software-operating unit in another country. Suppose they have offers from four countries worldwide, namely and So their problem is to select the best alternative country that will potentially increase their business profit while minimizing all costs.
They need not only an economically developed country but all the necessary facilities, and cooperation from the country is also crucial for them. In addition, they prioritize lowering labor and transportation costs.
So according to their priorities, the decision-making committee of the company has proposed the following attributes:
Distance from the core market (): The company is already well-established, so they have their market globally. So, for better communication, the distance between the market and the operating place is desired to be minimized. For instance, if a company’s core market is in South Asia and its alternative countries for developing software operating units are Canada and Japan, the company will ideally prefer Japan because it is less distant from the company’s core market.
Regular cost (): To build a software operating unit and run it effectively, the company has to estimate its regular cost of operating and maintenance, which varies from country to country hugely. So, the company will always prefer the country where the skilled and unskilled labor cost, instrument, and device cost, transportation cost, energy cost, etc., are minimized.
Facilities from the government of that country (): Any MNC will need a large space, good electricity supply, and good transportation, and communication facilities which are expected to be provided by the local government. However, the availability of these opportunities from the government of the corresponding country will vary country-wise. For example, an economically weaker country will produce better opportunities to attract big companies for the following reasons:
to create job opportunities for its unemployed citizens;
to increase its gross national product;
to attract other investors for future industrial expansion;
to improve international impact from an economic perspective.
So, the company must prefer the country which will provide more opportunities and cooperation from the government.
Availability of skilled and unskilled labor (): The company requires a large amount of skilled and unskilled labor to run the software operating unit. As a result, the company will seek skilled and unskilled labor at the lowest possible cost. Otherwise, it must import the same from other countries, which is very expensive. As a result, the company must prefer a country with skilled engineers as well as unskilled laborers.
Future possibilities (): The company always has a plan for future extension of their current market. So, the company must prefer to build up its software operating station in a country where it can expand its market in the future. Furthermore, the company may avoid a country where another company’s successful market for the same product as theirs already exists. In other words, the company will try to avoid unnecessary competition in the near future. So the company will choose a country with more future possibilities for their market expansion.
Now, due to the presence of many conflicting attributes, a lack of information, and an imprecise human mind, the assessment and selection of the site to develop software operating units is a complicated uncertain decision-making problem. The
q-ROFSs provide an effective tool to deal with uncertainty in complex decision-making problems due to their broader space. Therefore, the managing committee gives their opinion in terms of
q-ROFNs about each alternative. The ratings of the alternatives with respect to each attribute are presented in
Table 7.
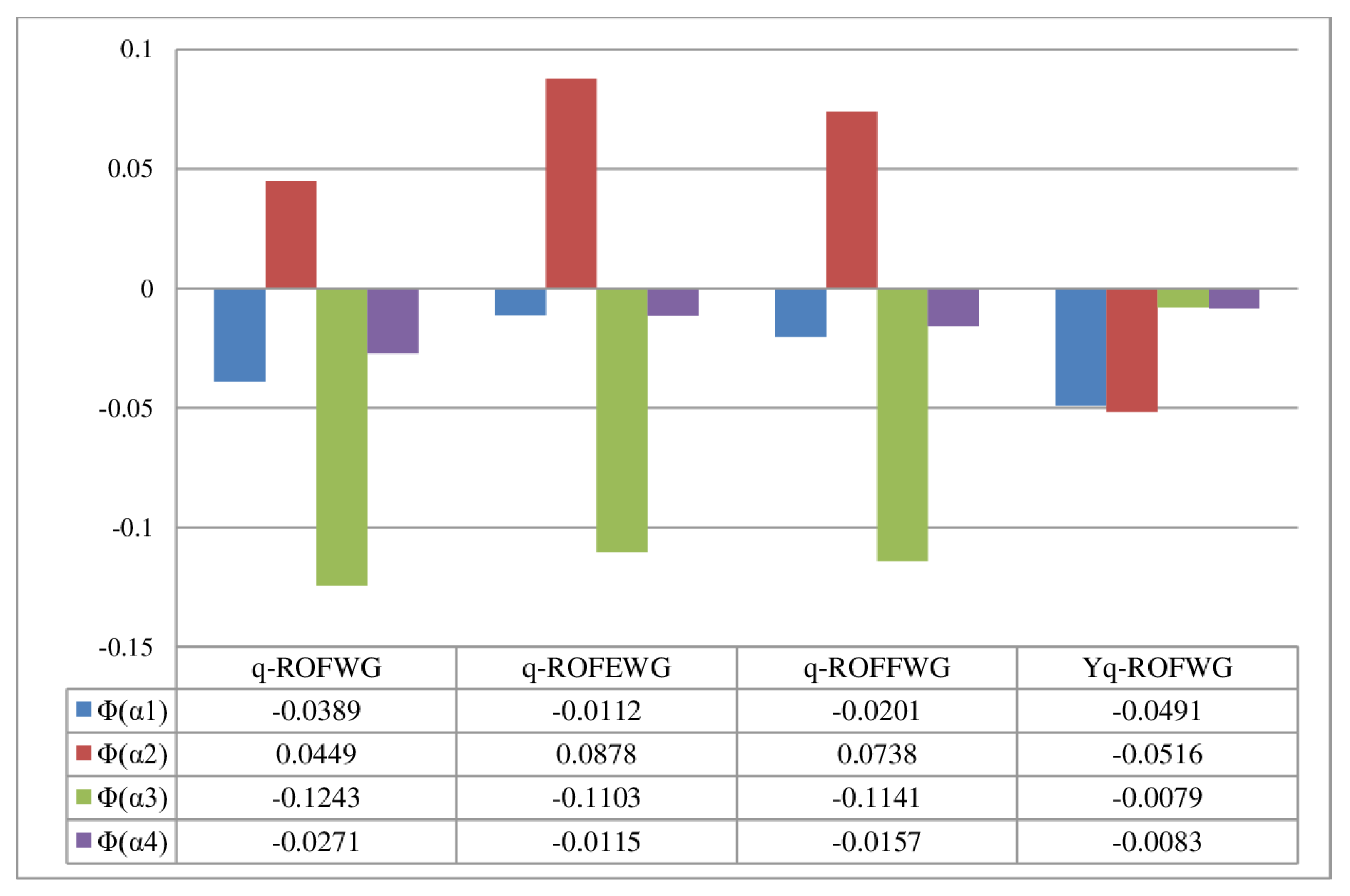
In the following, we utilize the proposed MADM model to solve the above numerical problem about site selection for software operating units.
At first, we apply the q-ROFAWA operator based method to select the most preferable country
- Step 1:
Input the q-ROF decision matrix.
- Step 2:
Normalizing the
q-ROF decision matrix using Equation (5) we obtain:
- Step 3:
Utilizing Equation (6) we obtain the attribute weights for the five attributes as
- Step 4:
Consider and in q-ROFAWA operator to compute overall performance values of countries using Equation (7). The aggregated values are given by:
- Step 5:
The score values using Definition 2 are given by: Therefore, using the score values, we rank the four countries as
- Step 6:
Therefore, the country possesses the highest rank among those four countries. So, the country is the most preferable country in which the MNC should build its new business branch.
Thereafter, we utilize q-ROFAWG operator to select the most preferable country
- Step 1:
Input the q-ROF decision matrix.
- Step 2:
Obtain the normalized matrix
- Step 3:
Utilizing Equation (6) the attribute weights are calculated as
- Step 4:
Consider and in q-ROFAWG operator to compute overall performance values of countries using Equation (8). The aggregated values are given by:
- Step 5:
The score values using Definition 2 are given by: = −0.0389, = 0.0449, = −0.1243, and = −0.0271. Therefore, using the score values, we rank the four countries as
- Step 6:
Therefore, the country possesses the highest rank among those four countries. So, the country is the most preferable country in which the MNC should build its software operating unit.
7. Comparison Analysis
In order to establish the validity and efficacy of the proposed model, we compared the outcomes obtained from our proposed method with those of several existing methods.
7.1. Comparison with Aggregation Operator-Based Methods
The calculation procedure for the IFWA [
38] and EIFWA [
38] is not very complicated, but its application field is confined. It can only handle decision-making problems with information expressed as an intuitionistic fuzzy number (IFN). Since our proposed MADM problem includes an evaluation value beyond the IFN, IFWA and EIFWA operators are insufficient to handle it. Now PFWA [
42] and PFEWA [
42] operators can only be used when the evaluation information is elicited as a PyFN. However, in PyFN, the square sum of MD and NMD is restricted to 1. As a result, the PFWA and PFEWG operators cannot be used to solve the given MADM problem. Now
q-ROFWA,
q-ROFEWA,
q-ROFFWA, and Y
q-ROFWA operators are most suitable to deal with the proposed model as the parameter
q makes the aggregation process more adaptable. The range of information can be extended by increasing the parameter
As a result, we can say that our proposed model outperforms the models based on IFWA, EIFWA, PFWA, and PFEWG operators.
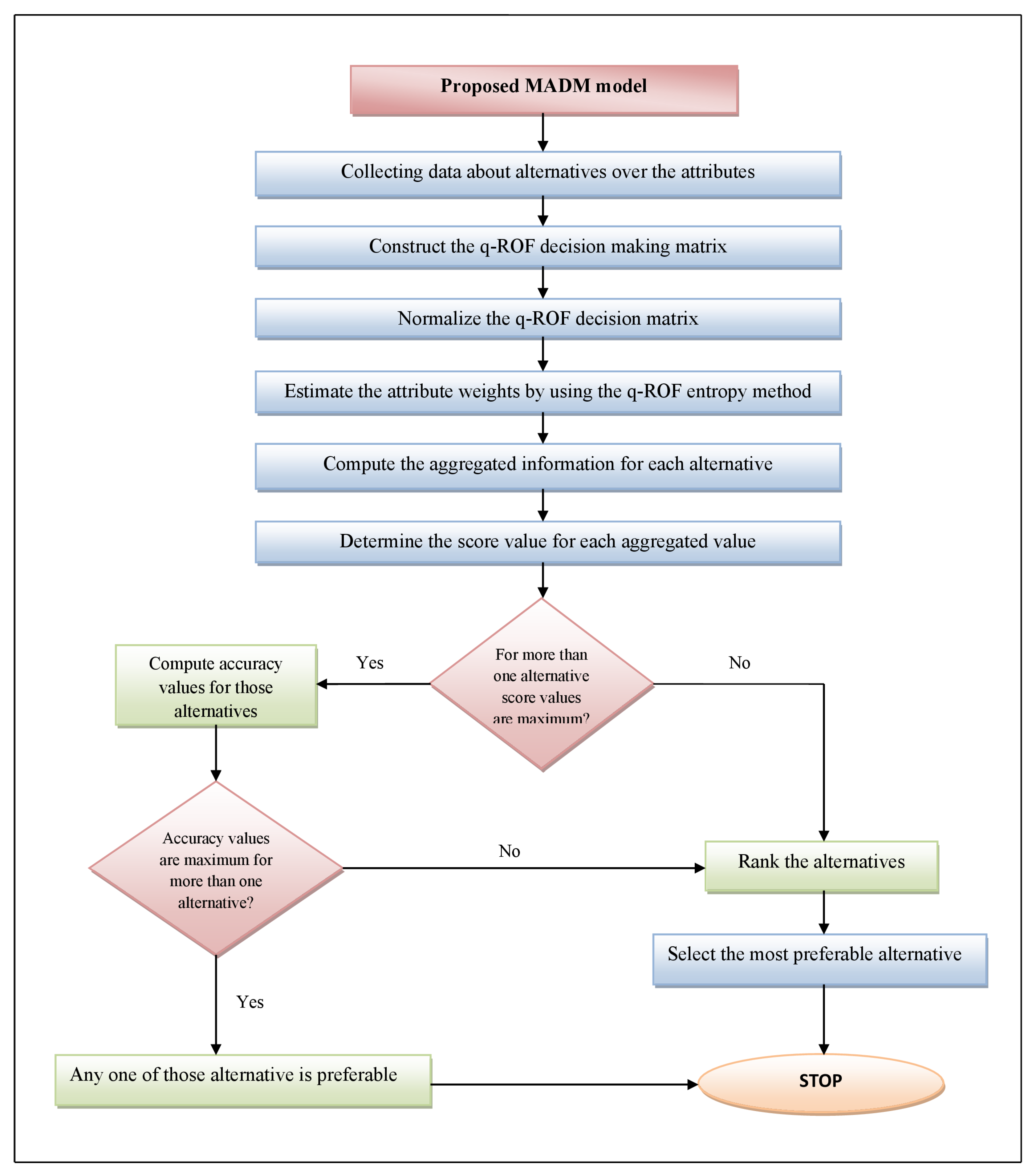
The appraisal score of every alternative is now computed using the
q-ROFWA,
q-ROFEWA,
q-ROFFWA, and Y
q-ROFWA operators. The alternatives are then ranked in descending order of score value. The ranking outcomes are shown in
Figure 2 and
Table 8. From
Figure 2 and
Table 8, we observe that for the
q-ROFWA,
q-ROFEWA, and
q-ROFFWA AOs ranking order is always
and the optimal alternative is always
although, the appraisal score for each alternative is different. Again, using Y
q-ROFWA operator we obtain the ranking order as
and the optimal alternative is
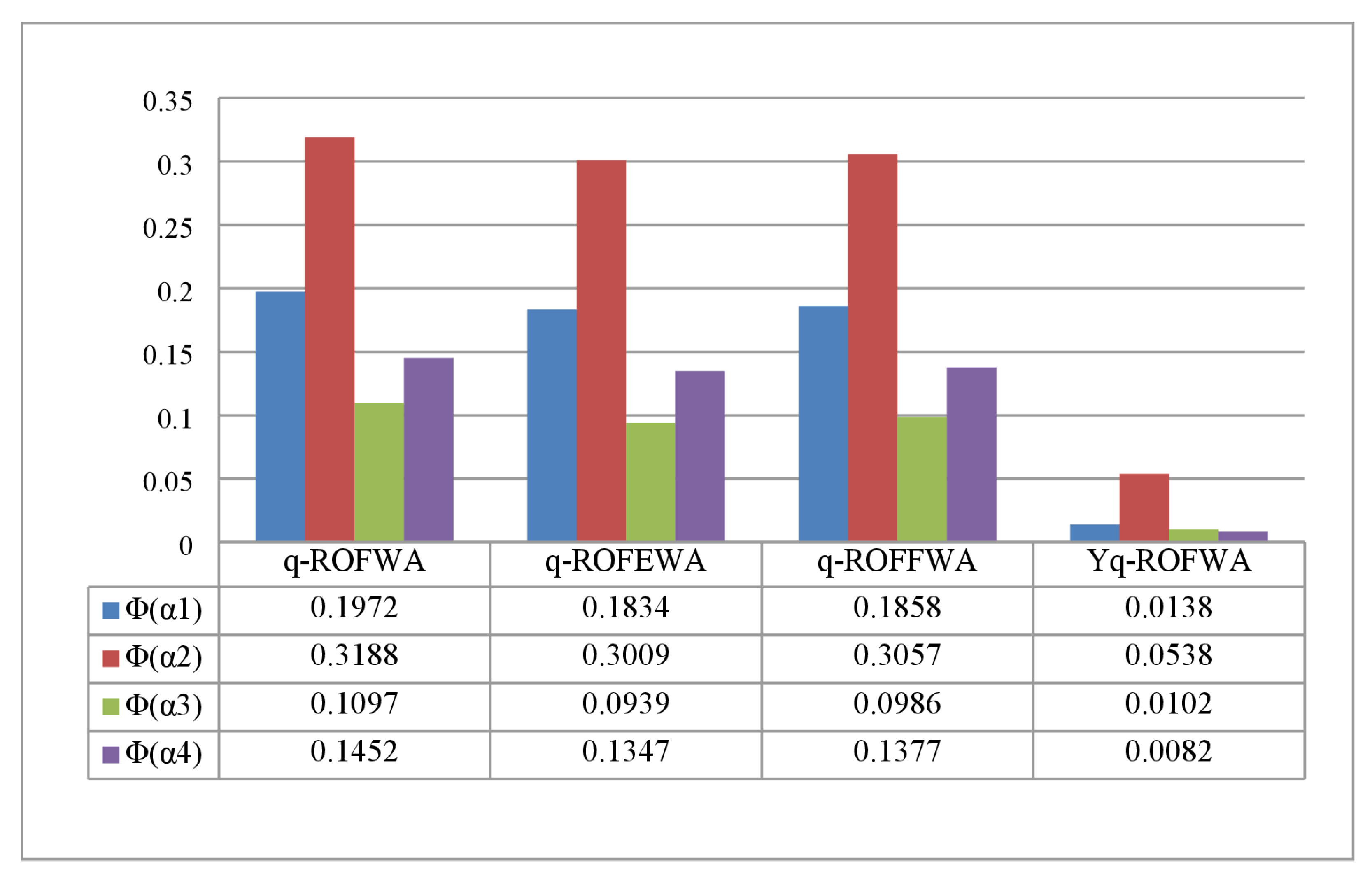
Now, we shall compare our result using
q-ROFAWG using different additive generators
The ranking results using different geometric aggregation operators are displayed in
Figure 3 and
Table 9.
From
Table 9 and
Figure 3, we see that the problem is not solvable by implementing IFWG, EIFWG, PFWG, and PFEWG AOs as they can only cope with IF information and Pythagorean fuzzy information. Again, utilizing
q-ROFWG,
q-ROFEWG,
q-ROFFWG operators, we see that while the score values for the alternatives vary, their ranking order almost remains the same, and
is the best option. Again, using Y
q-ROFWG operator, we obtain the ranking order as
and the optimal alternative is
The proposed procedure is more productive than conventional procedures for its flexibility to elicit fuzzy data in a wider range. Moreover, the existing approaches under the
q-ROF environment are a particular case of our proposed approach. Therefore, our suggested MADM method is more generalized and compatible with
q-ROFNs.
7.2. Comparison with q-ROF TOPSIS Method
In the literature, Alkan and Kahraman [
45] extended the TOPSIS method based on a distance measure under the
q-ROF environment. We call this approach Alkan and Kahraman’s method. This method is an effective model for solving MADM problems. Here, we apply the remaining steps of Alkan and Kahraman’s method to the normalized matrix
N mentioned in
Section 6.
At first, we determine the
q-ROF weighted aggregated matrix by using the entropy weights. Let
P be the weighted aggregated matrix. Then
At first, we determine the q-ROF positive ideal solution (q-ROFPIS) and the IVSF negative ideal solution (q-ROFNIS). Let be the q-ROFPIS and be the q-ROFNIS. So, and
Next, we compute the normalized Euclidean distance between the aggregated performance of alternative from the
q-ROFPIS and
q-ROFNIS which are denoted as
and
, respectively. The values of
and
are exhibited in
Table 10.
Finally, we calculate the relative closeness coefficient
for each alternative
where
The values of
are displayed in
Table 10. We exhibit the values of
in
Table 10.
According to
Table 10,
is the ranking order of the four available alternatives. Therefore,
is the best alternative obtained from Alkan and Kahraman’s method.
Therefore, the ranking of the alternatives using the proposed method and q-ROF TOPSIS method is almost the same. In both of the methods, the optimal alternative is always The only difference is the ranking between and In the q-ROF TOPSIS method where in the proposed method Therefore, the proposed method is highly reliable.
7.3. Comparison with q-ROF MULTIMOORA Method
Here, we compare the results of the developed method with the existing full multiplicative form (FMF) approach, the reference point (RP) approach, and the ratio system (RS) approach for the MULTIMOORA method [
46] under the
q-ROF environment. For this, the same numerical example is solved with the existing
q-ROF environment MULTIMOORA method [
46].
7.3.1. Comparison with RS Approach for q-ROF MULTIMOORA Method
Here, we apply the remaining steps of the RP approach for the MULTIMOORA method to the normalized matrix
N mentioned in
Section 6.
Then, we calculate the relative significance
for each alternative
using
q-ROFEWA operator [
36]. The values of
are exhibited in
Table 11.
Next, we defuzzify the
based on the score function given in Equation (
1). Finally, we rank the alternatives based on
values in descending order.
According to
Table 11, we obtain the ranking outcome as
Therefore,
is the best alternative obtained from the RS approach for the
q-ROF-MULTIMOORA method.
7.3.2. Comparison with FMF Approach for q-ROF MULTIMOORA Method
Here, we apply the remaining steps of the FMF approach for the MULTIMOORA method to the normalized matrix
N mentioned in
Section 6.
We calculate the total utility of the alternatives
for each alternative
using the
q-ROFEWGA operator [
36]. The values of
are exhibited in
Table 12.
Next, we defuzzify the
based on the score function given in Equation (
1). The score values of
are exhibited in
Table 12. Finally, we rank the alternatives based on
values in descending order.
According to
Table 12, we obtain the ranking outcome as
Therefore,
is the best alternative obtained from the FMF approach for the IVSF-MULTIMOORA method.
From
Table 11 and
Table 12, we can observe that the ranking of the four alternatives is
which is identical with the ranking obtained from the proposed methods. Therefore, our proposed model is highly reliable.
7.4. Validity Test
The same decision-making problem can produce different results for different MADM approaches. To illustrate the efficacy of our MADM approach, we check whether it satisfies the requirements set forth by Wang and Triantaphyllou [
47] as:
- Criterion 1:
If any non-optimal alternatives are replaced with worse alternatives while maintaining the level of significance of each attribute, the MADM approach remains efficient and the optimal alternative remains the same.
- Criterion 2:
The transitivity law must be followed by an efficient MADM method.
- Criterion 3:
If a MADM problem is divided into sub-problems, the given MADM problem can be used to rank the alternatives to those sub-problems. The joint ranking of the alternative remains unchanged from the previous ranking order.
Now, we testify in the following if our proposed method satisfies these criteria or not.
Test with Criterion 1
Here, a worse alternative is chosen arbitrarily and replaced by a new worse alternative where the q-ROF data for which the alternative satisfies the attributes are and , respectively. Depending on the modified information, the score values using the q-ROFEWA operator are obtained as , , , and The optimal ranking order is This gives that still, is the optimal alternative. Again the score values using the q-ROFEWG operator are obtained as , , , and Which tells that still is the most suitable alternative. Hence, the proposed model meets this criterion. Similarly, if we implement other proposed operators, the proposed model meets this criterion.
7.5. Test with Other Criteria
If the MADM problem is divided into smaller sub-problems which consist of , , and alternatives. By solving each sub-problem with our suggested procedure, we acquire the alternatives’ ranking as and , respectively. In this manner, by combining them, we obtain which is similar to the original one. As a result, our method also meets the second and third requirements.
8. Conclusions
The q-ROFSs are more flexible for expressing ambiguous information because of the presence of the parameter The Archimedean TCNs and TNs are generalizations of several TCNs and TNs. In this article, we have implemented the concepts of ATCN and ATN to develop AOs using q-ROF information. We have defined some novel operational rules for q-ROFNs utilizing ATCN and ATN. Thereafter, utilizing these operational laws, we propose q-ROFAWA, q-ROFAOWA, q-ROFAHA, q-ROFAWG, q-ROFAOWG, and q-ROFAHG operators. Afterward, the properties of these operators are thoroughly investigated. Next, we have shown that the AOs based on several existing TCNs and TNs (e.g., Frank, Hamacher, etc.) are particular cases of our proposed q-ROF AOs based on ATCN and ATN. Furthermore, we have presented a novel method to solve the MADM problem using the q-ROFAWA and q-ROFAWG operators. Finally, a numerical example of site selection of software operating units was used to show the feasibility, viability, and supremacy of the suggested approaches over other available methods.
There are some limitations to the current study. The primary limitation of this study is that the proposed model can only address the MADM issue. It can, however, be expanded to address MAGDM issues. Another shortcoming of this study is the computational complexity of the proposed model. However, this issue can be fixed by developing a computer program following the proposed approach, which will save decision-makers time and energy. Furthermore, the proposed MADM model is limited to the site selection problem. However, it is able to address other decision-making issues, e.g., sustainable development programs [
48], plastic waste management process [
49], job selection problems [
5], bio-medical waste management [
50], emergency assistance area selection [
51], etc. Furthermore, the current study develops the Archimedean aggregation operators within the
q-ROF context. However, the Archimedean aggregation operators can also be used in other fuzzy environments, e.g., the quasirung fuzzy environment [
52,
53], spherical fuzzy environment [
54], etc.








{kind=link}
{kind=link}
{kind=link}