
Balancing Tradeoffs in Network Queue Management Problem via Forward–Backward Sweeping with Finite Checkpoints

Abstract
:1. Introduction
- From the Optimal Control Queue model (OCQ) of a network queue, with the objective of minimizing a weighted cost function of queue length and drop rate, we propose to solve it using an indirect method and derive a Forward–Backward Sweeping Method FBSM-AQM scheme (Section 3.1 and Section 5).
- We extend this method with checkpointing (FBSM-AQM-CP), which can deal with the trade-off between the memory usage and runtime of an algorithm by choosing a finite checkpoint (Section 6).
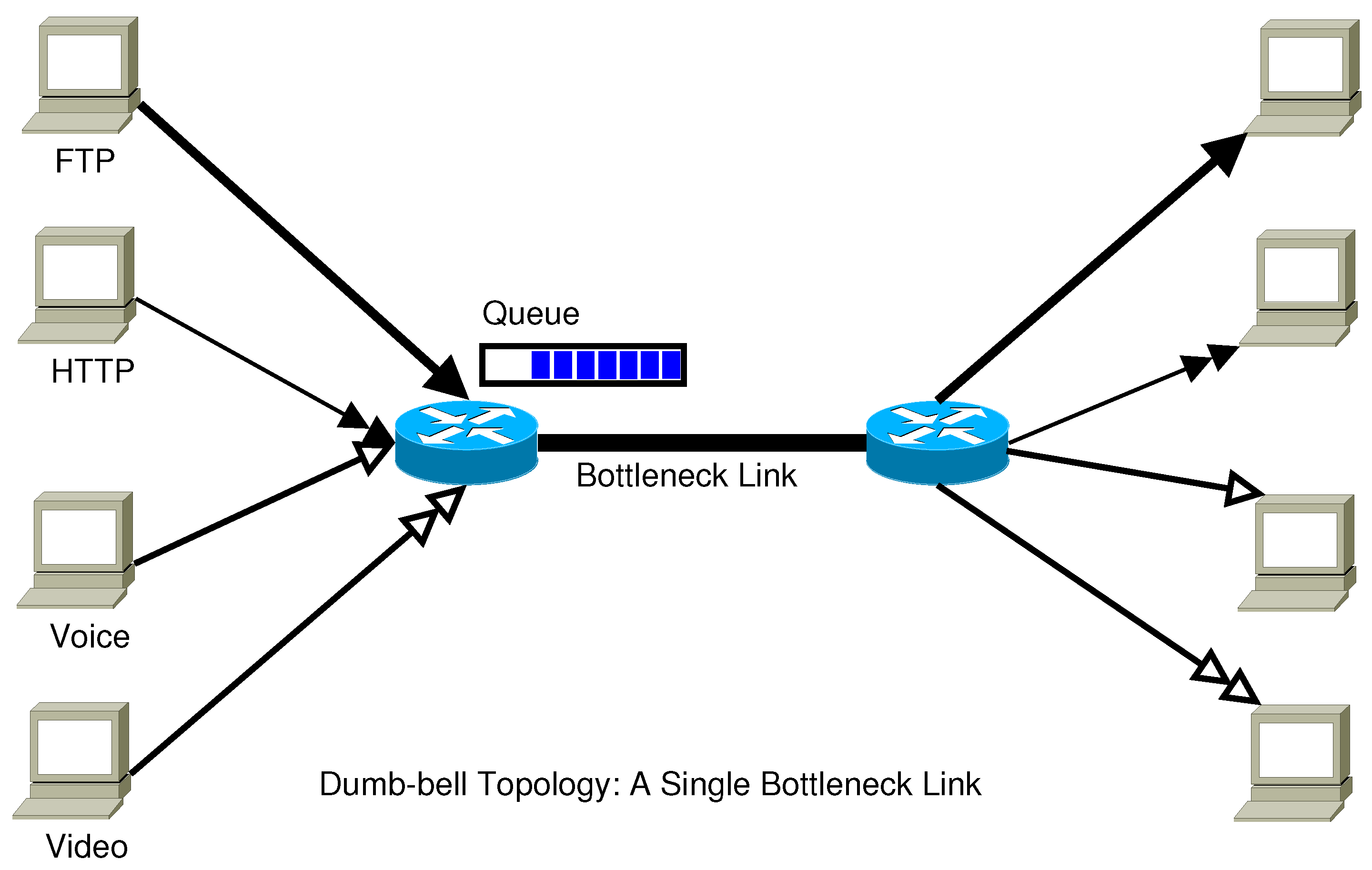
- We conduct and provide numerical and simulation results (ns2) to evaluate the proposed method FBSM-AQM-CP under dumb-bell network topology. We then suggest for designers a choice for the number of checkpoints to balance performance in Section 7.1 and Section 7.3.
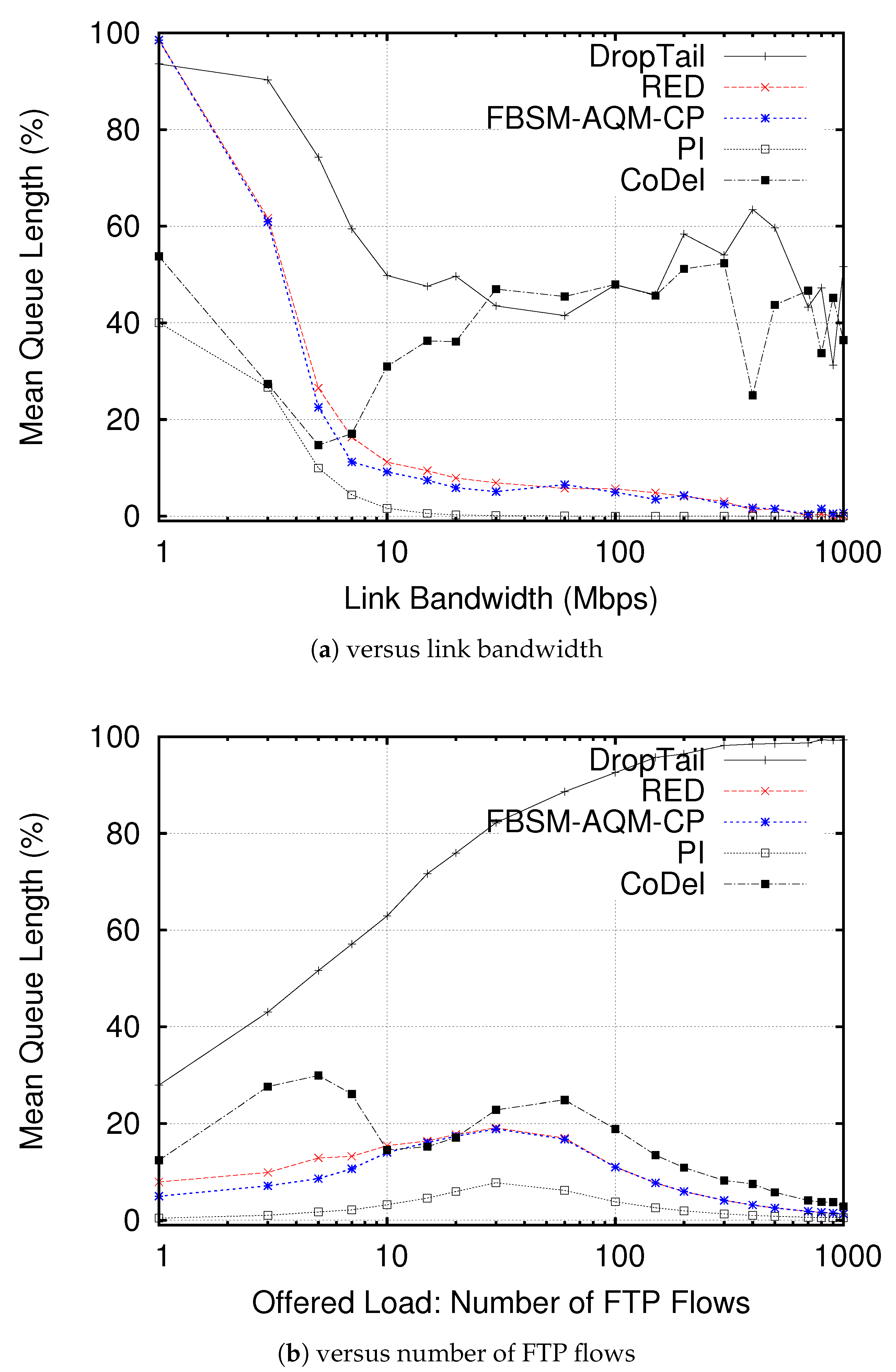
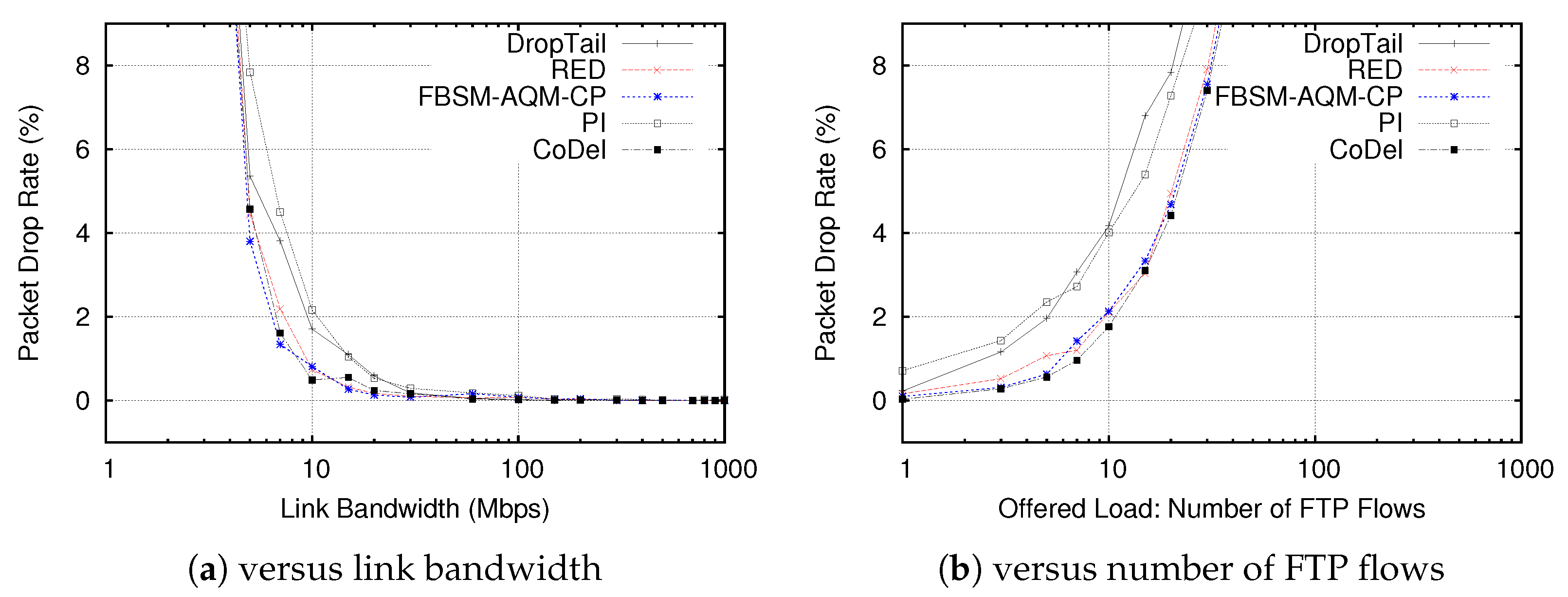
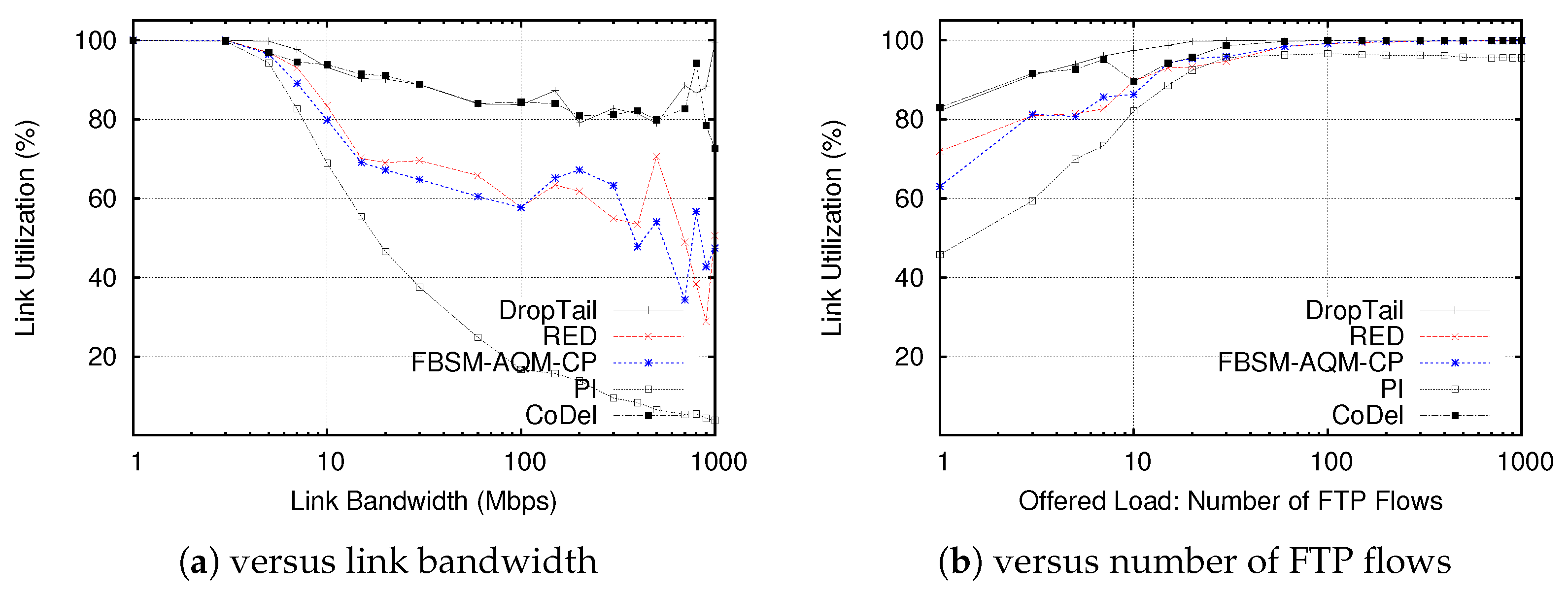
- The simulation results in Section 7.3 give some insights into the performance of our proposed AQM scheme and the others to be compared: queue length, packet drop rate and link utilization.
2. Related Works
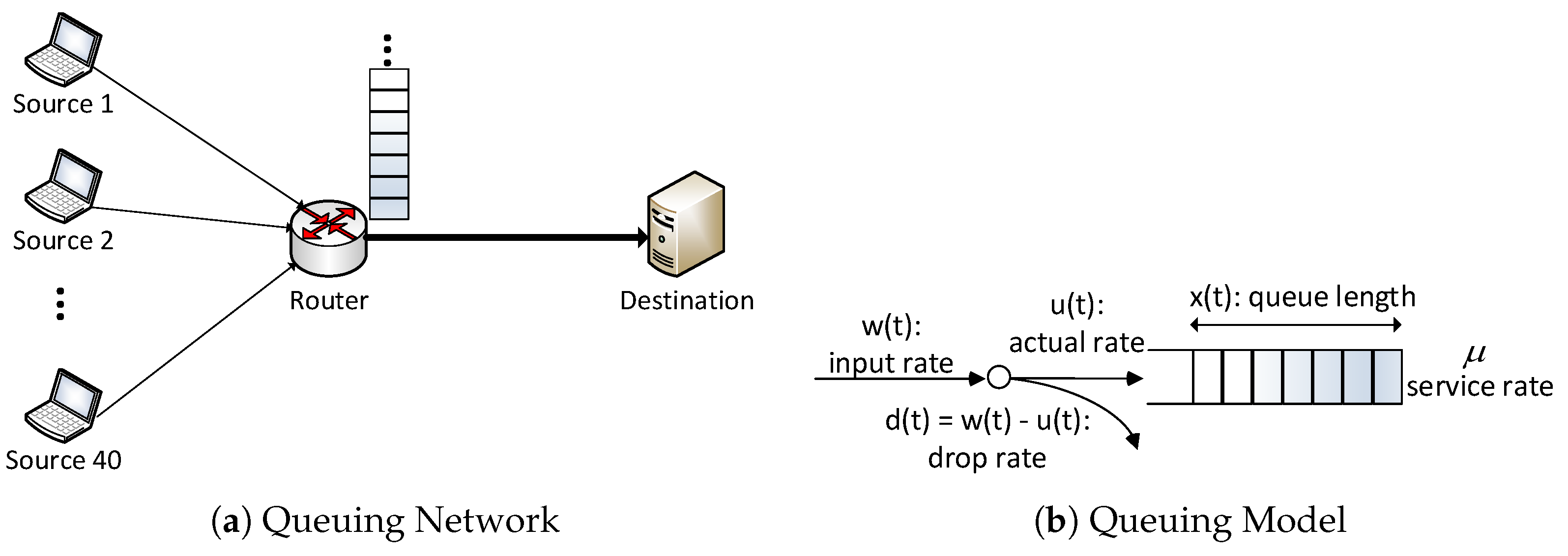
3. Model Description of Optimal Control Queue Model
3.1. Characterization of Optimal Control
4. Forward–Backward Sweeping Method (FBSM)
| Algorithm 1 FBSM-AQM. |
|
5. FBSM-AQM without Checkpointing
| Algorithm 2 FBSM-AQM-NoCP. |
|
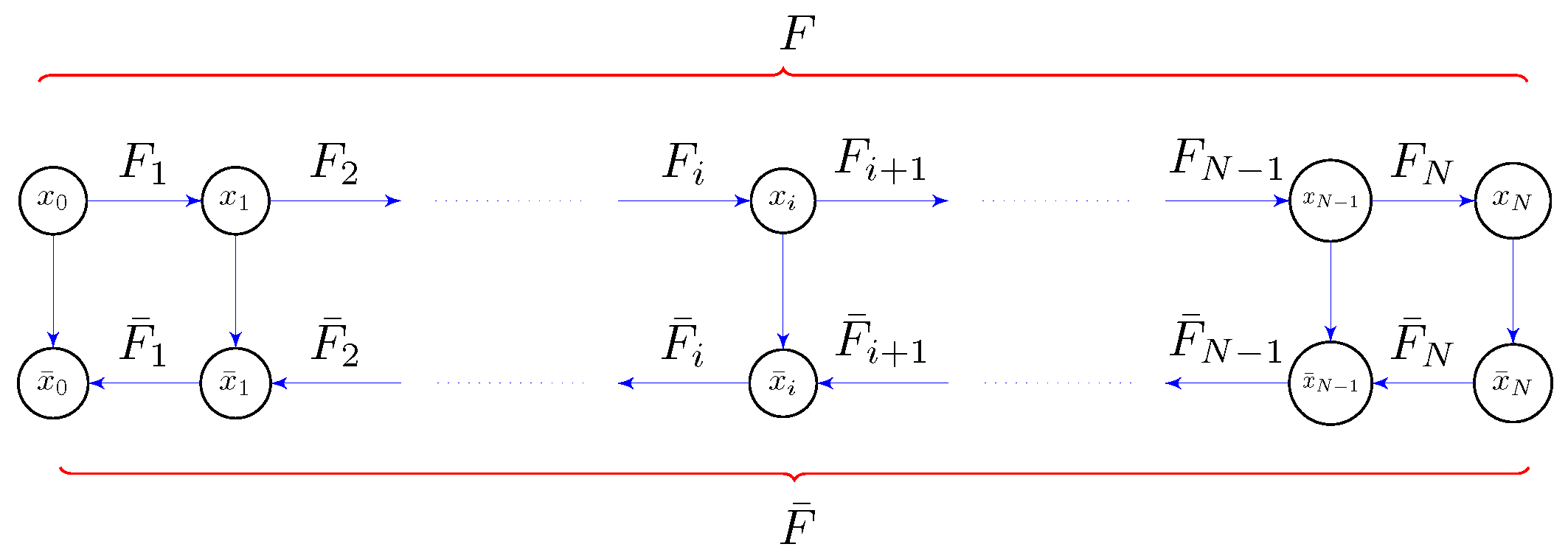
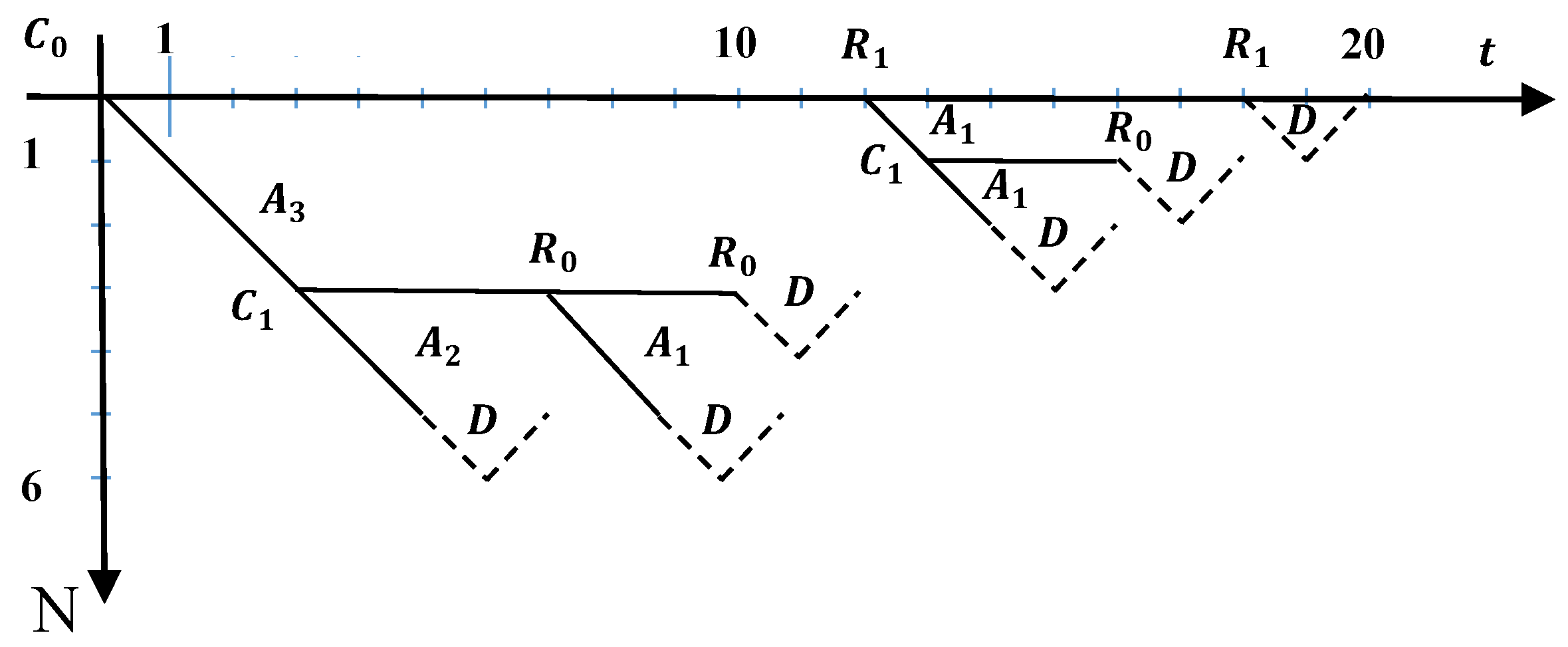
6. FBSM-AQM with Checkpointing
- Advance operation = make forward computations by increment i by ;
- Takeshot operation = memorize state i to checkpoint ;
- Restore operation = reset i to checkpoint ;
- Firs-turn and youturn operations D= do the first reversal step if and one reversal step by decrement N by 1 if , respectively.Up to N has been reduced to zero.
7. Performance Evaluation and Discussion
7.1. Tradeoff: Runtime & Memory Usage
7.2. Comparison: AQM Schemes
- DropTail
- Random Early Detection (RED)
- Proportional Integral (PI)
- Controlled Delay (CoDel)
7.3. Comparison: Results
7.3.1. Mean Queue Length
7.3.2. Packet Drop Rate
7.3.3. Link Utilization
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gettys, J. Bufferbloat: Bufferbloat: Dark Buffers in the Internet. Internet Comput. IEEE. 2011, 15, 96. [Google Scholar] [CrossRef] [Green Version]
- Jahwan, K.; Seongjin, A.; Jinwook, C. A comparative study of queue, delay, and loss characteristics of AQM schemes in QoS-enabled networks. Comput. Artif. Intell. 2004, 23, 317–335. [Google Scholar]
- Hollot, C.V.; Misra, V.; Towsley, D.; Gong, W.-B. A control theoretic analysis of RED. In Proceedings IEEE INFOCOM 2001, Proceedings of the Conference on Computer Communications. Twentieth Annual Joint Conference of the IEEE Computer and Communications Society (Cat. No.01CH37213), Anchorage, AK, USA, 22–26 April 2001; IEEE: Manhattan, NY, USA, 2001. [Google Scholar]
- Danielson, C.; Borrelli, F. Symmetric constrained optimal control. IFAC Pap. Online 2015, 48, 366–371. [Google Scholar] [CrossRef]
- Griewank, A.; Walther, A. Algorithm 799: Revolve: An Implementation of Checkpointing for the Reverse or Adjoint Mode of Computational Differentiation. ACM Trans. Math. Softw. 2000, 26, 19–45. [Google Scholar] [CrossRef]
- Griewank, A. Achieving Logarithmic Growth Of Temporal And Spatial Complexity In Reverse Automatic Differentiation. Optim Methods Softw. 1992, 1, 35–54. [Google Scholar] [CrossRef]
- Griewank, A.; Walther, A. Evaluating Derivatives: Principles and Techniques of Algorithmic Differentiation, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2008; 460p. [Google Scholar]
- Kulkarni, P.; Nazeeruddin, M.; McClean, S.; Parr, G.; Black, M.; Scotney, B.; Dini, P. Deploying Lightweight Queue Management for improving performance of Mobile Ad-hoc Networks (MANETs). In Proceedings of the 2006 International Conference on Networking and Services (ICNS 2006), Silicon Valley, CA, USA, 16–21 July 2006; p. 102. [Google Scholar]
- Kumar, K.D.; Ramya, I.; Masillamani, M.R. Queue Management in Mobile Adhoc Networks (Manets). In Proceedings of the IEEE/ACM Int’l Conference on Green Computing and Communications & Int’l Conference on Cyber, Physical and Social Computing, Hangzhou, China, 18–20 December 2010. [Google Scholar]
- May, M.; Bolot, J.; Diot, C.; Lyles, B. Reasons Not to Deploy RED. In Proceedings of the Seventh International Workshop on Quality of Service. IWQoS’99 (Cat. No. 98EX354), London, UK, 31 May–4 June 1999. [Google Scholar]
- Iyer, M.; Tsai, W.K. Time-optimal network queue control: The case of a single congested node. In Proceedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No. 03CH37428), San Francisco, CA, USA, 30 March–3 April 2003. [Google Scholar]
- Hassan, M.; Sirisena, H. Optimal control of queues in computer networks. In Proceedings of the IEEE International Conference on Communications, Conference Record (Cat. No. 01CH37240), Helsinki, Finland, 11–14 June 2001. [Google Scholar]
- Floyd, S.; Jacobson, V. Random early detection gateways for congestion avoidance. Netw. IEEE/ACM Trans. 1993, 1, 397–413. [Google Scholar] [CrossRef]
- Kahe, G.; Jahangir, A.H.; Ebrahimi, B. A compensated PID active queue management controller using an improved queue dynamic model. Int. J. Commun. Syst. 2014, 27, 4543–4563. [Google Scholar] [CrossRef]
- Adams, R. Active Queue Management: A Survey. Commun. Surv. Tutor. IEEE 2013, 15, 1425–1476. [Google Scholar] [CrossRef]
- Ren, F.; Lin, C.; Wei, B. Design a robust controller for active queue management in large delay networks. In Proceedings of the Ninth International Symposium on Computers And Communications (IEEE Cat. No. 04TH8769), Alexandria, Egypt, 28 June–1 July 2004. [Google Scholar]
- Xiang, S.; Xu, B.; Wu, S.; Peng, D. Gain Adaptive Smith Predictor for Congestion Control in Robust Active Queue Management. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006. [Google Scholar]
- Zhu, R.; Teng, H.; Fu, J. A predictive PID controller for AQM router supporting TCP with ECN. In Proceedings of the 2004 Joint Conference of the 10th Asia-Pacific Conference on Communications and the 5th International Symposium on Multi-Dimensional Mobile Communications Proceeding, Beijing, China, 29 August–1 September 2004. [Google Scholar]
- Jinsheng, S.; Zukerman, M.; Palaniswami, M. Stabilizing RED using a Fuzzy Controller. In Proceedings of the 2007 IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007. [Google Scholar]
- Rong, P.; Natarajan, P.; Piglione, C.; Prabhu, M.S.; Subramanian, V.; Baker, F.; VerSteeg, B. PIE: A lightweight control scheme to address the bufferbloat problem. In Proceedings of the 2013 IEEE 14th International Conference on High Performance Switching and Routing (HPSR), Taipei, Taiwan, 8–11 July 2013. [Google Scholar]
- Nichols, K.; Van, J. Controlling Queue Delay. Acmqueue 2012, 10, 20–34. [Google Scholar]
- To, H.L.; Thi, T.M.; Hwang, W.J. Cascade Probability Control to Mitigate Bufferbloat under Multiple Real-World TCP Stacks. Math. Probl. Eng. 2015, 2015, 628583. [Google Scholar] [CrossRef] [Green Version]
- Jin, H.-L.; Di, T.-L.; Yu, H.; Zhang, R.-R. On the τ Decomposition Method for the Stability and Bifurcation of the TCP/AQM Networks versus Time Delay. Symmetry 2022, 14, 463. [Google Scholar] [CrossRef]
- Teo, K.L.; Li, B.; Yu, C.; Rehbock, V. Applied and Computational Optimal Control; Springer Optimization and Its Applications Springer: Cham, Switzerland, 2021. [Google Scholar]
- Guffens, V.; Bastin, G. Optimal adaptive feedback control of a network buffer. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Radwan, A.; Hoang-Linh, T.; Won-Joo, H. Optimal Control for Bufferbloat Queue Management Using Indirect Method with Parametric Optimization. Sci. Program. 2016, 2016, 4180817. [Google Scholar] [CrossRef] [Green Version]
- Radwan, A.; Vasilieva, O.; Enkhbat, R.; Griewank, A.; Guddat, J. Parametric approach to optimal control. Optim. Lett. 2012, 6, 1303–1316. [Google Scholar] [CrossRef]
- Sternberg, J.; Griewank, A. Reduction of Storage Requirement by Checkpointing for Time-Dependent Optimal Control Problems in ODEs. In Automatic Differentiation: Applications, Theory, and Implementations; Springer: Berlin/Heidelberg, Germany, 2006; Volume 50, pp. 99–110. [Google Scholar]
- Issariyakul, T.; Hossain, E. Introduction to Network Simulator NS2, 2nd ed.; Springer Publishing Company, Incorporated: New York, NY, USA, 2011; 536p. [Google Scholar]
- Reddy, T.B.; Ahammed, A. Performance Comparison of Active Queue Management Techniques. J. Comput. Sci. 2008, 4, 1020–1023. [Google Scholar] [CrossRef] [Green Version]
- Braden, B.; Clark, D.; Crowcroft, J.; Davie, B.; Deering, S.; Estrin, D.; Floyd, S.; Jacobson, V.; Minshall, G.; Partridge, C.; et al. RFC2309: Recommendations on Queue Management and Congestion Avoidance in the Internet; RFC Editor: Marina del Rey, CA, USA, 1998. [Google Scholar]
- Gang, W.; Yong, X.; David, H. An NS2 TCP Evaluation Tool. In Internet-Draft IETF; IETF: Fremont, CA, USA, 2007; 15p. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Role |
|---|---|---|
| a | parameter for different type of queueing model; | Constant |
| here, , for the sake of simplicity, | ||
| to model an M/M/1 queue. | ||
| service rate (bandwidth capacity); | Constant | |
| u | dropping rate | Control variable |
| x | queue length | State variable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radwan, A.; Alenezi, T.A.; Alrashdan, W.; Hwang, W.-J. Balancing Tradeoffs in Network Queue Management Problem via Forward–Backward Sweeping with Finite Checkpoints. Symmetry 2023, 15, 1395. https://doi.org/10.3390/sym15071395
Radwan A, Alenezi TA, Alrashdan W, Hwang W-J. Balancing Tradeoffs in Network Queue Management Problem via Forward–Backward Sweeping with Finite Checkpoints. Symmetry. 2023; 15(7):1395. https://doi.org/10.3390/sym15071395
Chicago/Turabian StyleRadwan, Amr, Taghreed Ali Alenezi, Wejdan Alrashdan, and Won-Joo Hwang. 2023. "Balancing Tradeoffs in Network Queue Management Problem via Forward–Backward Sweeping with Finite Checkpoints" Symmetry 15, no. 7: 1395. https://doi.org/10.3390/sym15071395