3.1. The Continuous Measure of Symmetry and Its Calculation
Let us become acquainted with the continuous measure of symmetry, as it was defined and developed by Zabrodsky, Peleg, and Avnir [
10,
11,
12,
13,
14]. Consider a non-symmetrical shape consisting of
points
,
and a given symmetry group, denoted as
. The continuous symmetry measure, labeled CMS and denoted as
is determined by the minimal average square displacement of the points,
, that the shape has to undergo in order to acquire the prescribed
G-symmetry; seen as the minimum effort required to transform a given shape into a symmetrical shape. Rigorously speaking, the symmetry measure of the
-symmetry point group’s content
of an object is a function of the distance between the original structure and a searched
-symmetric reference structure; of the same point objects and connectivity, and which is the closest to the original distorted structure [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19].
Assume that the
-symmetrical shape emerges from the set of points
. Since the set
is established, a CMS is defined as
where
is the distance between the center of mass to the vertex of the closest equilateral triangle, which is used for the normalization of the CMS (the squared values in Equation (1) supply a function that is isotropic, continuous, and differentiable; it should be mentioned that after normalization 0
is true). The continuous measure of symmetry defined using Equation (1) is a dimensionless value. At the first step, the points of the nearest shape demonstrating the
-type symmetry must be established. An algorithm that identifies the set of points
that constitute this symmetrical shape was introduced in [
6,
7,
8,
9,
10,
11].
Figure 1 depicts an equilateral triangle
representing the symmetric shape that corresponds to the given non-symmetric triangle
.
The transformation of the non-symmetric triangle
to the symmetric equilateral triangle
is performed as follows: vertex
is rotated counterclockwise around the common centroid
of triangle
by
radians (one vertex of triangle
remains fixed); thus, triangle
emerges. Next, the location of the centroid
of the intermediate triangle
is determined. Centroid
is then rotated clockwise around the centroid
by
radians (for the details see [
14]).
Therefore, the equilateral triangle
shown in
Figure 1 represents the closest symmetrical shape to the pristine non-symmetrical triangle
[
6,
7,
8,
9,
10,
11,
12,
13,
14]. Since the set
is established, the CMS is calculated using Equation (1) (the importance of the normalization procedure should be emphasized). The equilateral Lagrange triangle supplying the solution to the three-body problem hints to the effectiveness of the use of CMS for the solution of the three-body problem [
1,
2].
3.2. Symmetrized Equations of Motion for the Three-Body Problem
Consider the three-body problem for a set of three gravitating masses
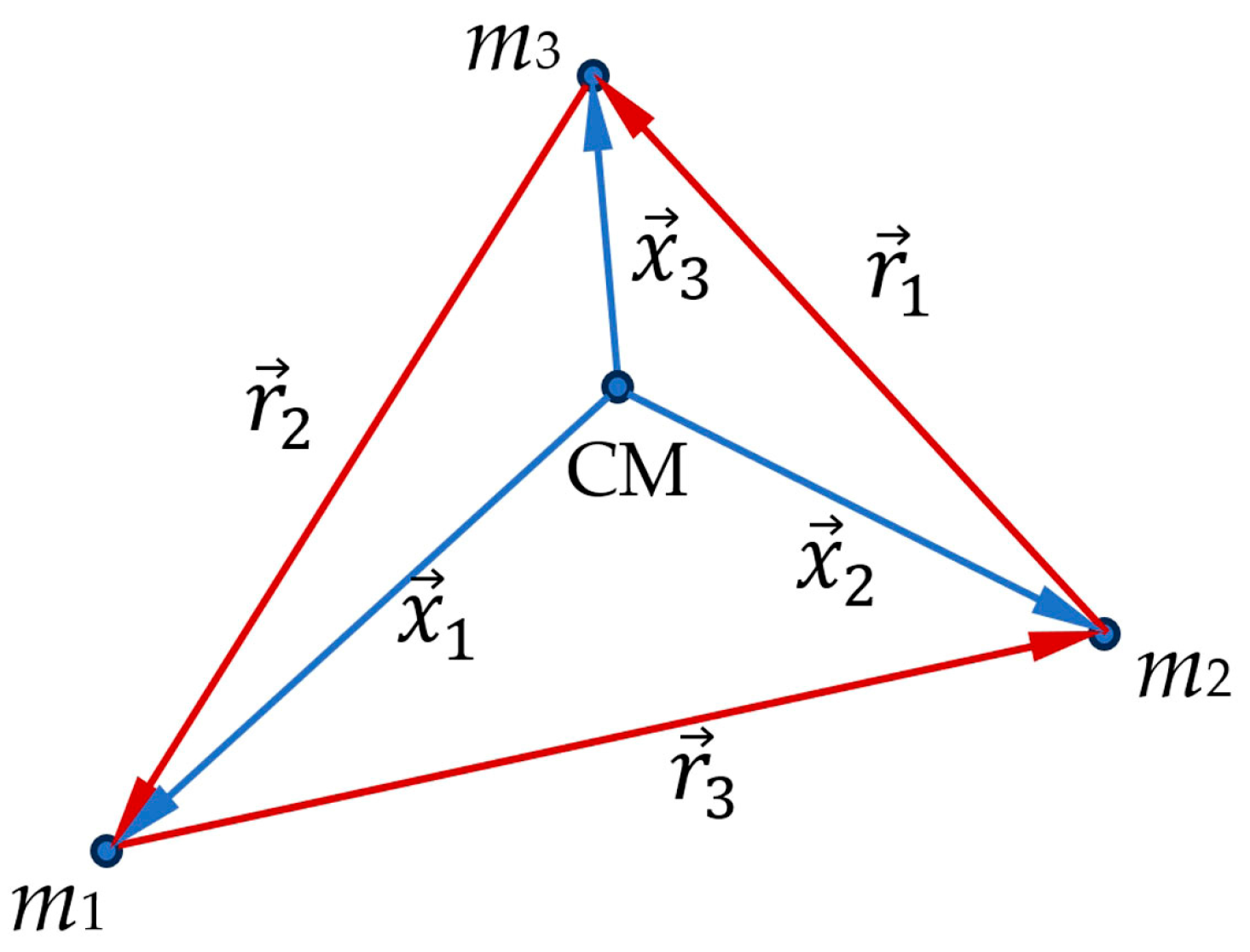
In the center-of-mass frame, the equations of motion of the point gravitating masses appear as follows:
where
are the coordinates of the masses in the center-of-mass frame defined by
=0;
=0, as illustrated in
Figure 2, and
G is the gravitational constant.
Broucke and Lass suggested the procedure of symmetrization of Equation (2), with the use of the vectors of the relative locations of the masses,
(vector
corresponds to the side opposite the apex of the triangle occupied by mass
, see
Figure 2). Equation (3) is obviously true for vectors
Introducing vectors
yields the equations of motion re-shaped and symmetrized as follows:
where
is the total mass of the system and vector
is defined by Equation (5):
The first term in Equation (4) is identical to that appearing in the standard two-body Kepler problem, whereas the second term in Equation (4) generates the complexity of the evergreen three-body problem. The Lagrange solution of the problem corresponds to the case when
r1 =
r2 =
r3 takes place. In this situation
is true. Thus, the three-body problem is reduced to the two-body one, and the gravitating masses remain in the vertices of an equilateral triangle. The triangle may change its size and rotate; gravitating masses are moving along ellipses with different eccentricities; however, they are oriented at different angles to one another [
22]. The motion of the gravitating masses in this case is periodic, with the same period for all of the masses. It should be emphasized that the aforementioned Lagrange solution remains stable only if one of the masses is much larger than other two [
23,
24].
3.3. Extension of the Problem to the Coulomb Interaction
Consider the system of three point charges
possessing the corresponding masses
. For a sake of simplicity, we assume that the motion of the point charges is slow; thus, the electrodynamic interaction between the charges may be neglected and only the electrostatic and gravitational interactions between the bodies are essential. We consider the case in which the initial velocities of the interacting bodies are zero; thus, our approach will be true at least at the initial stage of the motion, when the velocities of the bodies are still small (very roughly speaking, it is true when
is true, where
v is the velocity of the charge and
c is the velocity of light in a vacuum). The vector equations of motion in this non-relativistic case appear as follows:
where
K is the Coulomb constant. To make the problem even more simple, we also assume
and, thus, the gravitational interaction is negligible (obviously, this case has nothing to do with celestial mechanics); this simple case yields interesting and understandable results. Hence, the equation of motion is re-written as follows:
The symmetrical coordinates introduced and discussed in detail in the previous section yield, in turn, Equation (8) [
9]:
In the case where
takes place, we obtain this from Equations (8) and (9), which resembles Equation (4), namely:
where
is the total electrical charge of the system and vector
is defined using Equation (5). Equation (9) immediately leads to the conclusion that the solution of the three-body problem, similar to that suggested by Lagrange, exists in the case when the interaction between the bodies is the pure electrostatic/Coulomb one. The Lagrange triangle appears as a solution of the three-body problem when the electrical charges of the same sign are initially placed in the vertices of an equilateral triangle, and the condition
takes place.
3.4. Considering Friction and Dissipative Processes
Now we consider the impact of the dissipative forces on the time evolution of the CMS.
Assume that the Stokes-like friction force
acts on the interacting bodies, i.e.,
= −
takes place, where
is the friction factor and
is the velocity of
i-th body. Generally speaking, the friction factors may be various for the different interacting bodies. Equation (6), considering the friction force, yields Equation (10):
Thus, Equation (2) is re-shaped as follows:
Vector
is re-written as Equation (12) (similarly to Equation (4)):
We assume
b1/
m1 =
b2/
m2 =
b2/
m2 =
const =
γ; thus, the second term in Equation (12) appears as follows:
and we derive Equation (14), resembling Equation (4). However, considering the dissipative friction forces:
when the bodies are initially located in the vertices of the equilateral triangle
, and consequently we derive
In parallel to Equation (14), we obtain, for the Coulomb interactions, Equation (16):
which resembles Equation (15) for the equilateral Lagrange triangle. Equation (15) is the second-order nonlinear ordinary differential equation. The exact solution of the three-body problem, considering the dissipation forces and similar to that suggested by Lagrange, exists only when the condition
is fulfilled and the condition
takes place. For a sake of simplicity, we consider in our treatment the case where
b1 =
b2=
b3 =
b is true.
3.5. The Three-Body Problem and the Continuous Measure of Symmetry
The three-body problem in its general case has no analytical solution. We studied, with the computer simulations, the evolution of the continuous measure of symmetry of the three-body systems interacting via the Newtonian–Coulomb potential
. We also considered the situations in which friction is present [
7]. The initial location of the point bodies/charges was slightly shifted from their initial configuration, constituting the equilateral triangle (the so-called “Lagrange triangle”). Computer simulations were carried out with the software “Taylor Center”, version 42;
http://taylorcenter.org/Gofen/TaylorMethod.htm [
20,
21], accessed on 1 January 2023.
Gravitational and Coulomb interactions were considered. In the first series of computer experiments, the displacement of bodies from their initial location was 5%, as shown in
Figure 3. In the second series of the numerical experiments, the mass-to-charge ratio of the interacting particles was varied. In the third series of simulations, the location of the particles and their charge-to-mass ratio were varied simultaneously.
We start from the first series of computer experiments, in which pure gravitational interaction between the bodies is assumed. The displacement of the bodies from their initial location is illustrated in
Figure 3; we shift the bodies along the coordinate axes.
corresponds to the displacement of the mass
to the right (in the positive direction of axis
x), whereas
corresponds to the displacement of the mass
to the left (in the negative direction of axis
x).
Simple combinatory analysis demonstrates that there exists in total 64 possibilities of the distortion of the initial equilateral triangle, when locations of all of the vertices are perturbed; we do not report here the exhaustive analysis of all of the possible deformations of the Lagrange triangle, as we are focused on some of the illustrative examples of the general three-body problem. In all of the cases, the continuous measure of symmetry (see
Section 2) was taken as a dynamic variable, i.e.,
was calculated, quantifying the distortion of the initial equilateral Lagrange triangle under the motion governed by gravitational or Coulomb forces (see Equations (4) and (9)). Consider Example #1, in which three bodies interact via a pure gravitational interaction, and
is assumed, as shown in
Figure 3 is assumed for the sake of simplicity). The initial positions of the gravitating bodies are
m1(1.05, 0),
m2(cos(π/3), sin(π/3)), and
m3(cos(2π/3), sin(2π/3)); the initial velocities are zero and friction is absent, i.e.,
The motion of two sets of dimensionless masses was analyzed, namely:
m1 = m2= m3 = 1 and
m1 = 3,
m2 = 4,
m3 = 5. The results of the calculations for both sets of masses are supplied in
Figure 4.
Figure 4 reveals a number of very important qualitative conclusions: (i) Irrespective of the interrelation between the gravitating masses, the distortion of the Lagrange triangle destroys the symmetry of the systems and results in the gravitational collapse of the system; the situation
corresponds to the disappearance of the one of the sides of the triangle, as will be shown below. (ii) The destruction of the symmetry is not immediate; systems demonstrate a certain stability until some threshold value of distortion. The calculation of this value needs additional physical and computational insights, which are not covered in the present paper. It is noteworthy that there exists a 3D extension of the Lagrange triangle, and it is the Lagrange tetrahedron, where four gravitating bodies are located at its vertices.
Now consider the impact of friction on the time evolution of the CMS. The initial positions of the gravitating bodies are
m1(1.05, 0),
m2(cos(π/3), sin(π/3)), and
m3(cos(2π/3), sin(2π/3)); the initial velocities are zero; the dimensionless friction factor is varied in the range
The motion of the two sets of dimensionless masses is analyzed, namely:
m1 = m2= m3 = 1. The results of the calculations for both sets of masses are supplied in
Figure 5.
Again, we conclude that the distortion of the Lagrange triangle destroys the symmetry of the system and results in the gravitational collapse of the system; and this remains true in the presence of friction. An increase in friction shifts the degradation of symmetry in tim; in other words, friction, as it may be expected, increases the stability of the Lagrange triangle.
3.6. The Coulomb Interaction, the Three-Body Problem, and the Continuous Measure of Symmetry
Now we consider the slightly deformed Lagrange triangle
is true for one of the vertices). The point charges
are located in the vertices of the triangle; the initial velocities of the charges are zero. We address the situation in which electrodynamic interactions are neglected, and the Coulomb interactions dominate over gravitational ones (the Coulomb constant is equaled to unity). The masses of the bodies and their charges are
m1 = m2= m3 = 1;
q1 = q2 = q3 = 1; and friction is absent, i.e.,
b = 0. The equations of motion are supplied by Equation (9). The results of the computer simulations, which establish the time evolution of the CMS, denoted
are supplied in
Figure 6.
The time evolution of CMS demonstrates, in both of the cases, an identical behavior, which may be described as follows: the systems start with a non-zero value of the CMS (the initial Lagrange triangle is distorted); afterwards, the charges came to the vertices of the equilateral triangle (CMS equals zero, see
Figure 6), and afterwards the CMS grew and attained an asymptotic value. This result is intuitively clear: consider that only the repulsive Coulomb forces act between the point charges; these forces are weakened over the course of motion of the charges; thus, the shape of the triangle constituted by the charges is stabilized, and consequently the CMS attains its asymptotic value. This non-obvious result is of primary importance, enabling the qualitative characterization of the configuration of the moving point charges. The charges come to the vertices of the equilateral triangle with non-zero velocities, and thus, they pass these points and continue to move, driven by the repulsive Coulomb forces, finally obtaining the configuration quantified by the asymptotic value of the CMS. We will demonstrate that the asymptotic behavior of the CMS is observed for various interrelations between the charges and masses of the interacting bodies.
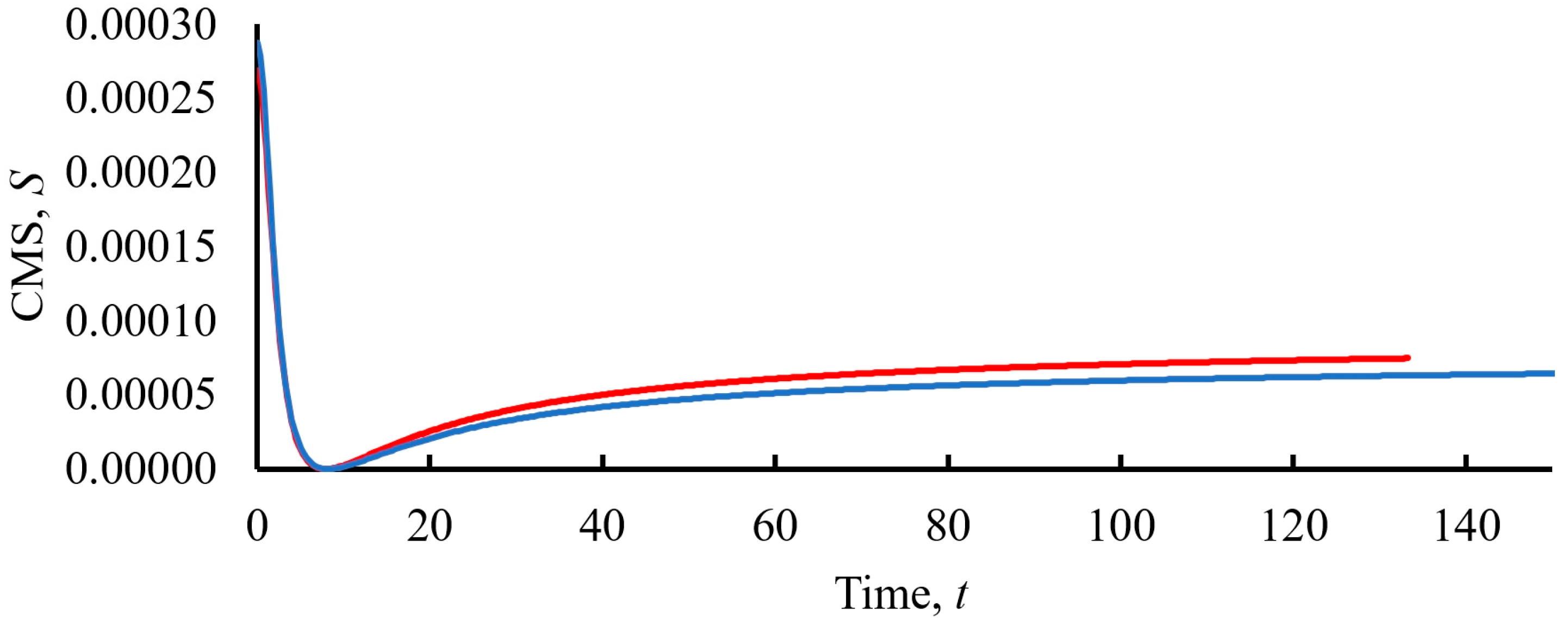
Consider now the situation in which
m1 >> m2= m3 and
q1 >> q2 = q3 takes place. These conditions are similar to those inherent for the stable Lagrange solution of the three-body problem [
1,
2]. The time evolution of the continuous measure of symmetry for this case is depicted in
Figure 7.
In this situation, the initial CMS is decreased over the course of motion of the electrically charged bodies, and it comes to its saturation value depending on the initial distortion of the Lagrange triangle, as shown in
Figure 7. Again, only repulsive Coulomb interactions are present in the system; the Coulomb repulsion is decreased with time and eventually the CMS attains its saturation value, quantifying the distortion of the initial triangle.
We also varied, in our computer experiments, the charge of one of the point masses
were tested numerically). In these experiments the charges were placed in the vertices of the undistorted equilateral Lagrange triangle. The time evolution of the CMS is shown in
Figure 8.
In this case, the initial value of the CMS is zero (the initial Lagrange triangle is equilateral). The value of the CMS grows over the course of motion of the charges and comes to saturation, as shown in
Figure 8.
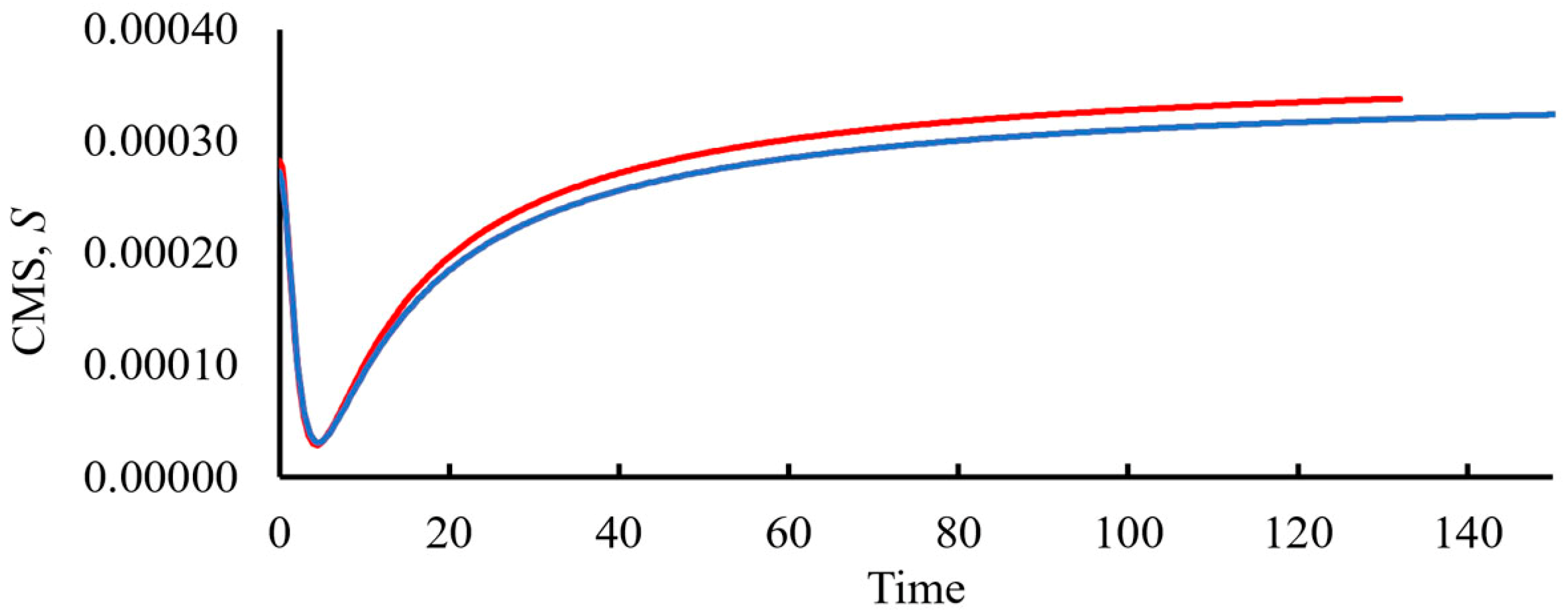
We also tested the situation in which the initial Lagrange triangle was slightly distorted and the charge-to-mass ratio of one of the charges was also slightly different from that prescribed for the other charges. The time evolution of the CMS in this case is shown in
Figure 9.
The time evolution of the CMS in this case is similar to that shown in
Figure 6, namely, the systems start with a non-zero value of the CMS (the initial Lagrange triangle is distorted); afterwards, the charges come to the vertices of the equilateral triangle with non-zero velocities (CMS equals zero, see
Figure 9), and afterwards the CMS grows with time and attains its asymptotic value.
Now we perturb the geometrical symmetry and the charge-to-mass ratio for different vertices of the initial Lagrange triangle, namely, we assume
x1 = 1.05 and
q2 = 0.95 and
x1 = 0.95 and
q2 = 1.05; friction is absent,
The temporal evolution of the CMS is illustrated in
Figure 10.
The time evolution of the CMS resembles qualitatively the behavior of the CMS depicted in
Figure 9; however, the CMS does not attain zero as its minimal value, as it recognized from
Figure 10.
The qualitative description of the change in the shape of the initial Lagrange triangle is illustrated in
Figure 11, which supplies the main types of the time evolution of the Lagrange triangle.
Now we consider the situation already addressed in
Figure 8, where the Stokes-like friction is taken into account. The time evolution of the CMS is shown in
Figure 12.
The time evolution of the continuous measure of symmetry was calculated for the system of the point charges located in the vertices of the non-distorted equilateral Lagrange triangle. The friction factor was varied in the range
. We recognize, from
Figure 12, that friction decreases the saturation value of the CMS, and this is intuitively well expected. It is also noteworthy that the increase in friction decreases the saturation values of the CMS; in other words, friction promotes more symmetrical eventual shapes in the addressed systems.
Now, similarly to the case addressed in
Figure 9, we perturb the geometrical symmetry and, in parallel, we perturb the charge-to-mass ratio for different vertices of the initial Lagrange triangle, namely we assume
m1 = m2= m3 = 1,
x1 = 1.05, and
q1 = 1.05.
The friction factor is varied in the range
The temporal evolution of the CMS in this case is illustrated in
Figure 13. In this case, two ranges of the friction factor are distinguished: namely, when
the saturation value of the CMS is decreased with the growth of
b; in contrast (see
Figure 13A), when 0.25
the saturation value of CMS is increased with the growth of
b (see
Figure 13B). The interpretation of this observation calls for additional insights.
Perhaps the most surprising and intriguing result was obtained for the friction factor restricted within the range of
This result is illustrated in
Figure 14.
Somewhat surprisingly, for
the twin well-shaped time dependence of the CMS was observed, as depicted in
Figure 14. This means that the perturbed triangle formed by the bodies twice comes to the equilateral Lagrangian shape. The origin of the twin well-shaped curve, depicted in
Figure 14, calls for additional physical insights.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













