
Elastic Wave Mechanics in Damaged Metallic Plates



Abstract
:1. Introduction
2. Theory of Lamb Wave Generation and Propagation in Thin Structures
2.1. Nondestructive Evaluation Technique
2.2. Directivity and Attenuation of the Lamb Wave
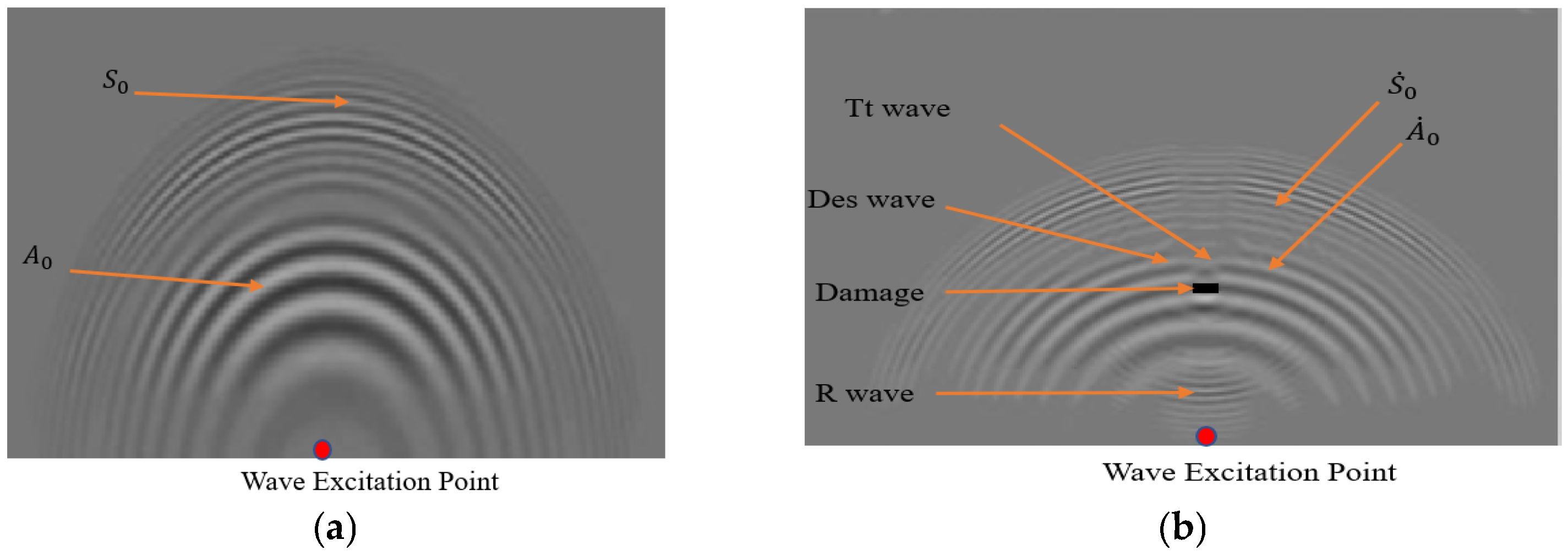
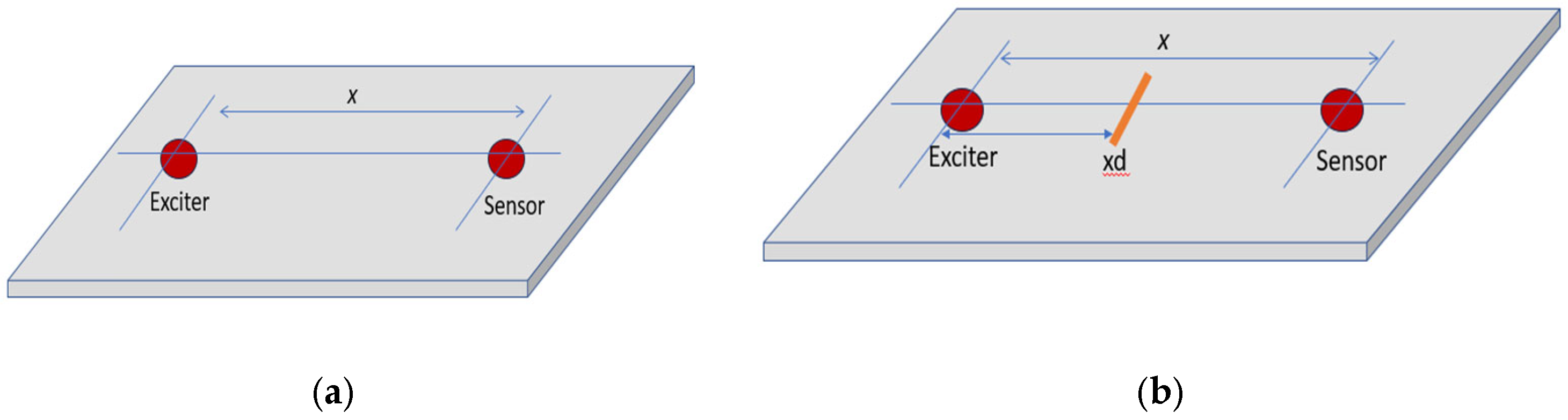
2.3. Modelling Damage Detection Evaluation
2.4. Transmission Coefficient (TC)
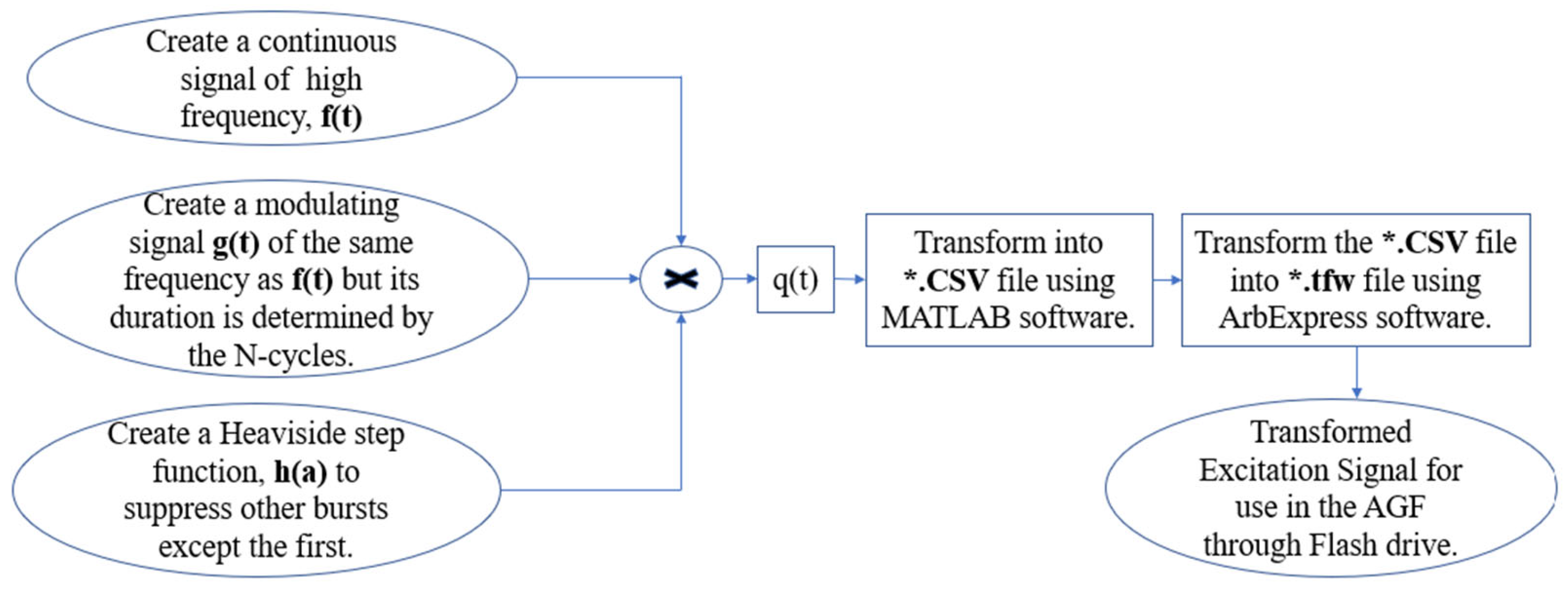
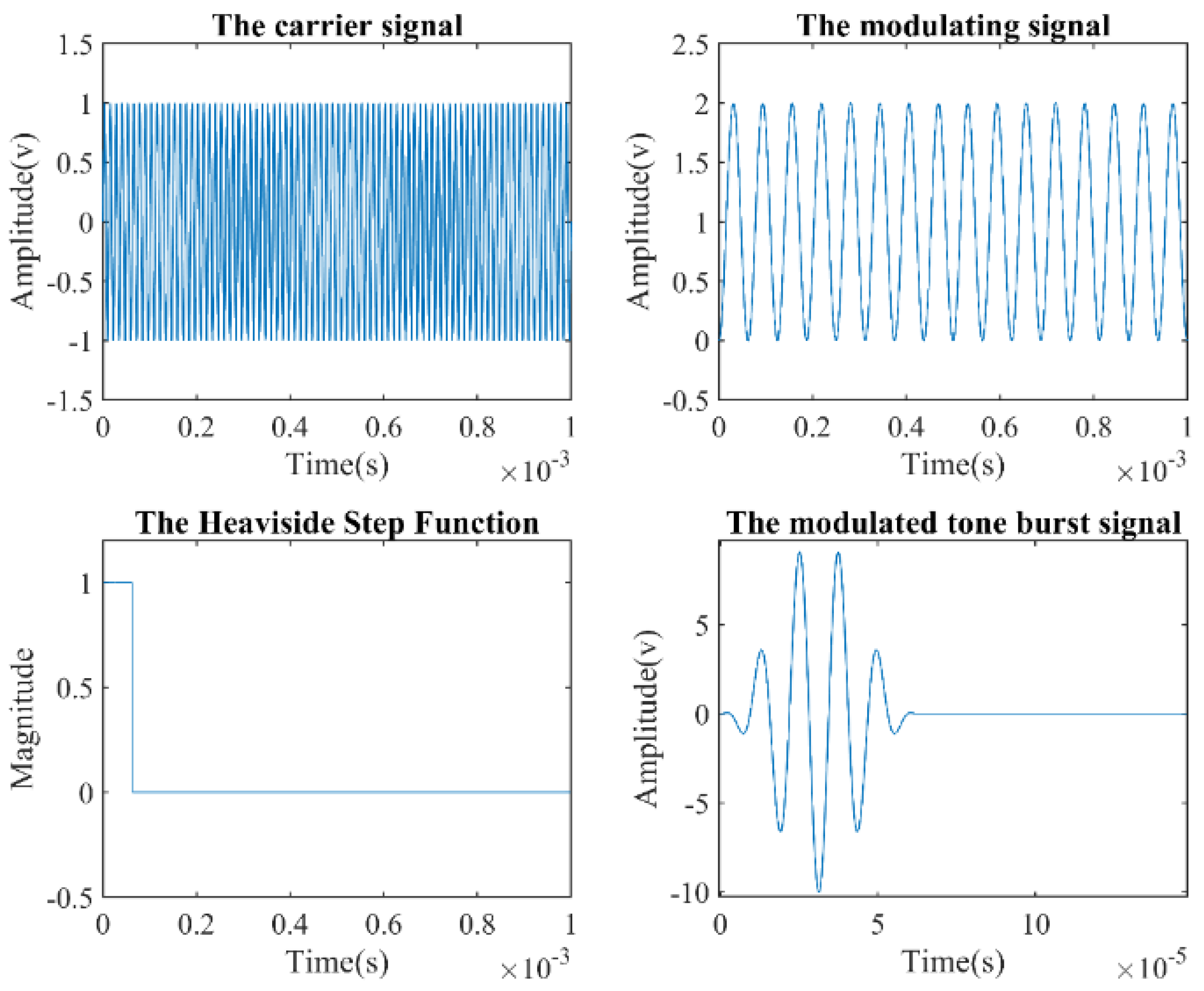
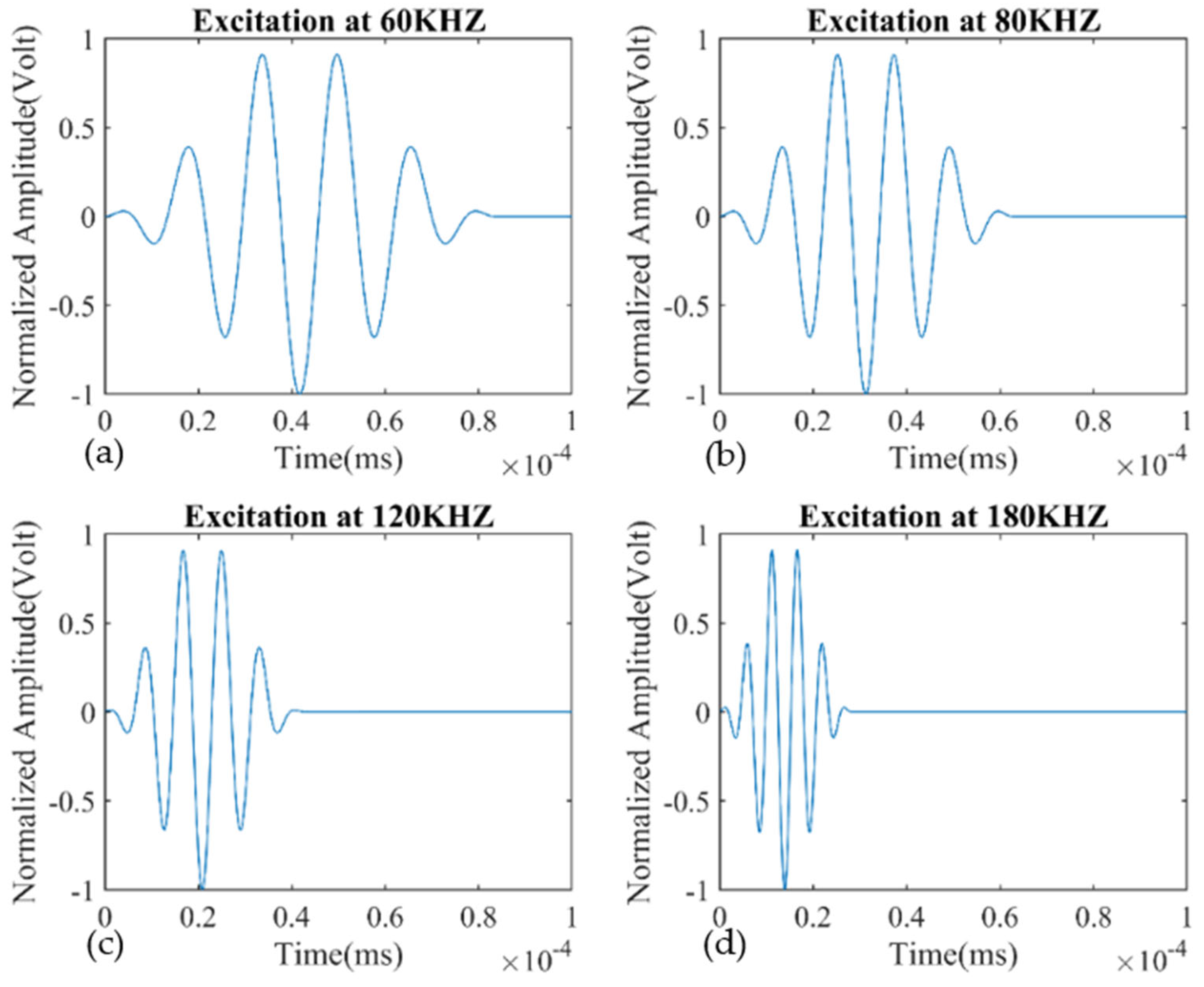
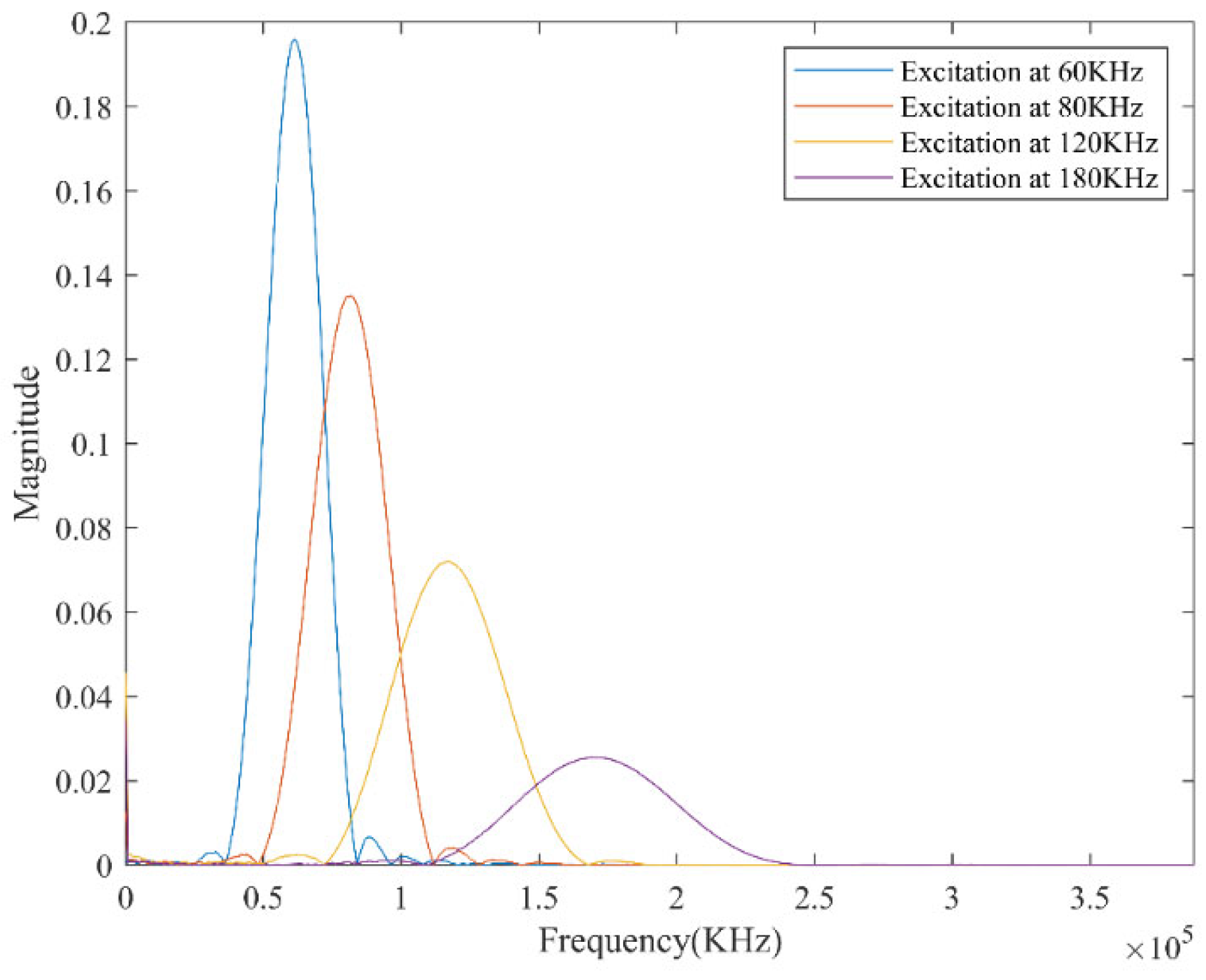
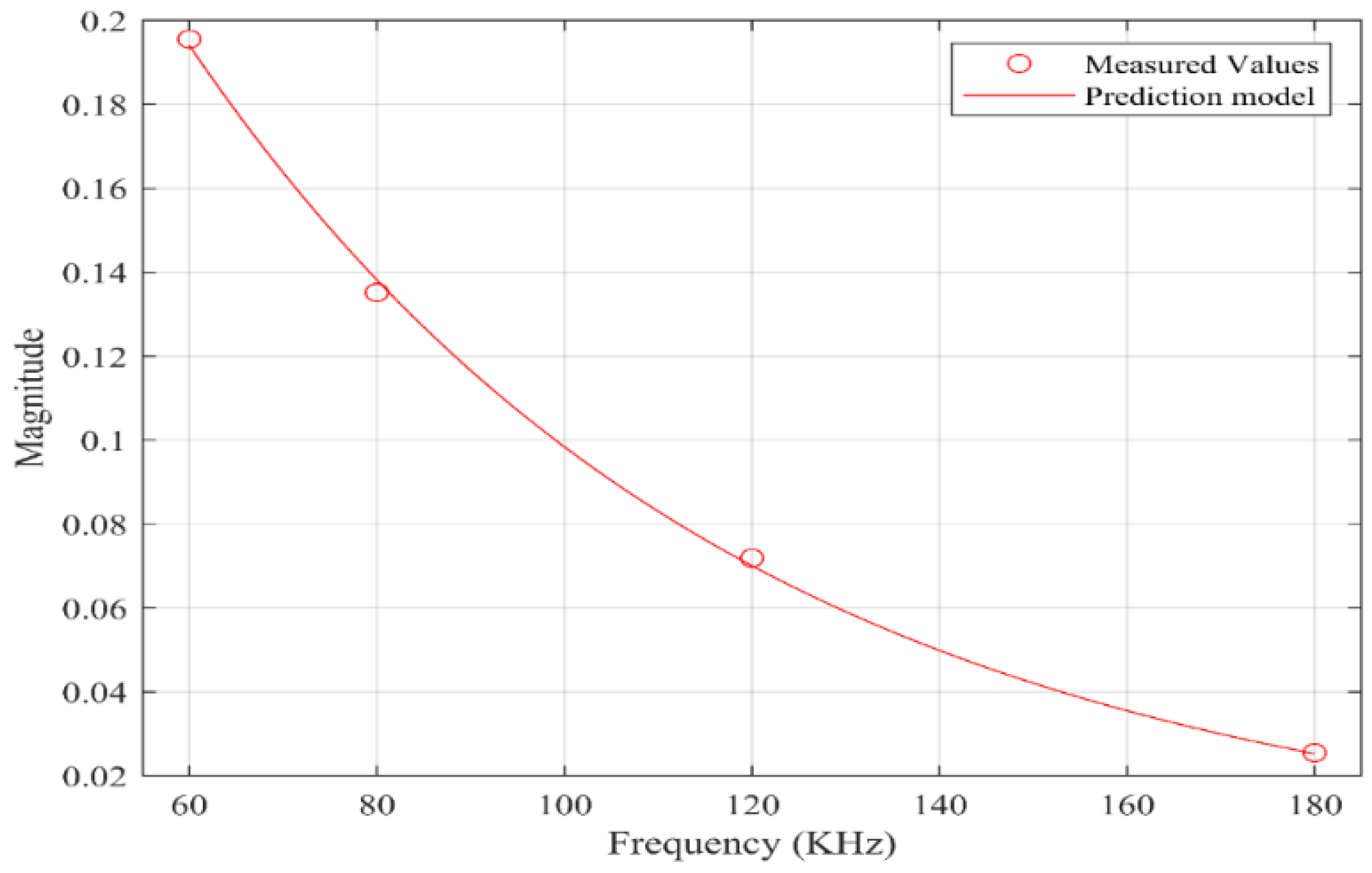
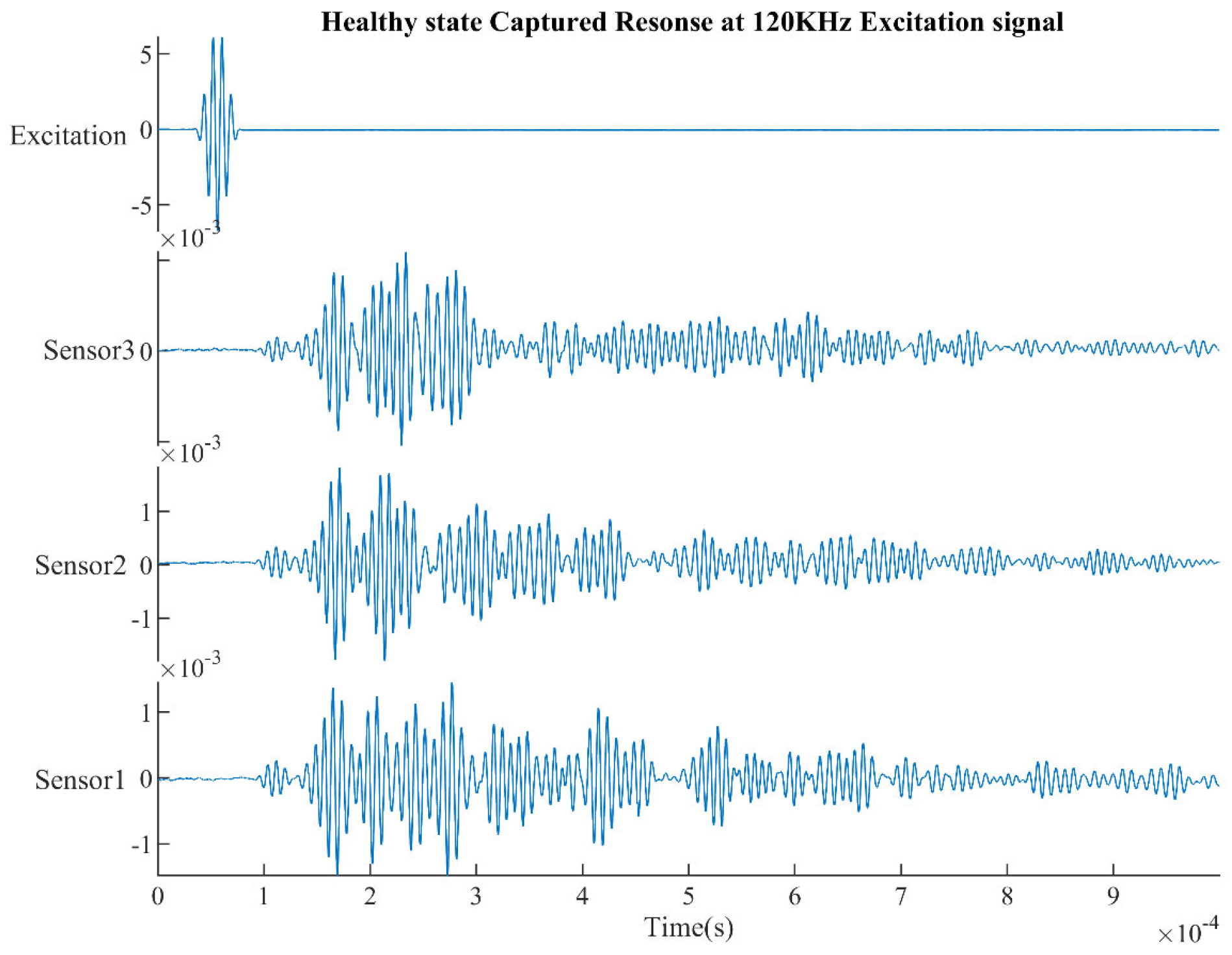
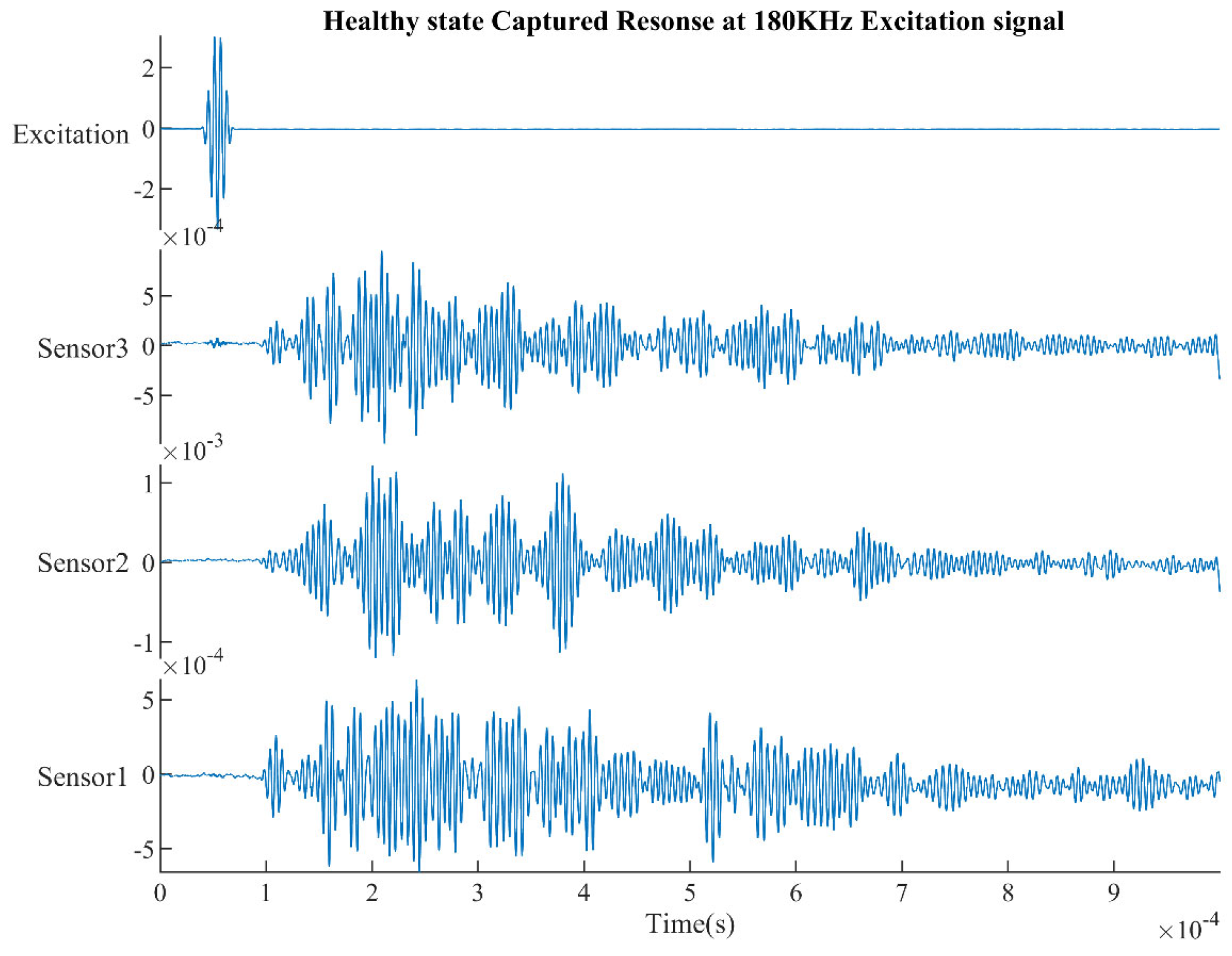
2.5. Excitation Signal Generation
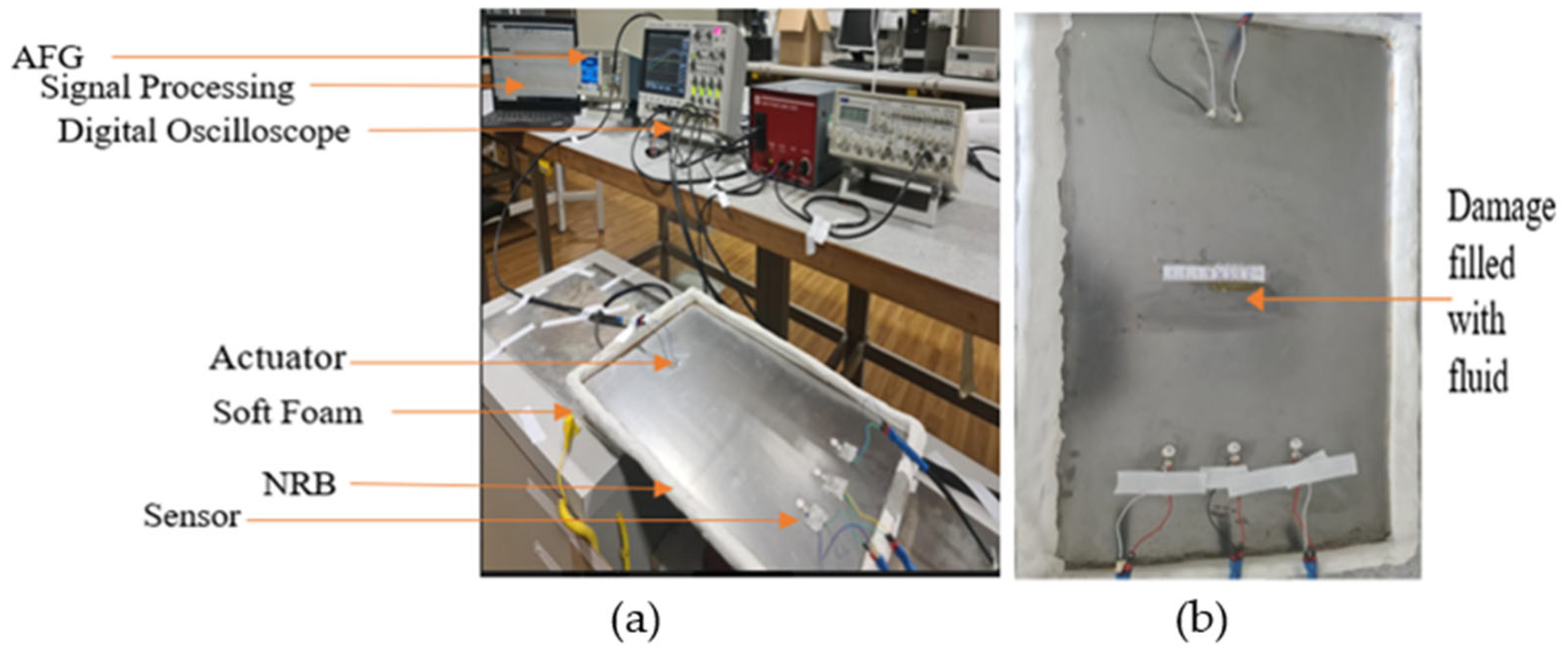
3. Materials and Methods
- Empty damage
- Debris-filled damage
- Water-filled damage
- Oil-filled damage
- Grease-filled damage
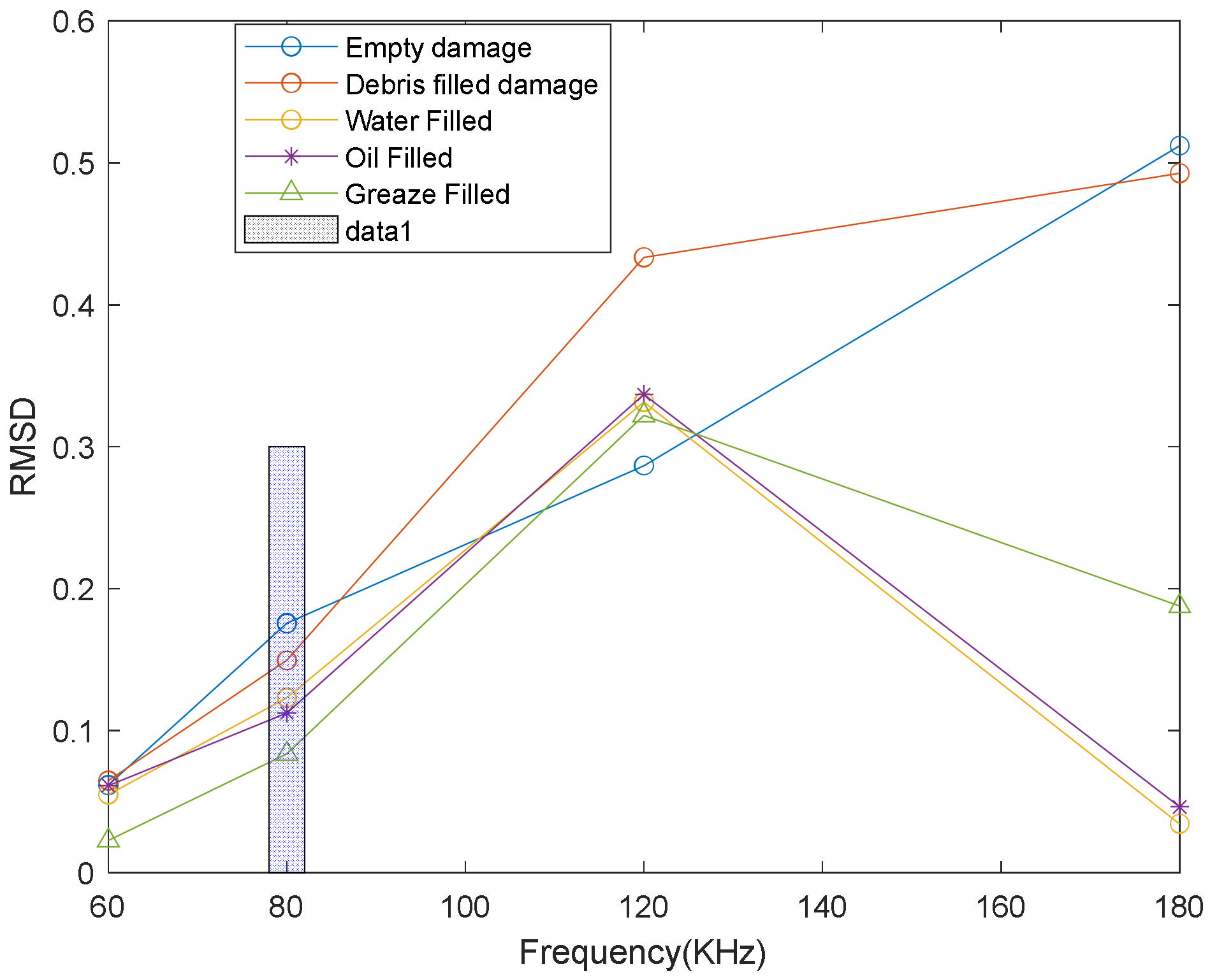
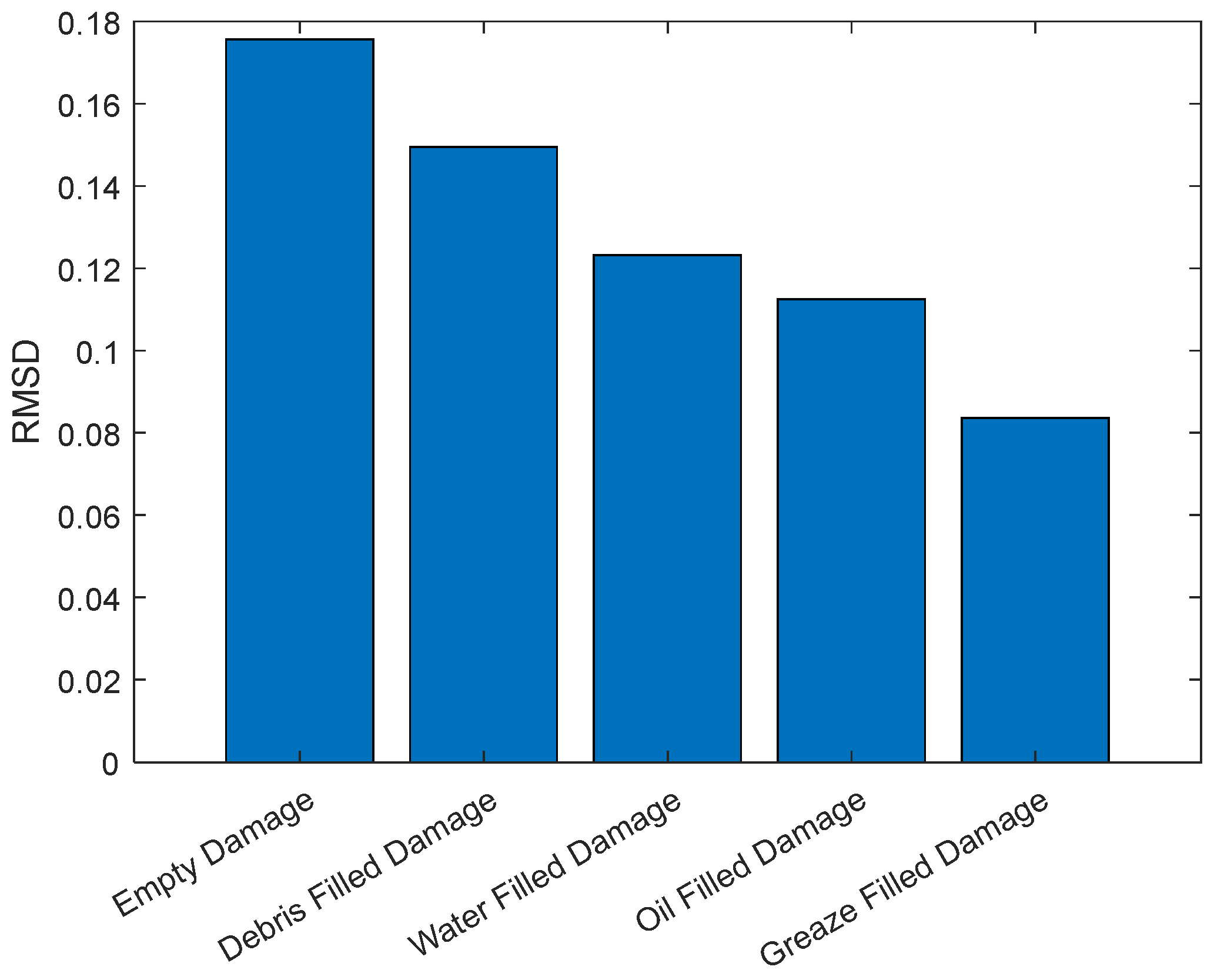
4. Results and Discussion Using the Set1 Range of Frequency
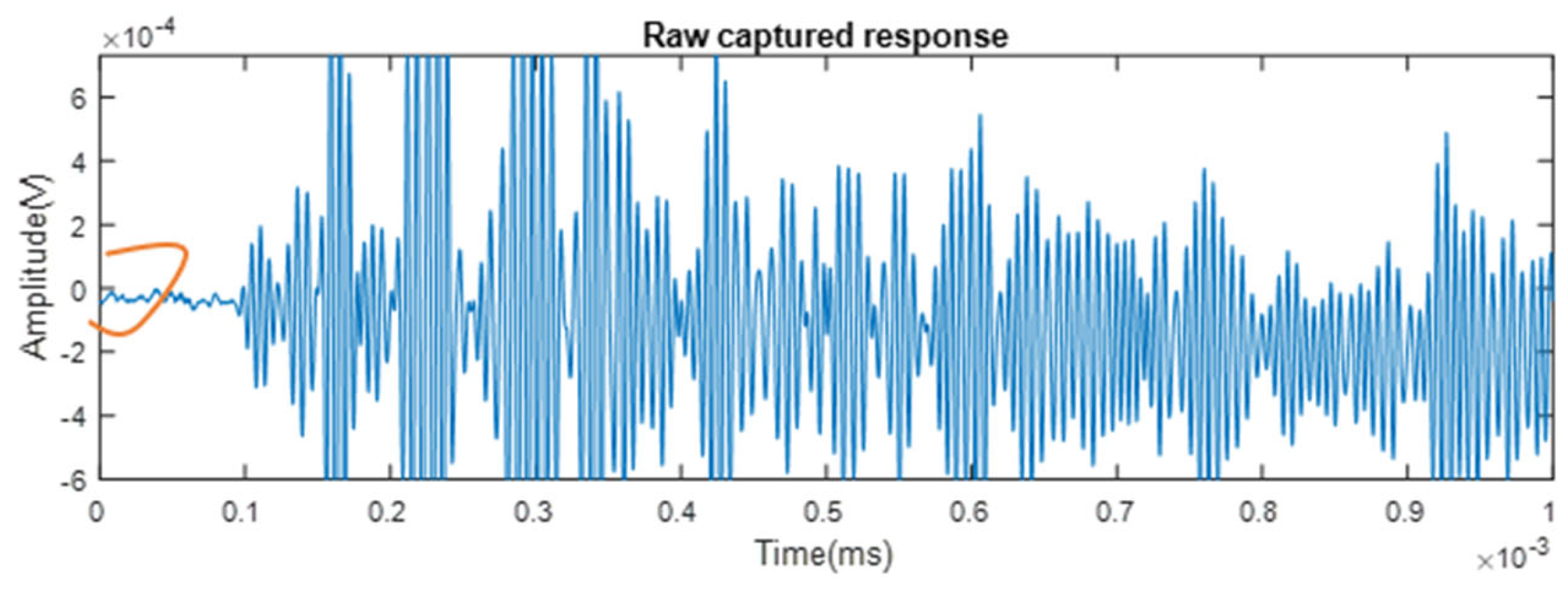
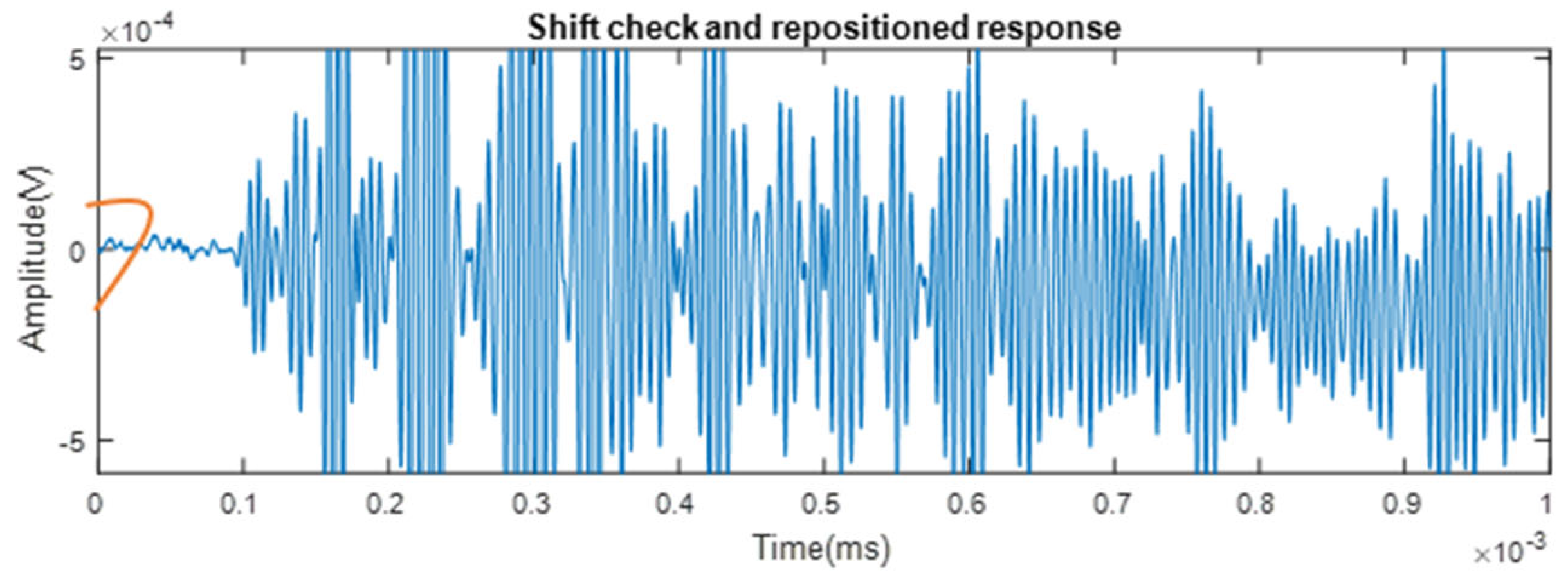
| Algorithm 1 Check and Shift |
| 1: function G = CheckandShift(x) 2: if x(i) < 0 % Condition 1: check if the first sample point is shifted below origin 0. 3: G = x + abs(x(i)); % If True, reposition the signal to the origin point. 4: elsif x(i) > 0% Condition 2: check if the first sample point is shifted above the origin 0. 5: G = x − abs(x(i)); % If True, reposition the signal to the origin point. 6: elsif x(i) == 0; % the default 7: G = x8: end |
- (a)
- Comparing empty damage and the pristine condition
- (b)
- Damage filled with dry debris and a plate of pristine condition
- (c)
- Damage filled with different fluids and the pristine condition of the plate
- (d)
- Comparing empty damage, damage filled with different fluids, damage filled with dry debris and a plate of pristine condition
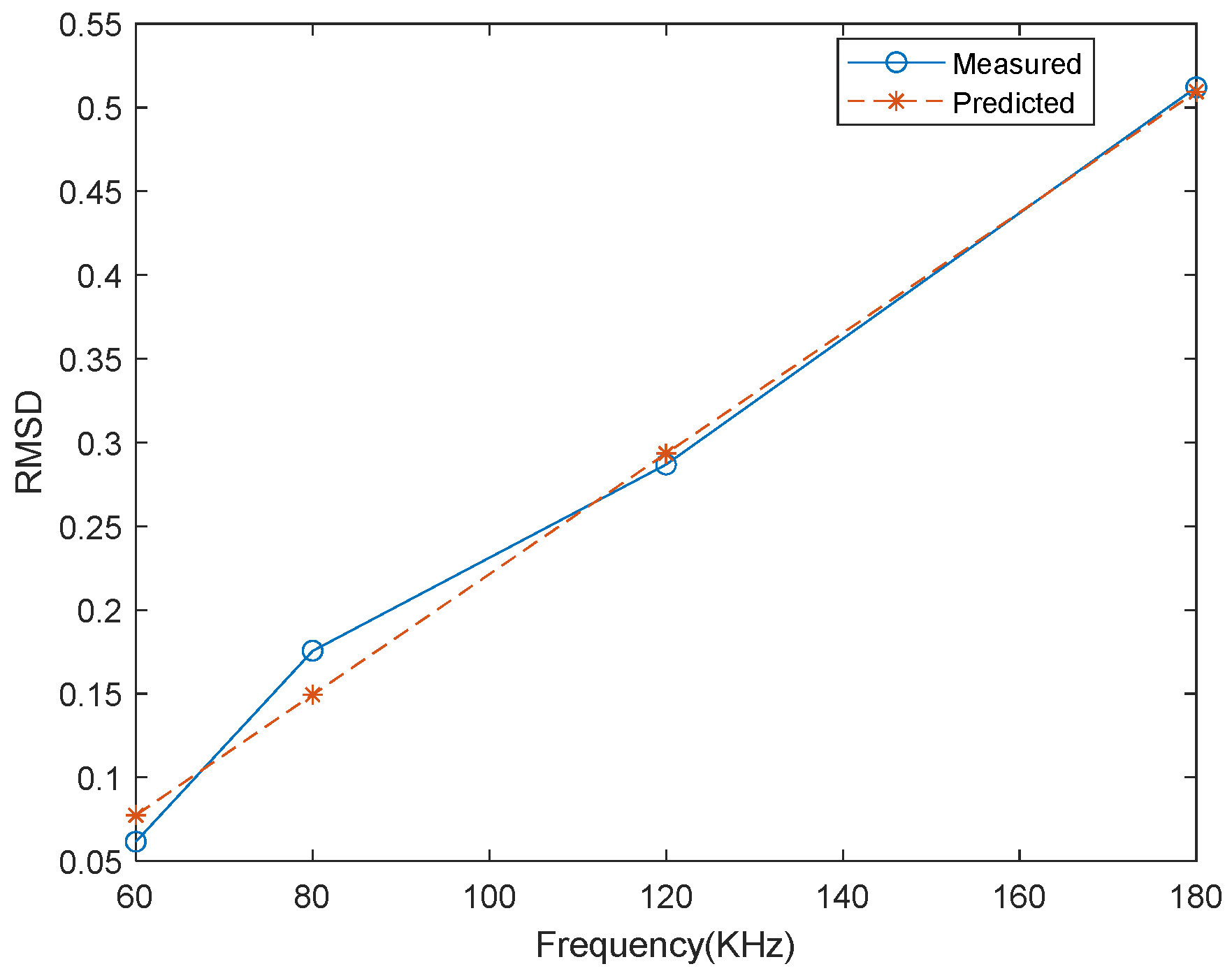
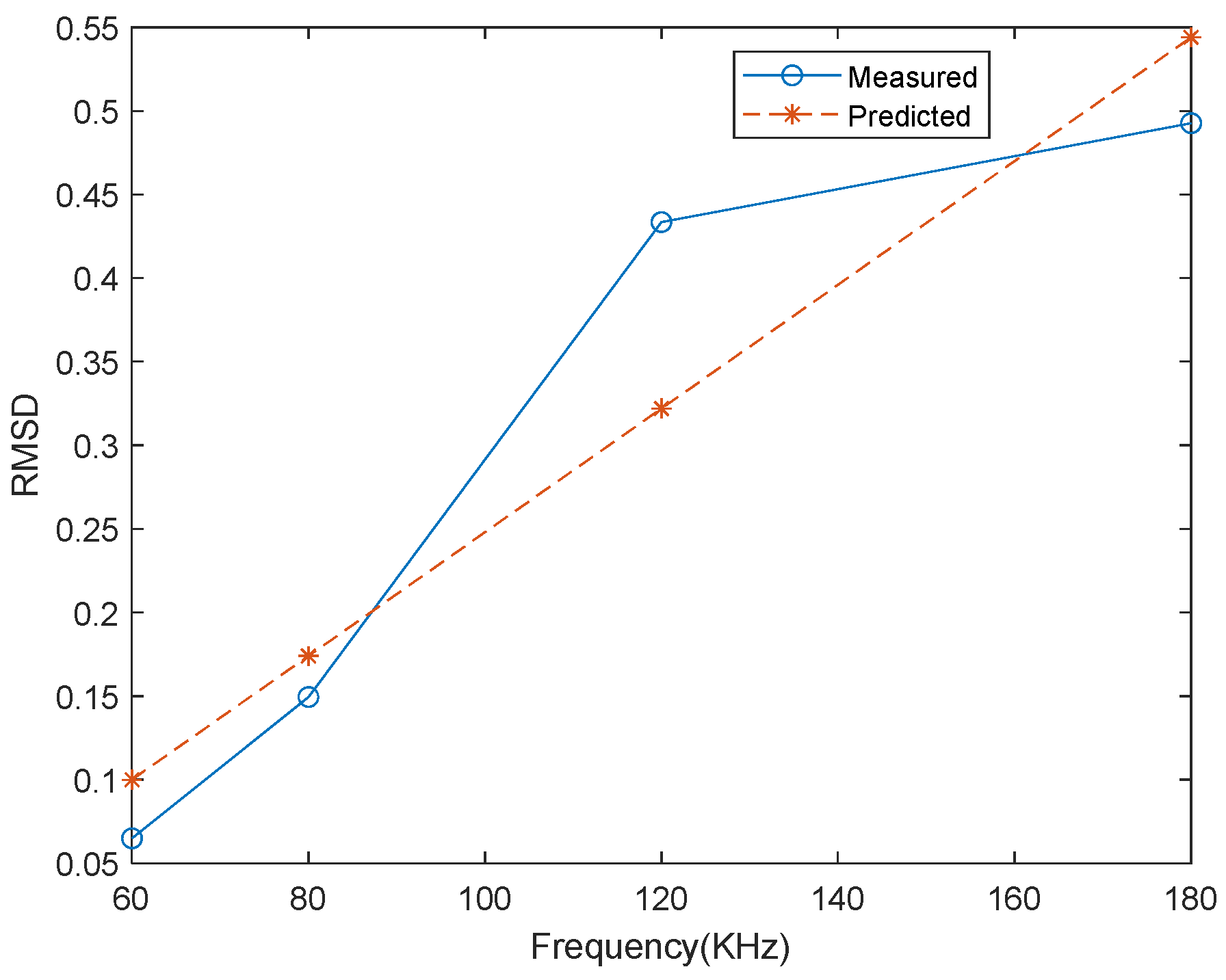
5. Results and Discussion Using a Set2 Range of Frequency
- (a)
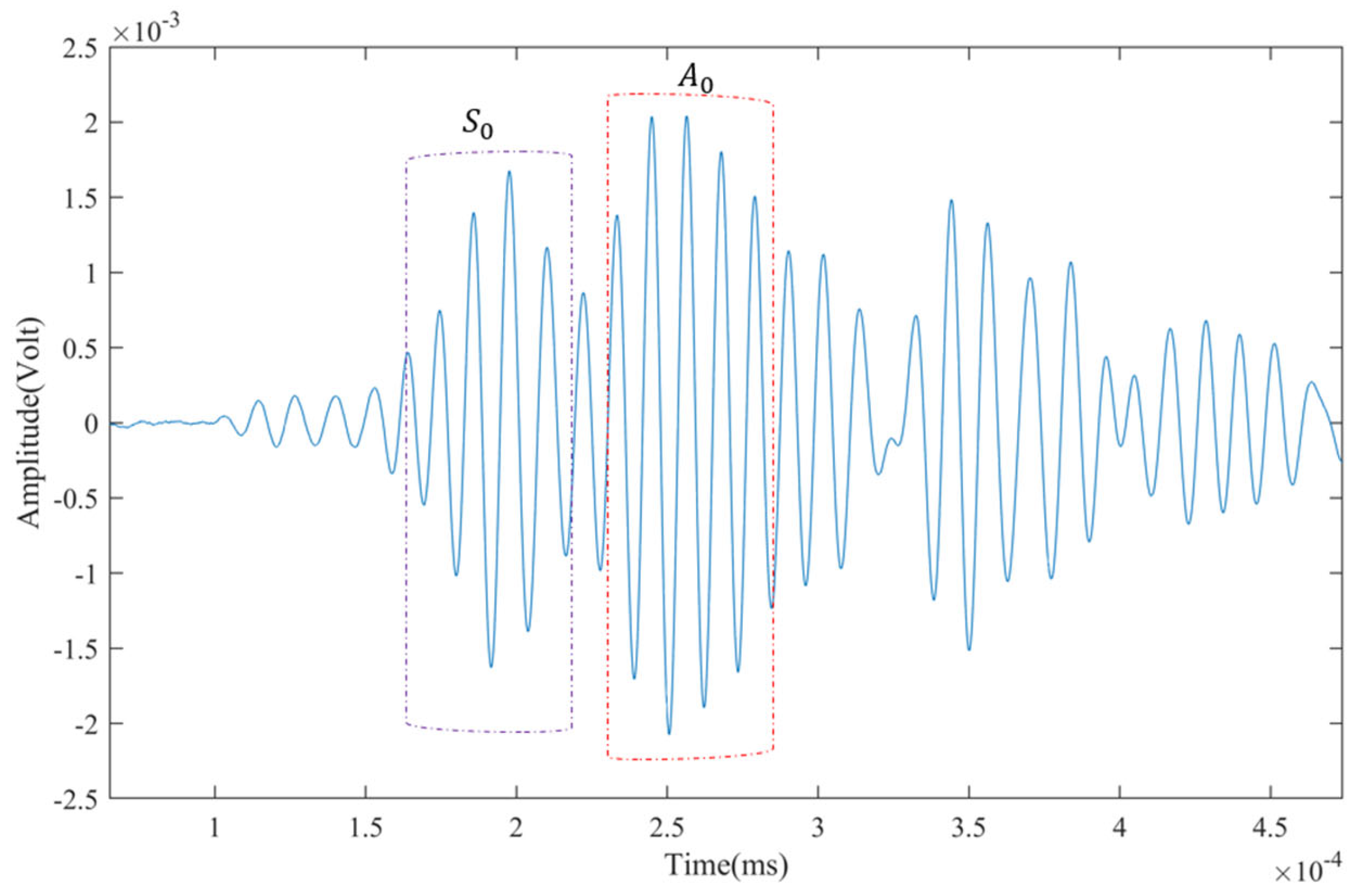
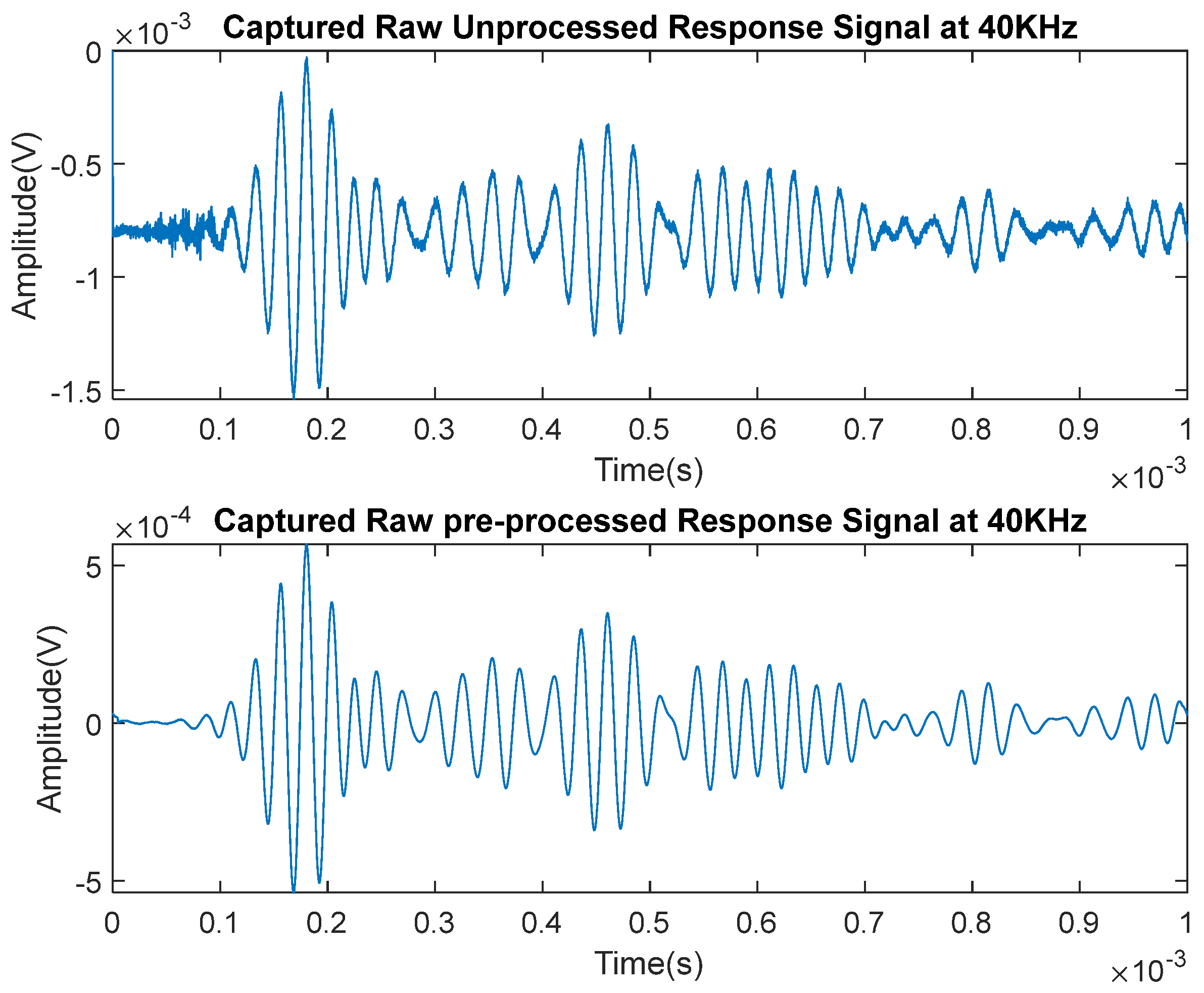
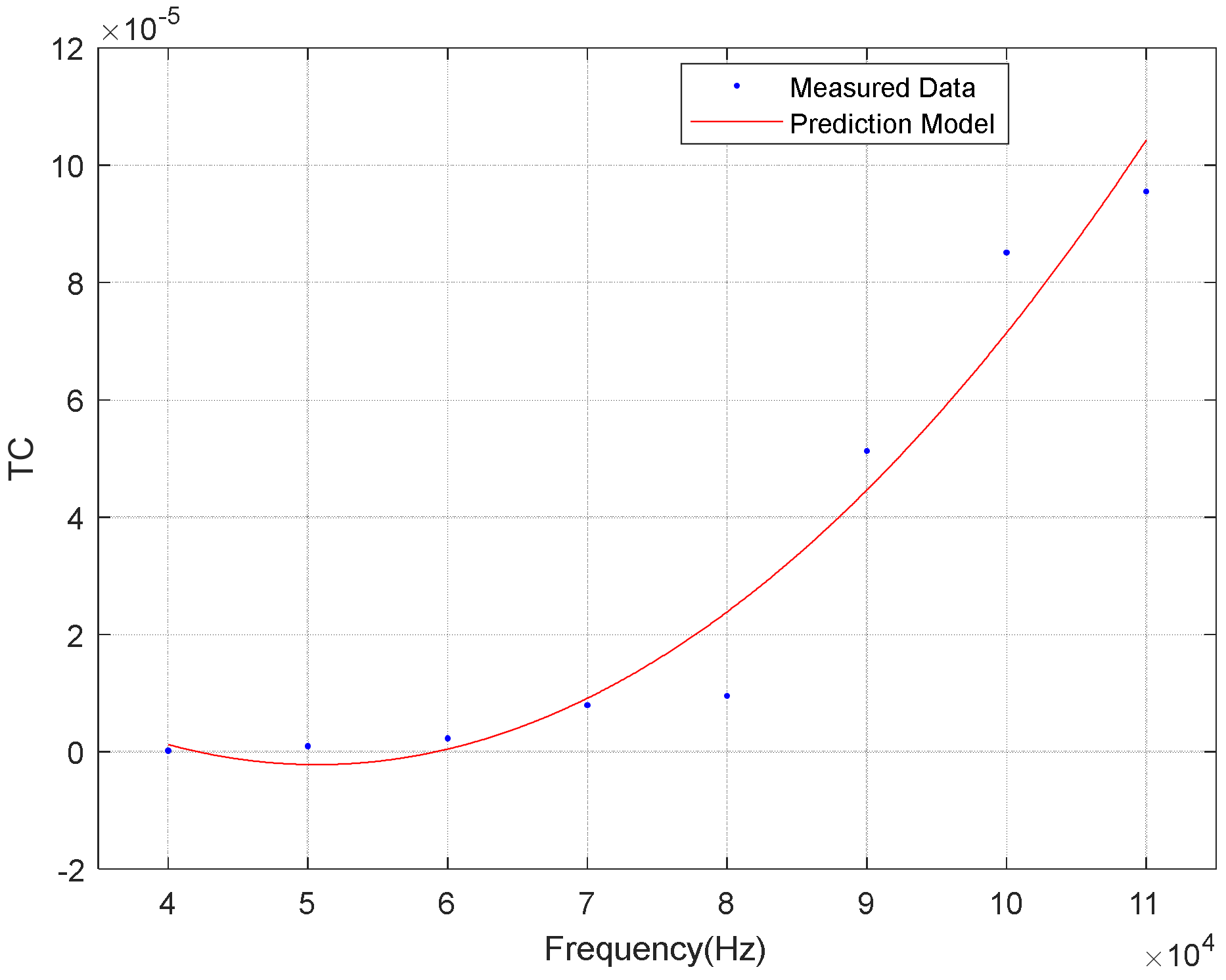
- Preprocessing of the Response Signals
- (b)
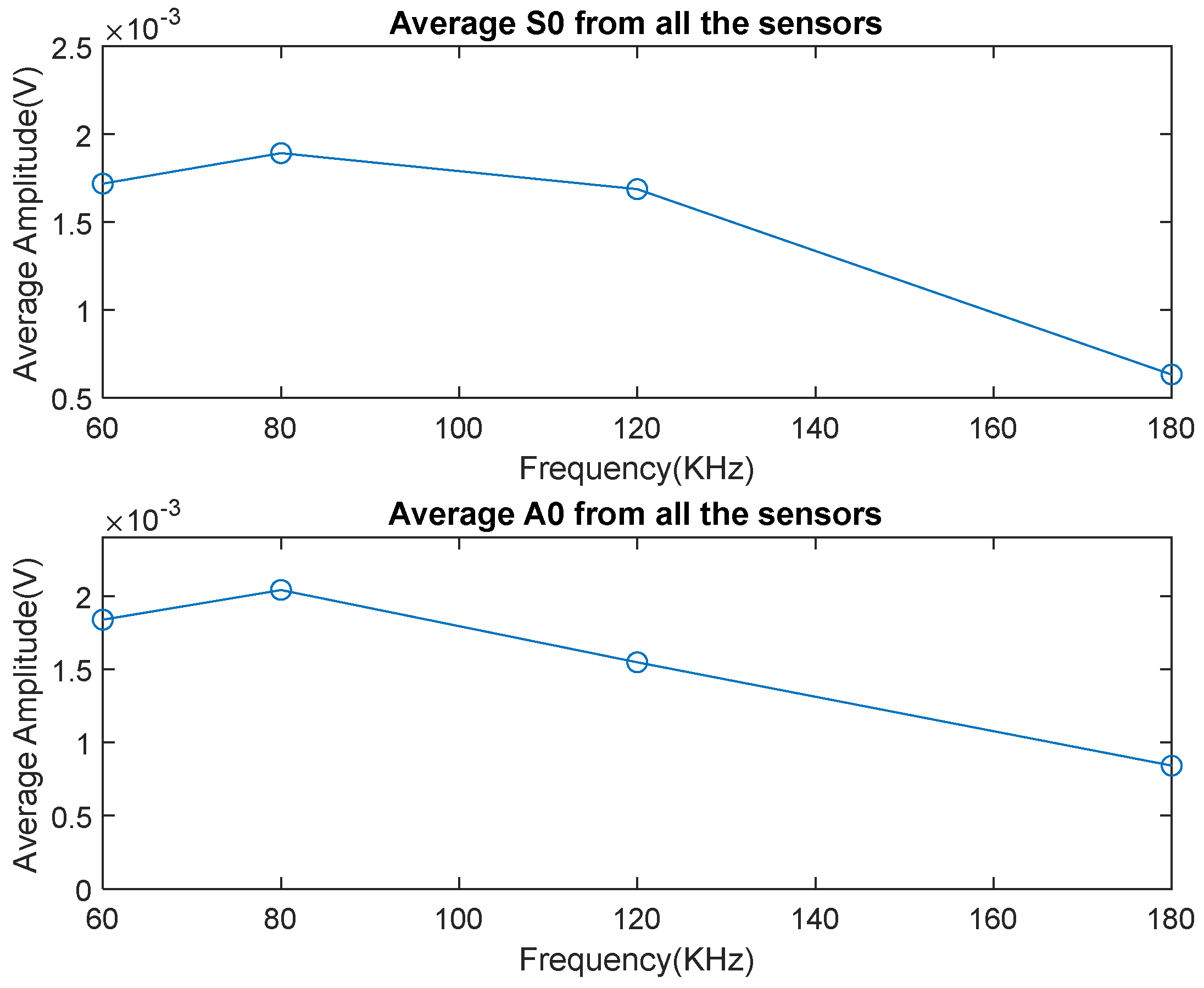
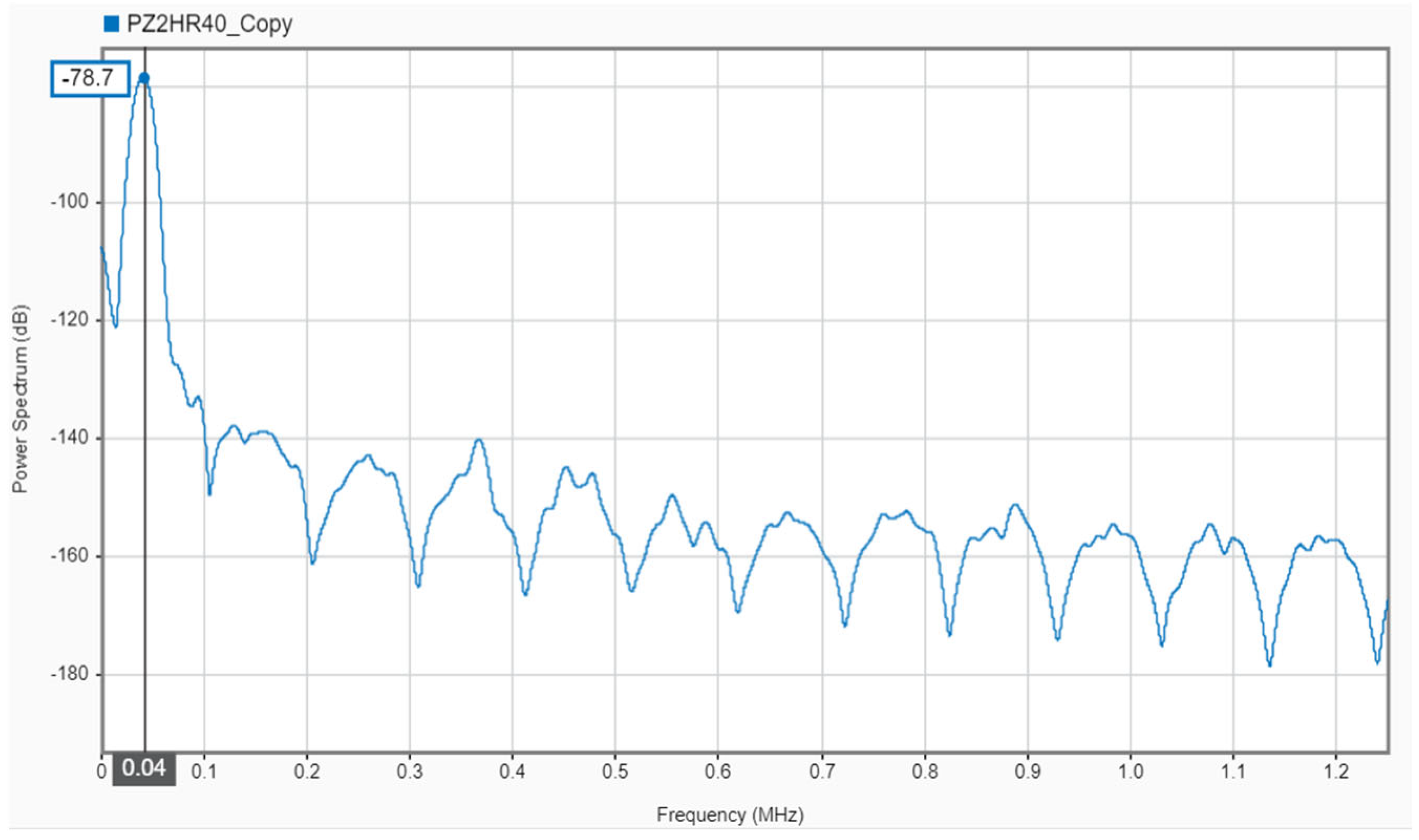
- The Transmission Coefficient (TC) Deduction
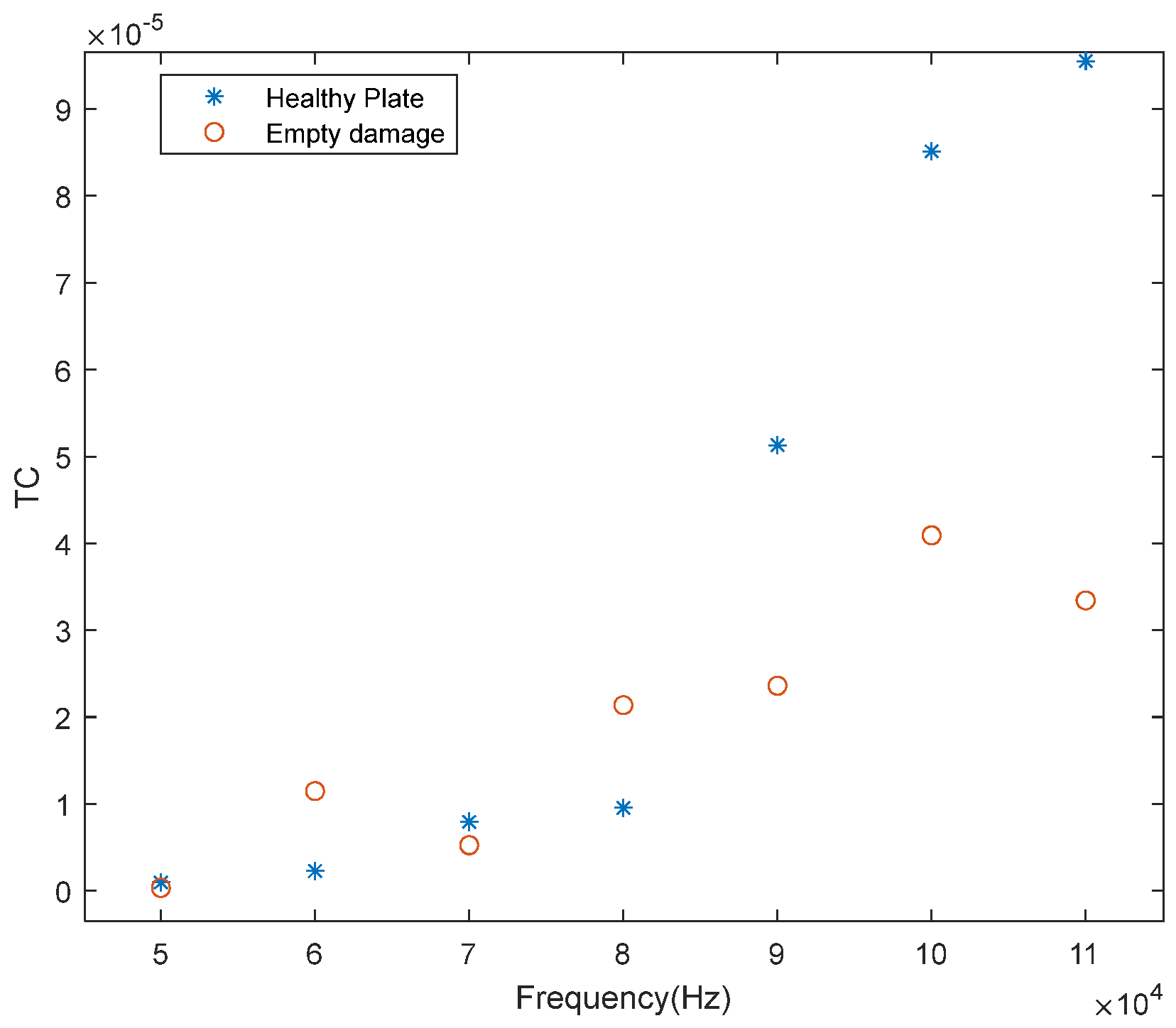
- (c)
- Comparing the TCs of the healthy and empty damage plates
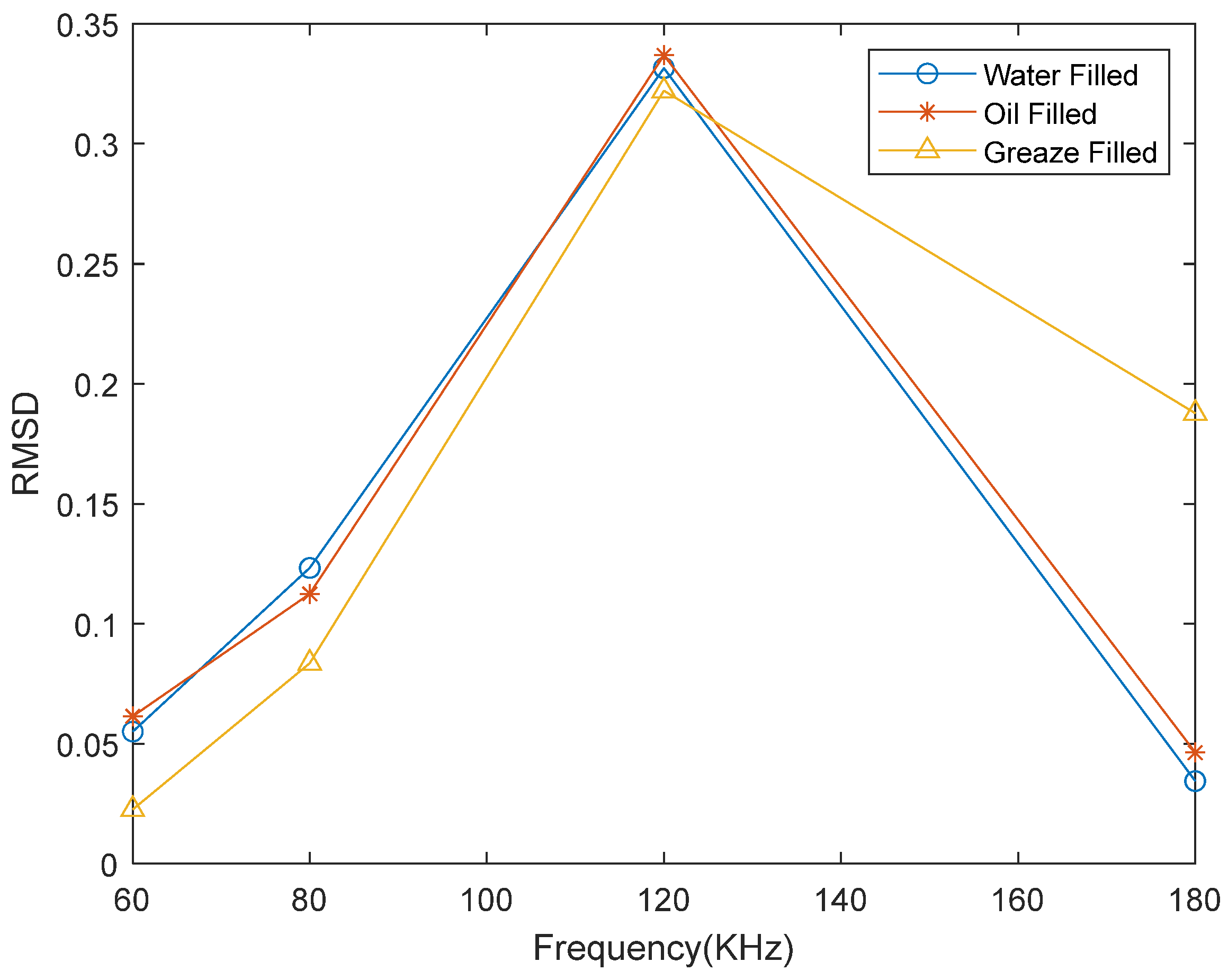
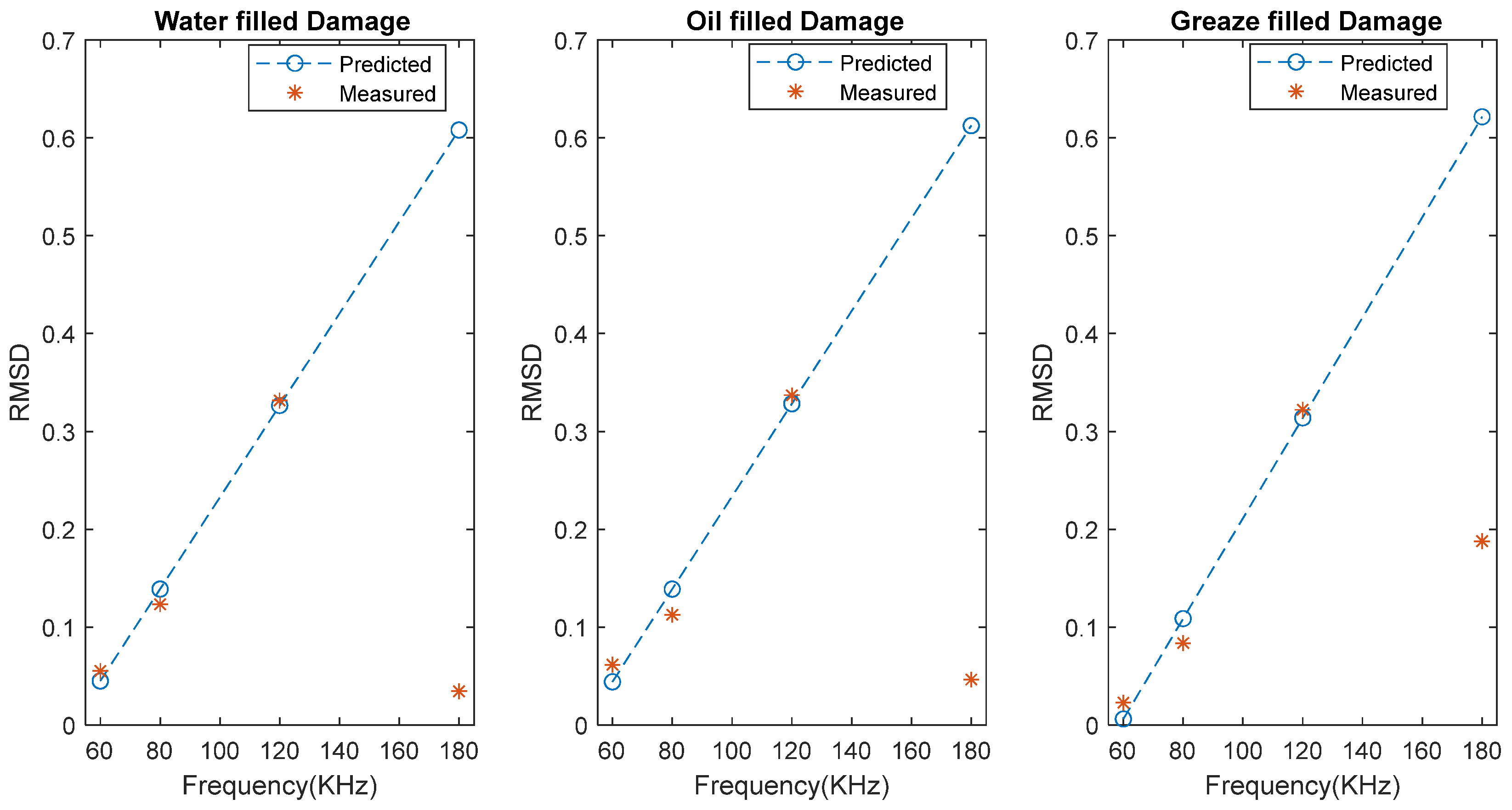
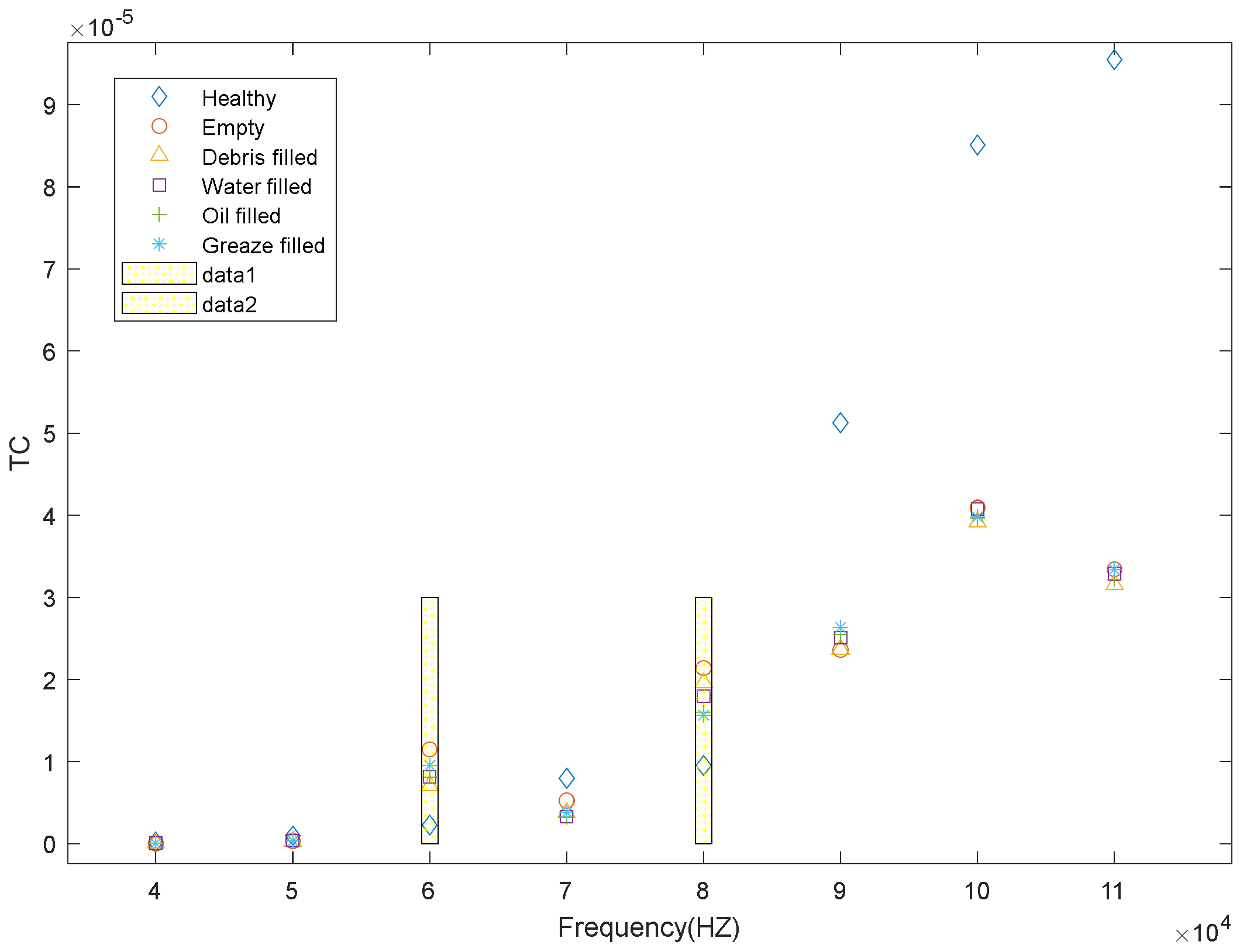
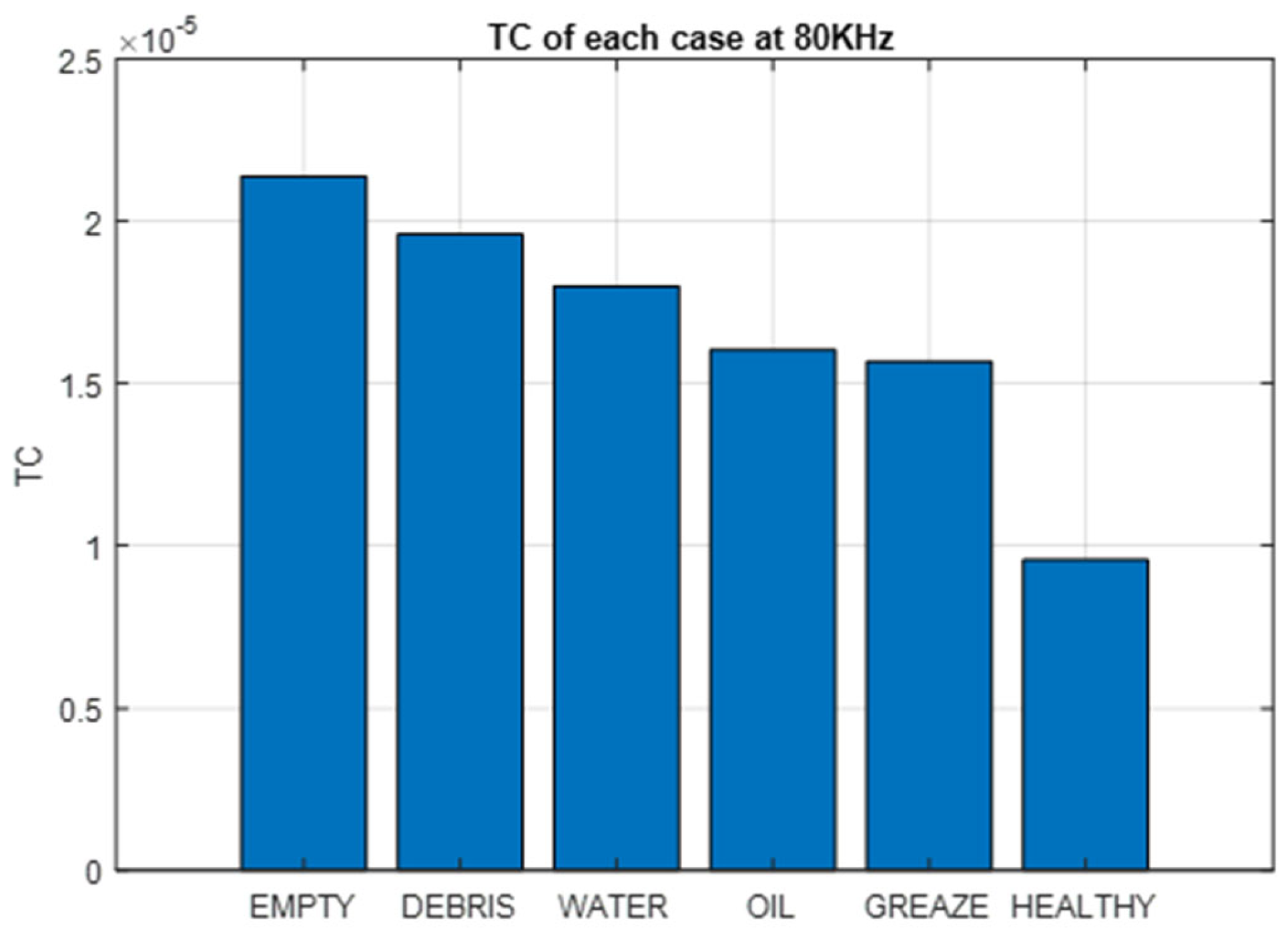
- (d) Comparing the TCs of the healthy plate, empty damage plate and different filled cases of the damage
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Musmar, M.A. Structural performance of steel plates. Front. Built Environ. 2022, 8, 991061. [Google Scholar] [CrossRef]
- Fromme, P. Corrosion Monitoring Using High-Frequency Guided Waves. Available online: http://www.ndt.net/?id=23235 (accessed on 8 April 2022).
- Olisa, S.C.; Starr, A.; Khan, M.A. Monitoring evolution of debris-filled damage using pre-modulated wave and guided wave ultrasonic testing (GWUT). Measurement 2022, 199, 111558. [Google Scholar] [CrossRef]
- Zai, B.A.; Khan, M.A.; Khan, K.A.; Mansoor, A.; Shah, A.; Shahzad, M. The role of dynamic response parameters in damage prediction. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4620–4636. [Google Scholar] [CrossRef]
- Zai, B.A.; Khan, M.A.; Khan, S.Z.; Asif, M.; Khan, K.A.; Saquib, A.N.; Mansoor, A.; Shahzad, M.; Mujtaba, A. Prediction of crack depth and fatigue life of an acrylonitrile butadiene styrene cantilever beam using dynamic response. J. Test. Eval. 2020, 48, 1520–1536. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Gresil, M.; Lin, B.; Cuc, A.; Shen, Y.; Roman, C. Predictive modeling of piezoelectric wafer active sensors interaction with high-frequency structural waves and vibration. Acta Mech. 2012, 223, 1681–1691. [Google Scholar] [CrossRef]
- Samaitis, V.; Jasiūnienė, E.; Packo, P.; Smagulova, D. Ultrasonic Methods; Springer Aerospace Technology: Cham, Switzerland, 2021; pp. 87–131. [Google Scholar]
- Abohamer, M.K.; Awrejcewicz, J.; Amer, T.S. Modeling and analysis of a piezoelectric transducer embedded in a nonlinear damped dynamical system. Nonlinear Dyn. 2023, 111, 8217–8234. [Google Scholar] [CrossRef]
- Lan, Y.; Zhang, Y.; Lin, W. Diagnosis algorithms for indirect bridge health monitoring via an optimized AdaBoost-linear SVM. Eng. Struct. 2023, 275, 115239. [Google Scholar] [CrossRef]
- Lan, Y.; Li, Z.; Koski, K.; Fülöp, L.; Tirkkonen, T.; Lin, W. Bridge frequency identification in city bus monitoring: A coherence-PPI algorithm. Eng. Struct. 2023, 296, 116913. [Google Scholar] [CrossRef]
- Zai, B.A.; Khan, M.A.; Khan, K.A.; Mansoor, A. A novel approach for damage quantification using the dynamic response of a metallic beam under thermo-mechanical loads. J. Sound Vib. 2020, 469, 115134. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press: Cambridge, MA, USA, 2006; pp. 94–100. [Google Scholar]
- Zhang, S.; Hou, L.; Wei, H.; Wei, Y.; Liu, B. Failure analysis of an oil pipe wall perforated by pitting corrosion. Mater. Corros. 2018, 69, 1123–1130. [Google Scholar] [CrossRef]
- Rizvi, S.H.M.; Abbas, M. Lamb wave damage severity estimation using ensemble-based machine learning method with separate model network. Smart Mater. Struct. 2021, 30, 115016. [Google Scholar] [CrossRef]
- Zima, B.; Kędra, R. Detection and size estimation of crack in plate based on guided wave propagation. Mech. Syst. Signal Process. 2020, 142, 106788. [Google Scholar] [CrossRef]
- Barreto, L.S.; Machado, M.R.; Santos, J.C.; De Moura, B.B.; Khalij, L. Damage indices evaluation for one-dimensional guided wave-based structural health monitoring. Lat. Am. J. Solids Struct. 2021, 18, e354. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Haider, M.F.; Bhuiyan, M.Y.; Poddar, B. Guided wave crack detection and size estimation in stiffened structures. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, Denver, CO, USA, 4–8 March 2018; p. 91. [Google Scholar]
- Rose, J.L. A baseline and vision of ultrasonic guided wave inspection potential. J. Press. Vessel Technol. Trans. ASME 2002, 124, 273–282. [Google Scholar] [CrossRef]
- Achenbach, J.D. Wave Propagation in Elastic Solids; Elsevier: Amsterdam, The Netherlands, 1975. [Google Scholar]
- Olisa, S.C.; Khan, M.A.; Starr, A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors 2021, 21, 811. [Google Scholar] [CrossRef]
- Jansen, D.P.; Hutchins, D.A. Immersion tomography using Rayleigh and Lamb waves. Ultrasonics 1992, 30, 245–254. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Piezoelectric Wafer Active Sensors. In Structural Health Monitoring of Aerospace Composites; Elsevier: Amsterdam, The Netherlands, 2016; pp. 177–248. [Google Scholar]
- Fromme, P.; Rouge, C. Directivity of guided ultrasonic wave scattering at notches and cracks. J. Phys. Conf. Ser. 2011, 269, 012018. [Google Scholar] [CrossRef]
- Croxford, A.J.; Wilcox, P.D.; Drinkwater, B.W.; Konstantinidis, G. Strategies for guided-wave structural health monitoring. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 2961–2981. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Wave Propagation SHM with PWAS Transducers. In Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press: Cambridge, MA, USA, 2014; ISBN 9780124186910. [Google Scholar]
- Mori, N.; Biwa, S. Transmission of Lamb waves and resonance at an adhesive butt joint of plates. Ultrasonics 2016, 72, 80–88. [Google Scholar] [CrossRef]
- Nondestructive Evaluation Physics: Waves. Available online: https://www.nde-ed.org/Physics/Waves/defectdetect.xhtml (accessed on 9 December 2022).
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 1999; Volume 107, ISBN 0521640431. [Google Scholar]
- RS PRO 1 L Bottle Acetone for Electrical Equipment|RS. Available online: https://uk.rs-online.com/web/p/electronics-cleaners/9181082 (accessed on 8 June 2023).
- Mouser Electronics EPCOS/TDK B59070Z0285D121. Available online: https://www.mouser.co.uk/ProductDetail/EPCOS-TDK/B59070Z0285D121/?qs=%2Fha2pyFadujOK1FwqH2KMz0Pz6N4NsTp98IXjK5%252ByUdau%2F46TW6%2F6PXDraubdvK0 (accessed on 28 September 2021).
- Su, Z.; Ye, L. Identification of Damage Using Lamb Waves; Pfeiffer, F., Wriggers, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 9781848827837. [Google Scholar]
- Loctite Loctite HYSOL 3421 Transparent Yellow 50 ml Epoxy Adhesive Dual Cartridge for Various Materials|RS|248211. Available online: https://uk.rs-online.com/web/p/resins/4589478 (accessed on 18 January 2023).
- Olisa, S.C.; Khan, M.A.; Starr, A. Confounding Factors Effect on Guided Wave Ultrasonic Testing(GWUT). In Proceedings of the 17th International Conference on Condition Monitoring and Asset Management, CM 2021, London, UK, 14–18 June 2021; Available online: https://www.scopus.com/inward/record.uri?eid=2-s2.0-85114203175&partnerID=40&md5=44a288ed2a5c6bbc848511aa4e198e (accessed on 30 March 2022).
- Qing, X.P.; Chan, H.L.; Beard, S.J.; Ooi, T.K.; Marotta, S.A. Effect of adhesive on the performance of piezoelectric elements used to monitor structural health. Int. J. Adhes. Adhes. 2006, 26, 622–628. [Google Scholar] [CrossRef]
- Morvan, B.; Wilkie-Chancellier, N.; Duflo, H.; Tinel, A.; Duclos, J. Lamb wave reflection at the free edge of a plate. J. Acoust. Soc. Am. 2003, 113, 1417–1425. [Google Scholar] [CrossRef]
- Amazon UK DAS Modelling Air Dry Clay White. Available online: https://www.amazon.co.uk/DAS-Modelling-Air-Clay-White/dp/B003P8RRU0/ref=sr_1_13?crid=3MN56983W60HG&keywords=paper+clay&qid=1643611314&sprefix=paper+clay%2Caps%2C63&sr=8-13 (accessed on 31 January 2022).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young Modulus, E (N/m2) | Poisson’s Ratio, | Density, (kg/m3) | Length, L (mm) | Width, W (mm) | Thickness, Th (mm) |
|---|---|---|---|---|---|---|
| Carbon steel | 2 × 1011 | 0.289 | 7800 | 500 | 300 | 3 |
| Parameter | Unit | Min. Value | Typical Value | Max. Value |
|---|---|---|---|---|
| Diameter of ceramics | mm | 6.80 | 7.00 | 7.20 |
| Thickness of ceramics | μm | 175 | 195 | 215 |
| Curie temperature | Tc | − | 340 | − |
| Piezoelectric constant | pC/N | − | 420 | − |
| Elastic compliance | − | − | ||
| Serial resonance frequency (fs) | kHz | −5% | 285 | +5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olisa, S.C.; Khan, M.A.; Starr, A. Elastic Wave Mechanics in Damaged Metallic Plates. Symmetry 2023, 15, 1989. https://doi.org/10.3390/sym15111989
Olisa SC, Khan MA, Starr A. Elastic Wave Mechanics in Damaged Metallic Plates. Symmetry. 2023; 15(11):1989. https://doi.org/10.3390/sym15111989
Chicago/Turabian StyleOlisa, Samuel Chukwuemeka, Muhammad A. Khan, and Andrew Starr. 2023. "Elastic Wave Mechanics in Damaged Metallic Plates" Symmetry 15, no. 11: 1989. https://doi.org/10.3390/sym15111989