
A Stochastic Discrete Empirical Interpolation Approach for Parameterized Systems


Abstract
:1. Introduction
2. Problem Formulation
2.1. The Linear Approximation Space
2.2. Empirical Interpolation Method (EIM)
3. Discrete Empirical Interpolation Method and Its Stochastic Version
3.1. Discrete Empirical Interpolation Method (DEIM)
| Algorithm 1 Discrete empirical interpolation method (DEIM) [6] |
| Input: A candidate sample set and a target function . |
| 1: Initialize and orthonormalize as . |
| 2: Initialize . |
| 3: Initialize and . |
| 4: while do |
| 5: Compute the error for , . |
| 6: Let . |
| 7: Compute through orthonormalizing with by (18). |
| 8: Solve the equation for . |
| 9: Compute the residual . |
| 10: Select the interpolation index as . |
| 11: Update and . |
| 12: end while |
| Output: The matrix of basis functions and the matrix of interpolation points . |
3.2. Stochastic Discrete Empirical Interpolation Method (SDEIM)
| Algorithm 2 Stochastic discrete empirical interpolation method (SDEIM) |
| Input: A constant number N and a target function . |
| 1: Sample randomly. |
| 2: Evaluate the target function and initialize . |
| 3: Initialize . |
| 4: Initialize and . |
| 5: Initialize the counting index . |
| 6: while (if , it means that in verifying stage) do |
| 7: Sample randomly. |
| 8: if error then |
| 9: Set counting index . |
| 10: Compute through orthonormalizing with the by (18). |
| 11: Solve for . |
| 12: Compute the residual . |
| 13: Select the interpolation index as . |
| 14: Update and . |
| 15: else |
| 16: Update . |
| 17: end if |
| 18: end while |
| Output: The matrix of basis functions and the matrix of interpolation points . |
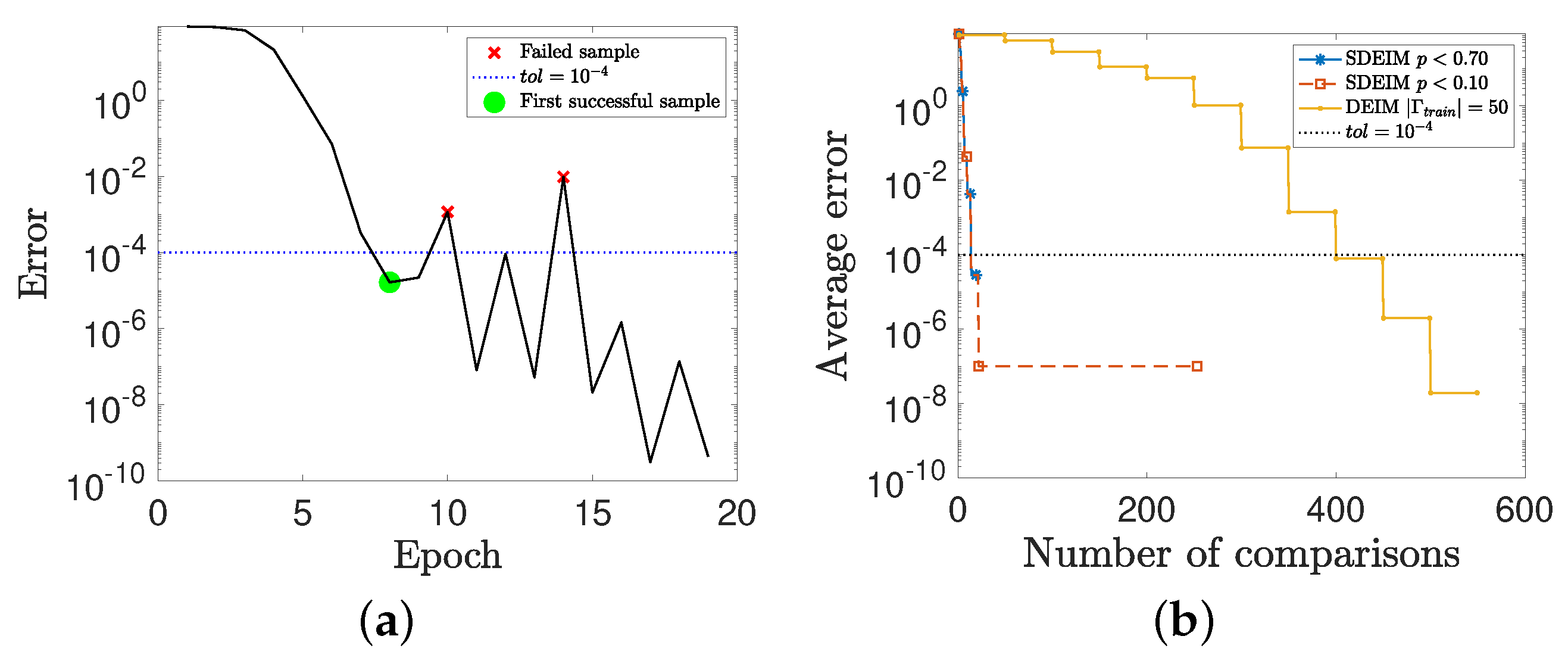
3.3. Performance and Complexity of SDEIM
4. Numerical Experiments
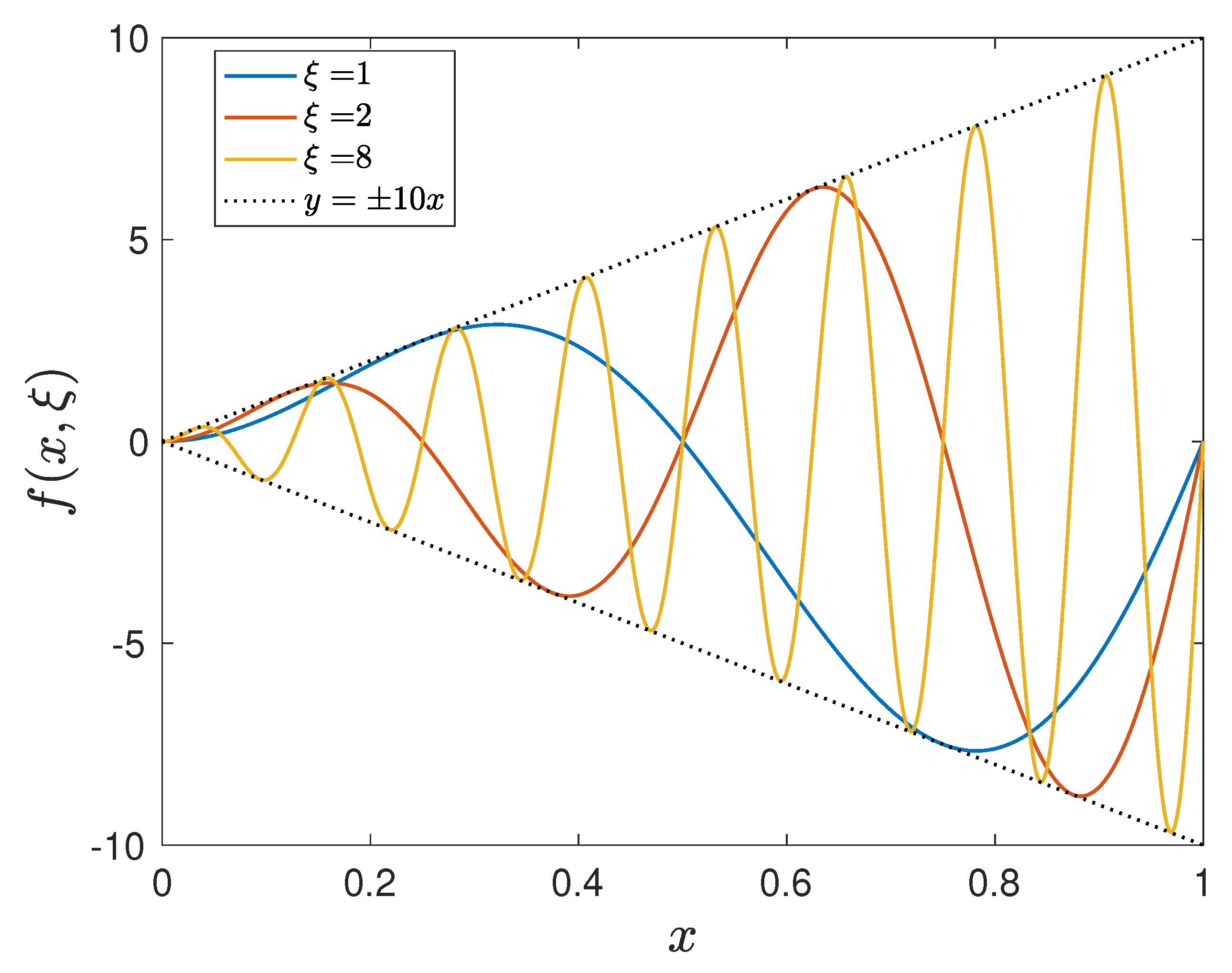
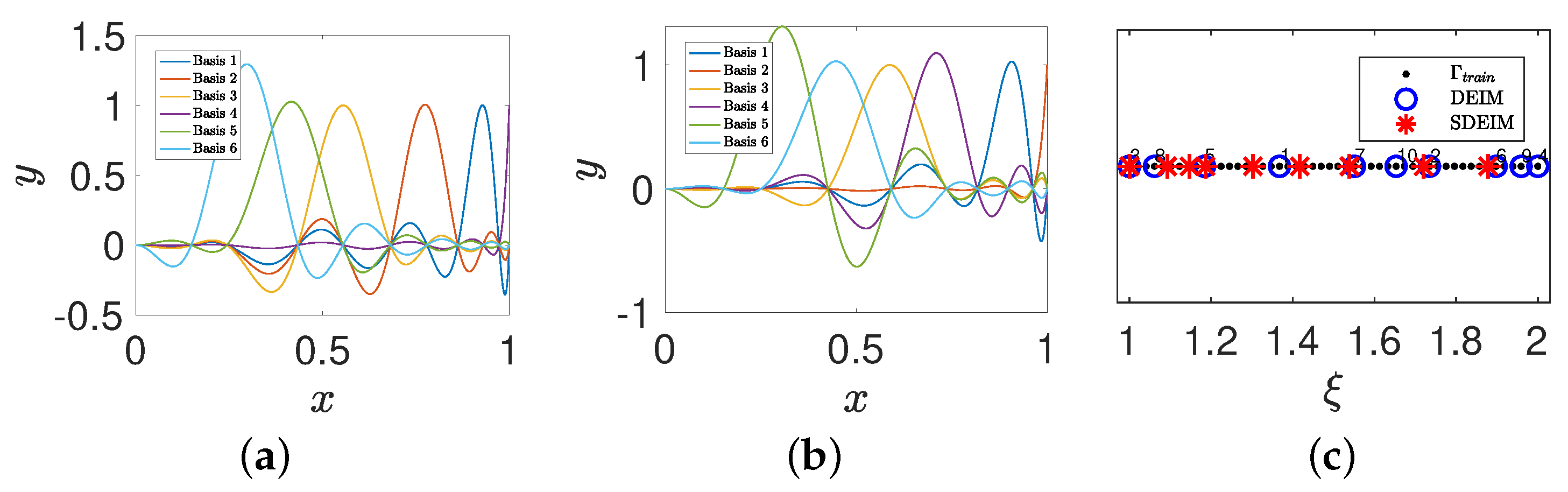
4.1. A Nonlinear Parameterized Function with Spatial Points in One Dimension
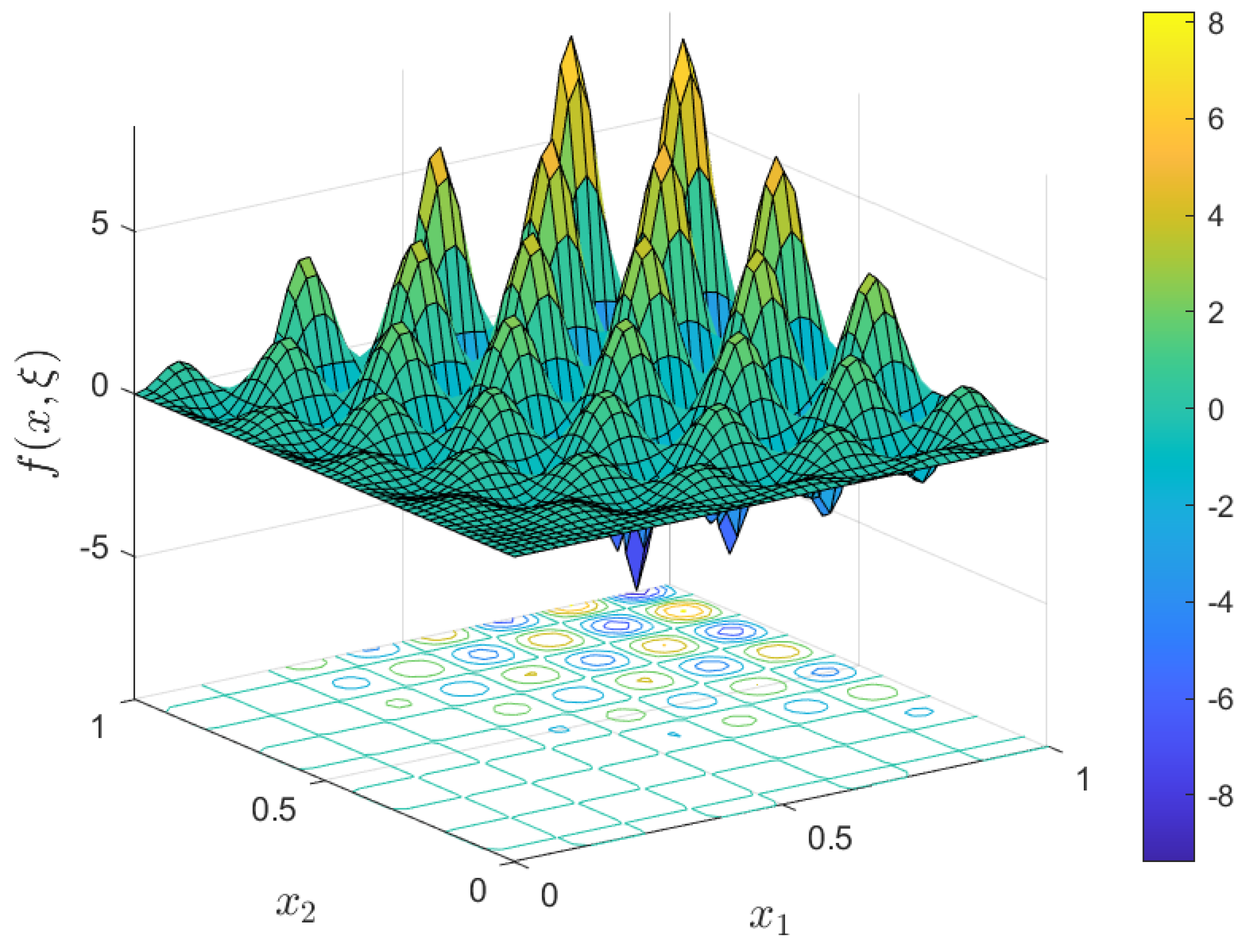
4.2. A Nonlinear Parameterized Function with Spatial Points in Two Dimensions
4.3. Random Fields
4.4. The FitzHugh–Nagumo (F-N) System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benner, P.; Gugercin, S.; Willcox, K. A survey of projection-based model reduction methods for parametric dynamical systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. C. R. Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Maday, Y.; Mula, O. A generalized empirical interpolation method: Application of reduced basis techniques to data assimilation. In Analysis and Numerics of Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2013; pp. 221–235. [Google Scholar]
- Chen, P.; Quarteroni, A.; Rozza, G. A weighted empirical interpolation method: A priori convergence analysis and applications. ESAIM Math. Model. Numer. Anal. 2014, 48, 943–953. [Google Scholar] [CrossRef] [Green Version]
- Elman, H.C.; Forstall, V. Numerical solution of the parameterized steady-state Navier–Stokes equations using empirical interpolation methods. Comput. Methods Appl. Mech. Eng. 2017, 317, 380–399. [Google Scholar] [CrossRef] [Green Version]
- Chaturantabut, S.; Sorensen, D.C. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Butnaru, D.; Willcox, K.; Bungartz, H.J. Localized discrete empirical interpolation method. SIAM J. Sci. Comput. 2014, 36, A168–A192. [Google Scholar] [CrossRef]
- Li, Q.; Jiang, L. A novel variable-separation method based on sparse and low rank representation for stochastic partial differential equations. SIAM J. Sci. Comput. 2017, 39, A2879–A2910. [Google Scholar] [CrossRef]
- Veroy, K.; Rovas, D.V.; Patera, A.T. A posteriori error estimation for reduced-basis approximation of parametrized elliptic coercive partial differential equations: “Convex inverse” bound conditioners. ESAIM Control. Optim. Calc. Var. 2002, 8, 1007–1028. [Google Scholar] [CrossRef] [Green Version]
- Quarteroni, A.; Rozza, G. Numerical solution of parametrized Navier–Stokes equations by reduced basis methods. Numer. Methods Partial Differ. Equ. Int. J. 2007, 23, 923–948. [Google Scholar] [CrossRef]
- Chen, P.; Quarteroni, A.; Rozza, G. Comparison between reduced basis and stochastic collocation methods for elliptic problems. J. Sci. Comput. 2014, 59, 187–216. [Google Scholar] [CrossRef]
- Jiang, J.; Chen, Y.; Narayan, A. A goal-oriented reduced basis methods-accelerated generalized polynomial chaos algorithm. SIAM/ASA J. Uncertain. Quantif. 2016, 4, 1398–1420. [Google Scholar] [CrossRef]
- Elman, H.C.; Liao, Q. Reduced basis collocation methods for partial differential equations with random coefficients. SIAM/ASA J. Uncertain. Quantif. 2013, 1, 192–217. [Google Scholar] [CrossRef] [Green Version]
- Liao, Q.; Lin, G. Reduced basis ANOVA methods for partial differential equations with high-dimensional random inputs. J. Comput. Phys. 2016, 317, 148–164. [Google Scholar] [CrossRef] [Green Version]
- Cohen, A.; Dahmen, W.; DeVore, R.; Nichols, J. Reduced basis greedy selection using random training sets. ESAIM Math. Model. Numer. Anal. 2020, 54, 1509–1524. [Google Scholar] [CrossRef] [Green Version]
- Rocsoreanu, C.; Georgescu, A.; Giurgiteanu, N. The FitzHugh–Nagumo Model: Bifurcation and Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 10. [Google Scholar]
- Grepl, M.A.; Maday, Y.; Nguyen, N.C.; Patera, A.T. Efficient reduced-basis treatment of nonaffine and nonlinear partial differential equations. ESAIM Math. Model. Numer. Anal. 2007, 41, 575–605. [Google Scholar] [CrossRef] [Green Version]
- Maday, Y.; Stamm, B. Locally adaptive greedy approximations for anisotropic parameter reduced basis spaces. SIAM J. Sci. Comput. 2013, 35, A2417–A2441. [Google Scholar] [CrossRef] [Green Version]
- Temlyakov, V.N. Nonlinear Kolmogorov widths. Math. Notes 1998, 63, 785–795. [Google Scholar] [CrossRef]
- Cuong, N.N.; Veroy, K.; Patera, A.T. Certified real-time solution of parametrized partial differential equations. In Handbook of Materials Modeling; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1529–1564. [Google Scholar]
- Kristoffersen, S. The Empirical Interpolation Method. Master’s Thesis, Institutt for Matematiske Fag, Trondheim, Norway, 2013. [Google Scholar]
- Dudley, R.M. Real Analysis and Probability; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Hoeffding, W. Probability inequalities for sums of bounded random variables. In The Collected Works of Wassily Hoeffding; Springer: Berlin/Heidelberg, Germany, 1994; pp. 409–426. [Google Scholar]
- Ghanem, R.G.; Spanos, P.D. Stochastic Finite Elements: A Spectral Approach; Courier Corporation: Chelmsford, MA, USA, 2003. [Google Scholar]
- Lord, G.J.; Powell, C.E.; Shardlow, T. An Introduction to Computational Stochastic PDEs; Cambridge University Press: Cambridge, UK, 2014; Volume 50. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | Number of Comparisons | ||||
|---|---|---|---|---|---|
| SDEIM | 9 | ||||
| 10 | 0 | ||||
| DEIM | 10 | 0 | 550 |
| n | Number of Comparisons | ||||
|---|---|---|---|---|---|
| SDEIM | 173 | ||||
| 204 | |||||
| DEIM | 177 | 40,050 | |||
| 184 | 74,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, D.; Yao, C.; Liao, Q. A Stochastic Discrete Empirical Interpolation Approach for Parameterized Systems. Symmetry 2022, 14, 556. https://doi.org/10.3390/sym14030556
Cai D, Yao C, Liao Q. A Stochastic Discrete Empirical Interpolation Approach for Parameterized Systems. Symmetry. 2022; 14(3):556. https://doi.org/10.3390/sym14030556
Chicago/Turabian StyleCai, Daheng, Chengbin Yao, and Qifeng Liao. 2022. "A Stochastic Discrete Empirical Interpolation Approach for Parameterized Systems" Symmetry 14, no. 3: 556. https://doi.org/10.3390/sym14030556