
Machine Learning in Conventional Tunnel Deformation in High In Situ Stress Regions


Abstract
:1. Introduction
2. Project Overview and Construction Plan
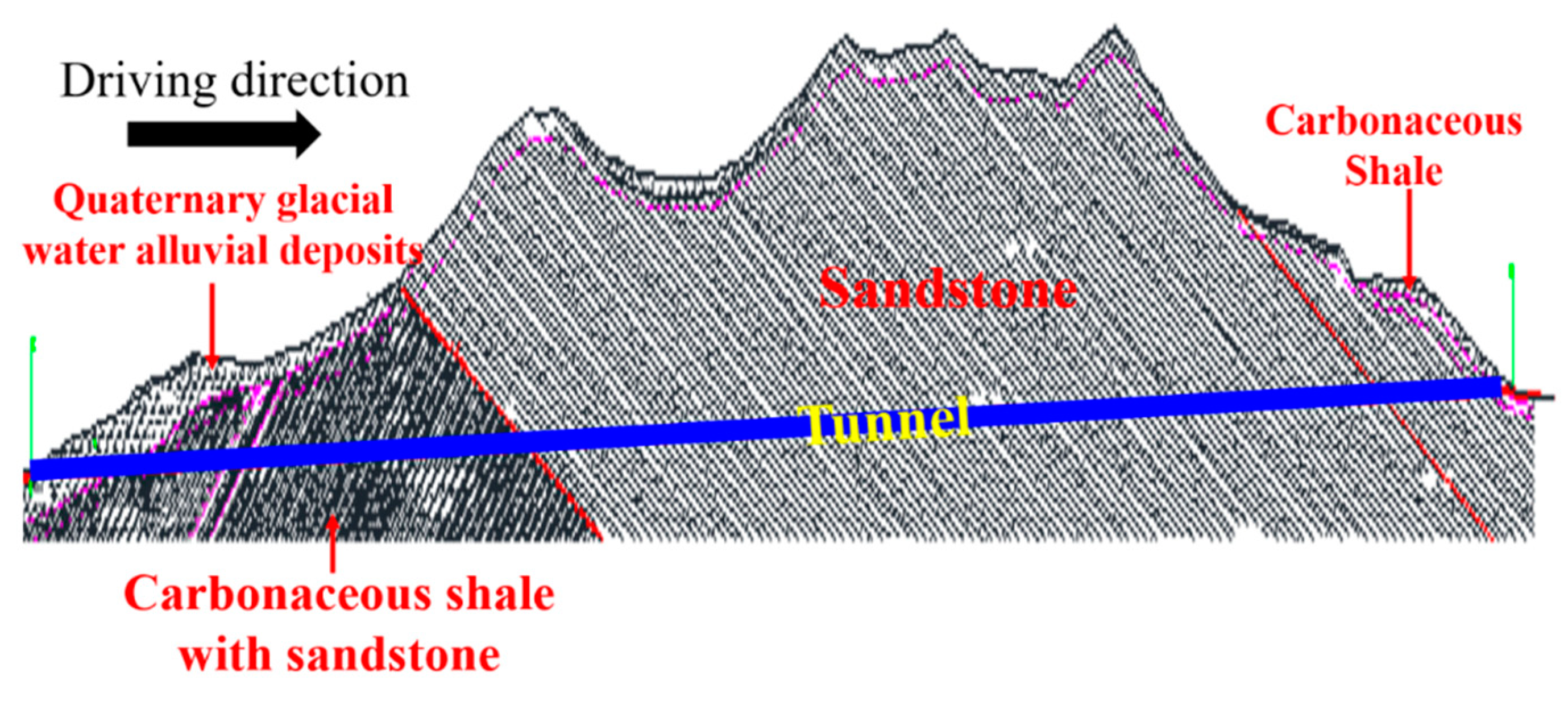
2.1. Project Overview
2.2. Construction Plan
3. Numerical Simulation of Tunnel Deformation
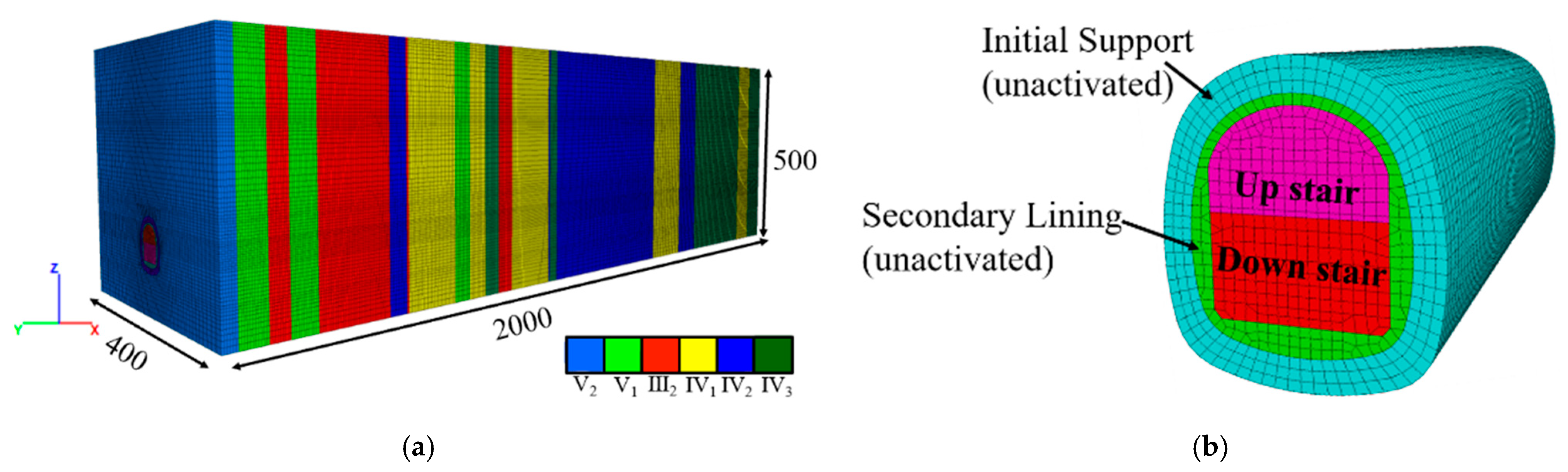
3.1. The Establishment of Three-Dimensional Numerical Model
3.2. Material Parameters
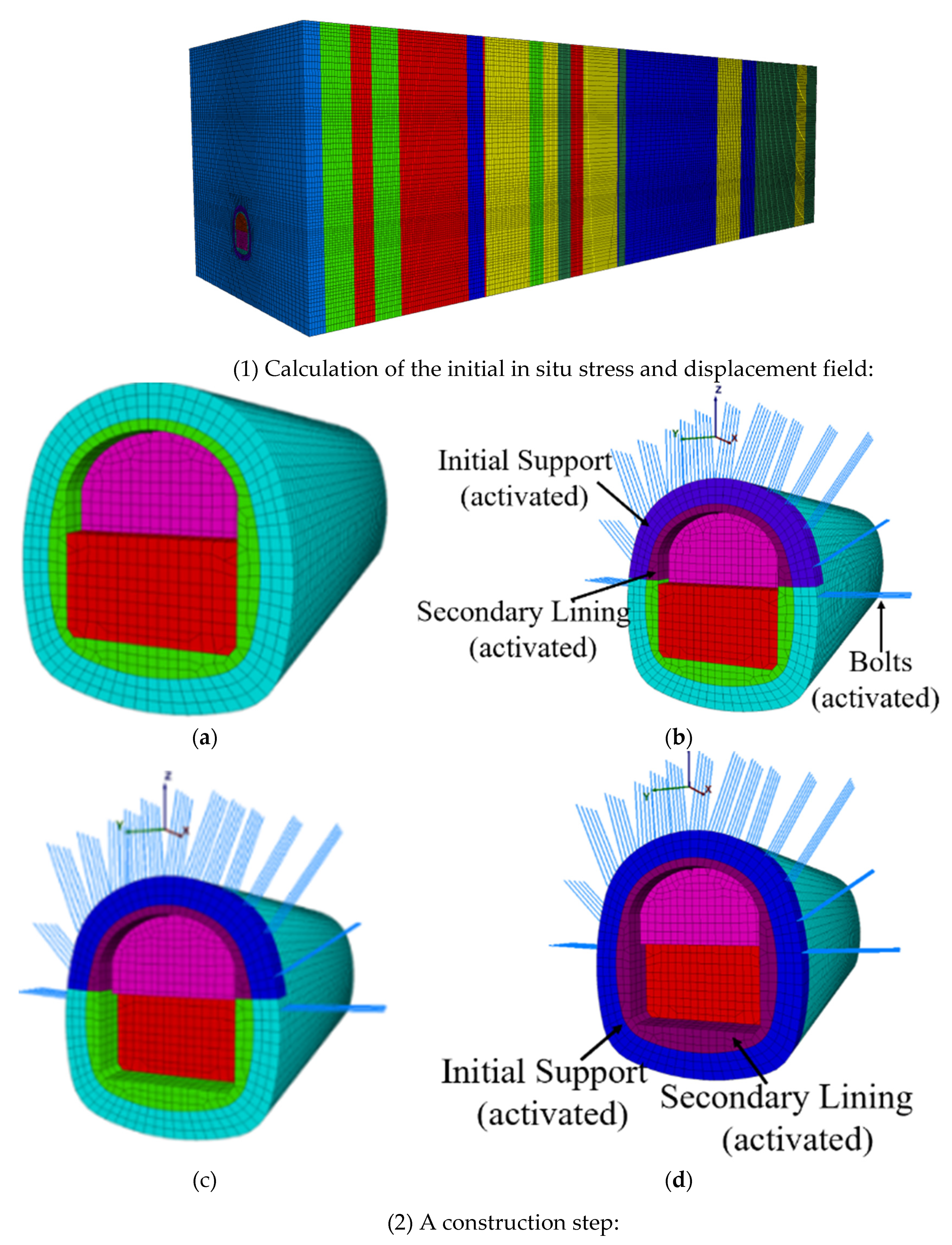
3.3. Numerical Simulation Steps
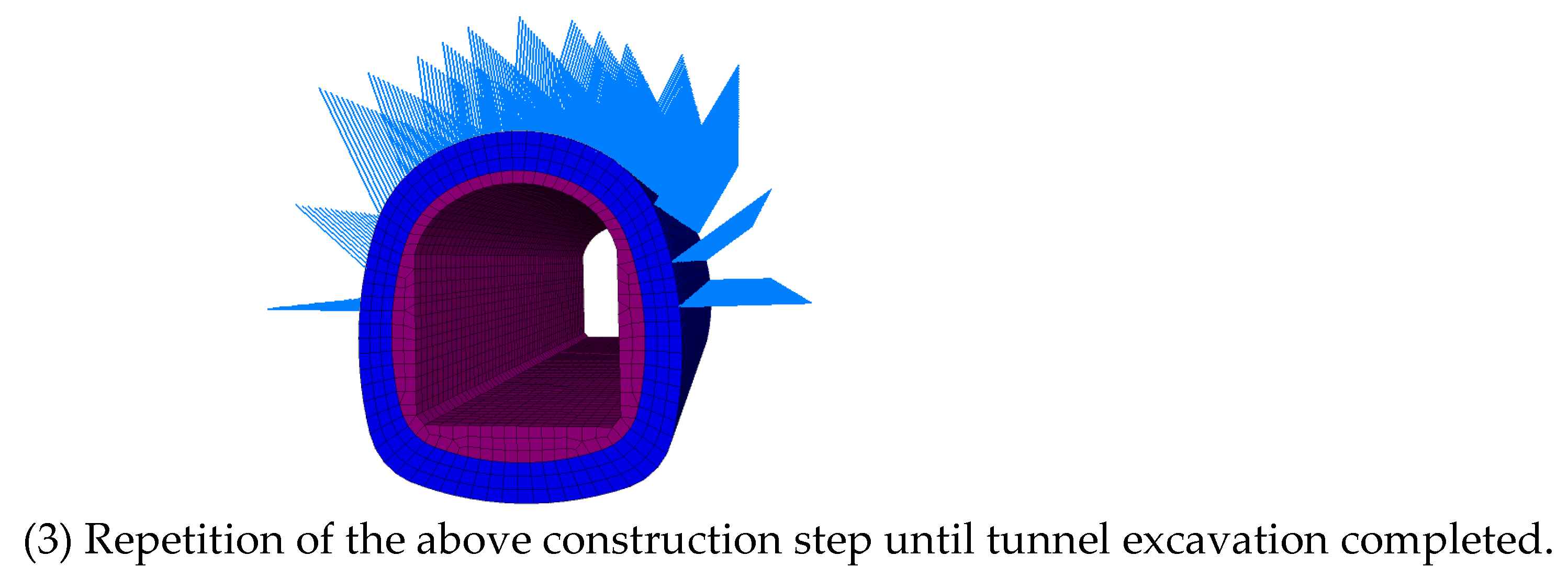
3.4. Result Analysis
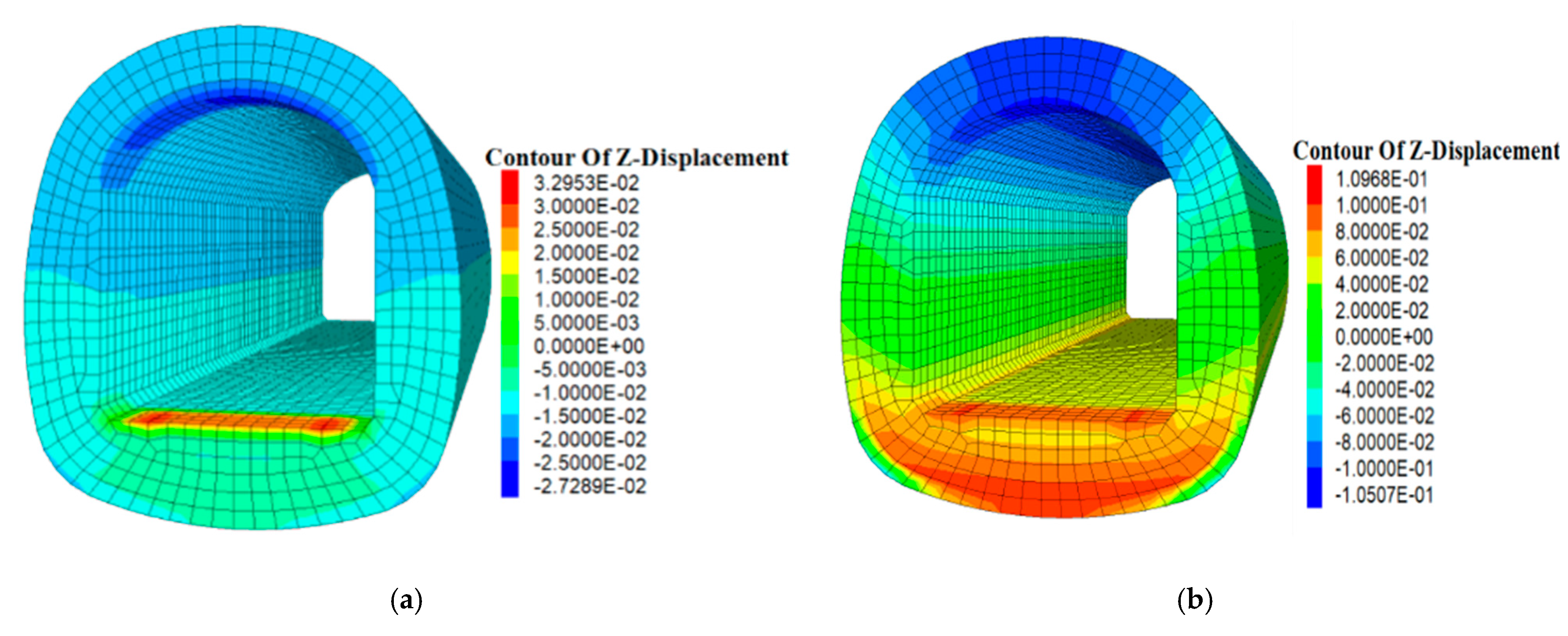
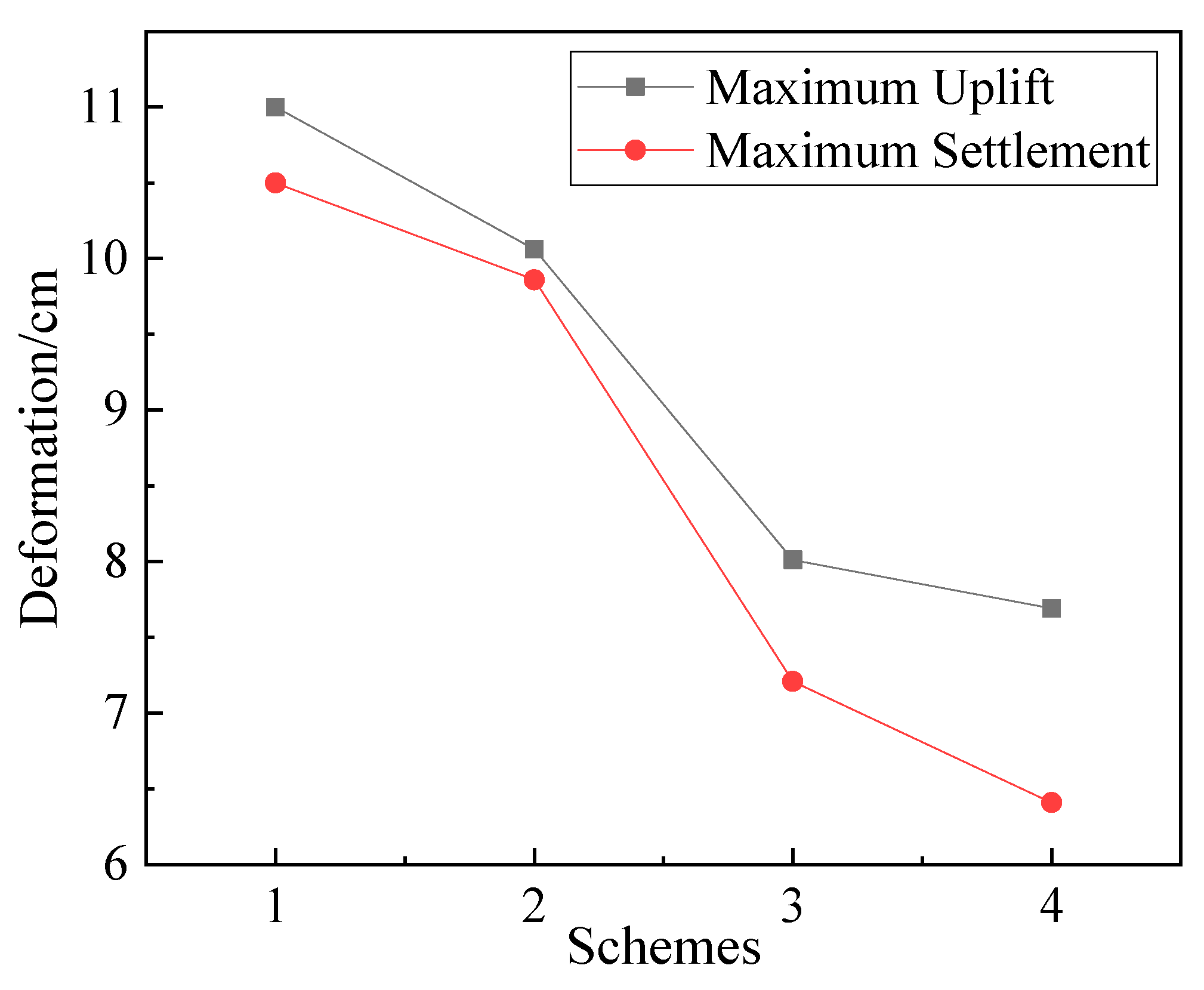
3.5. Optimization of Bolt Parameters
4. Algorithm Introduction
4.1. Maximal Information Coefficient (MIC)
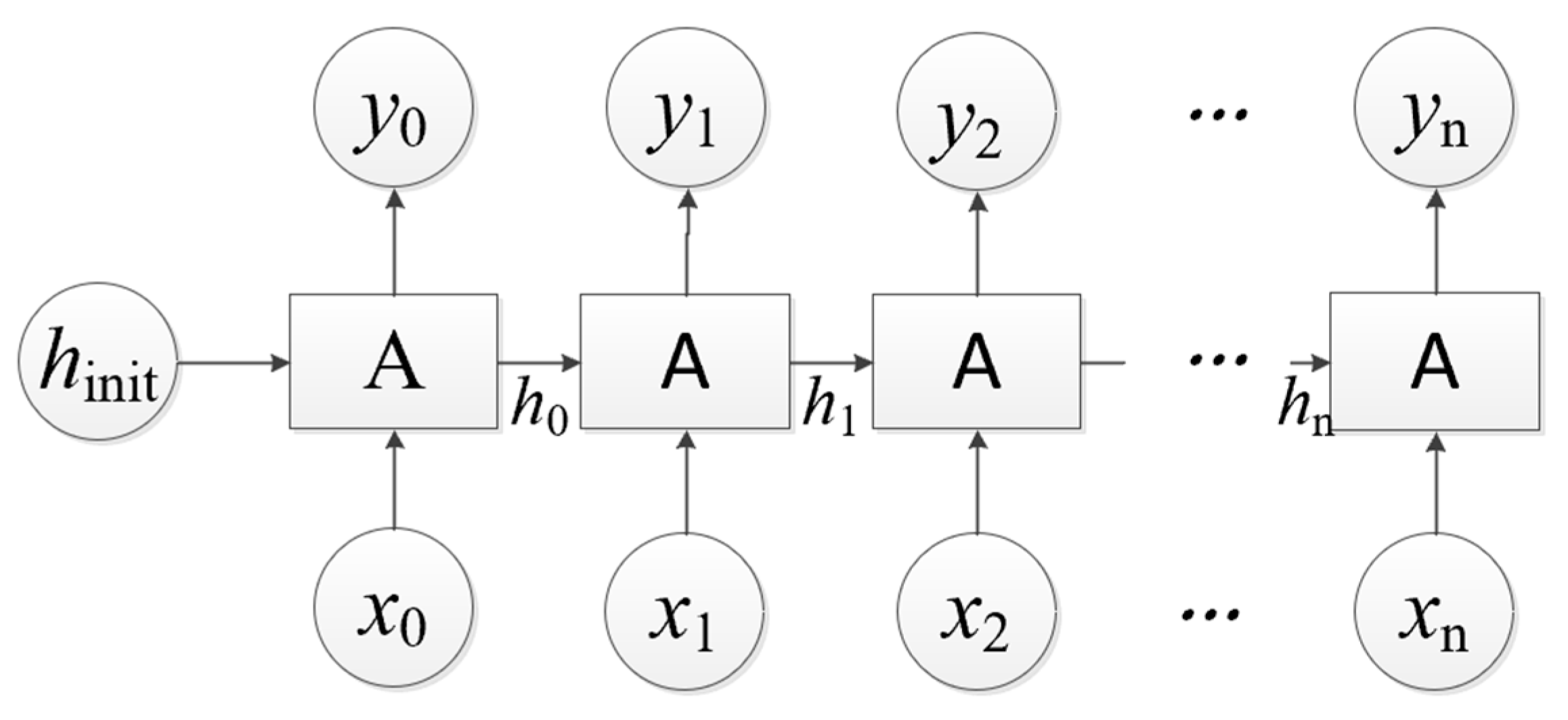
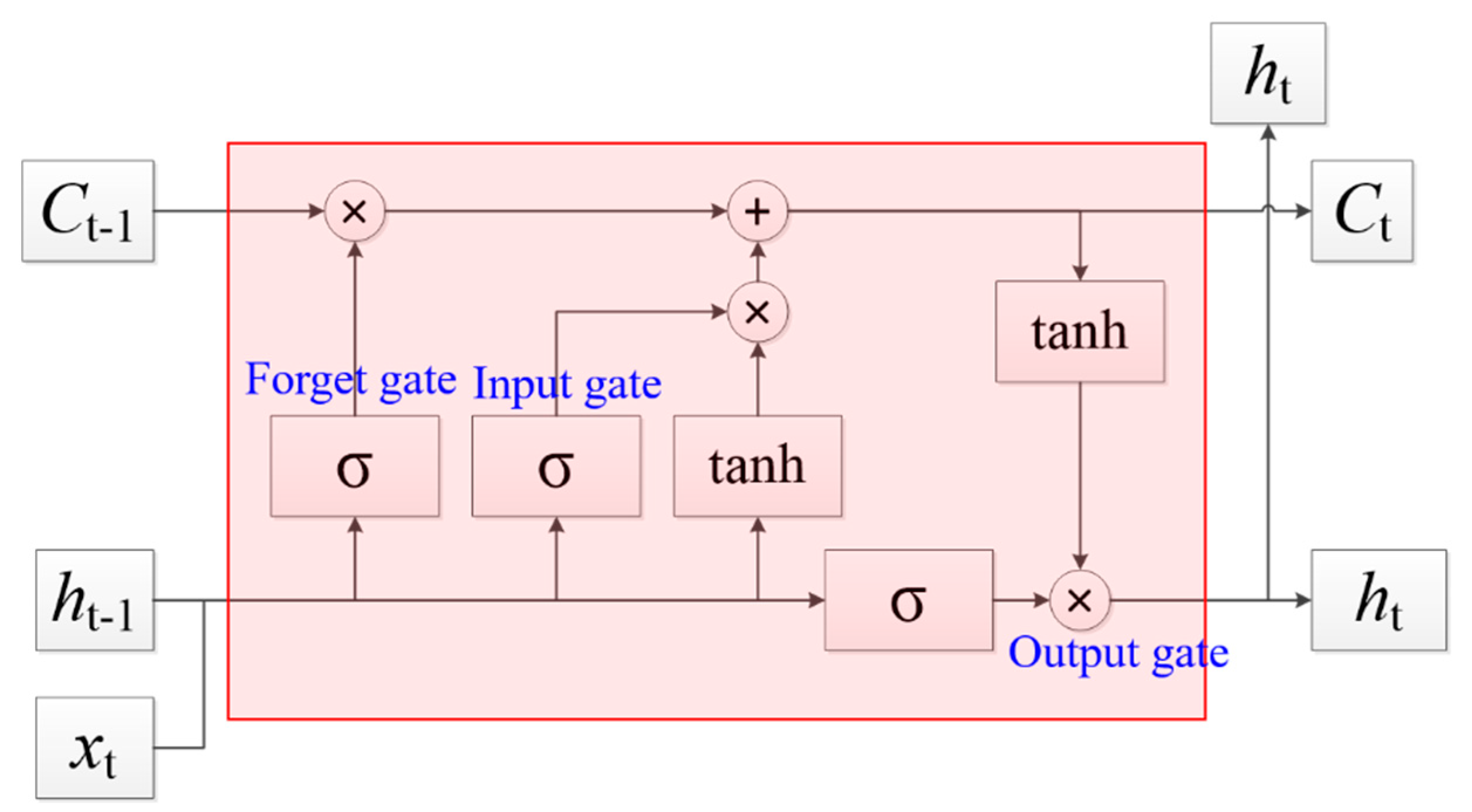
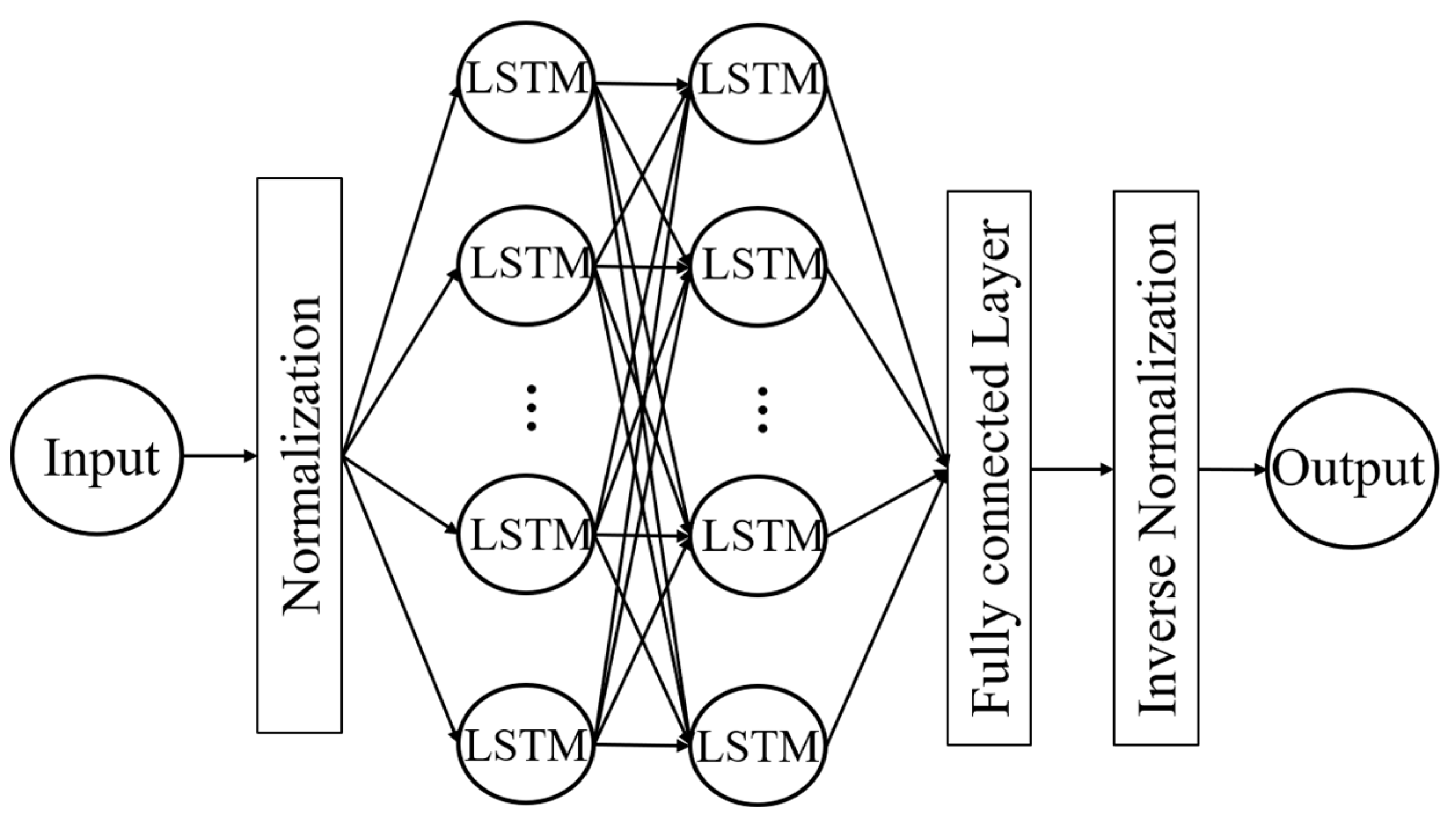
4.2. Long Short-Term Memory (LSTM)
5. Case Study
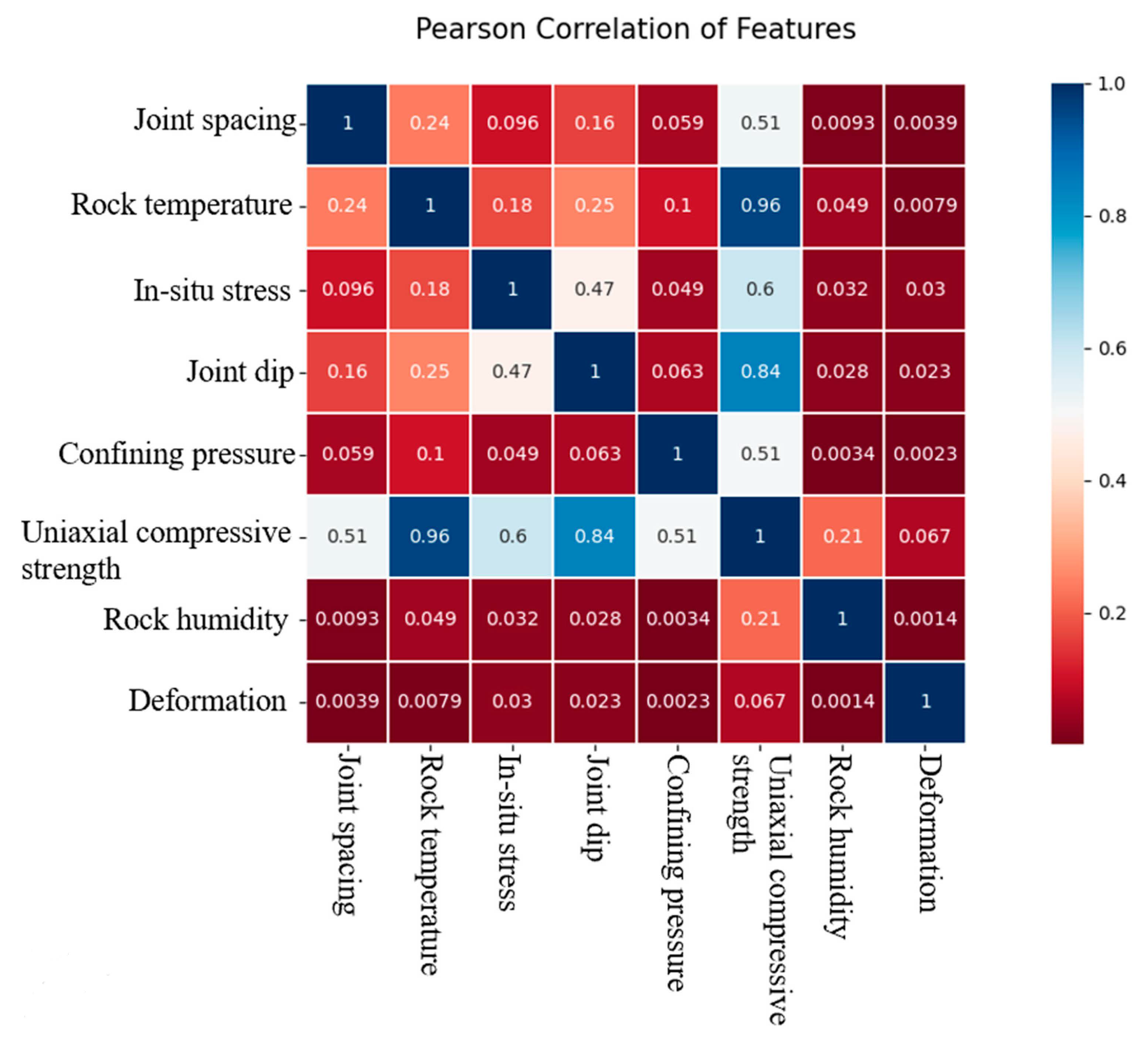
5.1. Parameter Correlation Analysis
5.2. Tunnel Deformation Prediction
5.2.1. Data Preparation
5.2.2. Model Training
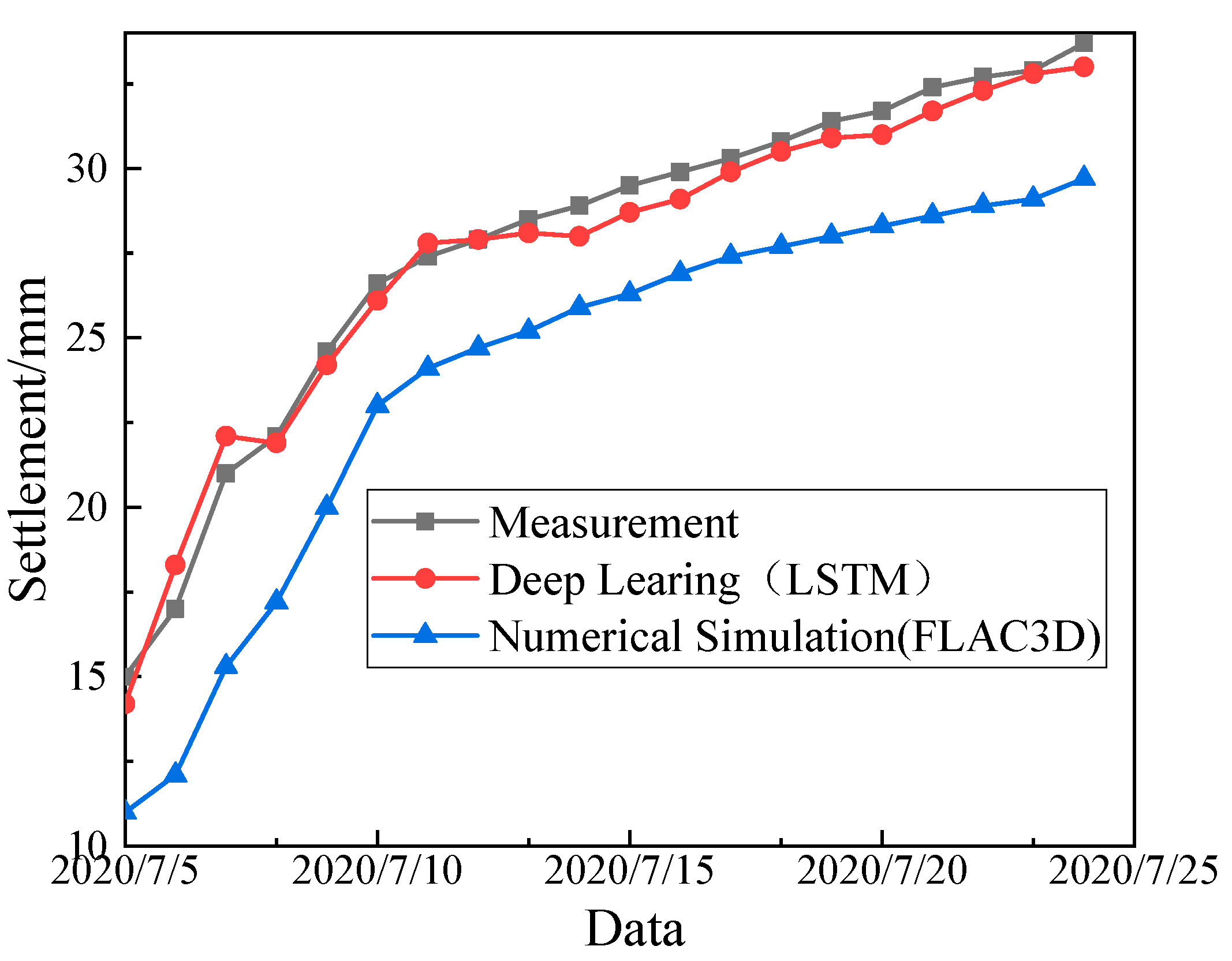
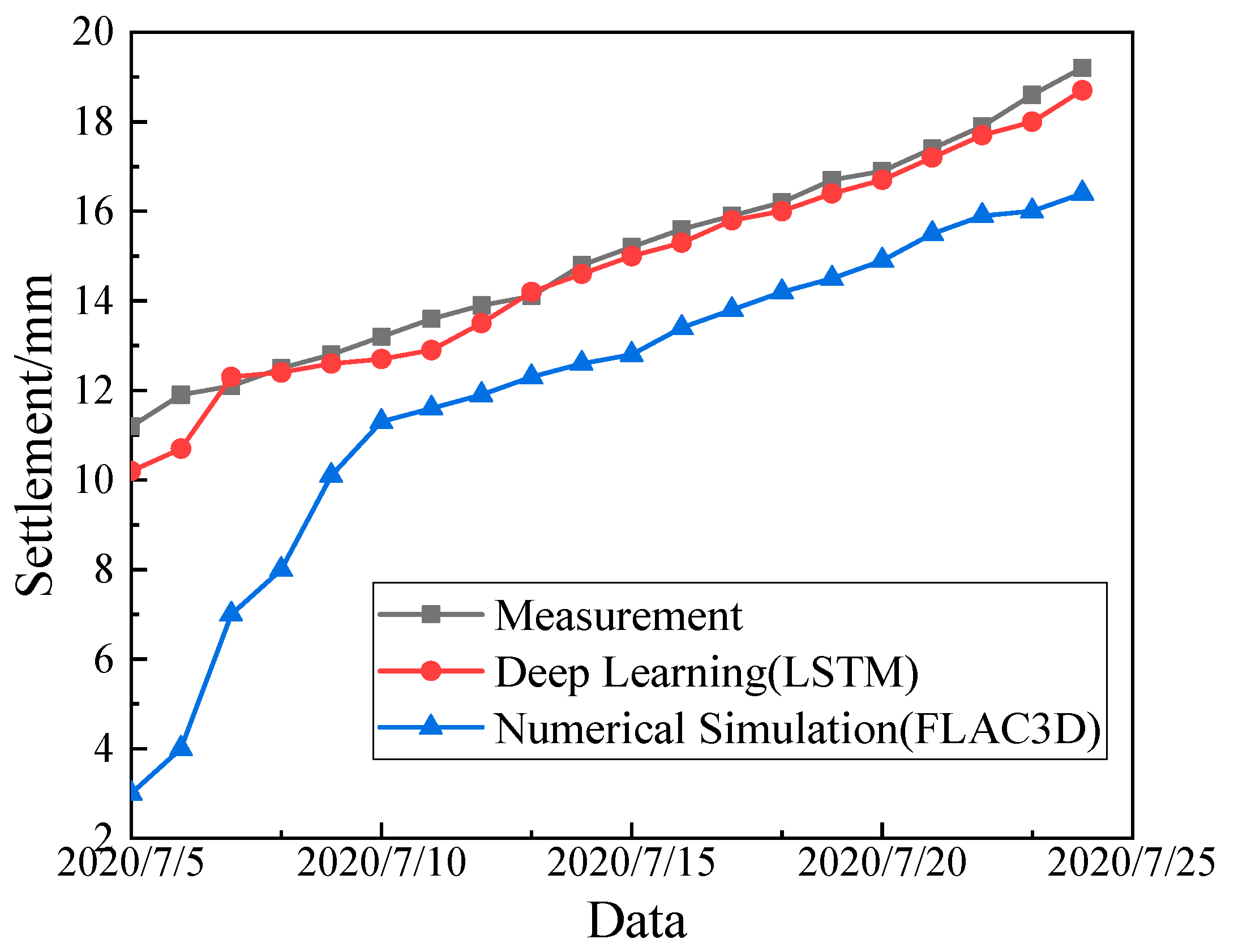
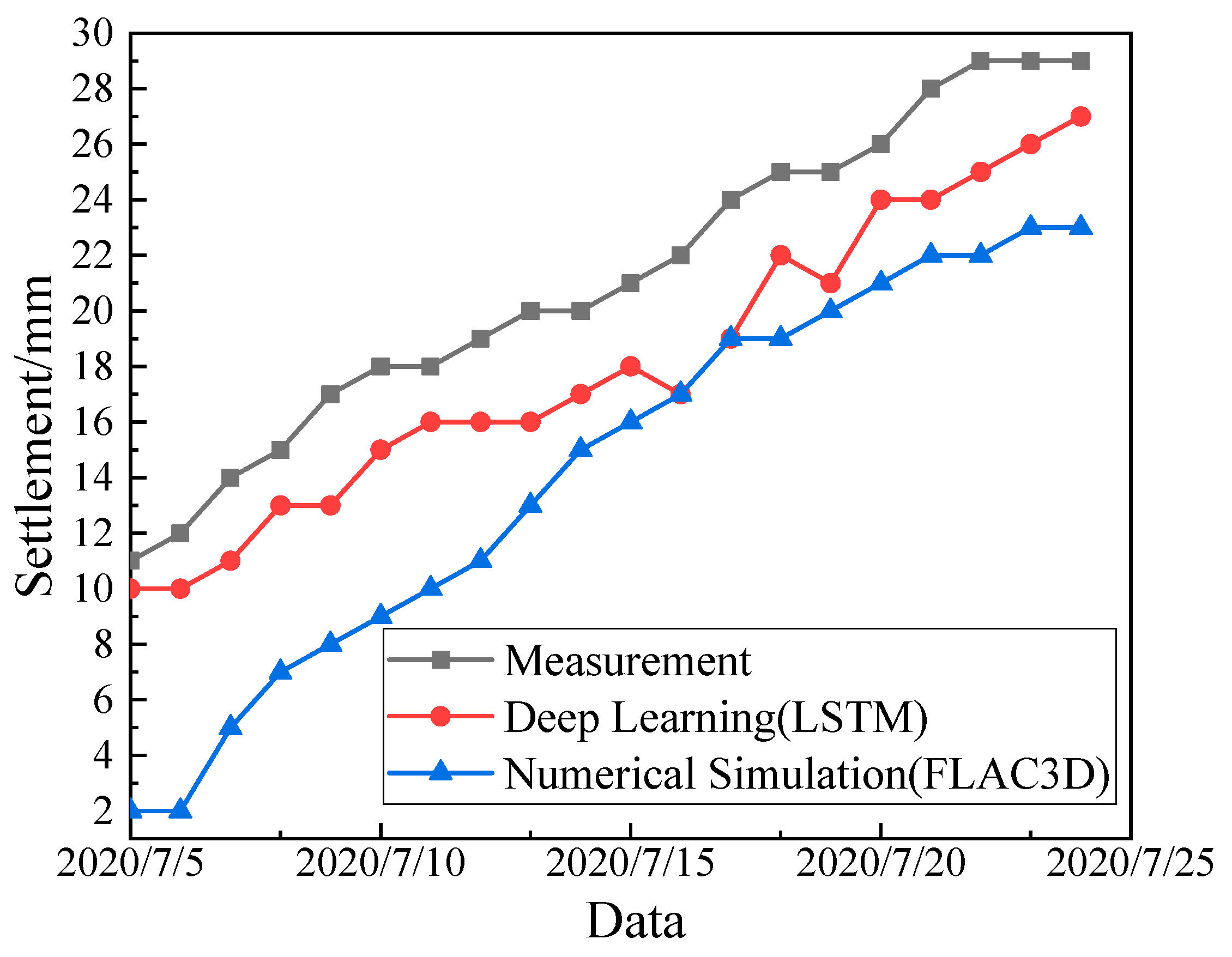
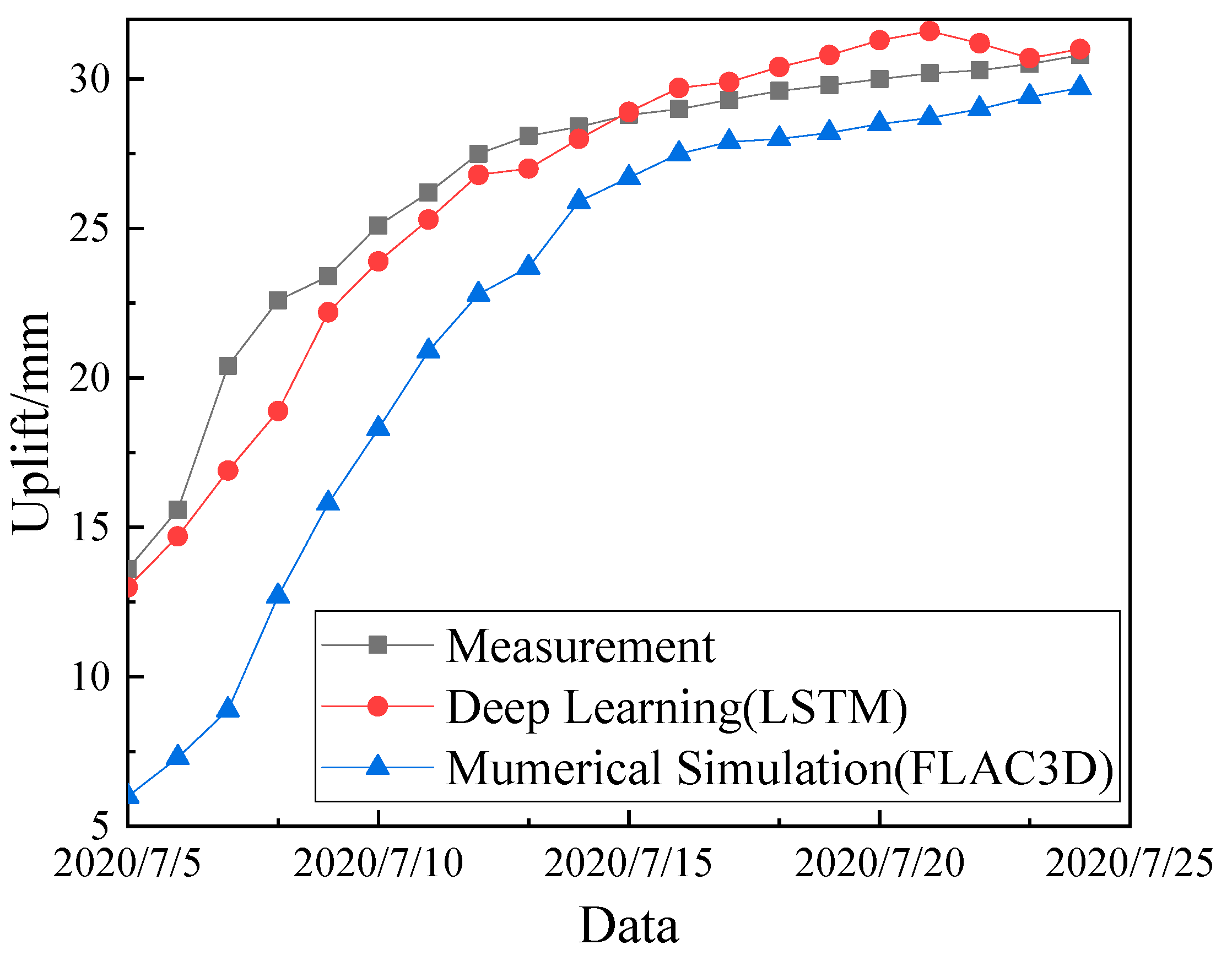
5.2.3. Result Analysis
6. Conclusions
- (1)
- Through the FLAC3D numerical simulation, we found that along with the excavation of the tunnel, the settlement of the vault would gradually increase, and the maximum value would be located at the excavation hole. The new construction plan could effectively control the deformation of the tunnel and meet the specification requirements. Then, the parameters of the bolt were further optimized, and finally, the optimal parameters of the bolt were selected for construction.
- (2)
- The MIC algorithm was used to obtain the correlations of the parameters by studying the monitoring data. We found that the parameters correlated with tunnel deformation were rock uniaxial compressive strength, in situ stress, joint dip, rock temperature, joint spacing, confining pressure, and rock humidity, respectively, from high to low.
- (3)
- The LSTM algorithm was used to analyze the temporal characteristics of monitoring data. We found that the MAE and RMSE values of the prediction model were small, and the values of R2 were all greater than 90%, indicating that the model achieved good results on the training and test sets. The results show that the prediction curve based on the deep learning model had a higher similarity to the monitoring curve compared to the numerical analysis. The MIC-LSTM machine algorithm provides a new idea for the deformation prediction of the tunnels.
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Z.Q.; He, C.; Xu, G.W. A Case Study on the Asymmetric Deformation Characteristics and Mechanical Behavior of Deep Buried Tunnel in Phyllite. Rock Mech. Rock Eng. 2019, 52, 4527–4545. [Google Scholar] [CrossRef]
- Chen, Z.Q.; He, C.; Xu, G.W. Supporting mechanism and mechanical behavior of a double primary support method for tunnels in broken phyllite under high geo-stress: A case study. Bull. Eng. Geol. Environ. 2019, 78, 5253–5267. [Google Scholar] [CrossRef]
- Zhang, C.; Feng, X.T.; Zhou, H. Estimation of in situ stress along deep tunnels buried in complex geological conditions. Int. J. Rock Mech. Min. Sci. 2012, 52, 139–162. [Google Scholar] [CrossRef]
- Meng, L.B.; Li, T.B.; Jiang, Y.; Wang, R.; Li, Y.R. Characteristics and mechanics of large deformation in the Zhegu mountain tunnel on the Sichuan-Tibet highway. Tunn. Undergr. Space Technol. 2013, 37, 157–164. [Google Scholar] [CrossRef]
- Bobet, A. Lined circular tunnels in elastic transversely anisotropic rock at depth. Rock Mech. Rock Eng. 2011, 44, 149–167. [Google Scholar] [CrossRef]
- Cao, C.Y.; Shi, C.H.; Lei, M.F. Squeezing failure of tunnels: A case study. Tunn. Undergr. Space Technol. 2018, 77, 188–203. [Google Scholar] [CrossRef]
- Wang, Y. Study on the Initial Support’s Mechanical Effects of Soft Rock Tunnel under High Geo-Stress; Chongqing University: Chongqing, China, 2013. [Google Scholar]
- Xu, F.; Li, S.C.; Zhang, Q.Q. A new type support structure introduction and its contrast study with traditional support structure used in tunnel construction. Tunn. Undergr. Space Technol. 2017, 63, 171–182. [Google Scholar] [CrossRef]
- Yin, L.Z.; Yang, W. Topology optimization for tunnel support in layered geological structures. Int. J. Numer. Methods Eng. 2015, 47, 1983–1996. [Google Scholar] [CrossRef]
- Hoek, E.; Paul Marinos, P. Predicting tunnel squeezing problems in weak heterogeneous rock masses. Tunn. Tunn. Int. 2000, 32, 45–51. [Google Scholar]
- Jethwa, J.L.; Singh, B.; Singh, B. Estimation of ultimate rock pressure for tunnel linings under squeezing rock conditions—A new approach. In Design and Performance of Underground Excavations; ISRM Symposium: Cambridge, UK, 1984. [Google Scholar]
- Wood, A.M.M. Tunnels for roads and motorways. Q. J. Eng. Geol. 1972, 5, 111–126. [Google Scholar] [CrossRef]
- Saari, K. Analysis of Plastic Deformation (Squeezing) of Layers Intersecting Tunnels and Shafts in Rock [Dissertation]; Berkeley University of California: Berkeley, CA, USA, 1982. [Google Scholar]
- Aydan, Ö.; Akagi, T.; Kawamoto, T. The squeezing potential of rocks around tunnels: Theory and prediction. Rock Mech. Rock Eng. 1993, 26, 137–163. [Google Scholar] [CrossRef]
- Hoek, E. Big Tunnels in Bad Rock. J. Geotech. Geoenviron. Eng. 2001, 127, 726–740. [Google Scholar] [CrossRef]
- Barla, G.B. Design analyses for tunnels in squeezing rock//International Conference of Iacmag. In Proceedings of the 11th International Conference of IACMAG, Torino, Italy, 19–24 June 2005. [Google Scholar]
- Hu, P.; Song, L.; Zhang, H. Baima Tunnel Soft Rock Large Deformation Mechanism and Evaluation of Deformation Control Effect of Long Bolt. Mod. Tunn. Technol. 2019, 56, 239–246. [Google Scholar]
- Li, L.; Tan, Z.S.; Yu, Y. Experimental study on primary lining form of tunnels in phyllite on Chengdu-Lanzhou railway. China Civ. Eng. J. 2017, 50, 19. [Google Scholar]
- Jia, J.Q.; Zheng, W.F.; Chen, G.Z. Numerical analysis of prestressed bolt flexible retaining method. Chin. J. Rock Mech. Eng. 2005, 24, 3798–3982. [Google Scholar]
- Li, J.; Yian, T.; Liu, Q. Study on Excavation Disturbance Characteristics of High Ground Stress Soft Rock Tunnels. IOP Conf. Series Earth Environ. Sci. 2020, 455, 012172. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, Y.; Shi, P.X. Face stability analysis of shield driven tunnels shallowly buried in dry sand using 1 g large-scale model tests. Acta Geotech. 2018, 13, 693–705. [Google Scholar] [CrossRef]
- Liu, W.; Wu, B.; Shi, P.X.; Xu, X.Y. Analysis on face stability of rectangular cross-sectional shield tunneling based on an improved two-dimensional rotational mechanism. Acta Geotech. 2021, 16, 3725–3738. [Google Scholar] [CrossRef]
- Chen, R.P.; Tang, L.J.; Yin, X.S.; Chen, Y.M.; Bian, X.C. An improved 3D wedge-prism model for the face stability analysis of the shield tunnel in cohesionless soils. Acta Geotech. 2015, 10, 683–692. [Google Scholar] [CrossRef]
- Idinger, G.; Aklik, P.; Wu, W.; Borja, R. Centrifuge model test on the face stability of shallow tunnel. Acta Geotech. 2011, 6, 105–117. [Google Scholar] [CrossRef] [Green Version]
- Lv, X.L.; Zeng, S.; Zhao, Y.; Huang, M.; Zhang, Z. Physical model tests and discrete element simulation of shield tunnel face stability in anisotropic granular media. Acta Geotech. 2020, 15, 3017–3026. [Google Scholar]
- Zhang, J.W.; Zhao, C.L.; Ma, X.J. Mechanism and Control Technology Study of Large Deformation for Soft Rock Tunnel. Electron. J. Geotech. Eng. 2014, 19, 2643–2656. [Google Scholar]
- Pan., F.; Cheng, S.G.; Pan., F.; Cheng, S.G. Analysis of Deformation Mechanism and Control Technology of Soft Rock Tunnel with High Geostress. Appl. Mech. Mater. 2014, 638-640, 794–797. [Google Scholar] [CrossRef]
- Tao, Z.G.; Zhao, F.; Wang, H.J.; Zhang, H.J.; Peng, Y.Y. Innovative constant resistance large deformation bolt for rock support in high stressed rock mass. Arab. J. Geosci. 2017, 10, 341–355. [Google Scholar]
- Anagnostou, G. A model for swelling rock in tunnelling. Rock Mech. Rock Eng. 1993, 26, 307–331. [Google Scholar] [CrossRef]
- Zhou, M.Z.; Fang, Q.; Peng, C. A mortar segment-to-segment contact method for stabilized total-Lagrangian smoothed particle hydrodynamics. Appl. Math. Model. 2022, in press. [CrossRef]
- Jin, Y.F.; Yin, Z.Y. An intelligent multiobjective EPR technique with multistep model selection for correlations of soil properties. Acta Geotech. 2020, 15, 2053–2073. [Google Scholar] [CrossRef]
- Atangana Njock, P.G.; Shen, S.L.; Zhou, A.; Lyu, H.M. Evaluation of soil liquefaction using AI technology incorporating a couples ENN/t-SNE model. Soil Dyn. Earthq. Eng. 2020, 130, 105988. [Google Scholar] [CrossRef]
- Elbaz, K.; Shen, S.-L.; Sun, W.-J.; Yin, Z.-Y.; Zhou, A. Prediction model of shield performance during tunneling by incorporating improved Particle Swarm Optimization into ANFIS. IEEE Access 2020, 8, 39659–39671. [Google Scholar] [CrossRef]
- Jin, Y.F.; Yin, Z.Y.; Zhou, W.H.; Liu, X.F. Intelligent model selection with updating parameters during staged excavation using optimization method. Acta Geotech. 2020, 15, 2473–2491. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, H.N.; Chen, R.P.; Dai, T.; Meng, F.Y.; Wang, H.B. A critical evaluation of machine learning and deep learning in shield-ground interaction prediction. Tunn. Undergr. Space Technol. 2020, 99, 103383. [Google Scholar] [CrossRef]
- Zhu, H.H.; Wang, X.; Chen, X.Q.; Zhang, L.L. Similarity search and performance prediction of shield tunnels in operation through time series data mining. Autom. Constr. 2020, 114, 103178. [Google Scholar] [CrossRef]
- Lin, S.-S.; Shen, S.L.; Zhang, N.; Zhou, A. Modelling the performance of EPB shield tunnelling using machine and deep learning algorithms. Geosci. Front. 2021, 12, 101177. [Google Scholar] [CrossRef]
- Elbaz, K.E.A. Performance Prediction of Tunnel Boring Machine by Using Machine Learning Techniques; Shanghai Jiao Tong University: Shanghai, China, 2019. [Google Scholar]
- Zhou, C.; Xu, H.; Ding, L.; Wei, L.; Zhou, Y. Dynamic prediction for attitude and position in shield tunneling: A deep learning method. Autom. Constr. 2019, 105, 102840. [Google Scholar] [CrossRef]
- GB/T 50218-2014; Standard for Engineering Classification of Rock Mass. Ministry of Housing and Urban-Rural Development of the People’s Republic of China: Beijing, China, 2014. (In Chinese)
- JTG/T D70-2010; Guidelines for Design of Highway Tunnel. Ministry of Transport of the People’s Republic of China: Beijing, China, 2010. (In Chinese)
- JTGD70-2018; Code for Design of Road Tunnel. Ministry of Transport of the People’s Republic of China: Beijing, China, 2018. (In Chinese)
- Reshef, D.N.; Reshef, Y.A.; Finucane, H.K.; Grossman, S.R.; McVean, G.; Turnbaugh, P.J.; Lander, E.S.; Mitzenmache, M.; Sabeti, P.C. Detecting novel associations in large data sets. Science 2011, 334, 1518–1524. [Google Scholar] [CrossRef] [Green Version]
- Lipton, Z.C.; Berkowitz, J.; Elkan, C. A Critical Review of Recurrent Neural Networks for Sequence Learning. arXiv 2015, arXiv:1506.00019.cience. [Google Scholar]
- Schuster, M.; Paliwal, K.K. Bidirectional recurrent neural networks. IEEE Trans. Signal Processing 1997, 45, 2673–2681. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short⁃term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Hua, Y.X.; Zhao, Z.F.; Li, R.P. Deep learning with long short-term memory for time series prediction. IEEE Commun. Mag. 2019, 57, 114–119. [Google Scholar] [CrossRef] [Green Version]
- Greff, K.; Srivastava, R.K.; Koutnik, J. LSTM: A search space odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2222–2232. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | V2 | V1 | IV3 | IV2 | IV1 | III2 | |
|---|---|---|---|---|---|---|---|
| Tunnel | |||||||
| Left line | 1.6% | 8.4% | 21.1% | 22.4% | 35.1% | 11.4% | |
| Right line | 1.7% | 8.1% | 22.1% | 22.7% | 30.8% | 14.6% | |
| Classification | V2 | V1 | IV3 | IV2 | IV1 | III2 | |
|---|---|---|---|---|---|---|---|
| Parameters | |||||||
| ρ/(kg/m−3) | 1600 | 1800 | 2000 | 2200 | 2400 | 2600 | |
| E/(GPa) | 1.3 | 2.0 | 2.4 | 3.8 | 7.0 | 10.7 | |
| υ | 0.45 | 0.39 | 0.35 | 0.33 | 0.31 | 0.30 | |
| ϕ/° | 22 | 25 | 35 | 45 | 50 | 55 | |
| c/(MPa) | 2 | 5 | 10 | 15 | 20 | 25–30 | |
| Parameters | E/(GPa) | υ | C/(MPa) | ϕ/(°) | ρ/(kg/m−3) |
|---|---|---|---|---|---|
| Concrete lining | 23 | 0.2 | 2.5 | 45 | 2500 |
| Bolt | 206 | 0.3 | - | - | 7850 |
| Schemes | Bolt Length (m) | Bolt Spacing (m) |
|---|---|---|
| 1 | 4.0 | 1.0 |
| 2 | 4.0 | 0.5 |
| 3 | 5.0 | 1.0 |
| 4 | 5.0 | 0.5 |
| Schemes | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Maximum uplift (cm) | 11 | 10.06 | 8.01 | 7.69 |
| Maximum settlement (cm) | 10.5 | 9.86 | 7.21 | 6.41 |
| Model Parameters | LSTM Layers | Units | Dense | Batch_Size | Epoch | Activate Function | Optimizer | Loss |
|---|---|---|---|---|---|---|---|---|
| Number/Type | 2 | 32 | 1 | 100 | 200 | Relu | Adam | Mse |
| Data Set | MAE | RMSE | R2 |
|---|---|---|---|
| Train | 0.124 | 0.141 | 0.931 |
| Test | 0.201 | 0.188 | 0.922 |
| Data Set | MAE | RMSE | R2 |
|---|---|---|---|
| Train | 0.114 | 0.133 | 0.953 |
| Test | 0.197 | 0.202 | 0.901 |
| Data Set | MAE | RMSE | R2 |
|---|---|---|---|
| Train | 0.107 | 0.129 | 0.927 |
| Test | 0.215 | 0.221 | 0.908 |
| Data Set | MAE | RMSE | R2 |
|---|---|---|---|
| Train | 0.121 | 0.146 | 0.926 |
| Test | 0.213 | 0.193 | 0.917 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, K.; Chen, L.-P.; Fang, Q.; Hong, X.-F. Machine Learning in Conventional Tunnel Deformation in High In Situ Stress Regions. Symmetry 2022, 14, 513. https://doi.org/10.3390/sym14030513
Ma K, Chen L-P, Fang Q, Hong X-F. Machine Learning in Conventional Tunnel Deformation in High In Situ Stress Regions. Symmetry. 2022; 14(3):513. https://doi.org/10.3390/sym14030513
Chicago/Turabian StyleMa, Ke, Li-Ping Chen, Qian Fang, and Xue-Fei Hong. 2022. "Machine Learning in Conventional Tunnel Deformation in High In Situ Stress Regions" Symmetry 14, no. 3: 513. https://doi.org/10.3390/sym14030513