
Analysis of Rheological Factors of Soft Rock Tunnel Based on Constitutive Model of Rock Parameters Attenuation with Equivalent Effect
Abstract
:1. Introduction
2. Burgers Creep Damage Model
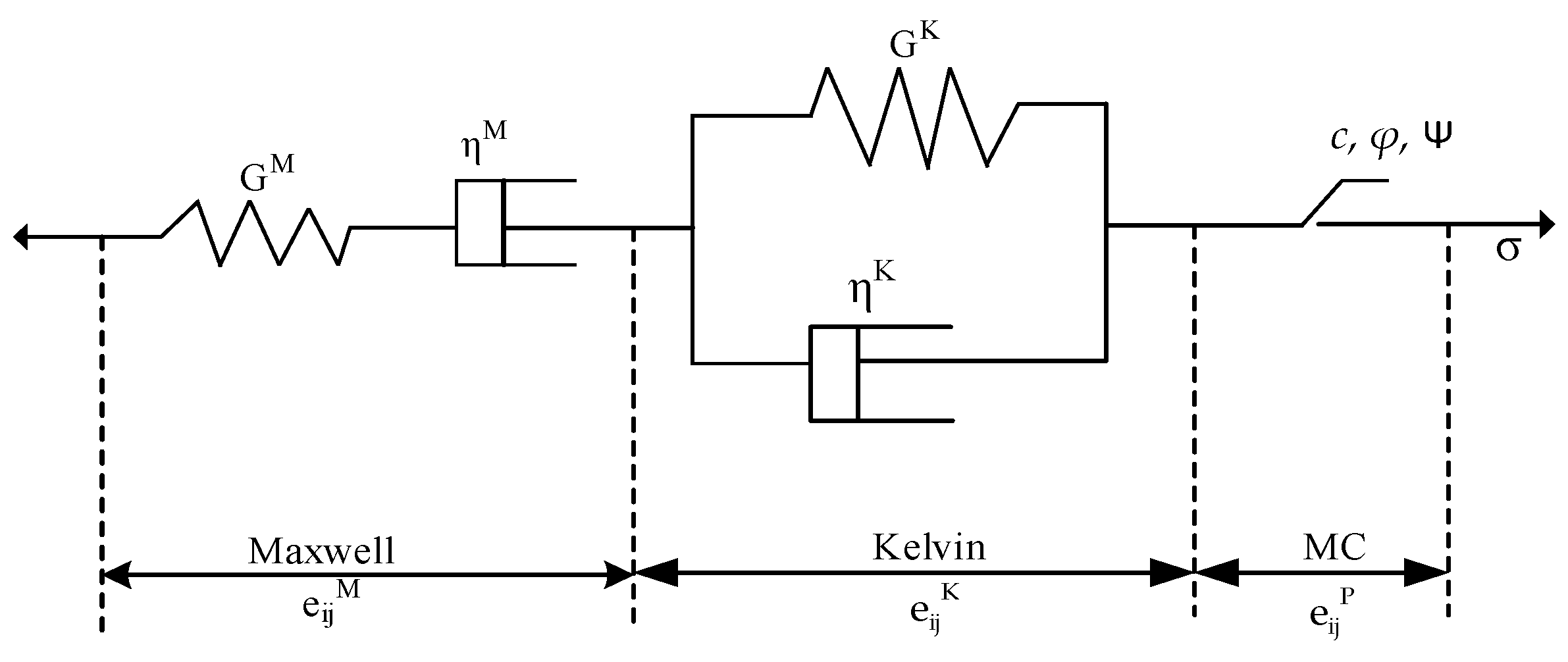
2.1. Burgers Viscoelastic Plastic Model
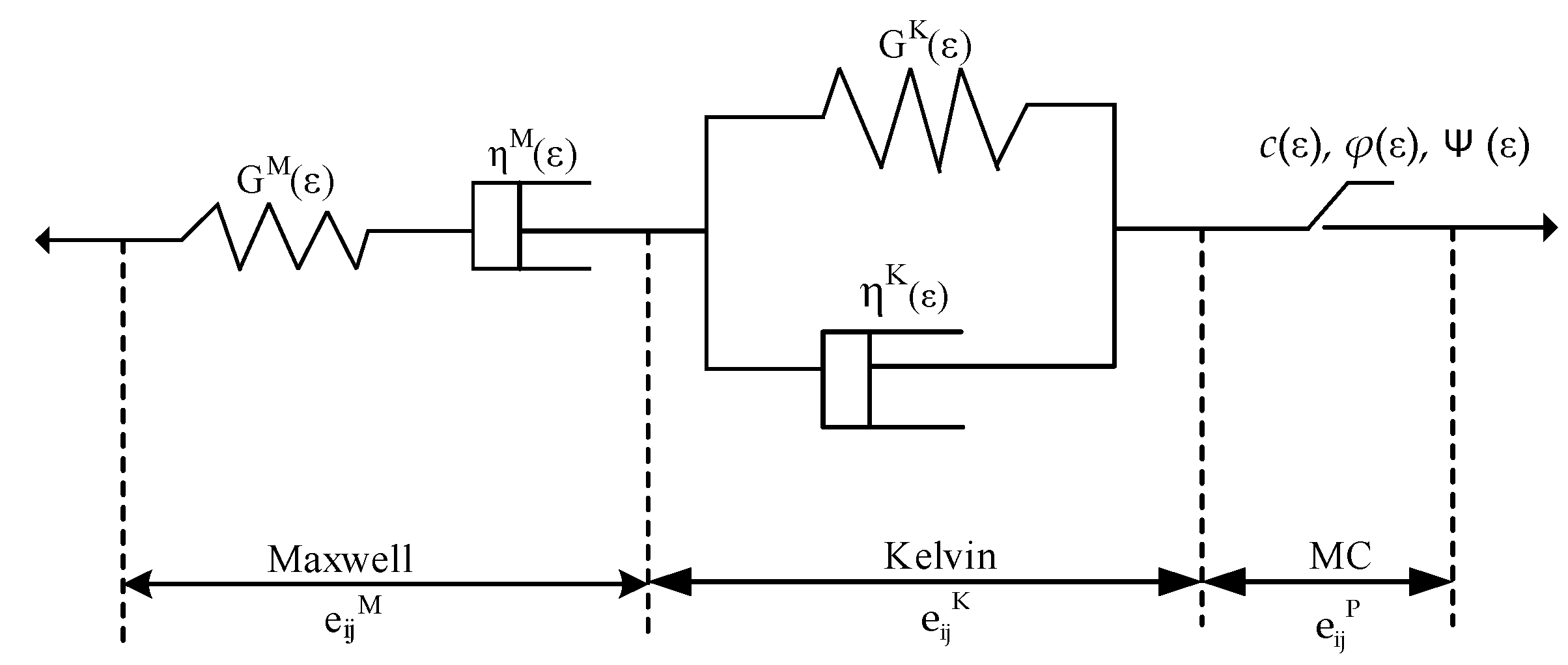
2.2. Improved Burgers Creep Loss Model
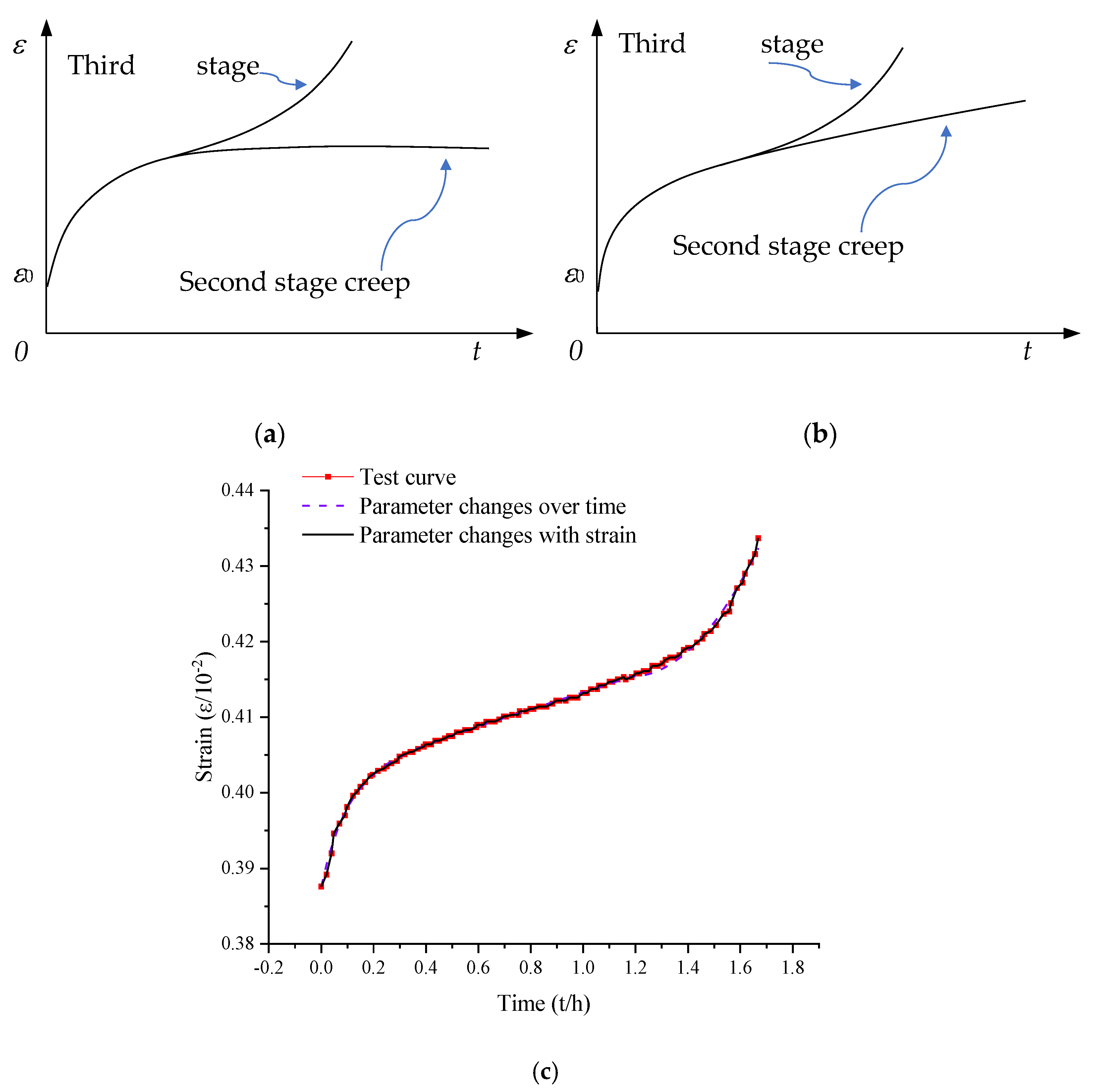
2.3. Example of Improved Model
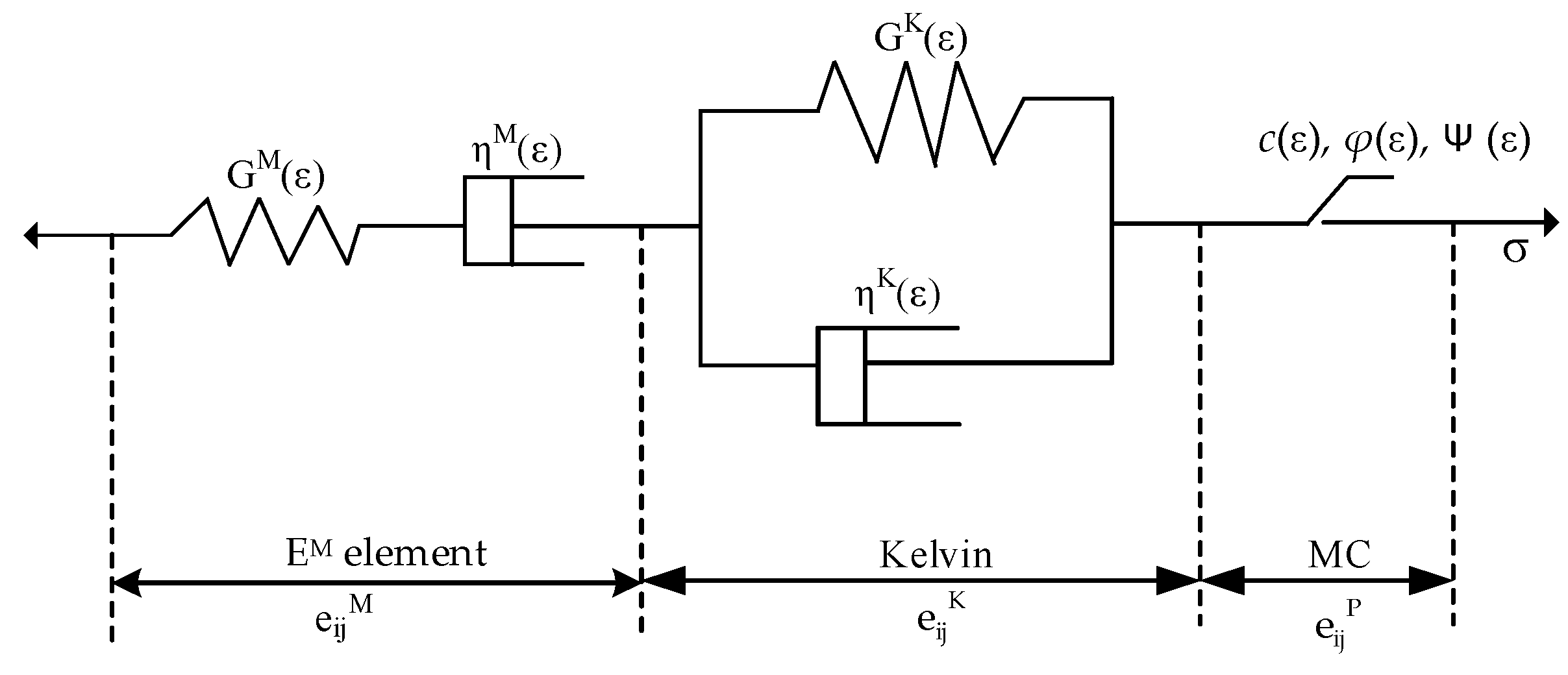
2.4. Improved H-K Model
3. Numerical Model
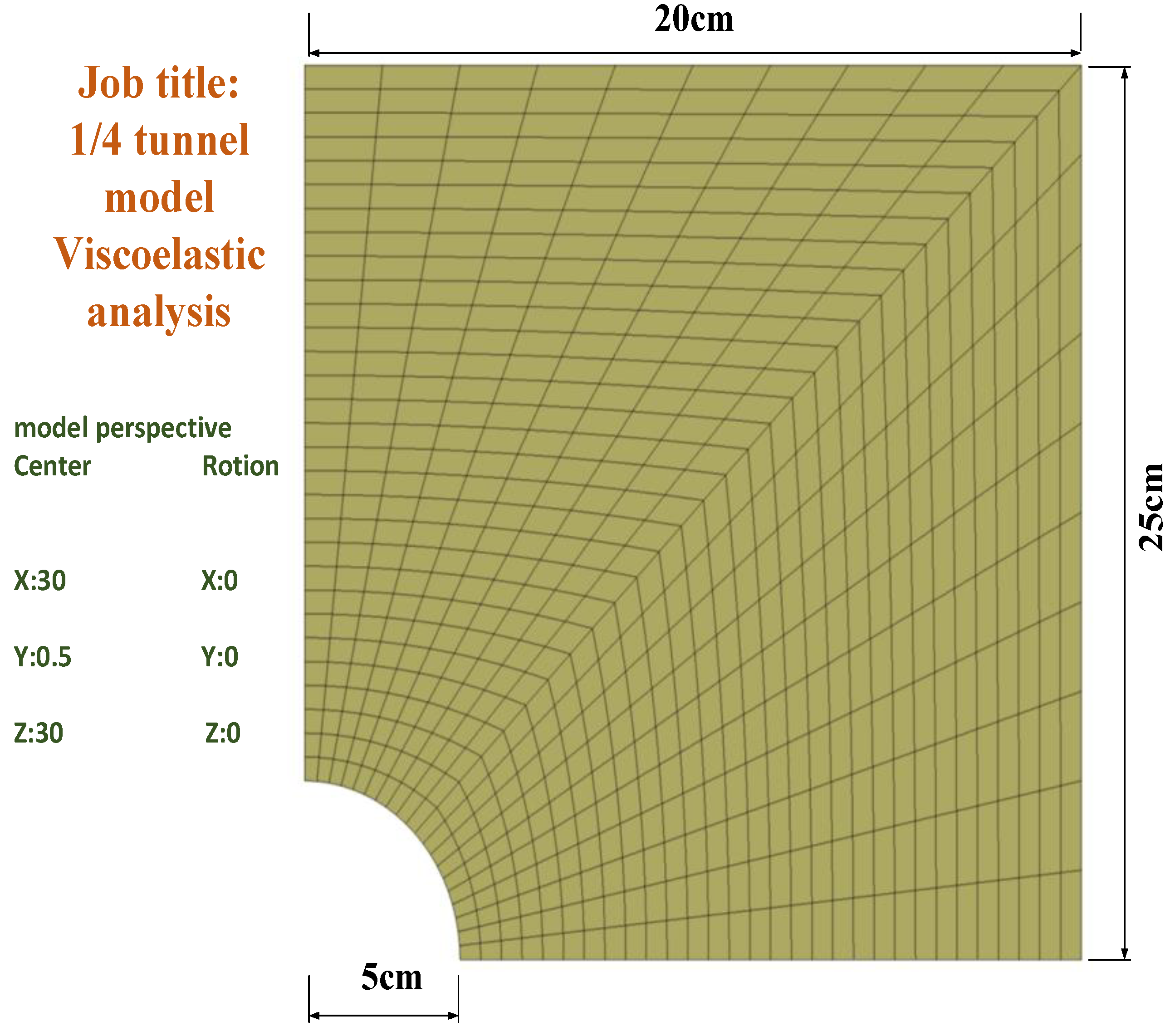
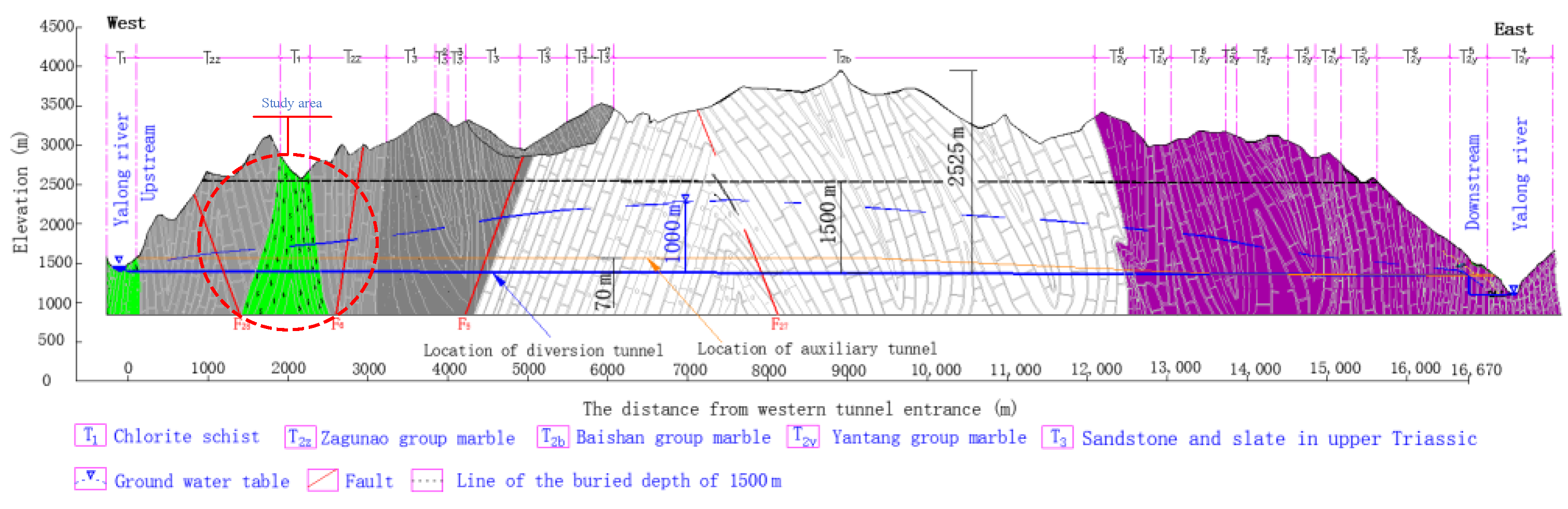
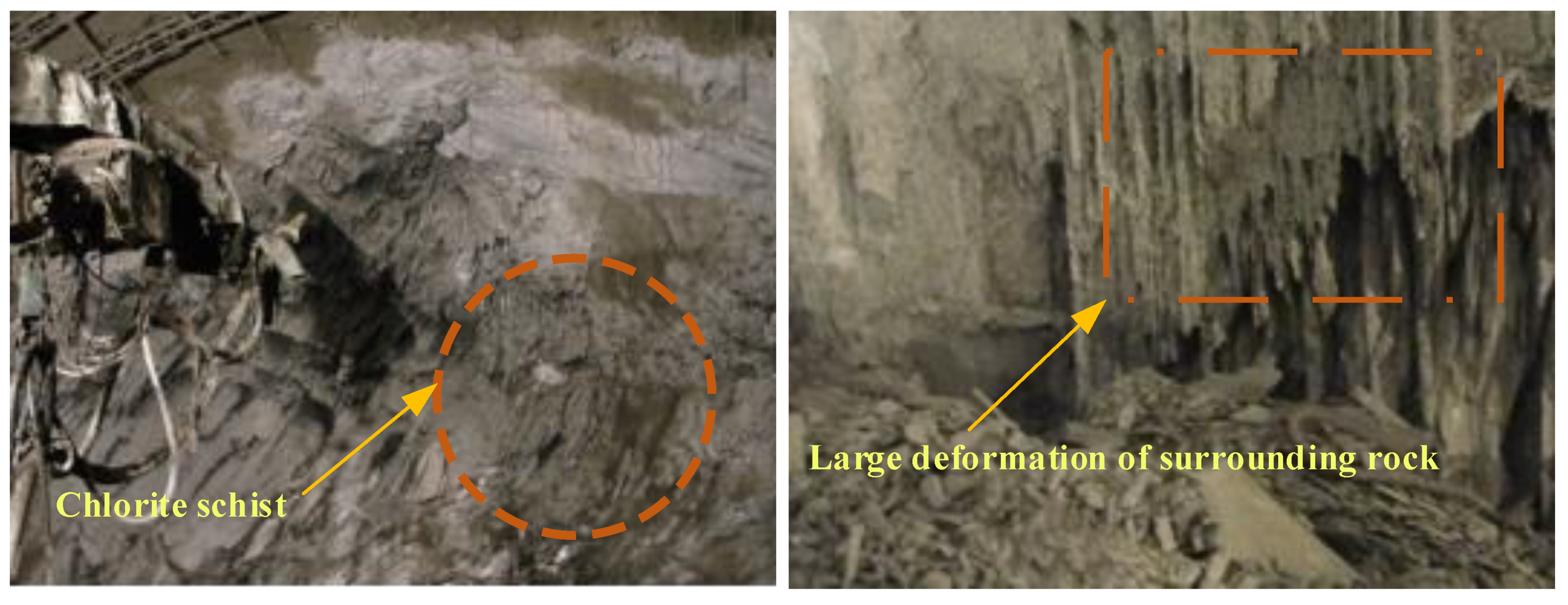
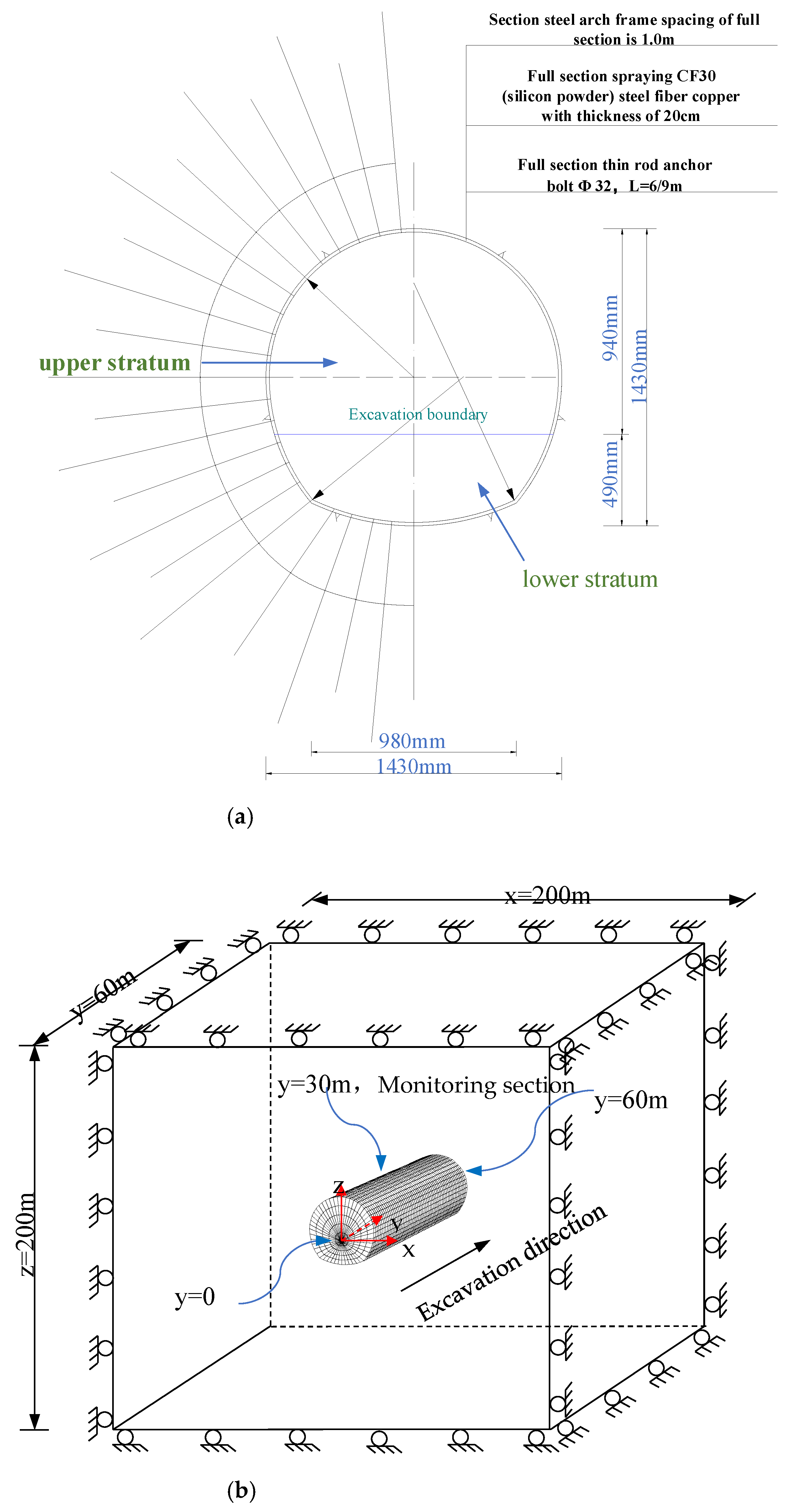
3.1. Project Overview
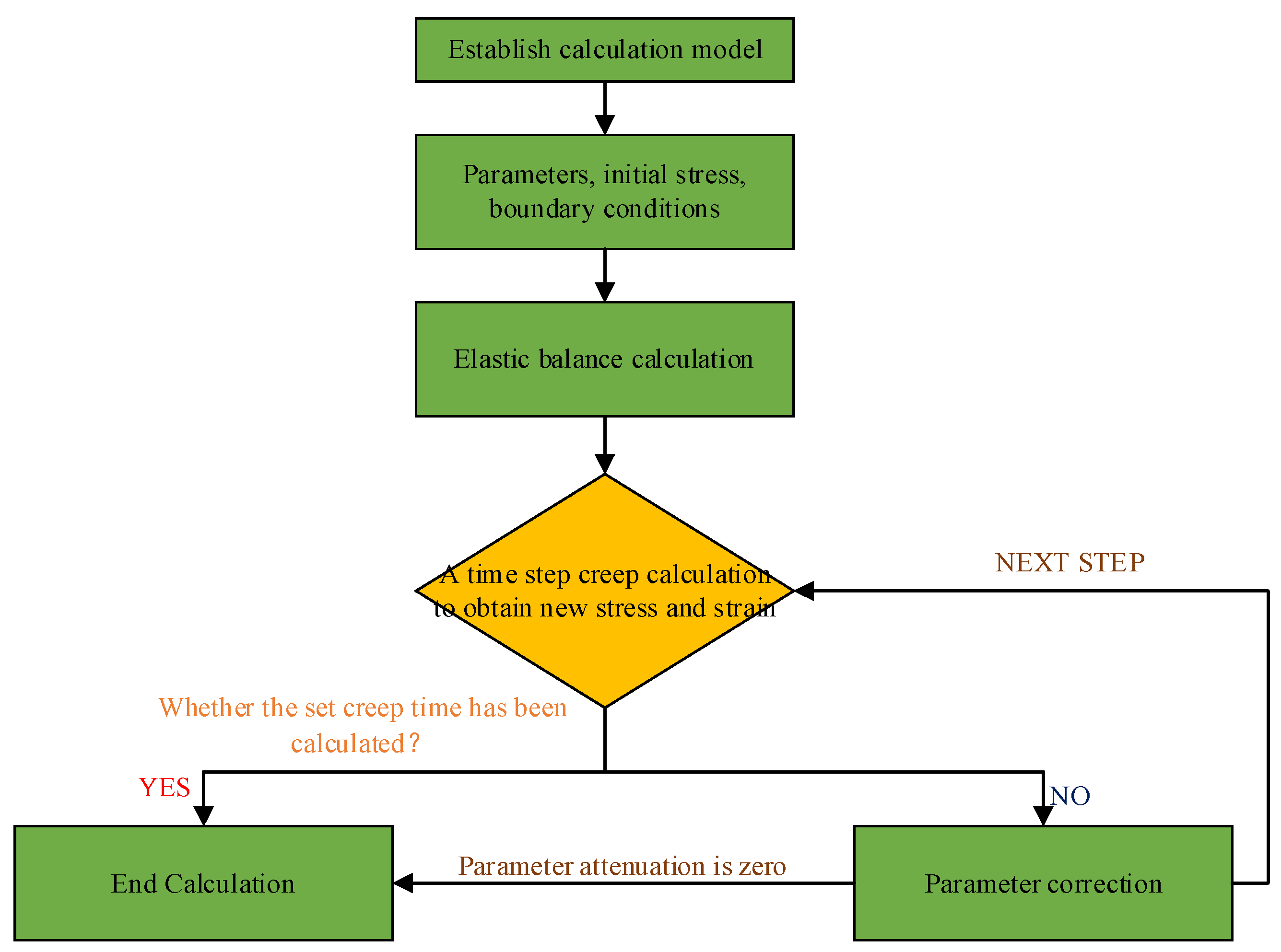
3.2. Selection and Realization of Constitutive Model for Soft Rock Tunnel
3.3. Establishment of 3D Grid
3.4. Model Parameters
4. Research on Rheological Factors of Soft Rock Tunnel
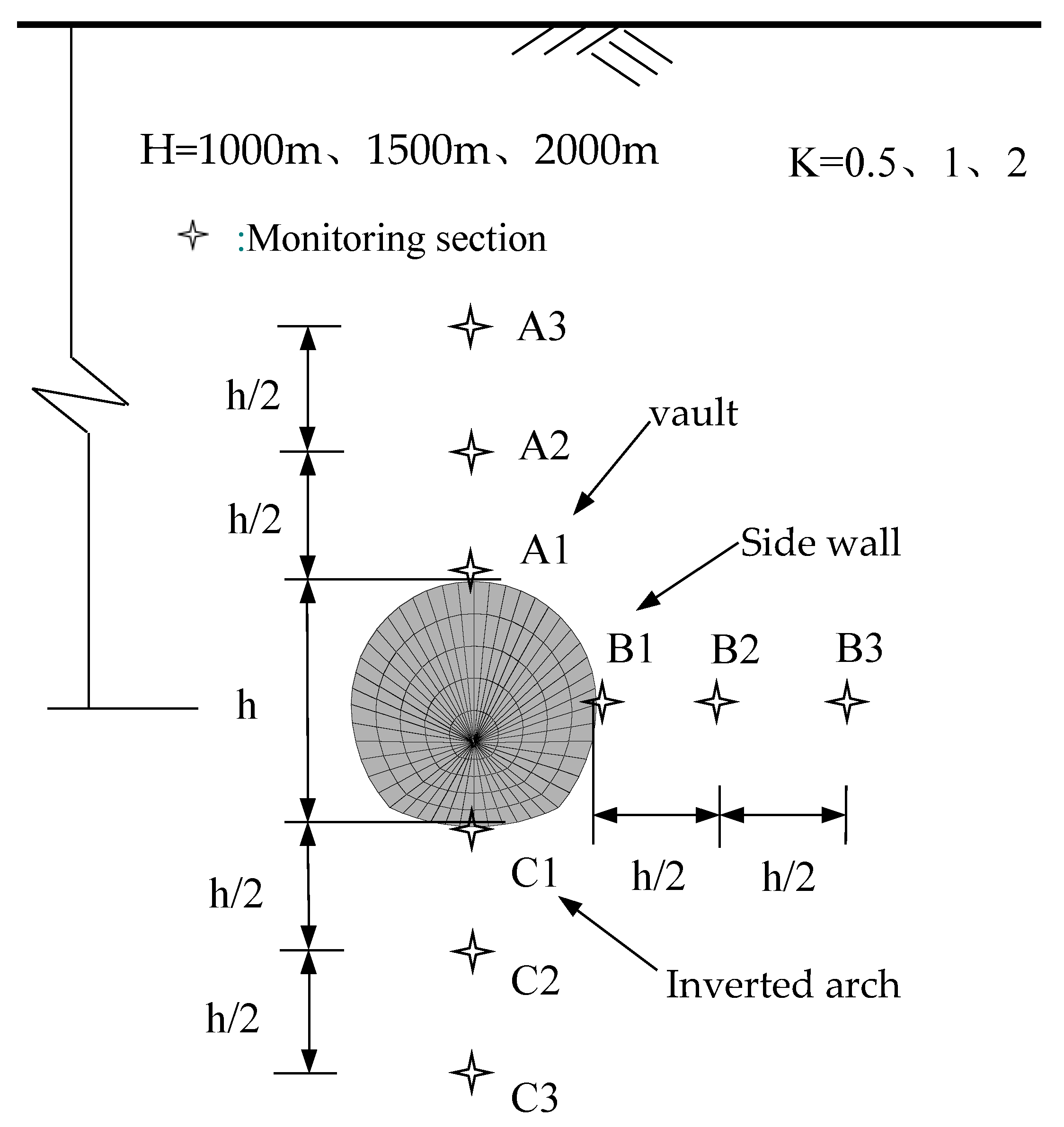
4.1. Influence of Buried Depth and Lateral Pressure Coefficient on Tunnel Rheology
4.1.1. Impact of Different Burial Depth (K = 1)
4.1.2. Effect of Different Side Pressure Coefficients (H = 1500 m)
4.1.3. Deformation Characteristics of Surrounding Rock in Radial Direction of Tunnel (H = 1500 m, K = 1)
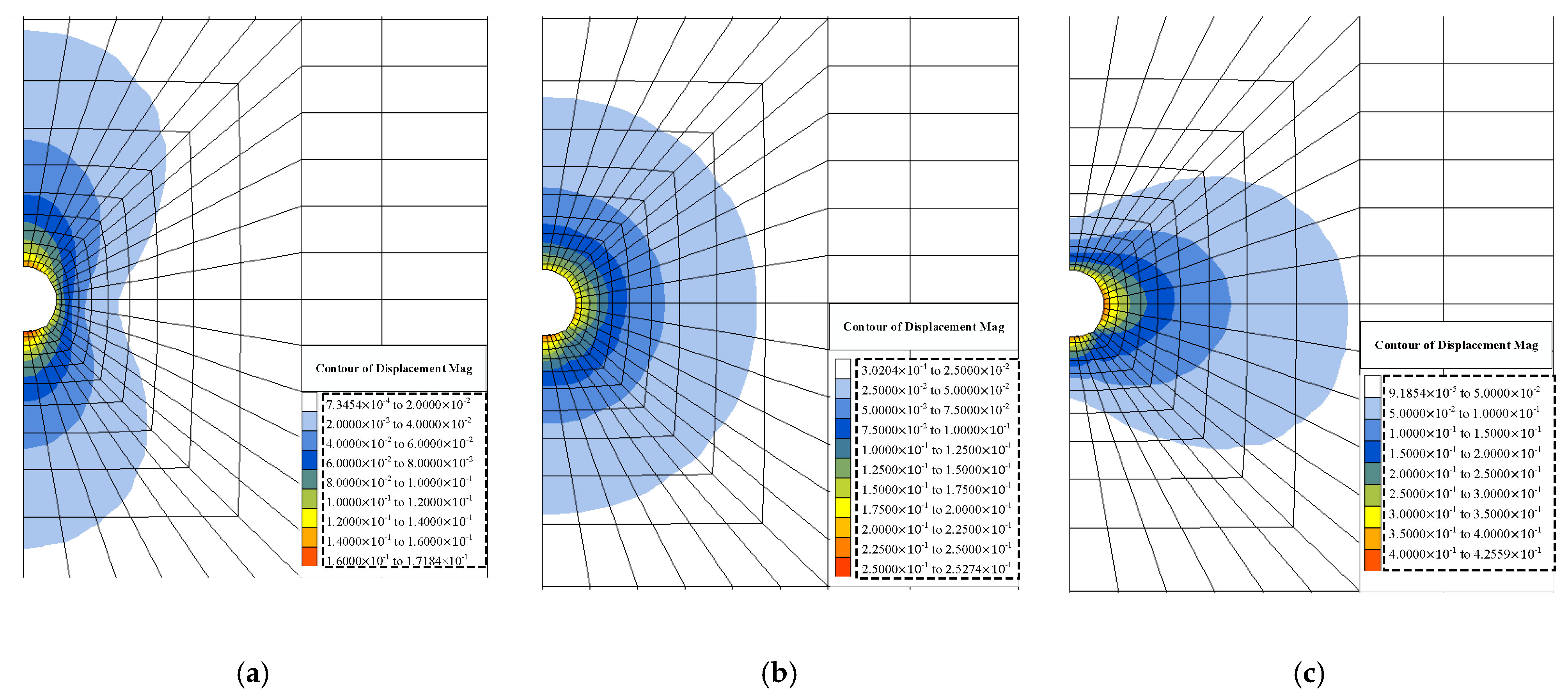
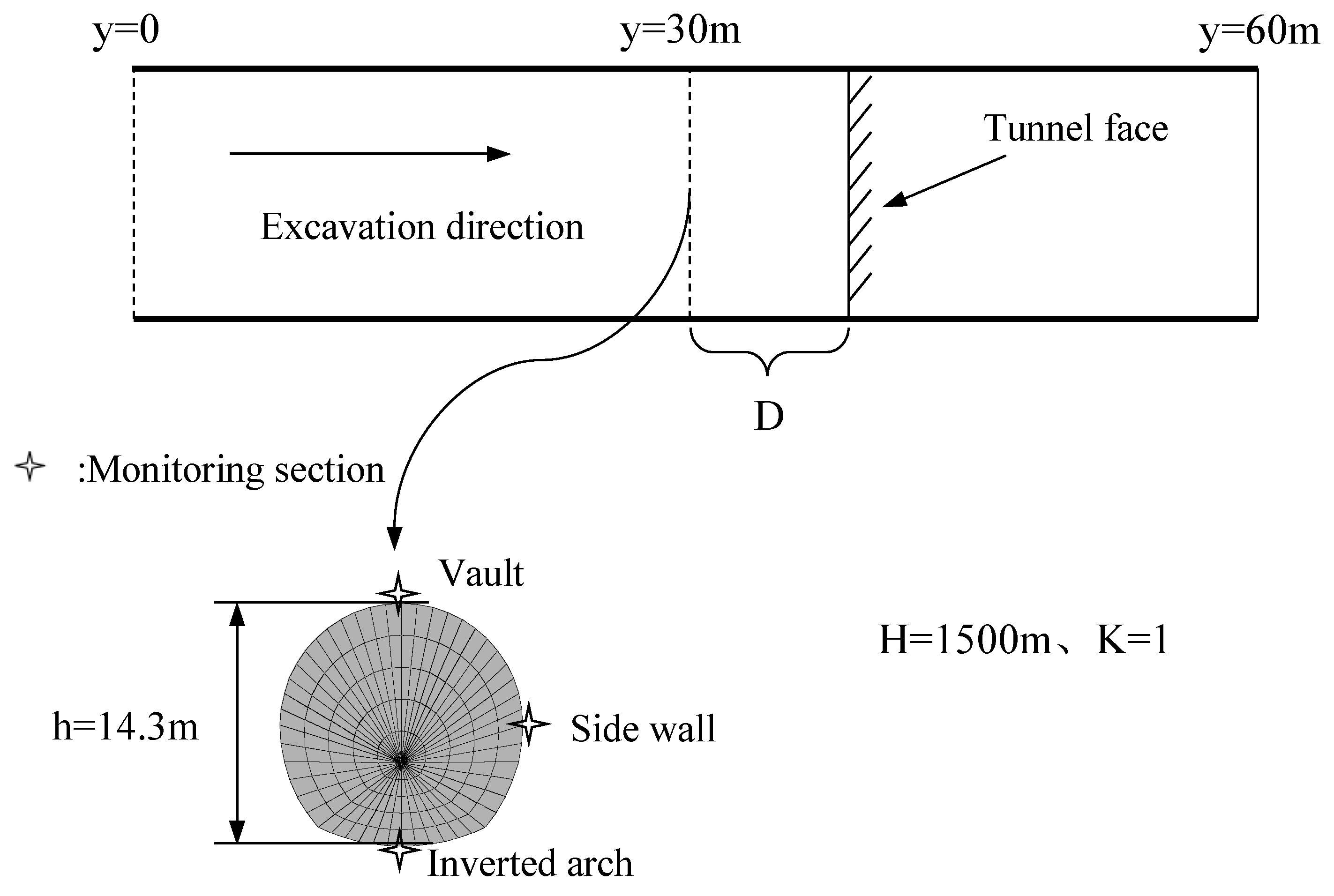
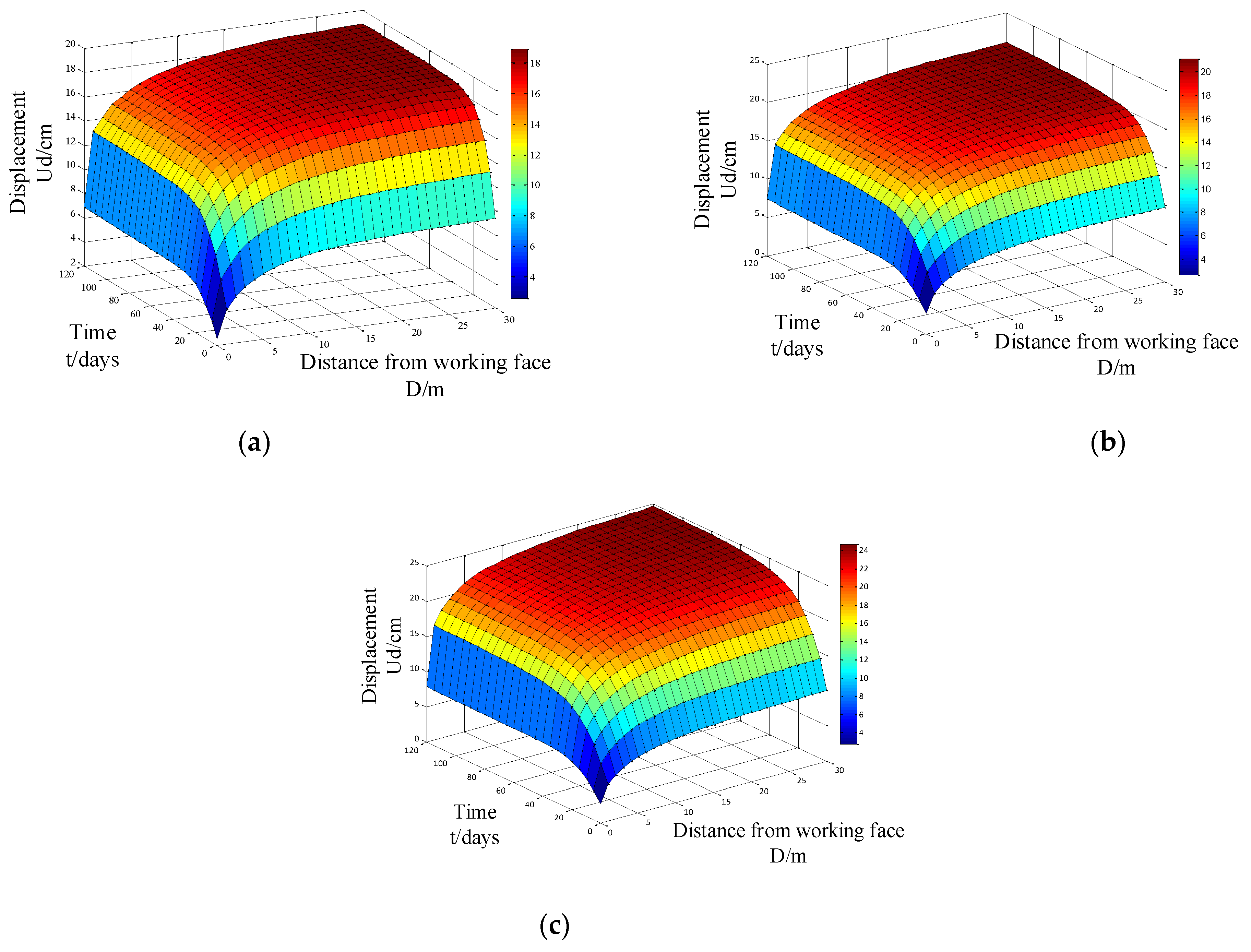
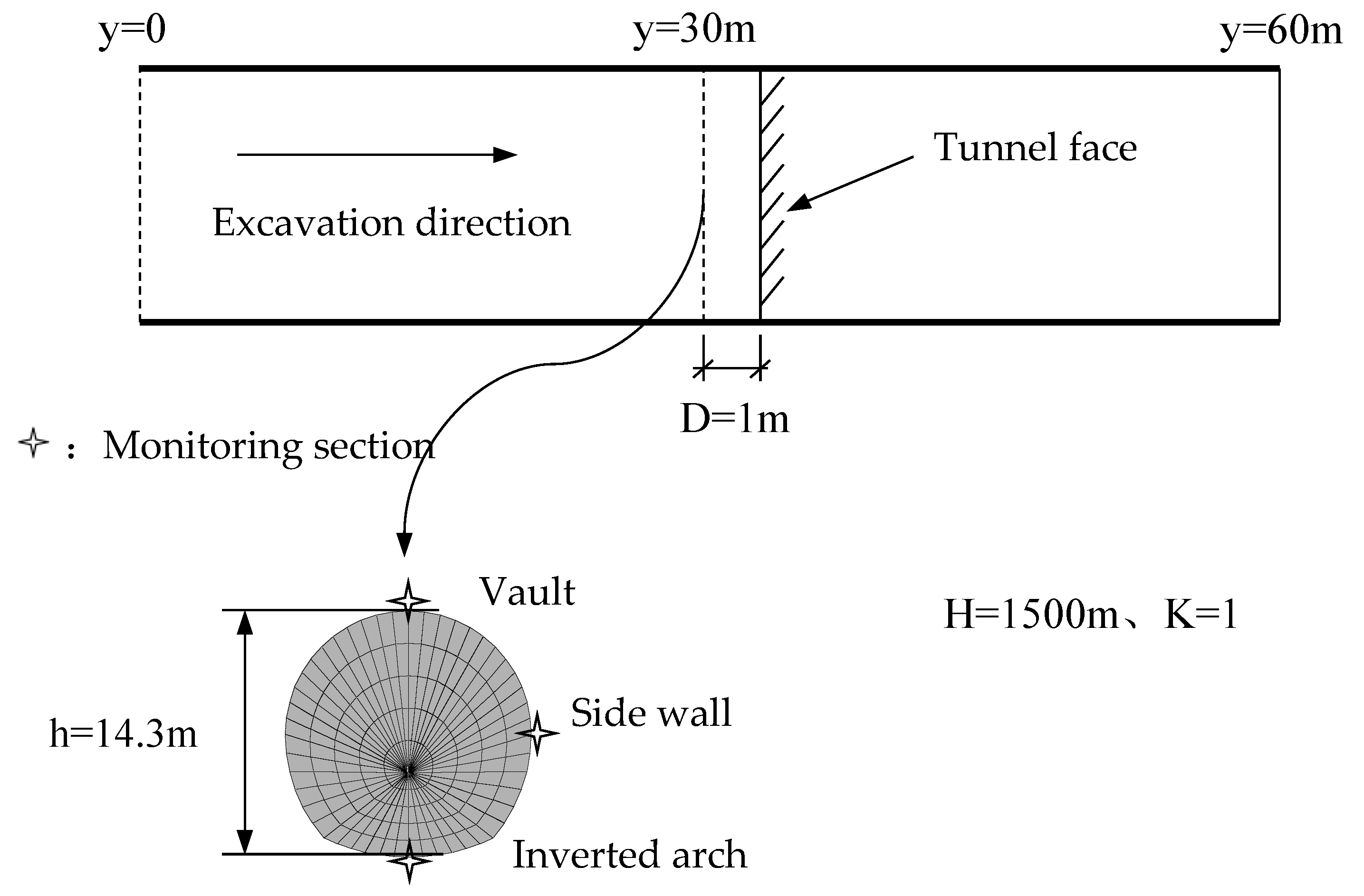
4.2. Influence of the Face on Rheology
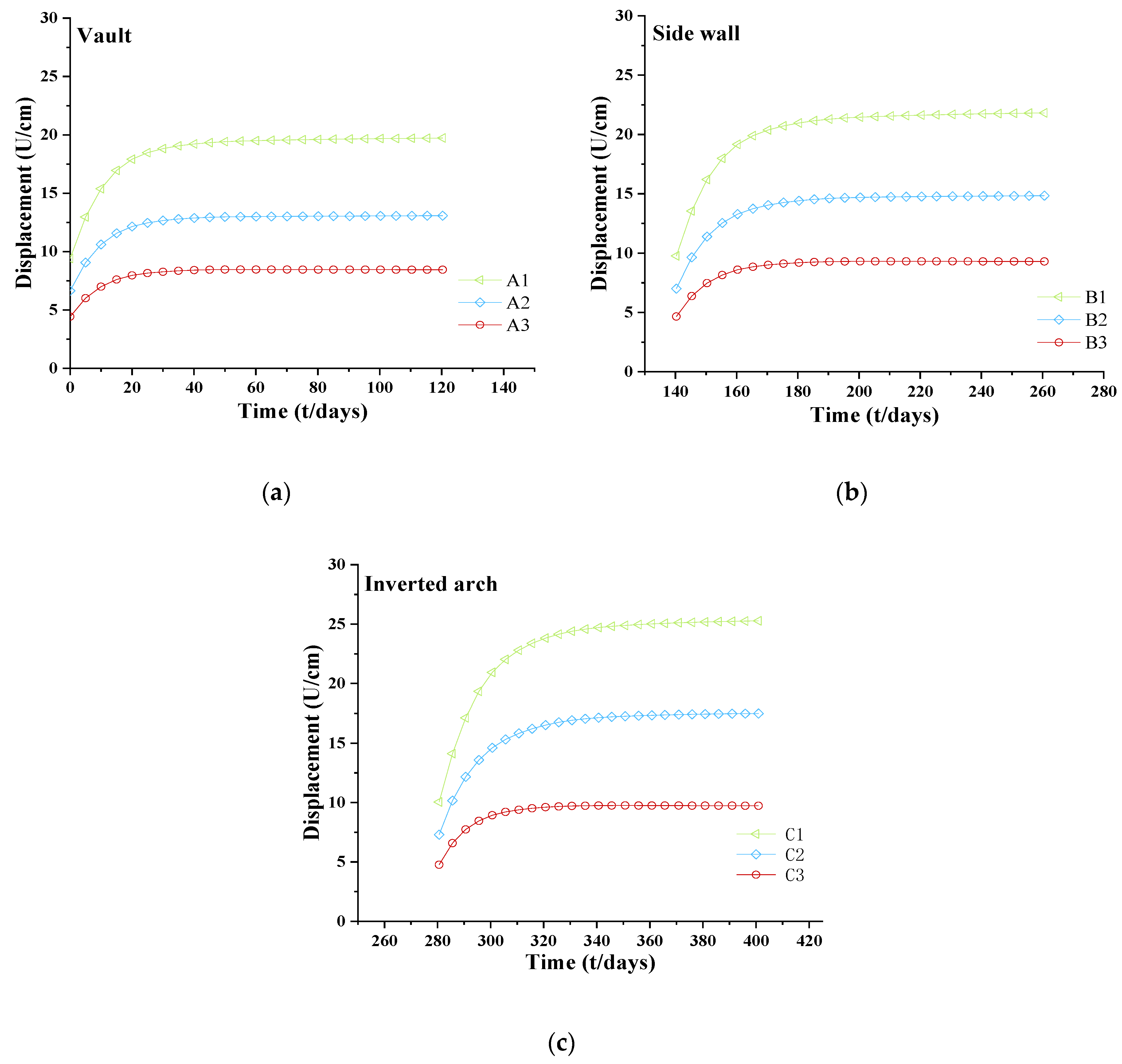
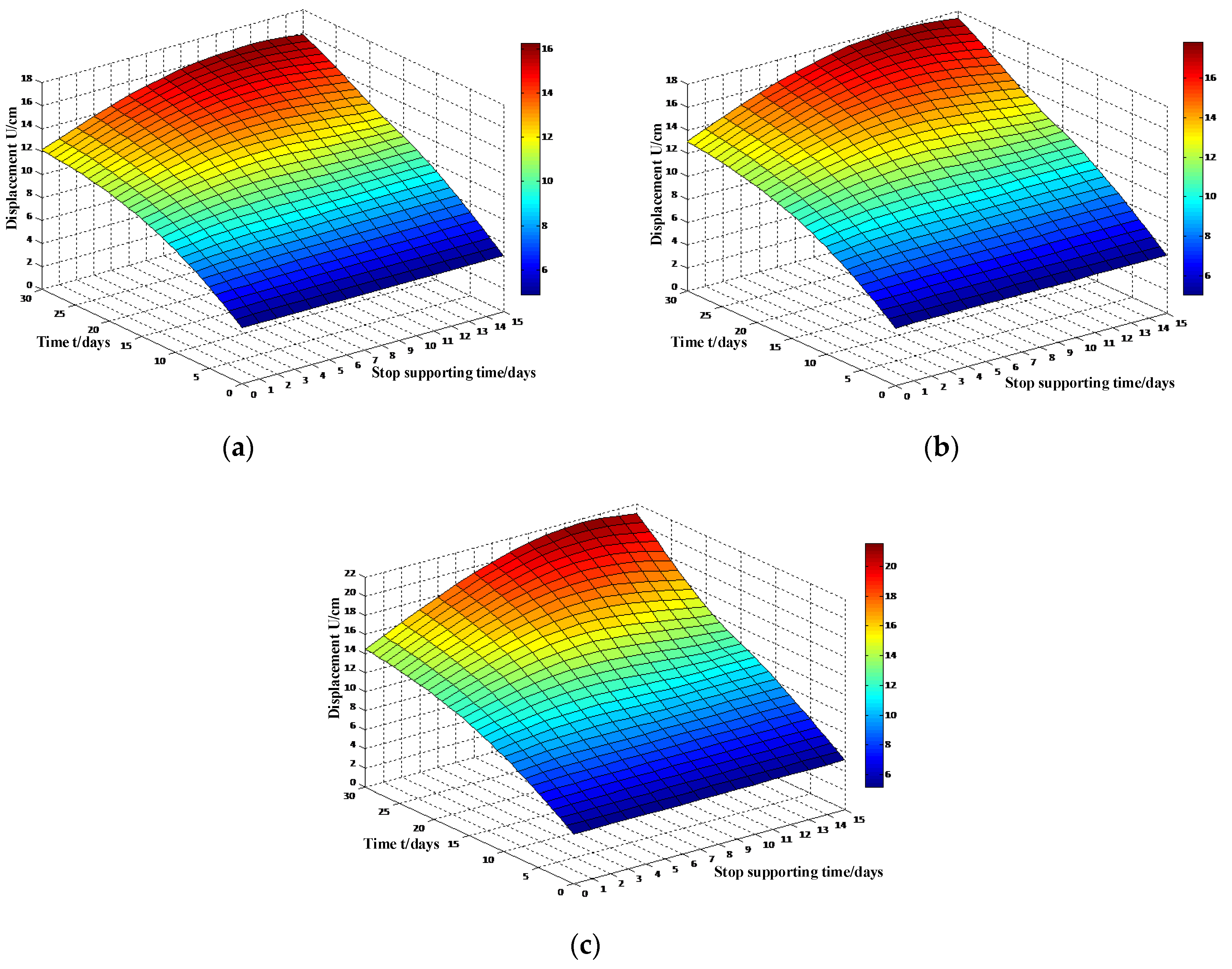
4.3. Effect of Support Stop Time on Rheology
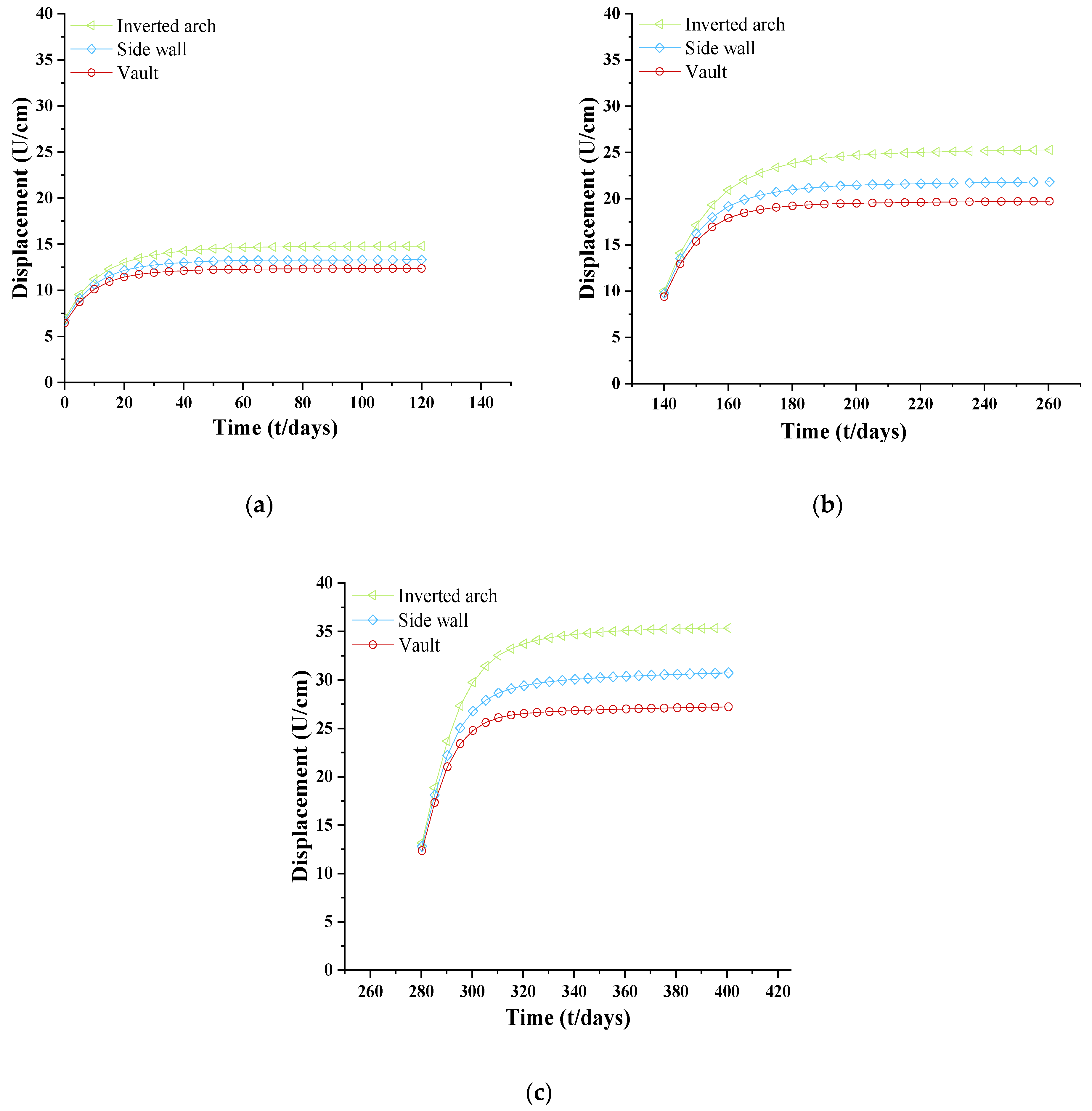
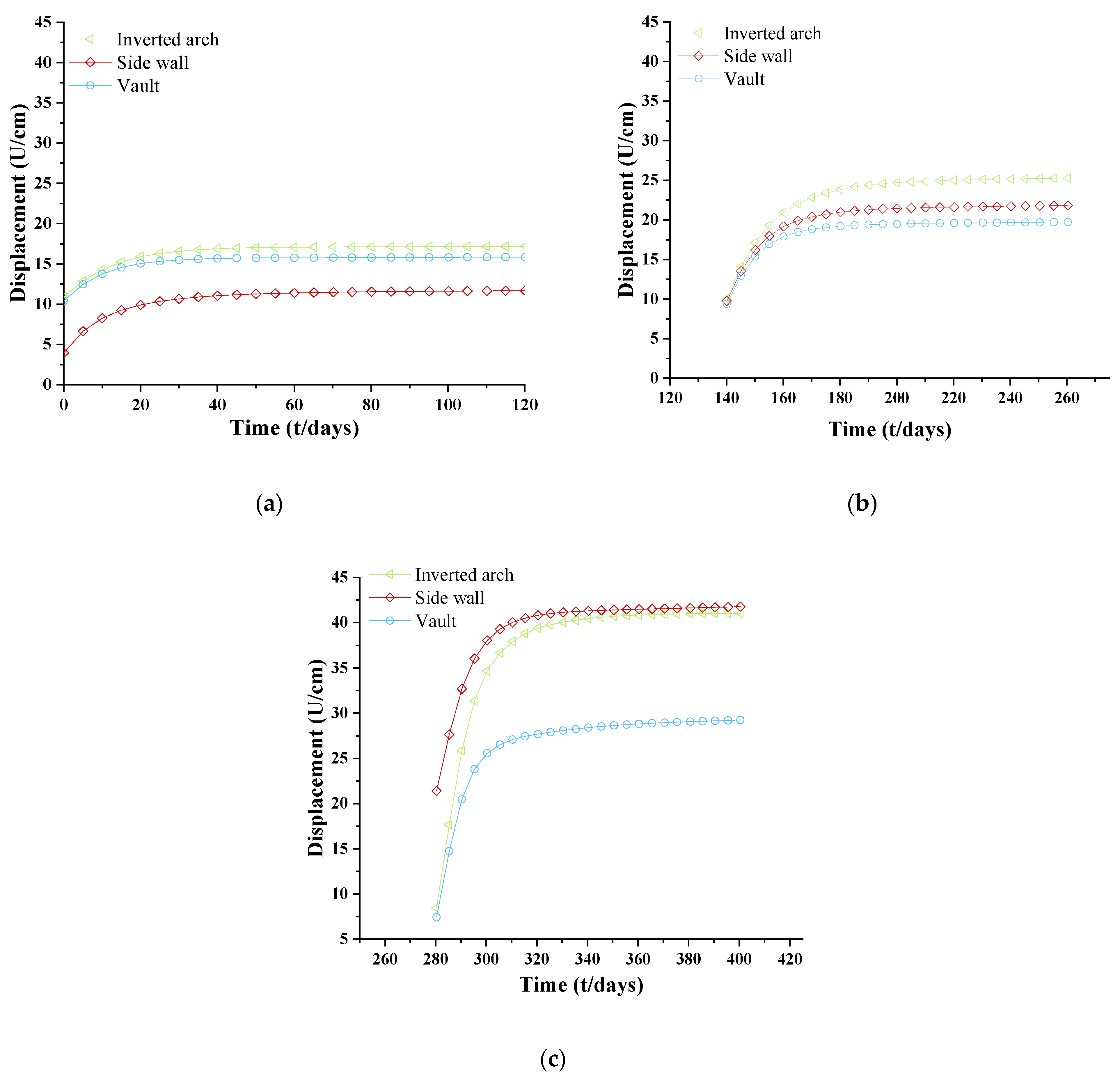
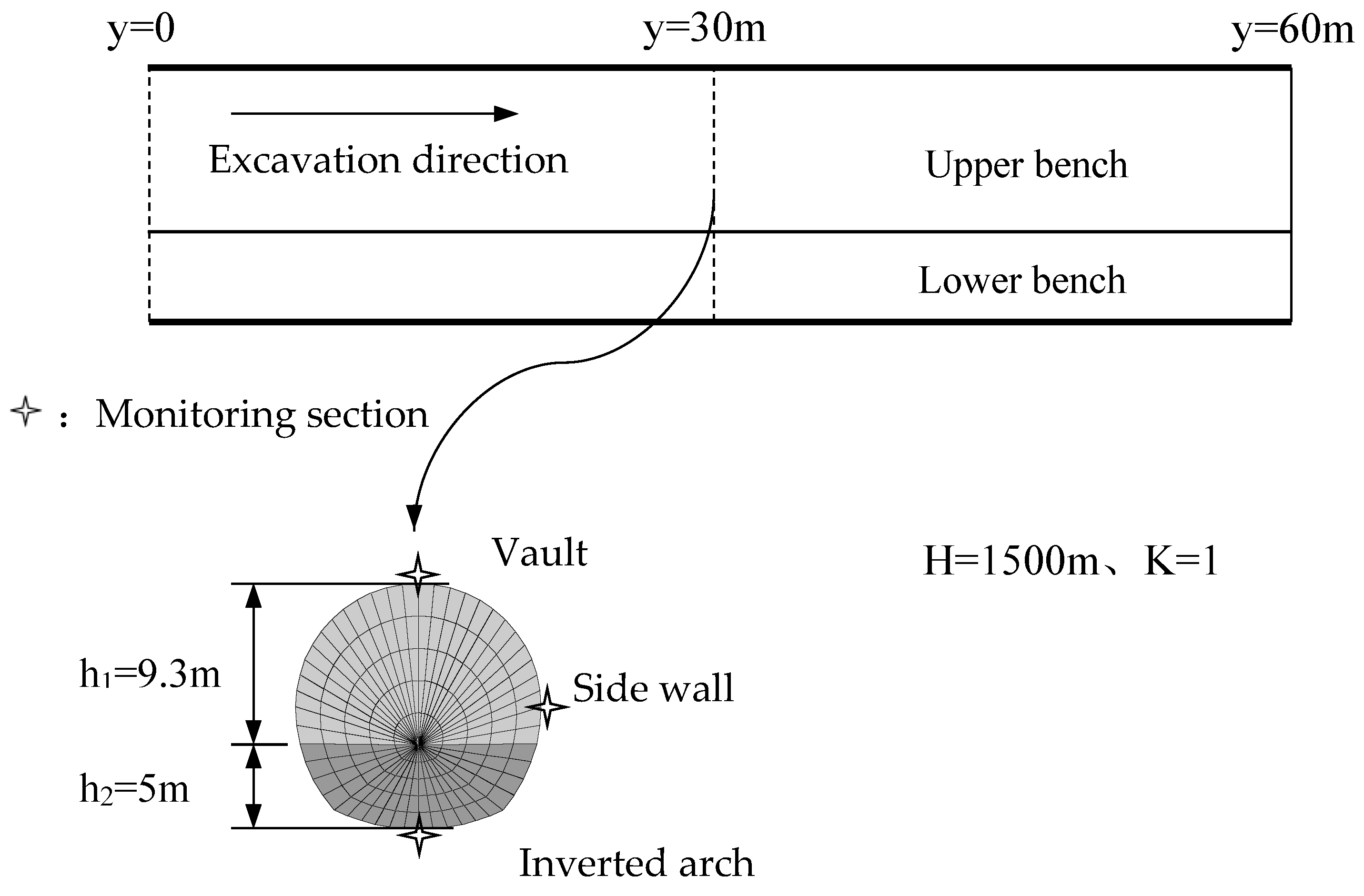
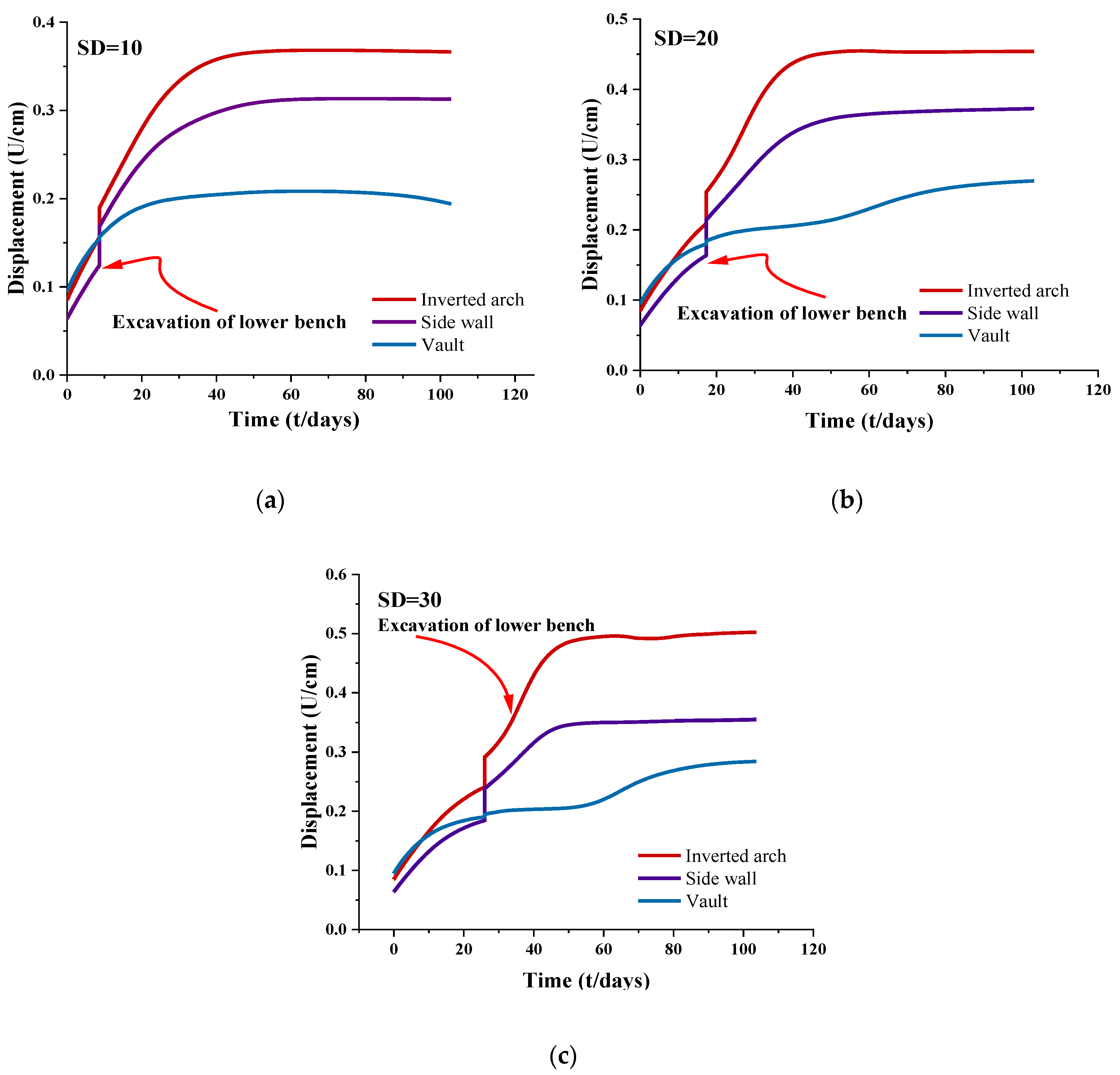
4.4. Impact of Bench Excavation on Rheology
5. Conclusions
- (1)
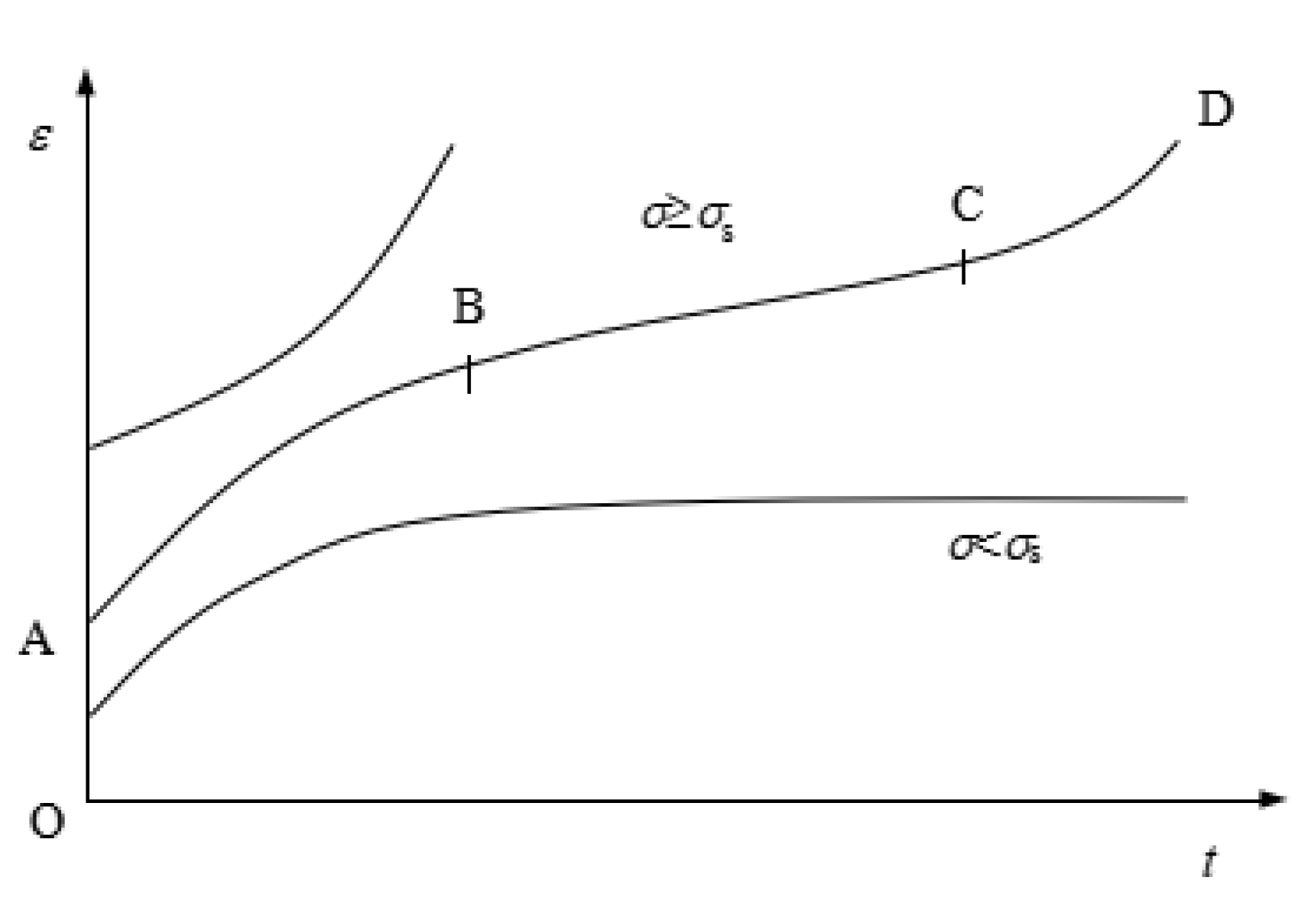
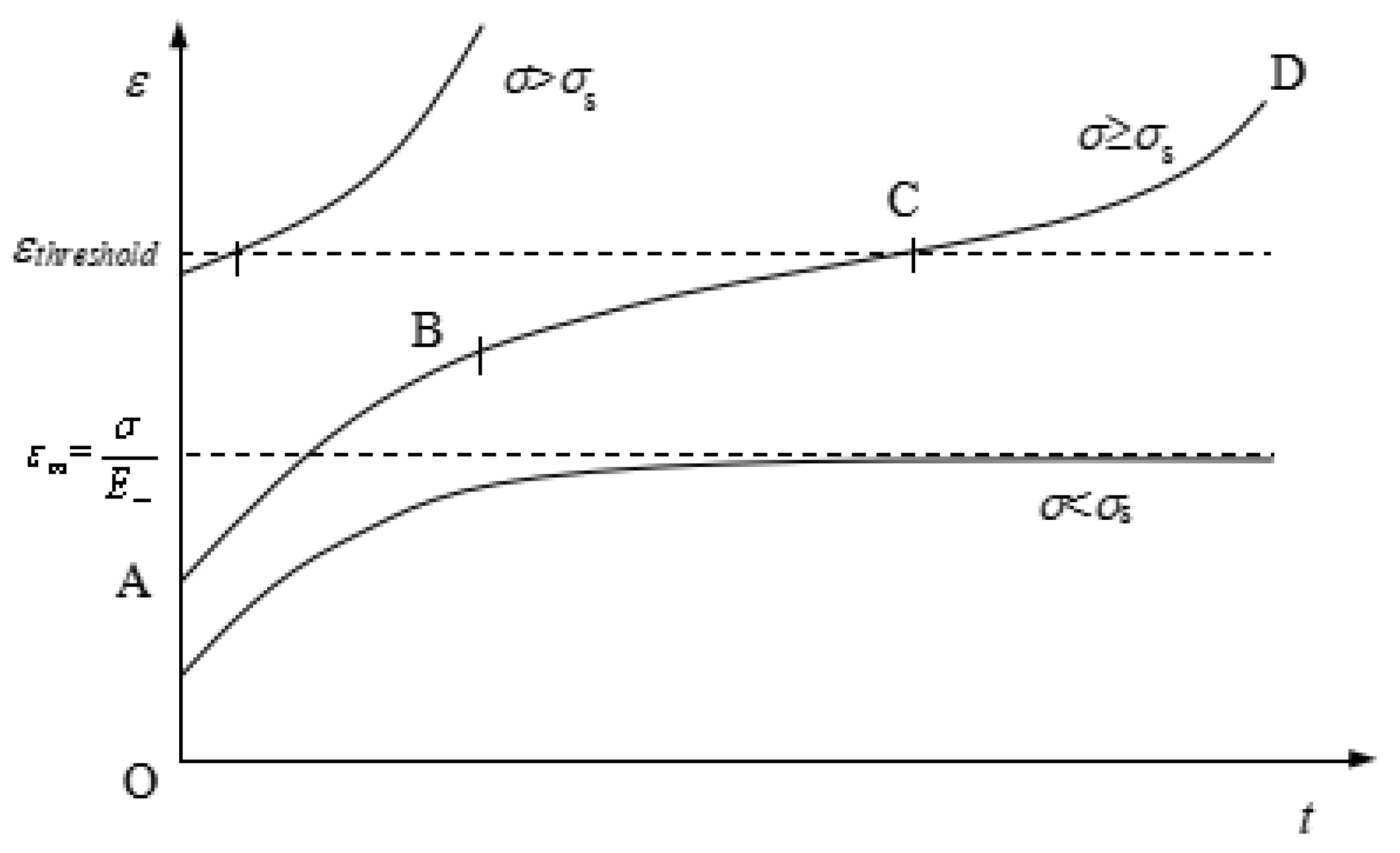
- According to the characteristics of the three stages of rock creep, the improved three-parameter H-K (generalized Kelvin viscoelastic model) can reflect the elastic deformation and creep deformation under different stress levels; when the stress level is less than the long-term strength (σ < σs), the growth rate of strain gradually decreases to zero. When t→∞ is less than the long-term strength, the strain will tend to a fixed value, and only the first stage (deceleration) and the second stage (stability) of creep will occur; when the stress level is greater than or equal to the long-term strength (σ ≥ σs), the strain will increase infinitely with time, will not converge to a fixed value, the material will yield and fail, and the creep will enter the third stage (acceleration);
- (2)
- When the lateral pressure coefficient K = 1, the greater the burial depth, the longer the time it takes for the tunnel creep deformation to become stable, and the creep displacement around the tunnel also increases; when the buried depth H = 1500 m, the greater the horizontal geostress is, the stronger the creep deformation is, and the inverted arch is the location of the maximum creep deformation; when the buried depth H = 1500 m and the lateral pressure coefficient K = 1, the displacement amplitude of surrounding rock decreases with the increase of radial distance, and the displacement difference becomes smaller when the deformation is stable. Therefore, in the actual tunnel project, when the local horizontal ground stress is relatively large, the prestressed anchor cable can be added on the section with large local deformation of the upper step, which plays a role in restraining the deformation;
- (3)
- After the excavation of the tunnel is stopped, the earlier the support is, the smaller the later creep deformation is; the longer the support is stopped, although the calculated creep time after setting the support is relatively short, and the greater the creep deformation is generated in the later period. The influence of the number of days to stop (support) on the rheology of the tunnel is mainly reflected in the later creep deformation;
- (4)
- The farther away from the palm, the greater the release of instantaneous elastic deformation, and the larger creep displacement will occur at the later stage. When it is close to the palm face, due to the influence of the support of the palm face (similar to providing virtual support), the elastic displacement of the monitoring point is small, and the creep deformation is relatively flat at the later stage, and the displacement is small at creep stability.
- (5)
- After excavation and support of the upper step, the longer the stagnation time, the more disadvantageous the rheological deformation of the tunnel, especially the position of the inverted arch, and the larger the displacement increase in the later creep process. After excavation of the lower step, instantaneous elastic deformation occurs, and the displacement of the inverted arch and side wall increases sharply, while the vault only produces small elastic deformation. After the lower step support, the creep deformation around the tunnel increases to a certain extent due to the influence of stagnation time, and the inverted arch displacement is the largest. According to the actual construction on site, anchor bar piles can be applied at the upper step arch angle to prevent large area uplift of the bottom of the arch after excavation of the lower step and provide support for the systematic support of the upper step. In the later creep process, anchor bar piles can restrain the deformation of surrounding rock around the tunnel to a certain extent. It is more advantageous to excavate the lower step when anchor bar piles are applied.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, J. Rock rheological mechanics and its advance in engineering applications. Chin. J. Rock Mech. Eng. 2007, 26, 1081–1106. [Google Scholar]
- Xu, W.Y.; Yang, S.Q. Reply to “Discussion on ‘Nonlinear visco elastoplastic rheological model (Hohal model) of rock and its engineering appli-cation’”. Chin. J. Rock Mech. Eng. 2007, 641–646. [Google Scholar]
- Lv, A.Z. Some situation and progress in rock mechanics study in China. Rock Soil Mech. 2004, 25, 1–9. [Google Scholar] [CrossRef]
- Yang, G.S. On the present state and development of rock mechanics in China. J. Xian Min. Inst. 1999, 19, 5–11. [Google Scholar] [CrossRef]
- Yang, G.S.; Sun, J. On the Present State and Development of Rock Mechanics in China. J. Xian Highw. Univ. 2001, 21, 5–9. [Google Scholar] [CrossRef]
- Fan, Q.Z.; Wang, S.H.; Gao, Y.F. Progress in studies on the rheological test and model identification of rock. J. Shandong Agric. Univ. 2006, 37, 136–140. [Google Scholar]
- Cheng, X.F.; Zhuang, D.Y. A Finite-Strain Viscoelastic-Damage Numerical Model for Time-Dependent Failure and Instability of Rocks. Comput. Geotech. 2022, 143, 104596. [Google Scholar] [CrossRef]
- Hamiel, Y.; Lyakhovsky, V.; Agnon, A. Poroelastic Damage Rheology: Dilation, Compaction, and Failure of Rocks: Poroelastic Damage Rheology. Geochem. Geophys. Geosyst. 2005, 6, 9. [Google Scholar] [CrossRef]
- Chen, G.Q.; Tang, H.M.; Hu, K.Y.; Li, C.D. Evolution characteristics and early warning of landslides based on heterogeneous rheological properties. Chin. J. Rock Mech. Eng. 2022, 41, 1795–1809. [Google Scholar] [CrossRef]
- Wei, Z.; Wang, Y.; Weng, W.; Zhou, Z.; Li, Z. Research on Tunnel Construction Monitoring Method Based on 3D Laser Scanning Technology. Symmetry 2022, 14, 2065. [Google Scholar] [CrossRef]
- Long, W.; Chen, W.; Huang, C.; Li, D.; Su, D. Study on Transverse Deformation Characteristics of a Shield Tunnel under Earth Pressure by Refined Finite Element Analyses. Symmetry 2022, 14, 2030. [Google Scholar] [CrossRef]
- Jin, L.; Xia, C.C. Study Methods for creep damage in theoretical rheological models and some problems. Chin. J. Rock Mech. Eng. 2012, 31, 3006–3014. [Google Scholar]
- Xia, C.C.; Xu, C.B.; Wang, H.N.; Zhang, C.S. Method for parameters determination with unified rheological mechanical model. Chin. J. Rock Mech. Eng. 2009, 28, 425–432. [Google Scholar]
- Yang, C.; Xu, X. Relationship between creep characteristics of intact rock and single-flawed sandstone under different critical stress intervals. Chin. J. Rock Mech. Eng. 2022, 41, 1347–1357. [Google Scholar] [CrossRef]
- Yang, W.D.; Zhang, Q.Y.; Chen, F.; Li, S.C.; Li, W.G.; Wang, J.H.; He, R.P.; Zeng, J.Q. Rheological parameters inversion by theoretical analysis of compressive creep tests. Chin. J. Rock Mech. Eng. 2012, 44, 638–642. [Google Scholar]
- Fang, H.C.; Zhang, D.L.; Wen, M.; Hu, X.Y. A non-iterative analytical method for mechanical analysis of surrounding rock with arbitrary shape holes. Chin. J. Rock Mech. Eng. 2020, 39, 2204–2212. [Google Scholar] [CrossRef]
- Huang, H.F.; Ju, N.P.; Zhou, X.; Zhang, C.Q.; Xie, M.L. Creep Properties of Schist Based on Improved Burgers Model. Water Resour. Power 2017, 35, 119–122. [Google Scholar]
- Yang, S.Q.; Xu, P. A new nonlinear rheological damage model for rock. Chin. J. Geotech. Eng. 2014, 36, 1846–1854. [Google Scholar]
- Cao, P.; Liu, Y.K.; Pu, C.Z.; Chen, R.; Wang, Y.X. An improved accelerated creep mechanical model of viscoelasto-plastic rock. J. Cent. South Univ. (Sci. Technol.) 2011, 42, 142–146. [Google Scholar]
- Liu, W. Modified Non-Stationary Bingham Creep Model of Rock and Its Parameter Identification. Chin. Q. Mech. 2022, 43, 651–658. [Google Scholar] [CrossRef]
- Liu, K.Y.; Xue, Y.T.; Zhou, H. Study on 3D nonlinear visco-elastic -plastic creep constitutive model with parameter unsteady of soft rock based on improved Bingham model. Rock Soil Mech. 2018, 39, 4157–4164. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Q.S.; Bo, Y.; Liu, B.; Ding, Z.W.; Zhang, Q.T. An elasto-plastic and viscoplastic damage constitutive model for dilatancy and fracturing behavior of soft rock squeezing deformation. J. Mt. Sci. 2022, 19, 826–848. [Google Scholar] [CrossRef]
- Xu, W.; Cheng, M.; Xu, X.; Chen, C.; Liu, W. Deep Learning Method on Deformation Prediction for Large-Section Tunnels. Symmetry 2022, 14, 2019. [Google Scholar] [CrossRef]
- Zhuang, W.Y.; Hou, S.K.; Liu, Y.R. Back Analysis of Mechanical Parameters of Rock Masses Based on Multi-Point Time-Dependent Monitoring Data. IOP Conf. Ser. Earth Environ. Sci. 2021, 861, 032021. [Google Scholar] [CrossRef]
- Liu, B.; Sun, J. Identification of Rheological Constitutive Model of Rock Mass and Its Application. J. North. Jiaotong Univ. 1998, 22, 10–14. [Google Scholar]
- Yang, W.D.; Zhang, Q.Y.; Zhang, J.G.; He, R.P.; Zeng, J.Q. Second development of improved Burgers creep damage constitutive model of rock based on FLAC3D. Rock Soil Mech. 2010, 31, 1956–1964. [Google Scholar] [CrossRef]
- Xu, H.F. Time dependent behaviours of strength and elasticity modulus of weak rock. Chin. J. Rock Mech. Eng. 1997, 16, 47–52. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Group | Tunnel Radius b (m) | Initial Geostress s0 (MPa) | GK (MPa) | GM (MPa) | hK (MPa Day) | hM (MPa Day) |
|---|---|---|---|---|---|---|
| Ⅰ | 7 | 40 | 1781.35 | 3000 | 7077.23 | 3.34 × 105 |
| Ⅱ | 7 | 40 | 1078.05 | 3000 | 43,188.05 | 2.04 × 106 |
| Ⅲ | 7 | 40 | 807.43 | 3000 | 128,316.25 | 6.06 × 106 |
| GK (MPa) | GM (MPa) | ηK (MPa Day) | ηM (MPa Day) | k | w1 | w2 | v |
|---|---|---|---|---|---|---|---|
| 1781.35 | 3000 | 7077.23 | 3.34 × 105 | 0.2 | 50 | 5 | 0.6 |
| 0.5 | 100 | 6 | 0.6 | ||||
| 0.8 | 200 | 7 | 0.6 |
| ρ (kg/m3) | B (MPa) | GK (MPa) | GM (MPa) | ηK (MPa Day) | k | w1 |
|---|---|---|---|---|---|---|
| 2610 | 6000 | 1781.35 | 1500 | 12,857.22 | 0.2 | 200 |
| H20 Section Steel | System Anchor | CF30 Shotcrete | |||
|---|---|---|---|---|---|
| Elastic modulus E (GPa) | 200 | Elastic modulus E (GPa) | 200 | Elastic modulus E (GPa) | 21.44 |
| Poisson’s ratio μ | 0.29 | Sectional area A (cm2) | 8.042 | Density Ρ (kg/m3) | 2500 |
| Sectional area A (cm2) | 64.28 | tensile strength Ft (KN) | 241.3 | Poisson’s ratio μ | 0.2 |
| Moment of inertia Iy (cm4) | 1600 | Bonding force of anchorage agent Cg (KN/m) | 200 | Thickness t (cm) | 20 |
| Moment of inertia Iz (cm4) | 4770 | Anchoring agent stiffness kg (MPa/m) | 17.5 | ||
| Polar moment of inertia J (cm4) | 6370 | Perimeter of anchor agent outer ring (m) | 0.1507 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Zhao, Y.; Zhang, H.; Chen, S.; Chen, L.; Wang, L. Analysis of Rheological Factors of Soft Rock Tunnel Based on Constitutive Model of Rock Parameters Attenuation with Equivalent Effect. Symmetry 2022, 14, 2432. https://doi.org/10.3390/sym14112432
Zhou Z, Zhao Y, Zhang H, Chen S, Chen L, Wang L. Analysis of Rheological Factors of Soft Rock Tunnel Based on Constitutive Model of Rock Parameters Attenuation with Equivalent Effect. Symmetry. 2022; 14(11):2432. https://doi.org/10.3390/sym14112432
Chicago/Turabian StyleZhou, Zelin, Yiqi Zhao, Heng Zhang, Shougen Chen, Liang Chen, and Lu Wang. 2022. "Analysis of Rheological Factors of Soft Rock Tunnel Based on Constitutive Model of Rock Parameters Attenuation with Equivalent Effect" Symmetry 14, no. 11: 2432. https://doi.org/10.3390/sym14112432