1. Introduction
The modeling, analysis, and control of high-order systems are an interesting challenge to give adequate results. Furthermore, some of these systems may present different time scales, which are called singularly perturbed systems. Systems of two time scales are the most common determining slow and fast variables. These systems are characterized by having parasitic parameters.
Essential references of systems with singular perturbations are found in [
1,
2]. Modeling and its properties of nonlinear systems with multiple time scales are proposed in [
3]. The correct application of some of the singular perturbation methods derived in the reduction of systems given the exact decomposition of the slow and fast modes was proposed in [
4]. Systems with singular perturbations indicate the presence of the parasitic parameter, and the control of this parameter was described in [
5]. Exponential stability applied to nonlinear singularly perturbed systems was analyzed in [
6]. The asymptotic stability of time-varying systems with singular perturbations was introduced in [
7]. Observers of singularly perturbed systems were applied in [
8,
9]. The robust stability of systems with singular perturbations was described in [
10].
More recent references and three time scales are cited below. The control of a helicopter system that determines a system with three time scales was presented in [
11]. Furthermore, sliding mode control for systems with three time scales and disturbances was proposed in [
12]. An adaptive fault-tolerant control for LTI systems with two or three time scale was presented in [
13]. The control theory with applications in the period 1984–2001 for systems with singular perturbations was described in [
14].
The bond graph methodology allows modeling, analyzing, and controlling systems in different energy domains (electrical, mechanical, hydraulic, thermal, magnetic) [
15,
16]. Some papers have been published on systems with singular perturbations with bond graphs within which the following can be cited. The models and their simplification to singular perturbation methods were described in [
17]. Reciprocal systems to obtain fast dynamics were introduced in [
18]. Reduced models of LTI systems with singular perturbations on two time scales with different causalities were proposed in [
19]. The determination of approximate models of LTI systems with mixed causalities to the storage elements in the bond graph was presented in [
20].
The determination of bond graph models and their realization in the state space indicate the graphical and mathematical symmetry of these systems.
The different dynamics of a system through causal loops were identified in [
18,
21]. State feedback using an observer for LTI systems in the physical domain was proposed in [
22]. Furthermore, the modeling of a class of nonlinear systems with two time scales was presented in [
23]. LTI systems with three time scales, their modeling, and their reduction with mixed causalities in bond graphs were introduced in [
24].
Currently, there are some software programs available for modeling and system analysis in a bond graph approach, for example the 20-sim software developed at the university of Twente, BONDLAB introduced by Bond Lab Technologies, SYMBOLS 2000 presented by Mukherjee and Samantaray, and CAMPG developed by Cadsim Engineering.
Control systems modeled in bond graphs require the design of the control law existing in different procedures, for example bond-graph-based control by Gawthrop [
25,
26] and bond graphs in control by Karnopp [
27]. A slow state estimated feedback applied to a bond graph model of a singularly perturbed system was proposed in [
22]. Furthermore, a composite feedback control of a system with singular perturbations in the physical domain was presented in [
28].
In this paper, bond graph models of a class of nonlinear systems with singular perturbations on three time scales (fast, medium, slow) are proposed. These systems can have linearly independent and dependent state variables on each time scale. Due to the properties of singularly perturbed systems, reduced models can be obtained. The deduction and comparison of reduced models from the exact models can be manifested as a symmetry of the systems with singular perturbations.
The first reduced model is when the fast dynamics have converged, which is applied to the storage elements that represent these dynamics as a derivative causality. The next reduced model is obtained by assigning derivative causality to the elements of the medium dynamics, indicating that these dynamics have converged. Therefore, the traditional quasi-steady-state model with slow dynamics in a bond graph approach is determined. This paper is based on [
19,
23]. However, the extension to three time scales to a class of nonlinear systems and the different dynamics can be linearly independent and dependent, offering the originality of this paper.
Bond graph modeling has been used extensively in robotic systems and is applied to internal combustion and electric vehicles today [
29]. Furthermore, thermal and chemical systems have been modeled with bond graphs [
15]. These systems generally determine nonlinear models on various time scales, so this paper can be useful to analyze the behavior of reduced models. Complex dynamic systems are an interesting challenge to model in bond graphs
This paper is organized as follows:
Section 2 gives the analysis of systems with singular perturbations in the algebraic approach. The modeling and reduction in the bond graph of systems with three time scales is presented in
Section 3. A case of study of an electromechanical system by obtaining the reduced models in the physical domain is described in
Section 4. Finally, in
Section 5, the conclusions are given.
2. Singular Perturbation Method
A singularly perturbed nonlinear system is expressed by:
It is assumed that in the domain of interest,
f and
g are continuous differentiable functions of their arguments
,
,
u,
, and
t. Due to the characteristics of systems with singular perturbations whose complete order is
containing small time constants, it is possible to neglect them by setting
in (
2):
and substituting (
3) into (
1):
determines a reduced differential equation of order
n and an algebraic equation of order
m.
It is assumed that one of the several solutions of (
3) is defined by:
and substituting (
5) into (
4), the quasi-steady-state model is obtained by:
The validity of the given reduction of a system with singular perturbations is due to the Tikhonov theorem, which requires the following assumptions.
Assumption 1 ([
1,
2])
. The functions f and g are continuous with the variables x, y, and t. Assumption 2 ([
1,
2])
. The differential equation of fast dynamics on the fast time scale:where and t are fixed parameters, is called the boundary layer equation of the system (1) and (2). Assumption 3 ([
1,
2])
. The root of the equation is called an isolated root in a domain D of the set of variables , u, and t, if there exists an such that the equation has no solution other than for . Assumption 4 ([
1,
2])
. The isolated root is called stable in D if, for all points , the points are asymptotically stable equilibrium points according to Lyapunov with Equation (7) as . This means that the Jacobian matrix has all eigenvalues with negative real parts, Assumption 5 ([
1,
2])
. The region of influence R of an isolated stable root is the set of points such that the solution of (7) satisfying the initial condition tends to the value , as . With the established assumptions, the Tikhonov theorem is enunciated.
Theorem 1 ([
1,
2])
. Let Assumptions 1 to 5 be satisfied. Then, the solutions and of the full system (1) and (2) are related to the solutions and of the degenerate model (3) and (4) as:where T is any value such that is an isolated stable root of for . Thus, the convergence is uniform in for and in any interval for . A singular perturbed system with three time scales is defined by:
where
f,
g, and
h are assumed to be sufficiently many times continuously differentiable functions for their arguments
,
,
,
, and
.
In this paper, the product of state variables is the specific class of nonlinear systems modeled and analyzed. These systems are described by:
where the slow, medium, and fast dynamics are
,
, and
, respectively, and the inputs are
.
The first reduction of this system is obtained by neglecting the fast dynamics
deriving the following expressions:
where:
and:
The last reduction is achieved by removing the medium dynamics with
, and the system is described by:
where:
and:
Bond graph models of singularly perturbed systems are described in the next section.
3. Singularly Perturbed Systems in a Bond Graph Approach
The bond graph methodology provides a modeling platform based on the exchange of power of the elements that form a system. Power is obtained as the product of two generalized power variables: effort
and flow
, as shown in
Figure 1.
In bond graph modeling, two generalized energy variables called momentum and displacement are used.
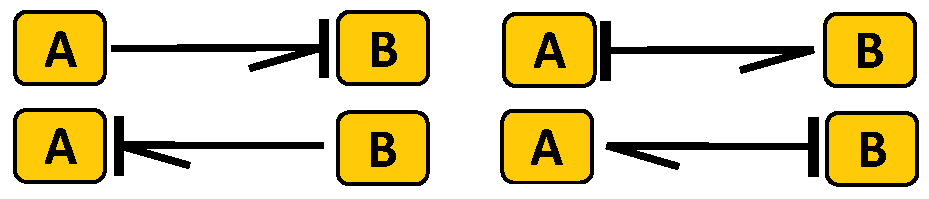
In order to obtain the sets of equations of a system, the constitutive relations of the elements are required. These relations can be dynamic or algebraic depending on the element and by the cause–effect assignment. In a bond graph, a bond with a causal stroke determines the causality assignment, and the assignments of the half arrow and the causal stroke are independent, as is shown in
Figure 2.
The different physical systems that can be used to build a dynamic system are described below:
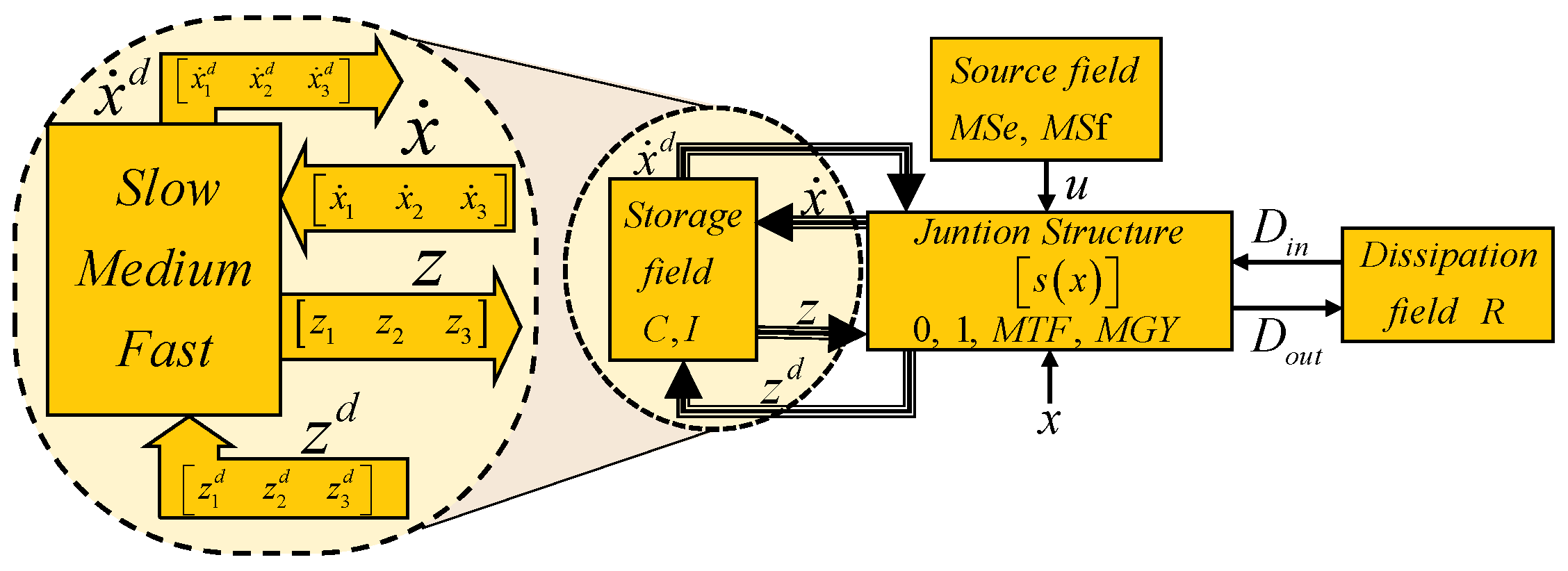
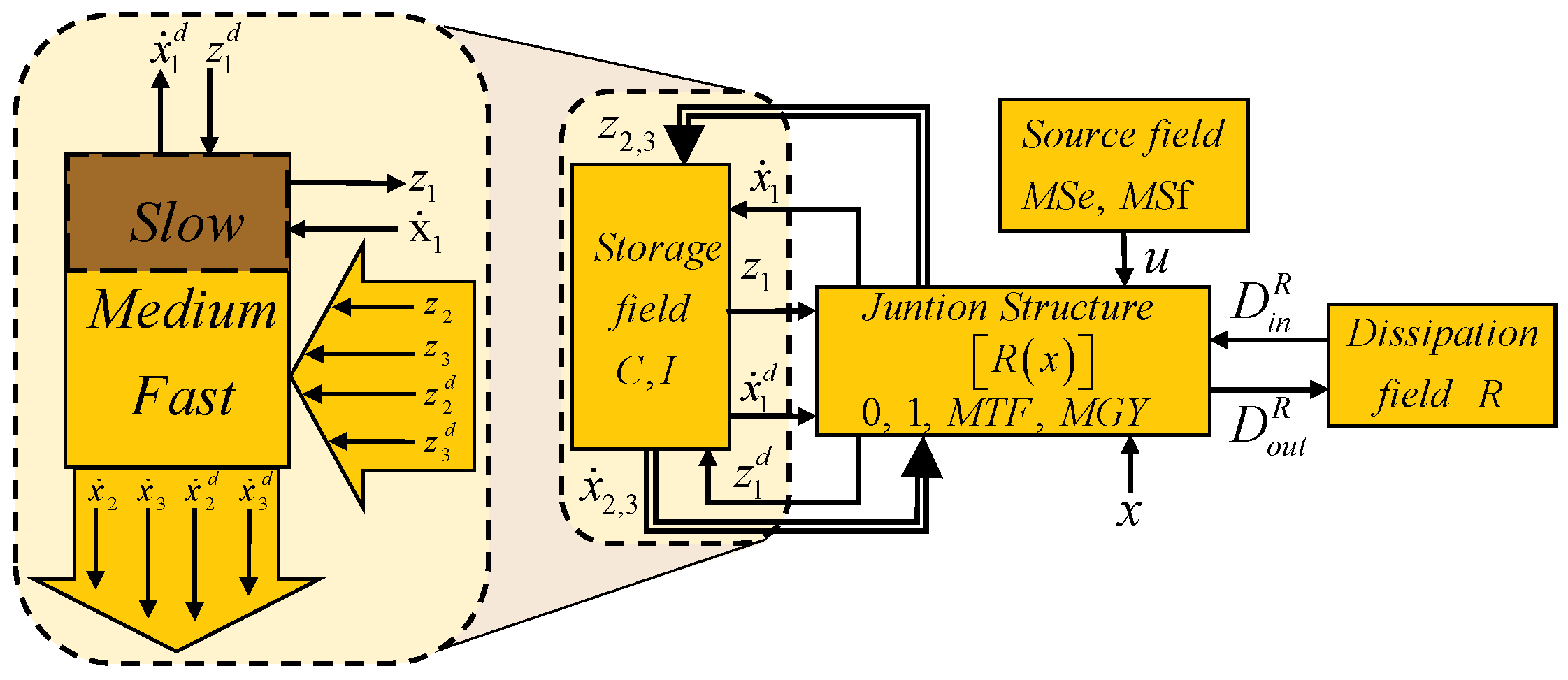
The different elements of a bond graph can be grouped into fields, and the use of junction structures allows relatively complex systems to be modeled and analyzed in this approach. A bond graph model with a preferred integral causality assignment (BGI) of a system with singular perturbations is shown in
Figure 11. The junction structure of a bond graph model with three time scales is based on the junction structure of a basic bond graph model introduced in [
30].
The block diagram of
Figure 11 is described by:
The source field denoted by that determines the plant input ;
The junction structure denoted by with zero and one junctions, transformers , and gyrators , which can be modulated by state variables ;
The energy storage field denoted by that defines energy variables and associated with C and I storage elements in an integral causality assignment describing linearly independent state variables of energy and co-energy and storage elements with a derivative causality assigned describing linearly dependent state variables of energy and co-energy .
This storage field is defined by elements that represent the slow, medium, and fast dynamics that are indicated in
Figure 11. The storage elements for each dynamic can have an integral causality whose state vector is
and a derivative causality with state vector
.
Therefore, the smallest circle in
Figure 11 defines all the storage elements, and the largest circle indicates that this field is formed by the dynamics of three time scales. These dynamics are:
- −
Slow dynamics
and
with constitutive relationships:
- −
Medium dynamics
and
with constitutive relationships:
- −
Fast dynamics
and
with constitutive relationships:
The energy dissipation field denoted by that defines and as a mixture of power variables and indicating the energy exchanges between the dissipation field and the junction structure.
The mathematical model of the diagram in
Figure 11 is obtained from the following lemma.
Lemma 1. Consider a class of nonlinear systems of the type of product of state variables composed of three time scales modeled by bond graphs in a preferred integral causality assignment whose junction structure is defined by:where the state variables are:, , and being the slow, medium, and fast dynamics, respectively, with linear constitutive relationships:then a mathematical model of this system is given by:where:with:and: The proof is presented in
Appendix A. The symmetry between graphical modeling in a bond graph and mathematical modeling in the state space through Lemma 1 is established.
In order to obtain the mathematical model with the conditions of this paper from a bond graph model of a class of nonlinear systems with singular perturbations, the following assumptions have to be considered.
Assumption 6. The constitutive relationships of the storage elements and dissipation elements are linear.
Assumption 7. The product of the state variables defines the class of nonlinear systems.
Assumption 8. The relationships between storage elements in integral and derivative causality defined by are structurally invertible.
Assumption 9. The algebraic loops between dissipation elements defined by are structurally invertible.
The bond graph methodology allows deriving different models depending on the causality applied to its elements. Furthermore, when a system has the properties of having different time scales, reduced models can be obtained. Therefore, the direct determination of reduced models for a class of nonlinear systems with three time scales in a bond graph approach is presented.
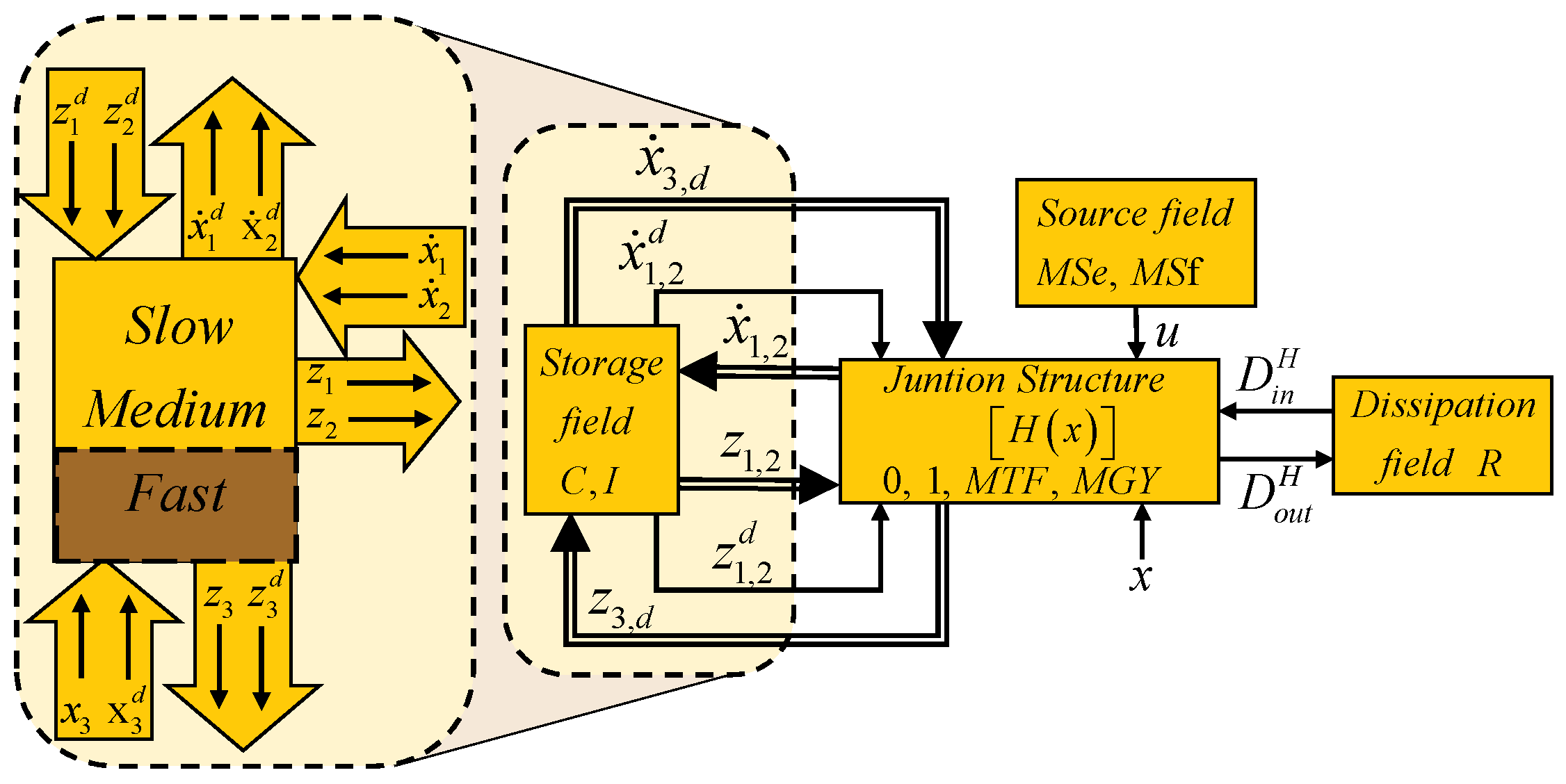
In the analysis of singularly perturbed systems, the fast dynamics reach the steady state when the medium and slow dynamics are developing their transitory period. These reduced models can be obtained by assigning a derivative causality to the storage elements of the fast dynamics and maintaining integral causality to the storage elements of the medium and slow dynamics. This formulation is proposed in
Figure 12.
The junction structure of
Figure 12 indicates that for the elements of the storage field of the slow and medium dynamics, an integral causality is assigned, which is denoted by
, and all the elements of the fast dynamics have a derivative causality, that is the elements that are in
Figure 11 in integral causality
and derivative
will all have derivative causality and are denoted by
. Therefore, these key vectors are a compact representation of the storage field:
state variables of slow and medium dynamics in integral causality;
state variables linearly independent and dependent on fast dynamics in derivative causality.
The representation of the left part of
Figure 12 shows individually the causality for each of the slow, medium, and fast dynamics. The causality of the dissipative field has to be adjusted with its key vectors
so that the entire bond graph is causally corrected.
Based on the diagram in
Figure 12, the junction structure that allows deriving the reduced models is introduced in the following lemma.
Lemma 2. Consider a class of nonlinear systems with singular perturbations modeled by bond graphs where the storage elements that represent slow and medium dynamics have an integral causality assignment, and for the storage elements for the fast dynamics, a derivative causality is assigned, whose junction structure is defined by:where the state variables are expressed by:and:withthen the quasi-steady-state models are given by:where:with:and: The model described by Lemma 2 represents a system in which the fast dynamics has converged. However, in an analysis at a time greater than the convergence of the medium dynamics, reduced models can be obtained.
The application of Lemma 2 requires that the following assumptions be satisfied.
Assumption 10. The equation:can be solved in terms of:where k are distinct roots. Assumption 11. The matrix is nonsingular.
Assumption 12. The algebraic loops matrix is nonsingular.
This new model reduced in a bond graph approach is obtained by assigning derivative causality to the storage elements of the medium and fast dynamics and to the storage elements of the slow dynamics, and an integral causality is assigned. This last reduction is illustrated in
Figure 13.
The junction structure of
Figure 13 indicates that all the storage elements of the medium and fast dynamics have derivative causality in compact form denoted by
, and for the linearly independent elements of the slow dynamics defined by
, an integral causality is assigned. The left part of
Figure 13 shows the causality assignment for each dynamics of the system. Due to the change of causalities in the elements described, the causality in the dissipation elements will have to be adjusted through the key vectors
so that the bond graph is causally correct.
The mathematical model according to
Figure 13 is obtained by applying the following lemma.
Lemma 3. Consider a class of nonlinear singularly perturbed systems modeled by bond graphs where for the storage elements that determine the slow dynamics, an integral causality is assigned, and the storage elements for the medium and fast dynamics have a derivative causality assignment with a junction structure defined by:where the state variables for the medium and fast dynamics are described by:withthen the quasi-steady-state models are given by:where:with: The application of Lemma 3 requires that the following assumptions be satisfied.
Assumption 13. The equation:can be solved in terms of:where k are distinct roots. Assumption 14. The matrix is nonsingular.
Assumption 15. The algebraic loops matrix is nonsingular.
The reduced models of a system with singular perturbations can be obtained by applying Lemmas 2 and 3, determining a symmetry with the exact models for each of the dynamics.
The most important limitation of this paper is if the fast and medium dynamics’ storage elements cannot accept derivative causality due to the configuration of the model. A possible solution to this problem is to include dissipative elements with small or large numerical values in order to be able to assign derivative causality to the storage elements for fast and medium dynamics. Other limitations are that the given assumptions cannot be applied.
The proposed methodology was applied to the following case study.
4. Case Study as an Illustrative Example
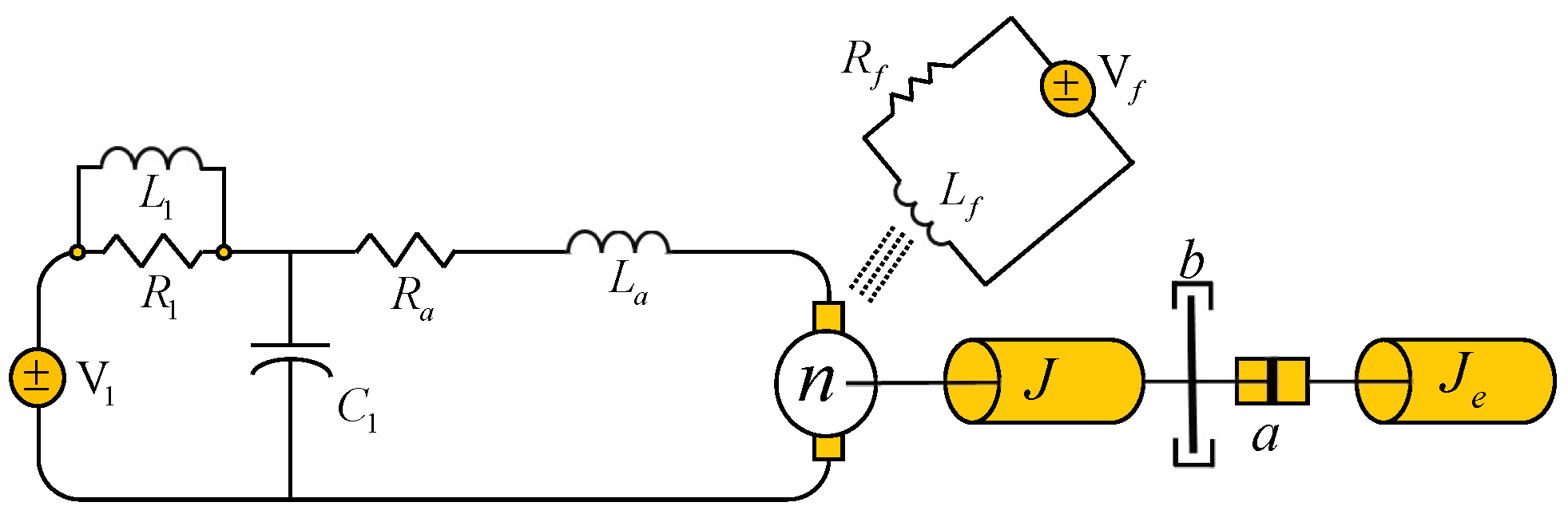
DC motors represent electromechanical systems that are widely used as actuating elements in industrial applications, whose advantages are easy speed and position control and a wide adjustability range. In the modeling of a DC motor, it is common to neglect nonlinearities in order to find a simple model. However, the assumption that the nonlinear elements on the system are negligible may give to big modeling errors. Likewise, it is common for the supply of energy to the DC motor to be obtained through the activation of elements of fast reaction electronics.
Therefore, the complete system will have three times scales and qualify as a singularly perturbed nonlinear system shown in
Figure 14.
In
Figure 14,
, and
represent the resistance, inductance, and capacitance, respectively, from the electronic input stage through which the supply voltage
is introduced to the system. The armature winding is defined by the resistance
and the inductance
;
and
are the resistance and inductance of the field winding with the voltage
applied to this circuit. The mechanical load to the motor is the connection of two inertias
J and
by using a transformer
a and a damping
b.
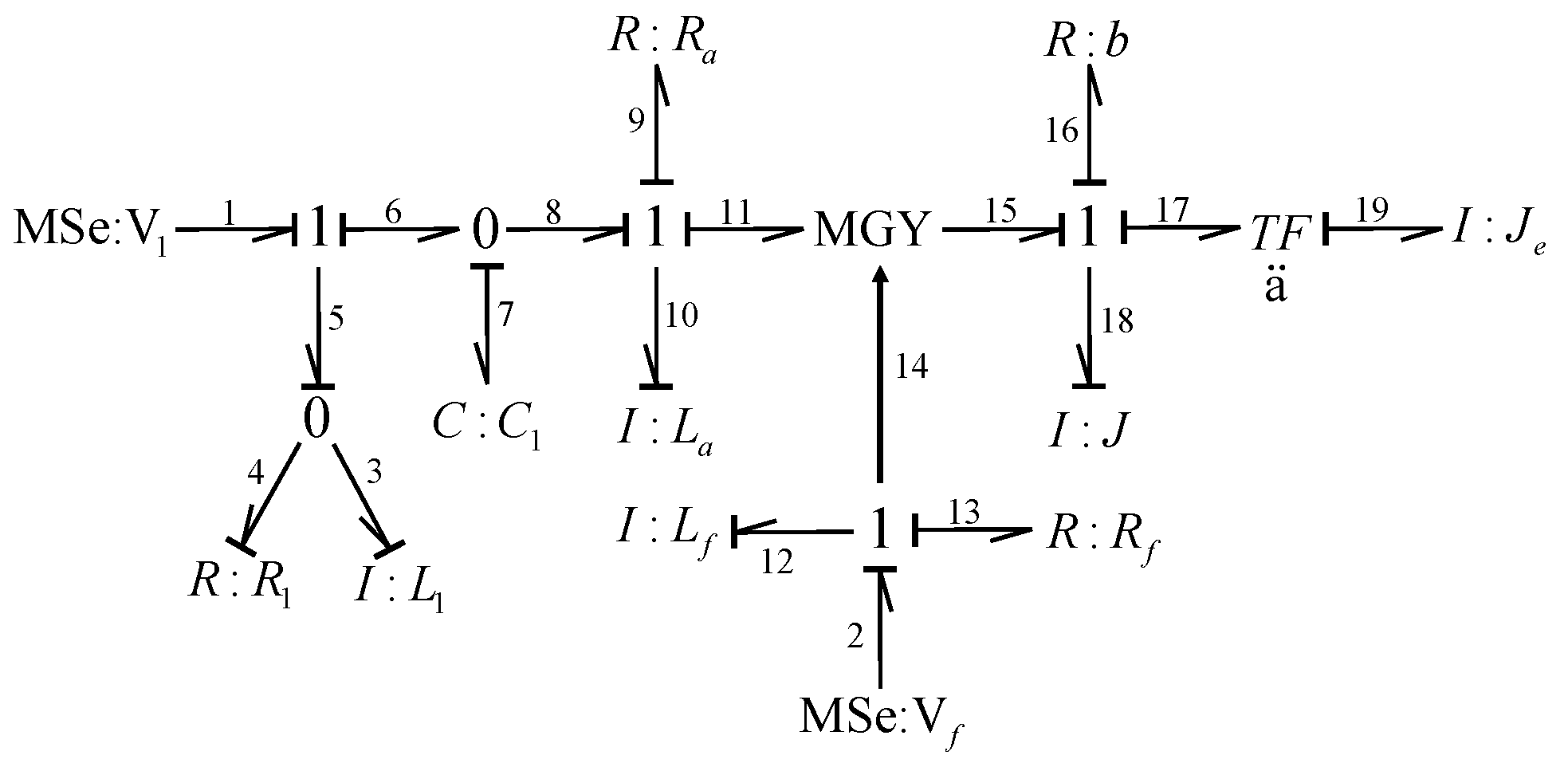
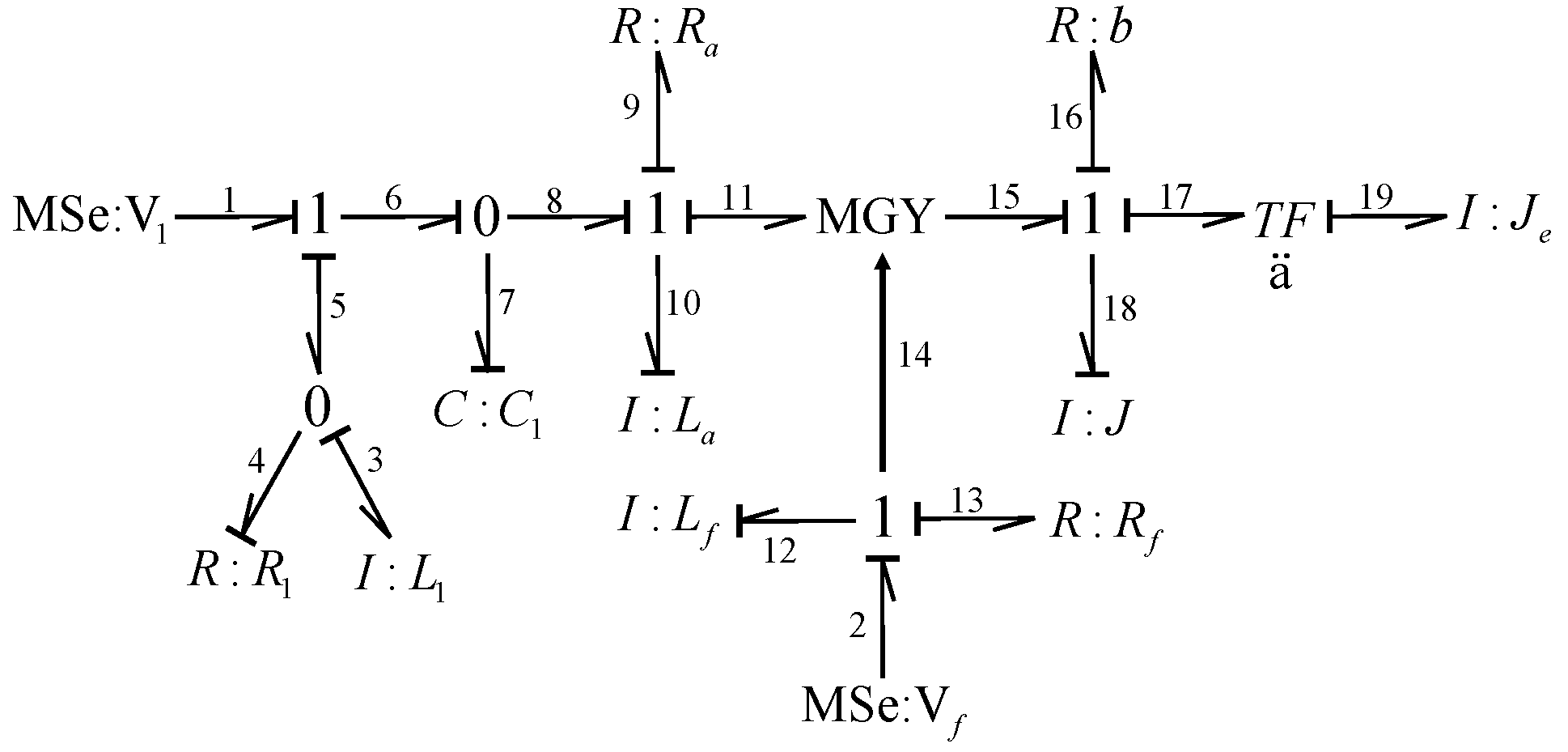
The bond graph in an integral causality assignment of the system is shown in
Figure 15.
The bond graph in integral causality assignment allows obtaining the mathematical model of the complete system using Lemma 1, the first step being the description of the dynamics that form the system. The variables of the mechanical subsystem describe the slow dynamics expressed by the key vectors and constitutive relationship:
and the key vectors for
with a derivative causality assignment that determines a linearly dependent state variable are the following:
The medium dynamics are represented by the storage elements of the electrical subsystem of the DC motor, whose key vectors and constitutive relationship are:
The electronic subsystem for supplying power to the motor represents the fast dynamics defined by:
according to
Figure 11 for the dissipation elements:
and the inputs:
The system order is given by
,
,
, and
; thus,
and
. The junction structure
is described by:
From (
40), (
48), (
82), (
84), and (
92), the relationship of the linearly dependent state variable to the linearly independent variable is described by:
From (
45)–(
47), and (
49) with (
82), (
86), (
88), and (
93), the mathematical model of the complete system is given by:
Assigning a derivative causality to all the storage elements
that represent the fast dynamics
and maintaining integral causality to the elements of the medium and slow state variables
and
, respectively, the reduced model (
15) applying Lemma 2 is obtained.
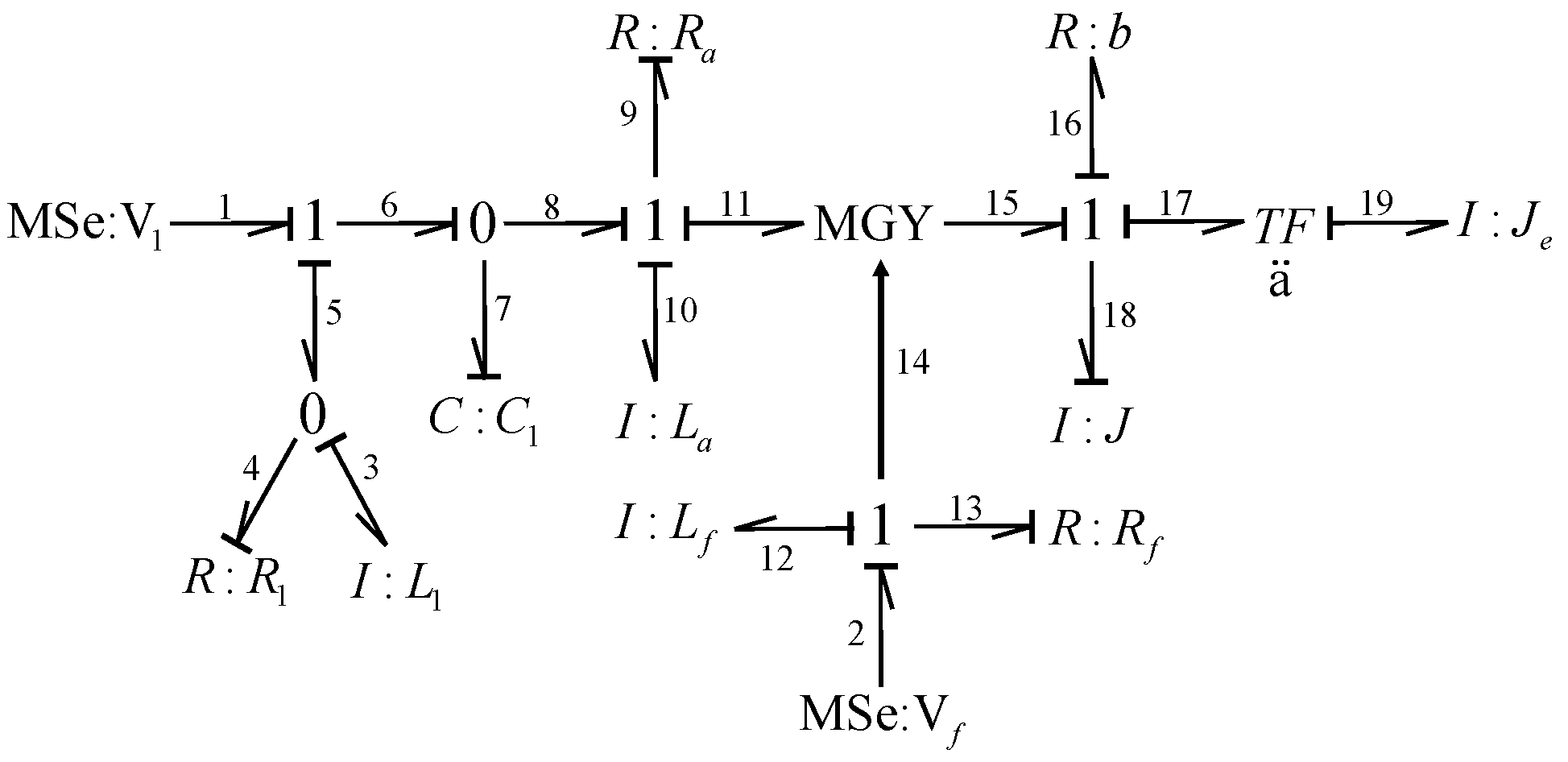
Figure 16 shows the bond graph to obtain the reduced model when the fast dynamics have converged.
In this case, the dissipation elements retain the same causality with respect to the bond graph of
Figure 13, then the key vectors and their constitutive relationship are defined by:
Applying Lemma 2, the junction structure of the bond graph of
Figure 14 is given by:
From (
56), (
57), (
60), and (
61) with (96), the quasi-steady-state model for
and
is defined by:
From (
58)–(
60) with (96), the expression of the fast dynamics when they have converged is described by:
The smallest model is obtained by assigning derivative causality to the storage elements
of the medium dynamics
, which is shown in
Figure 17.
In order to have a correct bond graph, the key vectors and the constitutive relation for the dissipation elements are defined by:
and the junction structure is obtained by:
The quasi-steady-state model applying Lemma 3 is obtained from (
73), (
75), and (
77) with (100) given by:
The convergence of the medium and fast dynamics is determined from (
74), (
76), and (
77) with (100) expressed as:
In order to show the effectiveness of the proposed methodology,
Table 1 gives the numerical parameters of the bond graph illustrated in
Figure 15.
In order to verify numerically the reduced models with respect to the exact model, the graphs are illustrated in the following figures. The simulation of this case study was obtained by using the 20-sim software.
It is important to note that the simulation results for the exact model shown in
Figure 15 were obtained directly from the bond graph library of the 20-sim software. However, the simulation of the reduced model was carried out through Equations (
97) and (
98) for the convergence of the fast dynamics. The simulation of the reduced model for the convergence of the medium and fast dynamics was used in Equations (
101) and (
102).
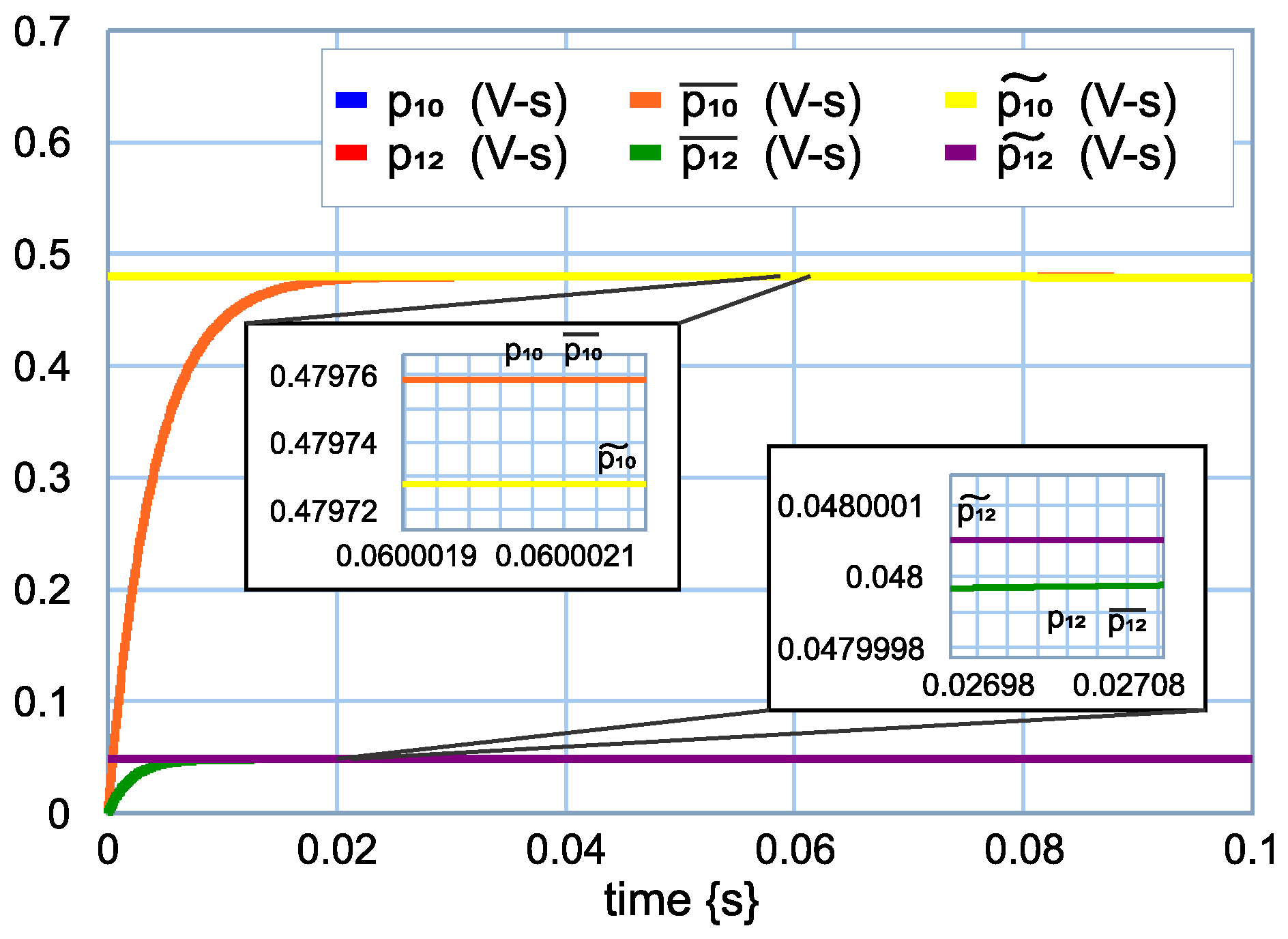
Figure 18 shows the behavior of the fast state variables, based on the exact model
and the reduced model
given by (
98).
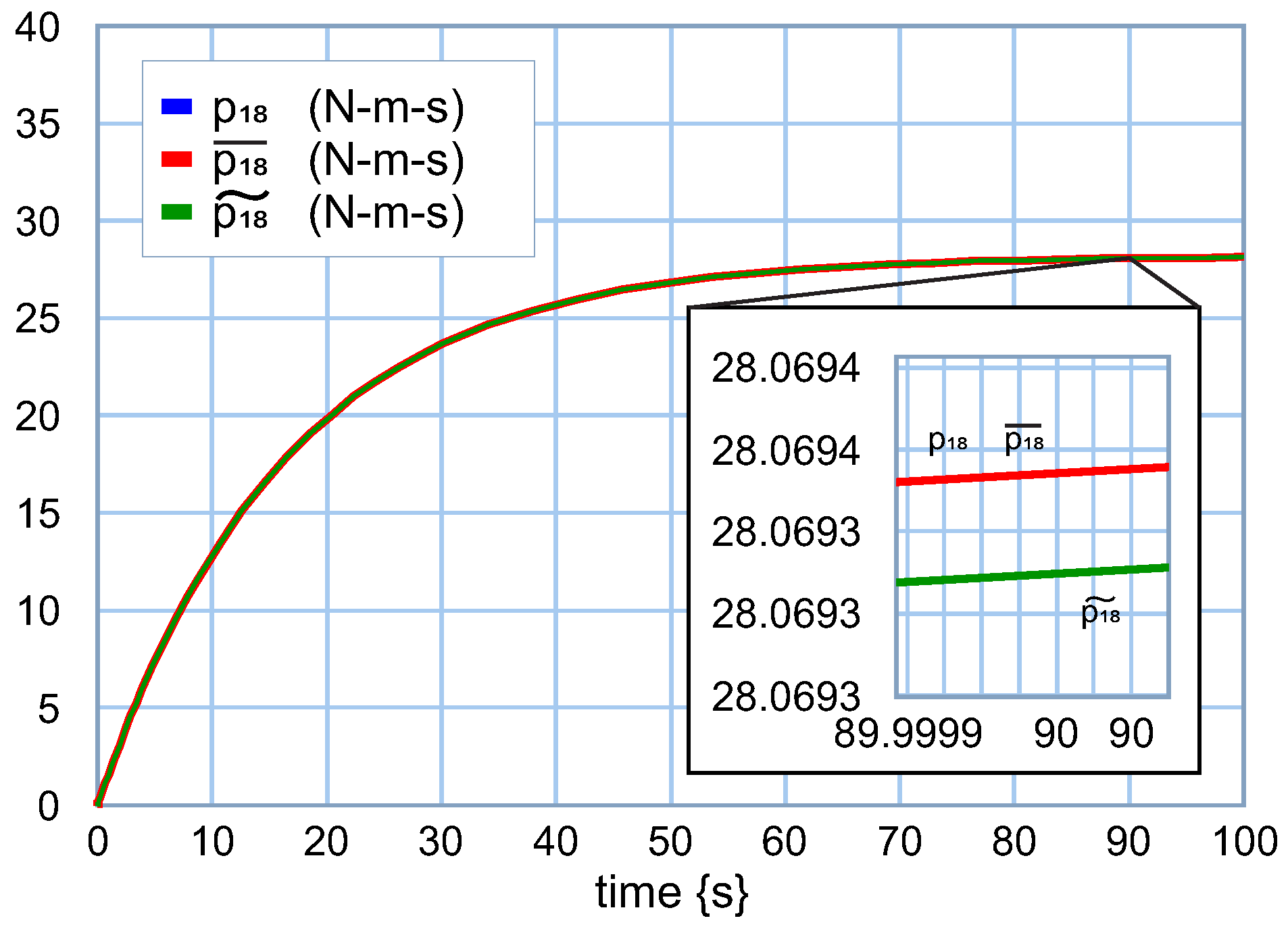
Now, the performance of the state variables of the medium dynamics is shown in
Figure 19. The great closeness of the models reduced to the exact model can be seen.
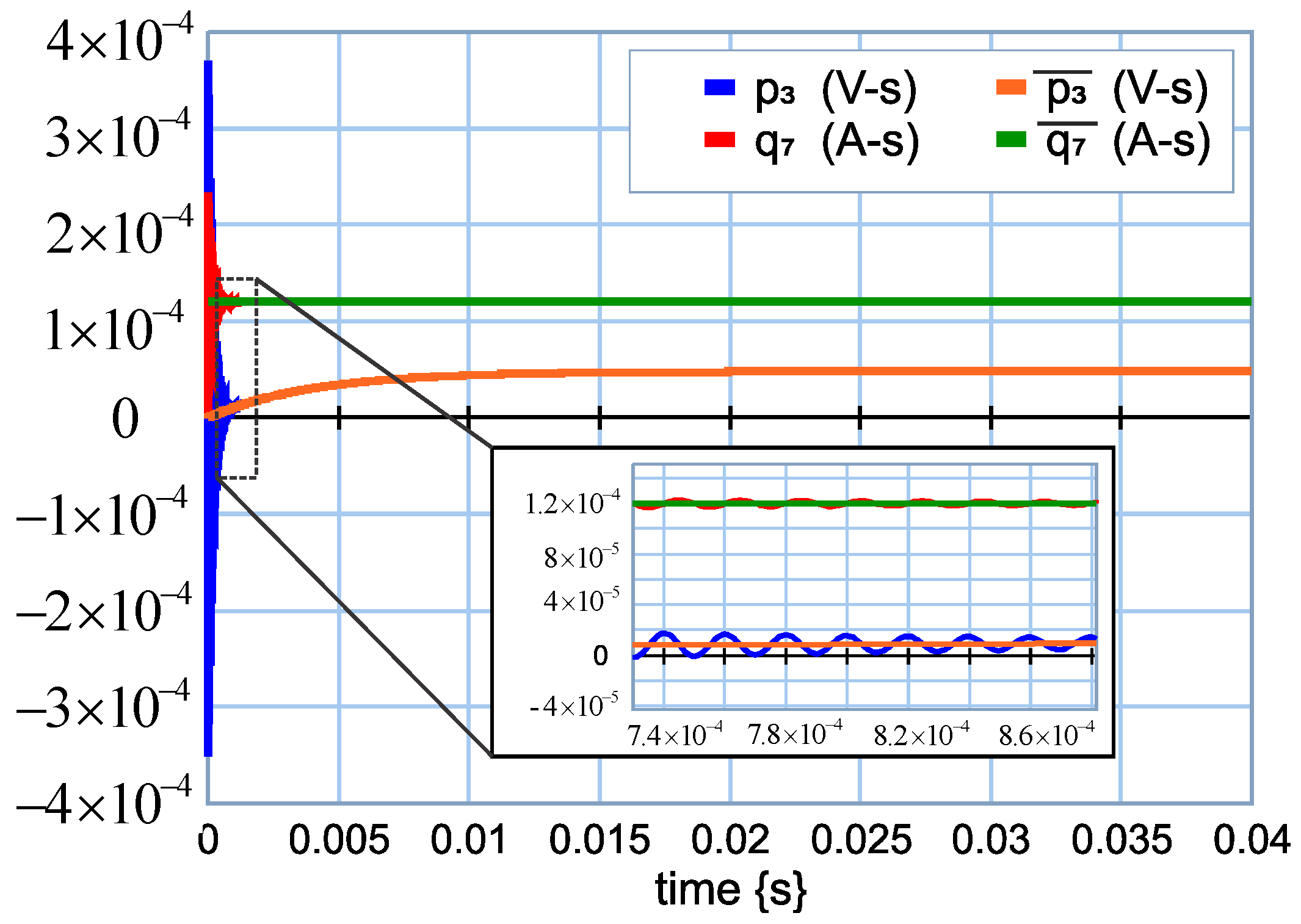
Finally, the behavior of the state variable of the slow dynamics is illustrated in
Figure 20.
It is clear from
Figure 18,
Figure 19 and
Figure 20 that the system contains three time scales: the simulation time for the convergence of the fast dynamics is from 0–0.015 s, of the medium dynamics from 0–0.03 s, and of the slow dynamics from 0–100 s.
This paper can be applied to multidisciplinary systems, for example mechatronics, electric vehicles [
29], and chemical processes [
15], where they are characterized by having several time scales in their dynamic behavior.
Some complex dynamical systems have been modeled in bond graphs, for example [
31,
32,
33], and the possible application of this paper requires that the system contains several time scales and the class of nonlinear systems be according to the product of the state variables.
5. Conclusions
The analysis of a class of nonlinear systems with singular perturbations in a bond graph approach was presented. The type of systems, although they are specific, can be found in many electrical machines, as well as in aeronautical systems. One of the main objectives of singularly perturbed systems is to obtain simplified models. Therefore, reduced models in the physical domain have been proposed. The key for the direct determination of these models is to assign derivative causality to the storage elements that converge to their steady-state value, and for the remaining dynamics, an integral causality is assigned. In this way, the three time scales (fast, medium, slow) are reduced to two time scales (medium, slow) and finally to one (slow). The proposed methodology was applied to an electromechanical system, obtaining the reduced models, and the simulation results were shown, verifying the effectiveness of the presented lemmas.
Through this paper, the direct simulation of the bond graphs for reduced models is a challenge to achieve using the bond graph library of the 20-sim software, but it is required as future work to have these objectives.
Finally, the symmetry of graphical and mathematical models was established for systems modeled in a bond graph. Furthermore, reduced models from exact models for systems on three time scales by determining symmetries were presented.


 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}