
Integrated Geomechanical and Digital Photogrammetric Survey in the Study of Slope Instability Processes of a Flysch Sea Cliff (Debeli Rtič Promontory, Slovenia)
 , , ,
, , ,  and
and 
Abstract
:1. Introduction
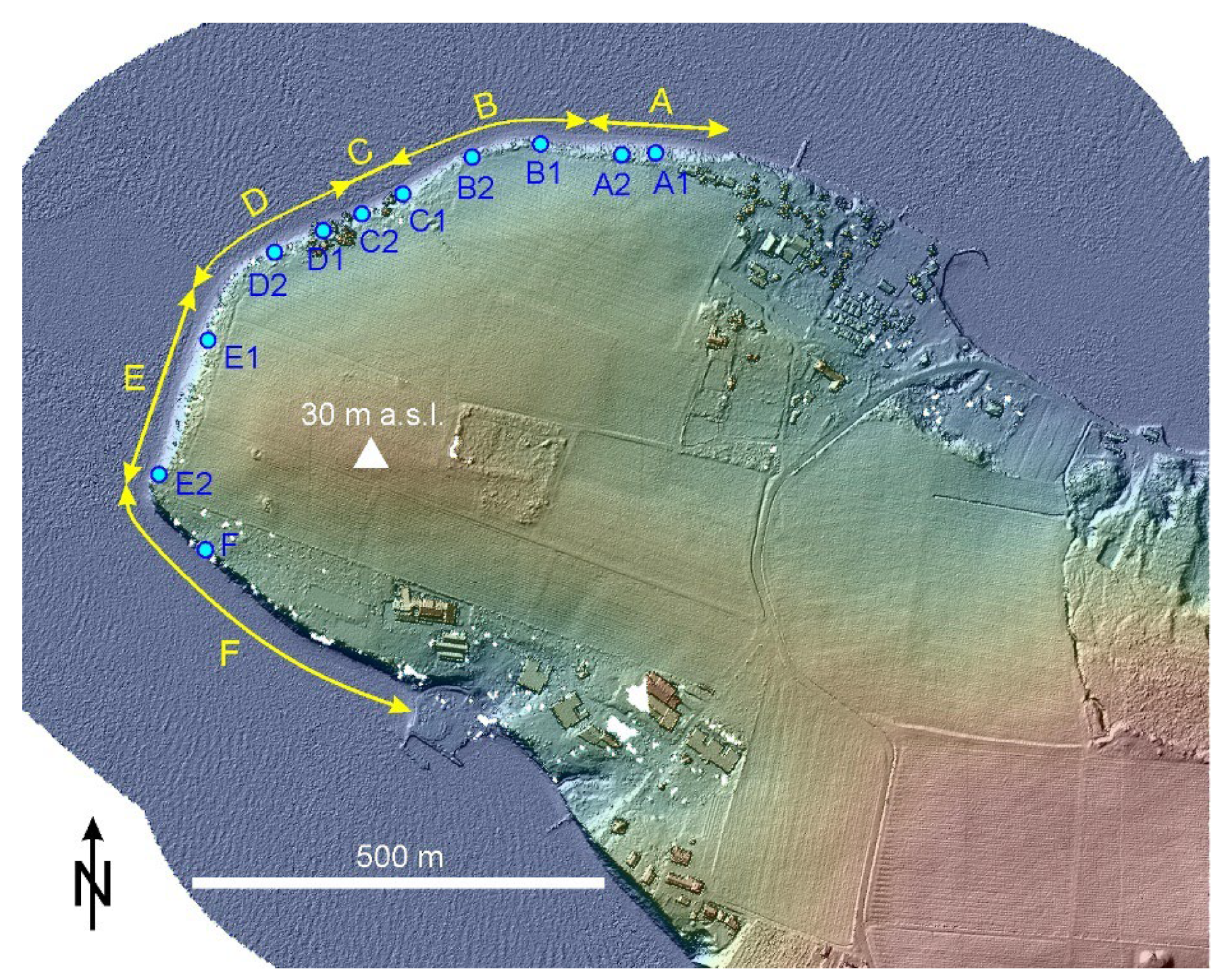
2. Study Area
3. Materials and Methods
3.1. Geomechanical Field Survey (Validation)
3.2. GNSS and Total Station Surveys
3.3. Image Acquisition–UAV Survey
3.4. Image Acquisition—Mobile Phone Survey
3.5. Photogrammetric Processing–Point Clouds and 3D Models
3.6. Discontinuity Set Extraction
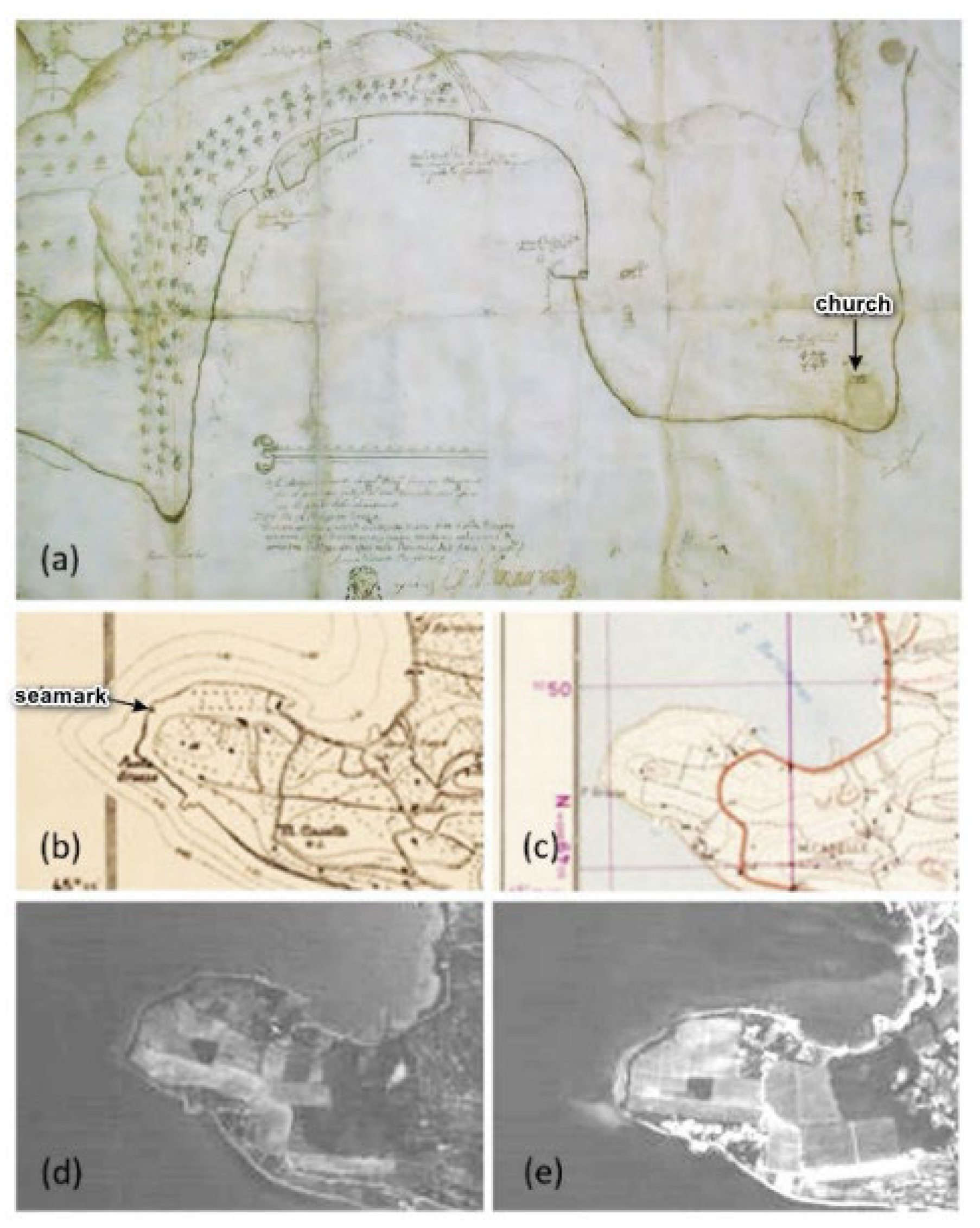
4. Historical Maps and Images
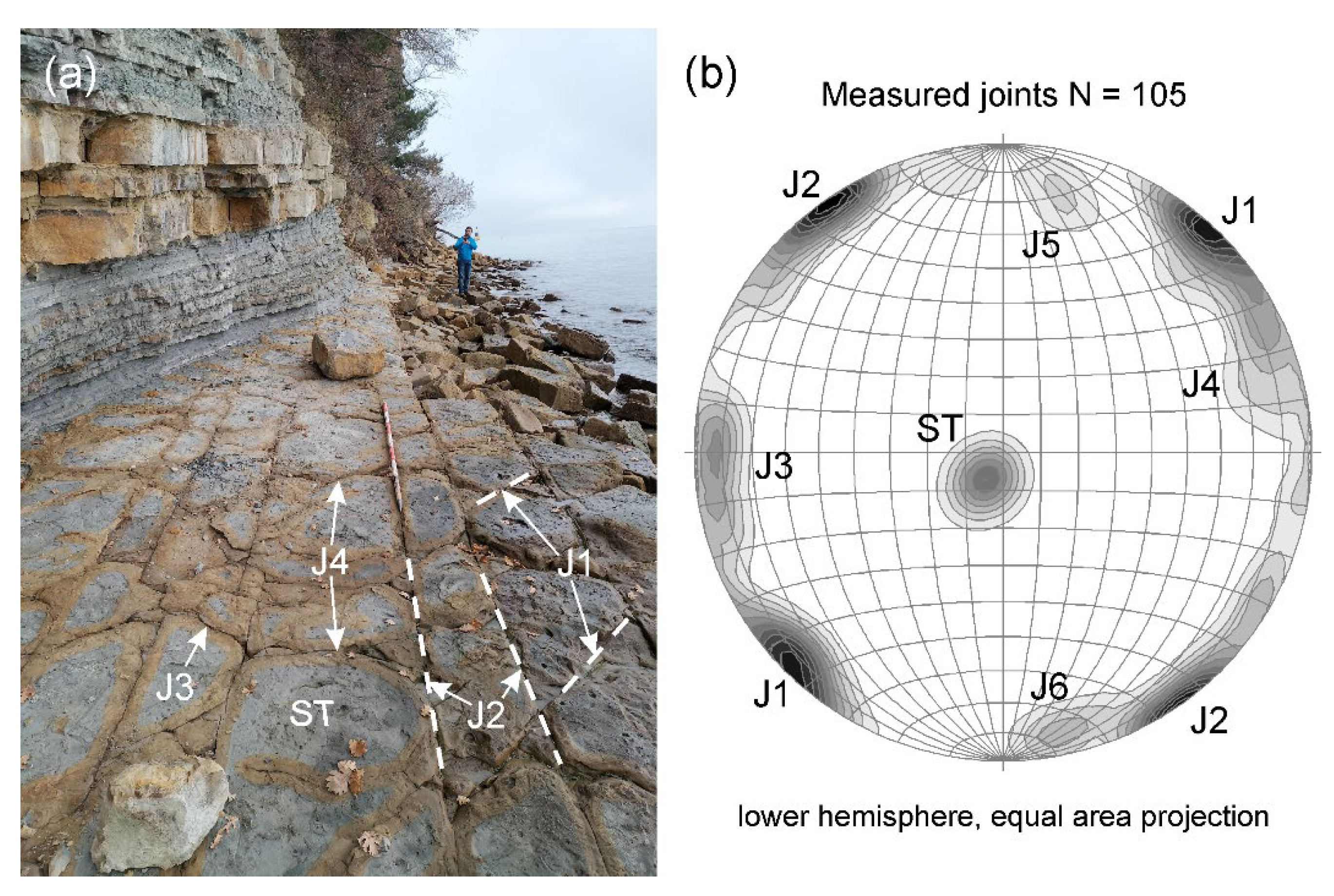
5. Results of Geomechanical Field Survey
6. Results of Photogrammetric Procedures
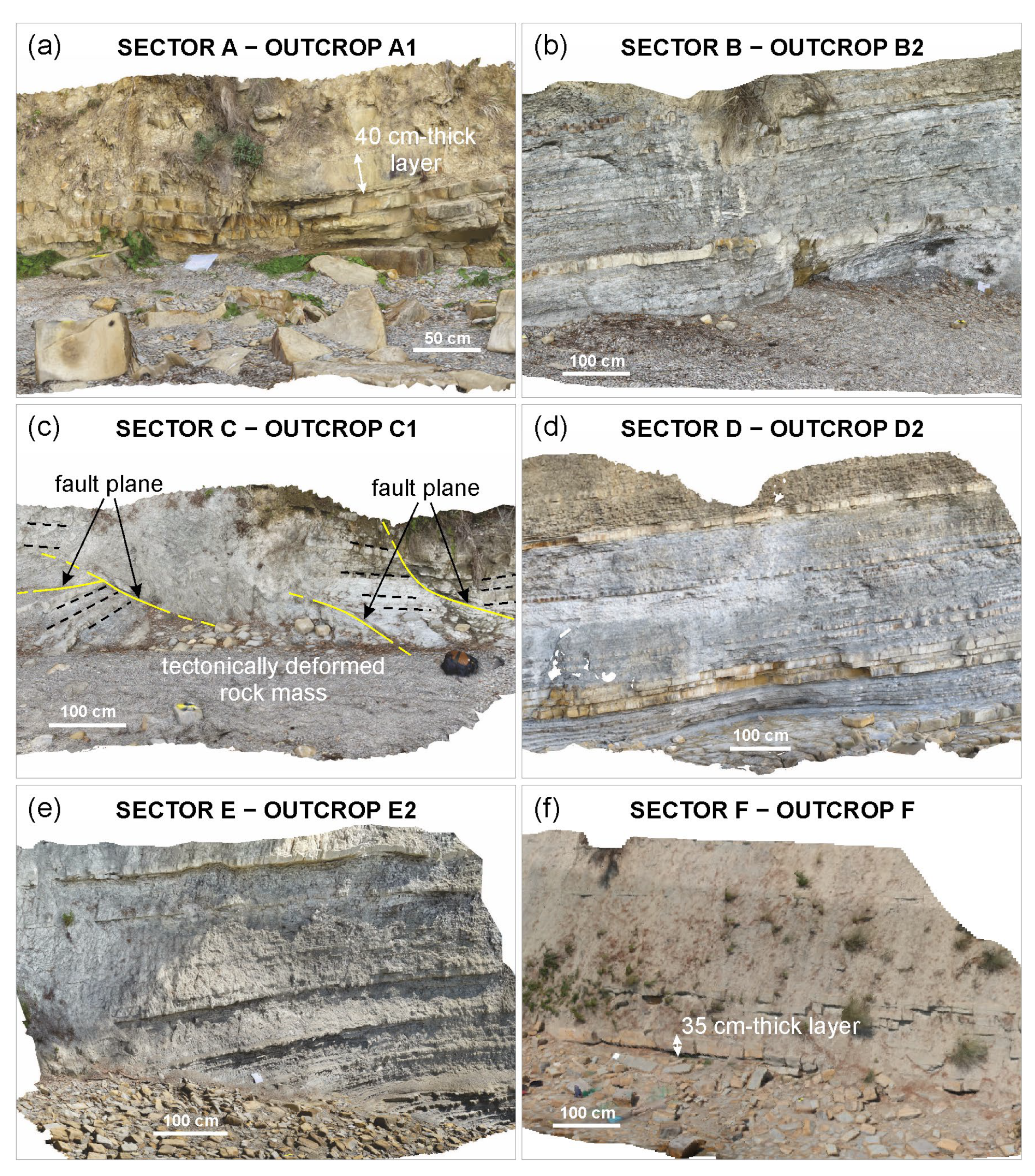
6.1. UAV-DP Products
6.2. MP Morphometric Analysis
6.3. Rock Mass Characterization
7. Discussion
7.1. Photogrammetric Procedures
7.2. Sea Cliff Instability Processes
- Fall and/or toppling of individual overhanging sandstone slabs (Figure 16a);
- Sliding and/or toppling of shallow stratified rock masses (Figure 16b);
- Sliding of larger and deeper rock masses of a prevailing arenaceous Flysch (Figure 16c);
- Sliding of thin slices of the cliff made up of a prevailing marly Flysch (Figure 16d).
8. Conclusions
- An integrated study approach that combines the results of a geomechanical survey and data obtained using DP is effective in the investigation of slope instability processes affecting a sea cliff. In particular, UAV surveys are useful to obtain information on the rock mass features in inaccessible areas where the traditional geomechanical survey cannot be safely performed;
- MP devices demonstrate a high degree of suitability for image data acquisition in very particular conditions, such as the presence of partially collapsed horizontal or sub-vertical trees or other vegetation that masks the underlying rock mass;
- MP-derived point clouds can be effective for the extraction of joint orientation data from steep sea cliffs since images are collected very close to the cliff from many orientations with respect to the slope face;
- The comparison between UAV-derived products and MP-derived products identified that the use of UAVs allows the user to map large sections of the coast relatively quickly. However, in particular conditions characterized by the presence of vegetation, MP-derived point clouds are easier to manipulate since they do not require extensive cleaning to remove the masking effects of vegetation.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DP | Digital Photogrammetry |
| UAV | Unmanned Aerial Vehicle |
| MP | Mobile Phone |
| GOT | Gulf of Trieste |
| RS | Remote Sensing |
| SfM | Structure from Motion |
| MVS | Multi-View Stereo |
| a.s.l. | above sea level |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| VTOL | Vertical Take Off and Landing |
| UAS | Unmanned Aerial System |
| HR | High Resolution |
| DSE | Discontinuity Set Extractor |
| GSI | Geological Strength Index |
References
- Kennedy, D.M.; Stephenson, W.J.; Naylor, L.A. Introduction to the rock coasts of the world. Geol. Soc. Lond. Mem. 2014, 40, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Furlani, S.; Pappalardo, M.; Gómez-Pujol, L.; Chelli, A. The rock coast of the Mediterranean and Black Seas. Geol. Soc. Lond. Mem. 2014, 40, 89–122. [Google Scholar] [CrossRef]
- Salman, A.; Lombardo, S.; Doody, P. Living with Coastal Erosion in Europe: Sediment and Space for Sustainability. Eurosion Project Reports. Off. Off. Publ. Eur. Communities 2004. Available online: http://resolver.tudelft.nl/uuid:483327a3-dcf7-4bd0-a986-21d9c8ec274e (accessed on 16 July 2022).
- Young, A.P. Decadal-scale coastal cliff retreat in southern and central California. Geomorphology 2018, 300, 164–175. [Google Scholar] [CrossRef]
- Young, A.P.; Carilli, J.E. Global distribution of coastal cliffs. Earth Surf. Process. Landf. 2019, 44, 1309–1316. [Google Scholar] [CrossRef] [Green Version]
- Biolchi, S.; Furlani, S.; Covelli, S.; Busetti, M.; Cucchi, F. Morphoneotectonic map of the coastal sector of the Gulf of Trieste (NE Italy). J. Maps 2016, 12, 936–946. [Google Scholar] [CrossRef]
- Furlani, S. Shore platforms along the Northwestern istrian coast: An overview. Ann. Ser. Hist. Nat. 2003, 13, 247–256. [Google Scholar]
- Furlani, S.; Devoto, S.; Biolchi, S.; Cucchi, F. Factors Triggering Sea Cliff Retreat Instability Along the Slovenian Coast. J. Coast Res. 2011, 61, 387–393. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Bolla, A.; Rigo, E. 3D stress-strain analysis of a failed limestone wedge influenced by an intact rock bridge. Rock Mech. Rock Eng. 2016, 49, 3223–3242. [Google Scholar] [CrossRef]
- Gigli, G.; Casagli, N. Semi-automatic extraction of rock mass structural data from high resolution LIDAR point clouds. Int. J. Rock Mech. Min. Sci. 2011, 48, 187–198. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D.; Elmo, D. Terrestrial remote sensing-based estimation of mean trace length, trace intensity and block size/shape. Eng. Geol. 2011, 119, 96–111. [Google Scholar] [CrossRef]
- Battulwar, R.; Zare Naghadehi, M.; Emami, E.; Sattarvand, J. A state-of-the-art review of automated extraction of rock mass discontinuity characteristics using three-dimensional surface models. J. Rock Mech. Geotech. 2021, 13, 920–936. [Google Scholar] [CrossRef]
- Corradetti, A.; Tavani, S.; Parente, M.; Iannace, A.; Vinci, F.; Pirmez, C.; Torrieri, S.; Giorgioni, M.; Pignalosa, A.; Mazzoli, S. Distribution and arrest of vertical through-going joints in a seismic-scale carbonate platform exposure (Sorrento peninsula, Italy): Insights from integrating field survey and digital outcrop model. J. Struct. Geol. 2017, 108, 121–136. [Google Scholar] [CrossRef]
- Salvini, R.; Mastrorocco, G.; Esposito, G.; Di Bartolo, S.; Coggan, J.; Vanneschi, C. Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat. Hazards Earth Syst. Sci. 2018, 18, 287–302. [Google Scholar] [CrossRef] [Green Version]
- Donati, D.; Stead, D.; Brideau, M.-A.; Ghirotti, M. Using pre-failure and post-failure remote sensing data to constrain the three-dimensional numerical model of a large rock slope failure. Landslides 2021, 18, 827–847. [Google Scholar] [CrossRef]
- Schilirò, L.; Robiati, C.; Smeraglia, L.; Vinci, F.; Iannace, A.; Parente, M.; Tavani, S. An integrated approach for the reconstruction of rockfall scenarios from UAV and satellite-based data in the Sorrento Peninsula (southern Italy). Eng. Geol. 2022, 308, 106795. [Google Scholar] [CrossRef]
- Stoop, J. New Ways to Use Smartphone for Science. Elsevier Connect 2017. Available online: https://www.elsevier.com/connect/new-ways-to-use-smartphones-for-science (accessed on 26 July 2022).
- Weng, Y.-H.; Sun, F.-S.; Grigsby, J.D. GeoTools: An android phone application in geology. Comput. Geosci. 2012, 44, 24–30. [Google Scholar] [CrossRef]
- Xie, Y.; Gao, G.; Niu, N.; Wang, Y. Exploration and practice of the use of mobile devices to assist in general geological field practice. J. Geogr. High. Educ. 2021. [Google Scholar] [CrossRef]
- Corradetti, A.; Seers, T.D.; Billi, A.; Tavani, S. Virtual outcrops in a pocket: Smartphone as a fully equipped photogrammetric data acquisition tool. GSA Today 2021, 31, 4–9. [Google Scholar] [CrossRef]
- Jurkovšek, B.; Biolchi, S.; Furlani, S.; Jurkovšek, T.; Zini, L.; Jež, J.; Tunis, G.; Bavez, M.; Cucchi, F. Geology of the Classical Karst Region (SW-NE Italy). J Maps 2016, 12, 352–362. [Google Scholar] [CrossRef] [Green Version]
- Placer, L. Strukturne posebnosti severne Istre (Structural curiosity of the northern Istria). Geologija 2005, 48, 245–251. (In Slovenian) [Google Scholar] [CrossRef]
- Köppen, W. Grundriss der Klimakunde, 2nd ed.; Walter de Gruyter: Berlin, Germany, 1931. [Google Scholar]
- Raicich, F.; Colucci, R.R. A near-surface temperature time series from Trieste, northern Adriatic Sea (1899–2015). Earth Syst. Sci. Data 2019, 11, 761–768. [Google Scholar] [CrossRef]
- Tommasini, T. Dieci anni di osservazioni meteorologiche a Borgo Grotta Gigante sul Carso Triestino (1967–1976). Atti Mem. Della Comm. Grotte E. Boegan 1979, 24, 1–11. [Google Scholar]
- Carrera, F.; Cerasuolo, M.; Tomasin, A.; Canestrelli, P. La nebbia a Venezia nel quarantennio 1951–1990. Analisi comparata degli andamenti di visibilità, pressione, temperatura e vento. Istituto Veneto di Scienze, Lettere ed Arti, Commissione di studio dei provvedimenti per la conservazione e difesa della laguna e della città di Venezia. Rapp. Studi 1995, 12, 235–271. [Google Scholar]
- Dorigo, L. Ufficio idrografico. La laguna di Grado e le sue foci: Ricerche e rilievi idrografici. Magistr. Alle Acque 1965, 155, 231. [Google Scholar]
- Polli, S. Tabelle di Previsione Delle Maree per Trieste e L’Adriatico Settentrionale per L’anno 1971; Istituto Sperimentale Talassografico “Francesco Vercelli”: Trieste, Italy, 1970. [Google Scholar]
- Dal Cin, R.; Simeoni, U. A model for determining the classification, vulnerability and risk in the southern coastal zone of the Marche (Italy). J. Coast Res. 1994, 8, 18–29. [Google Scholar]
- Cavaleri, L.; Bergamasco, L.; Bertotti, L.; Bianco, L.; Drago, M.; Iovenitti, L.; Lavagnini, A.; Liberatore, G.; Martorelli, S.; Mattioli, F.; et al. Wind and waves in the northern Adriatic Sea. Il Nuovo Cimento C 1996, 19, 1–36. [Google Scholar] [CrossRef]
- Meteoblue. Available online: https://content.meteoblue.com/it/research-development/case-studies/bora-wind-study (accessed on 26 July 2022).
- Menegoni, N.; Giordan, D.; Perotti, C.; Tannant, D.D. Detection and geometric characterization of rock mass discontinuities using a 3D high-resolution digital outcrop model generated from RPAS imagery—Ormea rock slope, Italy. Eng. Geol. 2019, 252, 145–163. [Google Scholar] [CrossRef]
- Devoto, S.; Macovaz, V.; Mantovani, M.; Soldati, M.; Furlani, S. Advantages of using UAV Digital Photogrammetry in the study of slow-moving coastal landslides. Remote Sens. 2020, 12, 3566. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Bolla, A. Gravity-induced rock mass damage related to large en masse rockslides: Evidence from Vajont. Geomorphology 2015, 234, 28–53. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Bolla, A. Gravity-induced fracturing in large rockslides: Possible evidence from Vajont. In Engineering Geology for Society and Territory: Landslide Processes; Lollino, G., Giordan, D., Crosta, G.B., Corominas, J., Azzam, R., Wasowski, J., Sciarra, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 213–216. [Google Scholar]
- Bolla, A.; Paronuzzi, P. Geomechanical field survey to identify an unstable rock slope: The Passo della Morte case history (NE Italy). Rock Mech. Rock Eng. 2020, 53, 1521–1544. [Google Scholar] [CrossRef]
- Paronuzzi, P.; Bolla, A. In-depth field survey of a rockslide detachment surface to recognise the occurrence of gravity-induced cracking. Eng. Geol. 2022, 302, 106636. [Google Scholar] [CrossRef]
- Brooke-Holland, L. Unmanned Aerial Vehicles (Drones): An Introduction; House of Commons Library: London, UK, 2012. [Google Scholar]
- Francioni, M.; Salvini, R.; Stead, D.; Coggan, J. Improvements in the integration of remote sensing and rock slope modelling. Nat. Hazards 2018, 90, 975–1004. [Google Scholar] [CrossRef] [Green Version]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review article: The use of remotely piloted aircraft systems (RPASs) for natural hazards monitoring and management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef] [Green Version]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications-A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef]
- Colica, E.; D’Amico, S.; Iannucci, R.; Martino, S.; Gauci, A.; Galone, L.; Galea, P.; Paciello, A. Using unmanned aerial vehicle photogrammetry for digital geological surveys: Case study of Selmun promontory, northern of Malta. Env. Earth Sci. 2021, 80, 551. [Google Scholar] [CrossRef]
- Tavani, S.; Billi, A.; Corradetti, A.; Mercuri, M.; Bosman, A.; Cuffaro, M.; Seers, T.; Carminati, E. Smartphone assisted fieldwork: Towards the digital transition of geoscience fieldwork using LiDAR-equipped iPhones. Earth-Sci. Rev. 2022, 227, 103969. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D. Close-range terrestrial digital photogrammetry and terrestrial laser scanning for discontinuity characterization on rock cuts. Eng. Geol. 2009, 106, 163–182. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, Y.; Li, X.; Wang, X.; Ma, F.; Zhao, J.; Zhang, Y. Extraction and statistics of discontinuity orientation and trace length from typical fractured rock mass: A case study on the Xinchang underground research laboratory site, China. Eng. Geol. 2020, 269, 105553. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R. Characterization of rock slopes through slope mass rating using 3D point clouds. Int. J. Rock Mech. Min. Sci. 2016, 84, 165–176. [Google Scholar] [CrossRef] [Green Version]
- Kong, D.; Saroglou, C.; Wu, F.; Li, B. Development and application of UAV-SfM photogrammetry for quantitative characterization of rock mass discontinuities. Int. J. Rock Mech. Min. Sci. 2021, 141, 104729. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R. Discontinuity spacing analysis in rock masses using 3D point clouds. Eng. Geol. 2015, 195, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Riquelme, A.J. Discontinuity Set Extractor (DSE). Available online: https://personal.ua.es/en/ariquelme/discontinuity-set-extractor-software.html (accessed on 9 May 2022).
- Herrero, M.-J.; Pérez-Fortes, A.P.; Escavy, J.I.; Insua-Arévalo, J.M.; De la Horra, R.; López-Acevedo, F.; Trigos, L. 3D model generated from UAV photogrammetry and semi-automatic rock mass characterization. Comput. Geosci. 2022, 163, 105121. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Bolla, A.; Beinat, A.; Paronuzzi, P.; Peloso, C. Combined field and Structure from Motion survey to identify rock discontinuity sets of a shallow rockslide. IOP Conf. Ser. Earth Environ. Sci. 2021, 906, 12103. [Google Scholar] [CrossRef]
- Marinos, P.; Hoek, E. Estimating the geotechnical properties of heterogeneous rock masses such as Flysch. Bull. Eng. Geol. Env. 2001, 60, 85–92. [Google Scholar] [CrossRef]
- Marinos, P.; Marinos, V.; Hoek, E. The Geological Strength Index (GSI): A characterization tool for assessing engineering properties for rock masses. In Proceedings of the International Workshop on Rock Mass Classification for Underground Mining, Vancouver, BC, Canada, 31 May 2007; Mark, C., Pakalnis, R., Tuchman, R.J., Eds.; US Department of Health and Human Services: Pittsburgh, PA, USA, 2007; pp. 1248–1258. [Google Scholar]
- Marinos, V. Tunnel behaviour and support associated with the weak rock masses of flysch. J. Rock Mech. Geotech. Eng. 2014, 6, 227–239. [Google Scholar] [CrossRef] [Green Version]
- Gomez-Gutierrez, A.; Goncalves, G.R. Surveying coastal cliffs using two UAV platforms (multirotor and fixed-wing) and three different approaches for the estimation of volumetric changes. Int. J. Remote Sens. 2020, 41, 8143–8175. [Google Scholar] [CrossRef]
- Barlow, J.; Gilham, J.; Ibarra Cofra, I. Kinematic analysis of sea cliff stability using UAV photogrammetry. Int. J. Remote Sens. 2017, 38, 2464–2479. [Google Scholar] [CrossRef]
- Mancini, F.; Castagnetti, C.; Rossi, P.; Dubbini, M. An Integrated Procedure to Assess the Stability of Coastal Rocky Cliffs: From UAV Close-Range Photogrammetry to Geomechanical Finite Element Modeling. Remote Sens. 2017, 12, 1235. [Google Scholar] [CrossRef] [Green Version]
- Riddick, S.N.; Schmidt, D.A.; Deligne, N.I. An analysis of terrain properties and the location of surface scatterers from persistent scatterer interferometry. ISPRS J. Photogramm. Remote Sens. 2012, 73, 50–57. [Google Scholar] [CrossRef]
- Wasowski, J.; Bovenga, F. Investigating landslides and unstable slopes with satellite Multi Temporal Interferometry: Current issues and future perspectives. Eng. Geol. 2014, 174, 103–138. [Google Scholar] [CrossRef]
- Li, W.; Zhan, W.; Lu, H.; Xu, Q.; Pei, X.; Wang, D.; Huang, R.; Ge, D. Precursors to large rockslides visible on optical remote-sensing images and their implications for landslide early detection. Landslides 2022. [Google Scholar] [CrossRef]
- Corradetti, A.; Seers, T.; Mercuri, M.; Calligaris, C.; Busetti, A.; Zini, L. Benchmarking Different SfM-MVS Photogrammetric and iOS LiDAR Acquisition Methods for the Digital Preservation of a Short-Lived Excavation: A Case Study from an Area of Sinkhole Related Subsidence. Remote Sens. 2022, 14, 5187. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight [kg] | Size [mm] | Max Speed [km/h] | Flight Time [min] | Sensor Size [mm] | Effective Focal Length [mm] |
|---|---|---|---|---|---|
| 0.300 | 143 × 143 × 55 | 50 | ~15 | 6.17 × 4.56 (3968 × 2976 pixels) | 4.4 |
| Outcrop | Flight Time [min] | Maximum Flight Height [m] | Number of Pictures | Average Overlap Value [%] | Average Ground Resolution [mm/Pixels] |
|---|---|---|---|---|---|
| A1 | ~3 | 3.9 | 86 | 71.95 | 3.68 |
| A2 | ~3 | 9.0 | 91 | 72.43 | 5.69 |
| B2 | ~4 | 11.0 | 103 | 71.09 | 5.19 |
| C1 | ~3 | 7.5 | 80 | 73.29 | 6.30 |
| D2 | ~2 | 16.6 | 68 | 68.97 | 6.75 |
| E1 | ~5 | 7.0 | 96 | 79.07 | 5.28 |
| E2 | ~4 | 4.5 | 104 | 72.44 | 3.92 |
| F | ~3 | 9.6 | 78 | 74.59 | 6.47 |
| Weight [kg] | Size [mm] | Time of Acquisition [min] | Camera Sensor | Focal Length [mm] |
|---|---|---|---|---|
| 0.226 | 160.8 × 78.1 × 7.4 | ~3 | 1/3.4″ | 2.2 |
| Outcrop | Survey Time [min] | Number of Pictures | Average Overlap Value [%] | Average Ground Resolution [mm/Pixels] |
|---|---|---|---|---|
| A1 | ~5 | 64 | 72.35 | 0.646 |
| B2 | ~6 | 65 | 75.47 | 1.16 |
| C1 | ~8 | 116 | 80.34 | 0.79 |
| D2 | ~12 | 213 | 73.19 | 1.09 |
| E2 | ~10 | 139 | 83.33 | 0.84 |
| F2 | ~15 | 96 | 83.34 | 0.84 |
| Joint Set | Joint Type | Dip Direction [N°E] Mean ± St. Dev. | Dip [°] Mean ± St. Dev. |
|---|---|---|---|
| ST | bedding | 032 ± 07 | 09 ± 07 |
| J1 | fracture | 044 ± 10 | 90 ± 05 |
| J2 | fracture | 145 ± 11 | 88 ± 05 |
| J3 | fracture | 089 ± 07 | 87 ± 04 |
| J4 | fracture | 248 ± 09 | 85 ± 08 |
| J5 | fracture | 192 ± 03 | 75 ± 04 |
| J6 | fracture | 348 ± 04 | 86 ± 04 |
| Outcrop | Sparse Point Cloud | Dense Point Cloud | 3D Model Faces |
|---|---|---|---|
| A1 | 18,688 | 1,667,902 | 849,333 |
| A2 | 18,913 | 1,639,766 | 699,800 |
| B2 | 15,328 | 1,338,762 | 651,435 |
| C1 | 18,036 | 1,212,275 | 595,451 |
| D2 | 20,940 | 1,207,887 | 673,105 |
| E1 | 22,170 | 1,388,306 | 769,860 |
| E2 | 27,298 | 1,984,823 | 985,839 |
| F | 25,960 | 1,582,754 | 767,111 |
| Outcrop | Sparse Point Cloud | Dense Point Cloud | 3D Model Faces | Maximum Height [m] | Maximum Width [m] |
|---|---|---|---|---|---|
| A1 | 77,514 | 2,542,852 | 155,223 | 3.67 | 6.06 |
| B2 | 80,307 | 2,517,380 | 134,762 | 6.95 | 17.3 |
| C1 | 149,604 | 4,675,696 | 231,890 | 5.89 | 18.8 |
| D2 | 202,577 | 4,979,530 | 335,951 | 9.94 | 32.6 |
| E2 | 159,419 | 5,010,971 | 315,144 | 11.1 | 38.2 |
| F | 12,748 | 683,949 | 29,564 | 3.26 | 5.98 |
| Joint Set | Extracted Joints | Measured Joints |
|---|---|---|
| Dip Direction/Dip [°/°] | Dip Direction/Dip [°/°] | |
| ST | 225/04 | 032/09 |
| J1 | 213/90 | 044/90 |
| J2 | 135/90 | 145/88 |
| J3 | 271/90 | 089/87 |
| J4 | 069/90 | 248/85 |
| J5 | 181/90 | 192/75 |
| J6 | Not detected | 348/86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Furlani, S.; Bolla, A.; Hastewell, L.; Mantovani, M.; Devoto, S. Integrated Geomechanical and Digital Photogrammetric Survey in the Study of Slope Instability Processes of a Flysch Sea Cliff (Debeli Rtič Promontory, Slovenia). Land 2022, 11, 2255. https://doi.org/10.3390/land11122255
Furlani S, Bolla A, Hastewell L, Mantovani M, Devoto S. Integrated Geomechanical and Digital Photogrammetric Survey in the Study of Slope Instability Processes of a Flysch Sea Cliff (Debeli Rtič Promontory, Slovenia). Land. 2022; 11(12):2255. https://doi.org/10.3390/land11122255
Chicago/Turabian StyleFurlani, Stefano, Alberto Bolla, Linley Hastewell, Matteo Mantovani, and Stefano Devoto. 2022. "Integrated Geomechanical and Digital Photogrammetric Survey in the Study of Slope Instability Processes of a Flysch Sea Cliff (Debeli Rtič Promontory, Slovenia)" Land 11, no. 12: 2255. https://doi.org/10.3390/land11122255