
Detection of Archaeological Surface Ceramics Using Deep Learning Image-Based Methods and Very High-Resolution UAV Imageries


Abstract
:1. Introduction
2. Case Studies and Methodology
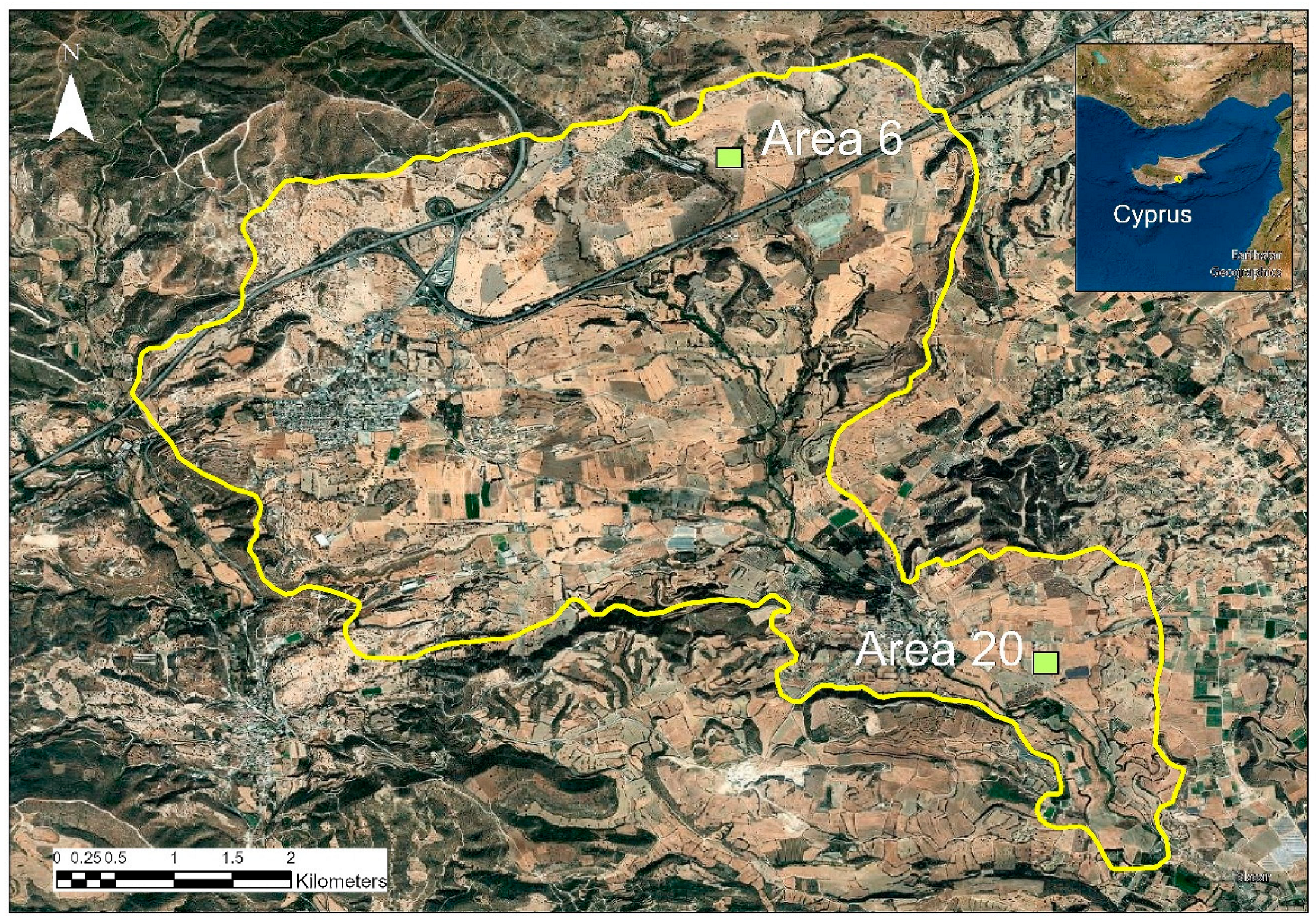
2.1. Case-Study Areas
2.2. Methodology
3. Results
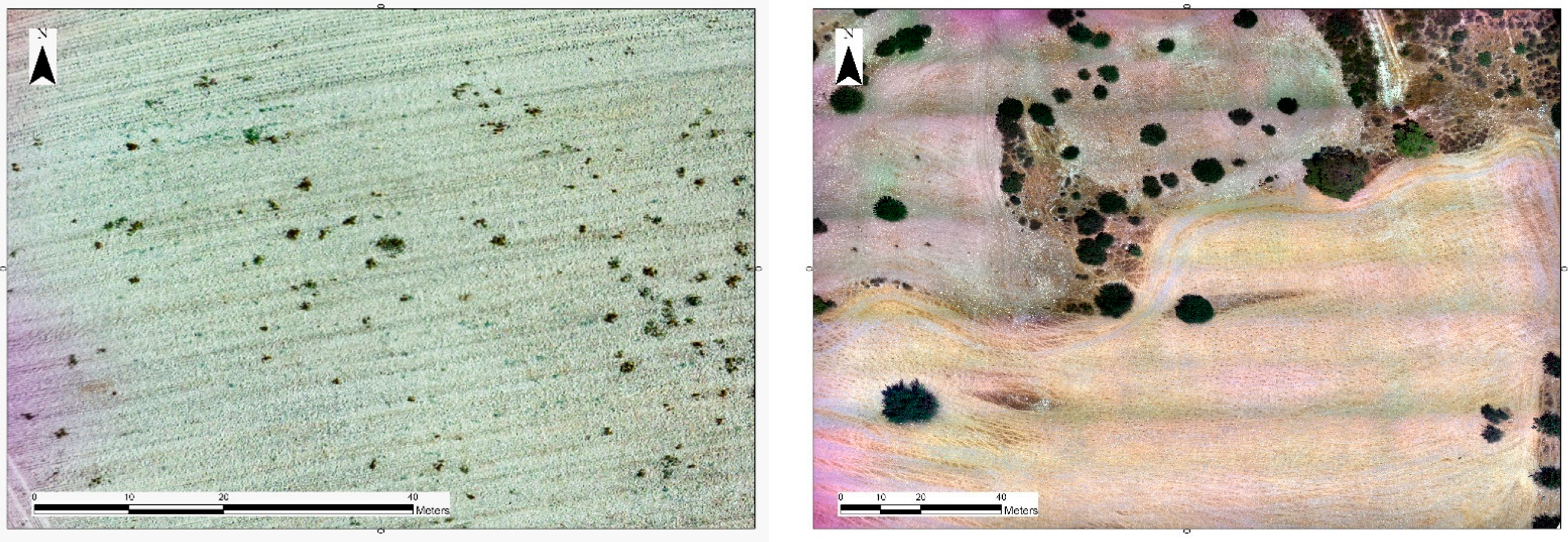
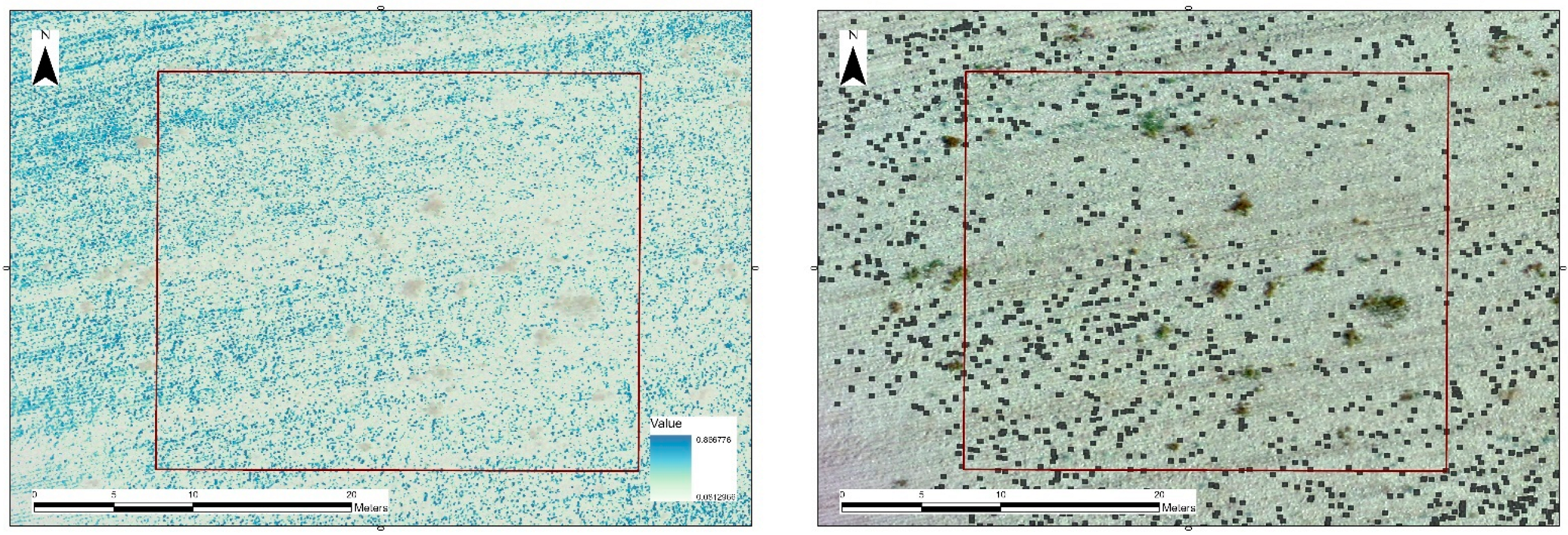
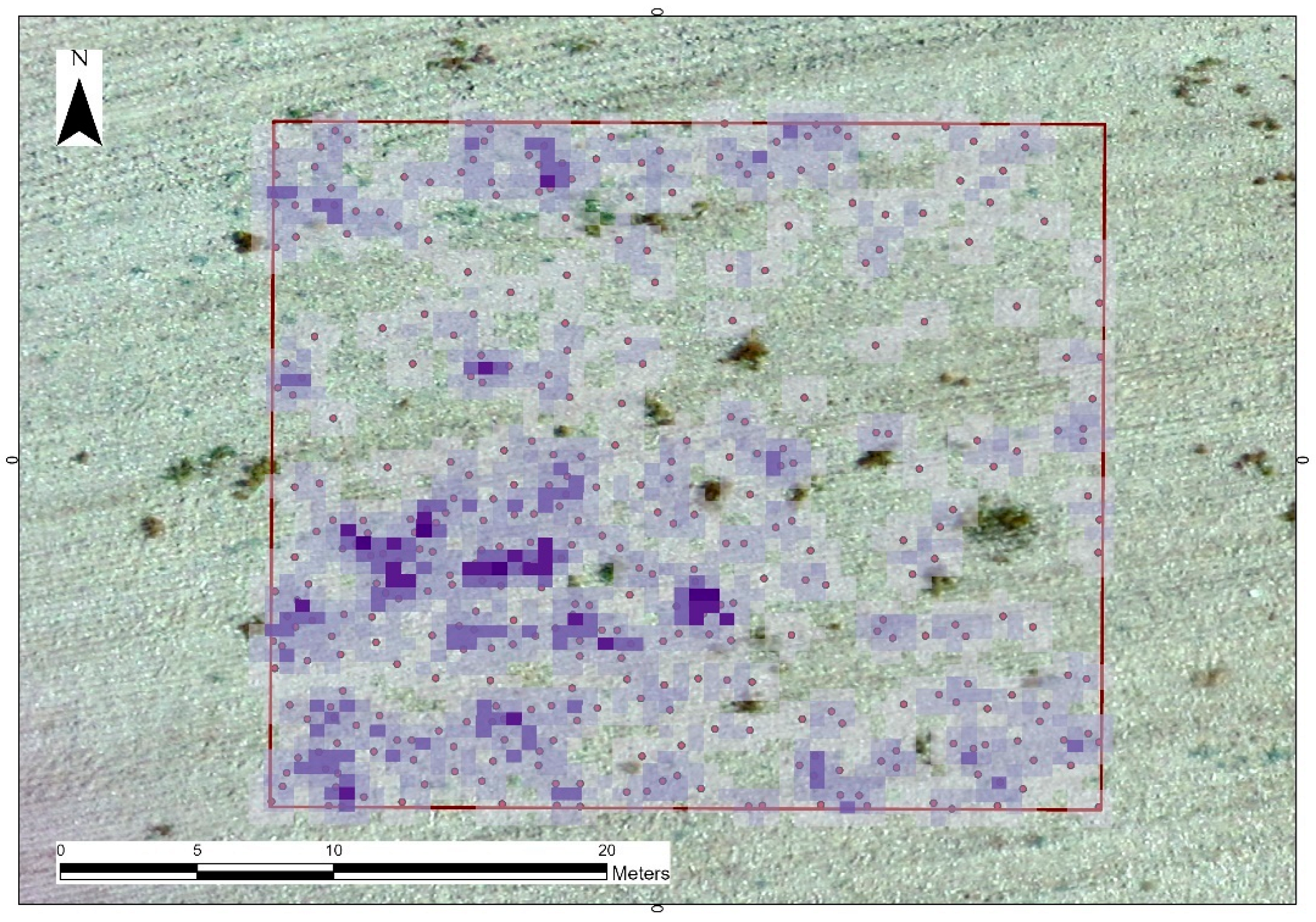
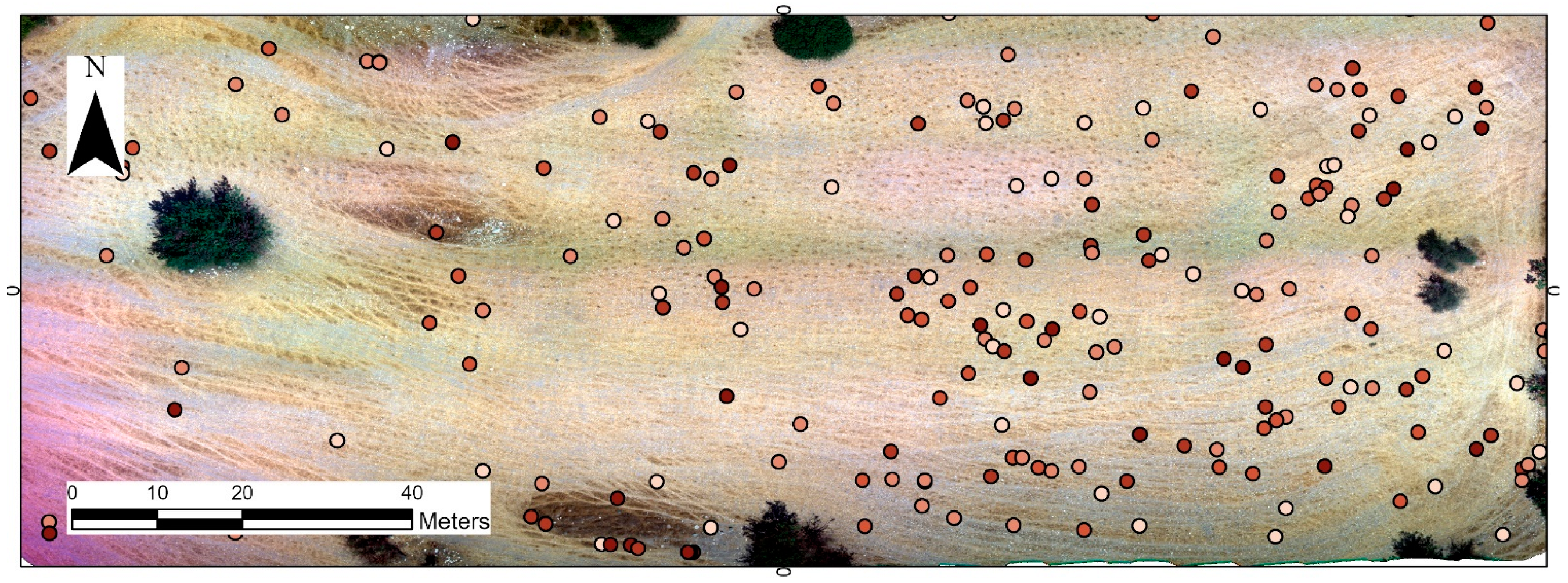
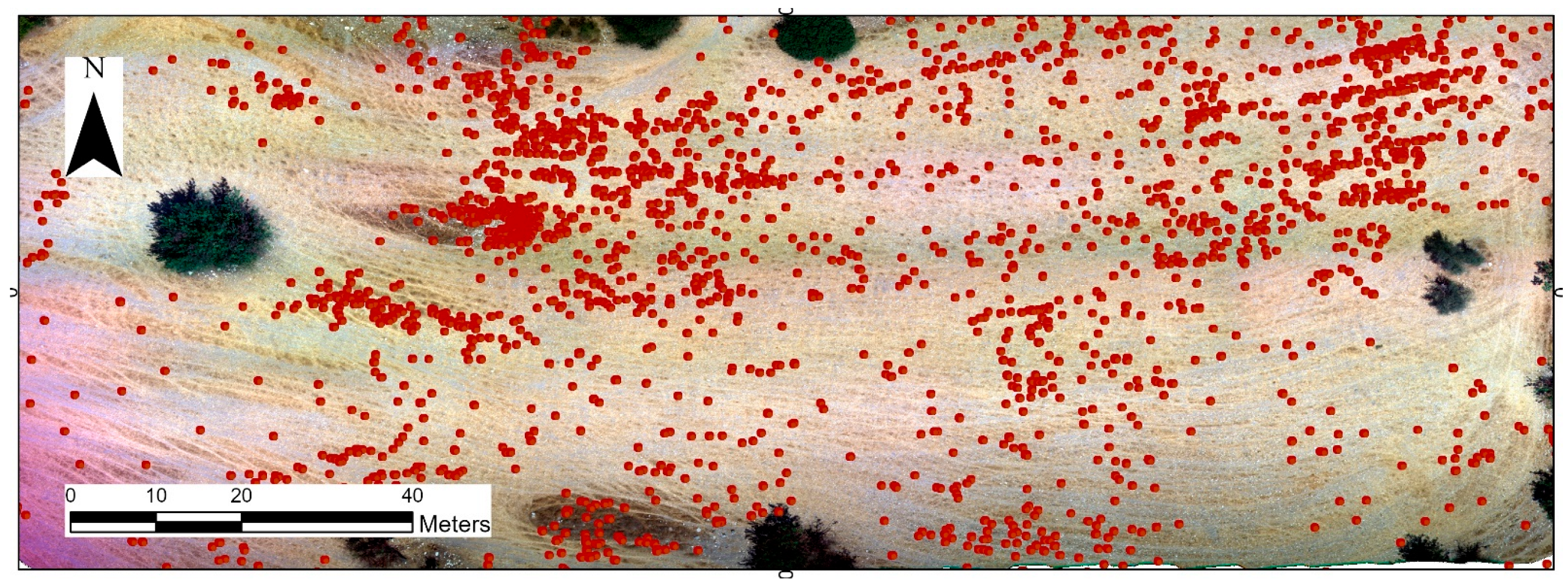
3.1. Detection of Potsherds in RGB High-Resolution Mosaic (Area 20)
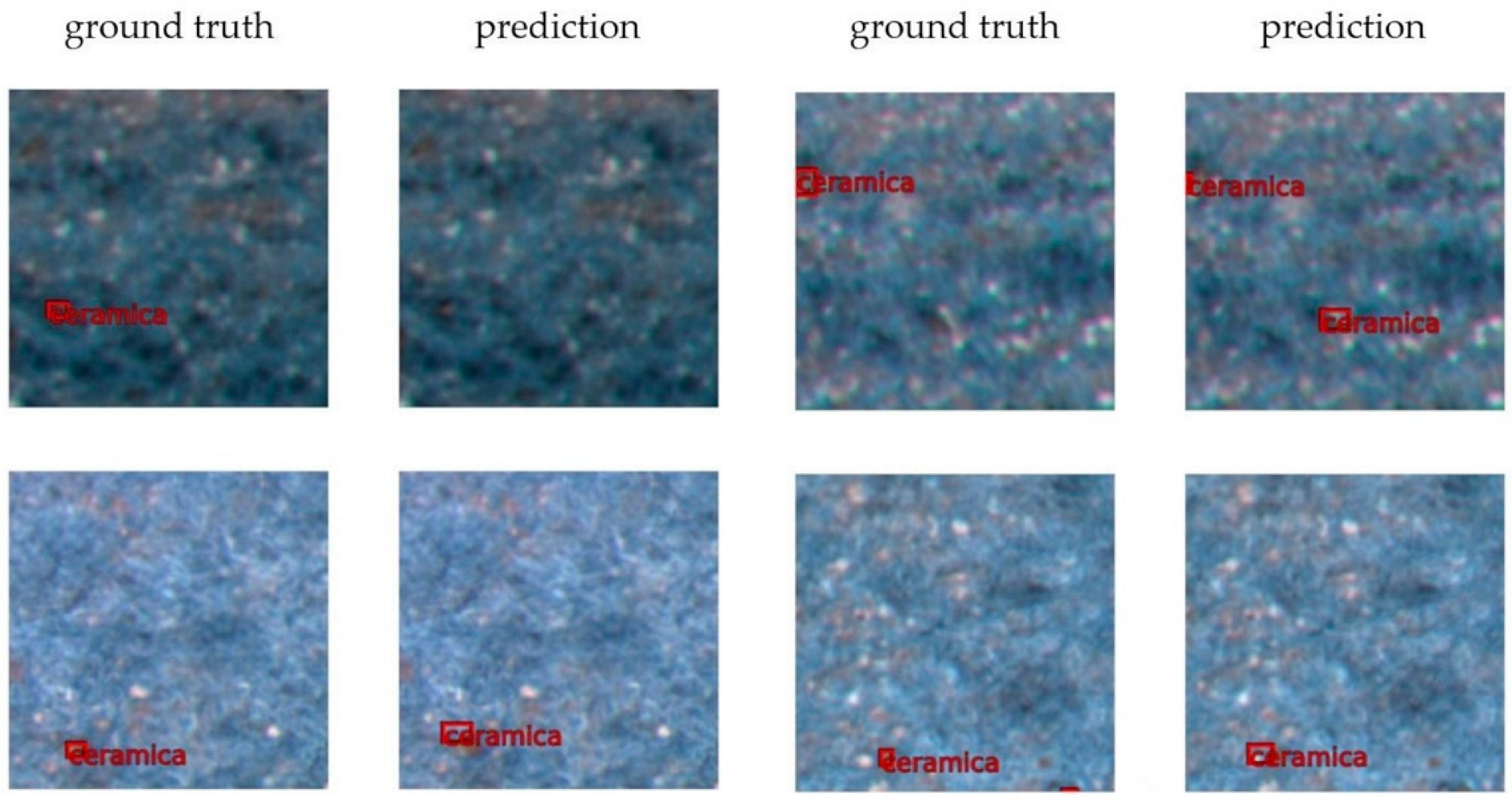
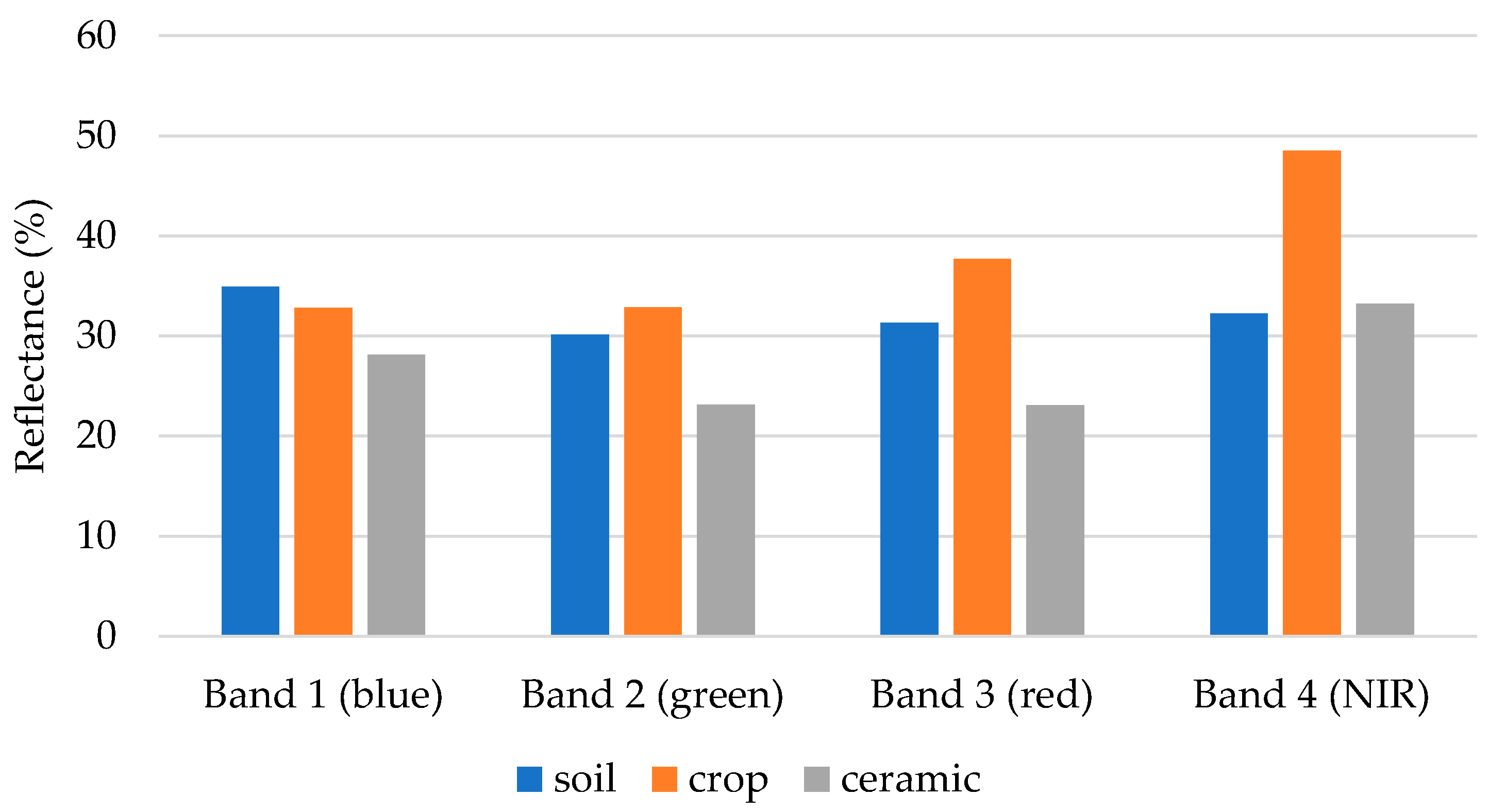
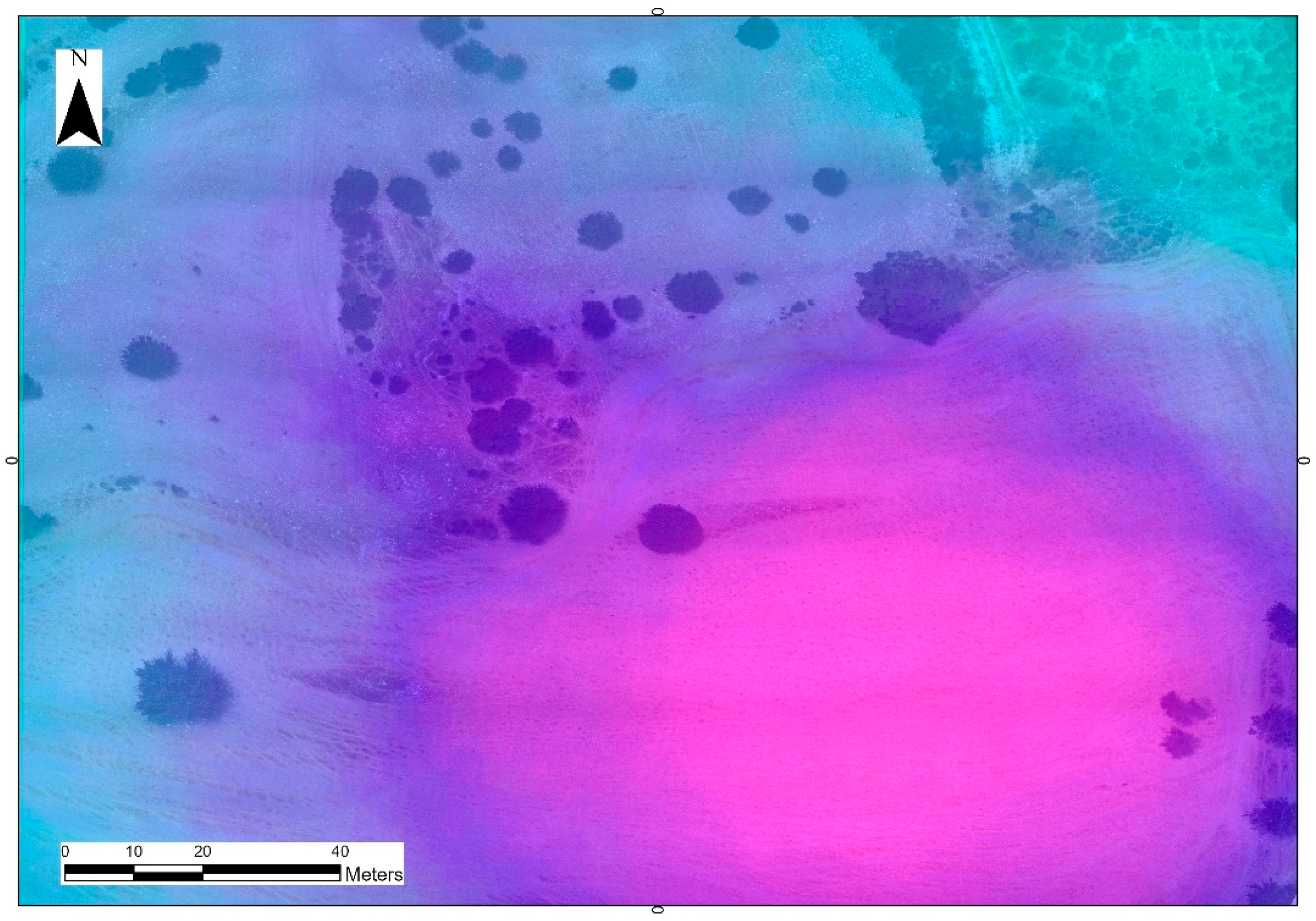
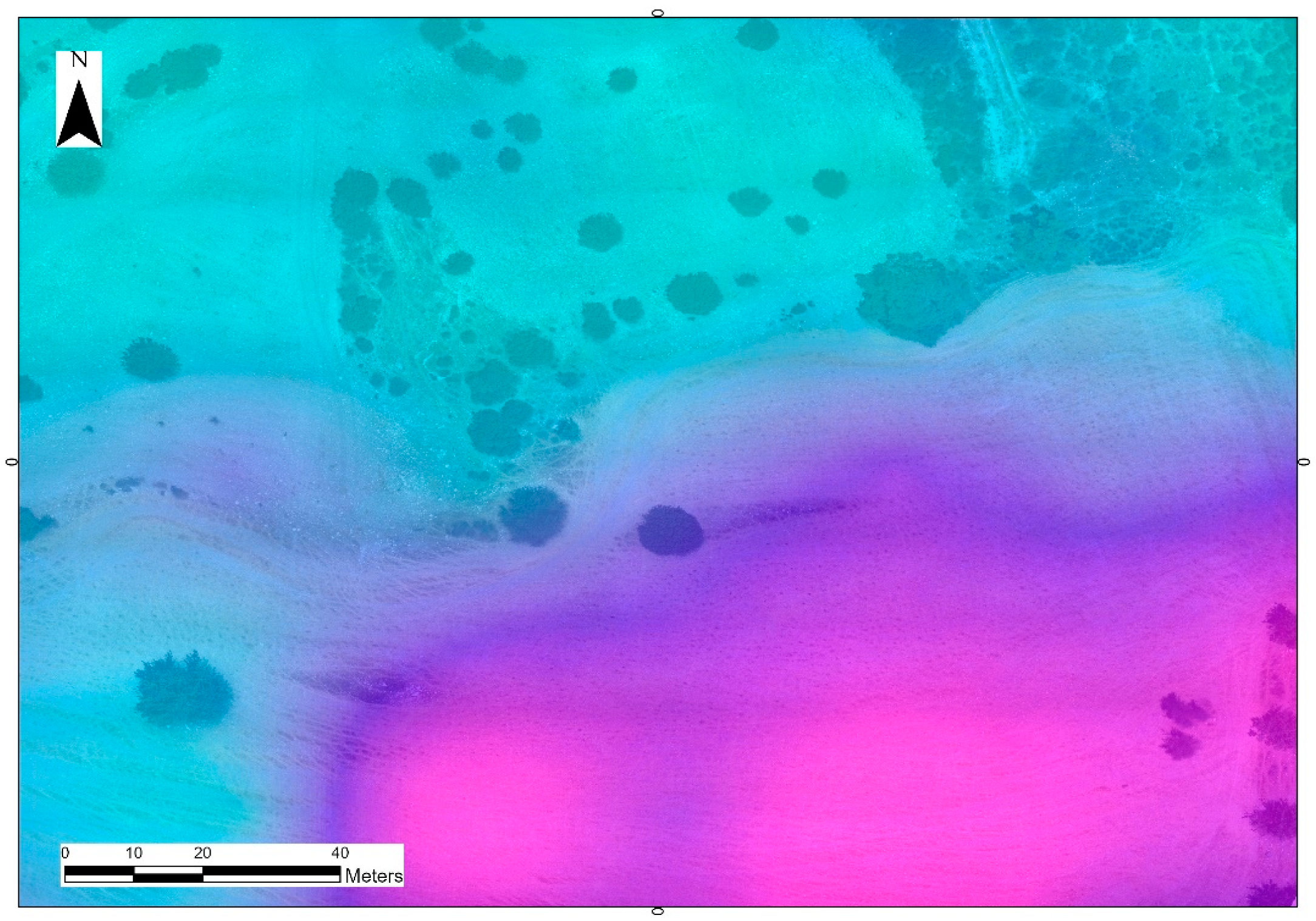
3.2. Detection of Potsherds in High-Resolution Multispectral Mosaic (Area 6)
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- Renfrew, C.; Bahn, P. Archaeology: Theories, Methods and Practice; Thames and Hudson: London, UK, 1991. [Google Scholar]
- Attema, P.; Bintliff, J.; van Leusen, M.; Bes, P.; de Haas, T.; Donev, D.; Jongman, W.; Kaptijn, E.; Mayoral, V.; Menchelli, S.; et al. A guide to good practice in Mediterranean surface survey projects. J. Greek Archaeol. 2020, 5, 1–62. [Google Scholar] [CrossRef]
- Fitzsimmons, E.K.; Stern, N.; Murray-Wallace, V.K. Depositional history and archaeology of the central Lake Mungo lunette, Willandra Lakes, southeast Australia. J. Archaeol. Sci. 2014, 41, 349–364. [Google Scholar] [CrossRef] [Green Version]
- Papantoniou, G.; Vionis, A.K. The river as an economic asset: Settlement and society in the Xeros valley in Cyprus. Land 2018, 7, 157. [Google Scholar] [CrossRef] [Green Version]
- Papantoniou, G.; Vionis, A.K. Landscape archaeology and sacred space in the Eastern Mediterranean: A glimpse from Cyprus. Land 2017, 6, 40. [Google Scholar] [CrossRef] [Green Version]
- Given, M.; Knapp, A.B.; Meyer, N.; Gregory, E.T.; Kassianidou, V.; Noller, S.J.; Wells, L.; Urwin, N.; Wright, H. The Sydney Cyprus Survey Project: An interdisciplinary investigation of long-term change in the north central Troodos, Cyprus. J. Field Archaeol. 1999, 26, 19–39. [Google Scholar]
- Bintliff, J.L. Beyond dots on the map: Future directions for surface artefact survey in Greece. In The Future of Surface Artefact Survey in Europe; Kuna, M., Venclová, N., Eds.; Sheffield Archaeological Monographs 13; Sheffield Academic Press: Sheffield, UK, 2000; pp. 3–20. [Google Scholar]
- Bintliff, J.L. Intra-site artefact surveys. In Good Practice in Archaeological Diagnostics: Non-Invasive Survey of Complex Archaeological Sites; Corsi, C., Slapšak, B., Vermeulen, F., Eds.; Springer International Publishing: Cham, Switzerland, 2013; pp. 193–207. [Google Scholar] [CrossRef]
- Alcock, S.E.; Cherry, J.F. Introduction. In Side-by-Side Survey: Comparative Regional Studies in the Mediterranean World; Alcock, S.E., Cherry, J.F., Eds.; Oxbow: Oxford, UK, 2004; pp. 1–9. [Google Scholar]
- Mayoral, V.; Barrera, F.B.; Barrera, C.B.; del Pozo, J.Á.M.; de Tena, M. The evolution of an agrarian landscape: Methodological proposals for the archaeological study of the alluvial plain of Medellin (Guadiana basin, Spain). In Landscape Archaeology between Art and Science; Kluiving, S.J., Guttmann-Bond, E., Eds.; Amsterdam University Press: Amsterdam, The Netherlands, 2018; pp. 97–114. [Google Scholar] [CrossRef]
- De Neef, W.; Armstrong, K.; van Leusen, M. Putting the spotlight on small Metal Age pottery scatters in northern Calabria (Italy). J. Field Archaeol. 2017, 42, 283–297. [Google Scholar] [CrossRef] [Green Version]
- Bintliff, J.L.; Howard, P.; Snodgrass, A.M. (Eds.) Testing the Hinterland. The Work of the Boeotia Survey (1989–1991) in the Southern Approaches to the City of Thespiai; McDonald Institute: Cambridge, UK, 2007. [Google Scholar]
- Bevan, A.; Connelly, J. Mediterranean Islands, Fragile Communities and Persistent Landscapes. Antikythera in Long-Term Perspective; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Given, M.; Knapp, A.B.; Noller, J.; Sollars, L.; Kassianidou, V. (Eds.) Landscape and Interaction. The Troodos Archaeological and Environmental Survey Project, Cyprus. Volume 1: The TAESP Landscape; Oxbow: Oxford, UK, 2013. [Google Scholar]
- Caraher, W.R.; Moore, R.S.; Pettegrew, D.K. Pyla-Koutsopetria I: Archaeological Survey of an Ancient Coastal Town; American Schools of Oriental Research: Boston, MA, USA, 2014. [Google Scholar]
- Orengo, H.A.; Garcia-Molsosa, A. A brave new world for archaeological survey: Automated machine learning-based potsherd detection using high-resolution drone imagery. J. Archaeol. Sci. 2019, 112, 105013. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Grussenmeyer, P.; Börlin, N.; Vandermeerschen, J.; Freville, T. Open source and independent methods for Bundle Adjustment Assessment in Close-Range UAV Photogrammetry. Drones 2018, 2, 3. [Google Scholar] [CrossRef] [Green Version]
- Pierrot-Deseilligny, M.; Clery, I. Apero, an Open Source Bundle Adjusment Software for Automatic Calibration and Orientation of Set of Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII, 269–276. [Google Scholar] [CrossRef] [Green Version]
- González-Aguilera, D.; López-Fernández, L.; Rodriguez-Gonzalvez, P.; Guerrero, D.; Hernandez-Lopez, D.; Remondino, F.; Menna, F.; Nocerino, E.; Toschi, I.; Ballabeni, A.; et al. Development of an all-purpose free photogrammetric tool. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 31–38. [Google Scholar] [CrossRef] [Green Version]
- Adamopoulos, E.; Rinaudo, F. UAS-Based Archaeological Remote Sensing: Review, meta-analysis and state-of-the-art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Megarry, W.; Graham, C.; Gilhooly, B.; O’Neill, B.; Sands, R.; Nyland, A.; Cooney, G. Debitage and drones: Classifying and characterising Neolithic stone tool production in the Shetland Islands using High Resolution Unmanned Aerial Vehicle imagery. Drones 2018, 2, 12. [Google Scholar] [CrossRef]
- Cowley, D.C.; Moriarty, C.; Geddes, G.; Brown, G.L.; Wade, T.; Nichol, C.J. UAVs in context: Archaeological airborne recording in a national body of survey and record. Drones 2018, 2, 2. [Google Scholar] [CrossRef] [Green Version]
- Abate, N.; Frisetti, A.; Marazzi, F.; Masini, N.; Lasaponara, R. Multitemporal–Multispectral UAS Surveys for Archaeological Research: The Case Study of San Vincenzo Al Volturno (Molise, Italy). Remote Sens. 2021, 13, 2719. [Google Scholar] [CrossRef]
- Bobáľ, P.; Sipina, S.; Škultéty, F. Aspects of Aerial Laser Scanning when exploring unknown archaeological sites (Case study). Transp. Res. Procedia 2017, 28, 37–44. [Google Scholar] [CrossRef]
- Waagen, J. New technology and archaeological practice. Improving the primary archaeological recording process in excavation by means of UAS photogrammetry. J. Archaeol. Sci. 2019, 101, 11–20. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle. Drones 2019, 3, 79. [Google Scholar] [CrossRef] [Green Version]
- Ronchi, D.; Limongiello, M.; Barba, S. Correlation among earthwork and cropmark anomalies within archaeological landscape investigation by using LiDAR and Multispectral Technologies from UAV. Drones 2020, 4, 72. [Google Scholar] [CrossRef]
- James, K.; Nichol, C.J.; Wade, T.; Cowley, D.; Gibson Poole, S.; Gray, A.; Gillespie, J. Thermal and Multispectral Remote Sensing for the detection and analysis of archaeologically induced crop stress at a UK site. Drones 2020, 4, 61. [Google Scholar] [CrossRef]
- Gasparini, M.; Moreno-Escribano, J.C.; Monterroso-Checa, A. Photogrammetric acquisitions in diverse archaeological contexts using drones: Background of the Ager Mellariensis Project (North of Córdoba-Spain). Drones 2020, 4, 47. [Google Scholar] [CrossRef]
- Gualandi, M.L.; Gattiglia, G.; Anichini, F. An Open System for collection and automatic recognition of pottery through Neural Network Algorithms. Heritage 2021, 4, 140–159. [Google Scholar] [CrossRef]
- Berganzo-Besga, I.; Orengo, H.A.; Lumbreras, F.; Carrero-Pazos, M.; Fonte, J.; Vilas-Estévez, B. Hybrid MSRM-Based Deep Learning and Multitemporal Sentinel 2-Based Machine Learning Algorithm Detects near 10k archaeological tumuli in North-Western Iberia. Remote Sens. 2021, 13, 4181. [Google Scholar] [CrossRef]
- Somrak, M.; Džeroski, S.; Kokalj, Ž. Learning to classify structures in ALS-Derived Visualizations of ancient Maya settlements with CNN. Remote Sens. 2020, 12, 2215. [Google Scholar] [CrossRef]
- Davis, D.S.; Gaspari, G.; Lipo, C.P.; Sanger, M.C. Deep learning reveals extent of Archaic Native American shell-ring building practices. J. Archaeol. Sci. 2021, 132, 105433. [Google Scholar] [CrossRef]
- Menze, B.H.; Ur, J.A. Mapping patterns of long-term settlement in Northern Mesopotamia at a large scale. Proc. Natl. Acad. Sci. USA 2012, 109, E778–E787. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Molsosa, A.; Orengo, H.A.; Lawrence, D.; Philip, G.; Hopper, K.; Petrie, C.A. Potential of deep learning segmentation for the extraction of archaeological features from historical map series. Archaeol. Prospect. 2021, 28, 187–199. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using deep neural networks on airborne laser scanning data: Results from a case study of semi-automatic mapping of archaeological topography on Arran, Scotland. Archaeol. Prospect. 2019, 26, 165–175. [Google Scholar] [CrossRef]
- Agapiou, A. Remote Sensing Heritage in a petabyte-scale: Satellite Data and Heritage Earth Engine© applications. Int. J. Digit. Earth 2017, 10, 85–102. [Google Scholar] [CrossRef] [Green Version]
- Orengo, H.A.; Garcia-Molsosa, A.; Berganzo-Besga, I.; Landauer, J.; Aliende, P.; Tres-Martínez, S. New developments in drone-based automated surface survey: Towards a functional and effective survey system. Archaeol. Prospect. 2021, 28, 519–526. [Google Scholar] [CrossRef]
- ArtLandS Lab—Artefact and Landscape Studies Laboratory. Available online: https://www.ucy.ac.cy/artlands/en/ (accessed on 8 November 2021).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y. SSD: Single Shot MultiBox Detector. arXiv 2016, arXiv:1512.02325. [Google Scholar]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost Precision Agriculture with Unmanned Aerial Vehicle Remote Sensing and Edge Intelligence: A survey. Remote Sens. 2021, 13, 4387. [Google Scholar] [CrossRef]
- Noviello, M.; Ciminale, M.; de Pasquale, V. Combined application of pansharpening and enhancement methods to improve archaeological cropmark visibility and identification in QuickBird imagery: Two case studies from Lucera, southern Italy. J. Archaeol. Sci. 2013, 40, 3604–3613. [Google Scholar] [CrossRef]
- Sarris, A.; Papadopoulos, N.; Agapiou, A.; Salvi, M.C.; Hadjimitsis, D.G.; Parkinson, A.; Yerkes, R.W.; Gyucha, A.; Duffy, R.P. Integration of geophysical surveys, ground hyperspectral measurements, aerial and satellite imagery for archaeological prospection of prehistoric sites: The case study of Vésztő-Mágor Tell, Hungary. J. Archaeol. Sci. 2013, 40, 1454–1470. [Google Scholar] [CrossRef]
- Agapiou, A.; Hadjimitsis, D.G.; Alexakis, D.D. Evaluation of Broadband and Narrowband Vegetation Indices for the identification of archaeological crop marks. Remote Sens. 2012, 4, 3892–3919. [Google Scholar] [CrossRef] [Green Version]
- Gallo, D.; Ciminale, M.; Becker, H.; Masini, N. Remote sensing techniques for reconstructing a vast Neolithic settlement in southern Italy. J. Archaeol. Sci. 2009, 36, 43–50. [Google Scholar] [CrossRef]
- Agapiou, A.; Lysandrou, V.; Lasaponara, R.; Masini, N.; Hadjimitsis, D.G. Study of the variations of archaeological marks at Neolithic site of Lucera, Italy using High-Resolution Multispectral Datasets. Remote Sens. 2016, 8, 723. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Foot Surveys | UAV Detection | ||
|---|---|---|---|
| Count | Prediction 1 | ||
| Area 20 | 300 | 375 | 383 |
| Area 6 | 2406 | 3007 | 300 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agapiou, A.; Vionis, A.; Papantoniou, G. Detection of Archaeological Surface Ceramics Using Deep Learning Image-Based Methods and Very High-Resolution UAV Imageries. Land 2021, 10, 1365. https://doi.org/10.3390/land10121365
Agapiou A, Vionis A, Papantoniou G. Detection of Archaeological Surface Ceramics Using Deep Learning Image-Based Methods and Very High-Resolution UAV Imageries. Land. 2021; 10(12):1365. https://doi.org/10.3390/land10121365
Chicago/Turabian StyleAgapiou, Athos, Athanasios Vionis, and Giorgos Papantoniou. 2021. "Detection of Archaeological Surface Ceramics Using Deep Learning Image-Based Methods and Very High-Resolution UAV Imageries" Land 10, no. 12: 1365. https://doi.org/10.3390/land10121365