
Method for Fast Map Construction Based on GPS Data and Compressed Grid Algorithm


Abstract
:1. Introduction
- (1)
- By coordinating the intersection of direction and distance, less data and storage space are used to express the topological relationship between nodes, thereby compressing the map size and saving the system’s running memory.
- (2)
- The way the traditional grid is described is improved by adopting a multi-dimensional coordinate design, and when resolving the overall regeneration problem of regional updating, the information capacity of the elementary grid is enlarged. After updating the local map, it can be merged to the main map to update the entire map, avoiding the unnecessary burden on the system of inputting all the data.
- (3)
- Compression and restoring can be flexibly transformed and adjusted according to how accurately the scenario describes the road, thereby achieving good expansibility and adaptability.
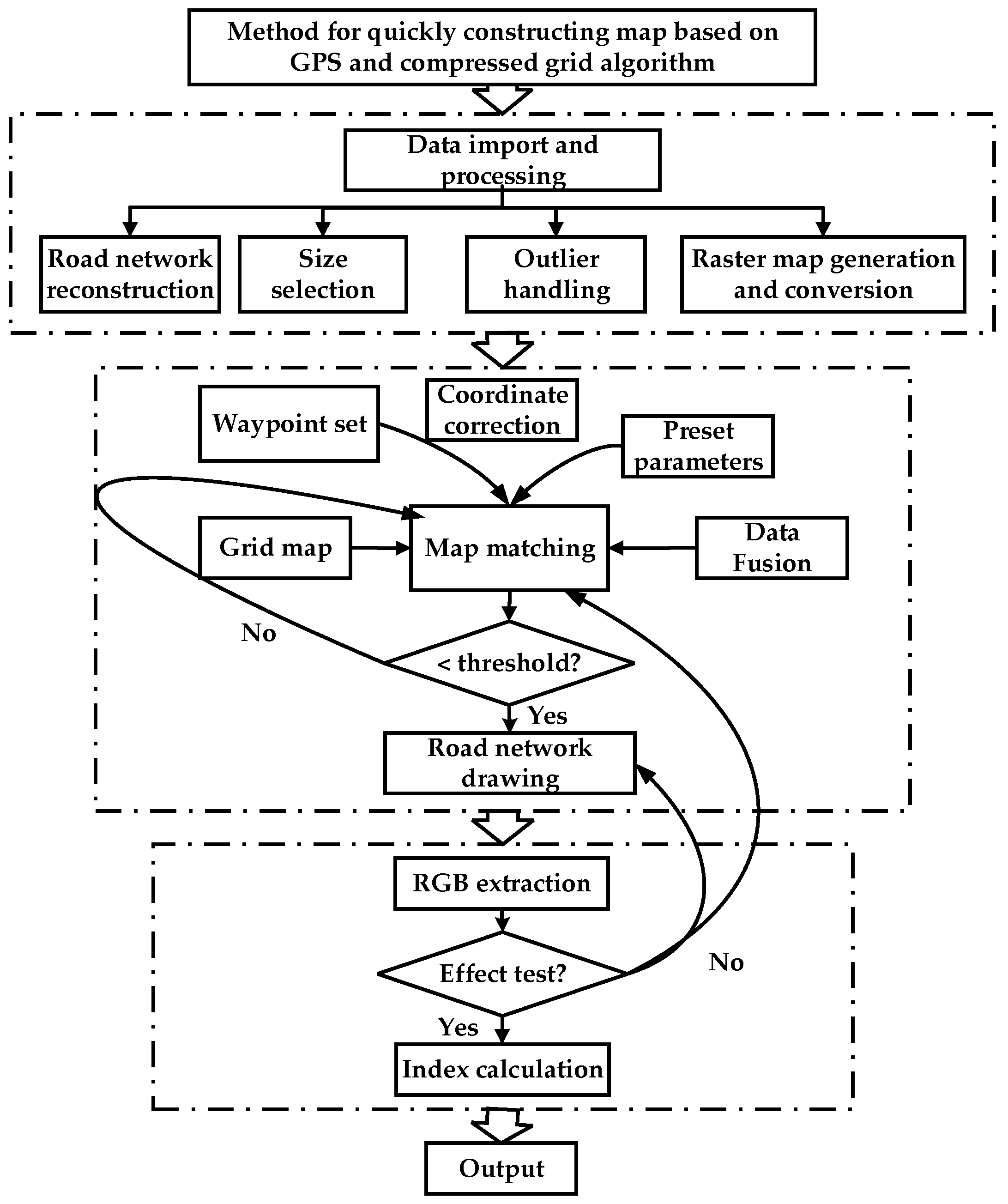
2. Materials and Methods
2.1. Model Principle and Symbol Description
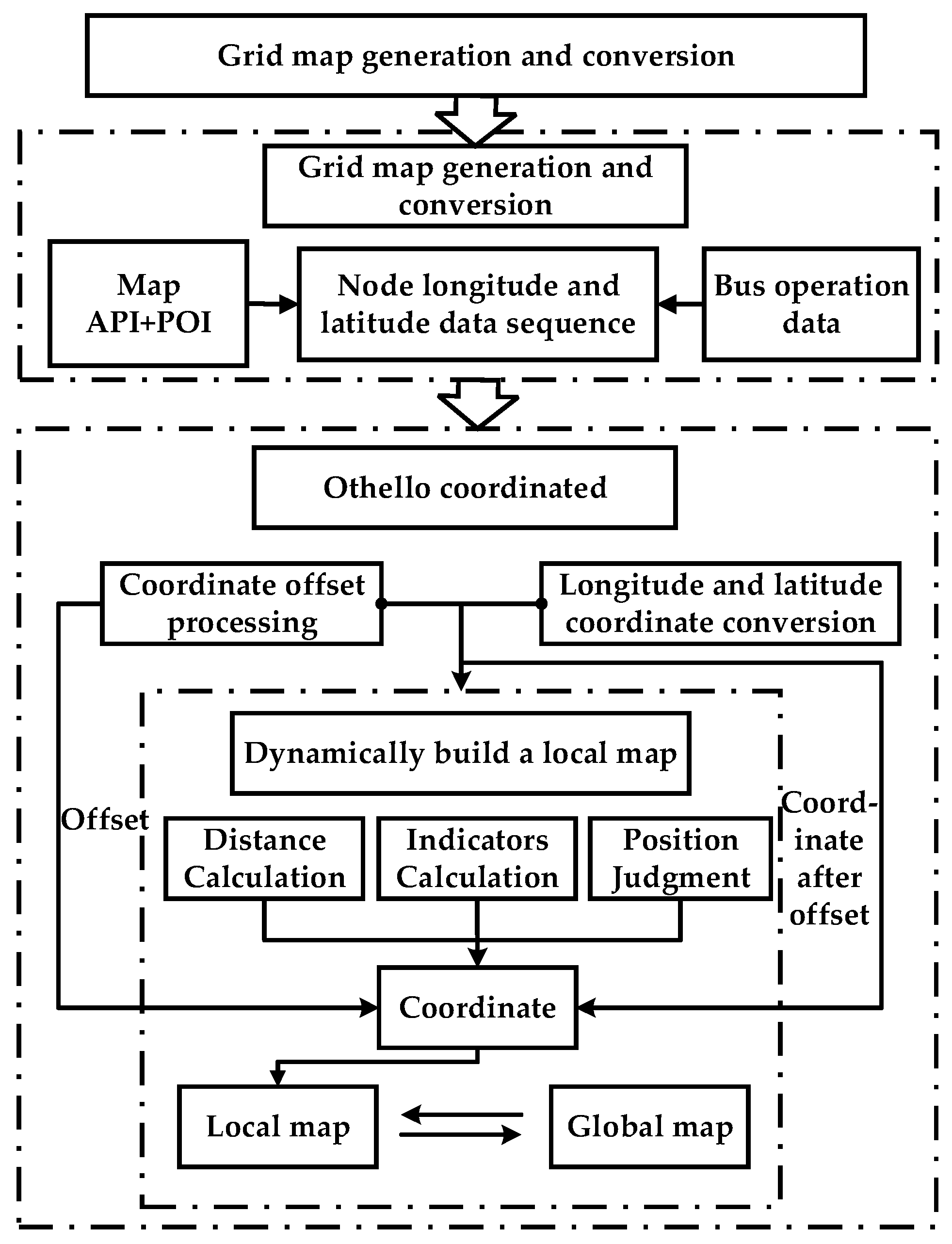
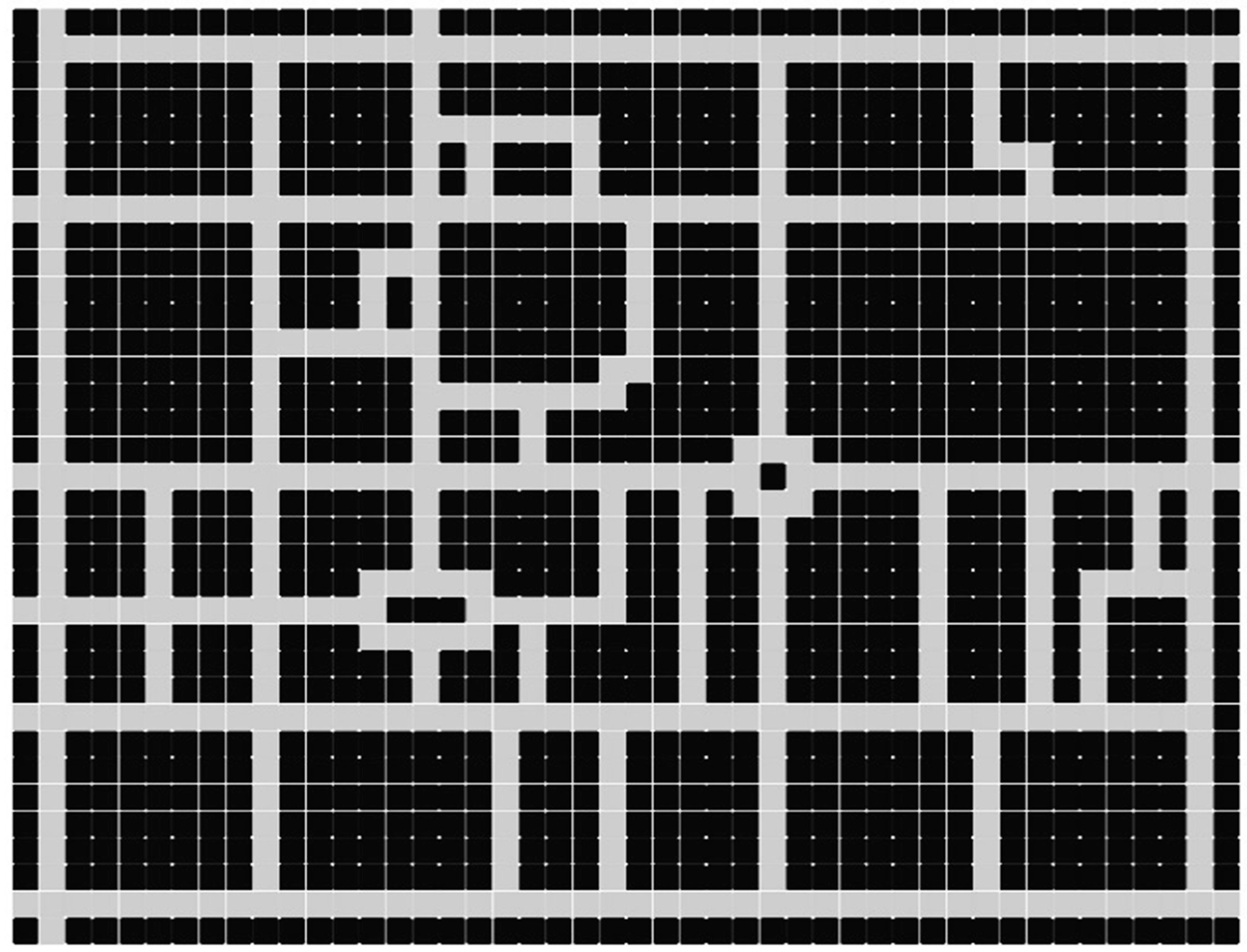
2.2. Road Network Raster Map Generation
2.2.1. Map Projection
| Algorithm 1 The Longitude and Latitude Distance Calculation Algorithm. | |
| Input: | longitude1, latitude1, longitude2, latitude2, R_Earth |
| Output: | Distance between two points |
| Begin | |
| 1 | Cov_radian = map (radians, input_points) |
| 2 | Square = sin(dis_lat/2)2 + cos(lat1) * cos(lat2) * sin(dis_lon/2)2 |
| 3 | Distance = 2*sqrt(Square) *R_Earth*1000 |
| 4 | Result = round(Distance, x) |
| 5 | return Result |
| End | |
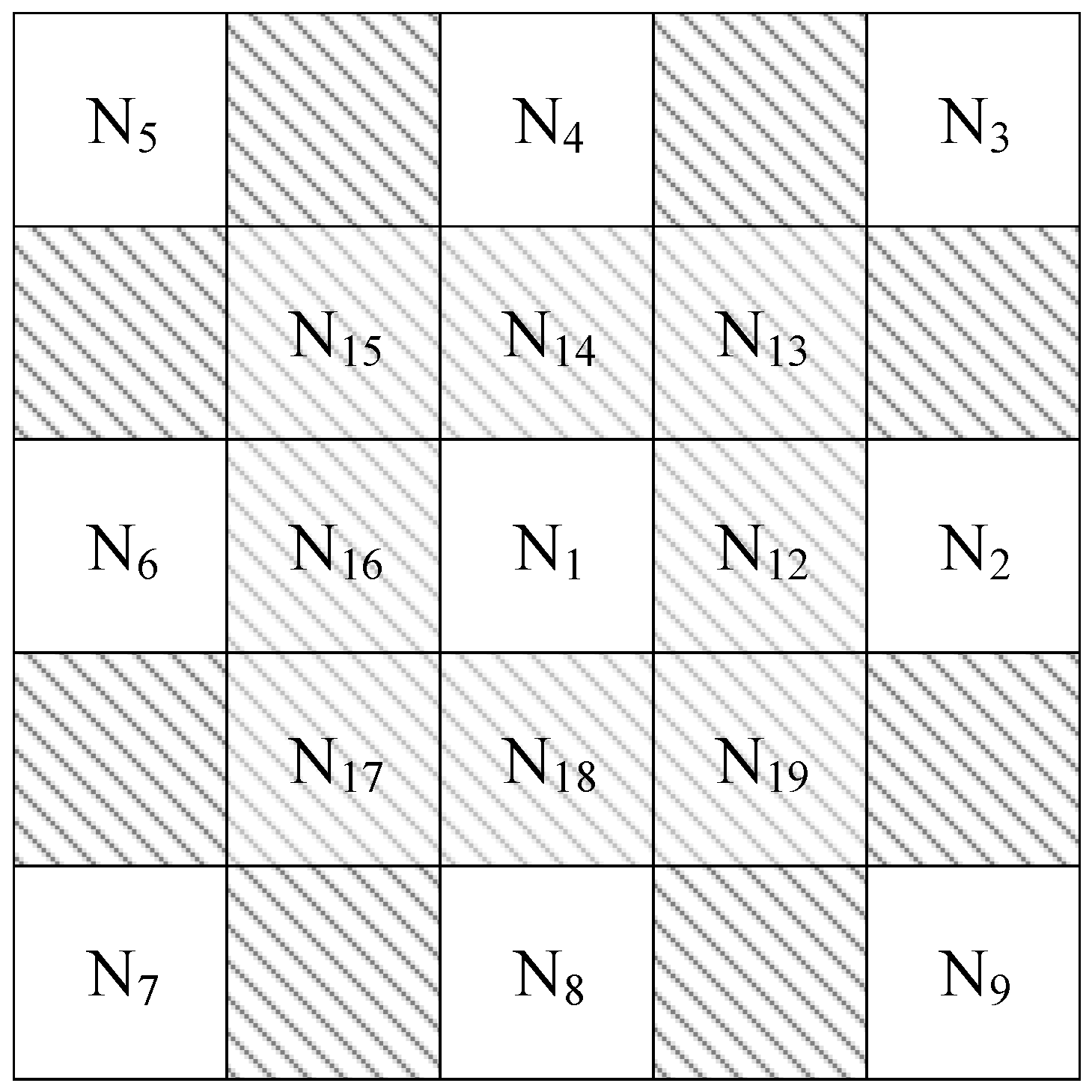
2.2.2. The Othello-Coordinated Design
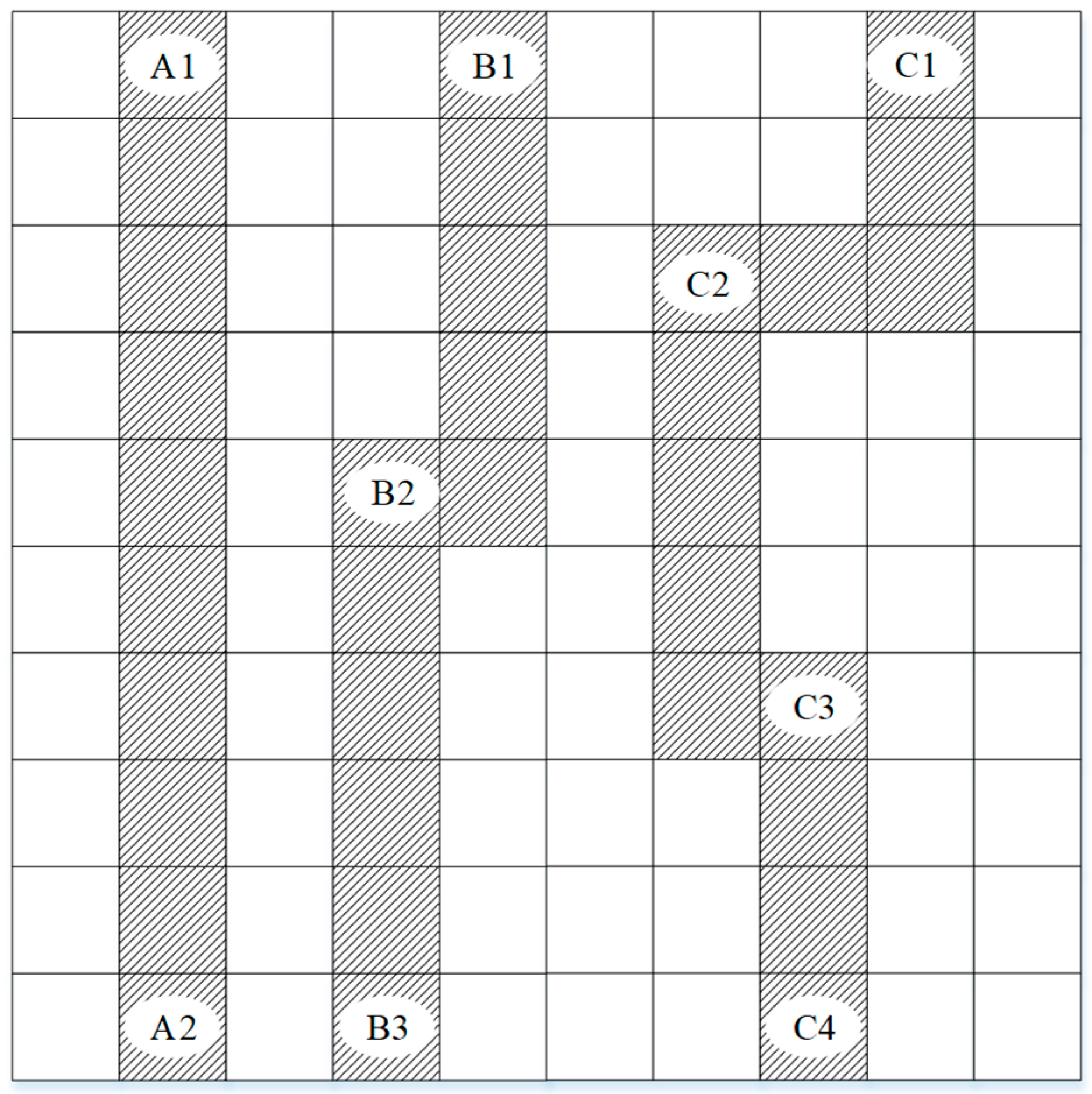
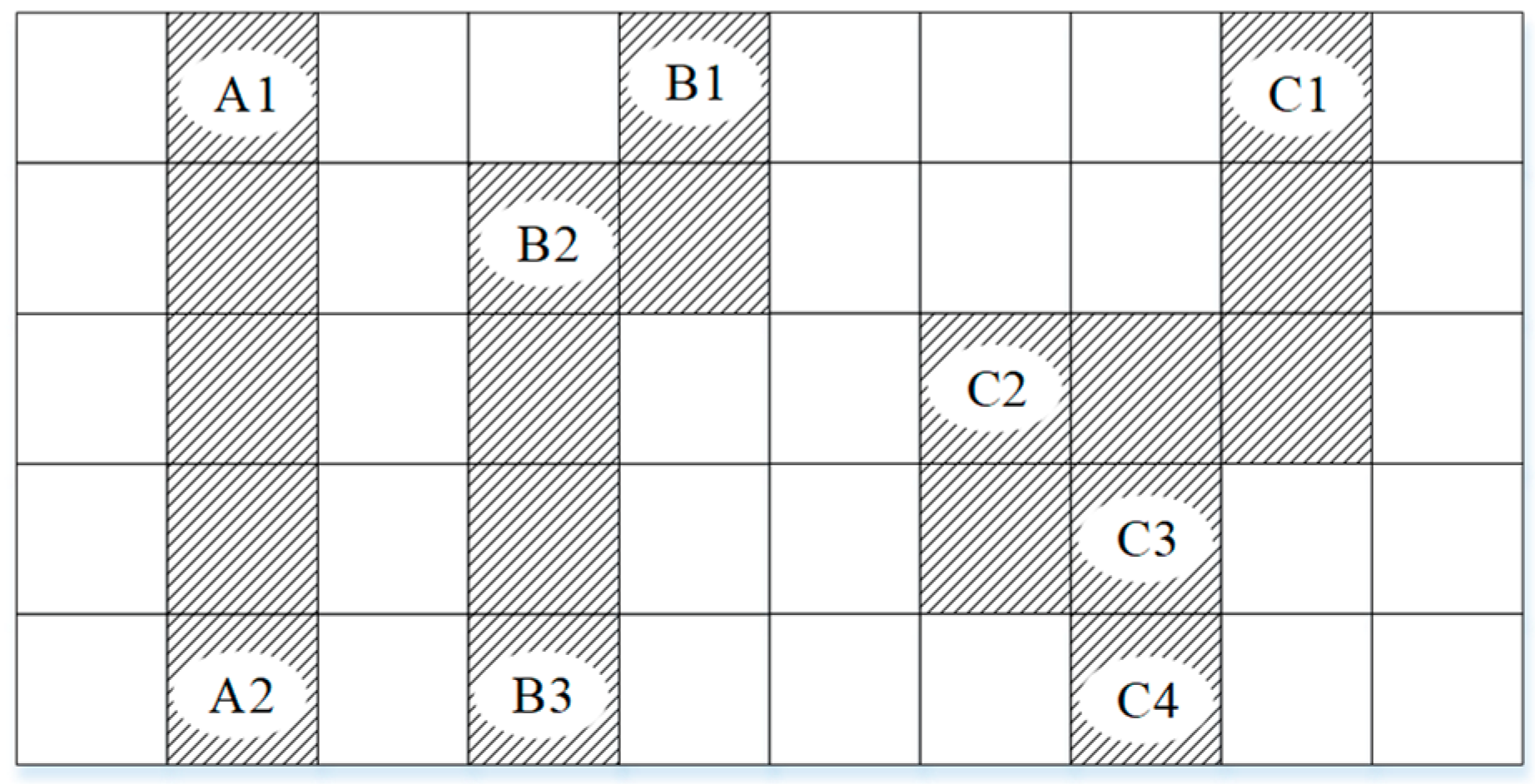
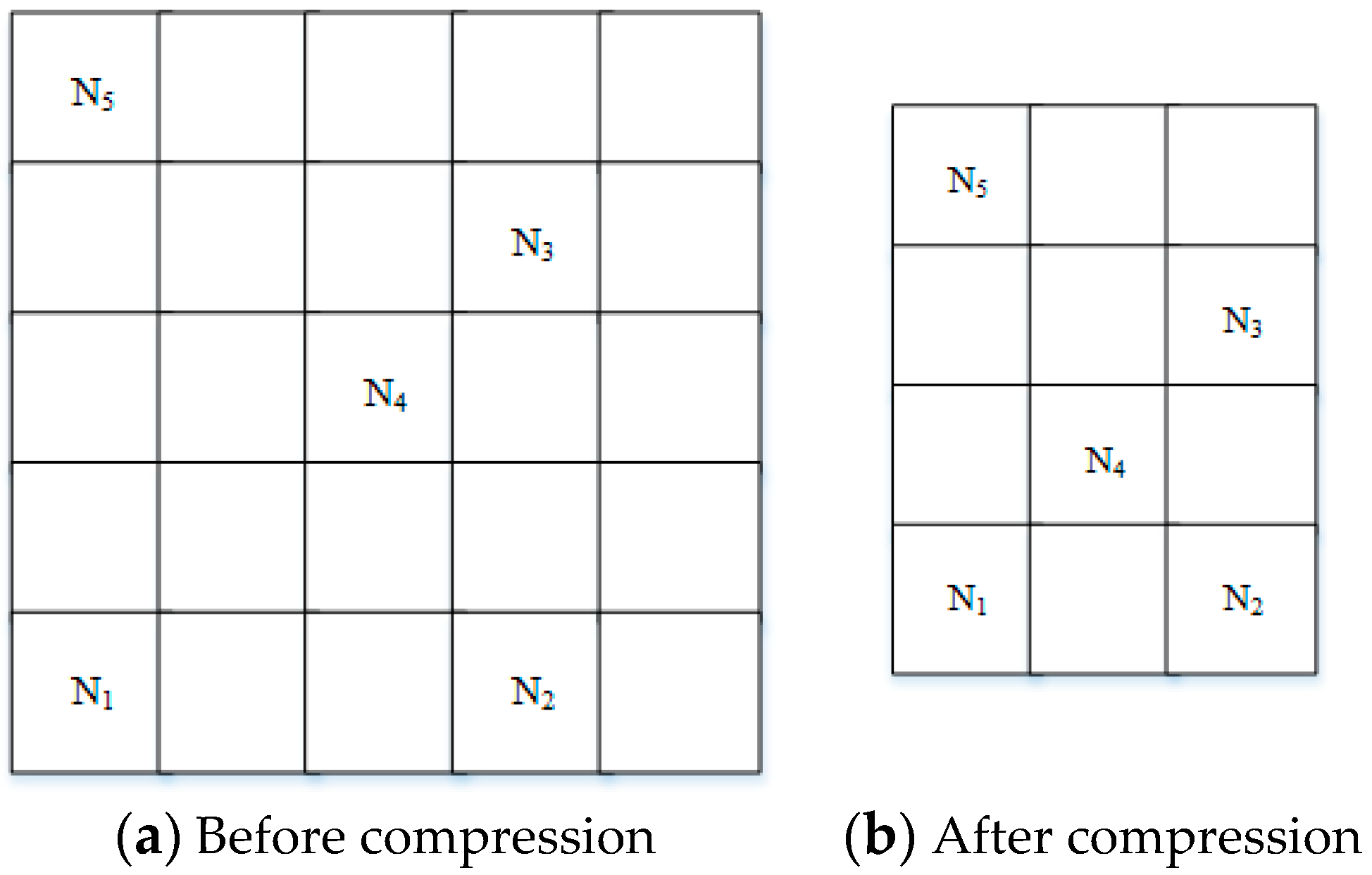
2.2.3. Map Compression and Restoration
| Algorithm 2 Map compression and coordinate processing. | |
| Input: | longitude1, latitude1, longitude2, latitude2, …, longitude_n, latitude_n, R_Earth |
| Output: | Raster map |
| Begin | |
| 1 | Cov_coo = Algorithm_1(input_points) |
| 2 | for direction in one-around_point: While not beyond borders: If another point is available: Distance = Euclidean distance Direction = direction |
| 3 | Othello_coo = (Cov_coo, Distance, Direction, …) |
| 4 | Result_map = zip(map_Othello(i,j)) |
| 5 | return Result |
| End | |
2.2.4. Map Splicing and Updating
| Algorithm 3 The Map Splicing and Updating Algorithm. | |
| Input: | Raster_map1, Raster_map2,…, Raster_map_n |
| Output: | Raster_map_new |
| Begin | |
| 1 | for i in range(n): Raster_map_i_global = unzip(Raster_map_i) for nodes in map_1 and map_i: if the same coordinate points exist: new_coo = XOR (two_points) elif one of the horizontal and vertical coordinates is the same: Deposit row or column new_coo = XOR (two_points_same_coordinate) else: new_coo = point_i Deposit row and column Temporary _map = zip(map_1*) |
| 2 | Result = combining (Temporary _map) |
| 3 | return Result |
| End | |
3. Results and Discussion
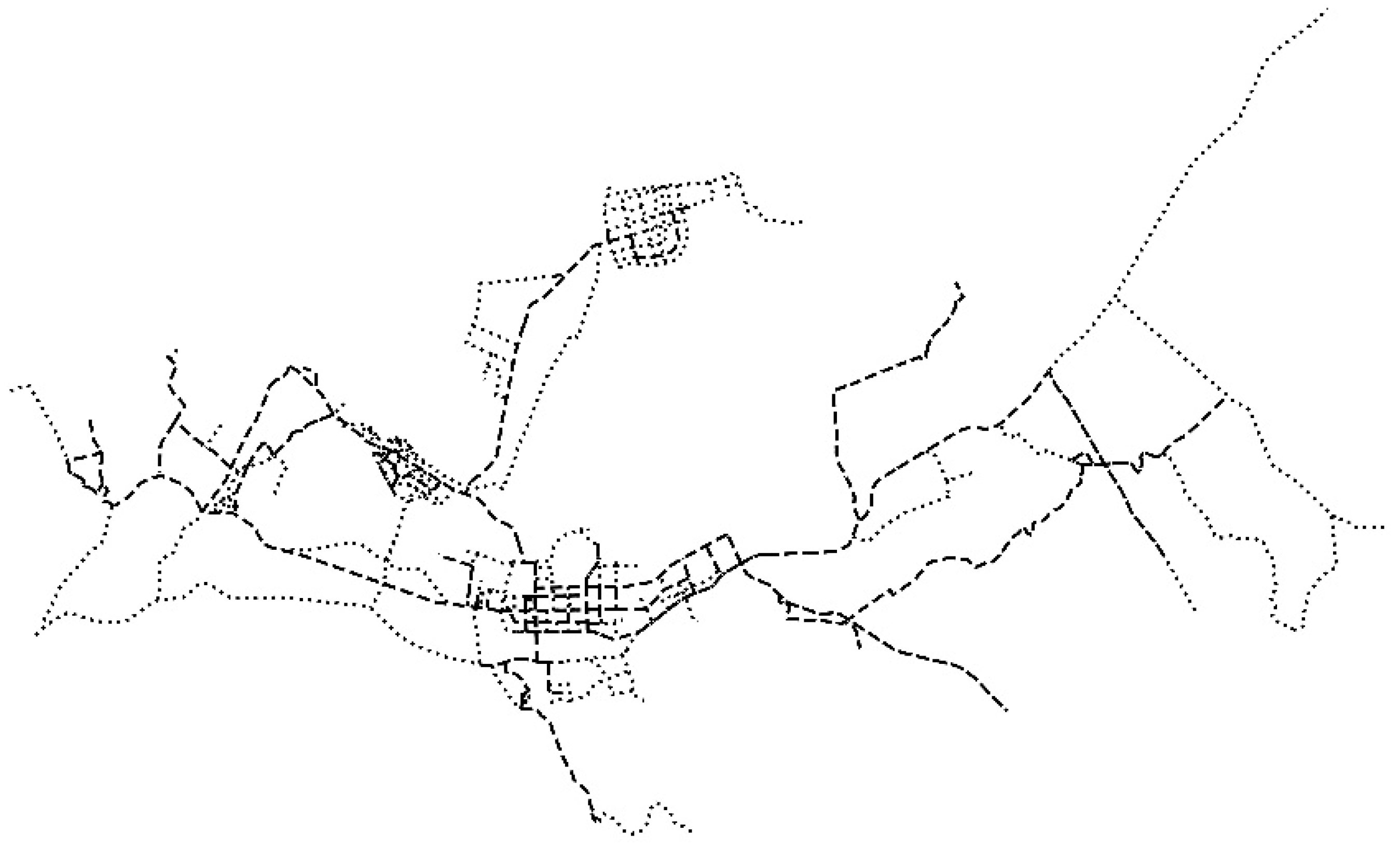
3.1. Data Source and Processing
3.2. Calculation of Public Transport Vehicle Coverage Rate
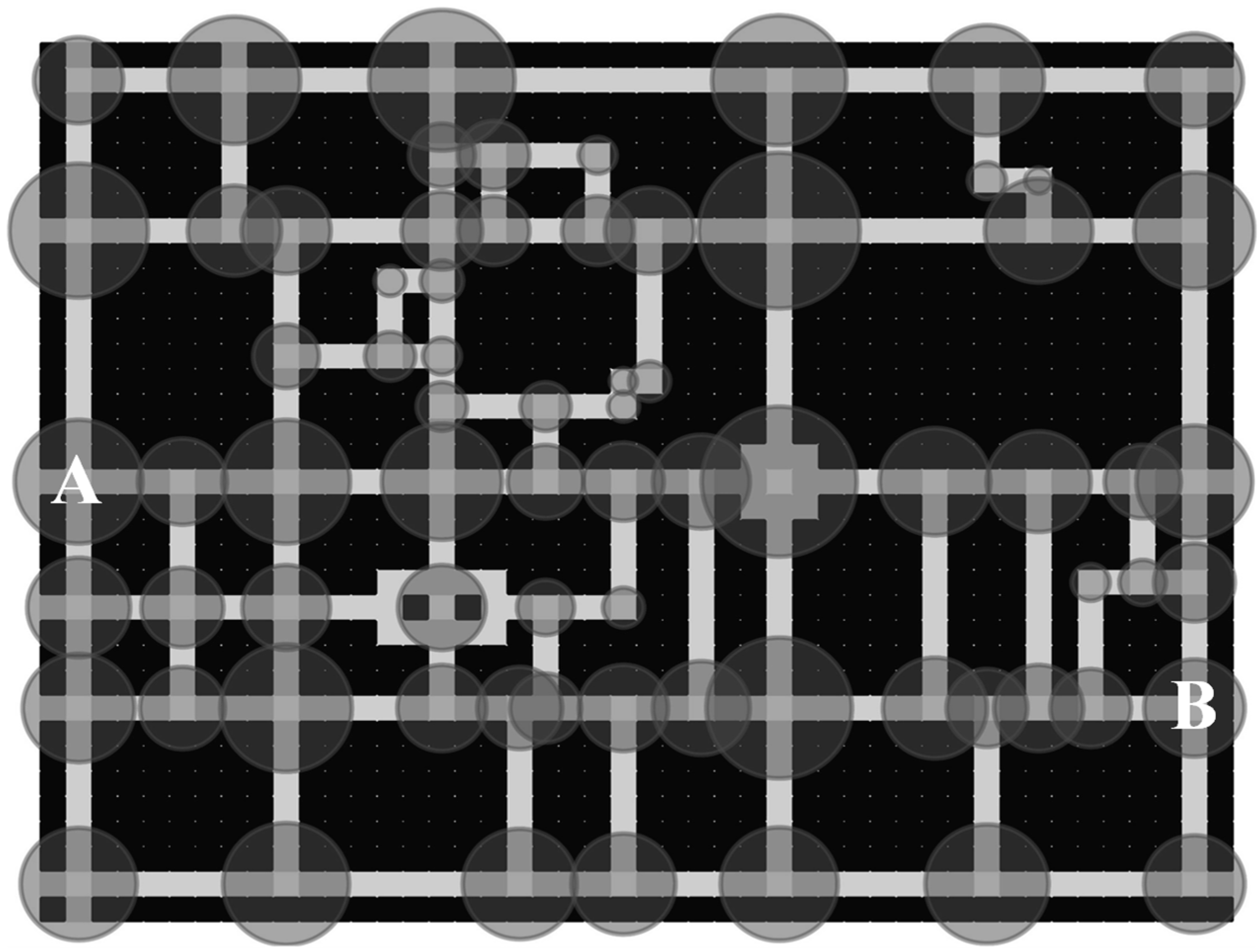
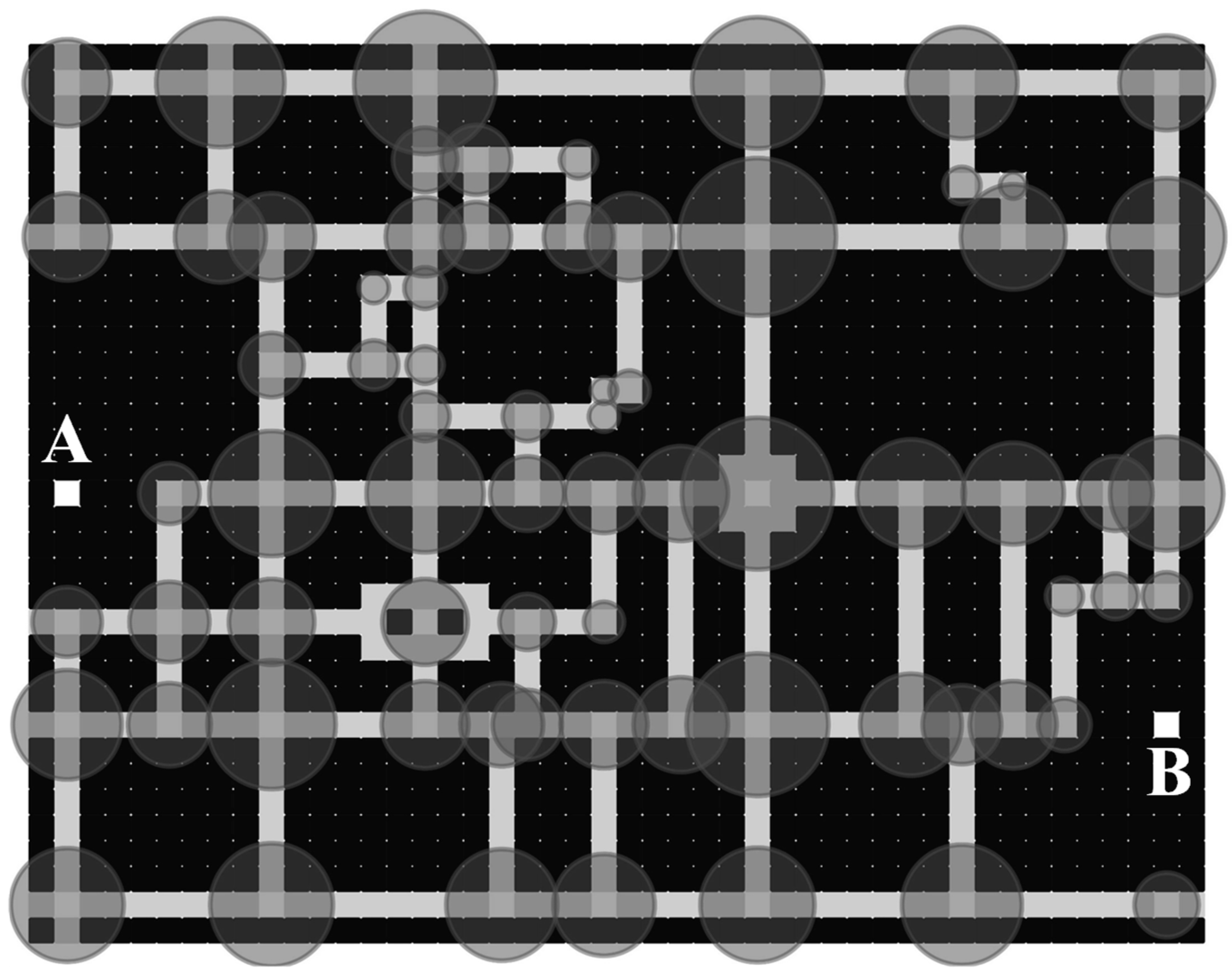
3.3. Study of Regional Resilient Transport
3.4. Algorithm Evaluation and Experiments Comparison
3.4.1. Contrasting with a Non-Compressed Raster Map
3.4.2. Contrasting with Other Raster Map Construction Algorithms
3.4.3. Summary of the Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Bloomberg, M. A stronger, more resilient New York. In City of New York, Chapter 4: Buildings, PlaNYC Report. Available online: https://www1.nyc.gov/assets/sirr/downloads/pdf/Ch4_Buildings_FINAL_singles.pdf (accessed on 13 November 2021).
- Koks, E.E.; Rozenberg, J.; Zorn, C.; Tariverdi, M.; Hallegatte, S. A global multi-hazard risk analysis of road and railway infrastructure assets. Nat. Commun. 2019, 10, 2677. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mahriyar, M.Z.; Rho, J.H. The compact city concept in creating resilient city and transportation system in Surabaya. Proced.-Soc. Behav. Sci. 2014, 135, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Amdal, J.R.; Swigart, S.L. Resilient transportation systems in a post-disaster environment: A case study of opportunities realized and missed in the greater new orleans region, 2010. UNOTI Publications. 2010, p. 5. Available online: http://scholarworks.uno.edu/unoti_pubs/5 (accessed on 13 November 2021).
- Murray-Tuite, P.M. A comparison of transportation network resilience under simulated system optimum and user equilibrium conditions. In Proceedings of the 2006 Winter Simulation Conference, Monterey, CA, USA, 13 March 2006; pp. 1398–1405. [Google Scholar]
- Yang, J.; Su, J.R.; Xia, J.H.; Jin, C.; Li, X.M.; Ge, Q.S. The impact of spatial form of urban architecture on the urban thermal environment: A case study of the Zhongshan District, Dalian, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2709–2716. [Google Scholar] [CrossRef]
- Yang, J.; Jin, S.H.; Xiao, X.M.; Jin, C.; Xia, J.H.; Li, X.M.; Wang, S.J. Local climate zone ventilation and urban land surface temperatures: Towards a performance-based and wind-sensitive planning proposal in megacities. Sustain. Cities Soc. 2019, 47, 101487. [Google Scholar] [CrossRef]
- Yang, J.; Wang, Y.; Xiu, C.; Xiao, X.; Jin, C. Optimizing local climate zones to mitigate urban heat island effect in human settlements. J. Clean. Prod. 2020, 275, 123767. [Google Scholar] [CrossRef]
- Yang, J.; Zhan, Y.X.; Xiao, X.M.; Xia, J.H.; Sun, W.; Li, X.M. Investigating the diversity of land surface temperature characteristics in different scale cities based on local climate zones. Urban. Clim. 2020, 34, 1–12. [Google Scholar] [CrossRef]
- Euler, L. Solutio problematis ad geometriam situs pertinentis. Commentarii academiae scientiarum Petropolitanae 1741, 8, 128–140. [Google Scholar]
- Aho, A.V.; Garey, M.R.; Ullman, J.D. The transitive reduction of a directed graph. SIAM J. Comput. 1972, 1, 131–137. [Google Scholar] [CrossRef] [Green Version]
- Anez, J.; Barra, T.D.L.; Pérez, B. Dual graph representation of transport networks. Transp. Res. Part B Methodol. 1996, 30, 209–216. [Google Scholar] [CrossRef]
- Hu, M.B.; Jiang, R.; Wu, Y.H.; Wang, W.X.; Wu, Q.S. Urban traffic from the perspective of dual graph. Eur. Phys. J. B 2008, 63, 127–133. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, D. A study on analyzing the grid road network patterns using relative neighborhood graph. In Proceedings of the Ninth International Symposium on Operations Research and Its Applications (ISORA’10), Chengdu, China, 19–23 August 2010; pp. 112–119. [Google Scholar]
- Thill, J. Geographic information systems for transportation in perspective. Transp. Res. Part C-Emerg. Technol. 2000, 8, 3–12. [Google Scholar] [CrossRef]
- Miller, H.J.; Wu, Y. GIS software for measuring space-time accessibility in transportation planning and analysis. Geoinformatica 2000, 4, 141–159. [Google Scholar] [CrossRef]
- Gutiérrez, J.; Condeço-Melhorado, A.; Martín, J.C. Using accessibility indicators and GIS to assess spatial spillovers of transport infrastructure investment. J. Transport. Geogr. 2010, 18, 141–152. [Google Scholar] [CrossRef]
- GSA GNSS Market Report. European GNSS Agency Report. Available online: https://www.gpsworld.com/gsa-releases-2019-gnss-market-report/ (accessed on 23 April 2020).
- Axer, S.; Friedrich, B. Level of service estimation based on low-frequency floating car data. Transp. Res. Procedia 2014, 3, 1051–1058. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Xu, Z.; Zhao, X. Traffic flow visualization using taxi GPS data. In Proceedings of the International Conference on Advanced Data Mining and Applications, Gold Coast, QLD, Australia, 12–15 December 2016; pp. 811–814. [Google Scholar]
- Shi, W.; Shen, S.; Liu, Y. Automatic generation of road network map from massive GPS, vehicle trajectories. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 3–7 October 2009; pp. 48–53. [Google Scholar]
- Qingjie, K.; Wenhuan, S.; Yuncai, L. A GPS-track-based method for automatically generating road-network vector map. J. Univ. Sci. Technol. China 2012, 42, 623–627, 647. [Google Scholar]
- Wang, F.; Xiang, Y.; You, H. SAR Image rectification based on vector map. IGARSS 2019. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8594–8597. [Google Scholar]
- Konrad, M.; Szczot, M.; Schüle, F. Generic grid mapping for road course estimation. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 851–856. [Google Scholar]
- Freitas, T.R.M.; Coelho, A.; Rossetti, R.J.F. Improving digital maps through GPS data processing. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 3–7 October 2009; pp. 480–485. [Google Scholar]
- Bierlaire, M.; Chen, J.; Newman, J. A probabilistic map matching method for smartphone GPS data. Transp. Res. Part C-Emerg. Technol. 2013, 26, 78–98. [Google Scholar] [CrossRef]
- Li, Y.; Huang, Q.; Kerber, M.; Zhang, L.; Guibas, L. Large-scale joint map matching of GPS traces. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013; pp. 214–223. [Google Scholar]
- Rahman, M.M.; Mou, J.R.; Tara, K.; Sarkar, M.L. Real time Google map and Arduino based vehicle tracking system. In Proceedings of the 2016 2nd International Conference on Electrical, Computer & Telecommunication Engineering (ICECTE), Rajshahi, Bangladesh, 8–10 December 2016; pp. 1–4. [Google Scholar]
- Xu, H.; Ma, X.P. Geographic information system design and implementation based on Web Mercator Projection. Comput. Program. Ski. Maint. 2011, 8, 41–43, 51. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Interpretation |
|---|---|
| Flow point | the road point between nodes, the value is zero |
| Node | the coordinate of bus stop and intersection in the bus network, the value is zero |
| Access | this point is accessible to another node in this direction |
| Obstacle | a generic term for inaccessible areas, the value is one |
| Compression | the smallest rectangular area map containing the road network within the required range |
| Splicing | a map is spliced in two maps according to specifications |
| Restoration | the compressed map is restored to the raster map represented by zero and one |
| Base map | a local map as a datum reference |
| Method. | Main Advantages | Main Disadvantages |
|---|---|---|
| Based on professional software such as ArcGIS, MapGIS | Powerful, comprehensive, transferable, flexible, and efficient operation | Professional training is required, the cost of software procurement and configuration is high, the operating environment is required, and the self-expansion is insufficient |
| Road network extraction method based on remote sensing image | The highest precision | Slow update and high cost of acquisition; the directionality, one-way and two-way characteristics, and topological structures of roads cannot be taken into account |
| Road extraction method based on GPS trajectory clustering | Easy to extract road shape and identify intersection | Not suitable for multi-noise situations; requires high-accuracy data and needs data distribution near the road center |
| Generation of raster map by GPS coordinate transformation | Simple method, short period (almost real time) | Batch conversion, large amount of data, difficult local update |
| Dynamic addition of road Vector Edge based on GPS trajectory | Dynamic, high accuracy | Difficult to identify overlapped sections and intersections, needs the base map |
| Proposed method | No base map needed Dynamic and updated locally The smallest storage occupation under the same specification | Suitable for low-accuracy application scenarios |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Ling, S.; Wang, P.; Hu, X.; Liu, L. Method for Fast Map Construction Based on GPS Data and Compressed Grid Algorithm. Land 2021, 10, 1322. https://doi.org/10.3390/land10121322
Zhang J, Ling S, Wang P, Hu X, Liu L. Method for Fast Map Construction Based on GPS Data and Compressed Grid Algorithm. Land. 2021; 10(12):1322. https://doi.org/10.3390/land10121322
Chicago/Turabian StyleZhang, Jian, Shuai Ling, Ping Wang, Xiaoyang Hu, and Lu Liu. 2021. "Method for Fast Map Construction Based on GPS Data and Compressed Grid Algorithm" Land 10, no. 12: 1322. https://doi.org/10.3390/land10121322