
Precipitation Nowcasting Based on Deep Learning over Guizhou, China
 ,
,
Abstract
:1. Introduction
2. Data and Method
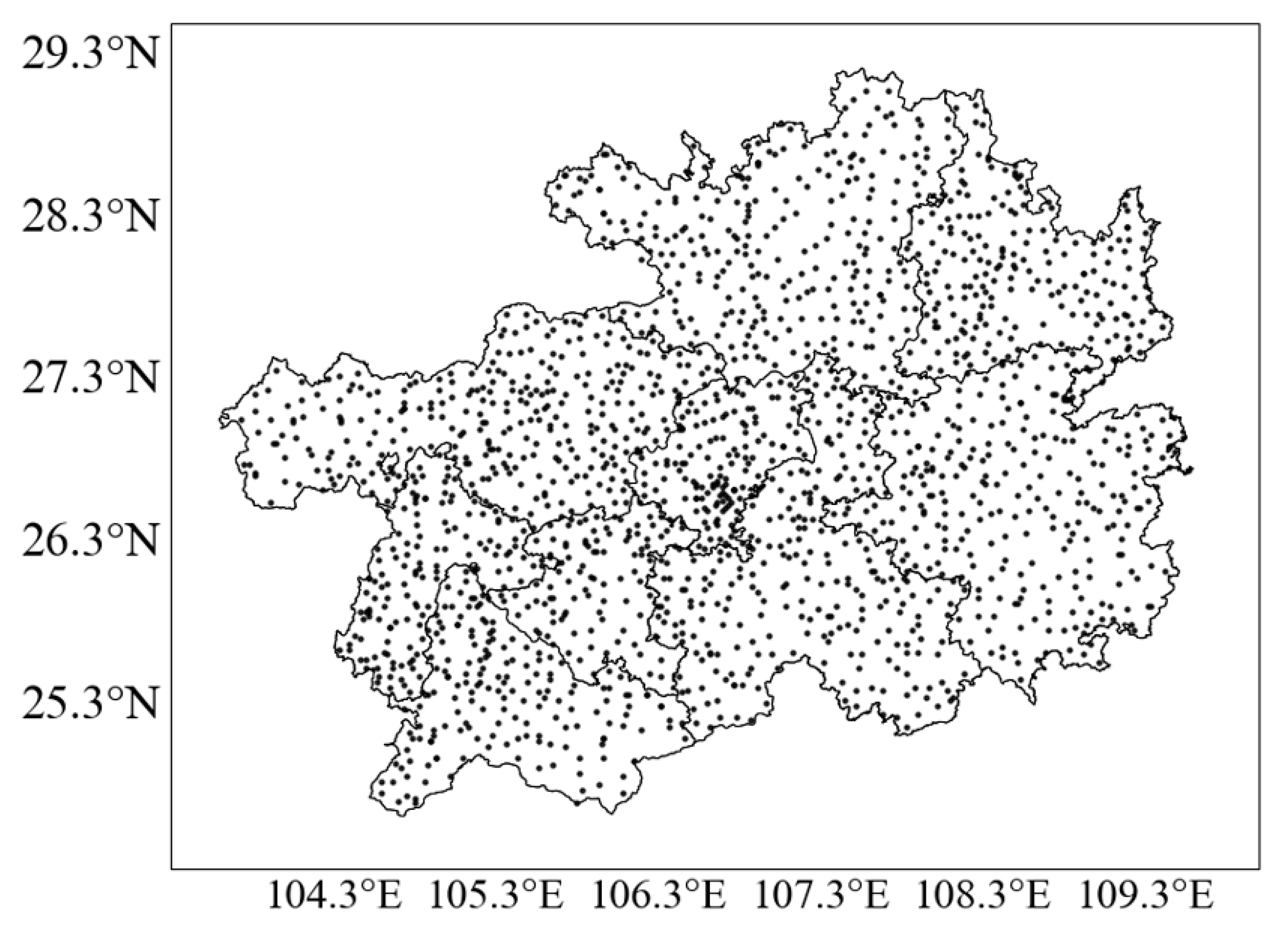
2.1. Guizhou Automatic Weather Station (AWS) Observations
2.2. Pre-Processed Precipitation Dataset (Pre-P Dataset)
2.3. Heavy Precipitation Dataset (Hea-P Dataset)
2.4. Lucas–Kanade (LK) Optical Flow Method
2.5. Convolutional Long Short-Term Memory (ConvLSTM) Model
2.6. Predictive Recurrent Neural Network (PredRNN)
2.7. Verification Metrics
2.7.1. Root Mean Square Error (RMSE)
2.7.2. Probability of Detection (POD), False Alarm Ratio (FAR), Probability of False Detection (POFD), and Equitable Threat Score (ETS)
2.7.3. Method for Object-Based Diagnostic Evaluation (MODE)
3. Results
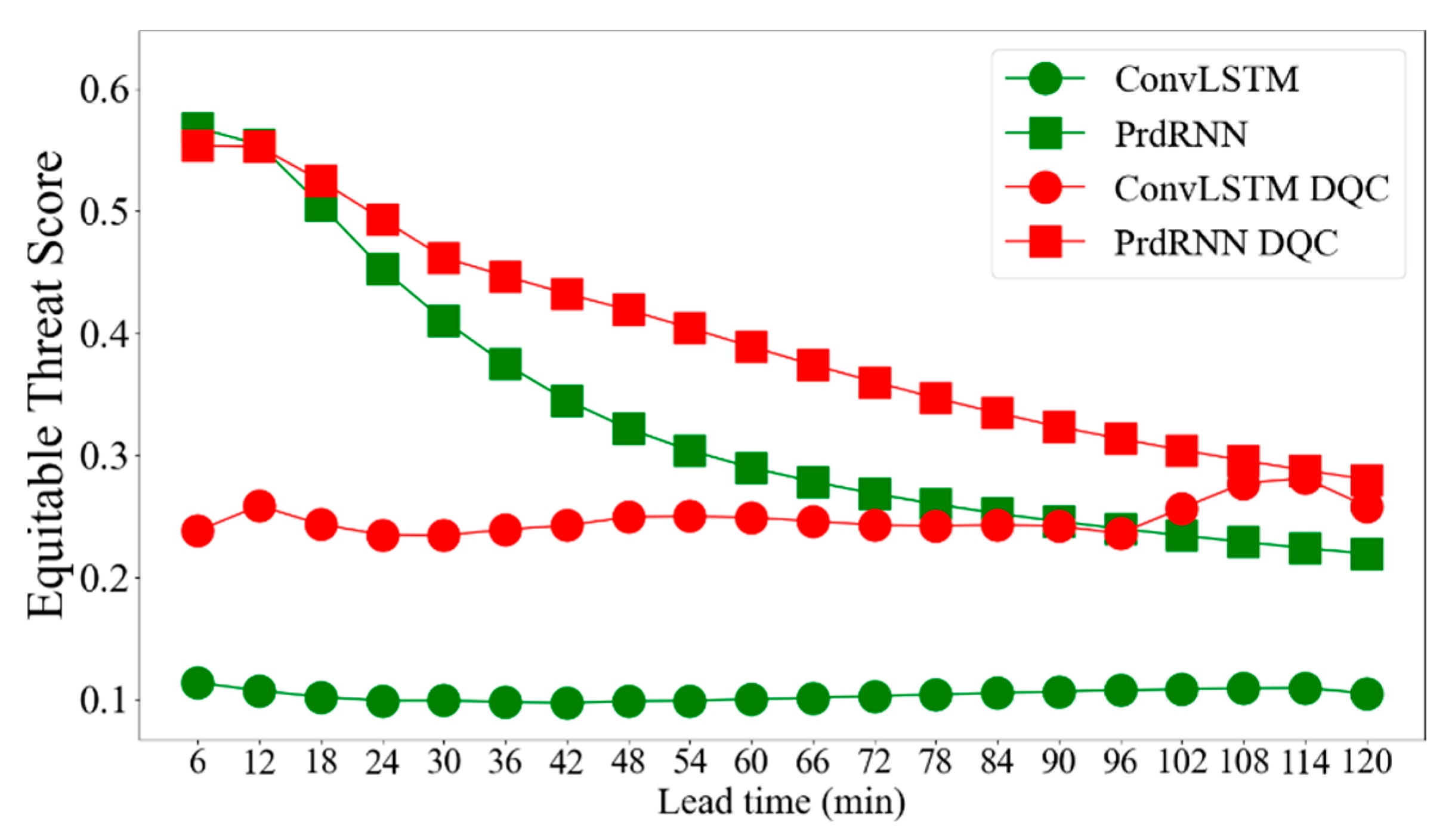
3.1. Data Quality Control (DQC) Evaluation
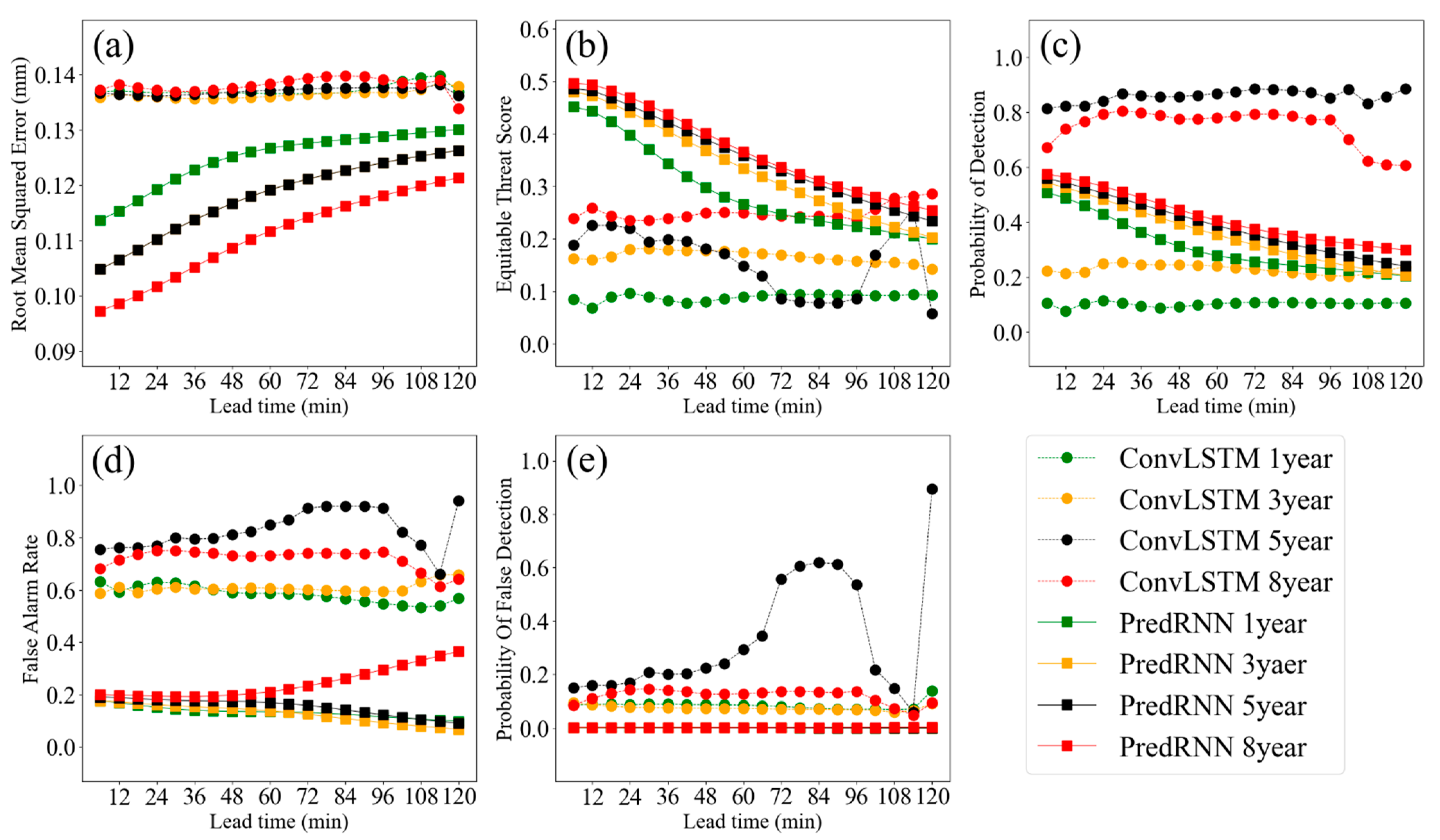
3.2. DL Models Trained Using Datasets with Different Time Series Lengths
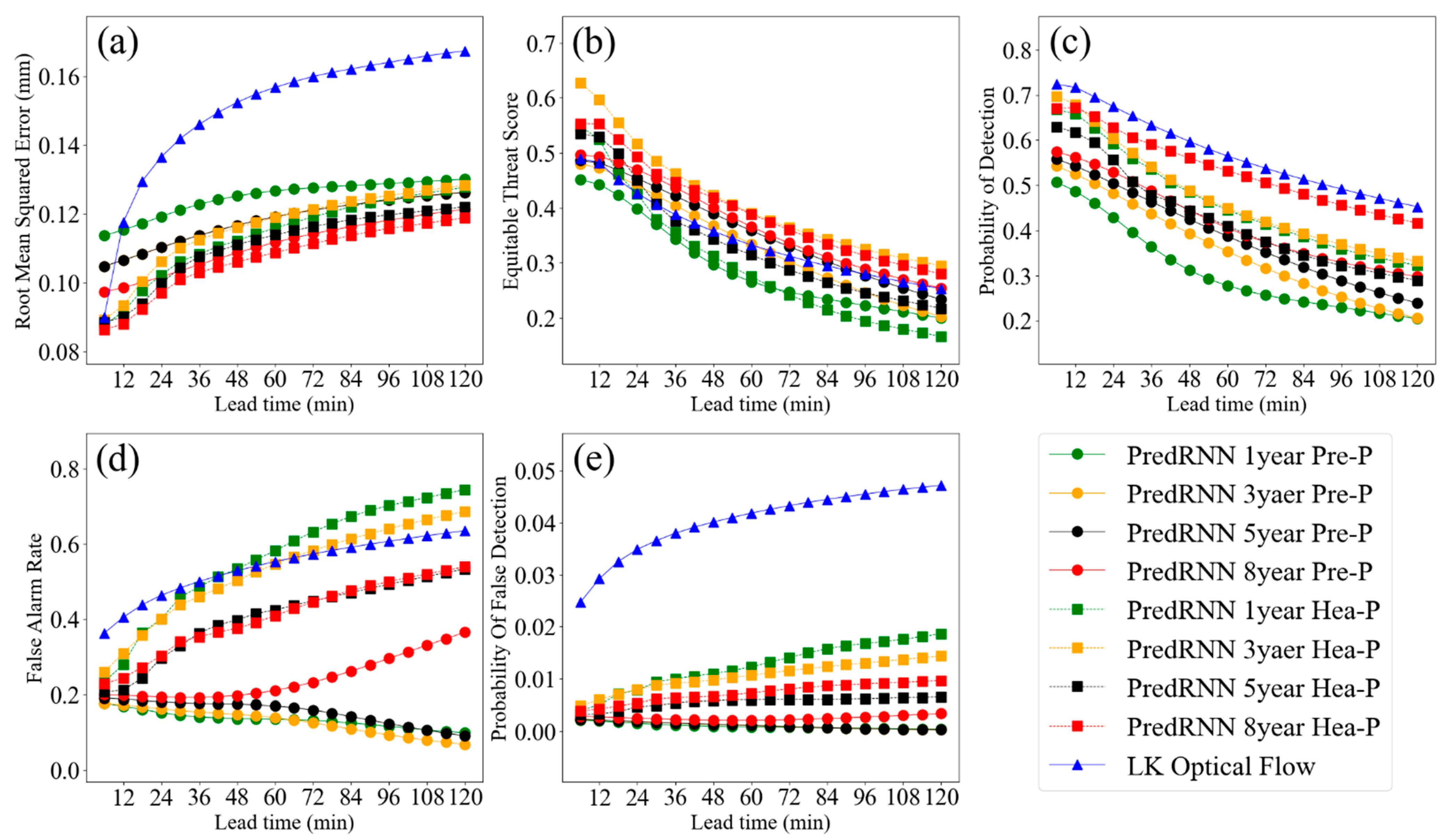
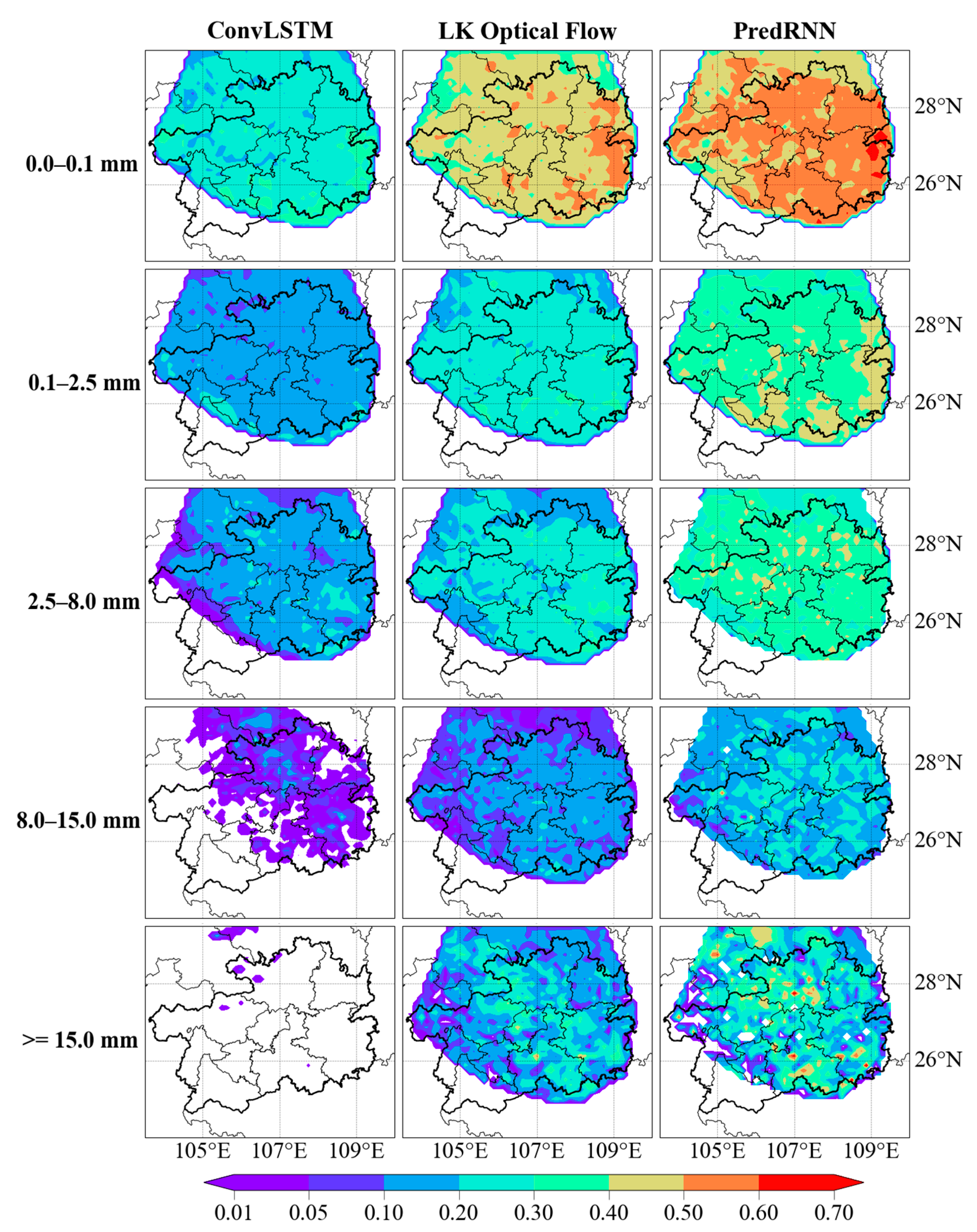
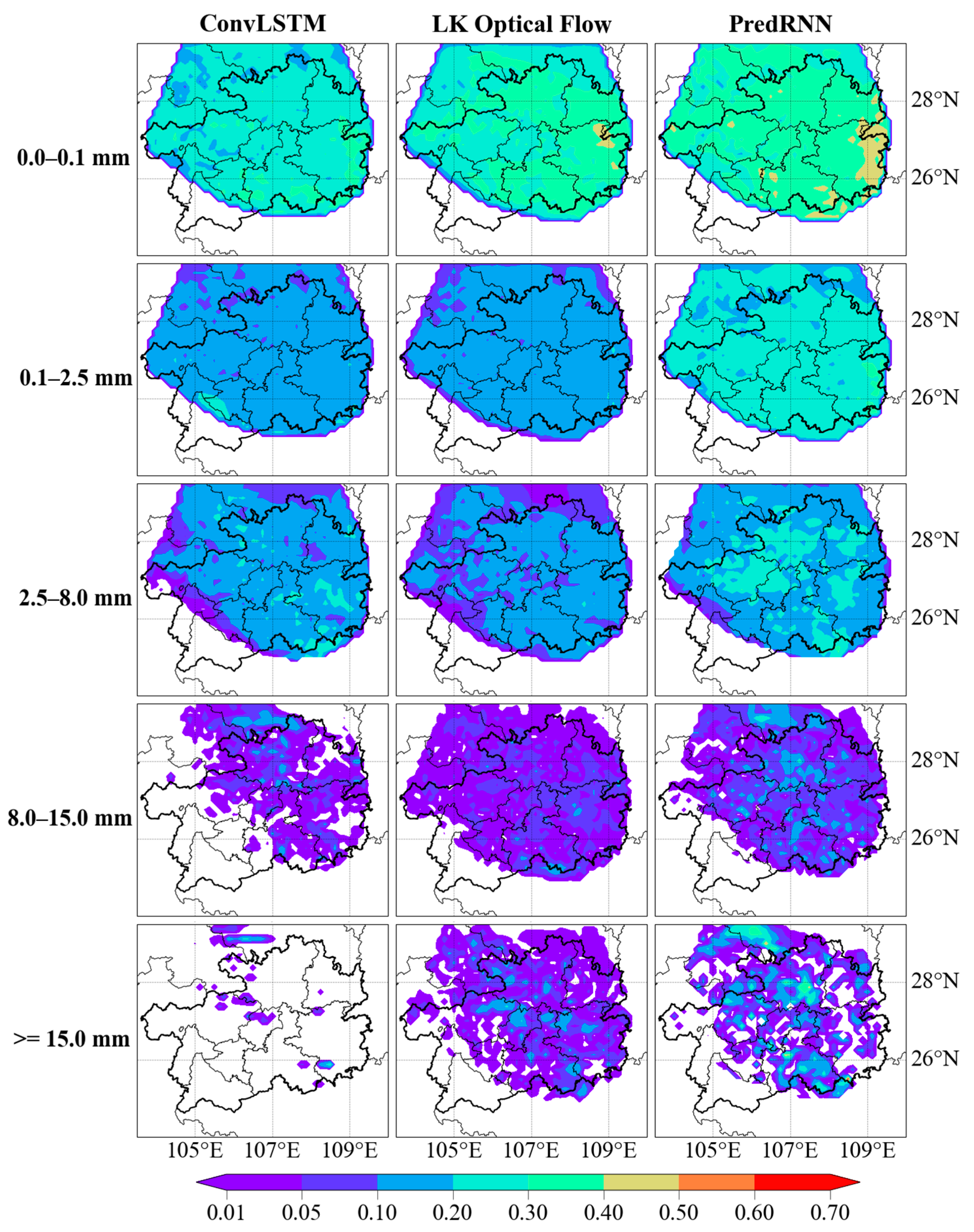
3.3. Deep Learning Model Training Using the Heavy Precipitation (Hea-P) Dataset
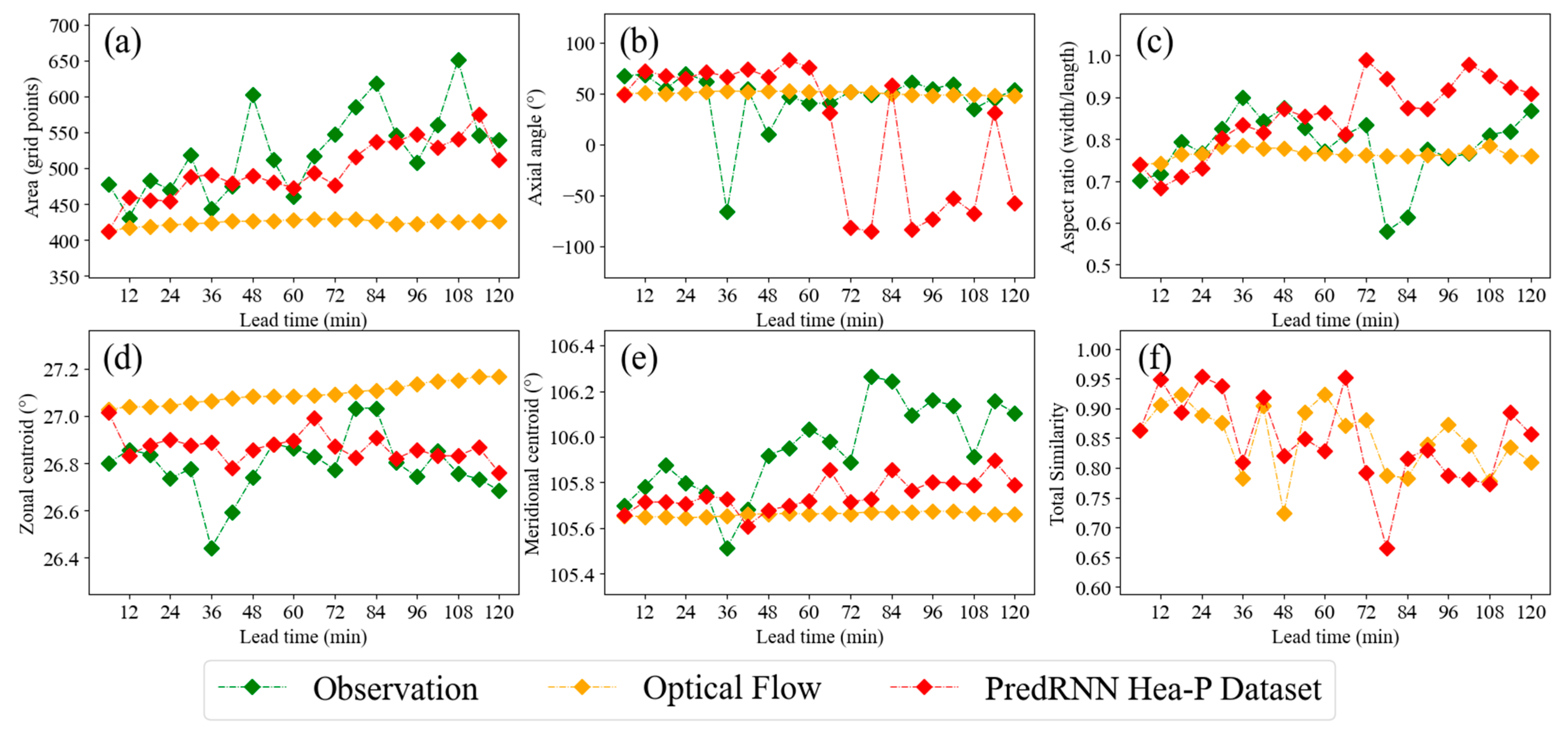
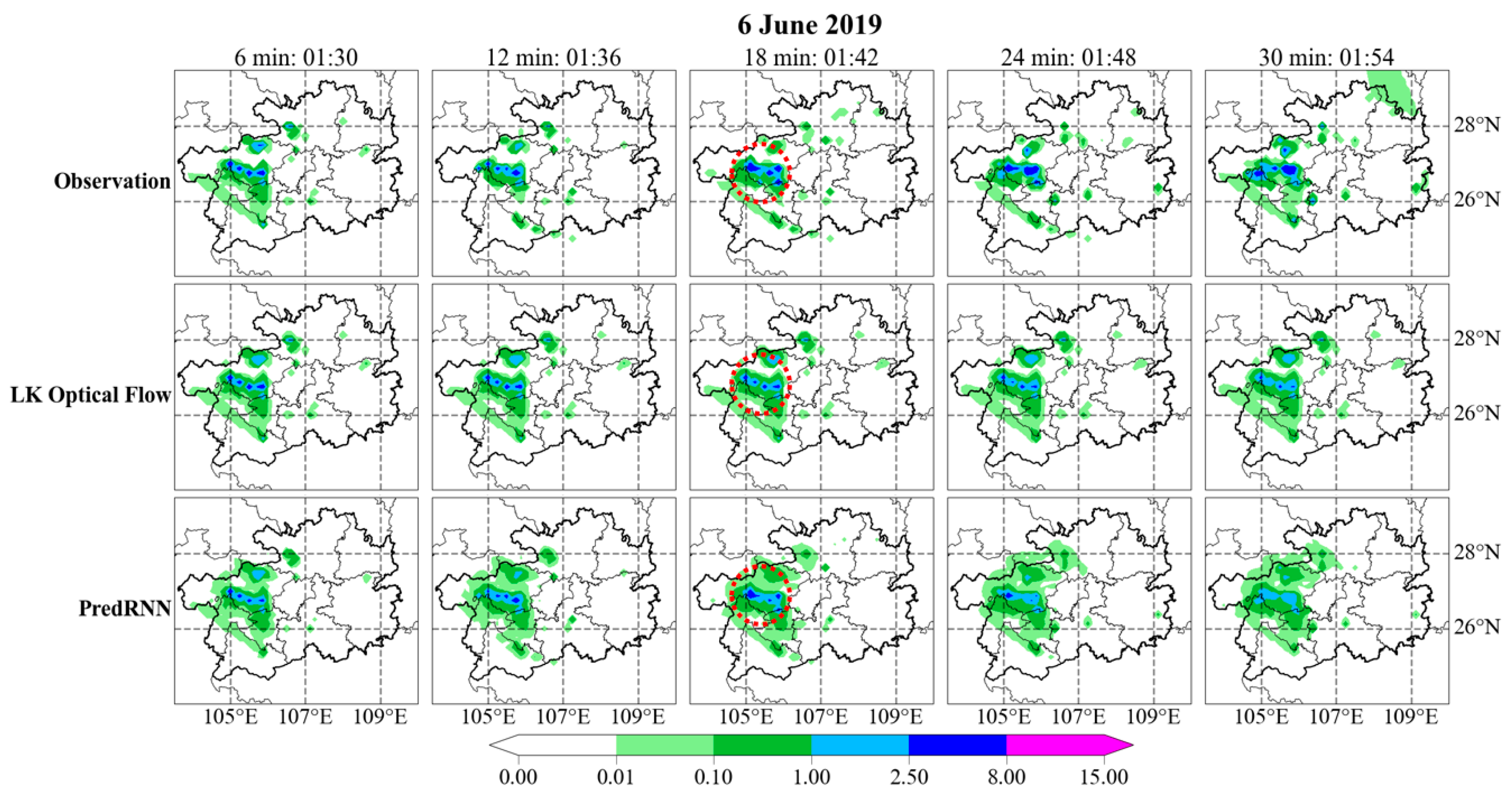
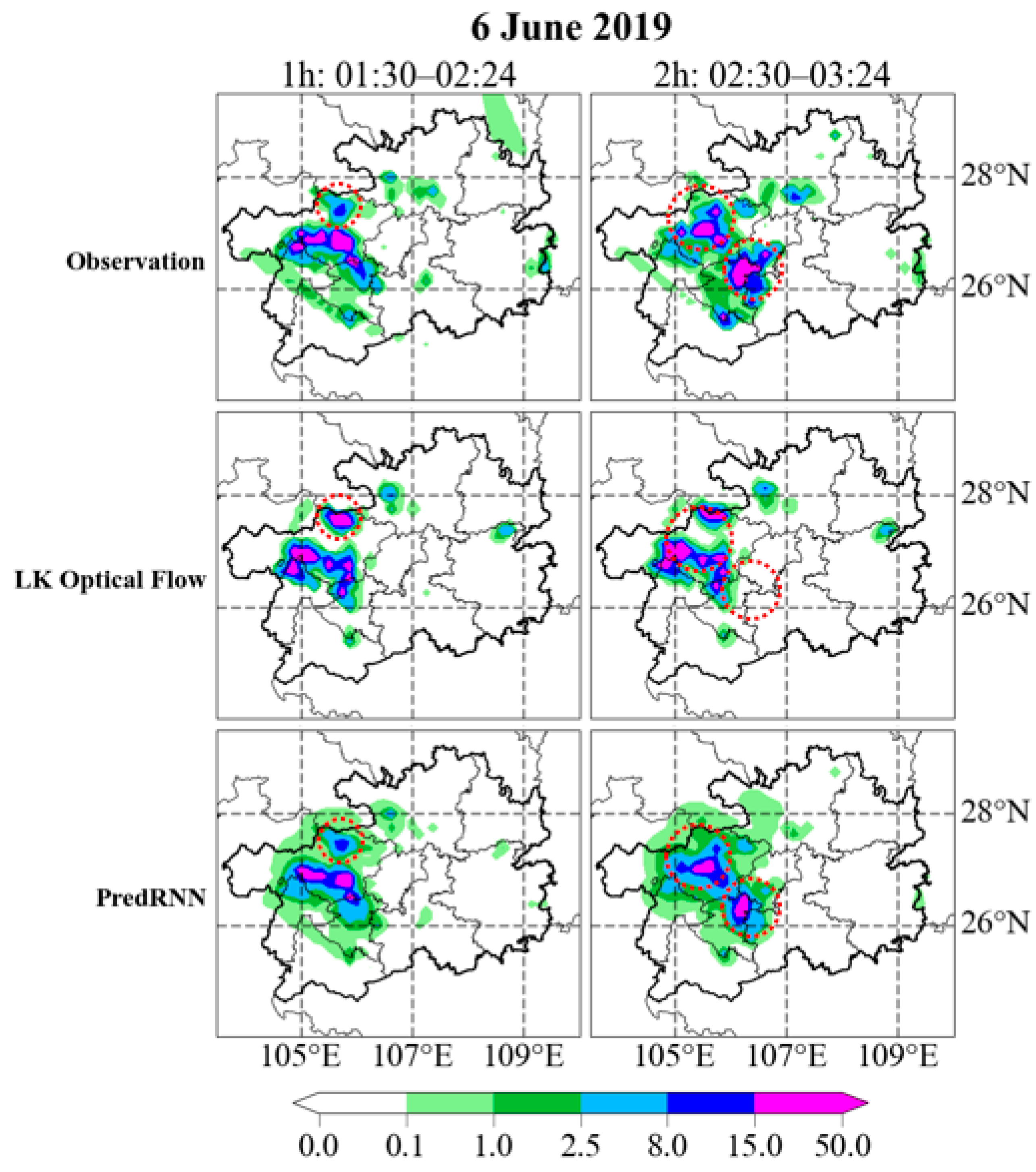
3.4. Structure Evaluation on a Rainstorm Case
4. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, J. Convective-scale assimilation of radar data: Progress and challenges. Q. J. R. Meteorol. Soc. 2005, 131, 3439–3463. [Google Scholar] [CrossRef]
- Bachmann, K.; Keil, C.; Craig, G.C.; Weissmann, M.; Welzbacher, C.A. Predictability of deep convection in idealized and operational forecasts: Effects of radar data assimilation, orography, and synoptic weather regime. Mon. Weather Rev. 2020, 148, 63–81. [Google Scholar] [CrossRef]
- Wang, T.; Liu, Y.; Dong, C.; Li, J. Review of short-term precipitation forecasting methods and their applications. Electron. World 2019, 10, 11–13. [Google Scholar]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Pulkkinen, S. PySTEPS: An open-source Python library for probabilistic precipitation nowcasting (v1. 0). Geosci. Model Dev. 2019, 12, 4185–4219. [Google Scholar] [CrossRef]
- Atencia, R.T.; Sairouni, A. Improving QPF by blending techniques at the meteorological service of catalonia. Nat. Hazards Earth Syst. Sci. 2010, 7, 1443–1455. [Google Scholar] [CrossRef]
- Haiden, T.; Kann, A.; Wittmann, C.; Pistotnik, G.; Bica, B. The integrated nowcasting through comprehensive analysis (INCA) system and its validation over the eastern alpine region. Weather Forecast. 2011, 2, 166–183. [Google Scholar] [CrossRef]
- Liang, Q.; Feng, Y.; Deng, W.; Hu, S.; Huang, Y.; Zeng, Q.; Chen, Z. A composite approach of radar echo extrapolation based on TREC vectors in combination with model predicted winds. Adv. Atmos. Sci. 2010, 5, 1119–1130. [Google Scholar] [CrossRef]
- Sun, J.; Xue, M.; Wilson, J.W.; Zawadzki, I.; Ballard, S.P.; Onvlee-Hooimeyer, J.; Joe, P.; Barker, D.M.; Li, P.-W.; Golding, B.; et al. Use of NWP for nowcasting convective precipitation: Recent progress and challenges. Bull. Am. Meteorol. Soc. 2014, 95, 409–426. [Google Scholar] [CrossRef]
- Ravuri, S.; Lenc, K.; Willson, M.; Kangin, D.; Lam, R.; Mirowski, P.; Fitzsimons, M.; Athanassiadou, M.; Kashem, S.; Madge, S.; et al. Skillful precipitation nowcasting using deep generative models of radar. Nature 2021, 597, 672–677. [Google Scholar] [CrossRef]
- Crane, R.K. Automatic cell detection and tracking. IEEE Trans. Geosci. Electron. 1979, 17, 250–262. [Google Scholar] [CrossRef]
- Rasmussen, R.; Dixon, M.; Hage, F.; Cole, J.; Rehak, N. Weather support to deicing decision making (WSDDM): A winter weather nowcasting system. Bull. Amer. Meteorol. Soc. 2001, 82, 579–596. [Google Scholar] [CrossRef]
- Mueller, C.; Saxen, T.; Roberts, R.; Wilson, J.; Betancourt, T.; Dettling, S.; Oien, N.; Yee, J. NCAR auto-nowcast system. Weather Forecast. 2003, 18, 545–561. [Google Scholar] [CrossRef]
- Cheung, P.; Yeung, H.Y. Application of optical-flow technique to significant convection nowcast for terminal areas in Hong Kong. In Proceedings of the 3rd WMO International Symposium on Nowcasting and Very Short-Range Forecasting (WSN12), Rio de Janeiro, Brazil, 6 August 2012; pp. 6–10. [Google Scholar]
- Cao, C.Y.; Chen, Y.Z.; Liu, D.H. The optical flow method and its application to nowcasting. Acta Meteor. Sinica 2015, 73, 471–480. [Google Scholar]
- Han, L.; Wang, H.Q.; Lin, Y.J. Application of optical flow method to nowcasting convective weather. Acta Sci. Nat. Univ. Pekin. 2008, 44, 751–755. [Google Scholar]
- Feng, Y.; Kitzmiller, D. A short-range quantitative precipitation forecast algorithm using back-propagation neural network approach. Adv. Atmos. Sci. 2006, 23, 405–414. [Google Scholar] [CrossRef]
- Dixon, M.; Wiener, G. TITAN: Thunderstorm identification, tracking, and nowcasting—A radar-based methodology. J. Atmos. Ocean. Technol. 1993, 10, 785–797. [Google Scholar] [CrossRef]
- Johnson, J.T.; MacKeen, P.L.; Witt, A.; Mitchell, E.D.; Stumpf, G.J.; Eilts, M.D.; Thomas, K.W. The storm cell identification and tracking algorithm: An enhanced WSR-88D algorithm. Weather Forecast. 1998, 13, 263–276. [Google Scholar] [CrossRef]
- Wilson, J.W.; Feng, Y.; Chen, M.; Roberts, R.D. Nowcasting challenges during the Beijing Olympics: Successes, failures, and implications for future nowcasting systems. Weather Forecast. 2010, 25, 1691–1714. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Peng, T.; Zhi, X.; Ji, Y.; Ji, L.; Tian, Y. Prediction Skill of Extended Range 2-m Maximum Air Temperature Probabilistic Forecasts Using Machine Learning Post-Processing Methods. Atmosphere 2020, 11, 823. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhi, X.; Lyu, Y.; Zhu, S.; Tong, H.; Mamtimin, A.; Zhang, H.; Huo, W. Forecast calibrations of surface air temperature over Xinjiang based on U-net neural network. Front. Environ. Sci. 2022, 10, 2296–2665. [Google Scholar] [CrossRef]
- Zhi, X.; Wang, J. Editorial: AI-based prediction of high-impact weather and climate extremes under global warming: A perspective from the large-scale circulations and teleconnections. Front. Earth Sci. 2023, 11, 2296–6463. [Google Scholar] [CrossRef]
- Pan, X.; Lu, Y.; Zhao, K.; Huang, H.; Wang, M.; Chen, H. Improving Nowcasting of Convective Development by Incorporating Polarimetric Radar Variables Into a Deep-Learning Model. Geophys. Res. Lett. 2021, 48, e2021GL095302. [Google Scholar] [CrossRef]
- Li, D.; Liu, Y.; Chen, C. MSDM v1.0: A machine learning model for precipitation nowcasting over eastern China using multisource data. Geosci. Model Dev. 2021, 14, 4019–4034. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 1–12. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep learning for precipitation nowcasting: A benchmark and a new model. Adv. Neural Inf. Process. Syst. 2017, 30, 1–17. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. Predrnn: Recurrent neural networks for predictive learning using spatiotemporal lstms. Adv. Neural Inf. Process. Syst. 2017, 30, 1–10. [Google Scholar]
- Wang, Y.; Gao, Z.; Long, M.; Wang, J.; Philip, S.Y. PredRNN++: Towards a resolution of the deep-in-time dilemma in spatiotemporal predictive learning. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 5123–5132. [Google Scholar]
- Ji, Y.; Gong, B.; Langguth, M.; Mozaffari, A.; Zhi, X. CLGAN: A GAN-based video prediction model for precipitation nowcasting. EGUsphere 2022, 1–23. [Google Scholar] [CrossRef]
- Chen, X.; Liu, J.; Zheng, Q.; Li, X.; Liu, J. A Study on Radar Echo Nowcasting Based on Convolutional Gated Recurrent Unit Neural Network. Plateau Meteorol. 2021, 40, 1–13. [Google Scholar]
- Foresti, L.; Sideris, I.; Nerini, D.; Beusch, L.; Germann, U. Using a 10-year radar archive for nowcasting precipitation growth and decay: A probabilistic machine learning approach. Weather Forecast. 2017, 34, 1547–1569. [Google Scholar] [CrossRef]
- Agrawal, S.; Barrington, L.; Bromberg, C.; Burge, J.; Gazen, C.; Hickey, J. Machine learning for precipitation nowcasting from radar images. arXiv 2019, arXiv:1912.12132. [Google Scholar]
- Mao, Y.; Sorteberg, A. Improving Radar-Based Precipitation Nowcasts with Machine Learning Using an Approach Based on Random Forest. Weather Forecast 2020, 35, 2461–2478. [Google Scholar] [CrossRef]
- Germann, U.; Zawadzki, I. Scale dependence of the predictability of precipitation from continental radar images. Part II: Probability forecasts. J. Appl. Meteorol. 2004, 43, 74–89. [Google Scholar] [CrossRef]
- Sun, N.; Zhou, Z.; Li, Q.; Zhou, X. Spatiotemporal Prediction of Monthly Sea Subsurface Temperature Fields Using a 3D U-Net-Based Model. Remote Sens. 2022, 14, 4890. [Google Scholar] [CrossRef]
- Trebing, K.; Stańczyk, T.; Mehrkanoon, S. SmaAt-UNet: Precipitation nowcasting using a small attention-UNet architecture. Pattern Recognit. Lett. 2021, 145, 178–186. [Google Scholar] [CrossRef]
- Gong, B.; Langguth, M.; Ji, Y.; Mozaffari, A.; Stadtler, S.; Mache, K.; Schultz, M.G. Temperature forecasting by deep learning methods. Geosci. Model Dev. Discuss. 2022, 15, 8931–8956. [Google Scholar] [CrossRef]
- Chkeir, S.; Anesiadou, A.; Mascitelli, A.; Biondi, R. Nowcasting extreme rain and extreme wind speed with machine learning techniques applied to different input datasets. Atmos. Res. 2022, 282, 106548. [Google Scholar] [CrossRef]
- Huang, H.; Lin, L.; Tong, R.; Hu, H.; Zhang, Q.; Iwamoto, Y.; Han, X.; Chen, Y.W.; Wu, J. Unet 3+: A full-scale connected unet for medical image segmentation. In Proceedings of the ICASSP 2020–2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 1055–1059. [Google Scholar]
- Akbari Asanjan, A.; Yang, T.; Hsu, K.; Sorooshian, S.; Lin, J.; Peng, Q. Short-term precipitation forecast based on the persian system and lstm recurrent neural networks. J. Geophys. Res. Atmos. 2018, 123, 12543–12563. [Google Scholar] [CrossRef]
- Ayzel, G.; Heistermann, M.; Sorokinc, A.; Nikitinc, O.; Lukyanovacet, O. All convolutional neural networks for radar-based precipitation nowcasting. Procedia Comput. Sci. 2019, 150, 186–192. [Google Scholar] [CrossRef]
- Su, A.; Li, H.; Cui, L.; Chen, Y. A convection nowcasting method based on machine learning. Adv. Meteorol. 2020, 2020, 5124274. [Google Scholar] [CrossRef]
- Tian, L.; Li, X.; Ye, Y.; Xie, P.; Li, Y. A generative adversarial gated recurrent unit model for precipitation nowcasting. IEEE Geosci. Remote Sens. Lett. 2020, 17, 601–605. [Google Scholar] [CrossRef]
- Han, L.; Sun, J.; Zhang, W. Convolutional neural network for convective storm nowcasting using 3-d doppler weather radar data. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1487–1495. [Google Scholar] [CrossRef]
- Suzanna, M.; Alexandre, E. Precipitation Nowcasting with Weather Radar Images and Deep Learning in São Paulo, Brasil. Atmosphere 2020, 11, 1157. [Google Scholar]
- Yu, L.; Du, X.; Zhao, L.; Yang, H. A new methodology for pixel-quantitative precipitation nowcasting using a pyramid Lucas Kanade optical flow approach. J. Hydrol. 2015, 529, 354–364. [Google Scholar]
- Gan, W.; Li, G.; Wan, X. Variation Characteristics of Extreme Precipitation During May-September in Guizhou Province in Recent 57 Years. J. Arid. Meteorol. 2018, 36, 617–623. [Google Scholar]
- Bai, H.; Gao, H. Influences of the Somaliacross-equatorial flow on the beginning date of rainy season in Southwest China. Chin. J. Atmos. Sci. 2017, 41, 702–712. (In Chinese) [Google Scholar]
- Reich, S. An explicit and conservative remapping strategy for semi-Lagrangian advection. Atmos. Sci. Lett. 2017, 8, 58–63. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, L.; Jiang, H.; Lyu, Y.; Fan, Y.; Guo, Z.; Zhi, X. Pattern projection calibrations on subseasonal forecasts of surface air temperature over East Asia. Weather. Forecast. 2023. [Google Scholar] [CrossRef]
- Zhu, S.; Zhi, X.; Ge, F.; Fan, Y.; Zhang, L.; Gao, J. Subseasonal forecast of surface air temperature using superensemble approaches: Experiments over Northeast Asia for 2018. Weather. Forecast. 2021, 36, 39–51. [Google Scholar] [CrossRef]
- Lyu, Y.; Zhi, X.; Zhu, S.; Fan, Y.; Pan, M. Statistical calibrations of surface air temperature forecasts over East Asia using pattern projection methods. Weather. Forecast. 2021, 36, 1661–1674. [Google Scholar] [CrossRef]
- Davis, C.; Brown, B.; Bullock, R. Object-based verification of precipitation forecasts. Part I: Methodology and application to mesoscale rain areas. Mon. Weather Rev. 2006, 134, 1772–1784. [Google Scholar] [CrossRef]
- Davis, C.; Brown, B.; Bullock, R. Object-based verification of precipitation forecasts. Part II: Application to convective rain systems. Mon. Weather Rev. 2006, 134, 1785–1795. [Google Scholar] [CrossRef]
- Johnson, A.; Wang, X. Object-Based Evaluation of a Storm-Scale Ensemble during the 2009 NOAA Hazardous Weather Testbed Spring Experiment. Mon. Weather Rev. 2013, 141, 1079–1098. [Google Scholar] [CrossRef]
- Ji, L.; Zhi, X.; Simmer, C.; Zhu, S.; Ji, Y. Multimodel ensemble forecasts of precipitation based on an object-based diagnostic evaluation. Mon. Weather Rev. 2020, 148, 2591–2606. [Google Scholar] [CrossRef]
- Min, A.; Liao, Y.; Deng, W.; Zhang, C. A brief description of the main rainstorm weather process in China from April to October 2019. Torrential Rain Disasters 2020, 39, 539–548. [Google Scholar]
- Ayzel, G.; Scheffer, T.; Heistermann, M. RainNet v1.0: A convolutional neural network for radar-based precipitation nowcasting. Geosci. Model Dev. 2020, 13, 2631–2644. [Google Scholar] [CrossRef]
- Huang, Q.; Chen, S.; Tan, J. TSRC: A Deep Learning Model for Precipitation Short-Term Forecasting over China Using Radar Echo Data. Remote Sens. 2022, 15, 142. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | ConvLSTM | ConvLSTM DQC | PredRNN | PredRNN DQC | ||||
|---|---|---|---|---|---|---|---|---|
| Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.1009 | 0.1658 | 0.3295 | 0.2523 | 0.4868 | 0.2121 | 0.5097 | 0.3425 |
| ≥1 mm | 0.2223 | 0.1406 | 0.2637 | 0.2346 | 0.3574 | 0.1302 | 0.3694 | 0.2363 |
| ≥2.5 mm | 0.1033 | 0.0922 | 0.0687 | 0.0390 | 0.2341 | 0.1046 | 0.3319 | 0.1700 |
| ≥8 mm | 0.0039 | 0.0037 | 0.0032 | 0 | 0.0858 | 0.0276 | 0.1783 | 0.0586 |
| ≥15 mm | 0 | 0 | 0.0004 | 0 | 0.1289 | 0.0283 | 0.2329 | 0.0594 |
| Model | ConvLSTM 1 Year | ConvLSTM 3 Years | ConvLSTM 5 Years | ConvLSTM 8 Years | ||||
|---|---|---|---|---|---|---|---|---|
| Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.2553 | 0.0039 | 0.3015 | 0.0139 | 0.3232 | 0.3256 | 0.3295 | 0.2523 |
| ≥1 mm | 0.2030 | 0.2113 | 0.2352 | 0.1300 | 0.2531 | 0.2534 | 0.2637 | 0.2346 |
| ≥2.5 mm | 0.0135 | 0.0078 | 0.0313 | 0.0001 | 0.0170 | 0.0223 | 0.0687 | 0.0390 |
| ≥8 mm | 0.0004 | 0 | 0.0067 | 0 | 0.0007 | 0.0013 | 0.0032 | 0 |
| ≥15 mm | 0 | 0 | 0.0024 | 0 | 0 | 0.0006 | 0.0004 | 0 |
| Model | PredRNN 1 Year | PredRNN 3 Years | PredRNN 5 Years | PredRNN 8 Years | ||||
| Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.4302 | 0.1257 | 0.4352 | 0.2455 | 0.4680 | 0.2560 | 0.4868 | 0.2121 |
| ≥1 mm | 0.2991 | 0.0352 | 0.3112 | 0.1535 | 0.3468 | 0.1517 | 0.4183 | 0.1287 |
| ≥2.5 mm | 0.0877 | 0.0211 | 0.1485 | 0.0209 | 0.1757 | 0.0389 | 0.2341 | 0.1046 |
| ≥8 mm | 0.0011 | 0.0002 | 0.0062 | 0.0005 | 0.0122 | 0.0001 | 0.0858 | 0.0276 |
| ≥15 mm | 0.0021 | 0.0003 | 0.0076 | 0.0028 | 0.0064 | 0.0025 | 0.1289 | 0.0283 |
| Model | ConvLSTM 8 Years | PredRNN 8 Years | LK Optical Flow | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Lead time | 1 h | 2 h | 0–2 h | 1 h | 2 h | 0–2 h | 1 h | 2 h | 0–2 h |
| ≥0.1 mm | 0.3295 | 0.2523 | 0.2909 | 0.4868 | 0.2121 | 0.3495 | 0.4502 | 0.2914 | 0.3708 |
| ≥1 mm | 0.2637 | 0.2346 | 0.2492 | 0.4183 | 0.1287 | 0.2735 | 0.3322 | 0.2011 | 0.2666 |
| ≥2.5 mm | 0.0687 | 0.0390 | 0.0539 | 0.2341 | 0.1046 | 0.1694 | 0.2178 | 0.1061 | 0.1620 |
| ≥8 mm | 0.0032 | 0.0000 | 0.0016 | 0.0858 | 0.0276 | 0.0567 | 0.1081 | 0.0422 | 0.0751 |
| ≥15 mm | 0.0004 | 0.0000 | 0.0002 | 0.1289 | 0.0283 | 0.0786 | 0.1681 | 0.0407 | 0.1044 |
| Model | PredRNN 1 Year | PredRNN 3 Years | PredRNN 5 Years | PredRNN 8 Years | |||||
|---|---|---|---|---|---|---|---|---|---|
| Pre-P dataset | Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.4302 | 0.1257 | 0.4352 | 0.2455 | 0.4680 | 0.2560 | 0.4868 | 0.2121 | |
| ≥1 mm | 0.2991 | 0.0352 | 0.3112 | 0.1535 | 0.3468 | 0.1517 | 0.4183 | 0.1287 | |
| ≥2.5 mm | 0.0877 | 0.0211 | 0.1485 | 0.0209 | 0.1757 | 0.0389 | 0.2341 | 0.1046 | |
| ≥8 mm | 0.0011 | 0.0002 | 0.0062 | 0.0005 | 0.0122 | 0.0001 | 0.0858 | 0.0276 | |
| ≥15 mm | 0.0021 | 0.0003 | 0.0076 | 0.0028 | 0.0064 | 0.0025 | 0.1289 | 0.0283 | |
| Hea-P dataset | Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.4612 | 0.2744 | 0.4492 | 0.2862 | 0.4743 | 0.3351 | 0.5097 | 0.3425 | |
| ≥1 mm | 0.2571 | 0.1279 | 0.3168 | 0.1891 | 0.3513 | 0.2322 | 0.3694 | 0.2363 | |
| ≥2.5 mm | 0.2498 | 0.1035 | 0.2506 | 0.0978 | 0.2664 | 0.1074 | 0.3319 | 0.1700 | |
| ≥8 mm | 0.1320 | 0.0442 | 0.1334 | 0.0482 | 0.1384 | 0.0411 | 0.1783 | 0.0586 | |
| ≥15 mm | 0.1177 | 0.0312 | 0.1774 | 0.0658 | 0.1828 | 0.0459 | 0.2329 | 0.0594 | |
| Model | ConvLSTM 8 Years | PredRNN 8 Years | LK Optical Flow | |||
|---|---|---|---|---|---|---|
| Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h |
| ≥0.1 mm | 0.2526 | 0.2016 | 0.5097 | 0.3425 | 0.4502 | 0.2914 |
| ≥1 mm | 0.1452 | 0.1108 | 0.3694 | 0.2363 | 0.3322 | 0.2011 |
| ≥2.5 mm | 0.1337 | 0.1342 | 0.3319 | 0.1700 | 0.2178 | 0.1061 |
| ≥8 mm | 0.0294 | 0.0283 | 0.1783 | 0.0586 | 0.1081 | 0.0422 |
| ≥15 mm | 0.0012 | 0.0042 | 0.2329 | 0.0594 | 0.1681 | 0.0407 |
| Precipitation Threshold | Observation or Forecast | Area (Grid Points) | Axial Angle (°) | Aspect Ratio (Width/Length) | Zonal Centroid (°) | Meridional Centroid (°) | Total Similarity | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lead time | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | 1 h | 2 h | |
| ≥0.1 mm | Observation | 474 | 499 | 47.98 | 50.59 | 0.73 | 0.81 | 26.79 | 26.78 | 105.86 | 106.04 | — | — |
| Optical Flow | 372 | 377 | 65.17 | 64.77 | 0.72 | 0.74 | 26.94 | 27.03 | 105.67 | 105.68 | 0.85 | 0.81 | |
| PredRNN | 418 | 487 | 72.74 | 74.84 | 0.77 | 0.89 | 26.86 | 26.87 | 105.7 | 105.83 | 0.85 | 0.88 | |
| ≥1 mm | Observation | 178 | 265 | 30.47 | −60.85 | 0.84 | 0.78 | 26.75 | 26.53 | 105.56 | 105.9 | — | — |
| Optical Flow | 199 | 198 | 58.19 | 63.99 | 0.9 | 0.92 | 26.93 | 26.99 | 105.45 | 105.44 | 0.83 | 0.7 | |
| PredRNN | 175 | 205 | 41.36 | −42.91 | 0.95 | 0.7 | 26.86 | 26.76 | 105.54 | 105.75 | 0.91 | 0.81 | |
| ≥2.5 mm | Observation | 105 | 150 | 21.5 | −48.17 | 0.7 | 0.59 | 26.78 | 26.63 | 105.57 | 105.9 | — | — |
| Optical Flow | 135 | 135 | 49.95 | 55.55 | 0.88 | 0.89 | 26.99 | 27.08 | 105.41 | 105.41 | 0.72 | 0.68 | |
| PredRNN | 92 | 123 | 20.11 | −44.88 | 0.68 | 0.59 | 26.82 | 26.73 | 105.49 | 105.81 | 0.94 | 0.92 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, D.; Zhi, X.; Ji, Y.; Yang, C.; Wang, Y.; Tian, Y.; Li, G.; Zeng, X. Precipitation Nowcasting Based on Deep Learning over Guizhou, China. Atmosphere 2023, 14, 807. https://doi.org/10.3390/atmos14050807
Kong D, Zhi X, Ji Y, Yang C, Wang Y, Tian Y, Li G, Zeng X. Precipitation Nowcasting Based on Deep Learning over Guizhou, China. Atmosphere. 2023; 14(5):807. https://doi.org/10.3390/atmos14050807
Chicago/Turabian StyleKong, Dexuan, Xiefei Zhi, Yan Ji, Chunyan Yang, Yuhong Wang, Yuntao Tian, Gang Li, and Xiaotuan Zeng. 2023. "Precipitation Nowcasting Based on Deep Learning over Guizhou, China" Atmosphere 14, no. 5: 807. https://doi.org/10.3390/atmos14050807