

A Methodology of Retrieving Volume Emission Rate from Limb-Viewed Airglow Emission Intensity by Combining the Techniques of Abel Inversion and Deep Learning
 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Observations and Data
3. Methodology
3.1. Deep Learning
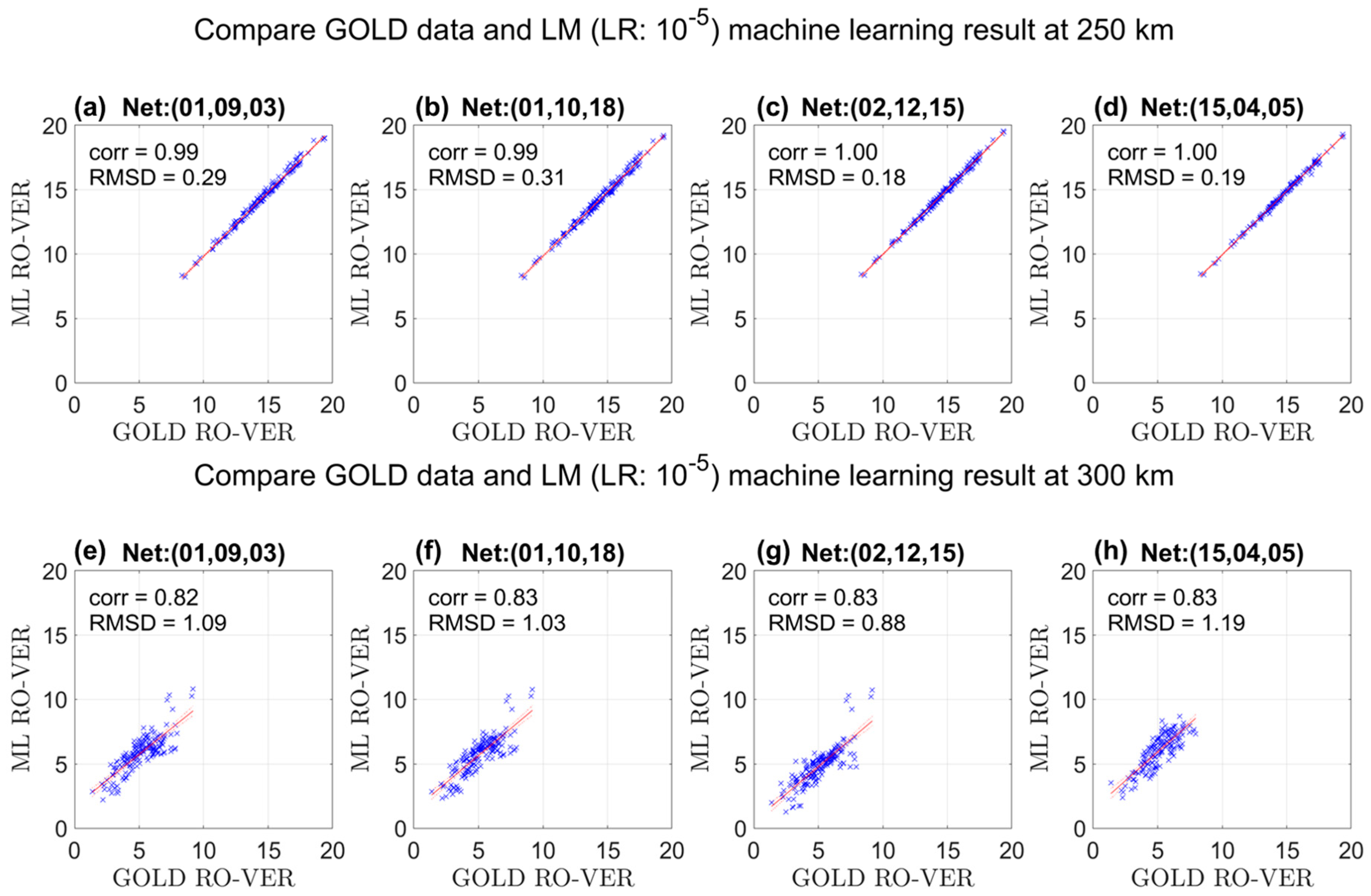
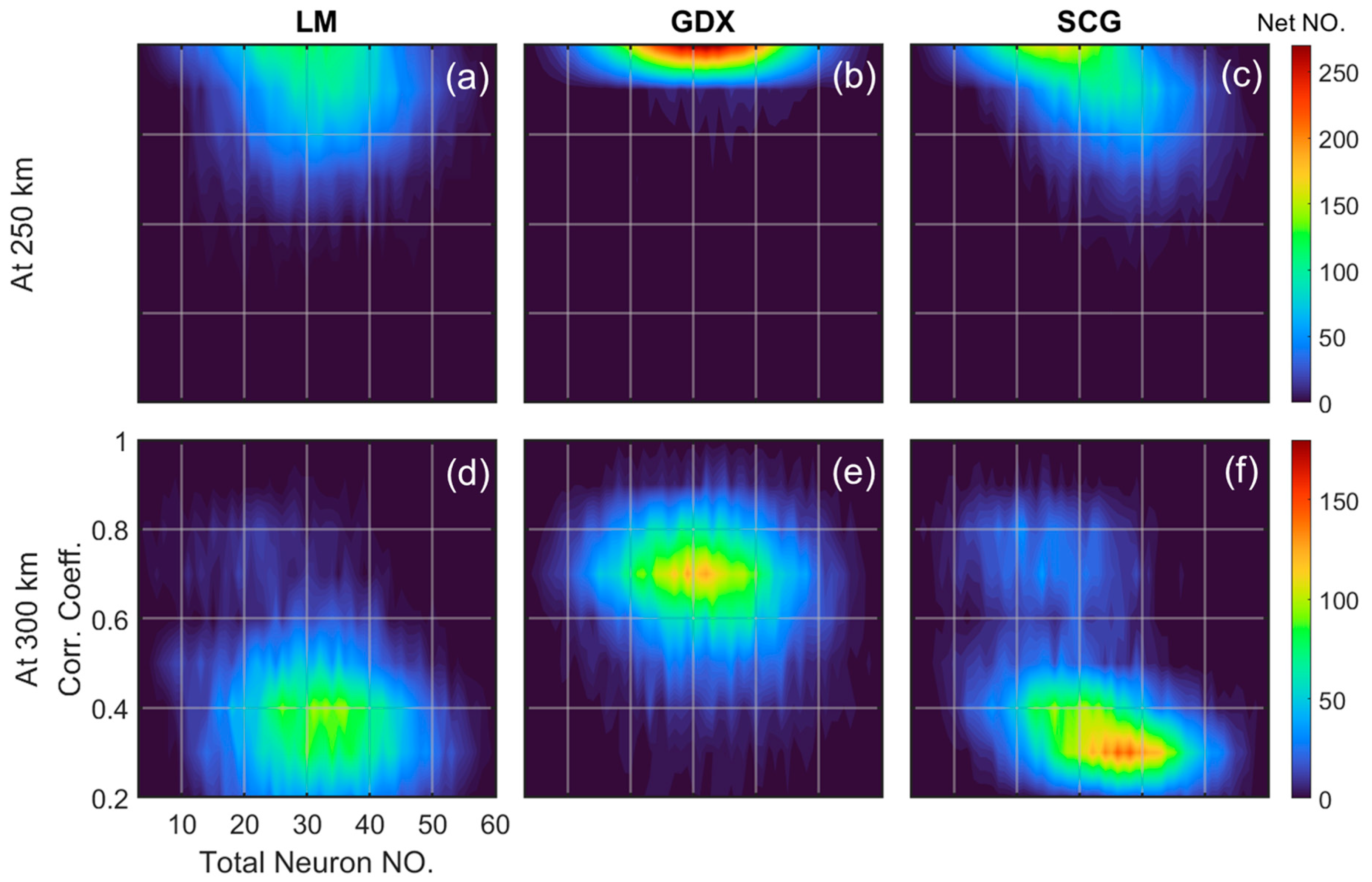
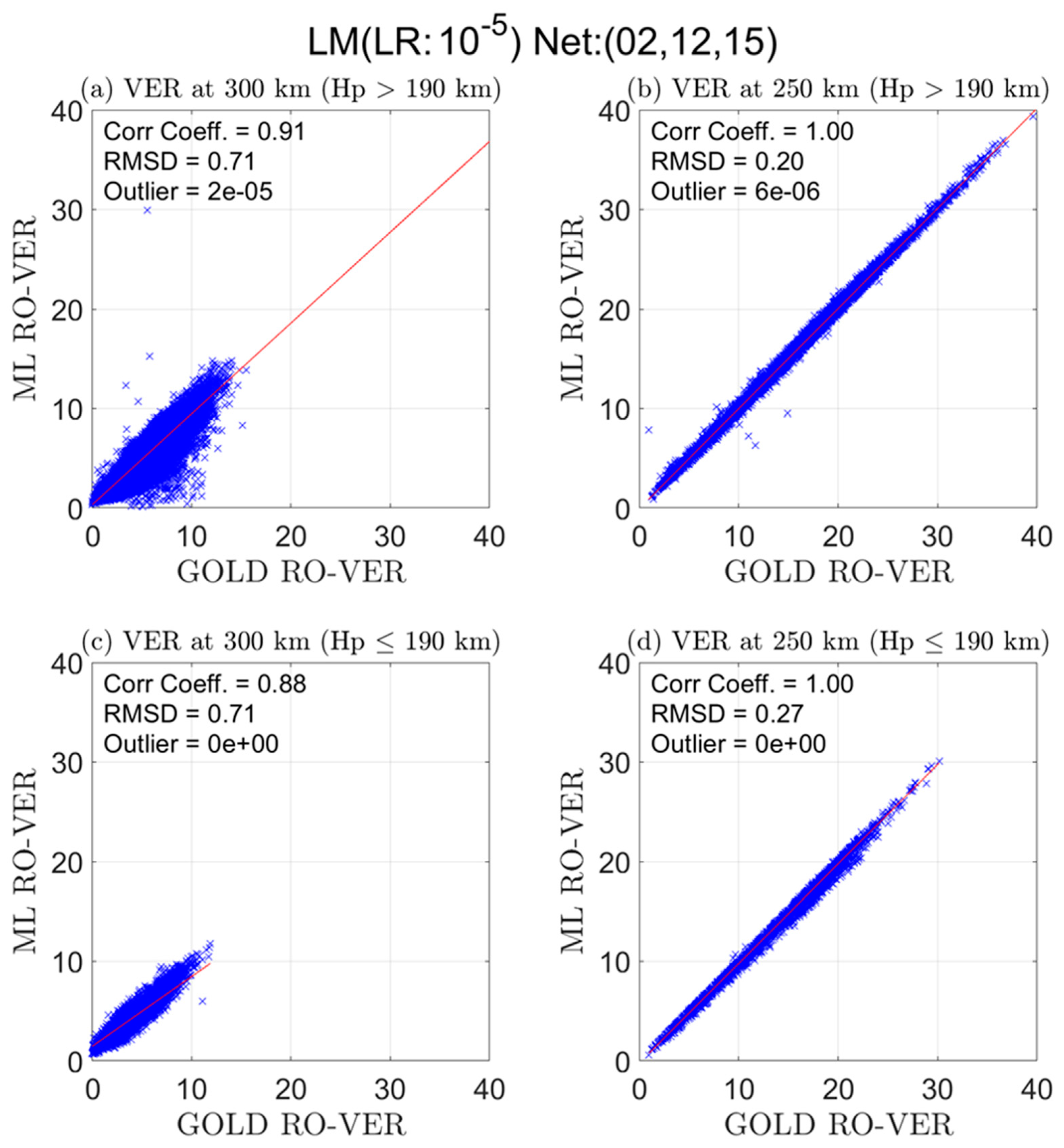
- LM: Levenberg-Marguardt (MATLAB: trainlm)The LM algorithm is the default setup of the feedforwardnet function in MATLAB, it is also known as the damped least-squares method, and can be viewed as a combination of the steepest descent method and the Gauss–Newton algorithm using a trust region approach. LM often converges faster than first-order methods, and it is used in many software applications for solving generic curve-fitting problems [31,32,33]. In short, LM is suitable for training small- and medium-sized problems, and the learning rate is better to be small if it is set as a constant [34].
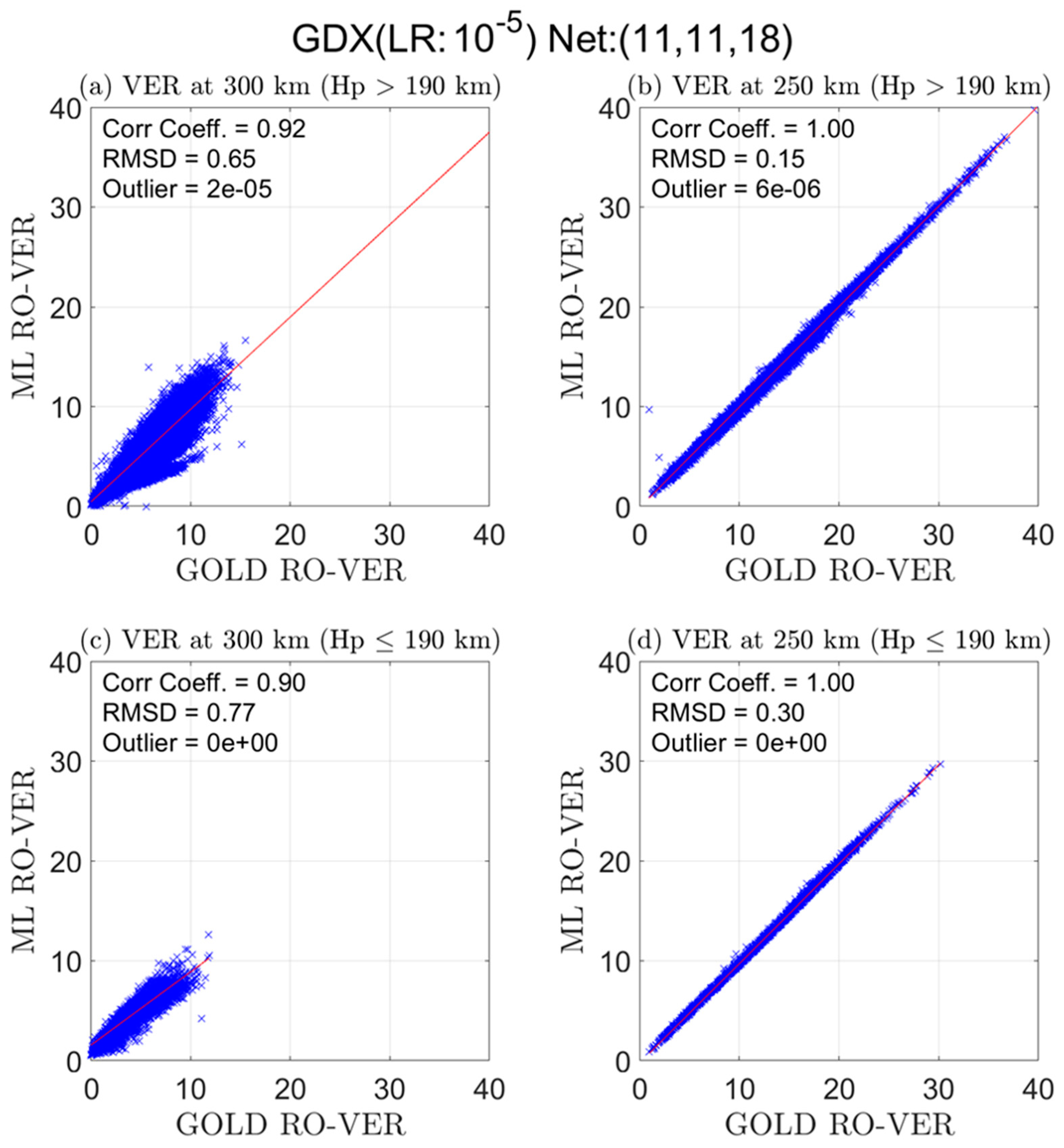
- GDX: Gradient descent with momentum and adaptive learning rate (MATLAB: traingdx)As one of the most popular algorithms to optimize neural networks, the gradient descent (GD) method is commonly used to minimize a cost function, which is a loss function that defines the performance of model prediction for a given set of parameters [35]. According to the equations derived by Ruder (2016) [35], GD obtains the next point from the gradient at the current position and scales it by a learning rate. By optimizing GD with Momentum, this application can solve the issue of the stagnant network resulting from the negligible cost function gradient at saddle points, and accelerate the process in the relevant direction like pushing a ball down a hill (Rauf Bhat, “Gradient Descent With Momentum”, Towards Data Science, 3 October 2020, accessed on 20 October 2022, https://towardsdatascience.com/gradient-descent-with-momentum-59420f626c8f). On the other hand, the learning rate can be considered the most influential hyperparameter in the training; however, choosing a proper learning rate is difficult due to the strong dependence, and the learning rate schedules are defined in advance and unable to adapt to the dataset’s characteristics (Manish Chablani, “Gradient descent algorithms and adaptive learning rate adjustment methods”, Towards Data Science, 14 July 2017, accessed on 20 October 2022, https://towardsdatascience.com/gradient-descent-algorithms-and-adaptive-learning-rate-adjustment-methods-79c701b086be.). The adaptive learning rate method is therefore applied to monitor and adjust learning rate in response for each of the weights in the model (Jason Brownlee, “How to configure the learning rate when training deep learning neural networks”, Deep Learning Performance, 23 January 2019, accessed on 20 October 2022, https://machinelearningmastery.com/learning-rate-for-deep-learning-neural-networks/). In this study, the ratios of increasing and decreasing learning rates are 1.05 and 0.7 as default, respectively.
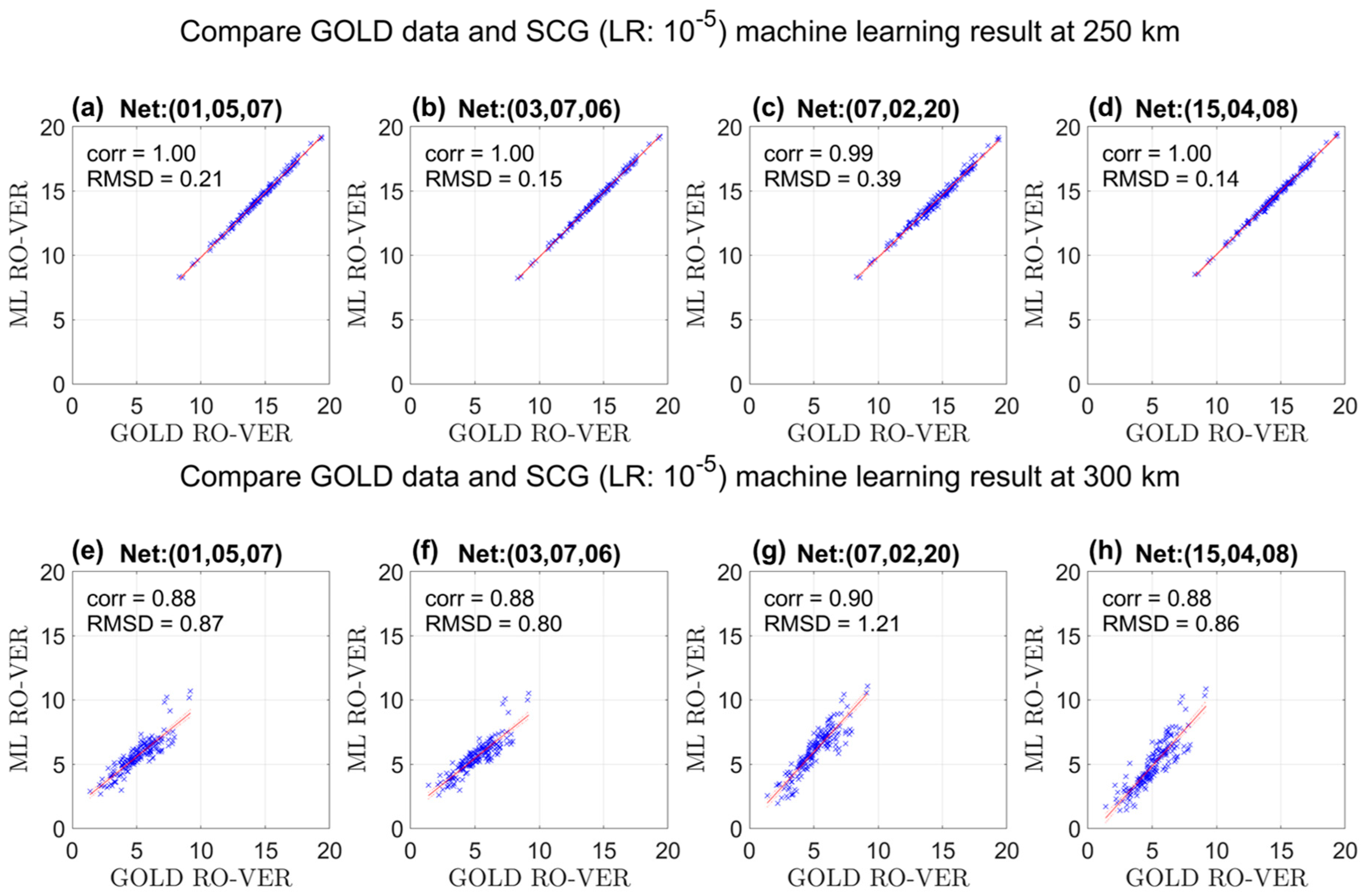
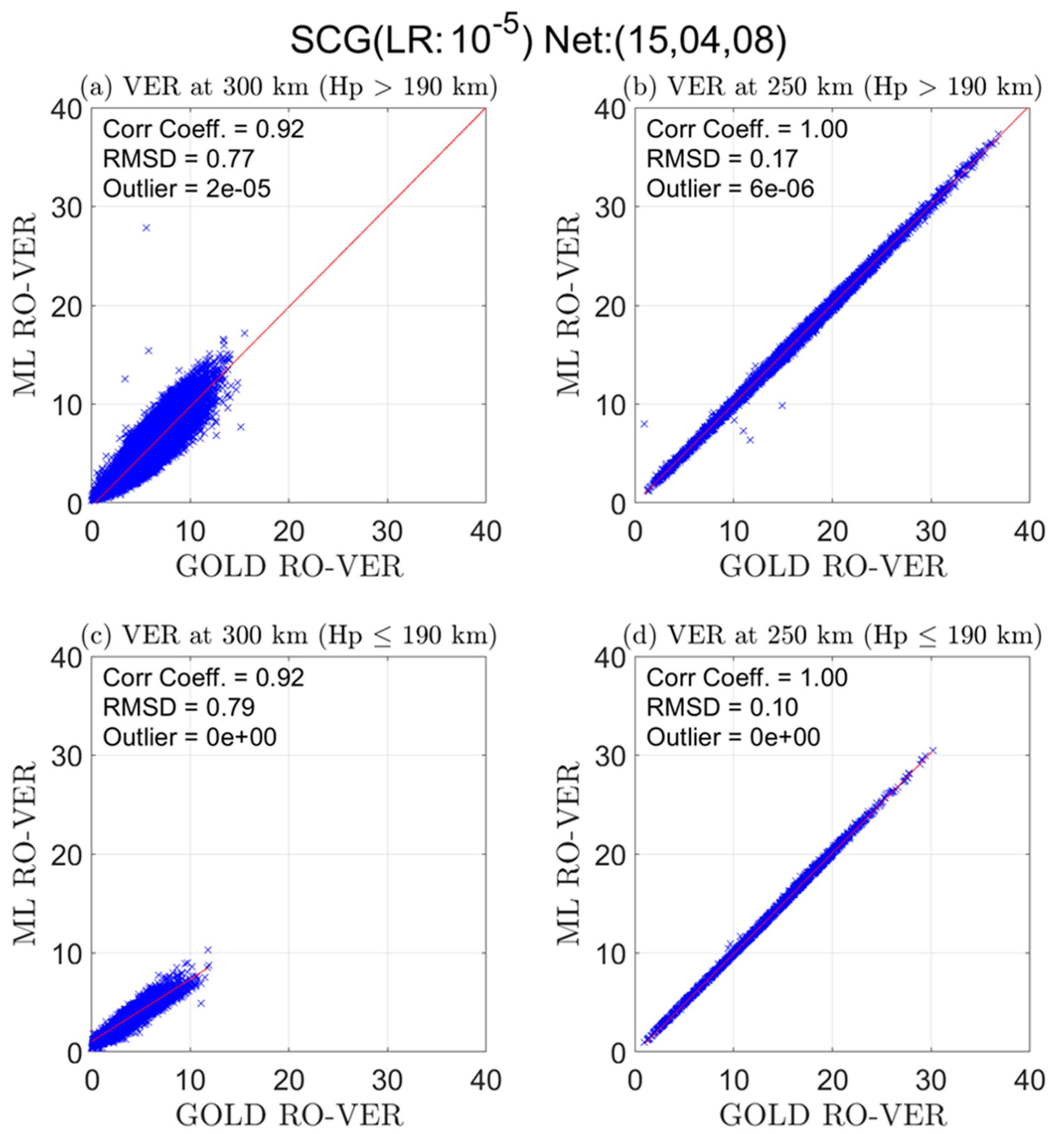
- SCG: Scaled conjugate gradient (MATLAB: trainscg)The conjugate gradient (CG) method is popular for solving large-scale nonlinear problems because it requires very low memory based on the simplicity of the iterations [36]. The scaled conjugate gradient (SCG) algorithm is designed to avoid the time-consuming line search based on conjugate directions [37]. The quadratic approximation of the error function defines the step size and increases the robustness and independency of user-defined parameters in the SCG training process. Notably, CG is recommended only for large problems due to its sensitivity to rounding errors (Albers Uzila, “Complete Step-by-step Conjugate Gradient Algorithm from Scratch”, Towards Data Science, 27 September 2021, accessed on 20 October 2022, https://medium.com/towards-data-science/complete-step-by-step-conjugate-gradient-algorithm-from-scratch-202c07fb52a8).
3.2. Abel Inversion
3.3. Photochemical Inversion Model
4. Results
4.1. The Four Top-Performing Nets
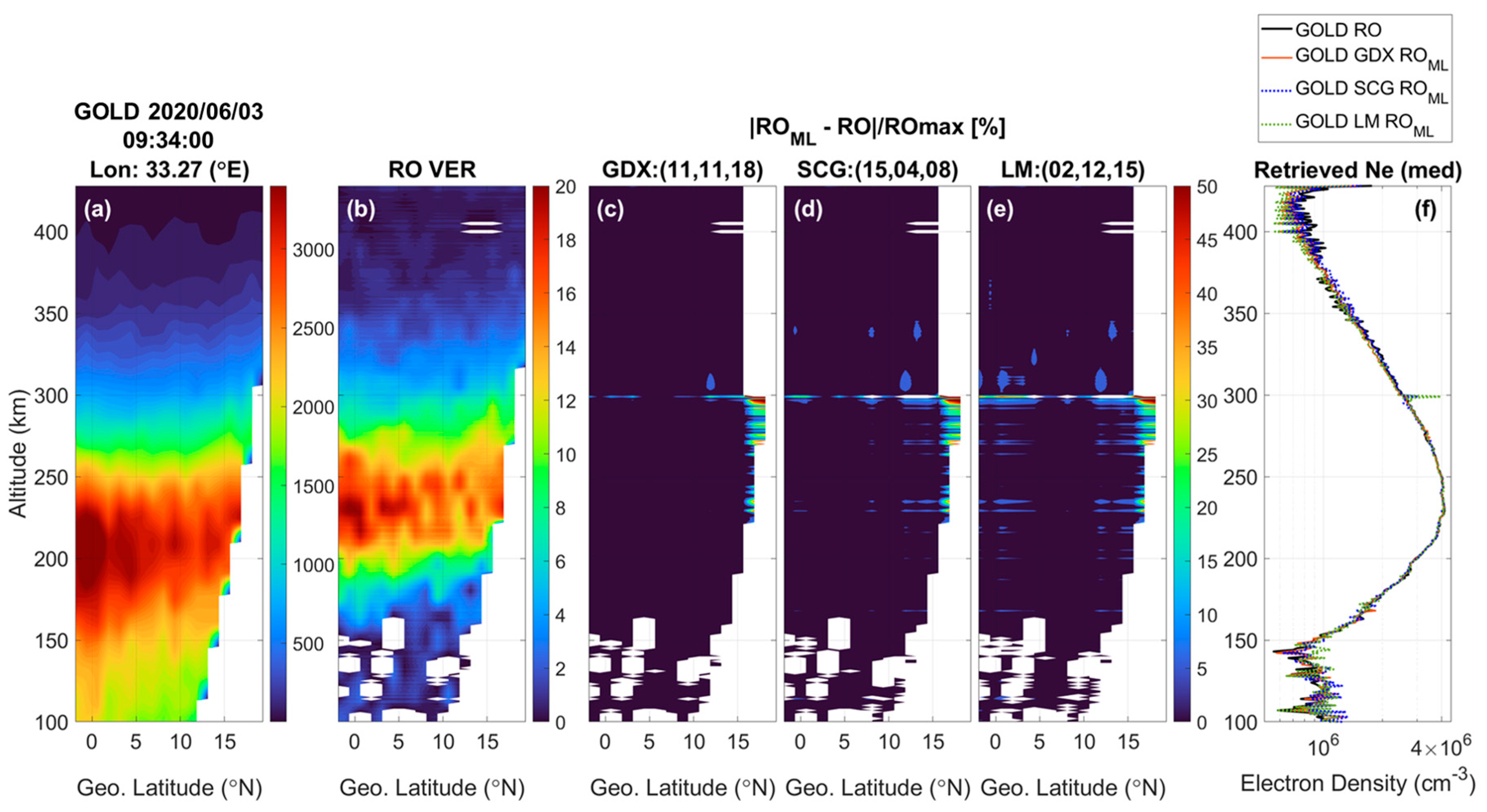
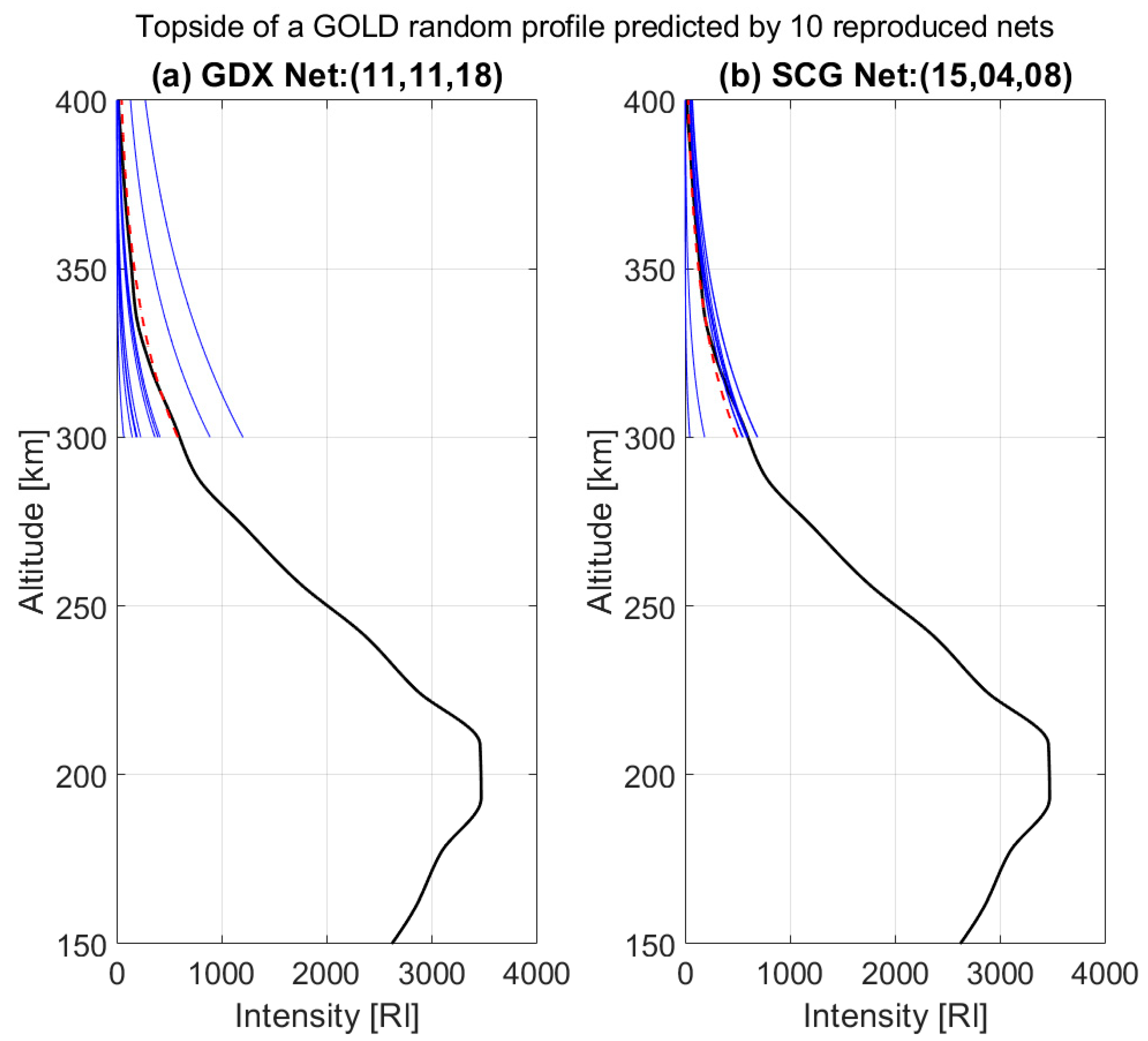
4.2. Best Net of Each Algorithm
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ECEF | Earth-Centered, Earth-Fixed. |
| ICON/FUV | The Ionospheric Connection Explorer Far UltraViolet imager. |
| ISUAL | Imager of Sprites and Upper Atmospheric Lightnings. |
| CG | Conjugate gradient. |
| GD | Gradient descent. |
| GDX | Gradient descent with momentum and adaptive learning rate. |
| GOLD | The NASA Global-scale Observations of the Limb and Disk mission. |
| HDL | Hidden layer. |
| hmF2 | The peak height of the electron density. |
| LM | Levenberg-Marguardt. |
| LR | Learning rate. |
| ML | Machine learning. |
| MSE | Mean Squared Error. |
| Ne | Electron density. |
| RMSD | The root-mean-square deviation. |
| RO | Radio occultation. |
| SCG | Scaled conjugate gradient. |
| STEC | Slant electron content. |
| TEC | Total electron content. |
| UT | Universal Time. |
| VER | Volume emission rate. |
References
- Yue, X.; Schreiner, W.S.; Rocken, C.; Kuo, Y.H. Evaluation of the orbit altitude electron density estimation and its effect on the Abel inversion from radio occultation measurements. Radio Sci. 2011, 46, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Wee, T.K. A variational regularization of Abel transform for GPS radio occultation. Atmos. Meas. Tech. 2018, 11, 1947–1969. [Google Scholar] [CrossRef] [Green Version]
- Ogawa, T.; Balan, N.; Otsuka, Y.; Shiokawa, K.; Ihara, C.; Shimomai, T.; Saito, A. Observations and modeling of 630 nm airglow and total electron content associated with traveling ionospheric disturbances over Shigaraki, Japan. EPS 2002, 54, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Khomich, V.; Semenov, A.; Shefov, N. Airglow as an Indicator of Upper Atmospheric Structure and Dynamics; Springer Science and Business Media: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Meneses, F.; Muralikrishna, P.; Clemesha, B. Height profiles of OI 630 nm and OI 557.7 nm airglow intensities measured via rocket-borne photometers and estimated using electron density data: A comparison. Geofis. Int. 2008, 47, 161–166. [Google Scholar] [CrossRef]
- Rajesh, P.K.; Liu, J.Y.; Hsu, M.L.; Lin, C.H.; Oyama, K.I.; Paxton, L.J. Ionospheric electron content and NmF2 from nighttime OI 135.6 nm intensity. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Vimal, S. Long-Term Changes in Night Time Airglow Emission at 557.7 nm over Mid Latitude Japanese Station i.e., Kiso (35.79° N, 137.63° E). Am. J. Clim. Chang. 2012, 1, 210–216. [Google Scholar] [CrossRef] [Green Version]
- Mende, S.B.; Frey, H.U.; Rider, K.; Chou, C.; Harris, S.E.; Siegmund, O.H.W.; England, S.L.; Wilkins, C.; Craig, W.; Immel, T.J.; et al. The Far Ultra-Violet Imager on the Icon Mission. Space Sci. Rev. 2017, 212, 655–696. [Google Scholar] [CrossRef] [Green Version]
- Laskar, F.I.; Eastes, R.W.; Martinis, C.R.; Daniell, R.E.; Pedatella, N.M.; Burns, A.G.; McClintock, W.; Goncharenko, L.P.; Coster, A.; Milla, M.A.; et al. Early Morning Equatorial Ionization Anomaly From GOLD Observations. J. Geophys. Res. 2020, 125, e2019JA027487. [Google Scholar] [CrossRef]
- Cai, X.; Burns, A.G.; Wang, W.; Qian, L.; Liu, J.; Solomon, S.C.; Eastes, R.W.; Daniell, R.E.; Martinis, C.R.; McClintock, W.E.; et al. Observation of Postsunset OI 135.6 nm Radiance Enhancement Over South America by the GOLD Mission. J. Geophys. Res. 2021, 126, e2020JA028108. [Google Scholar] [CrossRef]
- Rodríguez-Zuluaga, J.; Stolle, C.; Yamazaki, Y.; Xiong, C.; England, S.L. A Synoptic Scale Wavelike Structure in the Nighttime Equatorial Ionization Anomaly. Earth Space Sci. 2021, 8, e01529. [Google Scholar] [CrossRef]
- Tam, S.W.Y.; Chiang, C.Y.; Huang, K.C.; Chang, T.F. Retrieval of Airglow Emission Rates in Analytical Form for Limb-Viewing Satellite Observations at Low Latitudes. J. Geophys. Res. 2021, 126, e2021JA029490. [Google Scholar] [CrossRef]
- Murphy, K. Machine Learning: A Probabilistic Perspective; Adaptive Computation and Machine Learning Series; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Sai Gowtam, V.; Tulasi Ram, S. An Artificial Neural Network-Based Ionospheric Model to Predict NmF2 and hmF2 Using Long-Term Data Set of FORMOSAT-3/COSMIC Radio Occultation Observations: Preliminary Results. J. Geophys. Res. 2017, 122, 11743–11755. [Google Scholar] [CrossRef]
- Thandlam, V.; Venkatramana, K. Enhancing Vertical Resolution of Satellite Atmospheric Profile Data: A Machine Learning Approach. Int. J. Adv. Res. 2018, 6, 542–550. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Z.; Wang, J.; Li, J.; Zhao, B.; Hu, L.; Liu, L. Deep-learning for ionogram automatic scaling. Adv. Space Res. 2020, 66, 942–950. [Google Scholar] [CrossRef]
- Hsieh, M.C.; Huang, G.H.; Dmitriev, A.V.; Lin, C.H. Deep Learning Application for Classification of Ionospheric Height Profiles Measured by Radio Occultation Technique. Remote Sens. 2022, 14, 4521. [Google Scholar] [CrossRef]
- Rajesh, P.K.; Chen, C.H.; Lin, C.H.; Liu, J.Y.; Huba, J.D.; Chen, A.B.; Hsu, R.R.; Chen, Y.T. Low-latitude midnight brightness in 630.0 nm limb observations by FORMOSAT-2/ISUAL. J. Geophys. Res. 2014, 119, 4894–4904. [Google Scholar] [CrossRef]
- Eastes, R.W.; McClintock, W.E.; Burns, A.G.; Anderson, D.N.; Andersson, L.; Aryal, S.; Budzien, S.A.; Cai, X.; Codrescu, M.V.; Correira, J.T.; et al. Initial Observations by the GOLD Mission. J. Geophys. Res. 2020, 125, e27823. [Google Scholar] [CrossRef]
- Solomon, S.C.; Andersson, L.; Burns, A.G.; Eastes, R.W.; Martinis, C.; McClintock, W.E.; Richmond, A.D. Global-Scale Observations and Modeling of Far-Ultraviolet Airglow During Twilight. J. Geophys. Res. 2020, 125, e2019JA027645. [Google Scholar] [CrossRef] [Green Version]
- McClintock, W.E.; Eastes, R.W.; Hoskins, A.C.; Siegmund, O.H.W.; McPhate, J.B.; Krywonos, A.; Solomon, S.C.; Burns, A.G. Global-Scale Observations of the Limb and Disk Mission Implementation: 1. Instrument Design and Early Flight Performance. J. Geophys. Res. 2020, 125, e2020JA027797. [Google Scholar] [CrossRef]
- McClintock, W.E.; Eastes, R.W.; Beland, S.; Bryant, K.B.; Burns, A.G.; Correira, J.; Danielll, R.E.; Evans, J.S.; Harper, C.S.; Karan, D.K.; et al. Global-Scale Observations of the Limb and Disk Mission Implementation: 2. Observations, Data Pipeline, and Level 1 Data Products. J. Geophys. Res. 2020, 125, e2020JA027809. [Google Scholar] [CrossRef]
- Titheridge, J.E. Ionogram analysis: Least squares fitting of a Chapman-layer peak. Radio Sci. 1985, 20, 247–256. [Google Scholar] [CrossRef]
- Chapman, S. The absorption and dissociative or ionizing effect of monochromatic radiation in an atmosphere on a rotating earth part II. Grazing incidence. Proc. Phys. Soc. 1931, 43, 483–501. [Google Scholar] [CrossRef]
- Chapman, S. Note on the Grazing-Incidence Integral Ch(X,χ) for Monochromatic Absorption in an Exponential Atmosphere. Proc. Phys. Soc. Sect. B 1953, 66, 710–712. [Google Scholar] [CrossRef]
- Lagos, P.; Bellew, W.; Silverman, S.M. The airglow 6300 [OI] emission theoretical considerations on the luminosity profile. J. Atmos. Terr. Phys. 1963, 25, 581–587. [Google Scholar] [CrossRef]
- Hargreaves, J.K. The Solar-Terrestrial Environment; Cambridge Univ. Press: New York, NY, USA, 1992. [Google Scholar]
- Stankov, S.M.; Jakowski, N.; Heise, S.; Muhtarov, P.; Kutiev, I.; Warnant, R. A new method for reconstruction of the vertical electron density distribution in the upper ionosphere and plasmasphere. J. Geophys. Res. 2003, 108, 1164. [Google Scholar] [CrossRef]
- Kil, H.; Lee, W.K.; Shim, J.; Paxton, L.J.; Zhang, Y. The effect of the 135.6 nm emission originated from the ionosphere on the TIMED/GUVI O/N2 ratio. J. Geophys. Res. 2013, 118, 859–865. [Google Scholar] [CrossRef]
- Cai, X.; Burns, A.G.; Wang, W.; Coster, A.; Qian, L.; Liu, J.; Solomon, S.C.; Eastes, R.W.; Daniell, R.E.; McClintock, W.E. Comparison of GOLD Nighttime Measurements With Total Electron Content: Preliminary Results. J. Geophy. Res. 2020, 125, e2019JA027767. [Google Scholar] [CrossRef]
- Wilamowski, B.M.; Yu, H. Improved Computation for Levenberg–Marquardt Training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef]
- Transtrum, M.K.; Sethna, J.P. Improvements to the Levenberg-Marquardt algorithm for nonlinear least-squares minimization. arXiv 2012, arXiv:1201.5885. [Google Scholar] [CrossRef]
- Gavin, H.P. The Levenberg-Marquardt Algorithm for Nonlinear Least Squares Curve-Fitting Problems; Duke University: Durham, NC, USA, 2019; Volume 19. [Google Scholar]
- Yu, H.; Wilamowski, B.M. Intelligent Systems: Levenberg-Marquardt Training; CRC Press: Boca Raton, FL, USA, 2018; pp. 1–16. [Google Scholar] [CrossRef]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Yao, S.; Lu, X.; Wei, Z. A Conjugate Gradient Method with Global Convergence for Large-Scale Unconstrained Optimization Problems. J. Appl. Math. 2013, 2013, 730454. [Google Scholar] [CrossRef] [Green Version]
- Babani, L.; Jadhav, S.; Chaudhari, B. Scaled Conjugate Gradient Based Adaptive ANN Control for SVM-DTC Induction Motor Drive. In Proceedings of the Artificial Intelligence Applications and Innovations, Thessaloniki, Greece, 16–18 September 2016; Iliadis, L., Maglogiannis, I., Eds.; IFIP Advances in Information and Communication Technology; Springer: Berlin/Heidelberg, Germany, 2016; Volume 475, pp. 384–395. [Google Scholar] [CrossRef] [Green Version]
- Baker, D.J.; Romick, G.J. The rayleigh: Interpretation of the unit in terms of column emissionrate or apparent radiance expressed in SI units. Appl. Opt. 1976, 15, 1966–1968. [Google Scholar] [CrossRef]
- Lin, C.Y.; Lin, C.C.H.; Liu, J.Y.; Rajesh, P.K.; Matsuo, T.; Chou, M.Y.; Tsai, H.F.; Yeh, W.H. The Early Results and Validation of FORMOSAT-7/COSMIC-2 Space Weather Products: Global Ionospheric Specification and Ne-Aided Abel Electron Density Profile. J. Geophys. Res. 2020, 125, e2020JA028028. [Google Scholar] [CrossRef]
- Hanson, W.B. Radiative recombination of atomic oxygen ions in the nighttime F region. J. Geophys. Res. 1969, 74, 3720–3722. [Google Scholar] [CrossRef]
- Knudsen, W.C. Tropical ultraviolet nightglow from oxygen ion-ion neutralization. J. Geophys. Res. 1970, 75, 3862. [Google Scholar] [CrossRef]
- Hanson, W.B. A comparison of the oxygen ion-ion neutralization and radiative recombination mechanisms for producing the ultraviolet nightglow. J. Geophys. Res. 1970, 75, 4343–4346. [Google Scholar] [CrossRef]
- Tinsley, B.A.; Christensen, A.B.; Bittencourt, J.; Gouveia, H.; Angreji, P.D.; Takahashi, H. Excitation of oxygen permitted line emissions in the tropical nightglow. J. Geophys. Res. 1973, 78, 1174–1186. [Google Scholar] [CrossRef] [Green Version]
- Meléndez-Alvira, D.J.; Meier, R.R.; Picone, J.M.; Feldman, P.D.; McLaughlin, B.M. Analysis of the oxygen nightglow measured by the Hopkins Ultraviolet Telescope: Implications for ionospheric partial radiative recombination rate coefficients. J. Geophys. Res. 1999, 47, 14901–14913. [Google Scholar] [CrossRef]
- Qin, J.; Makela, J.J.; Kamalabadi, F.; Meier, R.R. Radiative transfer modeling of the OI 135.6 nm emission in the nighttime ionosphere. J. Geophys. Res. 2015, 120, 10116–10135. [Google Scholar] [CrossRef]
- Picone, J.M.; Hedin, A.E.; Drob, D.P.; Aikin, A.C. NRLMSISE-00 empirical model of the atmosphere: Statistical comparisons and scientific issues. J. Geophys. Res. 2002, 107, SIA 15-1–SIA 15-16. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Eastes, R.W.; Solomon, S.C.; Daniell, R.E.; Anderson, D.N.; Burns, A.G.; England, S.L.; Martinis, C.R.; McClintock, W.E. Global-Scale Observations of the Equatorial Ionization Anomaly. Geophys. Res. Lett. 2019, 46, 9318–9326. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Initial | Stop | Step | Unit |
|---|---|---|---|---|---|
| c | Chapman type coefficient | 0.5 | 1.5 | 0.1 | - |
| Thickness | 30.0 | 50.0 | 1.0 | km | |
| The height of peak intensity | 190.0 | 280.0 | 1.0 | km |
| Symbol | Value | Unit | Description |
|---|---|---|---|
| cms | Radiative recombination rate of the 135.6 nm emission (Equation (4)). | ||
| 0.54 | Fraction of the 135.6 nm emission yielded by ion-ion recombination (Equation (9)). | ||
| cms | Production rate of (Equation (6)). | ||
| cms | Production rate of (Equation (7)). | ||
| cms | Loss rate of (Equation (8)). |
| GDX | SCG | LM | |
|---|---|---|---|
| Number of Nets Above Threshold * | 250 | 92 | 28 |
| Training Speed Ranking | 1 | 2 | 3 |
| Overall Ranking | 1 | 2 | 3 |
| Selected Net | (11, 11, 18) | (15, 04, 08) | (02, 12, 15) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duann, Y.; Chang, L.C.; Lin, C.-Y.; Hsieh, Y.-C.; Wen, Y.-C.; Lin, C.C.H.; Liu, J.-Y. A Methodology of Retrieving Volume Emission Rate from Limb-Viewed Airglow Emission Intensity by Combining the Techniques of Abel Inversion and Deep Learning. Atmosphere 2023, 14, 74. https://doi.org/10.3390/atmos14010074
Duann Y, Chang LC, Lin C-Y, Hsieh Y-C, Wen Y-C, Lin CCH, Liu J-Y. A Methodology of Retrieving Volume Emission Rate from Limb-Viewed Airglow Emission Intensity by Combining the Techniques of Abel Inversion and Deep Learning. Atmosphere. 2023; 14(1):74. https://doi.org/10.3390/atmos14010074
Chicago/Turabian StyleDuann, Yi, Loren C. Chang, Chi-Yen Lin, Yueh-Chun Hsieh, Yun-Cheng Wen, Charles C. H. Lin, and Jann-Yenq Liu. 2023. "A Methodology of Retrieving Volume Emission Rate from Limb-Viewed Airglow Emission Intensity by Combining the Techniques of Abel Inversion and Deep Learning" Atmosphere 14, no. 1: 74. https://doi.org/10.3390/atmos14010074