Efficient Regional Hybrid Ensemble-Variational Data Assimilation using the Global-Ensemble-Model-Augmented Error Covariance for Numerical Weather Prediction over Eastern China

Abstract
:1. Introduction
2. Methodology
2.1. The Hybrid EnVar and ETKF Schemes
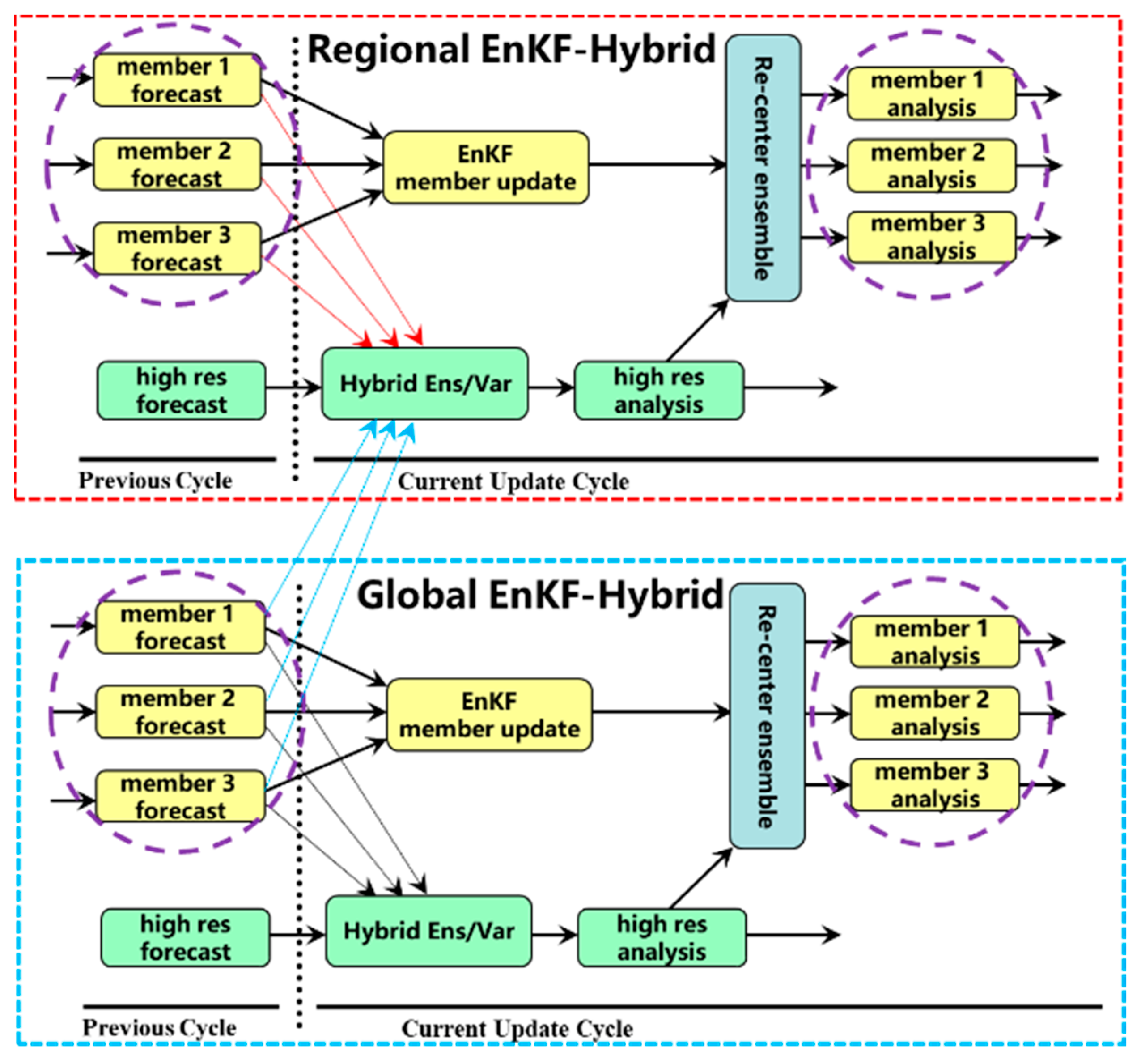
2.2. The Globally Augmented Regional Hybrid EnVar Method
2.3. The NCEP Global Ensemble and Its Process for WRFDA
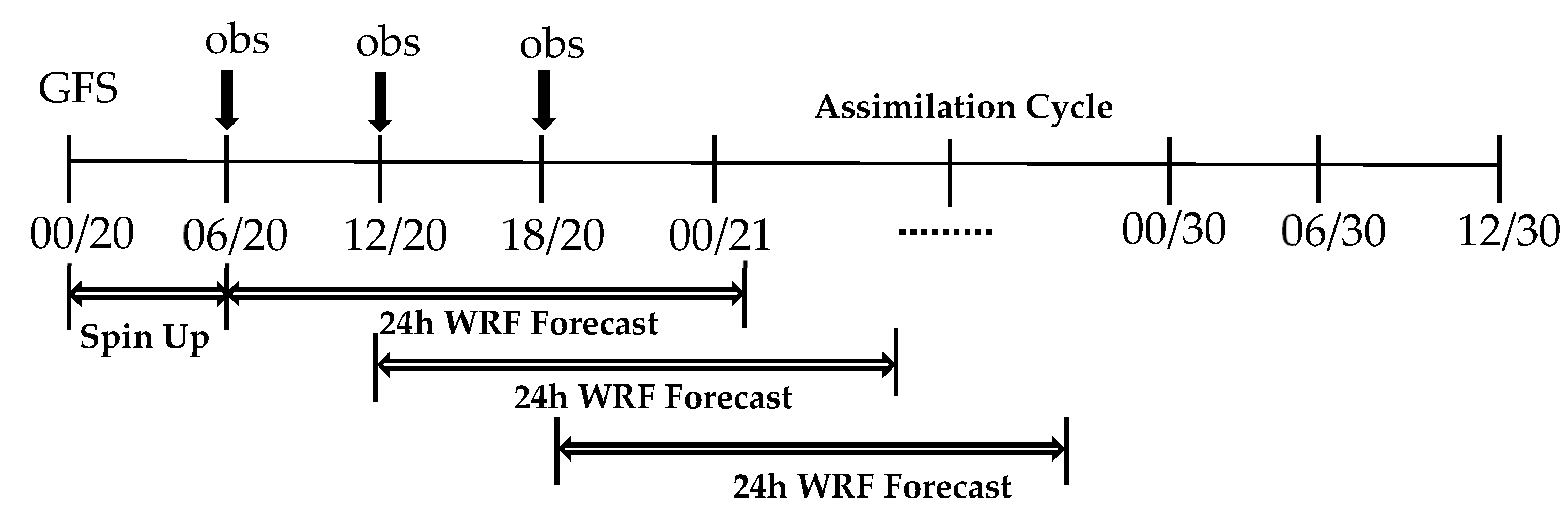
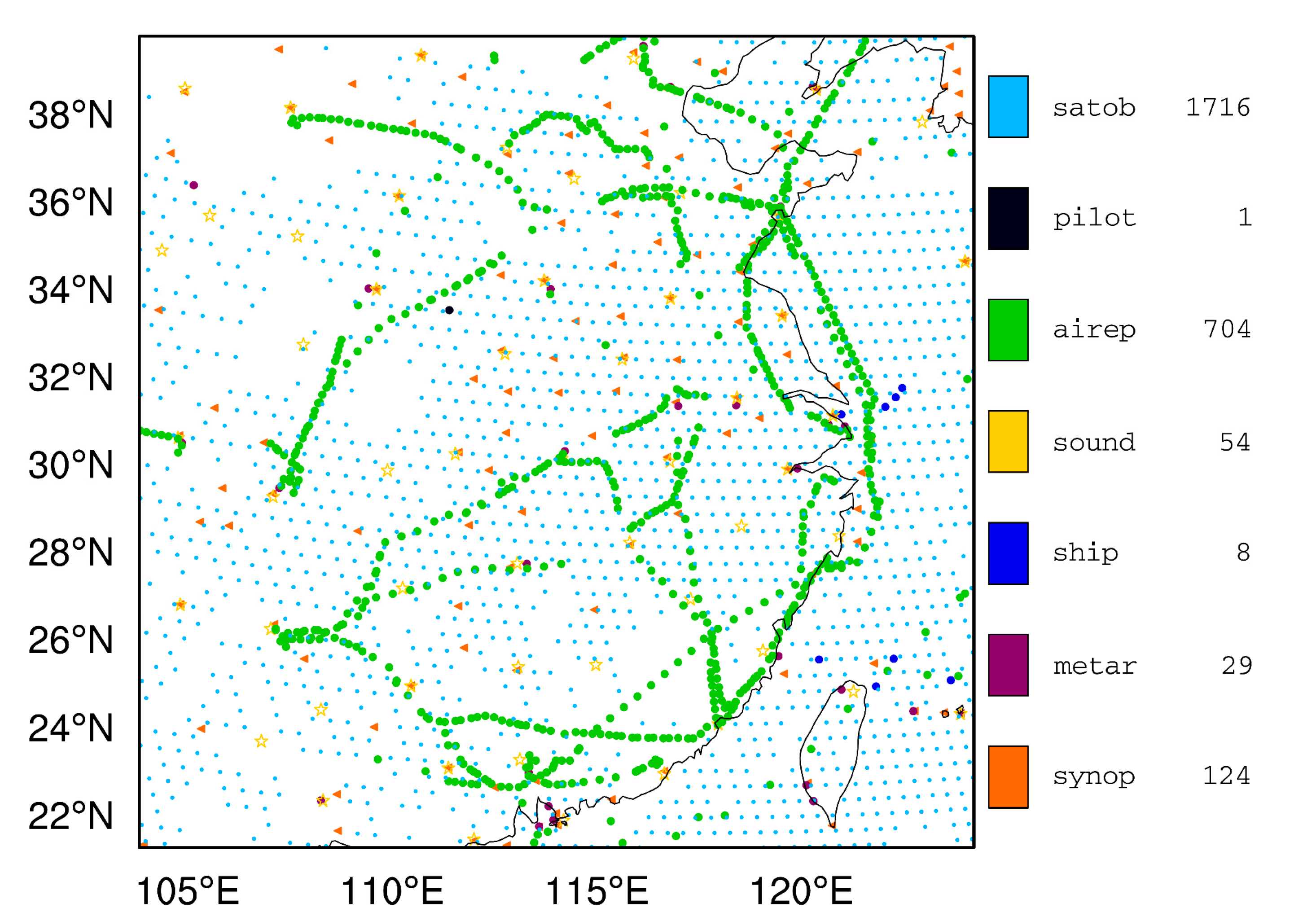
3. Experiment Designs and Configurations
4. Results
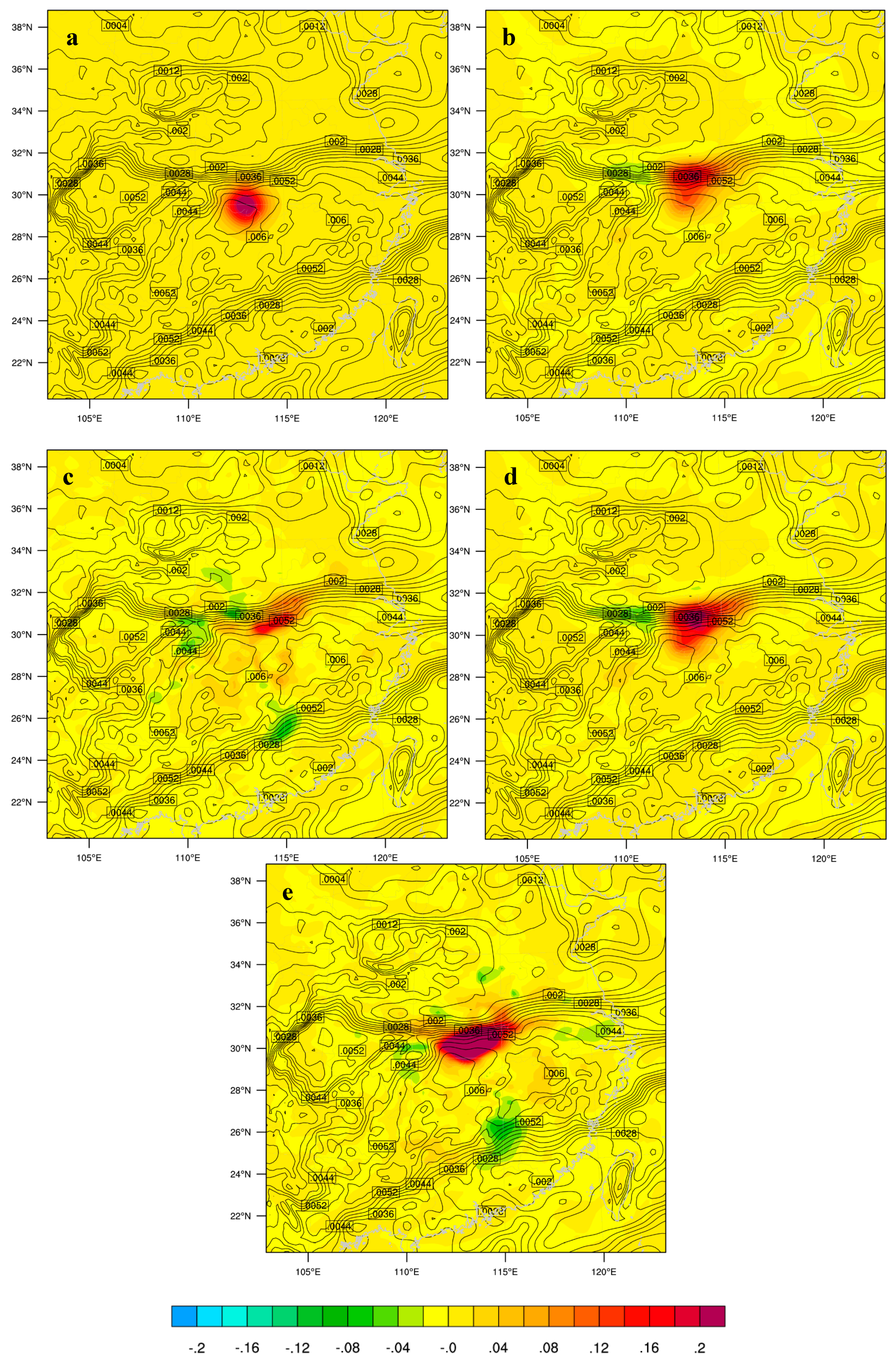
4.1. Single Observation Test
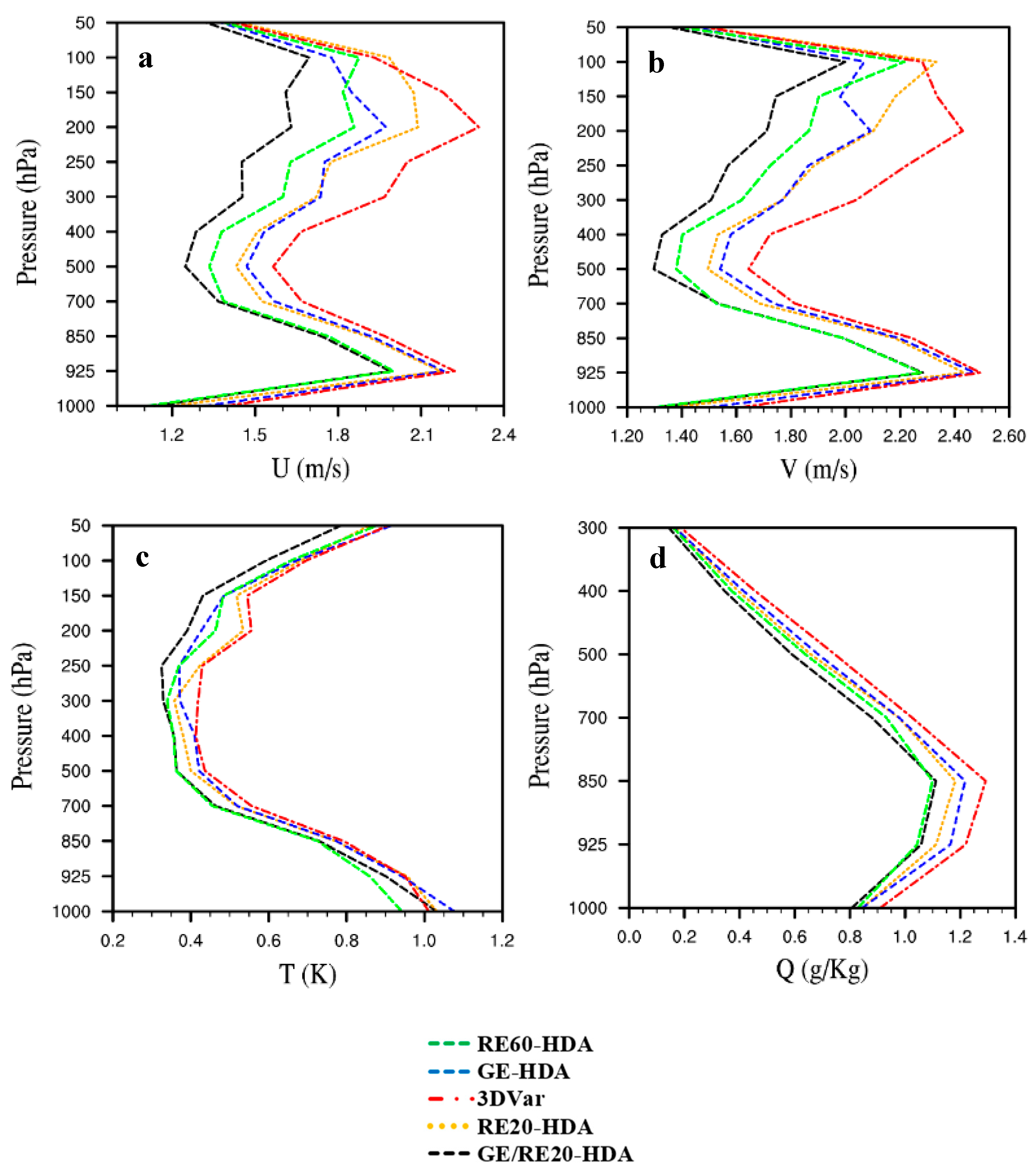
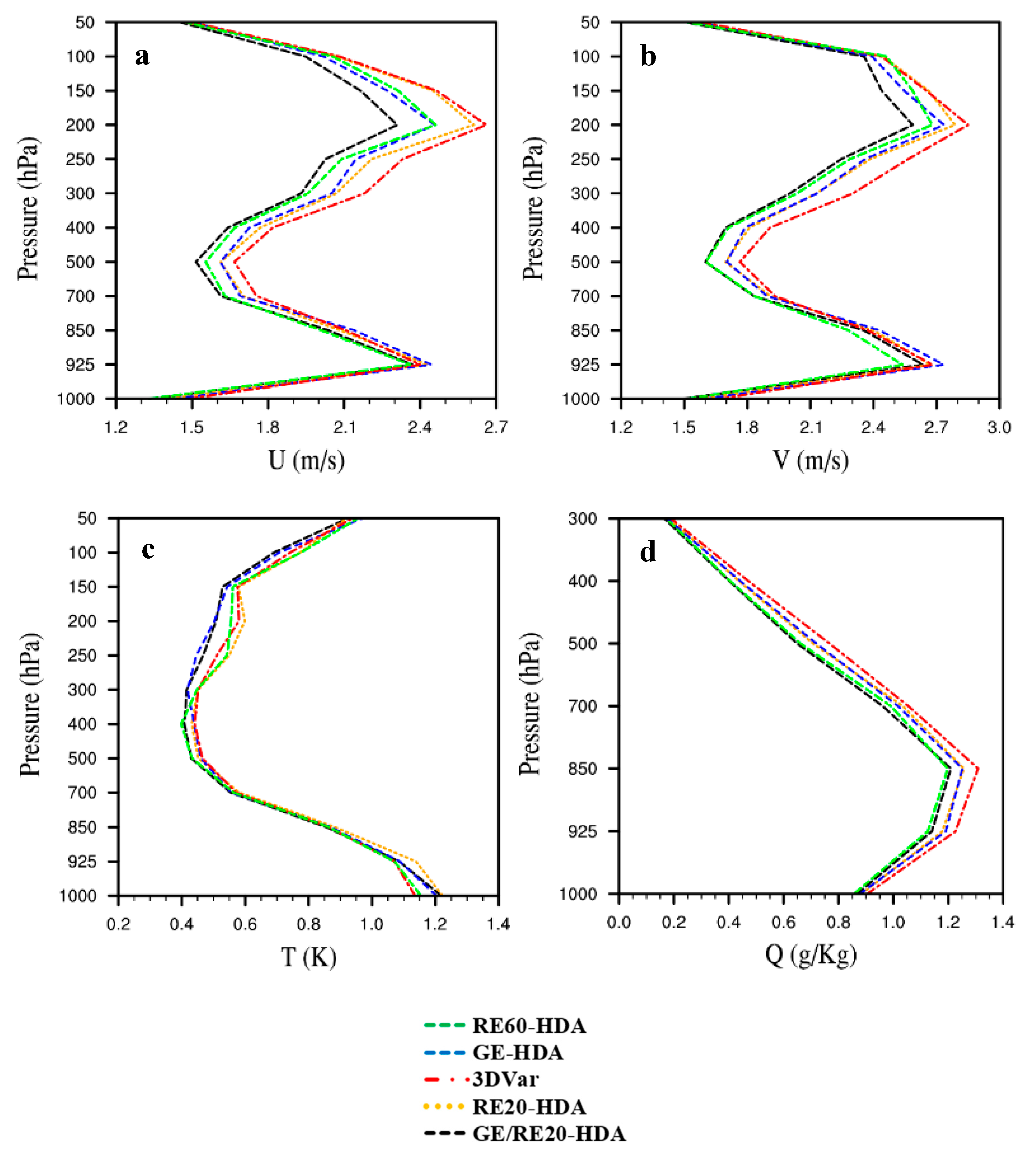
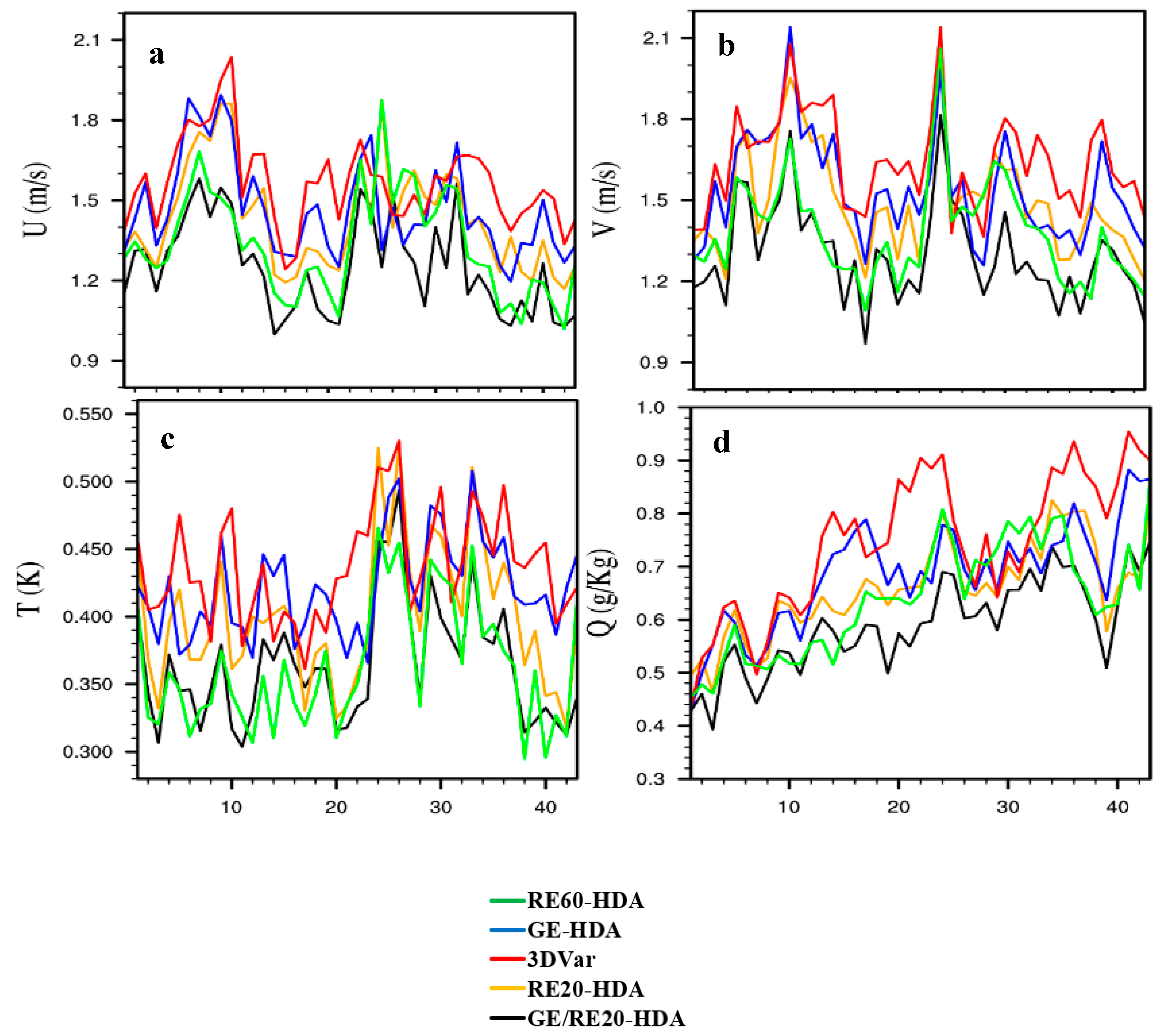
4.2. Verification against the European Centre for Medium-Range Weather Forecasts (ECMWF) Analysis
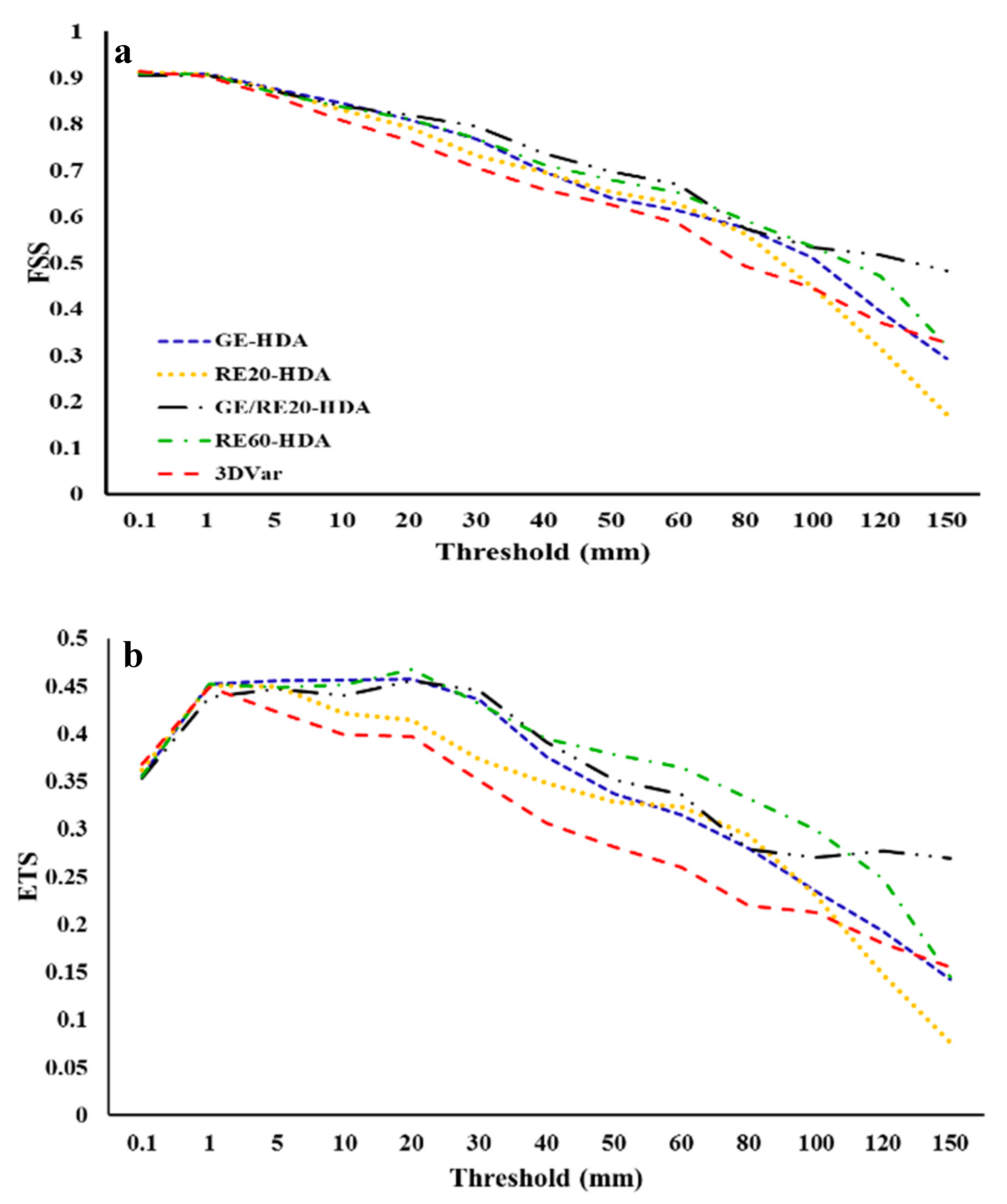
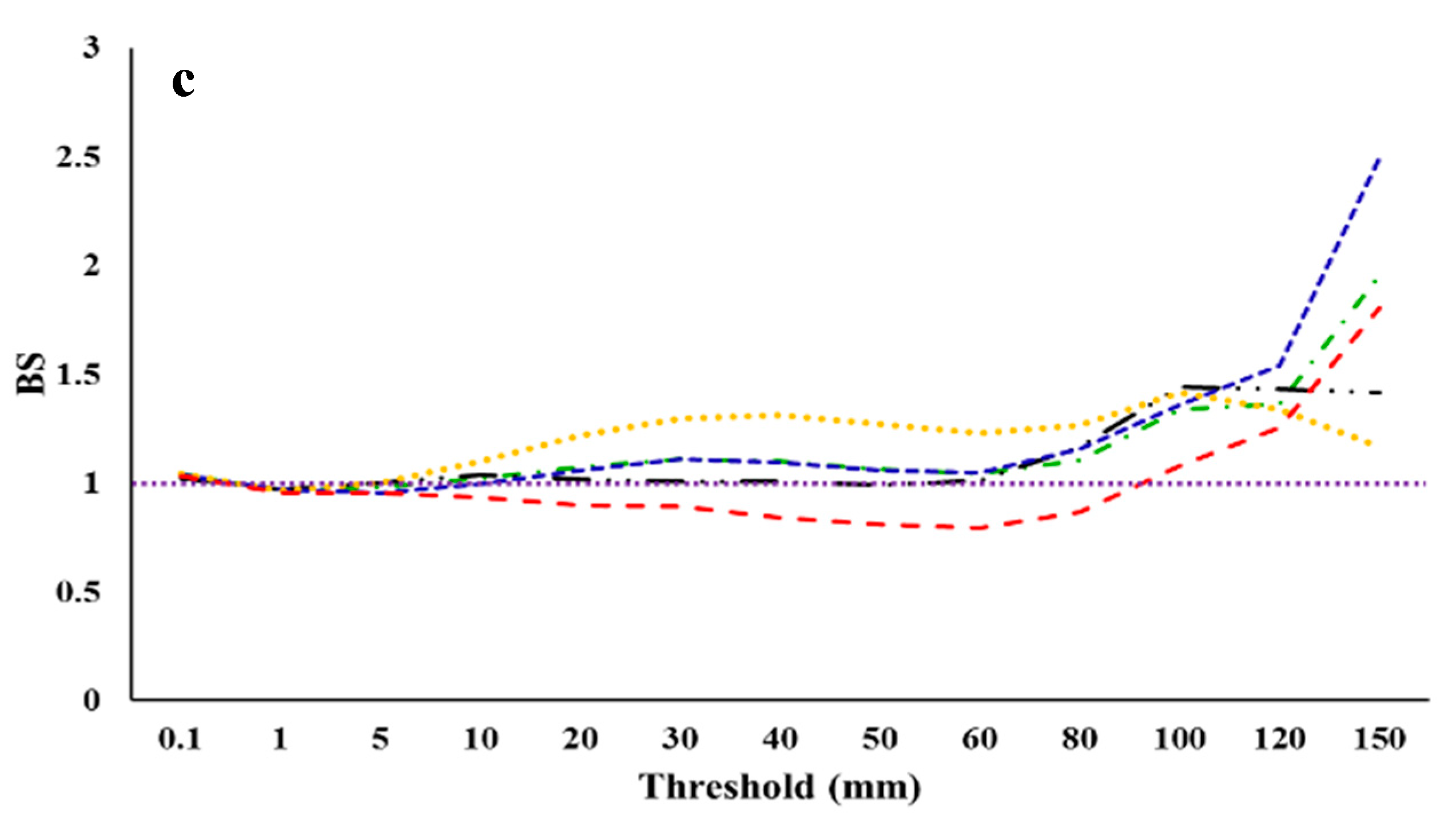
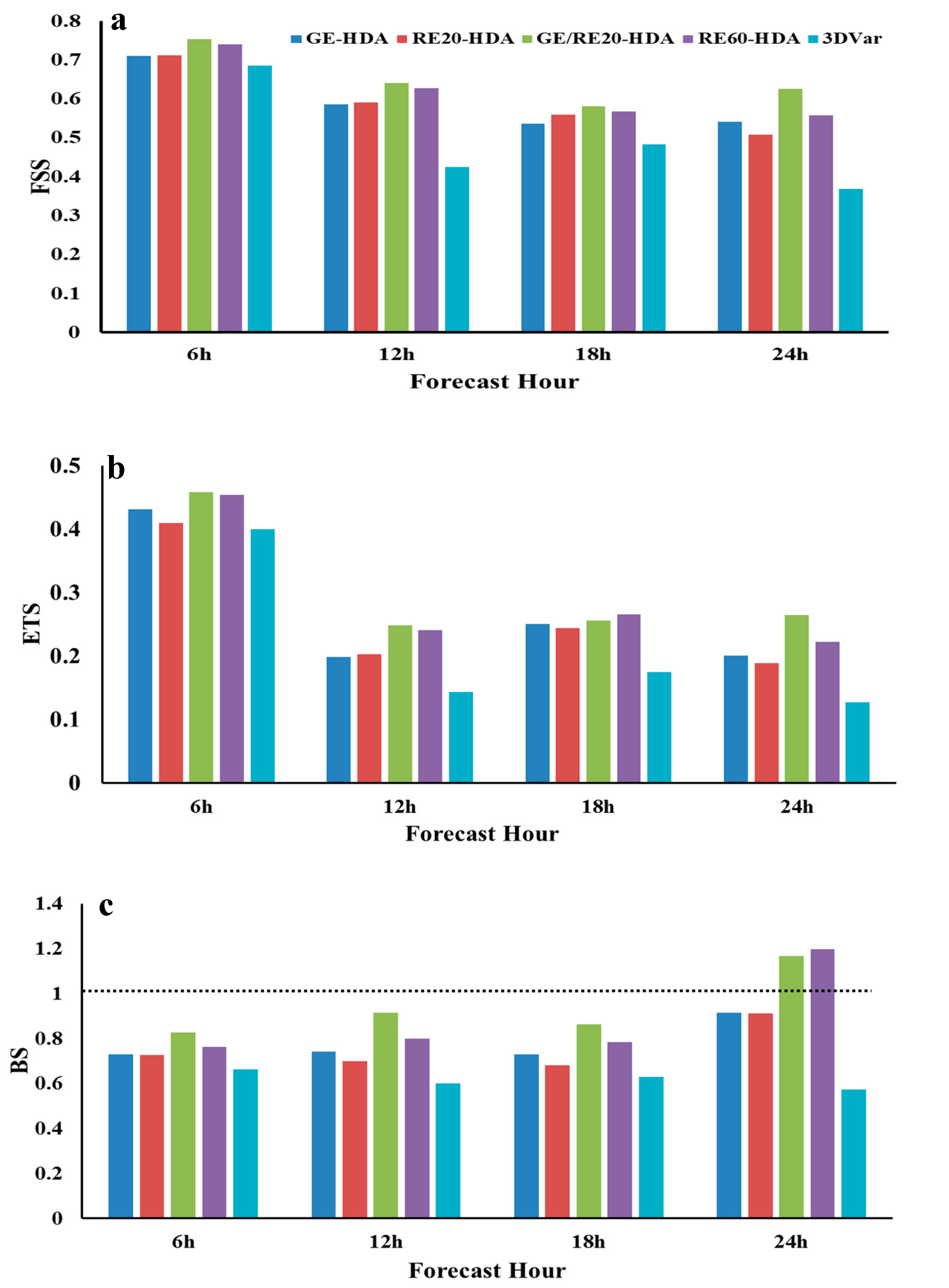
4.3. Rainfall Forecast Skill Scores
4.4. Computational Cost Analysis
5. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bannister, R.N. A review of operational methods of variational and ensemble-variational data assimilation. Q. J. Roy. Meteor. Soc. 2017, 143, 607–633. [Google Scholar] [CrossRef] [Green Version]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s spectral statistical-interpolation analysis system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Barker, D.M. Southern high-latitude ensemble data assimilation in the Antarctic mesoscale prediction system. Mon. Weather Rev. 2005, 133, 3431–3449. [Google Scholar] [CrossRef]
- Descombes, G.; Aulign’e, T.; Vandenberghe, F.; Barker, D.M.; Barr´e, J. Generalized background error covariance matrix model (GEN BE v2.0). Geosci. Model Dev. 2015, 8, 669–696. [Google Scholar] [CrossRef] [Green Version]
- Hamill, T.M.; Snyder, C. A hybrid ensemble Kalman filter-3D variational analysis scheme. Mon. Weather Rev. 2000, 128, 2905–2919. [Google Scholar] [CrossRef]
- Lorenc, A.C. The potential of the ensemble Kalman filter for NWP-a comparison with 4D-Var. Q. J. R. Meteorol. Soc. 2003, 129, 3183–3203. [Google Scholar] [CrossRef]
- Wang, X.G.; Parrish, D.; Kleist, D.; Whitaker, J. GSI 3DVar-based ensemble–variational hybrid data assimilation for NCEP global forecast system: Single-resolution experiments. Mon. Weather Rev. 2013, 141, 4098–4117. [Google Scholar] [CrossRef]
- Caron, J.F.; Milewski, T.; Buehner, M.; Fillion, L.; Reszka, M.; Macpherson, S.; St-James, J. Implementation of deterministic weather forecasting systems based on ensemble–variational data assimilation at Environment Canada. Part II: The regional system. Mon. Weather Rev. 2015, 143, 2560–2580. [Google Scholar] [CrossRef]
- Kleist, D.T.; Ide, K. An OSSE-based evaluation of hybrid variational-ensemble data assimilation for the NCEP GFS. Part II: 4DEnVar and hybrid variants. Mon. Weather Rev. 2015, 143, 452–470. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.G.; Barker, D.M.; Snyder, C.; Hamill, T.M. A hybrid ETKF-3DVAR data assimilation scheme for the WRF model. Part I: Observing system simulation experiment. Mon. Weather Rev. 2008, 136, 5132–5147. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Zhang, M.; Poterjoy, J. E3DVar: Coupling an Ensemble Kalman Filter with Three-Dimensional Variational Data Assimilation in a Limited-Area Weather Prediction Model and Comparison to E4DVar. Mon. Weather Rev. 2013, 141, 900–917. [Google Scholar] [CrossRef]
- Schwartz, C.S.; Liu, Z. Convection-permitting forecasts initialized with continuously cycling limited-area 3DVar, ensemble Kalman filter, and “Hybrid” variational–ensemble data assimilation systems. Mon. Weather Rev. 2014, 142, 716–738. [Google Scholar] [CrossRef]
- Schwartz, C.S.; Liu, Z.; Huang, X.-Y. Sensitivity of limited-area hybrid variational-ensemble analyses and forecasts to ensemble perturbation resolution. Mon. Weather Rev. 2015, 143, 3454–3477. [Google Scholar] [CrossRef]
- Hamill, T.M.; Whitaker, J.S.; Snyder, C. Distance-dependent filtering of background error covariance estimates in an ensemble Kalman filter. Mon. Weather Rev. 2001, 129, 2776–2790. [Google Scholar] [CrossRef] [Green Version]
- Miyoshi, T.; Kondo, K.; Imamura, T. The 10240-member ensemble Kalman filtering with an intermediate AGCM. Geophys. Res. Lett. 2014, 41, 5264–5271. [Google Scholar] [CrossRef]
- Kondo, K.; Miyoshi, T. Impact of removing covariance localization in an ensemble Kalman filter: Experiments with 10240 members using an intermediate AGCM. Mon. Weather Rev. 2016, 144, 4849–4865. [Google Scholar] [CrossRef]
- Anderson, J.L. Reducing correlation sampling error in Ensemble Kalman Filter data assimilation. Mon. Weather Rev. 2016, 144, 913–925. [Google Scholar] [CrossRef]
- Xu, Q.; Lu, H.; Gao, S.; Xue, M.; Tong, M. Time-expanded sampling for ensemble Kalman filter: Assimilation experiments with simulated radar observations. Mon. Weather Rev. 2008, 136, 2651–2667. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Xu, Q.; Jin, Y.; McLay, J.; Reynolds, C. Time-expanded sampling for ensemble-based data assimilation applied to conventional and satellite observations. Weather Forecast. 2015, 30, 855–872. [Google Scholar] [CrossRef] [Green Version]
- Gustafsson, N.; Bojarova, J.; Vignes, O. A hybrid variational ensemble data assimilation for the HIgh Resolution Limited Area Model (HIRLAM). Nonlinear Proc. Geoph. 2014, 21, 303–323. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Min, J.; Chen, Y.; Huang, X.-Y.; Zeng, M.; Li, X. Improving precipitation forecast with hybrid 3DVar and time-lagged ensembles in a heavy rainfall event. Atmos. Res. 2017, 183, 1–16. [Google Scholar] [CrossRef]
- Kretschmer, M.; Hunt, B.R.; Ott, E. Data assimilation using a climatologically augmented local ensemble transform Kalman filter. Tellus A 2015, 67, 26617. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Xue, M. An efficient dual-resolution approach for ensemble data assimilation and tests with simulated Doppler radar data. Mon. Weather Rev. 2008, 136, 945–963. [Google Scholar] [CrossRef]
- Pan, Y.; Zhu, K.; Xue, M.; Wang, X.; Hu, M.; Benjamin, S.G.; Whitaker, J.S. A GSI-based coupled EnSRF–En3DVar hybrid data assimilation system for the operational rapid refresh model: Tests at a reduced resolution. Mon. Weather Rev. 2014, 142, 3756–3780. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.S.; Parrish, D.F.; Rogers, E.; Lin, Y. Regional Ensemble–Variational Data Assimilation Using Global Ensemble Forecasts. Weather Forecast. 2017, 32, 83–96. [Google Scholar] [CrossRef]
- Rainwater, S.; Hunt, B. Mixed-resolution ensemble data assimilation. Mon. Weather Rev. 2013, 141, 3007–3021. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M.; Wei, X.; Song, Y.; Toth, Z. Ensemble data assimilation with the NCEP global forecast system. Mon. Weather Rev. 2008, 136, 463–482. [Google Scholar] [CrossRef] [Green Version]
- Kleist, D.T.; Parrish, D.F.; Derber, J.C.; Treadon, R.; Wu, W.S.; Lord, S. Introduction of the GSI into the NCEP global data assimilation system. Weather Forecast. 2009, 24, 1691–1705. [Google Scholar] [CrossRef] [Green Version]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical Note; Citeseer: Boulder, CO, USA, 2008. [Google Scholar]
- Barker, D.M.; Huang, W.; Guo, Y.R.; Bourgeois, A.J.; Xiao, Q.N. A three-dimensional variational data assimilation system for MM5: Implementation and initial results. Mon. Weather Rev. 2004, 132, 897–914. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, Z.; Yang, S.; Min, J.; Chen, L.; Chen, Y.; Zhang, T. Added value of assimilating Himawari-8 AHI water vapor radiances on analyses and forecasts for “7.19” severe storm over north China. J. Geophys Res.-Atmos. 2018, 123, 3374–3394. [Google Scholar] [CrossRef]
- Yang, C.; Liu, Z.; Gao, F.; Childs, P.P.; Min, J. Impact of assimilating GOES imager clear-sky radiance with a rapid refresh assimilation system for convection-permitting forecast over Mexico. J. Geophys. Res.-Atmos. 2017, 122, 5472–5490. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | 3DVar | GE-HDA | RE20-HDA | GE/RE20-HDA | RE60-HDA |
|---|---|---|---|---|---|
| cost | 1 min 16 s | 5 min 38 s | 32 min 49 s | 36 min 15 s | 103 min 28 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, Y.; Min, J. Efficient Regional Hybrid Ensemble-Variational Data Assimilation using the Global-Ensemble-Model-Augmented Error Covariance for Numerical Weather Prediction over Eastern China. Atmosphere 2020, 11, 365. https://doi.org/10.3390/atmos11040365
Wang Y, Chen Y, Min J. Efficient Regional Hybrid Ensemble-Variational Data Assimilation using the Global-Ensemble-Model-Augmented Error Covariance for Numerical Weather Prediction over Eastern China. Atmosphere. 2020; 11(4):365. https://doi.org/10.3390/atmos11040365
Chicago/Turabian StyleWang, Yuanbing, Yaodeng Chen, and Jinzhong Min. 2020. "Efficient Regional Hybrid Ensemble-Variational Data Assimilation using the Global-Ensemble-Model-Augmented Error Covariance for Numerical Weather Prediction over Eastern China" Atmosphere 11, no. 4: 365. https://doi.org/10.3390/atmos11040365