Evaluating the Impacts of Continuous and Rotational Grazing on Tallgrass Prairie Landscape Using High-Spatial-Resolution Imagery

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
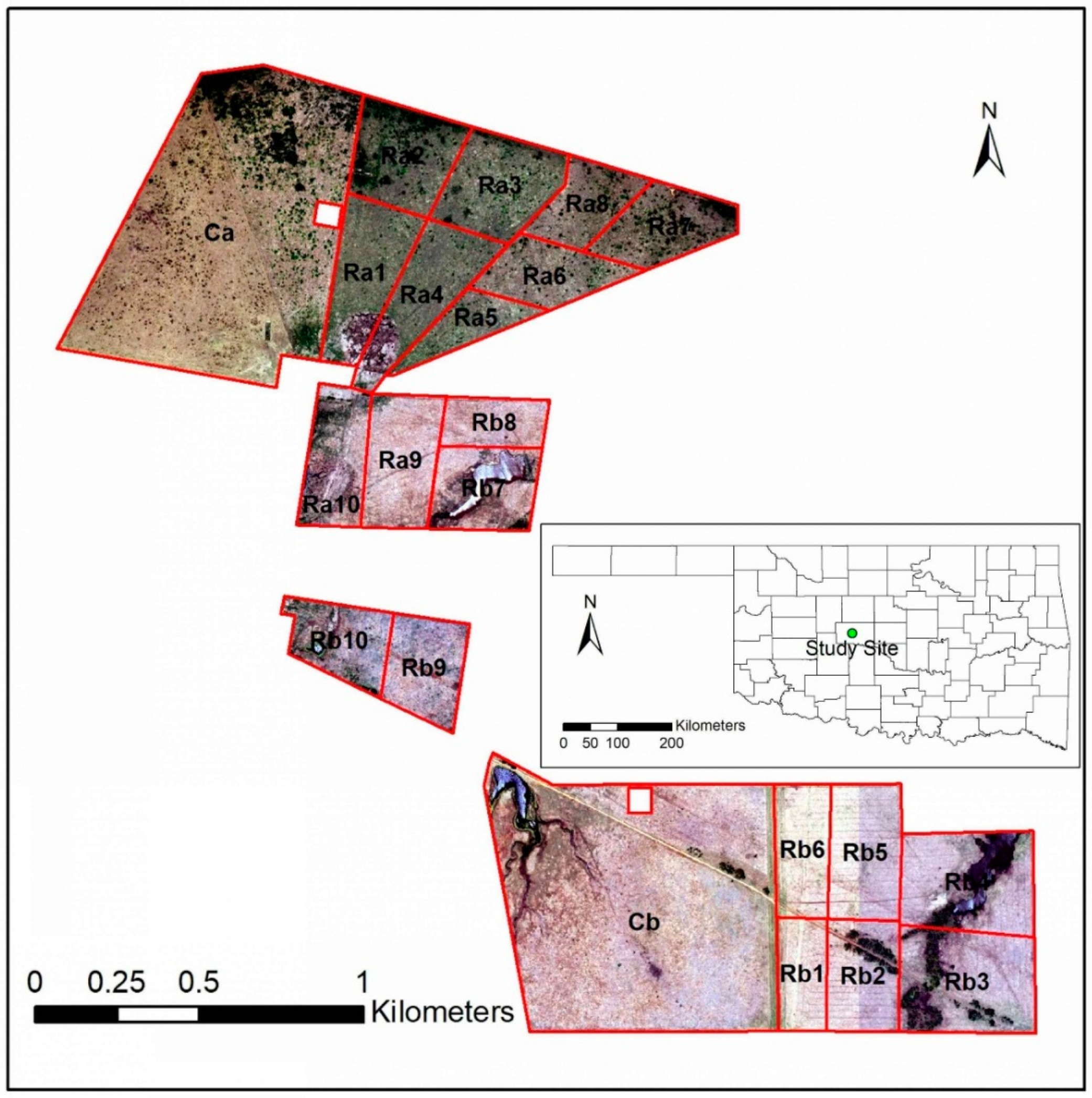
2.1. Study Area and Experiment Design
2.2. National Agriculture Imagery Program Imagery and the Normalized Difference Vegetation Index
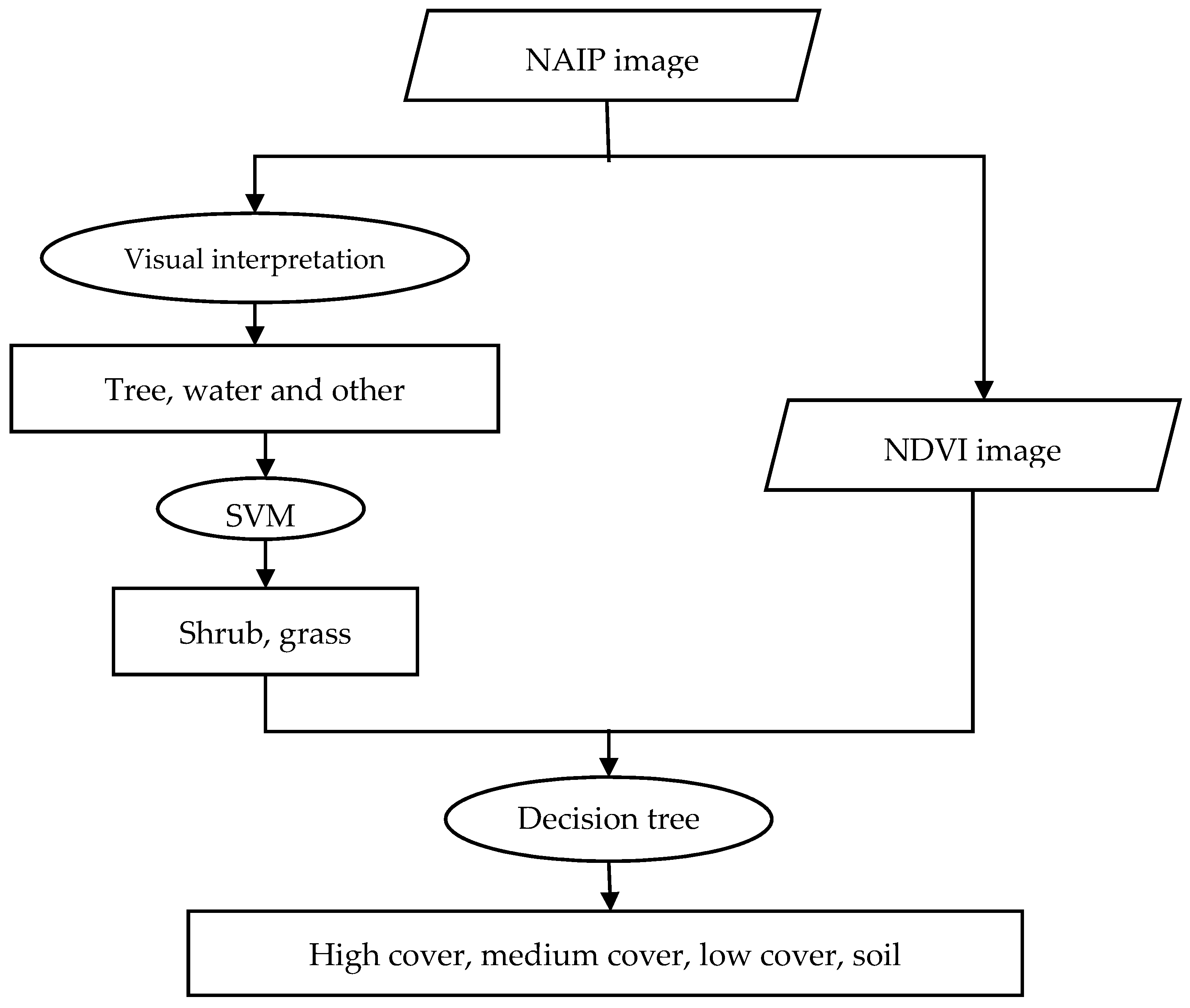
2.3. Image Classification
2.3.1. Visual Interpretation
2.3.2. Support Vector Machine
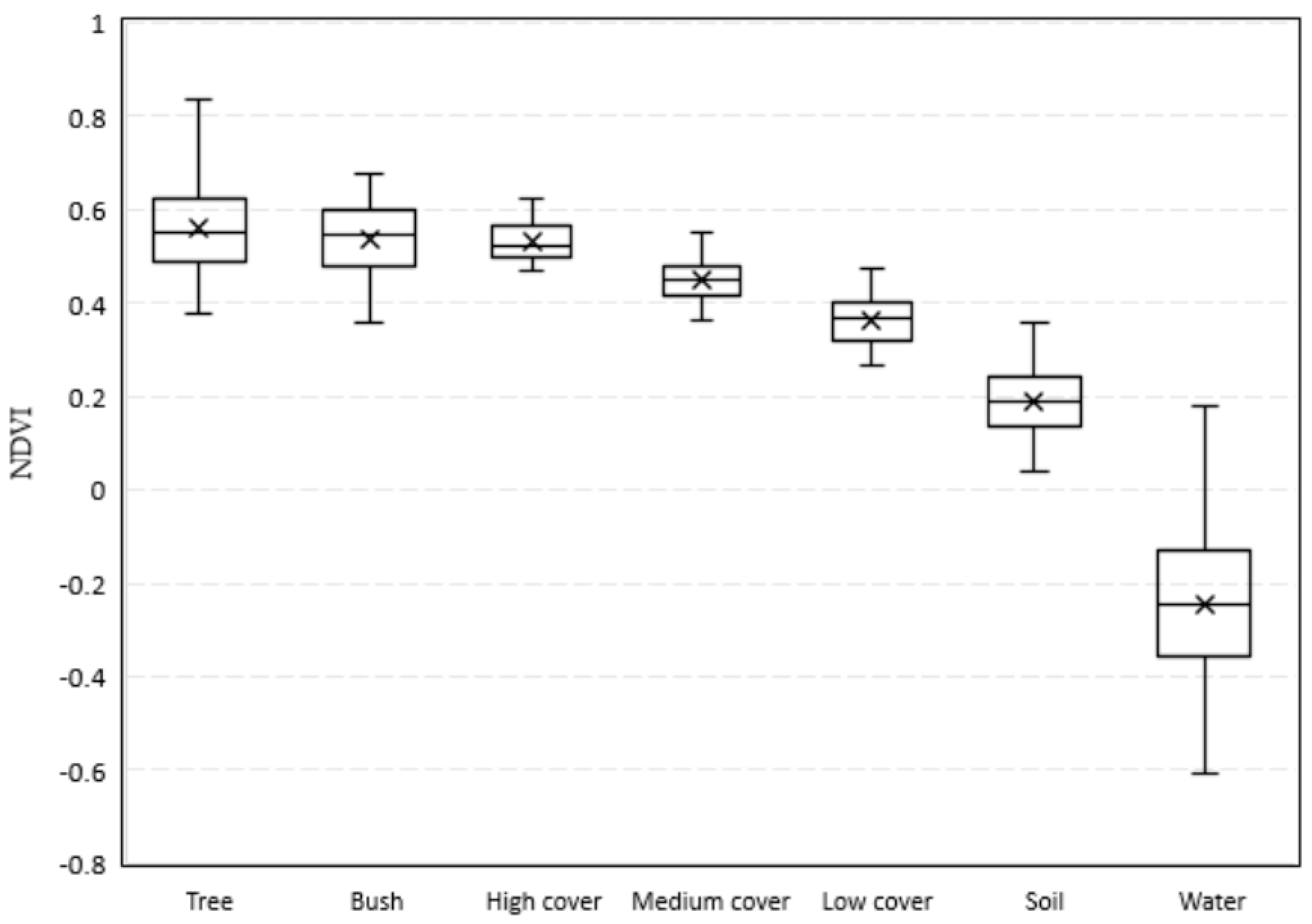
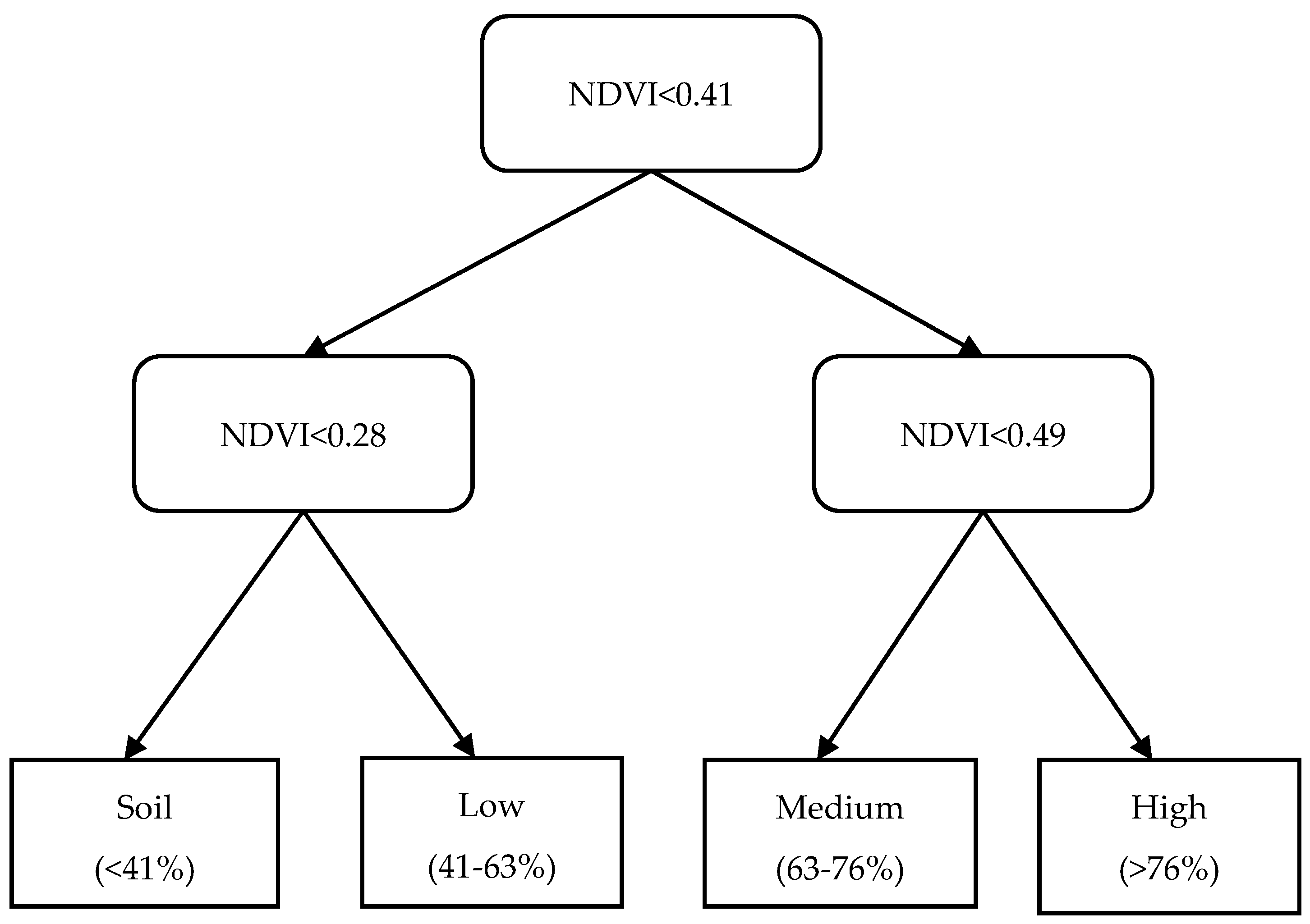
2.3.3. Decision Tree
2.4. Landscape Metrics and Statistical Analysis
3. Results
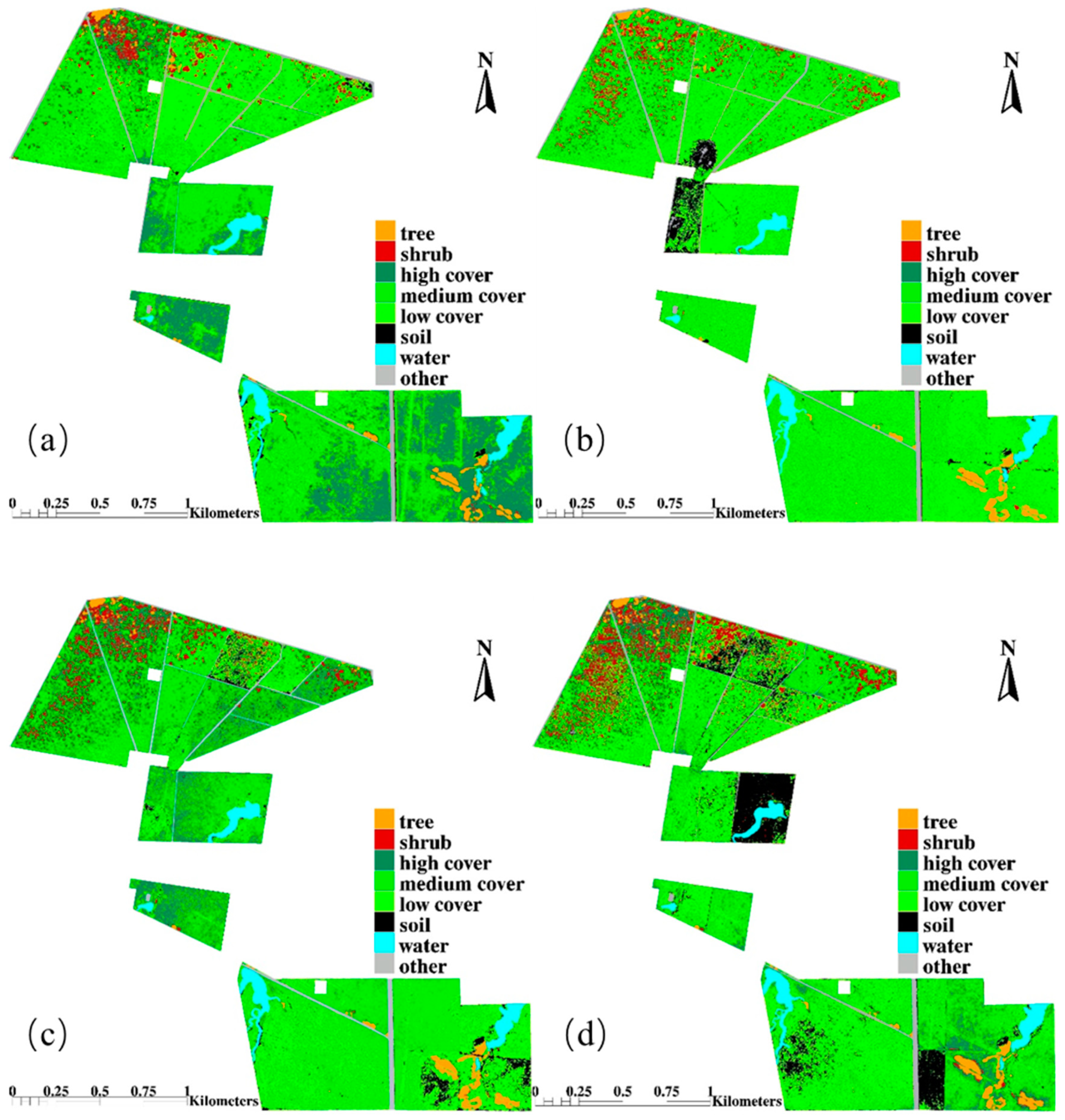
3.1. Land Cover Classification
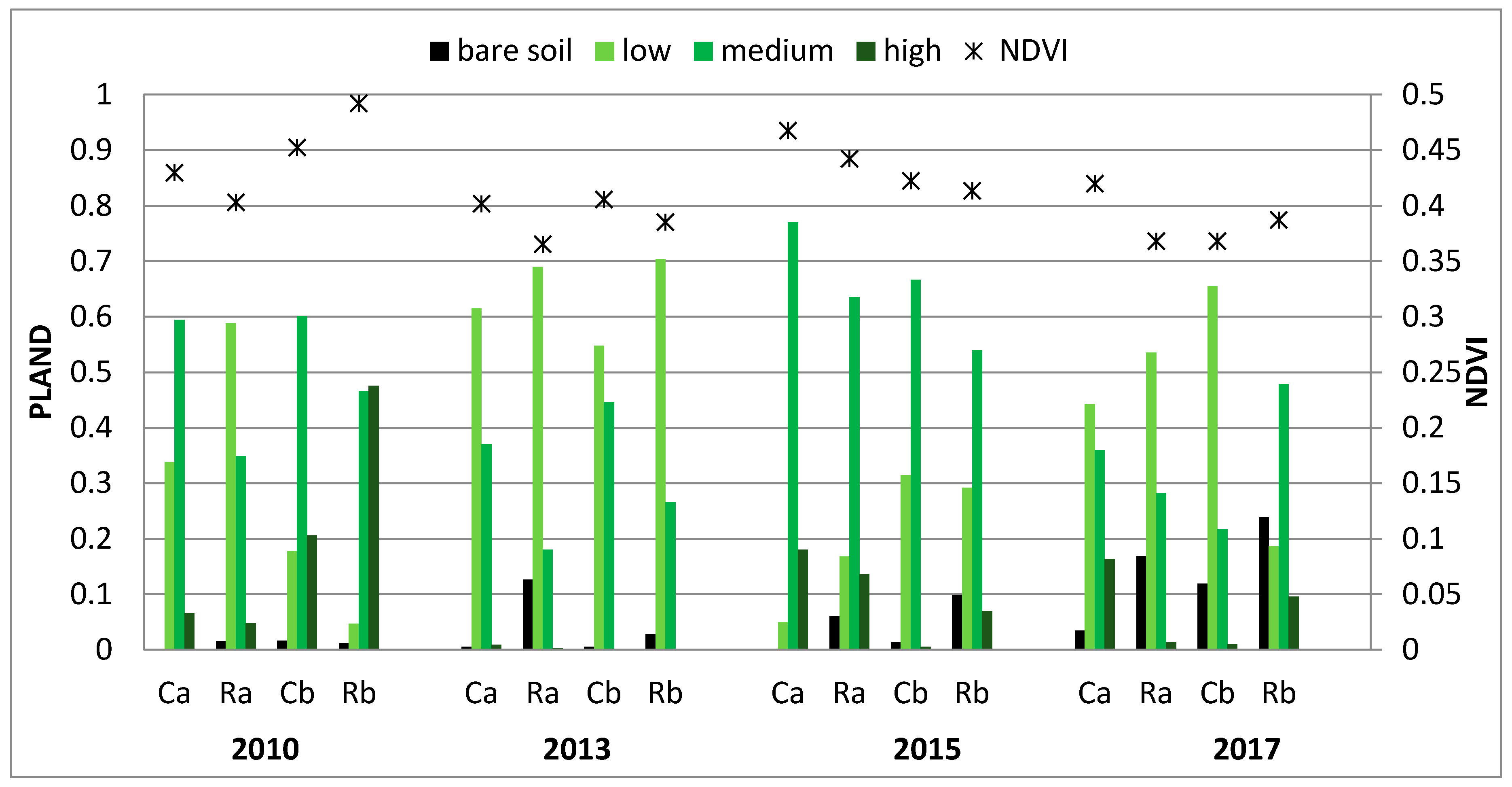
3.2. Grass Dynamics
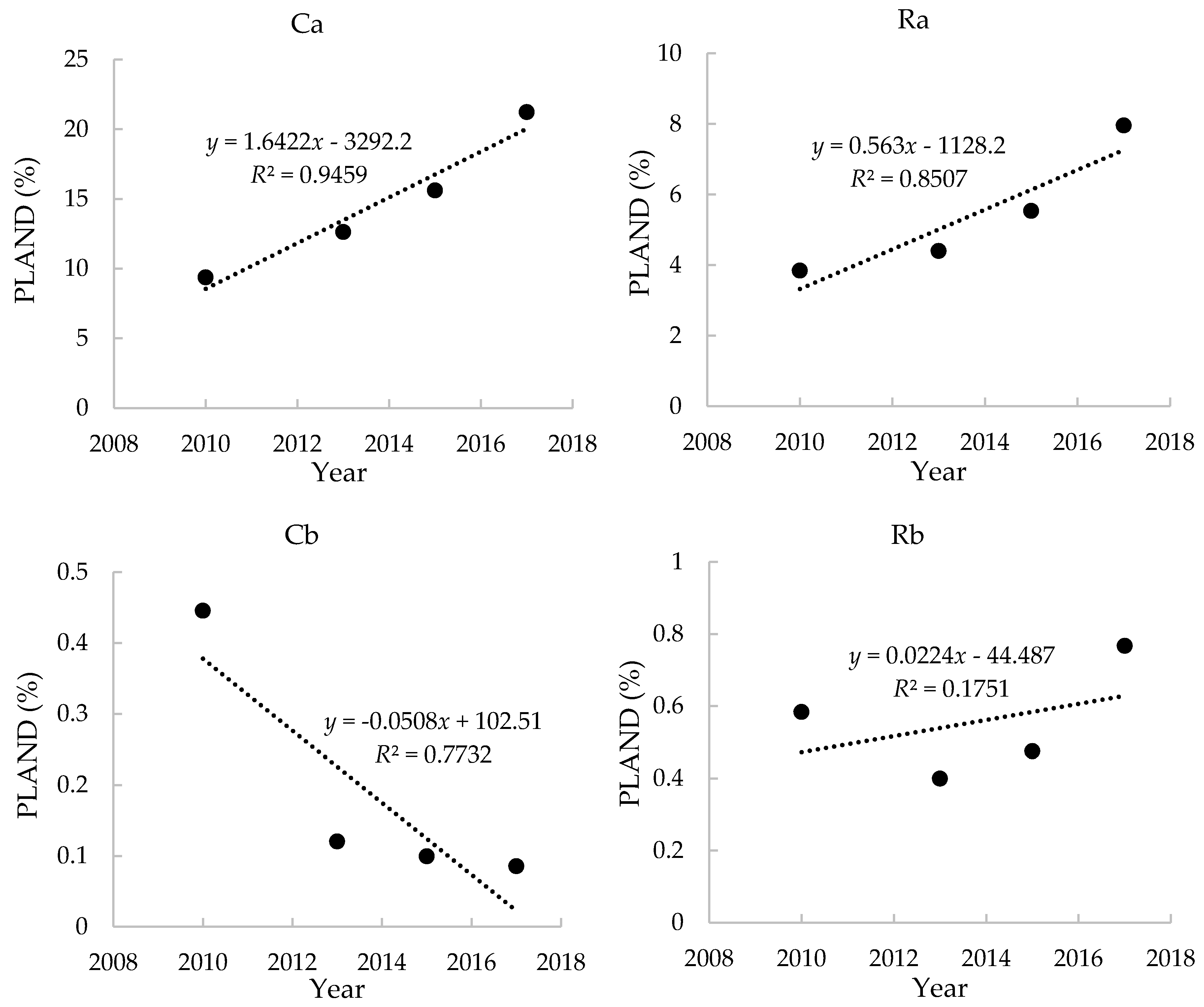
3.3. Shrub Encroachment
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Samson, F.B.; Knopf, F.L.; Ostlie, W.R. Great Plains ecosystems: past, present, and future. Wildl. Soc. 2004, 32, 6–15. [Google Scholar] [CrossRef] [Green Version]
- Cunfer, G. On the Great Plains: Agriculture and Environment; Texas A&M University Press: College Station, TX, USA, 2005. [Google Scholar]
- Fuhlendorf, S.D.; Engle, D.M. Restoring Heterogeneity on Rangelands: Ecosystem Management Based on Evolutionary Grazing Patterns: We propose a paradigm that enhances heterogeneity instead of homogeneity to promote biological diversity and wildlife habitat on rangelands grazed by livestock. BioScience 2001, 51, 625–632. [Google Scholar]
- Westoby, M.; Walker, B.; Noy-Meir, I. Opportunistic Management for Rangelands Not at Equilibrium. J. Range Manag. 1989, 42, 266. [Google Scholar] [CrossRef]
- Bidwell, T.; Elmore, D.; Hickman, K. Stocking Rate Determination on Native Rangeland. Available online: https://www.cattlemen.bc.ca/docs/factsheet_stocking_rate_determination.pdf (accessed on 25 March 2019).
- Hubbard, W.A. Rotational Grazing Studies in Western Canada. J. Range Manag. 1951, 4, 25. [Google Scholar] [CrossRef]
- Hyder, D.N.; Sawyer, W.A. Rotation-Deferred Grazing as Compared to Season-Long Grazing on Sagebrush-Bunchgrass Ranges in Oregon. J. Range Manag. 1951, 4, 30. [Google Scholar] [CrossRef]
- McIlvain, E.H.; Savage, D.A. Eight-Year Comparisons of Continuous and Rotational Grazing on the Southern Plains Experimental Range. J. Range Manag. 1951, 4, 42. [Google Scholar] [CrossRef]
- Rogler, G.A. A Twenty-Five Year Comparison of Continuous and Rotation Grazing in the Northern Plains. J. Range Manag. 1951, 4, 35. [Google Scholar] [CrossRef]
- Sampson, A.W. A Symposium on Rotation Grazing in North America. J. Range Manag. 1951, 4, 19. [Google Scholar] [CrossRef]
- Norton, B.E.; Barnes, M.; Teague, R. Grazing Management Can Improve Livestock Distribution. Rangelands 2013, 35, 45–51. [Google Scholar] [CrossRef]
- Eldridge, D.J.; Soliveres, S.; Bowker, M.A.; Val, J. Grazing dampens the positive effects of shrub encroachment on ecosystem functions in a semi-arid woodland. J. Appl. Ecol. 2013, 50, 1028–1038. [Google Scholar] [CrossRef] [Green Version]
- Heady, H.F. Continuous vs. Specialized Grazing Systems: A Review and Application to the California Annual Type. J. Range Manag. 1961, 14, 182. [Google Scholar] [CrossRef]
- Teague, W.; Dowhower, S.; Baker, S.; Haile, N.; Delaune, P.; Conover, D. Grazing management impacts on vegetation, soil biota and soil chemical, physical and hydrological properties in tall grass prairie. Agric. Ecosyst. 2011, 141, 310–322. [Google Scholar] [CrossRef]
- Teague, R.; Provenza, F.; Kreuter, U.; Steffens, T.; Barnes, M. Multi-paddock grazing on rangelands: Why the perceptual dichotomy between research results and rancher experience? J. Environ. Manag. 2013, 128, 699–717. [Google Scholar] [CrossRef] [PubMed]
- Bryant, F.C.; Dahl, B.E.; Pettit, R.D.; Britton, C.M. Does short-duration grazing work in arid and semiarid regions? J. Soil Water Conserv. 1989, 44, 290–296. [Google Scholar]
- Gillen, R.L.; Mccollum, F.T.; Tate, K.W.; Hodges, M.E. Tallgrass Prairie Response to Grazing System and Stocking Rate. J. Range Manag. 1998, 51, 139. [Google Scholar] [CrossRef]
- Briske, D.D.; Derner, J.D.; Brown, J.R.; Fuhlendorf, S.D.; Teague, W.R.; Havstad, K.M.; Gillen, R.L.; Ash, A.J.; Willms, W.D. Rotational Grazing on Rangelands: Reconciliation of Perception and Experimental Evidence. Rangel. Ecol. Manag. 2008, 61, 3–17. [Google Scholar] [CrossRef]
- Budd, B.; Thorpe, J. Benefits of Managed Grazing: A Manager’s Perspective. Rangelands 2009, 31, 11–14. [Google Scholar] [CrossRef]
- Briske, D.D.; Sayre, N.F.; Huntsinger, L.; Fernandez-Gimenez, M.; Budd, B.; Derner, J.D. Origin, Persistence, and Resolution of the Rotational Grazing Debate: Integrating Human Dimensions Into Rangeland Research. Rangel. Ecol. Manag. 2011, 64, 325–334. [Google Scholar] [CrossRef]
- Becker, W.; Kreuter, U.; Atkinson, S.; Teague, R. Whole-Ranch Unit Analysis of Multipaddock Grazing on Rangeland Sustainability in North Central Texas. Rangel. Ecol. Manag. 2017, 70, 448–455. [Google Scholar] [CrossRef]
- Danvir, R.; Simonds, G.; Sant, E.; Thacker, E.; Larsen, R.; Svejcar, T.; Ramsey, D.; Provenza, F.; Boyd, C. Upland Bare Ground and Riparian Vegetative Cover Under Strategic Grazing Management, Continuous Stocking, and Multiyear Rest in New Mexico Mid-grass Prairie. Rangelands 2018, 40, 1–8. [Google Scholar] [CrossRef]
- Sampson, A.W. Range Improvement by Deferred and Rotation Grazing; Bulletin of the U.S. Department of Agriculture No. 34: Washington, DC, USA, 1913. [Google Scholar]
- Leo, B.M. A Variation of Deferred Rotation Grazing for Use under Southwest Range Conditions. J. Range Manag. 1954, 7, 152–154. [Google Scholar]
- White, M.R.; Pieper, R.D.; Donart, G.B.; Trifaro, L.W. Vegetational Response to Short-Duration and Continuous Grazing in Southcentral New Mexico. J. Range Manag. 1991, 44, 399. [Google Scholar] [CrossRef]
- Jacobo, E.J.; Rodriguez, A.M.; Bartoloni, N.; Deregibus, V.A. Rotational Grazing Effects on Rangeland Vegetation at a Farm Scale. Rangelands 2006, 59, 249–257. [Google Scholar] [CrossRef]
- Wang, T.; Teague, W.R.; Park, S.C. Evaluation of Continuous and Multipaddock Grazing on Vegetation and Livestock Performance—a Modeling Approach. Rangel. Ecol. Manag. 2016, 69, 457–464. [Google Scholar] [CrossRef]
- Van Auken, O.W. SHRUB INVASIONS OF NORTH AMERICAN SEMIARID GRASSLANDS. Annu. Ecol. Syst. 2000, 31, 197–215. [Google Scholar] [CrossRef]
- Knapp, A.K.; Briggs, J.M.; Collins, S.L.; Archer, S.R.; Ewers, B.E.; Peters, D.P.; Young, D.R.; Shaver, G.R.; Pendall, E.; Cleary, M.B.; et al. Shrub encroachment in North American grasslands: shifts in growth form dominance rapidly alters control of ecosystem carbon inputs. Chang. Boil. 2008, 14, 615–623. [Google Scholar] [CrossRef]
- Angell, D.L.; McClaran, M.P. Long-term influences of livestock management and a non-native grass on grass dynamics in the Desert Grassland. J. Environ. 2001, 49, 507–520. [Google Scholar] [CrossRef]
- Batáry, P.; Orci, K.M.; Báldi, A.; Kleijn, D.; Kisbenedek, T.; Erdős, S. Effects of local and landscape scale and cattle grazing intensity on Orthoptera assemblages of the Hungarian Great Plain. Basic Appl. Ecol. 2007, 8, 280–290. [Google Scholar] [CrossRef]
- Schönbach, P.; Wan, H.; Gierus, M.; Bai, Y.F.; Müller, K.; Lin, L.J.; Susenbeth, A.; Taube, F. Grassland responses to grazing: Effects of grazing intensity and management system in an Inner Mongolian steppe ecosystem. Plant Soil 2011, 340, 103–115. [Google Scholar] [CrossRef]
- Baldi, A.; Batary, P.; Kleijn, D. Effects of grazing and biogeographic regions on grassland biodiversity in Hungary—Analysing assemblages of 1200 species. Agric. Ecosyst. 2013, 166, 28–34. [Google Scholar] [CrossRef]
- NAIP Imagery. Available online: https://www.fsa.usda.gov/programs-and-services/aerial-photography/imagery-programs/naip-imagery (accessed on 20 March 2018).
- U.S. Department of Agriculture, Natural Resources Conservation Service. National soil survey handbook, title 430-VI. Available online: http://www.nrcs.usda.gov/wps/portal/nrcs/detail/soils/ref/?cid=nrcs142p2_054242 (accessed on 20 March 2019).
- Steiner, J.L.S.; Neel, P.J.; Northup, B.K.; Gowda, P.H.; Brown, M.A.; Coleman, S. Managing, Tallgrass Prairies for Productivity and Ecological Function: A Long Term Grazing Experiment in the Southern Great Plains, USA. Agronomy 2019. In press. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote. Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef] [Green Version]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- DeFries, R.S.; Townshend, J.R.G. NDVI-derived land cover classifications at a global scale. Int. J. Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Carlson, T.N.; Ripley, D.A. On the relation between NDVI, fractional vegetation cover, and leaf area index. Remote. Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Geerken, R.; Zaitchik, B.; Evans, J.P. Classifying rangeland vegetation type and coverage from NDVI time series using Fourier Filtered Cycle Similarity. Int. J. Sens. 2005, 26, 5535–5554. [Google Scholar] [CrossRef] [Green Version]
- Gutman, G.; Ignatov, A. The derivation of the green vegetation fraction from NOAA/AVHRR data for use in numerical weather prediction models. Int. J. Sens. 1998, 19, 1533–1543. [Google Scholar] [CrossRef]
- Wagner, H.H.; Fortin, M.-J. Spatial Analysis of Landscapes: Concepts and Statistics. Ecology 2005, 86, 1975–1987. [Google Scholar] [CrossRef]
- McGarigal, K. Landscape Pattern Metrics. Available online: https://www.umass.edu/landeco/pubs/mcgarigal.2002.pdf (accessed on 12 October 2018).
- Fichera, C.R. Land Cover classification and change-detection analysis using multi-temporal remote sensed imagery and landscape metrics. Eur. J. Sens. 2012, 45, 1–18. [Google Scholar] [CrossRef] [Green Version]
- McGarigal, K.; Marks, B.J. Fragstats: Spatial Pattern Analysis Program for Quantifying Landscape Structure; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Corvallis, OR, USA, 1995; Volume 351, p. 122.
- Zhou, Y.; Gowda, P.H.; Wagle, P.; Ma, S.; Neel, J.P.S.; Kakani, V.G.; Steiner, J.L. Climate Effects on Tallgrass Prairie Responses to Continuous and Rotational Grazing. Agronomy 2019, 9, 219. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifier | Overall Accuracy(%) | Kappa Coefficient |
|---|---|---|
| SVM | 93.58 | 0.87 |
| ANN | 92.6 | 0.85 |
| ML | 87.15 | 0.75 |
| Landscape index | Description | Formula |
|---|---|---|
| TA | Area of total landscape | |
| CA | Area of class I | |
| NP | Number of patches in class I | |
| PLAND | Proportion of the landscape occupied by patch type (class) I | |
| FN | The degree of fragmentation of the class I |
| t | df | p | Mean of the differences | |
|---|---|---|---|---|
| Bare soil | −2.95 | 3 | 0.06 | −0.08 |
| Low grass cover | −3.38 | 3 | 0.04 | −0.13 |
| Medium grass cover | 4.45 | 3 | 0.02 | 0.16 |
| High grass cover | 1.66 | 3 | 0.20 | 0.05 |
| t | df | p | Mean of the differences | |
|---|---|---|---|---|
| Bare soil | −1.95 | 3 | 0.15 | −0.06 |
| Low grass cover | 0.89 | 3 | 0.44 | 0.12 |
| Medium grass cover | 0.43 | 3 | 0.69 | 0.04 |
| High grass cover | −1.83 | 3 | 0.17 | −0.11 |
| ID | Year | TA (ha) | CA (ha) | PLAND (%) | NP | Patch Fragmentation |
|---|---|---|---|---|---|---|
| Ca | 2010 | 5.49 | 9.37 | 1727 | 314.68 | |
| 2013 | 58.6 | 7.40 | 12.62 | 2054 | 277.69 | |
| 2015 | 9.15 | 15.61 | 2230 | 243.76 | ||
| 2017 | 12.44 | 21.23 | 3034 | 243.87 | ||
| Ra | 2010 | 3.02 | 3.85 | 762 | 252.03 | |
| 2013 | 78.6 | 3.46 | 4.40 | 1266 | 365.79 | |
| 2015 | 4.35 | 5.54 | 1353 | 310.88 | ||
| 2017 | 6.26 | 7.96 | 1438 | 229.88 | ||
| Cb | 2010 | 0.28 | 0.45 | 238 | 851.83 | |
| 2013 | 62.7 | 0.08 | 0.12 | 129 | 1710.88 | |
| 2015 | 0.06 | 0.10 | 93 | 1492.78 | ||
| 2017 | 0.05 | 0.09 | 90 | 1679.10 | ||
| Rb | 2010 | 0.48 | 0.58 | 477 | 988.19 | |
| 2013 | 82.7 | 0.33 | 0.40 | 419 | 1268.54 | |
| 2015 | 0.39 | 0.47 | 331 | 842.88 | ||
| 2017 | 0.63 | 0.77 | 346 | 545.40 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Zhou, Y.; Gowda, P.H.; Chen, L.; Starks, P.J.; Steiner, J.L.; Neel, J.P.S. Evaluating the Impacts of Continuous and Rotational Grazing on Tallgrass Prairie Landscape Using High-Spatial-Resolution Imagery. Agronomy 2019, 9, 238. https://doi.org/10.3390/agronomy9050238
Ma S, Zhou Y, Gowda PH, Chen L, Starks PJ, Steiner JL, Neel JPS. Evaluating the Impacts of Continuous and Rotational Grazing on Tallgrass Prairie Landscape Using High-Spatial-Resolution Imagery. Agronomy. 2019; 9(5):238. https://doi.org/10.3390/agronomy9050238
Chicago/Turabian StyleMa, Shengfang, Yuting Zhou, Prasanna H. Gowda, Liangfu Chen, Patrick J. Starks, Jean L. Steiner, and James P. S. Neel. 2019. "Evaluating the Impacts of Continuous and Rotational Grazing on Tallgrass Prairie Landscape Using High-Spatial-Resolution Imagery" Agronomy 9, no. 5: 238. https://doi.org/10.3390/agronomy9050238