
Method and Experiment for Quantifying Local Features of Hard Bottom Contours When Driving Intelligent Farm Machinery in Paddy Fields

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hard Bottom Contour Sensing Platform
2.2. The Method Used to Process the Collected Data
2.2.1. Automatic Calibration of Sensor Mounting Errors
- (1)
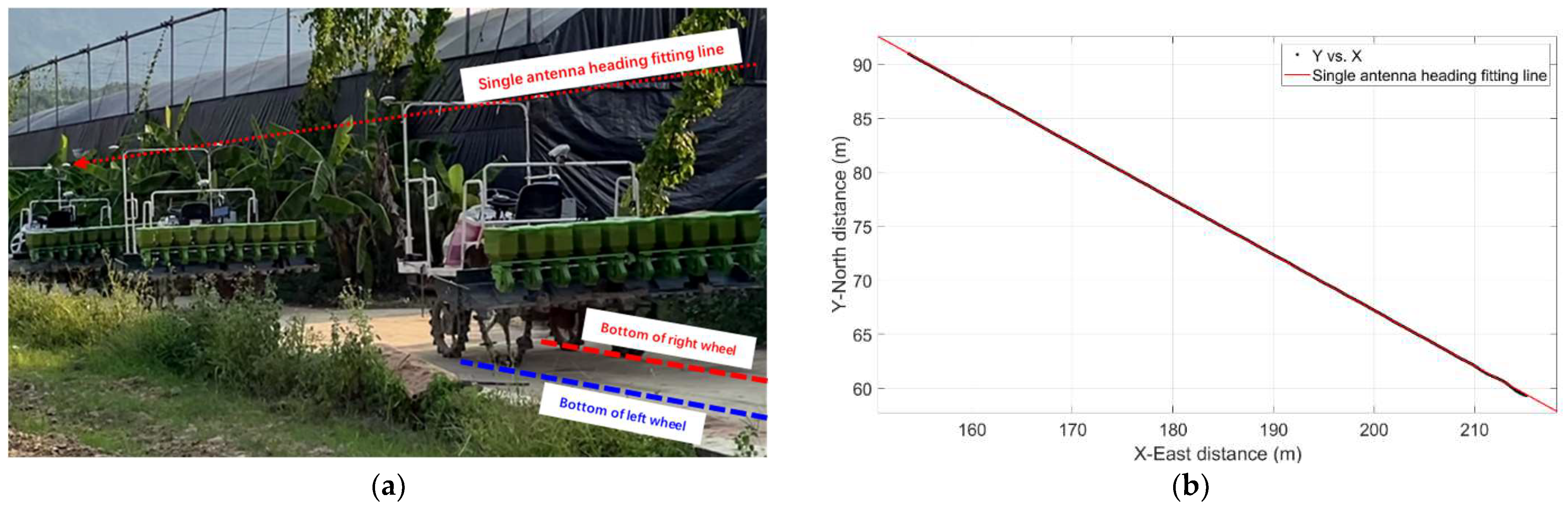
- Automatic calibration of the heading angle
- (2)
- Automatic calibration of the roll angle and pitch angle
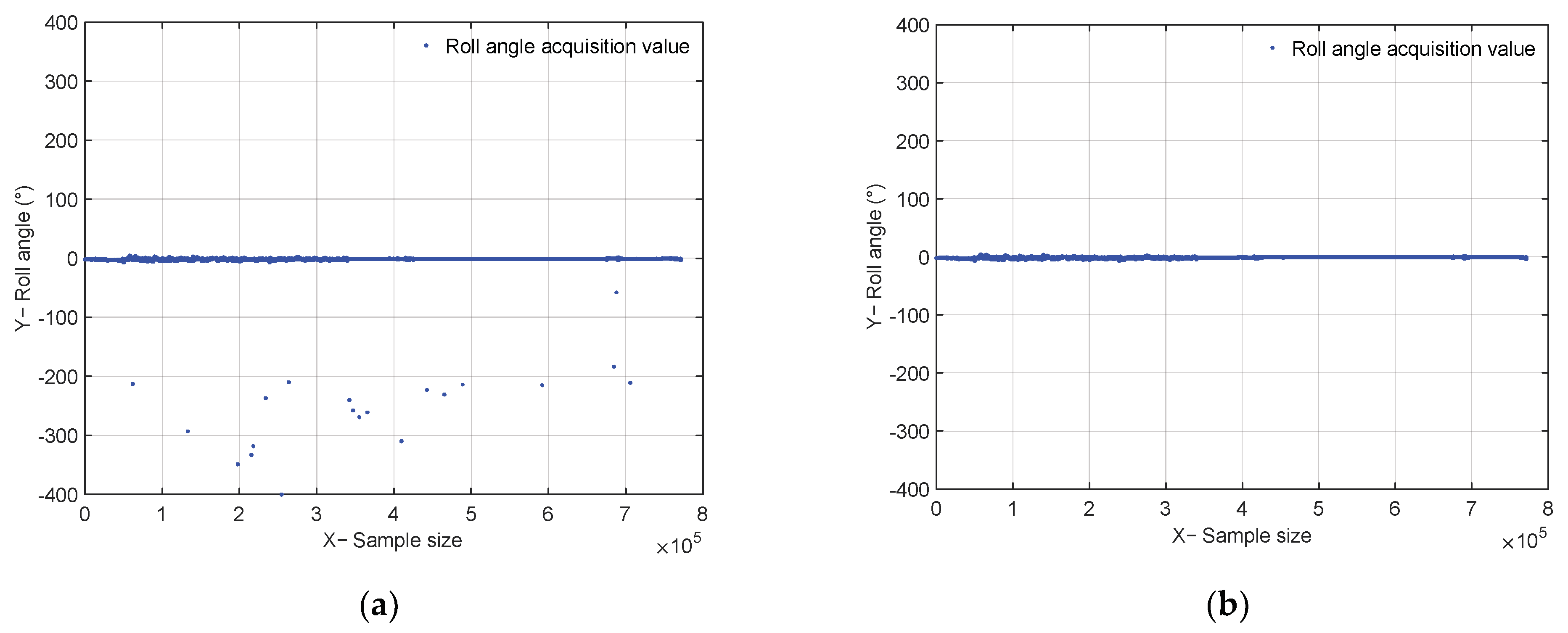
2.2.2. Outlier Rejection
2.2.3. Contour Trajectory 3D Spline Curve Denoising
2.3. Hard Bottom Layer Surface Roughness Estimation Method
3. Results
3.1. Test Scenario
3.2. Quantitative Estimation of Hard Bottom Profile Roughness Characteristics for Whole Fields
3.3. Representative Hard Bottom Contour Surface Characterization
4. Discussion
5. Conclusions
- (1)
- The design of data processing methods for the automatic calibration of the sensor installation error, outlier rejection, and 3D spline curve denoising of contour trajectory. The real heading angle is obtained using the trajectory of the main positioning antenna of the intelligent farm machine in a straight line and fitting it to a straight line, and the difference is calculated and compensated for by comparing it with the installed dual-antenna directional acquisition heading angle to realize the heading calibration. The system error in the round-trip roll angle and pitch angle is obtained using the round-trip straight-line driving of the intelligent farm machine following the same path, and the calibration of the roll and pitch angle is realized. The raw data from the sensor measurements are processed using the Lajda criterion and the wavelet denoising method, and the rejection of the hard bottom contour ghost points and intersection points is realized with the intelligent farm machine’s data collection.
- (2)
- A quantification method for the local features of the hard bottom layer was established. Based on the field operation of unmanned live broadcasters and the simultaneous collection of hard bottom layer information, the local feature quantification of the hard bottom layer of paddy fields with correlated location information was achieved by calculating local sliding surface roughness to evaluate the degree of the hard bottom layer’s surface bumps. The quantified local characteristics of the hard bottom layer in the test plots showed that the mean value of local roughness was 0.0065, where 68.27% was distributed in the interval of [0.0042, 0.0087] and 99.73% was distributed in the interval of [0, 0.0133].
- (3)
- The variability in the surface roughness of the representative driving sections was analyzed. The hard bottom surface profile feature evaluation method based on local sliding surface roughness was used to analyze the hard bottom surface roughness features of the representative driving routes such as transport, down-field, operation, and trapping of the unmanned intelligent agricultural machine. It was used to compare the representative driving section profile’s feature variability based on the local surface roughness and proved the feasibility of the quantification method for the local features of the hard bottom layer.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nawaz, A.; Rehman, A.U.; Rehman, A.; Ahmad, S.; Siddique, K.H.M.; Farooq, M. Increasing sustainability for rice production systems. J. Cereal Sci. 2022, 103, 103400. [Google Scholar] [CrossRef]
- Kuenzer, C.; Knauer, K. Remote sensing of rice crop areas. Int. J. Remote Sens. 2013, 34, 2101–2139. [Google Scholar] [CrossRef]
- Xin, F.; Xiao, X.; Dong, J.; Zhang, G.; Zhang, Y.; Wu, X.; Li, X.; Zou, Z.; Ma, J.; Du, G.; et al. Large increases of paddy rice area, gross primary production, and grain production in Northeast China during 2000–2017. Sci. Total Environ. 2020, 711, 135183. [Google Scholar] [CrossRef]
- Zhao, Y. Statistical analysis of the changes of cultivated land resources in the past 10 years. Territ. Nat. Resour. Study 2020, 1, 53–57. [Google Scholar] [CrossRef]
- Liu, C.; Lin, H.; Li, Y.; Gong, L.; Miao, Z. Analysis on status and development trend of intelligent control technology for agricultural equipment. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar] [CrossRef]
- Chen, X.; Wen, H.; Zhang, W.; Pan, F.; Zhao, Y. Advances and progress of agricultural machinery and sensing technology fusion. Smart Agric. 2020, 2, 1–16. [Google Scholar] [CrossRef]
- Luo, X.; Liao, J.; Zang, Y.; Ou, Y.; Wang, P. Developing from Mechanized to Smart Agricultural Production in China. Strateg. Study Chin. Acad. Eng. 2022, 24, 46–54. [Google Scholar] [CrossRef]
- Luo, X.; Liao, J.; Hu, L.; Zhou, Z.; Zhang, Z.; Zang, Y.; Wang, P.; He, J. Research progress of intelligent agricultural machinery and practice of unmanned farm in China. J. South China Agric. Univ. 2021, 42, 8–17. [Google Scholar] [CrossRef]
- He, J.; Hu, L.; Wang, P.; Liu, Y.; Man, Z.; Tu, T.; Yang, L.; Li, Y.; Yi, Y.; Li, W.; et al. Path tracking control method and performance test based on agricultural machinery pose correction. Comput. Electron. Agric. 2022, 200, 107185. [Google Scholar] [CrossRef]
- Hu, L.; Luo, X.; Lin, C.; Yang, W.; Xu, Y.; Li, Q. Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2014, 45, 146–151. [Google Scholar]
- Li, H.; Niu, D.; Wang, Y.; Li, X.; Meng, Q.; Liu, G. Rapid survey technology of farmland terrain based on RTK-GNSS. J. China Agric. Univ. 2014, 19, 188–194. [Google Scholar] [CrossRef]
- Hu, L.; Yang, W.; Xu, Y.; Zhou, H.; Luo, X.; Ke, X.; Zi, S. Design and experiment of paddy field leveler based on GPS. J. South China Agric. Univ. 2015, 36, 130–134. [Google Scholar] [CrossRef]
- Liu, G.; Li, X.; Kang, X.; Xia, Y.; Niu, D. Automatic Navigation Path Planning Method for Land Leveling Based on GNSS. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2016, 47, 21–28. [Google Scholar] [CrossRef]
- Xia, Y.; Liu, G.; Kang, X.; Jing, Y. Optimization and Analysis of Location Accuracy Based on GNSS-controlled Precise Land Leveling System. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2017, 48, 40–44. [Google Scholar] [CrossRef]
- Rovira-Más, F.; Zhang, Q.; Reid, J.F. Stereo vision three-dimensional terrain maps for precision agriculture. Comput. Electron. Agric. 2008, 60, 133–143. [Google Scholar] [CrossRef]
- Marinello, F.; Pezzuolo, A.; Gasparini, F.; Arvidsson, J.; Sartori, L. Application of the Kinect sensor for dynamic soil surface characterization. Precis. Agric. 2015, 16, 601–612. [Google Scholar] [CrossRef]
- Yandun Narváez, F.; Gregorio, E.; Escolà, A.; Rosell-Polo, J.R.; Torres-Torriti, M.; Auat Cheein, F. Terrain classification using ToF sensors for the enhancement of agricultural machinery traversability. J. Terramechanics 2018, 76, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Chen, Y.; Jia, W.; Wang, M. Design of three dimensional topographic information measuring system. J. Jilin Univ. (Eng. Technol. Ed.) 2007, 37, 1451–1454. [Google Scholar] [CrossRef]
- Starek, M.J.; Chu, T.; Mitasova, H.; Harmon, R.S. Viewshed simulation and optimization for digital terrain modelling with terrestrial laser scanning. Int. J. Remote Sens. 2020, 41, 6409–6426. [Google Scholar] [CrossRef]
- Tu, T.; He, J.; Luo, X.; Hu, L.; Wang, P.; Chen, G.; Tian, L.; Feng, D.; Wang, Z.; Man, Z.; et al. Methods and experiments for collecting information and constructing models of bottom-layer contours in paddy fields. Comput. Electron. Agric. 2023, 207, 107719. [Google Scholar] [CrossRef]
- Flintsch, G.W.; Valeri, S.M.; Katicha, S.W.; de Leon Izeppi, E.D.; Medina-Flintsch, A. Probe vehicles used to measure road ride quality: Pilot demonstration. Transp. Res. Rec. 2012, 2304, 158–165. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, G.; Yang, Y.; Liu, J.; Sun, L. Road surface equivalent reconstruction based on measured road spectrum. Trans. Chin. Soc. Agric. Eng. 2012, 28, 26–32. [Google Scholar] [CrossRef]
- Choi, M.; Kim, M.; Kim, G.; Kim, S.; Park, S.; Lee, S. 3D scanning technique for obtaining road surface and its applications. Int. J. Precis. Eng. Manuf. 2017, 18, 367–373. [Google Scholar] [CrossRef]
- Hou, Z.; Lu, Z.; Zhao, L. Fractal behavior of tillage soil surface roughness. Trans. Chin. Soc. Agric. Mach. 2007, 38, 50–53. [Google Scholar]
- Lu, Z.; Zhao, L.; Hou, Z. Fractal behavior of road profile roughness. J. Jiangsu Univ. (Nat. Sci. Ed.) 2008, 29, 111–114. [Google Scholar]
- Wang, L.; Yan, J.; Hou, Z.; Zhang, Y. Design and experiment on agricultural field profiling apparatus. J. Shenyang Agric. Univ. 2018, 49, 425–432. [Google Scholar] [CrossRef]
- Zhu, S.; Ma, J.; Yuan, J.; Xu, G.; Zhou, Y.; Deng, X. Vibration characteristics of tractor in condition of paddy operation. Trans. Chin. Soc. Agric. Eng. 2016, 32, 31–38. [Google Scholar] [CrossRef]
- Zhao, R.; Hu, L.; Luo, X.; Zhou, H.; Du, P.; Tang, L.; He, J.; Mao, T. A novel approach for describing and classifying the unevenness of the bottom layer of paddy fields. Comput. Electron. Agric. 2019, 162, 552–560. [Google Scholar] [CrossRef]
- Balduzzi, M.A.; Van der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Coppin, P. The properties of terrestrial laser system intensity for measuring leaf geometries: A case study with conference pear trees (Pyrus Communis). Sensors 2011, 11, 1657–1681. [Google Scholar] [CrossRef]
- Sardy, S.; Tseng, P.; Bruce, A. Robust wavelet denoising. IEEE Transactions on Signal Processing. 2001, 49, 1146–1152. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Wu, T.; Xiao, Y.; Gong, L.; Liu, C. Path planning in continuous adjacent farmlands and robust path-tracking control of a rice-seeding robot in paddy field. Comput. Electron. Agric. 2023, 210, 107900. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Size | R-Square | RMSE | SSE | Adj R-sq |
|---|---|---|---|---|
| 16,135 | 1 | 0.0099 | 1.5761 | 1 |
| Roll Angle/° | Pitch Angle/° | |
|---|---|---|
| Average value (driving in the positive direction) | 0.197435 | −3.11529 |
| Average value (driving in the negative direction) | −0.27745 | −1.0474 |
| Sensor mounting error | 0.04001 | 2.08134 |
| No. | ① | ② | ③ | ④ | ⑤ | ⑥ |
|---|---|---|---|---|---|---|
| Starting point number | 5056 | 7893 | 10,000 | 12,126 | 14,782 | 15,280 |
| Termination point number | 6496 | 9329 | 11,557 | 12,268 | 15,229 | 16,001 |
| Rd | 0.0037 | 0.0011 | 0.0023 | 0.0095 | 0.0070 | 0.0125 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, T.; Hu, L.; Luo, X.; He, J.; Wang, P.; Tian, L.; Chen, G.; Man, Z.; Feng, D.; Cen, W.; et al. Method and Experiment for Quantifying Local Features of Hard Bottom Contours When Driving Intelligent Farm Machinery in Paddy Fields. Agronomy 2023, 13, 1949. https://doi.org/10.3390/agronomy13071949
Tu T, Hu L, Luo X, He J, Wang P, Tian L, Chen G, Man Z, Feng D, Cen W, et al. Method and Experiment for Quantifying Local Features of Hard Bottom Contours When Driving Intelligent Farm Machinery in Paddy Fields. Agronomy. 2023; 13(7):1949. https://doi.org/10.3390/agronomy13071949
Chicago/Turabian StyleTu, Tuanpeng, Lian Hu, Xiwen Luo, Jie He, Pei Wang, Li Tian, Gaolong Chen, Zhongxian Man, Dawen Feng, Weirui Cen, and et al. 2023. "Method and Experiment for Quantifying Local Features of Hard Bottom Contours When Driving Intelligent Farm Machinery in Paddy Fields" Agronomy 13, no. 7: 1949. https://doi.org/10.3390/agronomy13071949