
Design of a Tomato Sorting Device Based on the Multisine-FSR Composite Measurement


 ,
, 
Abstract
:1. Introduction
- (1)
- Manual sorting: This method is time-consuming and labor-intensive. In recent years, with the acceleration of urbanization and the gradual shortage and aging of agricultural labor, manual picking and sorting methods have made labor costs increasingly high and unable to meet market demands [2,5,6,7,8].
- (2)
- Visual recognition method [9]: This method sorts the phenotypic physical characteristics of tomatoes based on their size and color and cannot detect the internal substance content of tomatoes. Gao et al. [6] improved the recognition and detection methods of YOLOv5 by using k-means clustering (KMC) at the input end to obtain more suitable anchor points, improving spatial pyramid pooling (SPP) to enhance multi-scale feature extraction, and optimizing non-maximum suppression (NMS) to improve network accuracy. The improved YOLOv5 has much better recognition accuracy and speed than the region-based convolutional neural network and YOLOv3. The improved network has good robustness and provides stable and reliable information for the operation of tomato picking robots. Guan et al. [4] considered variable conditions such as light changes and interference from branches and leaves and used YOLOv5 to confirm the positional relationship between tomatoes and flower stems. Based on the growth characteristics of the fruit, particular areas for picking flower stems were reduced. The center of the boundary box of the flower stems was used as the picking point to obtain corresponding depth information, and the robot was controlled to complete the picking task. This method can identify and locate tomato picking points in complex near-color backgrounds. Compared with the SSD algorithm, it has obvious advantages; Mayar et al. [10] achieved a theoretical classification performance of 100% for all categories of tomatoes based on the control algorithm of CNN-ANN. The actual experimental results showed a theoretical classification performance of 100% for immature and mature tomatoes, and a theoretical classification performance of 90% for mature and defective (overripe and rotten) tomatoes.
- (3)
- Electrical impedance detection method: At present, the technology of biological quality analysis based on electrical impedance is relatively mature [11]. Arteaga and other scholars [12] evaluate the color and cell size through the calculation algorithm with biological electrical impedance, providing a powerful tool for assessing the cell damage of blueberries during freezing. Chowdhury et al. [13] studied all impedance parameters Z, phase angle, the real part of Z, and imaginary part of Z of bananas, and analyzed the ripening phenomenon of bananas from the perspective of impedance. Li et al. [14] used leaf impedance spectroscopy to evaluate tomato nitrogen nutrition levels, achieving early diagnosis and monitoring of tomato nitrogen content. Electrical impedance can be conveniently applied to early diagnosis and monitoring of tomato nitrogen nutrition stress.
2. Materials and Methods
2.1. Study Area and Experimental Setup
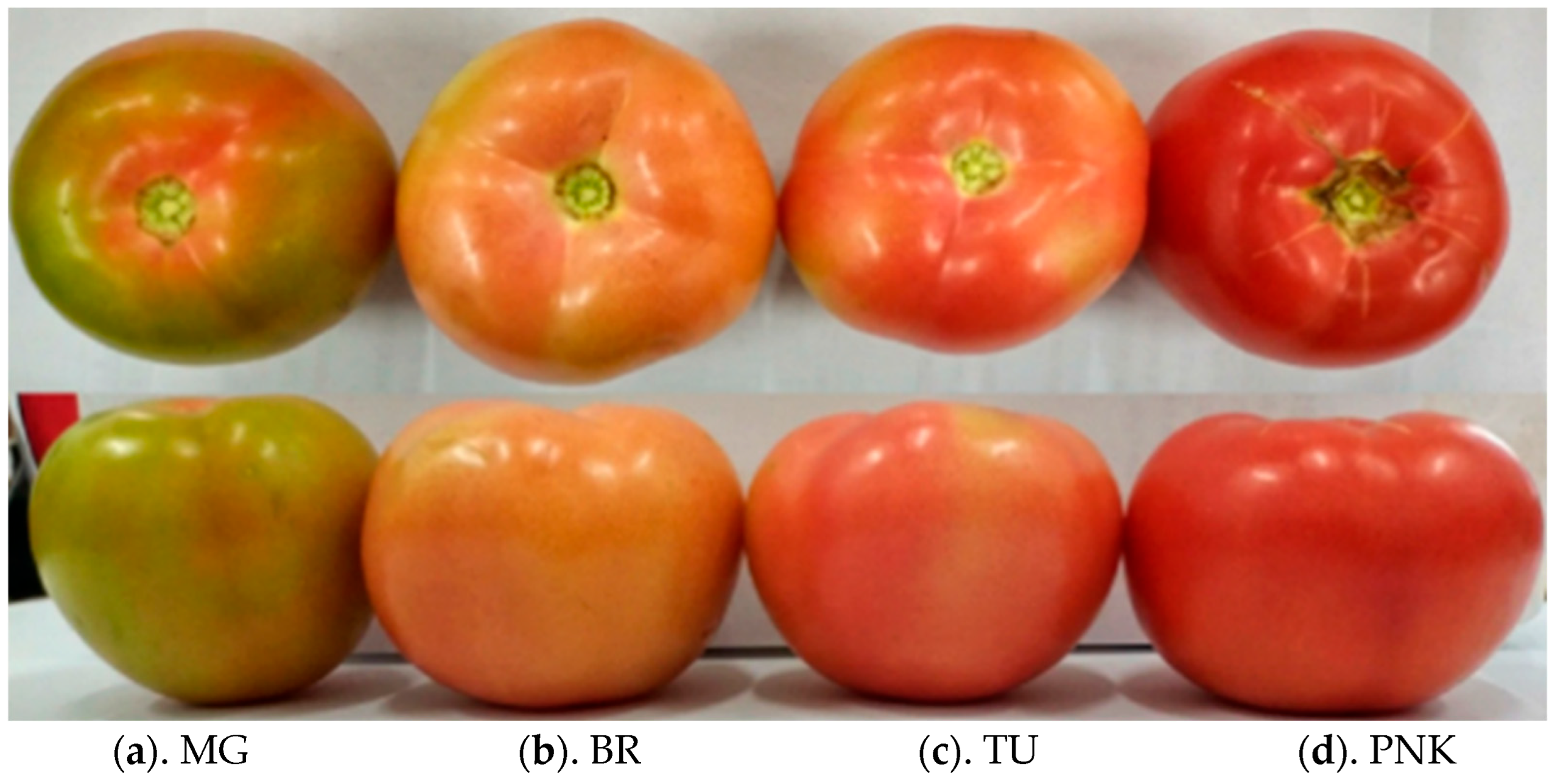
2.2. Tomato Skin Color
2.3. Measurements of Electrical Impedance
2.4. Theoretical Basis of Multi-Frequency Measurement
2.5. FSR Hybrid Measurement
2.5.1. Electrical Impedance Analysis
2.5.2. Force Compensation Analysis
- Measurement unit: N, kgf (gf) or lbf
- Display: Four-digit LCD
- Measurable value: peak or random value
- Sampling rate: 1000 times/s
- Overload capacity: approximately 120% F.S (LCD flashing alarm at 100% F.S)
- A/D converter: 24-bit
- Processor: 16-bit mcu
- Accuracy: 0.1% F.S
- Operating temperature: −20 to 40 °C
3. Results and Discussion
3.1. Electrical Impedance Detection Test
3.2. Force Detection Test
3.3. Maturity Detection Test
3.4. Comparative Experiment on Picking Efficiency
4. Summary and Future Work
4.1. Summary
- (1)
- In this article, FSR with a removed insulation film was used mainly as the electrode while also retaining the function of force detection. Through experiments, it was evident that tomatoes of the same size and visual maturity had almost the same reference complex impedance frequency curve, which provided a strong theoretical basis for electrical impedance sorting. Combined with a force-detection-based end effector for picking, integration of picking and sorting was achieved, greatly improving the efficiency of tomato production.
- (2)
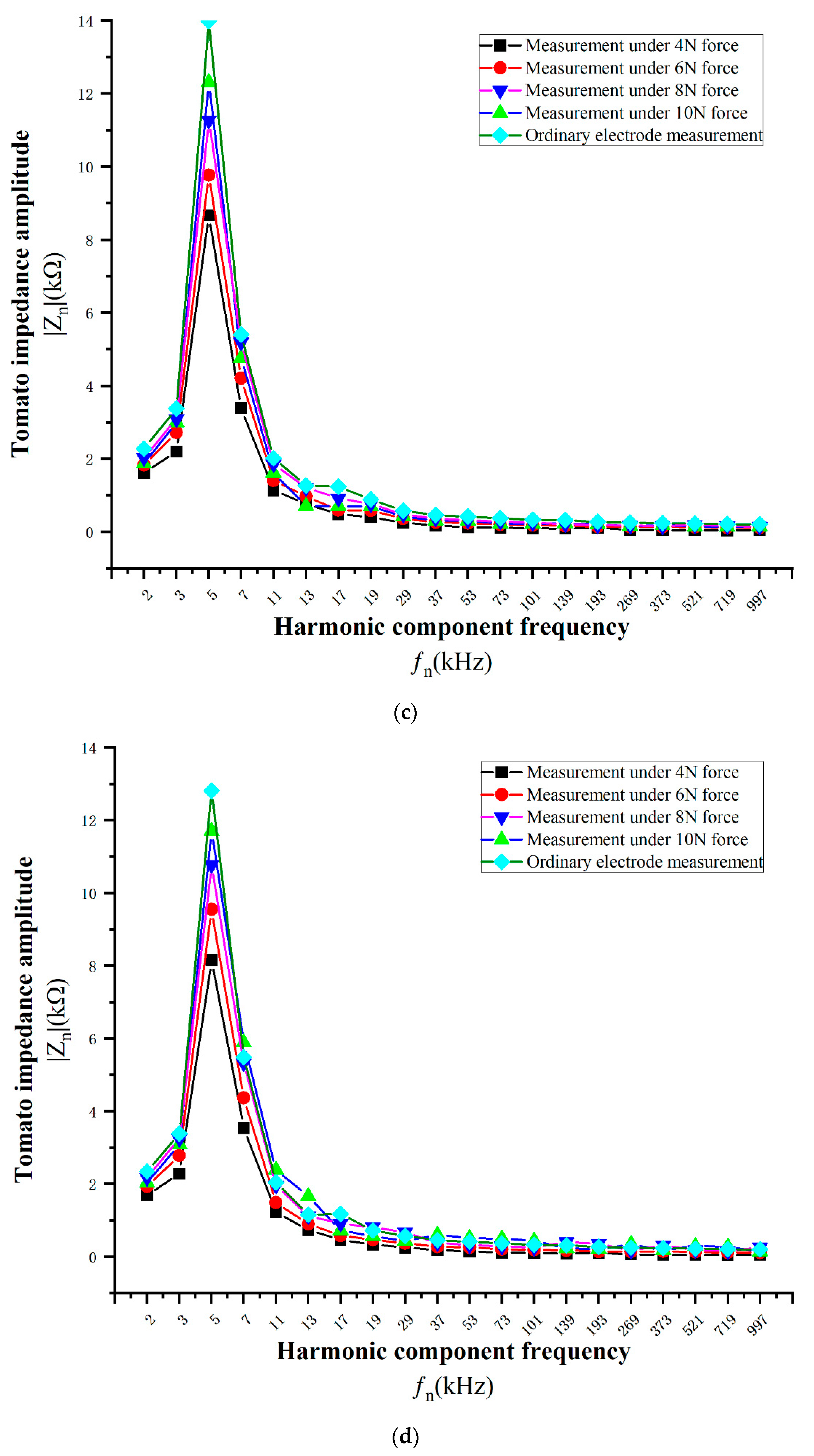
- When collecting tomatoes under a force of more than 10 N, the relative error between the electrical parameters obtained from FSR and the values obtained from ordinary electrode plates was within 10%, and within the frequency range of 2–13 kHz, the relative error of impedance values was within 5%.
- (3)
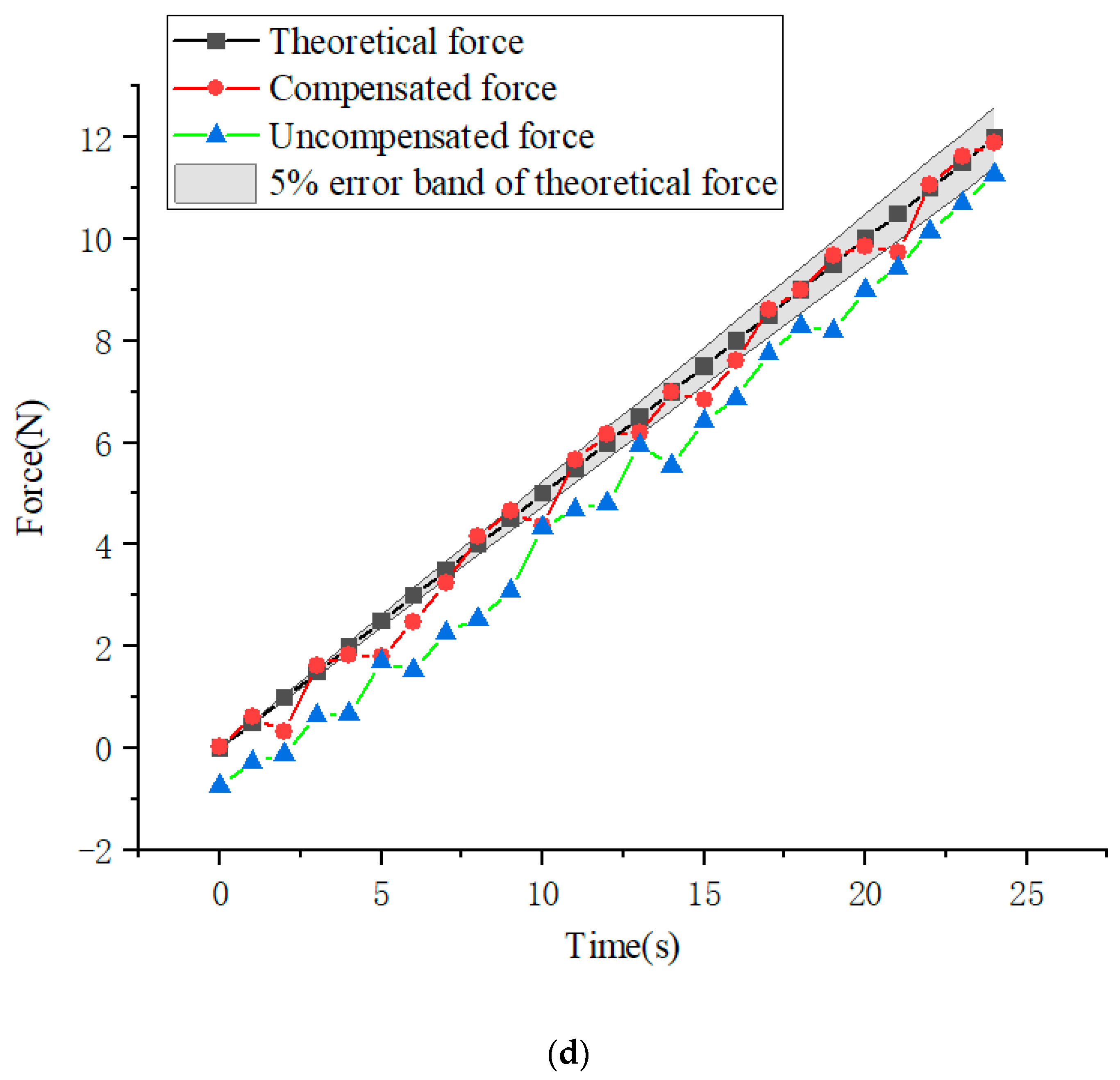
- When performing force control compensation, a frequency within 2–13 kHz and its corresponding tomato electrical parameter values should be chosen for a solution. The force calculated through compensation was clearly closer to the true value than the force calculated without compensation.
- (4)
- When tomatoes were placed for a long time, the impedance value corresponding to 5 kHz significantly increased as their maturity deepened. The impedance value in the pink phase was the highest, approaching 30. When tomatoes were placed for a short time, a series of chemical changes occurred within the tomato cells, which could cause fluctuations in the electrical parameters of the tomato over time.
- (5)
- The time required for impedance recognition was only 0.6 s, and the total recognition accuracy at one time reached 95%. The time for impedance recognition was 10 times lower than the current time for using machine-vision recognition, and the accuracy of one recognition was also 2.5 percentage points higher. Moreover, impedance recognition is not affected by lighting conditions, and different results will not be recognized for the same tomato under different lighting conditions. Moreover, visual recognition can only use the external performance of the tomato to determine its quality, but impedance detection can judge its internal qualities using the electrical parameters of the tomato.
4.2. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Z.; Xun, Y.; Wang, Y.; Yang, Q. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar]
- Zhou, T.; Zhang, D.; Zhou, M.; Xi, H.; Chen, X. System Design of Tomatoes Harvesting Robot Based on Binocular Vision. In Proceedings of the Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 1114–1118. [Google Scholar]
- Ansari, S.; Bhattacharya, B. Design and Development of a Tomato Picking Soft Robotic Gripper with a Separator and Mechanical Iris Based Pedicel Cutting Mechanism. In Proceedings of the 6th International Conference on System-Integrated Intelligence (SysInt), Genova, Italy, 7–9 September 2022; pp. 276–286. [Google Scholar]
- Guan, Z.; Li, H.; Zuo, Z.; Libo, P. Design a Robot System for Tomato Picking Based on YOLO v5. In Proceedings of the 16th IFAC Symposium on Large Scale Complex Systems—Theory and Applications (LSS), Xi’an, China, 22–24 April 2022; pp. 166–171. [Google Scholar]
- Bai, Y.; Mao, S.; Zhou, J.; Zhang, B. Clustered tomato detection and picking point location using machine learning-aided image analysis for automatic robotic harvesting. Precis. Agric. 2022, 24, 727–743. [Google Scholar] [CrossRef]
- Gao, G.; Wang, S.; Shuai, C.; Zhang, Z.; Zhang, S. Recognition and Detection of Greenhouse Tomatoes in Complex Environment. Traitement Du Signal 2022, 39, 291–298. [Google Scholar] [CrossRef]
- Zheng, T.; Jiang, M.; Li, Y.; Feng, M. Research on tomato detection in natural environment based on RC-YOLOv4. Comput. Electron. Agric. 2022, 198, 107029. [Google Scholar] [CrossRef]
- Rong, J.; Wang, P.; Wang, T.; Hu, L.; Yuan, T. Fruit pose recognition and directional orderly grasping strategies for tomato harvesting robots. Comput. Electron. Agric. 2022, 202, 107430. [Google Scholar] [CrossRef]
- Jin, Z.; Sun, W.; Zhang, J.; Shen, C.; Zhang, H.; Han, S. Intelligent Tomato Picking Robot System Based on Multimodal Depth Feature Analysis Method. In Proceedings of the 5th International Conference on Environmental Science and Material Application (ESMA), Xi’an, China, 19–20 December 2021. [Google Scholar]
- Haggag, M.; Abdelhay, S.; Mecheter, A.; Gowid, S.; Musharavati, F.; Ghani, S. An Intelligent Hybrid Experimental-Based Deep Learning Algorithm for Tomato-Sorting Controllers. IEEE Access 2019, 7, 106890–106898. [Google Scholar] [CrossRef]
- Li, J.; Xu, Y.; Zhu, W.; Wei, X.; Sun, H. Maturity assessment of tomato fruit based on electrical impedance spectroscopy. Int. J. Agric. Biol. Eng. 2019, 12, 154–161. [Google Scholar] [CrossRef]
- Arteaga, H.; Robleto-Martinez, E.; Silva, A.C.D.S.; Souto, S.; Batista, J.; Costa, E.J.X. Postharvest freezing process assessment of the blueberry structure in three acts: Bioimpedance, color, and granulometry analysis. LWT-Food Sci. Technol. 2021, 151, 112237. [Google Scholar] [CrossRef]
- Chowdhury, A.; Bera, T.K.; Ghoshal, D.; Chakraborty, B. Electrical Impedance Variations in Banana Ripening: An Analytical Study with Electrical Impedance Spectroscopy. J. Food Process Eng. 2017, 40, e12387. [Google Scholar] [CrossRef]
- Li, M.Q.; Li, J.Y.; Wei, X.H.; Wenjing, Z. Early diagnosis and monitoring of nitrogen nutrition stress in tomato leaves using electrical impedance spectroscopy. Int. J. Agric. Biol. Eng. 2017, 10, 194–205. [Google Scholar]
- Bauchot, A.D.; Harker, F.R.; Arnold, W.M. The use of electrical impedance spectroscopy to assess the physiological condition of kiwifruit. Postharvest Biol. Technol. 2000, 18, 9–18. [Google Scholar] [CrossRef]
- Al-Ali, A.; Maundy, B.; Allagui, A.; Elwakil, A. Optimum impedance spectroscopy circuit model identification using deep learning algorithms. J. Electroanal. Chem. 2022, 924, 116854. [Google Scholar] [CrossRef]
- Buss, E.; Aust, T.; Wahby, M.; Rabbel, T.L.; Kernbach, S.; Hamann, H. Stimulus classification with electrical potential and impedance of living plants: Comparing discriminant analysis and deep-learning methods. Bioinspir. Biomim. 2023, 18, 025003. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Liu, Y.; Yang, Y.; Zhang, Z. Assessment of tomato color by spatially resolved and conventional Vis/NIR spectroscopies. Spectrosc. Spectr. Anal. 2019, 39, 3585–3591, (In Chinese with English abstract). [Google Scholar]
- Wang, J.; Zhou, Y. Electronic-nose technique: Potential for monitoring maturity and shelf life of tomatoes. J. Agric. Res. 2007, 50, 1219–1228. [Google Scholar] [CrossRef]
- López Camelo, A.F.; Gómez, P.A. Comparison of color indexes for tomato ripening. Hortic. Bras. 2004, 22, 534–537. [Google Scholar] [CrossRef]
- Bao, G.; Yao, P.; Cai, S.; Ying, S.; Yang, Q. Flexible Pneumatic End-effector for Agricultural Robot: Design & Experiment. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 2175–2180. [Google Scholar]
- Gao, J.; Zhang, F.; Zhang, J.; Yuan, T.; Yin, J.; Guo, H.; Yang, C. Development and evaluation of a pneumatic finger-like end-effector for cherry tomato harvesting robot in greenhouse. Comput. Electron. Agric. 2022, 197, 106879. [Google Scholar] [CrossRef]
- Pei, M.; Xu, K.; Ding, X.; Jiang, S.; Gao, X. Design and Analysis of Continuous Rotating Multifunctional Mechanical Gripper. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2007–2012. [Google Scholar]
- Kallel, A.Y.; Bouchaala, D.; Kanoun, O. Critical implementation issues of excitation signals for embedded wearable bioimpedance spectroscopy systems with limited resources. Meas. Sci. Technol. 2021, 32, 084011. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, F.; Tao, K.; Wang, L.; Wen, H.; Teng, Z. Multi-frequency simultaneous measurement of bioimpedance spectroscopy based on a low crest factor multisine excitation. Physiol. Meas. 2015, 36, 489–501. [Google Scholar] [CrossRef]
- Vanderouderaa, E.; Schoukens, J.; Renneboog, J. Peak Factor Minimization Using a Time-Frequency Domain Swapping Algorithm. IEEE Trans. Instrum. Meas. 1988, 37, 145–147. [Google Scholar] [CrossRef]
- Vanderouderaa, E.; Schoukens, J.; Renneboog, J. Peak Factor Minimization of Input and Output Signals of Linear-Systems. IEEE Trans. Instrum. Meas. 1988, 37, 207–212. [Google Scholar] [CrossRef]
- Kumar, R.; Paul, V.; Pandey, R.; Sahoo, R.N.; Gupta, V.K. Reflectance based non-destructive determination of colour and ripeness of tomato fruits. Physiol. Mol. Biol. Plants 2022, 28, 275–288. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Y.; Song, Y.; Zhang, R.; Wang, X. Finding the lowest damage picking mode for tomatoes based on finite element analysis. Comput. Electron. Agric. 2023, 204, 107536. [Google Scholar] [CrossRef]
- Elwakil, A.S.; Maundy, B. Extracting the Cole-Cole impedance model parameters without direct impedance measurement. Electron. Lett. 2010, 46, 1367–1368. [Google Scholar] [CrossRef]
- Maundy, B.; Elwakil, A.S. Extracting single dispersion Cole-Cole impedance model parameters using an integrator setup. Analog. Integr. Circuits Signal Process. 2012, 71, 107–110. [Google Scholar] [CrossRef]
- Cole, K.S. Electric Impedance of Suspensions of Spheres. J. Gen. Physiol. 1928, 12, 29–36. [Google Scholar] [CrossRef]
- Zhou, K.; Xia, L.; Liu, J.; Qian, M.; Pi, J. Design of a flexible end-effector based on characteristics of tomatoes. Int. J. Agric. Biol. Eng. 2022, 15, 13–24. [Google Scholar] [CrossRef]
- Abdelhamid, M.A.; Sudnik, Y.; Alshinayyin, H.J.; Shaaban, F. Non-destructive method for monitoring tomato ripening based on chlo-rophyll fluorescence induction. J. Agric. Eng. 2021, 52, 1. [Google Scholar]
- Liu, J. Research progress analysis of greenhouse harvesting robot technology. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–18, (In Chinese with English abstract). [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (kHz) | 4 N Force | 6 N Force | 8 N Force | 10 N Force |
|---|---|---|---|---|
| 2 | 35.51% | 26.68% | 23.74% | 14.21% |
| 3 | 36.21% | 27.15% | 11.10% | 6.04% |
| 5 | 42.07% | 34.61% | 13.39% | 24.89% |
| 7 | 40.32% | 21.42% | 10.88% | 16.78% |
| 11 | 52.02% | 34.34% | 22.76% | 10.87% |
| 13 | 49.89% | 31.32% | 47.52% | 9.45% |
| 17 | 65.49% | 64.29% | 42.45% | 23.64% |
| 19 | 66.82% | 45.54% | 30.41% | 25.78% |
| 29 | 62.19% | 49.94% | 28.54% | 22.48% |
| 37 | 67.66% | 51.96% | 32.21% | 29.33% |
| 53 | 76.09% | 42.70% | 34.94% | 27.84% |
| 73 | 78.37% | 53.30% | 51.55% | 25.49% |
| 101 | 76.29% | 44.69% | 47.08% | 25.23% |
| 139 | 82.73% | 45.55% | 36.81% | 31.43% |
| 193 | 64.77% | 53.37% | 28.36% | 39.34% |
| 269 | 88.86% | 53.91% | 46.25% | 32.90% |
| 373 | 91.94% | 49.71% | 26.26% | 43.28% |
| 521 | 85.11% | 53.11% | 34.30% | 18.85% |
| 719 | 78.42% | 55.66% | 34.25% | 37.02% |
| 997 | 87.44% | 56.07% | 40.16% | 34.18% |
| Mean of Error | 66.41% | 44.77% | 32.15% | 24.95% |
| Frequency (kHz) | 4 N Force | 6 N Force | 8 N Force | 10 N Force |
|---|---|---|---|---|
| 2 | 33.98% | 19.01% | 17.43% | 8.77% |
| 3 | 38.53% | 22.17% | 15.76% | 4.72% |
| 5 | 42.10% | 35.35% | 9.72% | 24.90% |
| 7 | 41.53% | 22.22% | 11.07% | 10.44% |
| 11 | 41.32% | 30.06% | 18.02% | 13.53% |
| 13 | 41.25% | 25.33% | 49.81% | 9.89% |
| 17 | 65.17% | 56.25% | 44.49% | 24.05% |
| 19 | 59.93% | 40.58% | 22.87% | 17.83% |
| 29 | 60.63% | 41.00% | 24.52% | 23.37% |
| 37 | 61.07% | 39.85% | 31.65% | 23.98% |
| 53 | 67.46% | 40.16% | 31.14% | 25.01% |
| 73 | 68.80% | 45.47% | 38.82% | 27.37% |
| 101 | 69.66% | 48.63% | 35.46% | 25.05% |
| 139 | 80.73% | 48.10% | 27.56% | 37.44% |
| 193 | 64.88% | 51.28% | 24.76% | 37.26% |
| 269 | 81.55% | 48.31% | 45.88% | 38.47% |
| 373 | 85.45% | 45.76% | 29.22% | 40.20% |
| 521 | 80.68% | 51.33% | 35.51% | 16.51% |
| 719 | 81.62% | 51.21% | 35.56% | 27.99% |
| 997 | 80.91% | 47.10% | 38.28% | 33.96% |
| Mean of Error | 62.36% | 40.46% | 29.38% | 23.54% |
| Frequency (kHz) | 4 N Force | 6 N Force | 8 N Force | 10 N Force |
|---|---|---|---|---|
| 2 | 29.07% | 19.36% | 17.67% | 10.80% |
| 3 | 34.88% | 19.50% | 11.19% | 8.47% |
| 5 | 38.04% | 30.17% | 12.02% | 19.51% |
| 7 | 37.28% | 22.13% | 11.82% | 3.92% |
| 11 | 43.78% | 30.36% | 19.96% | 7.58% |
| 13 | 39.81% | 23.48% | 44.38% | 4.59% |
| 17 | 61.22% | 52.21% | 43.15% | 25.73% |
| 19 | 54.53% | 34.60% | 21.53% | 13.58% |
| 29 | 57.02% | 37.83% | 28.31% | 18.07% |
| 37 | 62.87% | 42.87% | 32.80% | 20.78% |
| 53 | 70.03% | 42.68% | 26.95% | 23.72% |
| 73 | 68.94% | 46.26% | 39.56% | 22.68% |
| 101 | 72.81% | 44.00% | 32.56% | 24.64% |
| 139 | 72.25% | 47.21% | 27.33% | 31.52% |
| 193 | 61.76% | 49.67% | 23.27% | 34.36% |
| 269 | 77.84% | 46.41% | 40.12% | 32.74% |
| 373 | 81.15% | 42.80% | 26.33% | 36.42% |
| 521 | 79.83% | 42.24% | 36.18% | 18.12% |
| 719 | 80.70% | 45.11% | 33.55% | 24.24% |
| 997 | 75.18% | 43.50% | 28.73% | 29.10% |
| Mean of Error | 59.95% | 38.12% | 27.87% | 20.53% |
| Frequency (kHz) | 4 N Force | 6 N Force | 8 N Force | 10 N Force |
|---|---|---|---|---|
| 2 | 27.78% | 17.56% | 13.07% | 7.08% |
| 3 | 32.58% | 17.91% | 8.67% | 4.09% |
| 5 | 36.38% | 25.52% | 8.63% | 15.94% |
| 7 | 35.50% | 20.42% | 7.38% | 2.90% |
| 11 | 40.11% | 27.03% | 16.84% | 4.02% |
| 13 | 36.48% | 21.92% | 44.18% | 3.19% |
| 17 | 60.55% | 50.98% | 38.54% | 22.42% |
| 19 | 53.54% | 34.32% | 21.31% | 12.37% |
| 29 | 56.22% | 35.65% | 24.29% | 17.27% |
| 37 | 58.75% | 39.55% | 31.19% | 17.03% |
| 53 | 65.77% | 37.77% | 24.80% | 21.64% |
| 73 | 68.67% | 44.35% | 36.65% | 20.84% |
| 101 | 68.23% | 41.37% | 32.49% | 22.09% |
| 139 | 71.70% | 43.66% | 26.54% | 30% |
| 193 | 59.99% | 46.62% | 22.52% | 31.07% |
| 269 | 74.76% | 43.97% | 36.85% | 31.39% |
| 373 | 77.69% | 38.13% | 25.84% | 32.57% |
| 521 | 77.14% | 41.55% | 33.15% | 15.21% |
| 719 | 76.39% | 44.92% | 32.90% | 24.18% |
| 997 | 73.90% | 42.85% | 28.70% | 28.68% |
| Mean of Error | 57.61% | 35.80% | 25.73% | 18.20% |
| Maturity Period | MG | BR | TU | PNK | Re-Check |
|---|---|---|---|---|---|
| Total number of tomatoes | 25 | 25 | 25 | 25 | 0 |
| Identify quantity | 26 | 24 | 24 | 24 | 2 |
| Recognition error | 1 | 1 | 0 | 1 | |
| Total recognition accuracy | 95% | ||||
| Maturity Period | MG | BR | TU | PNK | Re-Check |
|---|---|---|---|---|---|
| Total number of tomatoes | 25 | 25 | 25 | 25 | 0 |
| Identify quantity | 26 | 25 | 25 | 24 | 0 |
| Recognition error | 2 | 1 | 0 | 0 | |
| Total recognition accuracy | 97% | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Amin, A.; Zhang, Y.; Wang, X.; Chen, G.; Abdelhamid, M.A. Design of a Tomato Sorting Device Based on the Multisine-FSR Composite Measurement. Agronomy 2023, 13, 1778. https://doi.org/10.3390/agronomy13071778
Yang Z, Amin A, Zhang Y, Wang X, Chen G, Abdelhamid MA. Design of a Tomato Sorting Device Based on the Multisine-FSR Composite Measurement. Agronomy. 2023; 13(7):1778. https://doi.org/10.3390/agronomy13071778
Chicago/Turabian StyleYang, Zizhao, Ahmed Amin, Yongnian Zhang, Xiaochan Wang, Guangming Chen, and Mahmoud A. Abdelhamid. 2023. "Design of a Tomato Sorting Device Based on the Multisine-FSR Composite Measurement" Agronomy 13, no. 7: 1778. https://doi.org/10.3390/agronomy13071778