
Field–Road Operation Classification of Agricultural Machine GNSS Trajectories Using Spatio-Temporal Neural Network


Abstract
:1. Introduction
2. Materials and Methods
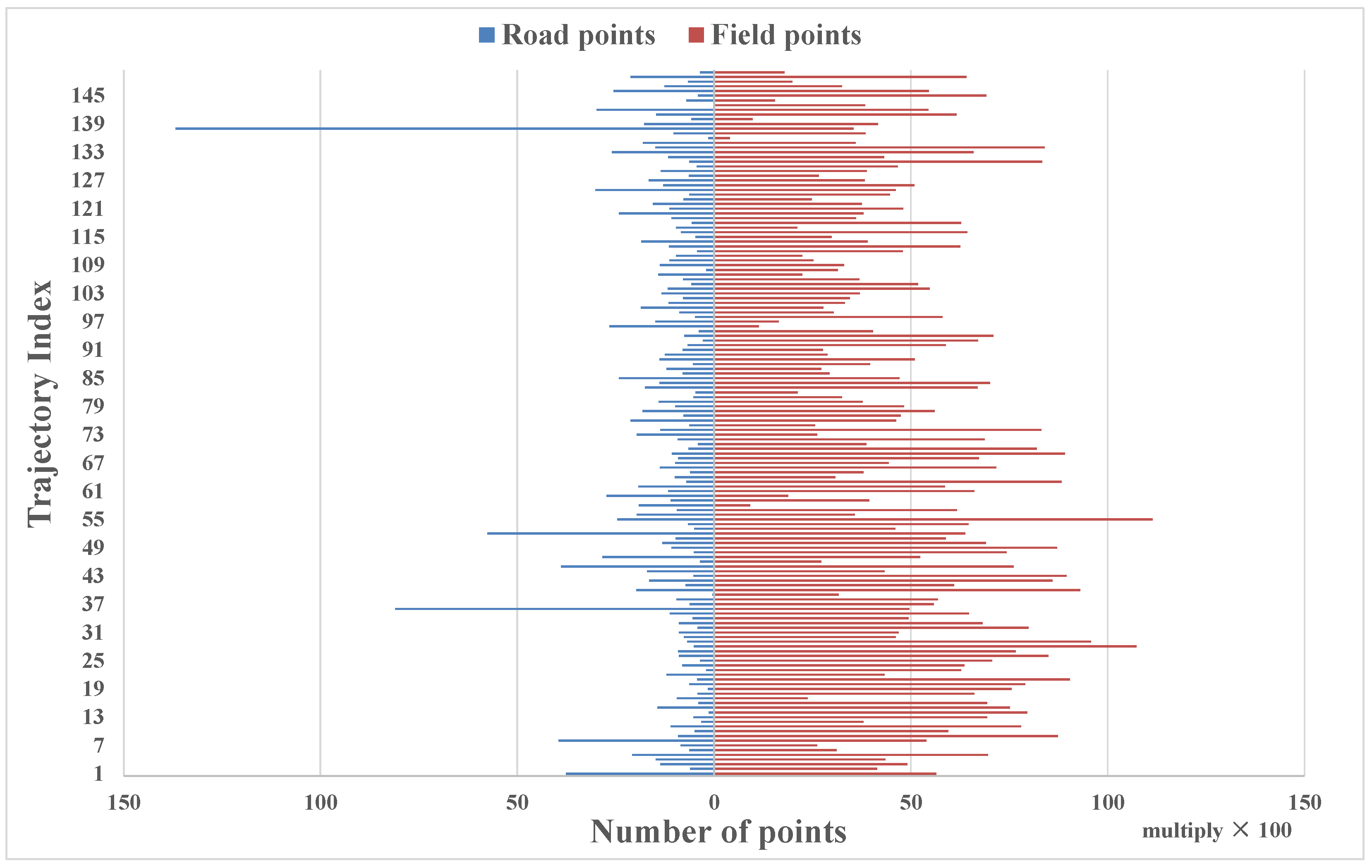
2.1. Dataset
2.2. Overview
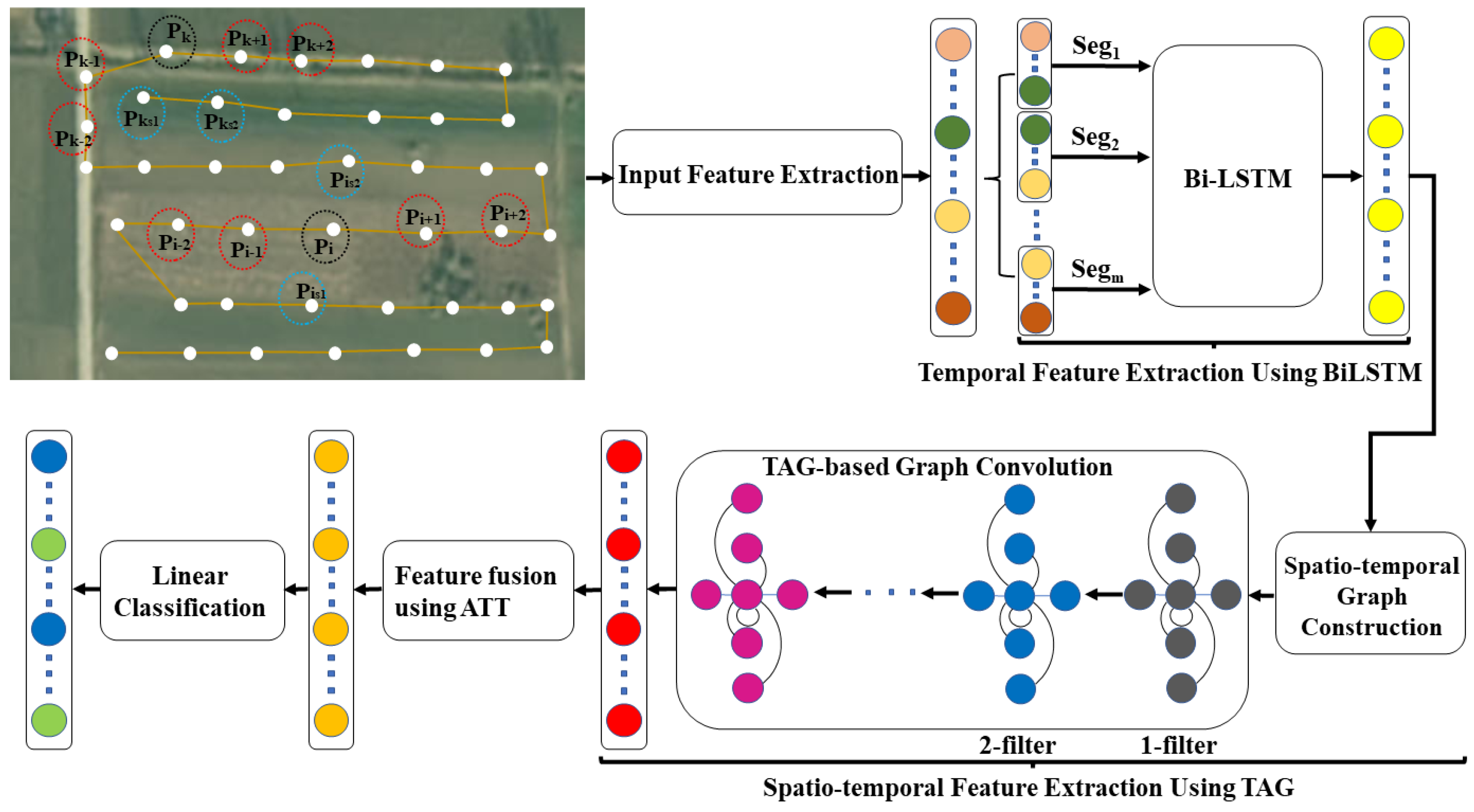
- Input feature extraction was performed to prepare the data for subsequent processing. Each point in the dataset was represented by a seven-dimensional vector, derived from the five parameters recorded for that point. This vectorization approach was adopted to enhance the subsequent feature extraction process.
- Temporal feature extraction using BiLSTM was performed using a BiLSTM network. This approach facilitates the extraction of global motion information for each point in the dataset, taking into account the temporal relationships among all points within a trajectory. By modeling the sequence of points along the timeline of a trajectory, the BiLSTM network represents each point as a feature vector, which encapsulates its associated motion information.
- Spatio-temporal feature extraction using TAG: TAG is a cutting-edge neural network that has been designed to extract spatio-temporal information by analyzing the neighboring regions of a given point. The TAG network plays a pivotal role in generating a feature vector that encapsulates the spatio-temporal relationships between the point and its neighbors. The TAG network adapts to the topology of the graph to detect spatial and temporal information, ensuring that the network effectively captures the underlying motion patterns in the data. The generated feature vector serves as the input to the subsequent ATT network.
- Feature fusion using ATT: The ATT network employs a weighted fusion strategy based on the importance of each feature in the input vector to obtain a final feature vector. By incorporating the ATT network, certain features can be selectively emphasized or suppressed based on their relevance, thus improving the overall accuracy of the model.
- Linear classification uses a fully connected layer and a softmax function to perform linear classification on the feature vectors generated by the ATT network. The primary objective of the classification stage was to discern the category of each point in the dataset. In other words, this classification aimed to determine whether each point belonged to the “road” or “field” category.
2.3. Input Feature Extraction
2.4. Temporal Feature Extraction Using BiLSTM
2.5. Spatio-Temporal Feature Extraction Using TAG
2.5.1. Spatio-Temporal Graph Construction
2.5.2. TAG-Based Graph Convolution
2.6. Feature Fusion Using ATT
2.7. Linear Classification
3. Results and Discussion
3.1. Experimental Settings
3.1.1. Baseline Method
3.1.2. Model Training and Validation
3.1.3. Implementation Details
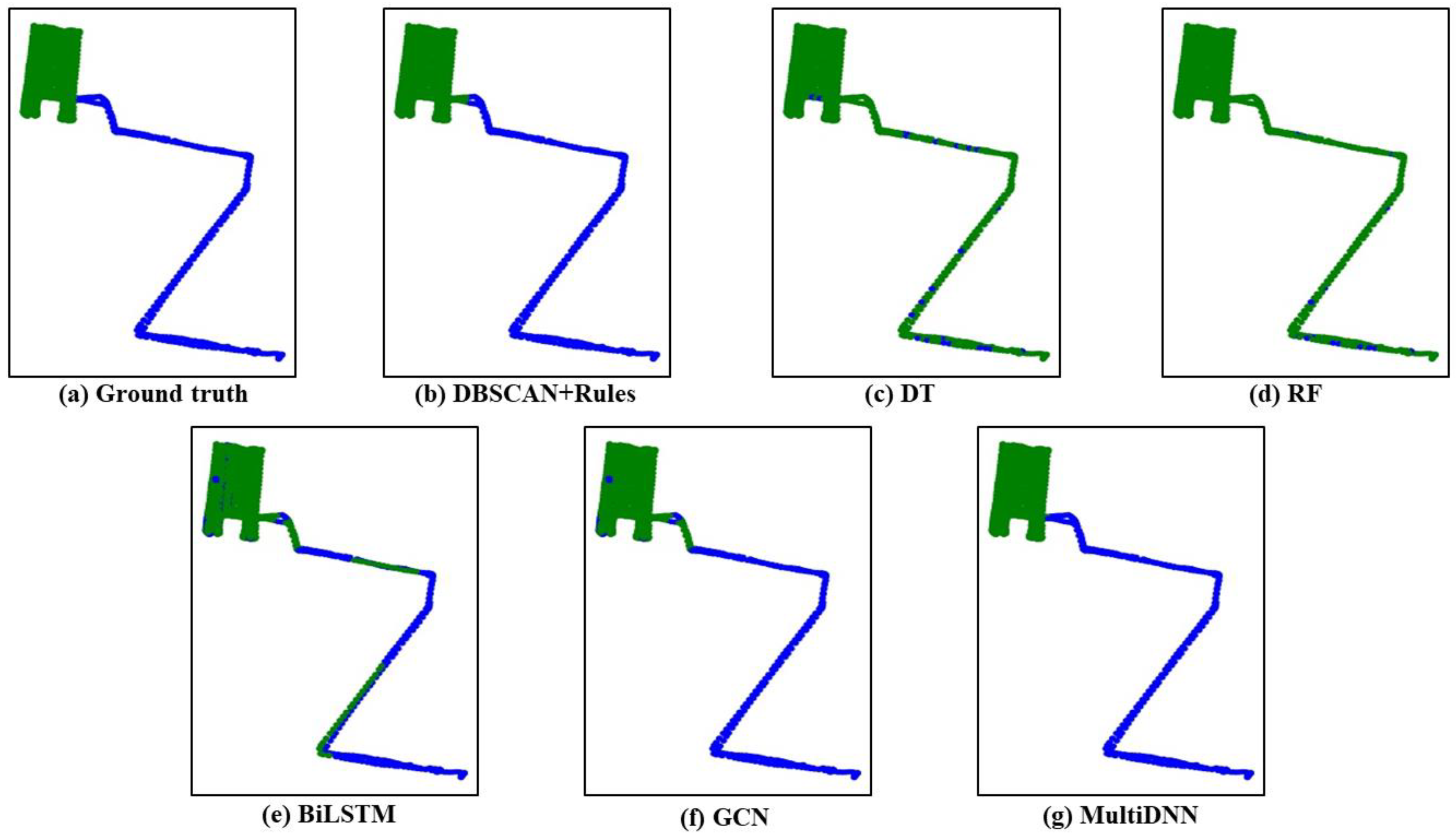
3.2. Method Comparisons and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Huang, Z.; Zhang, X.; Reardon, T. The Rapid Rise of Cross-Regional Agricultural Mechanization Services in China. Am. J. Agric. Econ. 2013, 95, 1245–1251. [Google Scholar] [CrossRef]
- Wang, X.; Yamauchi, F.; Huang, J. Rising Wages, Mechanization, and the Substitution between Capital and Labor: Evidence from Small Scale Farm System in China. Agric. Econ. 2016, 47, 309–317. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, J.; Thomas, R. Mechanization Outsourcing Clusters and Division of Labor in Chinese Agriculture. China Econ. Rev. 2017, 43, 184–195. [Google Scholar] [CrossRef]
- Jeon, C.W.; Kim, H.J.; Yun, C.; Gang, M.S.; Han, X. An Entry-Exit Path Planner for an Autonomous Tractor in a Paddy Field. Comput. Electron. Agric. 2021, 191, 106548. [Google Scholar] [CrossRef]
- Paraforos, D.S.; Hübner, R.; Griepentrog, H.W. Automatic Determination of Headland Turning from Auto-Steering Position Data for Minimising the Infield Non-Working Time. Comput. Electron. Agric. 2018, 152, 393–400. [Google Scholar] [CrossRef]
- Grisso, R.D.; Kocher, M.F.; Adamchuk, V.I.; Jasa, P.J.; Schroeder, M.A. Field Efficiency Determination Using Traffic Pattern Indices. Appl. Eng. Agric. 2004, 20, 563–572. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Green, O.; Moshou, D.; Olesen, J. Effect of Controlled Traffic on Field Efficiency. Biosyst. Eng. 2010, 106, 14–25. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Wu, C.; Li, G. Field-Road Trajectory Segmentation for Agricultural Machinery Based on Direction Distribution. Comput. Electron. Agric. 2021, 186, 106180. [Google Scholar] [CrossRef]
- Poteko, J.; Eder, D.; Noack, P.O. Identifying Operation Modes of Agricultural Vehicles Based on GNSS Measurements. Comput. Electron. Agric. 2021, 185, 106105. [Google Scholar] [CrossRef]
- Chen, Y.; Li, G.; Zhang, X.; Jia, J.; Zhou, K.; Wu, C. Identifying Field and Road Modes of Agricultural Machinery Based on GNSS Recordings: A Graph Convolutional Neural Network Approach. Comput. Electron. Agric. 2022, 198, 107082. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y.; Jia, J.; Kuang, K.; Lan, Y.; Wu, C. Multi-View Density-Based Field-Road Classification for Agricultural Machinery: DBSCAN and Object Detection. Comput. Electron. Agric. 2022, 200, 107263. [Google Scholar] [CrossRef]
- Davies, D.L.; Bouldin, D.W. A Cluster Separation Measure. IEEE Trans. Pattern Anal. Mach. Intell. 1979, PAMI-1, 224–227. [Google Scholar] [CrossRef]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The Performance of LSTM and BiLSTM in Forecasting Time Series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar]
- Du, J.; Zhang, S.; Wu, G.; Moura, J.; Kar, S. Topology Adaptive Graph Convolutional Networks. arXiv 2017, arXiv:1710.10370. [Google Scholar]
- Biswas, A.; Morris, B.T. TAGCN: Topology-Aware Graph Convolutional Network for Trajectory Prediction. In Proceedings of the 15th International Symposium, ISVC 2020, San Diego, CA, USA, 5–7 October 2020; pp. 542–553. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. In Advances in Neural Information Processing Systems; Mit Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Liu, G.; Guo, J. Bidirectional LSTM with Attention Mechanism and Convolutional Layer for Text Classification. Neurocomputing 2019, 337, 325–338. [Google Scholar] [CrossRef]
- Fukui, H.; Hirakawa, T.; Yamashita, T.; Fujiyoshi, H. Attention Branch Network: Learning of Attention Mechanism for Visual Explanation. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 10697–10706. [Google Scholar]
- Wu, C.; Li, D.; Zhang, X.; Pan, J.; Quan, L.; Yang, L.; Yang, W.; Ma, Q.; Su, C.; Zhai, W. China’s Agricultural Machinery Operation Big Data System. Comput. Electron. Agric. 2023, 205, 107594. [Google Scholar] [CrossRef]
- Sina Dabiri, K.H. Inferring Transportation Modes from GPS Trajectories Using a Convolutional Neural Network.
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, K.; Gupta, R.R.; Vyas, K.; Mishra, B. Exploring Alternatives to Softmax Function. In Proceedings of the Proceedings of the 2nd International Conference on Deep Learning Theory and Applications, Online, 7–9 July 2021; SCITEPRESS—Science and Technology Publications: Setúbal, Portugal; pp. 81–86. [Google Scholar]
- Dabiri, S.; Marković, N.; Heaslip, K.; Reddy, C.K. A Deep Convolutional Neural Network Based Approach for Vehicle Classification Using Large-Scale GPS Trajectory Data. Transp. Res. Part. C Emerg. Technol. 2020, 116, 102644. [Google Scholar] [CrossRef]
- Görtler, J.; Hohman, F.; Moritz, D.; Wongsuphasawat, K.; Ren, D.; Nair, R.; Kirchner, M.; Patel, K. Neo: Generalizing Confusion Matrix Visualization to Hierarchical and Multi-Output Labels. In Proceedings of the CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 30 April–5 May 2022; ACM: New York, NY, USA, 2022; pp. 1–13. [Google Scholar]
- Sharma, A.; Wehrheim, H. Testing Machine Learning Algorithms for Balanced Data Usage. In Proceedings of the 2019 12th IEEE Conference on Software Testing, Validation and Verification (ICST), Xi′an, China, 22–27 April 2019; pp. 125–135. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; Volume 32, pp. 8026–8037. [Google Scholar]
- Balles, L.; Hennig, P. Dissecting Adam: The Sign, Magnitude and Variance of Stochastic Gradients. In Proceedings of the International Conference on Machine Learning, Virtual, 13–18 July 2020. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Pre | Rec | F1 | Acc |
|---|---|---|---|---|
| DBSCAN + Rules | 77.84 | 65.50 | 68.31 | 84.65 |
| DT | 68.16 | 52.10 | 49.48 | 81.37 |
| RF | 73.75 | 52.69 | 50.43 | 81.97 |
| BiLSTM | 81.06 | 70.11 | 72.82 | 86.34 |
| GCN | 80.66 | 72.92 | 75.14 | 86.96 |
| MultiDNN | 85.62 | 78.37 | 80.80 | 89.75 |
| Field | Road | |||||
|---|---|---|---|---|---|---|
| Method | Pre | Rec | F1 | Pre | Rec | F1 |
| DBSCAN + Rules | 86.47 | 96.19 | 91.03 | 69.21 | 34.81 | 45.59 |
| DT | 82.07 | 98.79 | 89.60 | 54.25 | 5.42 | 9.36 |
| RF | 82.27 | 99.29 | 89.94 | 65.22 | 6.09 | 10.91 |
| BiLSTM | 88.15 | 96.29 | 91.97 | 73.97 | 43.93 | 53.67 |
| GCN | 89.19 | 95.67 | 92.26 | 72.13 | 50.16 | 58.03 |
| MultiDNN | 91.34 | 96.67 | 93.88 | 79.91 | 60.08 | 67.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Li, G.; Zhou, K.; Wu, C. Field–Road Operation Classification of Agricultural Machine GNSS Trajectories Using Spatio-Temporal Neural Network. Agronomy 2023, 13, 1415. https://doi.org/10.3390/agronomy13051415
Chen Y, Li G, Zhou K, Wu C. Field–Road Operation Classification of Agricultural Machine GNSS Trajectories Using Spatio-Temporal Neural Network. Agronomy. 2023; 13(5):1415. https://doi.org/10.3390/agronomy13051415
Chicago/Turabian StyleChen, Ying, Guangyuan Li, Kun Zhou, and Caicong Wu. 2023. "Field–Road Operation Classification of Agricultural Machine GNSS Trajectories Using Spatio-Temporal Neural Network" Agronomy 13, no. 5: 1415. https://doi.org/10.3390/agronomy13051415