

Rapid and Accurate Prediction of Soil Texture Using an Image-Based Deep Learning Autoencoder Convolutional Neural Network Random Forest (DLAC-CNN-RF) Algorithm

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
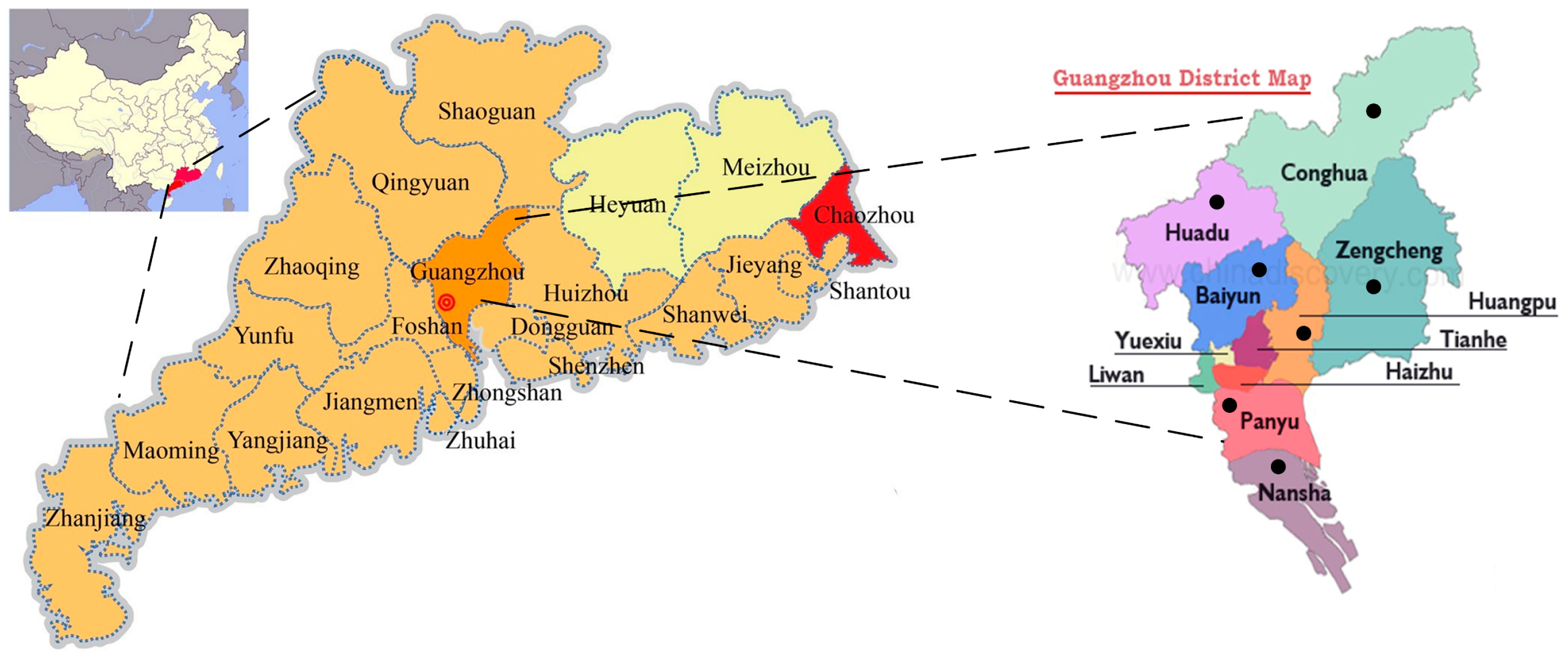
2.1. Sample Preparation
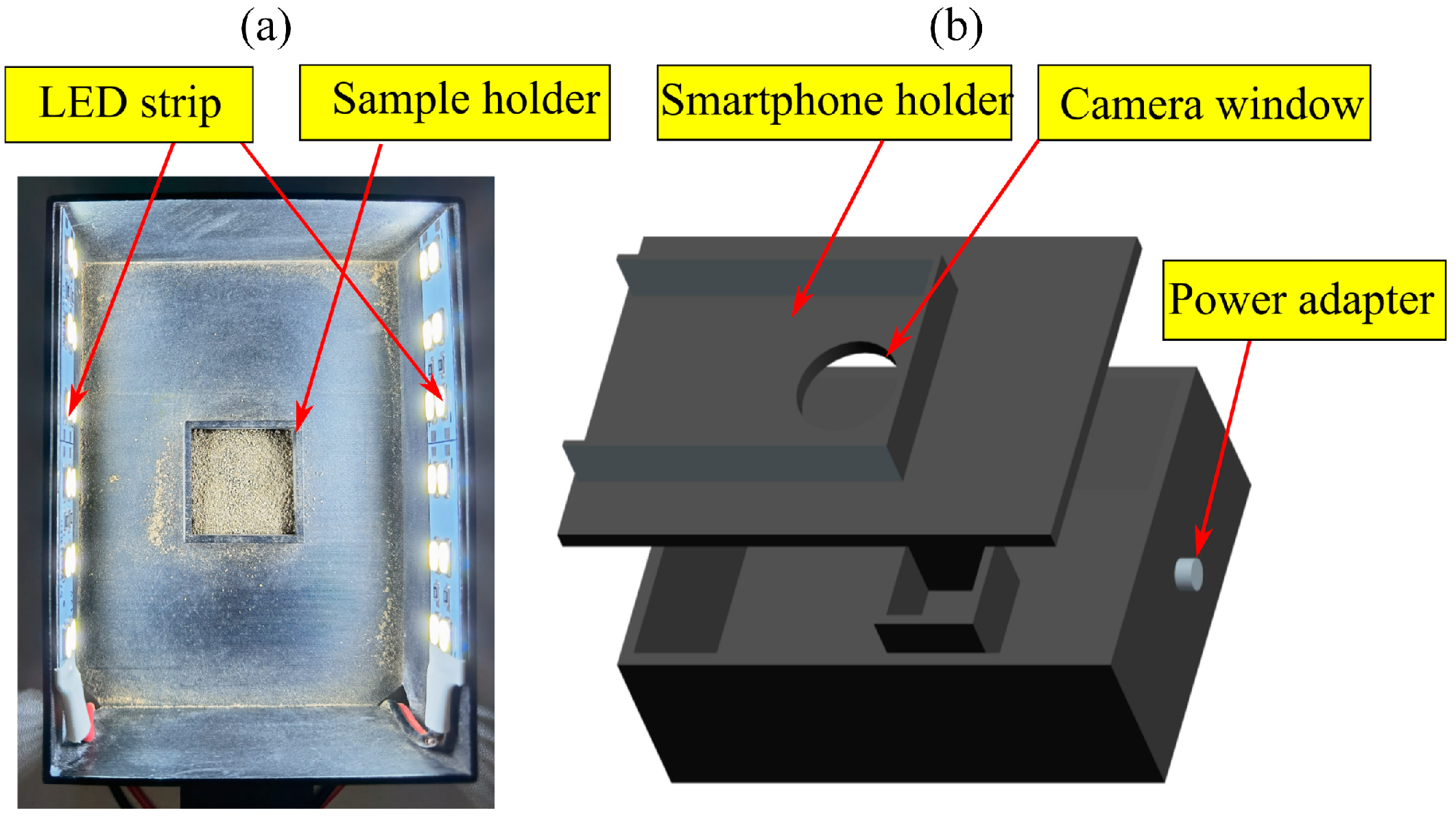
2.2. Image Acquisition
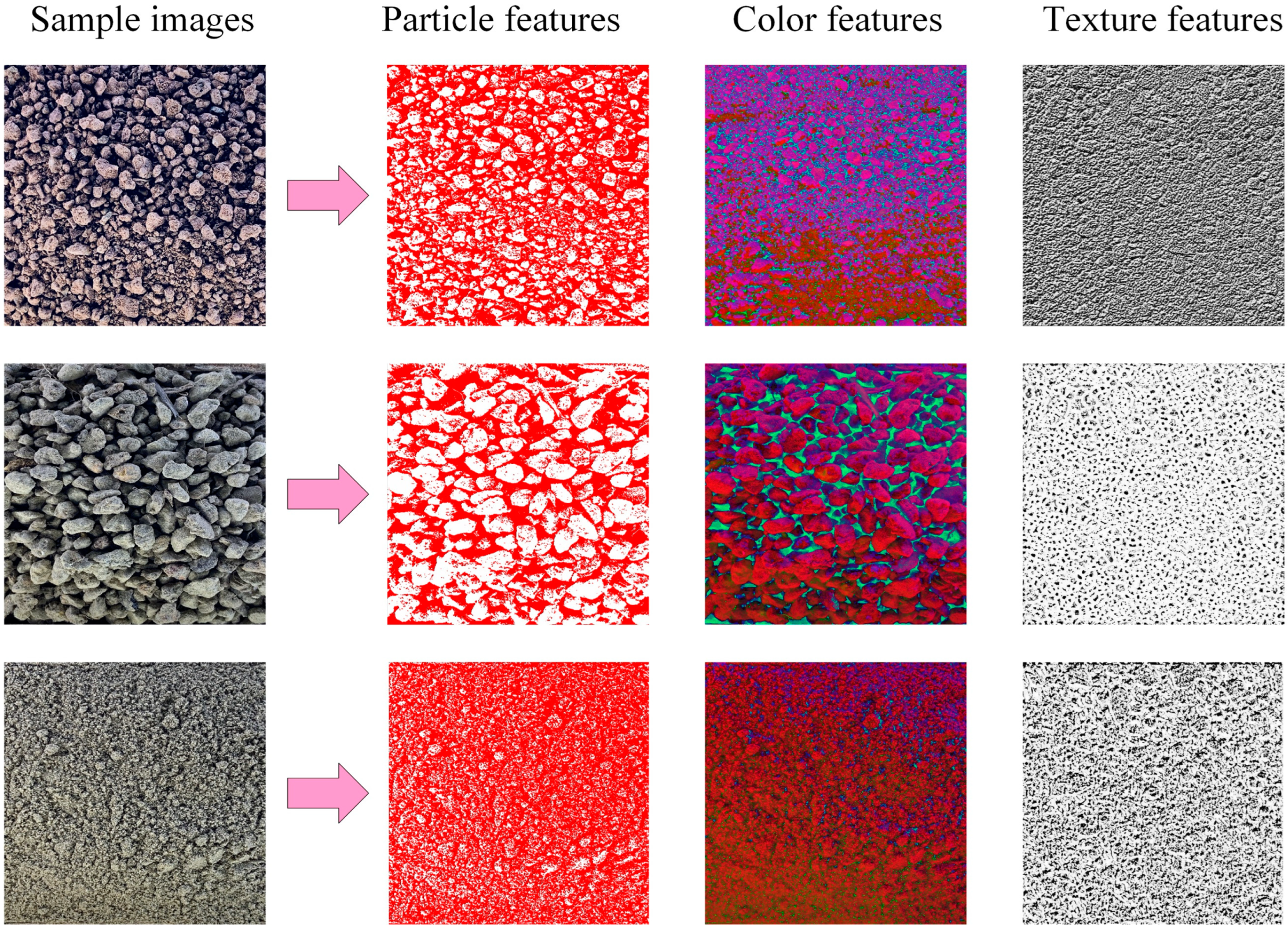
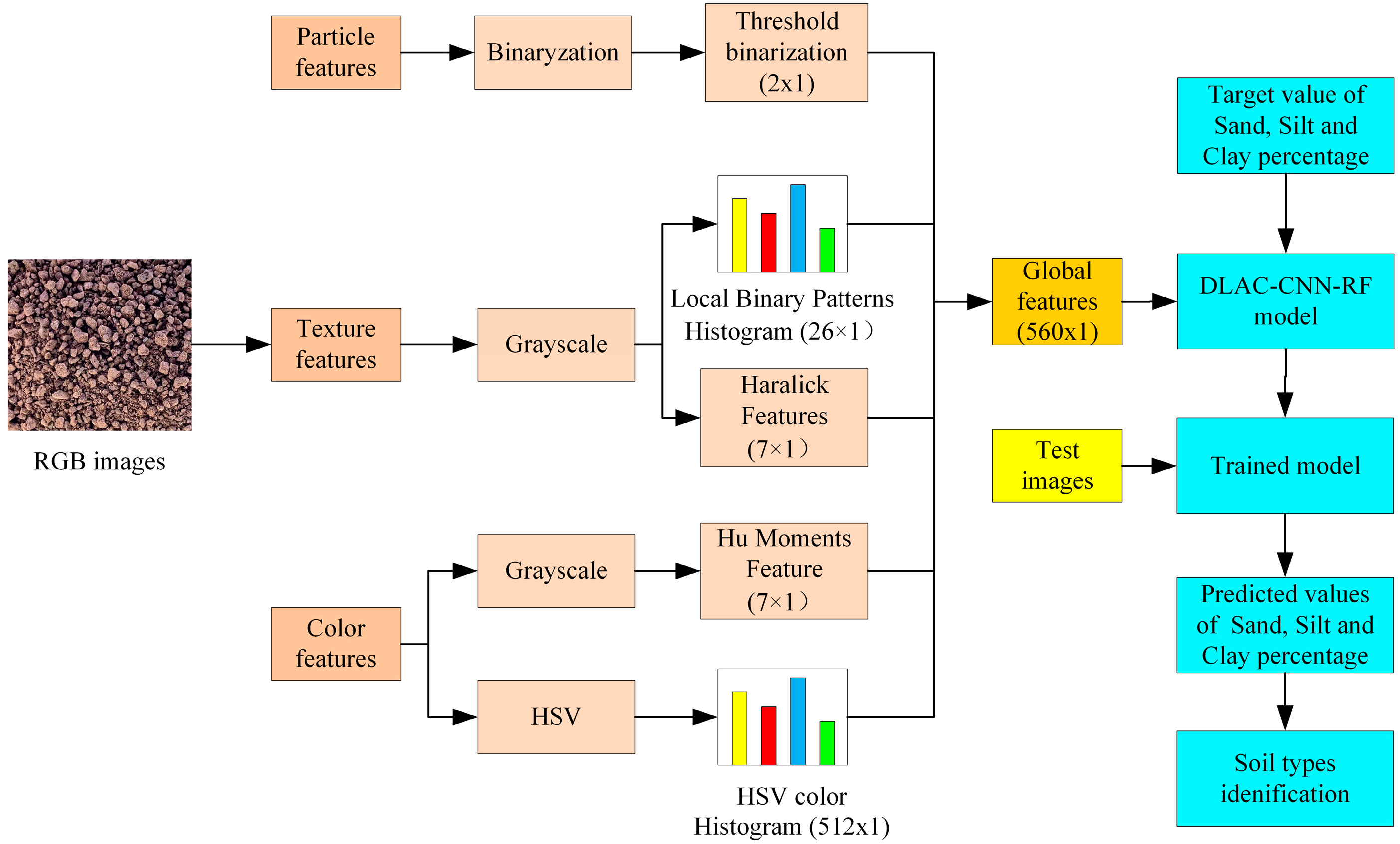
2.3. Image Feature Extraction
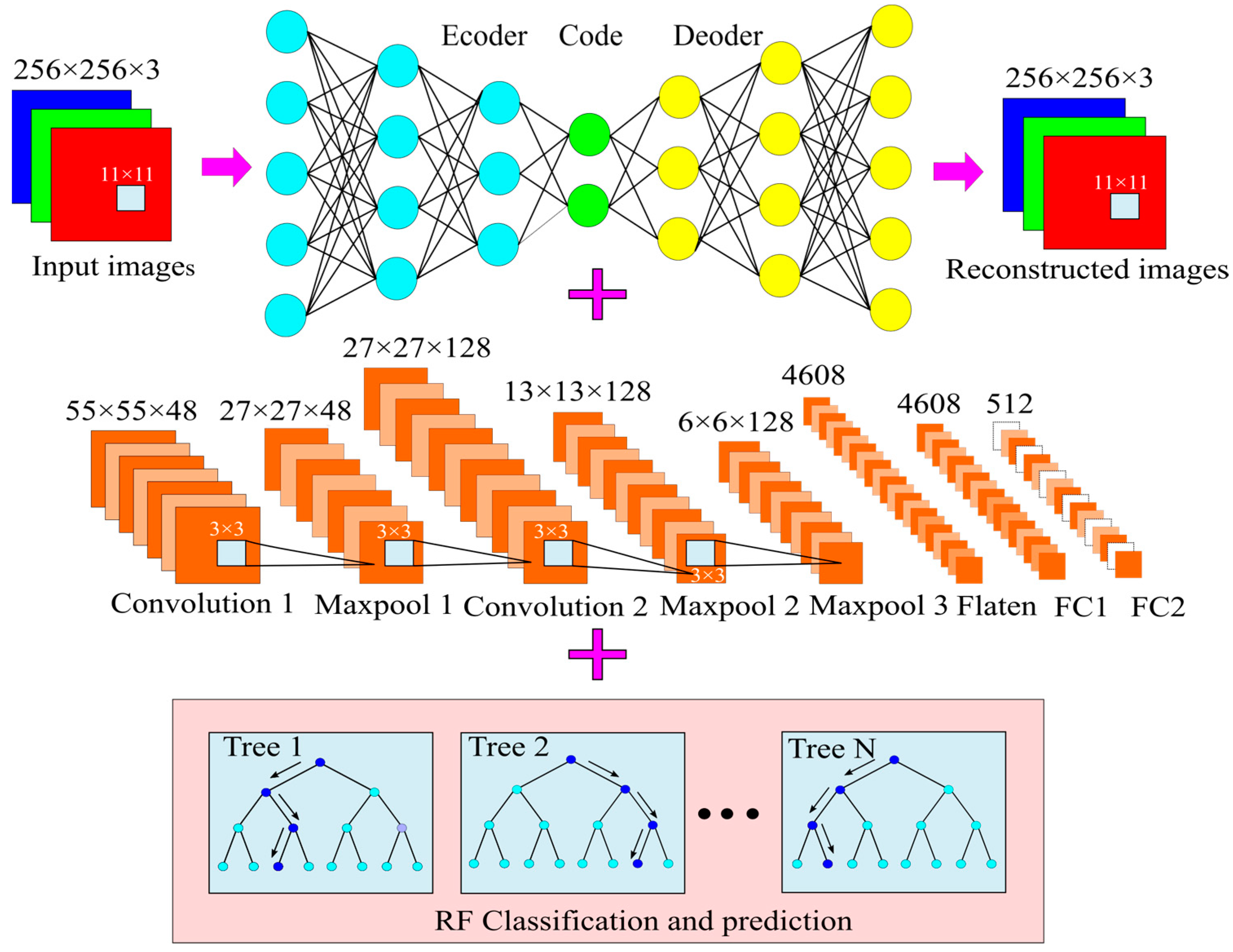
2.4. Developing a DLAC-CNN-RF Model
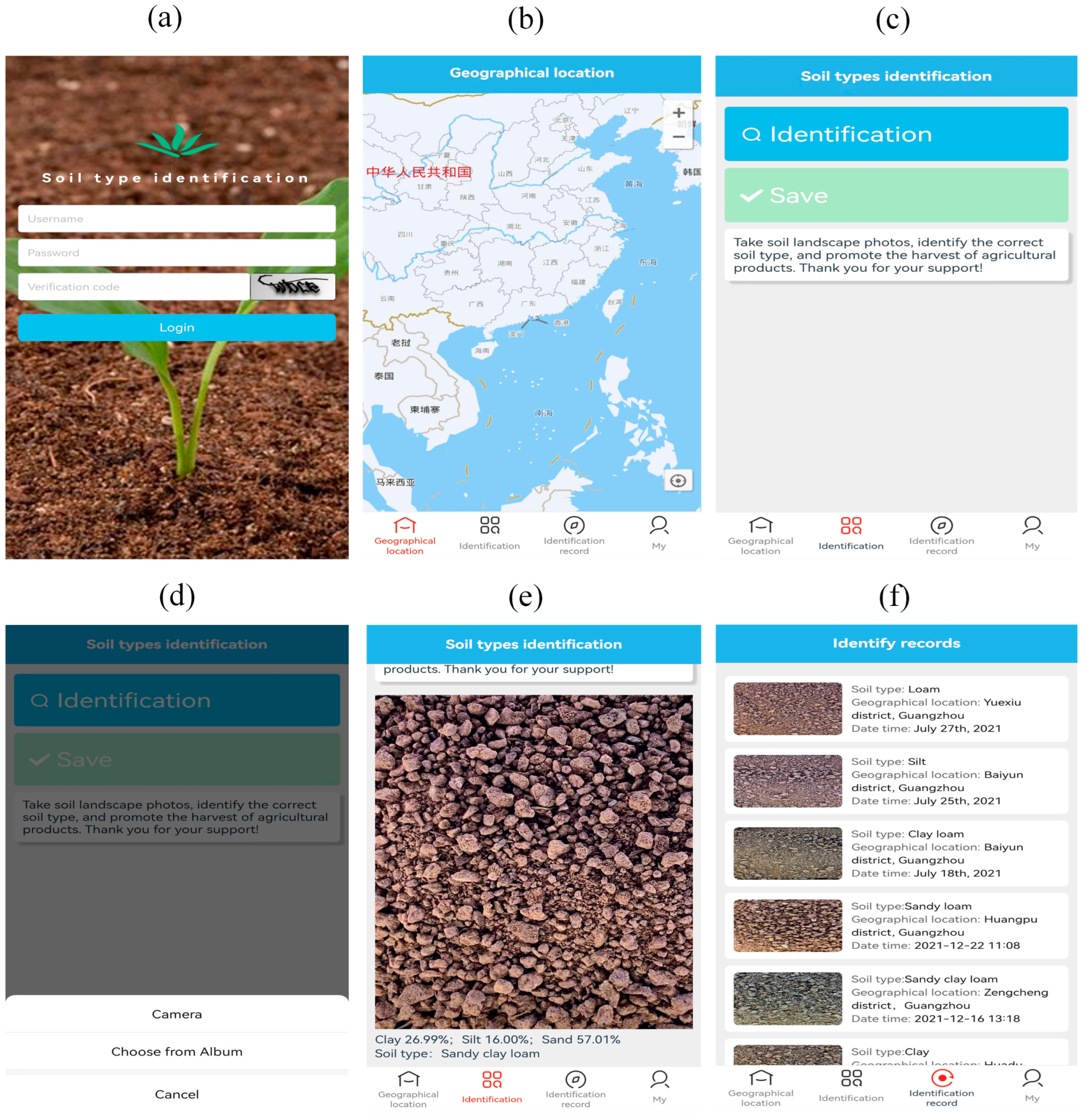
2.5. Developing a Graphical User Interface
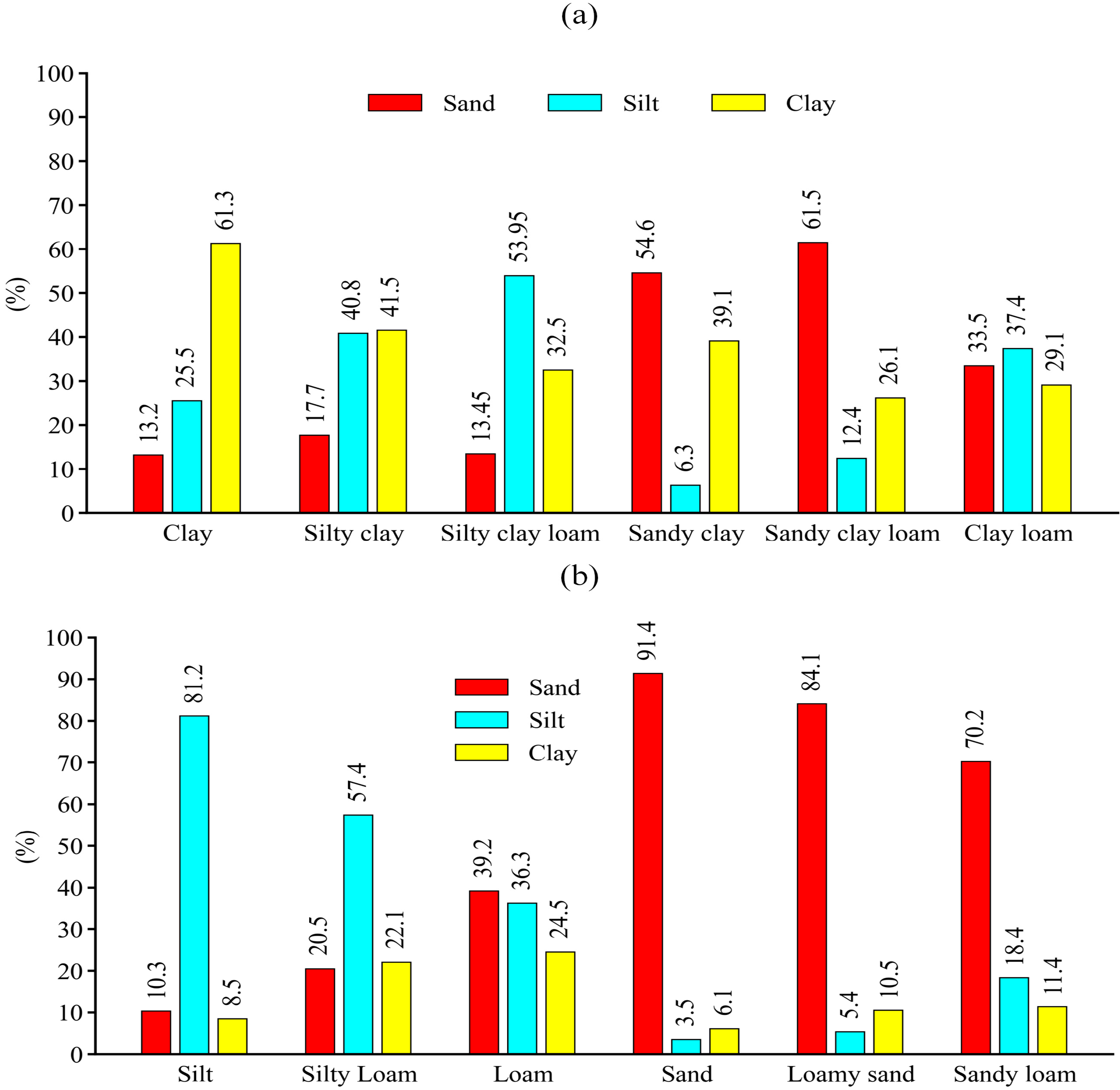
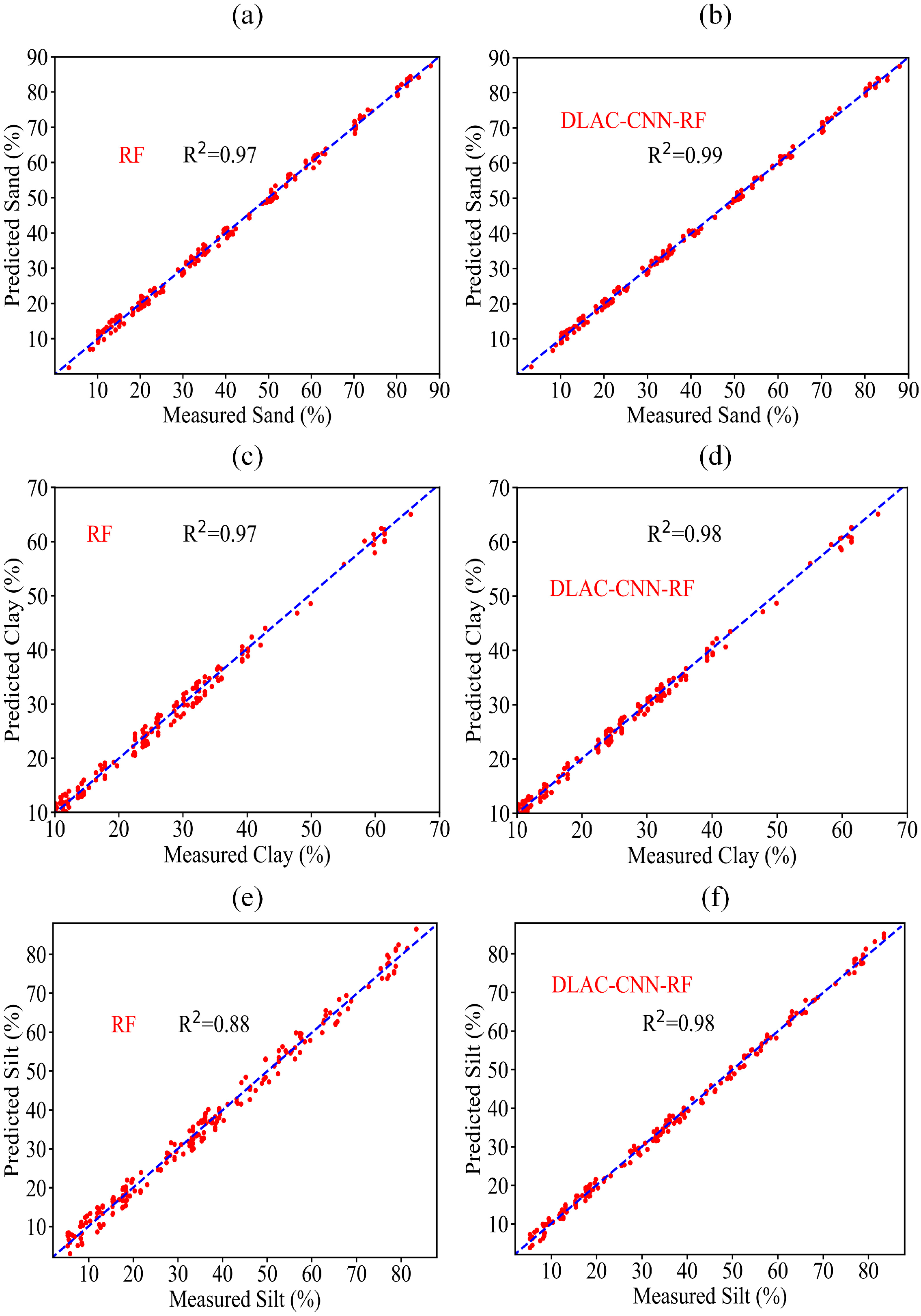
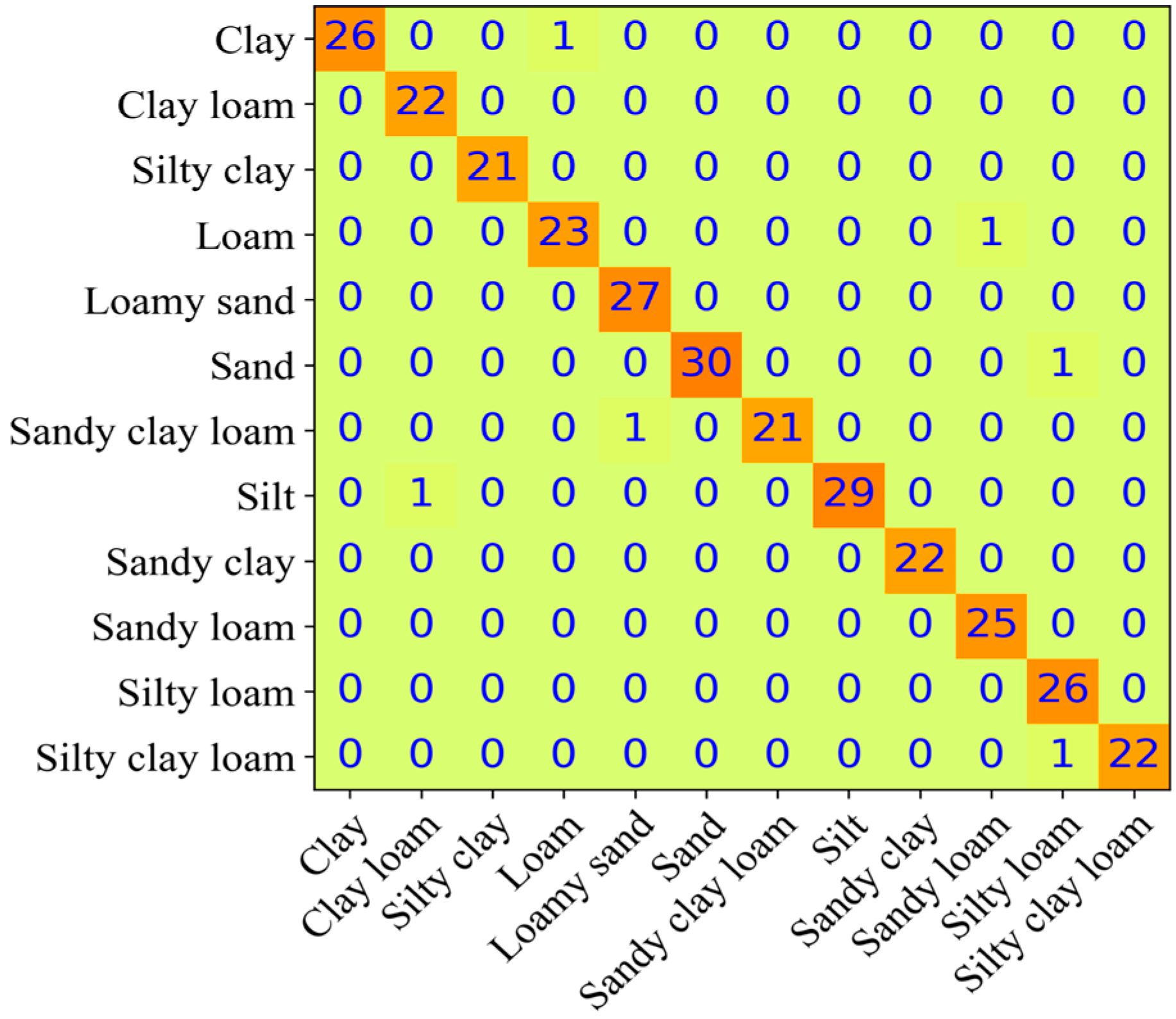
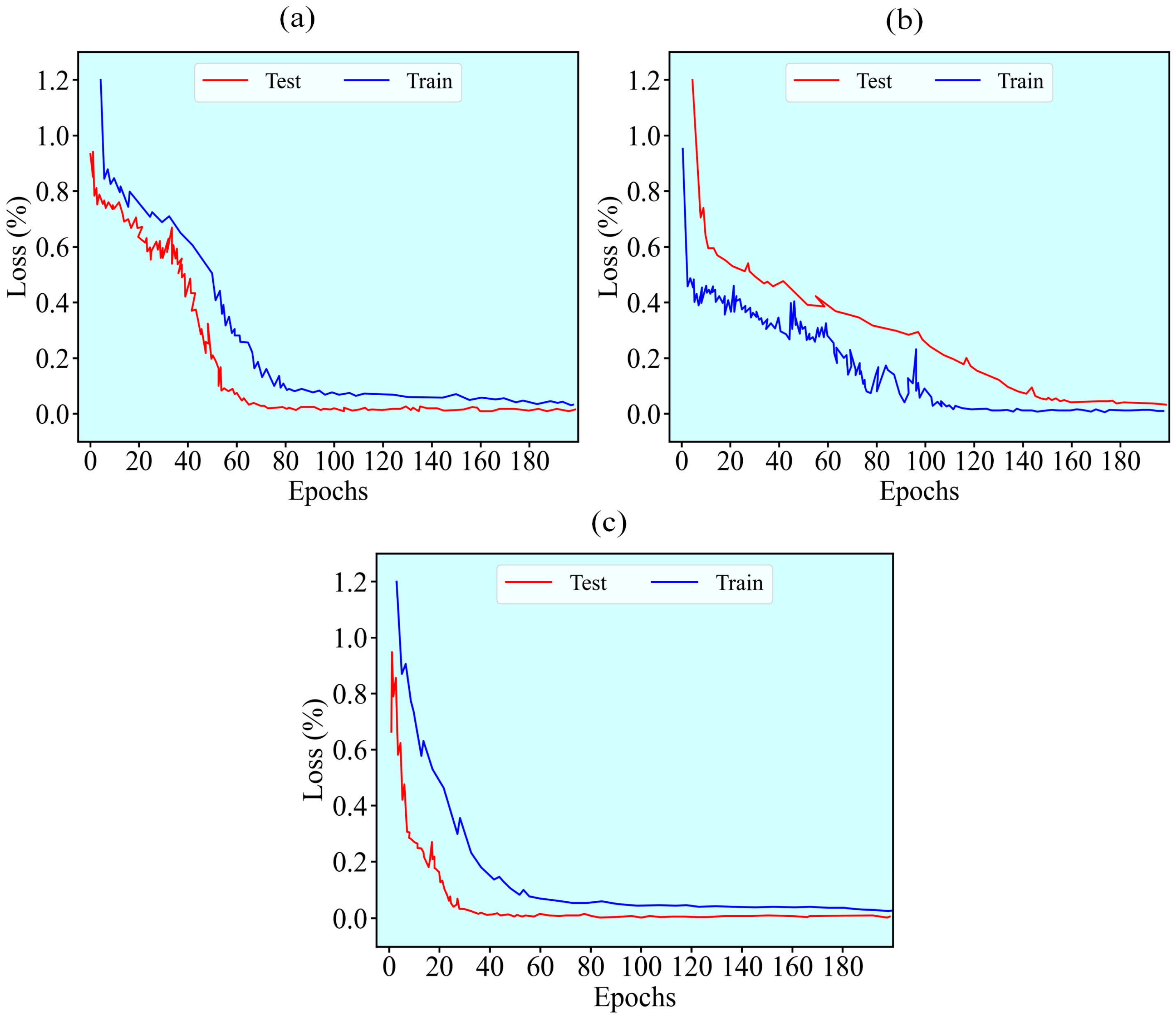
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Phogat, V.K.; Tomar, V.S.; Dahiya, R. Soil physical properties. Soil Sci. Introd. 2015, 135–171. [Google Scholar]
- Rahimi-Ajdadi, F.; Abbaspour-Gilandeh, Y.; Mollazade, K.; Hasanzadeh, R.P.R. Development of a novel machine vision procedure for rapid and non-contact measurement of soil moisture content. Measurement 2018, 121, 179–189. [Google Scholar] [CrossRef]
- Klute, A. Methods of Soil Analysis. Part 1. Physical and Mineralogical Methods; Sssa book series 5; Soil Science Society of America: Madison, WI, USA, 1986. [Google Scholar]
- Robinson, G.W. A new method for the mechanical analysis of soils and other dispersions. J. Agric. Sci. 1922, 12, 306–321. [Google Scholar] [CrossRef] [Green Version]
- Di Stefano, C.; Ferro, V.; Mirabile, S. Comparison between grain-size analyses using laser diffraction and sedimentation methods. Biosyst. Eng. 2010, 106, 205–215. [Google Scholar] [CrossRef]
- Chakraborty, S.; Weindorf, D.C.; Deb, S.; Li, B.; Paul, S.; Choudhury, A.; Ray, D.P. Rapid assessment of regional soil arsenic pollution risk via diffuse reflectance spectroscopy. Geoderma 2017, 289, 72–81. [Google Scholar] [CrossRef]
- Fu, Y.; Taneja, P.; Lin, S.; Ji, W.; Adamchuk, V.; Daggupati, P.; Biswas, A. Predicting soil organic matter from cellular phone images under varying soil moisture. Geoderma 2020, 361, 114020. [Google Scholar] [CrossRef]
- Andrenelli, M.C.; Fiori, V.; Pellegrini, S. Soil particle-size analysis up to 250 μm by x-ray granulometer: Device set-up and regressions for data conversion into pipette-equivalent values. Geoderma 2013, 192, 380–393. [Google Scholar] [CrossRef]
- Fisher, P.; Aumann, C.; Chia, K.; O’Halloran, N.; Chandra, S. Adequacy of laser diffraction for soil particle size analysis. PLoS ONE 2017, 12, e0176510. [Google Scholar] [CrossRef] [Green Version]
- Jaconi, A.; Vos, C.; Don, A. Near infrared spectroscopy as an easy and precise method to estimate soil texture. Geoderma 2019, 337, 906–913. [Google Scholar] [CrossRef]
- Vaz, C.M.P.; de Mendonça Naime, J.; Macedo, Á. Soil particle size fractions determined by gamma-ray attenuation. Soil Sci. 1999, 164, 403–410. [Google Scholar] [CrossRef]
- Vohland, M.; Ludwig, M.; Thiele-Bruhn, S.; Ludwig, B. Determination of soil properties with visible to near-and mid-infrared spectroscopy: Effects of spectral variable selection. Geoderma 2014, 223–225, 88–96. [Google Scholar] [CrossRef]
- El Hourani, M.; Broll, G. Soil protection in floodplains—A review. Land 2021, 10, 149. [Google Scholar] [CrossRef]
- Sofou, A.; Evangelopoulos, G.; Maragos, P. Soil image segmentation and texture analysis: A computer vision approach. IEEE Geosci. Remote Sens. Lett. 2005, 2, 394–398. [Google Scholar] [CrossRef]
- Sudarsan, B.; Ji, W.; Adamchuk, V.; Biswas, A. Characterizing soil particle sizes using wavelet analysis of microscope images. Comput. Electron. Agric. 2018, 148, 217–225. [Google Scholar] [CrossRef]
- Aitkenhead, M.; Coull, M.; Gwatkin, R.; Donnelly, D. Automated soil physical parameter assessment using smartphone and digital camera imagery. J. Imaging 2016, 2, 35. [Google Scholar] [CrossRef] [Green Version]
- Aitkenhead, M.; Cameron, C.; Gaskin, G.; Choisy, B.; Coull, M.; Black, H. Digital rgb photography and visible-range spectroscopy for soil composition analysis. Geoderma 2018, 313, 265–275. [Google Scholar] [CrossRef]
- de Oliveira Morais, P.A.; de Souza, D.M.; de Melo Carvalho, M.T.; Madari, B.E.; de Oliveira, A.E. Predicting soil texture using image analysis. Microchem. J. 2019, 146, 455–463. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Dornik, A.; DrĂGuŢ, L.; Urdea, P. Classification of soil types using geographic object-based image analysis and random forests. Pedosphere 2018, 28, 913–925. [Google Scholar] [CrossRef]
- Fan, R.; Bocus, M.J.; Zhu, Y.; Jiao, J.; Wang, L.; Ma, F.; Cheng, S.; Liu, M. Road crack detection using deep convolutional neural network and adaptive thresholding. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar]
- Vardhana, M.; Arunkumar, N.; Lasrado, S.; Abdulhay, E.; Ramirez-Gonzalez, G. Convolutional neural network for bio-medical image segmentation with hardware acceleration. Cogn. Syst. Res. 2018, 50, 10–14. [Google Scholar] [CrossRef]
- Swetha, R.K.; Bende, P.; Singh, K.; Gorthi, S.; Biswas, A.; Li, B.; Weindorf, D.C.; Chakraborty, S. Predicting soil texture from smartphone-captured digital images and an application. Geoderma 2020, 376, 114562. [Google Scholar] [CrossRef]
- Azadnia, R.; Jahanbakhshi, A.; Rashidi, S. Developing an automated monitoring system for fast and accurate prediction of soil texture using an image-based deep learning network and machine vision system. Measurement 2022, 190, 110669. [Google Scholar] [CrossRef]
- He, R.; Dai, Y.; Lu, J.; Mou, C. Developing ladder network for intelligent evaluation system: Case of remaining useful life prediction for centrifugal pumps. Reliab. Eng. Syst. Saf. 2018, 180, 385–393. [Google Scholar] [CrossRef]
- Gee, G.W.; Or, D. 2.4 particle-size analysis. Methods Soil Anal. Part 4 Phys. Methods 2002, 5, 255–293. [Google Scholar]
- Soil Survey Staff. Soil Taxonomy: A Basic System of Soil Classification for Making and Interpreting Soil Surveys; USDA, Natural Resources Conservation Service: Washington, DC, USA, 1999.
- Qi, L.; Adamchuk, V.; Huang, H.-H.; Leclerc, M.; Jiang, Y.; Biswas, A. Proximal sensing of soil particle sizes using a microscope-based sensor and bag of visual words model. Geoderma 2019, 351, 144–152. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B.; Tranter, G.; Murphy, B.W. Using soil knowledge for the evaluation of mid-infrared diffuse reflectance spectroscopy for predicting soil physical and mechanical properties. Eur. J. Soil Sci. 2008, 59, 960–971. [Google Scholar] [CrossRef]
- Aboutalebi, M.; Allen, L.N.; Torres-Rua, A.F.; McKee, M.; Coopmans, C. Estimation of Soil Moisture at Different Soil Levels Using Machine Learning Techniques and Unmanned Aerial Vehicle (UAV) Multispectral Imagery; SPIE: Bellingham, WA, USA, 2019; pp. 216–226. [Google Scholar]
- Marcu, I.; Suciu, G.; Bălăceanu, C.; Vulpe, A.; Drăgulinescu, A.-M. Arrowhead technology for digitalization and automation solution: Smart cities and smart agriculture. Sensors 2020, 20, 1464. [Google Scholar] [CrossRef] [Green Version]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from uav using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 111599. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Extracted Feature | Model | MAE | RMSE | R2 | |
|---|---|---|---|---|---|
| Sand | Color | RF | 3.67 | 4.44 | 0.95 |
| DLAC-CNN-RF | 3.45 | 3.81 | 0.96 | ||
| Texture | RF | 3.69 | 4.45 | 0.95 | |
| DLAC-CNN-RF | 3.48 | 3.85 | 0.96 | ||
| Particle | RF | 3.74 | 4.53 | 0.94 | |
| DLAC-CNN-RF | 3.49 | 3.86 | 0.96 | ||
| Color + Texture | RF | 3.58 | 4.35 | 0.96 | |
| DLAC-CNN-RF | 3.39 | 3.73 | 0.98 | ||
| Color + Particle | RF | 3.62 | 4.37 | 0.96 | |
| DLAC-CNN-RF | 3.42 | 3.78 | 0.97 | ||
| Particles + Texture | RF | 3.64 | 4.39 | 0.95 | |
| DLAC-CNN-RF | 3.44 | 3.80 | 0.97 | ||
| Color + Particle + Texture | RF | 3.55 | 4.24 | 0.97 | |
| DLAC-CNN-RF | 3.37 | 3.71 | 0.99 | ||
| Silt | Color | RF | 3.81 | 4.46 | 0.79 |
| DLAC-CNN-RF | 3.58 | 3.89 | 0.96 | ||
| Texture | RF | 3.83 | 4.49 | 0.78 | |
| DLAC-CNN-RF | 3.59 | 3.94 | 0.94 | ||
| Particle | RF | 3.89 | 4.57 | 0.73 | |
| DLAC-CNN-RF | 3.61 | 3.96 | 0.94 | ||
| Color + Texture | RF | 3.73 | 4.40 | 0.85 | |
| DLAC-CNN-RF | 3.51 | 3.81 | 0.97 | ||
| Color + Particle | RF | 3.74 | 4.43 | 0.82 | |
| DLAC-CNN-RF | 3.52 | 3.85 | 0.97 | ||
| Particles + Texture | RF | 3.77 | 4.44 | 0.81 | |
| DLAC-CNN-RF | 3.55 | 3.88 | 0.96 | ||
| Color + Particle + Texture | RF | 3.70 | 4.37 | 0.88 | |
| DLAC-CNN-RF | 3.48 | 3.79 | 0.98 | ||
| Clay | Color | RF | 3.68 | 4.68 | 0.93 |
| DLAC-CNN-RF | 3.55 | 3.93 | 0.94 | ||
| Texture | RF | 3.70 | 4.72 | 0.91 | |
| DLAC-CNN-RF | 3.48 | 3.84 | 0.97 | ||
| Particle | RF | 3.74 | 4.75 | 0.90 | |
| DLAC-CNN-RF | 3.49 | 3.85 | 0.96 | ||
| Color + Texture | RF | 3.63 | 4.61 | 0.97 | |
| DLAC-CNN-RF | 3.51 | 3.88 | 0.96 | ||
| Color + Particle | RF | 3.64 | 4.65 | 0.95 | |
| DLAC-CNN-RF | 3.41 | 3.77 | 0.97 | ||
| Particles + Texture | RF | 3.67 | 4.66 | 0.95 | |
| DLAC-CNN-RF | 3.45 | 3.81 | 0.98 | ||
| Color + Particle + Texture | RF | 3.59 | 4.57 | 0.97 | |
| DLAC-CNN-RF | 3.46 | 3.83 | 0.98 |
| Soil Textures | Accuracy | Precision | Sensitivity | Specificity | AUC |
|---|---|---|---|---|---|
| Clay | 99.67% | 100% | 96.3% | 100% | 98.15% |
| Clay loam | 99.67% | 95.65% | 100% | 99.64% | 99.82% |
| Silty loam | 100% | 100% | 100% | 100% | 100% |
| Loam | 99.33% | 95.65% | 95.83% | 99.64% | 97.74% |
| Loamy sand | 99.67% | 96.43% | 100% | 99.63% | 99.82% |
| Sand | 99.67% | 100% | 96.77% | 100% | 98.39% |
| Sandy clay loam | 99.67% | 100% | 95.45% | 100% | 97.73% |
| Silt | 99.67% | 100% | 96.67% | 100% | 98.34% |
| Sandy clay | 100% | 100% | 100% | 100% | 100% |
| Sandy loam | 99.67% | 96.15% | 100% | 99.64% | 99.82% |
| Silty loam | 99.33% | 92.86% | 100% | 99.28% | 99.64% |
| Silty clay loam | 99.67% | 100% | 95.65% | 100% | 97.83% |
| average | 99.67% | 98.06% | 98.06% | 99.82% | 98.94% |
| Model | Soil Types | Feature | Test | |
|---|---|---|---|---|
| R2 | RMSE | |||
| KNN | Clay | Color + particle + texture | 0.95 | 4.59 |
| Sand | Color + particle + texture | 0.85 | 4.62 | |
| Silt | Color + particle + texture | 0.94 | 4.60 | |
| VGG16-RF | Clay | Color + particle + texture | 0.85 | 4.23 |
| Sand | Color + particle + texture | 0.93 | 3.85 | |
| Silt | Color + particle + texture | 0.97 | 3.95 | |
| Proposed DLAC-CNN-RF model | Clay | Color + particle + texture | 0.99 | 3.76 |
| Sand | Color + particle + texture | 0.99 | 3.71 | |
| Silt | Color + particle + texture | 0.98 | 3.79 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Feng, W.; Xiao, J.; Liu, X.; Pan, S.; Liang, Z. Rapid and Accurate Prediction of Soil Texture Using an Image-Based Deep Learning Autoencoder Convolutional Neural Network Random Forest (DLAC-CNN-RF) Algorithm. Agronomy 2022, 12, 3063. https://doi.org/10.3390/agronomy12123063
Zhao Z, Feng W, Xiao J, Liu X, Pan S, Liang Z. Rapid and Accurate Prediction of Soil Texture Using an Image-Based Deep Learning Autoencoder Convolutional Neural Network Random Forest (DLAC-CNN-RF) Algorithm. Agronomy. 2022; 12(12):3063. https://doi.org/10.3390/agronomy12123063
Chicago/Turabian StyleZhao, Zhuan, Wenkang Feng, Jinrui Xiao, Xiaochu Liu, Shusheng Pan, and Zhongwei Liang. 2022. "Rapid and Accurate Prediction of Soil Texture Using an Image-Based Deep Learning Autoencoder Convolutional Neural Network Random Forest (DLAC-CNN-RF) Algorithm" Agronomy 12, no. 12: 3063. https://doi.org/10.3390/agronomy12123063