
An Improved Lightweight Network for Real-Time Detection of Apple Leaf Diseases in Natural Scenes

 ,
,
Abstract
:1. Introduction
- A multi-scene apple leaf disease dataset (MSALDD) is established. The MSALDD can meet the needs of apple disease detection, which remains a challenge in complex backgrounds and under different capture conditions.
- The proposed method improves the feature learning capability of the network by using the designed asymmetric ShuffleBlock, reducing the interference of other factors in disease feature extraction using the proposed CSP-SA module. Meanwhile, BSConv and CIoU loss are used to further improve the performance.
- Experimental results show that the proposed YOLOX-ASSANano achieved a mAP of 91.08% on MSALDD with 0.83 MB parameters. The proposed model achieves a good trade-off between accuracy and parameters to efficiently detect three common diseases of apple leaves in natural scenes.
2. Materials and Methods
2.1. Dataset
2.1.1. Data Acquisition
2.1.2. Data Processing
2.2. Methods of Apple Diseased Leaf Detection
2.2.1. Network Architecture
2.2.2. Asymmetric Shuffleblock
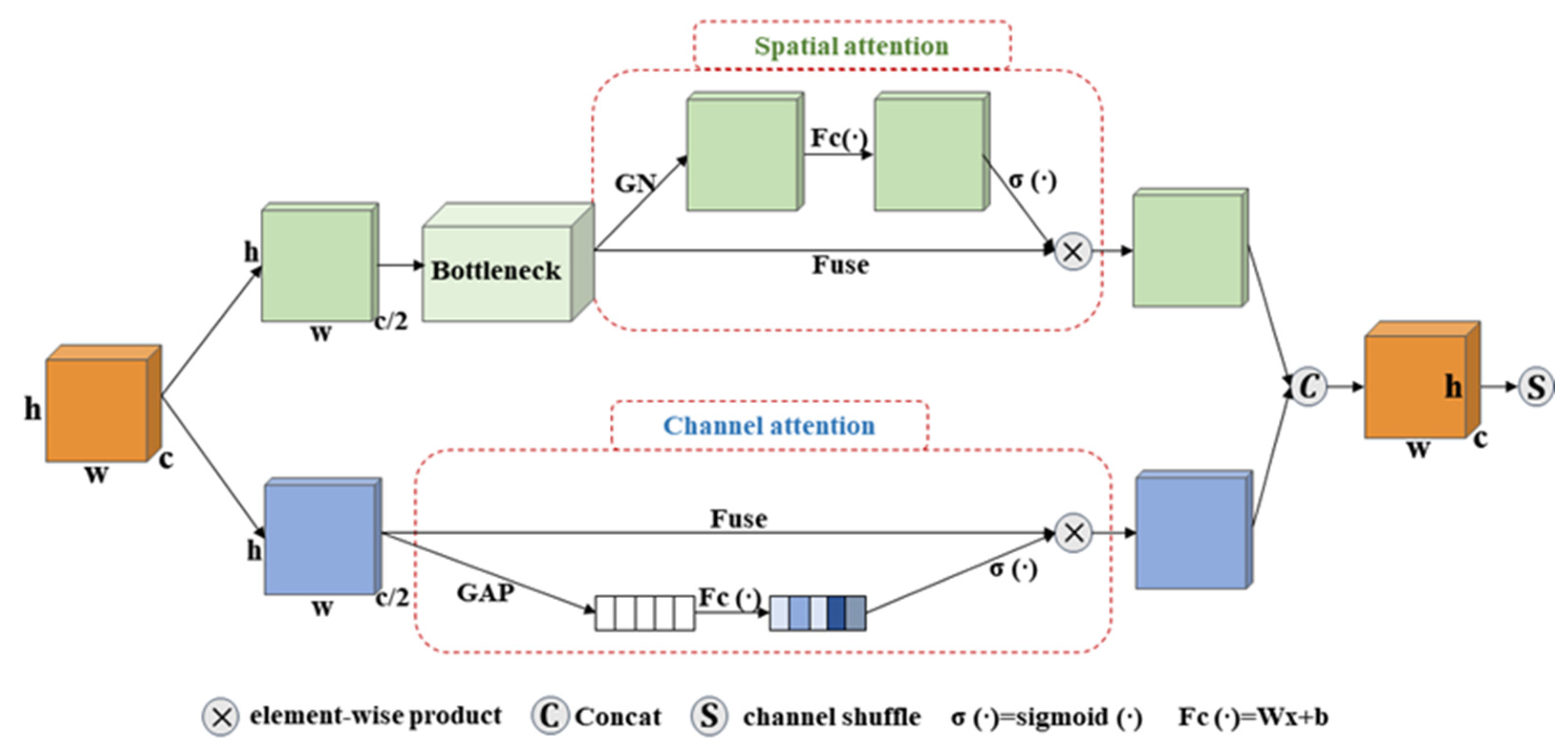
2.2.3. Cross Stage Partial Module with Shuffle Attention
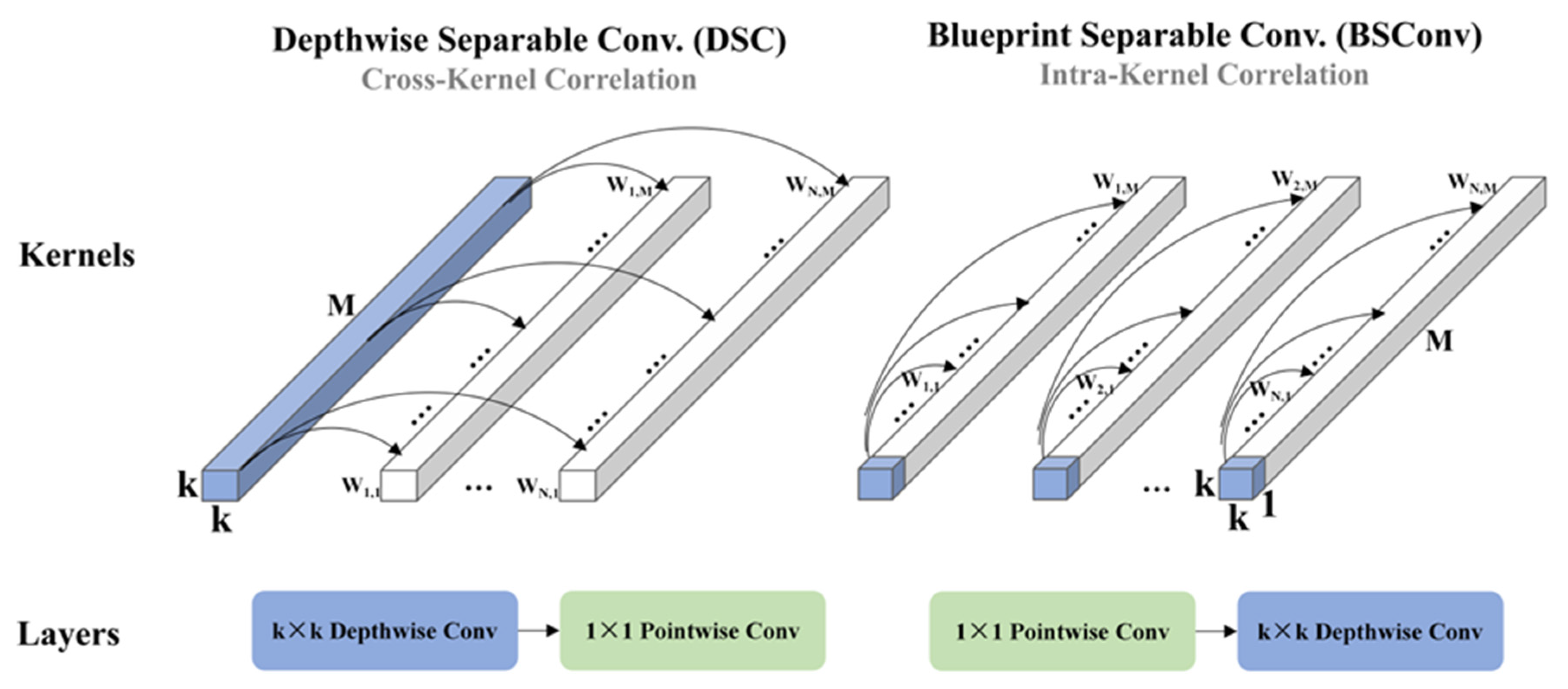
2.2.4. Blueprint-Separable Convolution
2.2.5. Complete Intersection-Over-Union Loss
2.3. Implementation Details
2.3.1. Experimental Setup
2.3.2. Evaluation Metrics
3. Results and Discussion
3.1. Comparison Results on MSALDD
3.2. Ablation Study on the Model’s Performance
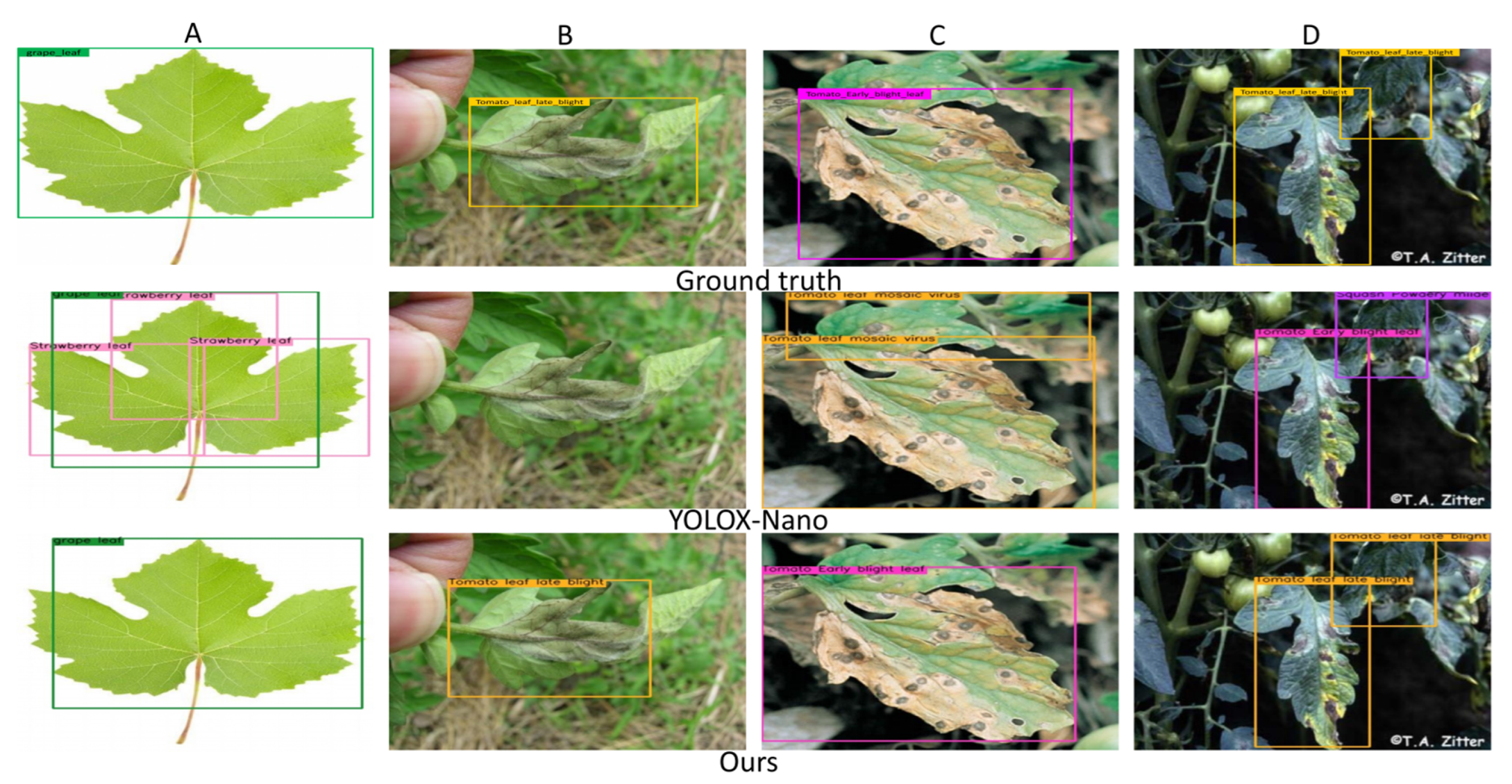
3.3. Comparison Experiments on PlantDoc
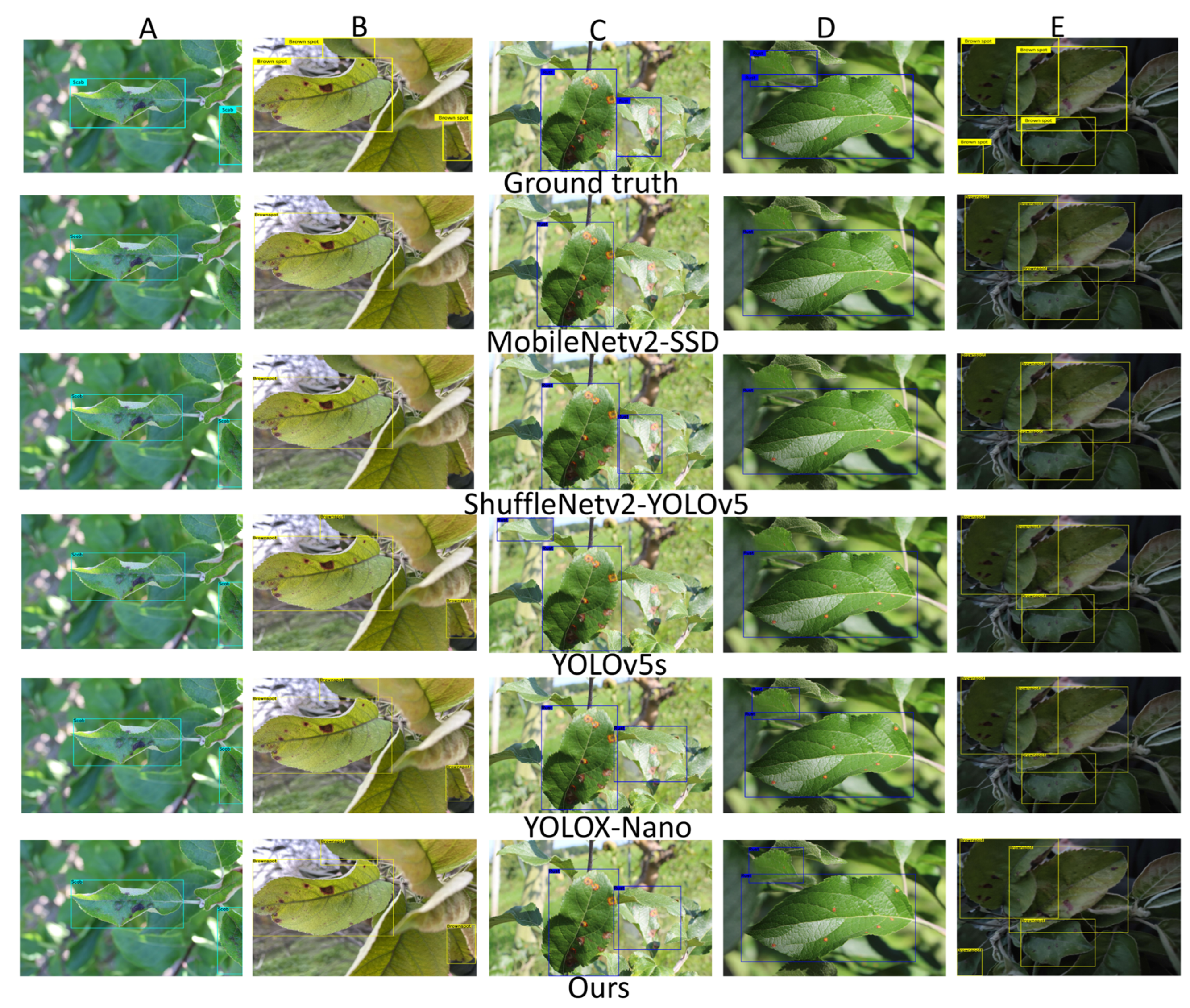
3.4. Visualization and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Snyder, F.; Ni, L. Chinese apples and the emerging world food trade order: Food safety, international trade, and regulatory collaboration between China and the European Union. Chin. J. Comp. Law 2017, 5, 253–307. [Google Scholar] [CrossRef]
- Khan, A.I.; Quadri, S.; Banday, S. Deep learning for apple diseases: Classification and identification. Int. J. Comput. Intell. Stud. 2021, 10, 1–12. [Google Scholar]
- Bhat, A.; Wani, M.; Bhat, G.; Qadir, A.; Qureshi, I.; Ganaie, S.A. Health cost and economic loss due to excessive pesticide use in apple growing region of Jammu and Kashmir. J. Appl. Hortic. 2020, 22, 220–225. [Google Scholar]
- Abade, A.; Ferreira, P.A.; de Barros Vidal, F. Plant diseases recognition on images using convolutional neural networks: A systematic review. Comput. Electron. Agric. 2021, 185, 106125. [Google Scholar] [CrossRef]
- Baranwal, S.; Khandelwal, S.; Arora, A. Deep learning convolutional neural network for apple leaves disease detection. In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Jaipur, India, 26–28 February 2019. [Google Scholar]
- Sardogan, M.; Yunus, Ö.; Tuncer, A. Detection of Apple Leaf Diseases Using Faster R-CNN. Düzce Üniversitesi Bilim Ve Teknol. Derg. 2020, 8, 1110–1117. [Google Scholar]
- Bansal, P.; Kumar, R.; Kumar, S. Disease detection in Apple leaves using deep convolutional neural network. Agriculture 2021, 11, 617. [Google Scholar] [CrossRef]
- Xie, Q.; Luong, M.T.; Hovy, E.; Le, Q.V. Self-training with noisy student improves imagenet classification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10687–10698. [Google Scholar]
- Mukherjee, S.; Kumar, P.; Saini, R.; Roy, P.P.; Dogra, D.P.; Kim, B.G. Plant disease identification using deep neural networks. J. Multimed. Inf. Syst. 2017, 4, 233–238. [Google Scholar]
- Adeel, A.; Khan, M.A.; Sharif, M.; Azam, F.; Shah, J.H.; Umer, T.; Wan, S. Diagnosis and recognition of grape leaf diseases: An automated system based on a novel saliency approach and canonical correlation analysis based multiple features fusion. Sustain. Comput. Inform. Syst. 2019, 24, 100349. [Google Scholar] [CrossRef]
- Fu, L.; Feng, Y.; Wu, J.; Liu, Z.; Gao, F.; Majeed, Y.; Al-Mallahi, A.; Zhang, Q.; Li, R.; Cui, Y. Fast and accurate detection of kiwifruit in orchard using improved YOLOv3-tiny model. Precis. Agric. 2021, 22, 754–776. [Google Scholar] [CrossRef]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. Shufflenet: An extremely efficient convolutional neural network for mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6848–6856. [Google Scholar]
- Lee, H.; Kim, H.E.; Nam, H. Srm: A style-based recalibration module for convolutional neural networks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 1854–1862. [Google Scholar]
- Zhao, H.; Zhang, Y.; Liu, S.; Shi, J.; Loy, C.C.; Lin, D.; Jia, J. Psanet: Point-wise spatial attention network for scene parsing. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 267–283. [Google Scholar]
- Li, X.; Zhong, Z.; Wu, J.; Yang, Y.; Lin, Z.; Liu, H. Expectation-maximization attention networks for semantic segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 9167–9176. [Google Scholar]
- Zhu, Z.; Xu, M.; Bai, S.; Huang, T.; Bai, X. Asymmetric non-local neural networks for semantic segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 593–602. [Google Scholar]
- Cao, Y.; Xu, J.; Lin, S.; Wei, F.; Hu, H. Gcnet: Non-local networks meet squeeze-excitation networks and beyond. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, Seoul, Korea, 27–28 October 2019. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Yang, H.; Shen, Z.; Zhao, Y. AsymmNet: Towards ultralight convolution neural networks using asymmetrical bottlenecks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 2339–2348. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. Shufflenet v2: Practical guidelines for efficient cnn architecture design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar]
- Haase, D.; Amthor, M. Rethinking depthwise separable convolutions: How intra-kernel correlations lead to improved MobileNets. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 14600–14609. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Thapa, R.; Zhang, K.; Snavely, N.; Belongie, S.; Khan, A. The Plant Pathology Challenge 2020 data set to classify foliar disease of apples. Appl. Plant Sci. 2020, 8, e11390. [Google Scholar] [CrossRef] [PubMed]
- Tzutalin. Labelimg. 2016. Available online: https://github.com/tzutalin/labelimg (accessed on 9 June 2021).
- Buda, M.; Maki, A.; Mazurowski, M.A. A systematic study of the class imbalance problem in convolutional neural networks. Neural Netw. 2018, 106, 249–259. [Google Scholar] [CrossRef] [PubMed]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.109342020. [Google Scholar]
- Jocher, G. Yolov5. 2021. Available online: https://github.com/ultralytics/yolov5 (accessed on 3 October 2021).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Yu, J.; Jiang, Y.; Wang, Z.; Cao, Z.; Huang, T. Unitbox: An advanced object detection network. In Proceedings of the 24th ACM International Conference on Multimedia, Amsterdam, The Netherlands, 15–19 October 2016; pp. 516–520. [Google Scholar]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. Supplementary material for ‘ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 13–19. [Google Scholar]
- Li, X.; Hu, X.; Yang, J. Spatial group-wise enhance: Improving semantic feature learning in convolutional networks. arXiv 2019, arXiv:1905.09646. [Google Scholar]
- Zhang, Q.L.; Yang, Y.B. Sa-net: Shuffle attention for deep convolutional neural networks. In Proceedings of the 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 2235–2239. [Google Scholar]
- Wu, Y.; He, K. Group normalization. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Wang, C.Y.; Liao, H.Y.M.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 390–391. [Google Scholar]
- Guo, J.; Li, Y.; Lin, W.; Chen, Y.; Li, J. Network decoupling: From regular to depthwise separable convolutions. arXiv 2018, arXiv:1808.05517. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Singh, D.; Jain, N.; Jain, P.; Kayal, P.; Kumawat, S.; Batra, N. PlantDoc: A dataset for visual plant disease detection. In Proceedings of the 7th ACM IKDD CoDS and 25th COMAD, Hyderabad, India, 5–7 January 2020; pp. 249–253. [Google Scholar]
- Wang, D. Crop disease classification with transfer learning and residual networks. Trans. Chin. Soc. Agric. Eng. 2021, 37, 199–207. [Google Scholar]
- Shill, A.; Rahman, M.A. Plant Disease Detection Based on YOLOv3 and YOLOv4. In Proceedings of the 2021 International Conference on Automation, Control and Mechatronics for Industry 4.0 (ACMI), Rajshahi, Bangladesh, 8–9 July 2021; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Leaf Rust | Leaf Scab | Leaf Blotch | Sum | |
|---|---|---|---|---|
| Train | 1751 | 1412 | 1549 | 4712 |
| Test | 664 | 452 | 440 | 1556 |
| Name | Output Size | Attention | Concat |
|---|---|---|---|
| Focus | 208 × 208 × 16 | ||
| DSC | 104 × 104 × 32 | ||
| Conv | 104 × 104 × 16 | ||
| Asymmetric ShuffleBlock | 104 × 104 × 16 | spatial | |
| Conv | 104 × 104 × 16 | channel | |
| Conv | 104 × 104 × 32 | (−1,−2) | |
| DSC | 52 × 52 × 64 | ||
| Conv | 52 × 52 × 32 | ||
| Asymmetric ShuffleBlock | 52 × 52 × 32 | spatial | |
| Conv | 52 × 52 × 32 | channel | |
| Conv | 52 × 52 × 64 | (−1,−2) | |
| DSC | 26 × 26 × 128 | ||
| Conv | 26 × 26 × 64 | ||
| Asymmetric ShuffleBlock | 26 × 26 × 64 | spatial | |
| Conv | 26 × 26 × 64 | channel | |
| Conv | 26 × 26 × 128 | (−1,−2) | |
| DSC | 13 × 13 × 256 | ||
| SPP | 13 × 13 × 256 | ||
| Conv | 13 × 13 × 128 | ||
| Asymmetric ShuffleBlock | 13 × 13 × 128 | spatial | |
| Conv | 13 × 13 × 128 | channel | |
| Conv | 13 × 13 × 256 | (−1,−2) |
| Configuration Item | Value |
|---|---|
| CPU | Inter Xeon Plantinum 8160T @2.1 GHz |
| GPU | NVIDIA TITAN RTX 24 G |
| Memory | 128 G |
| Operating system | Ubuntu 18.04.6 LTS (64-bit) |
| Deep learning framework | Pytorch |
| Models | Precision (%) | Recall (%) | mAP (%) | Parameters (MB) | FPS |
|---|---|---|---|---|---|
| MobileNetv2-SSD | 64.47 | 57.38 | 64.04 | 11.78 | 62 |
| ShuffleNetv2-YOLOv5 | 85.19 | 80.01 | 86.97 | 1.47 | 142 |
| YOLOv5s | 89.59 | 82.68 | 90.68 | 6.74 | 120 |
| YOLOX-Nano | 89.15 | 79.05 | 88.41 | 0.86 | 128 |
| Ours | 89.75 | 83.63 | 91.08 | 0.83 | 122 |
| p | mAP (%) | Parameters (MB) | |
|---|---|---|---|
| 1 | 87.57 | 0.81 | |
| +Asymmetric ShuffleBlock | 2 | 89.06 | 0.83 |
| 3 | 89.00 | 0.84 | |
| 4 | 89.04 | 0.86 |
| mAP (%) | FPS | |
|---|---|---|
| IoU loss | 90.47 | 136 |
| CIoU loss | 91.08 | 122 |
| DIoU loss | 90.86 | 130 |
| GIoU loss | 90.33 | 133 |
| Asymmetric Shuffleblock | CSP-SA | BSConv | CIoU | mAP (%) | Parameters (MB) |
|---|---|---|---|---|---|
| 88.41 | 0.856 | ||||
| ✓ | 89.06 | 0.826 | |||
| ✓ | ✓ | 89.84 | 0.827 | ||
| ✓ | ✓ | ✓ | 90.47 | 0.829 | |
| ✓ | ✓ | ✓ | ✓ | 91.08 | 0.829 |
| Models | mAP (%) | F1 (%) |
|---|---|---|
| YOLOX-Nano | 54.82 | 50.35 |
| TL-SE-ResNeXt-101 | 47.37 | 41.91 |
| M_YOLOv4 | 55.45 | 56.00 |
| Ours (YOLOX-ASSANano) | 58.86 | 56.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Qiao, Y.; Li, J.; Zhang, H.; Zhang, M.; Wang, M. An Improved Lightweight Network for Real-Time Detection of Apple Leaf Diseases in Natural Scenes. Agronomy 2022, 12, 2363. https://doi.org/10.3390/agronomy12102363
Liu S, Qiao Y, Li J, Zhang H, Zhang M, Wang M. An Improved Lightweight Network for Real-Time Detection of Apple Leaf Diseases in Natural Scenes. Agronomy. 2022; 12(10):2363. https://doi.org/10.3390/agronomy12102363
Chicago/Turabian StyleLiu, Sha, Yongliang Qiao, Jiawei Li, Haotian Zhang, Mingke Zhang, and Meili Wang. 2022. "An Improved Lightweight Network for Real-Time Detection of Apple Leaf Diseases in Natural Scenes" Agronomy 12, no. 10: 2363. https://doi.org/10.3390/agronomy12102363