Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Instruments and Equipment
2.2. Experimental Design
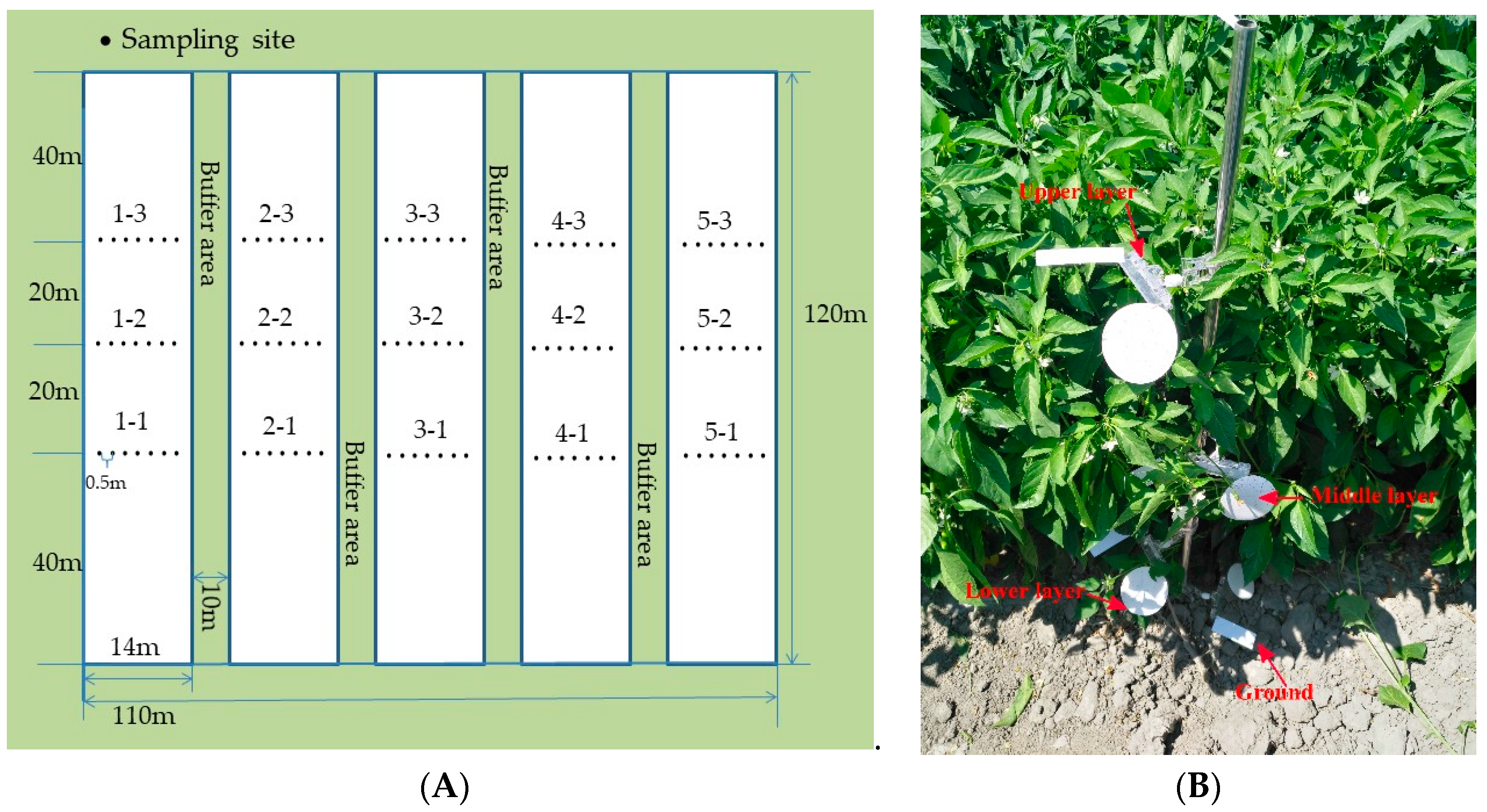
2.2.1. Field Plots
2.2.2. Treatment
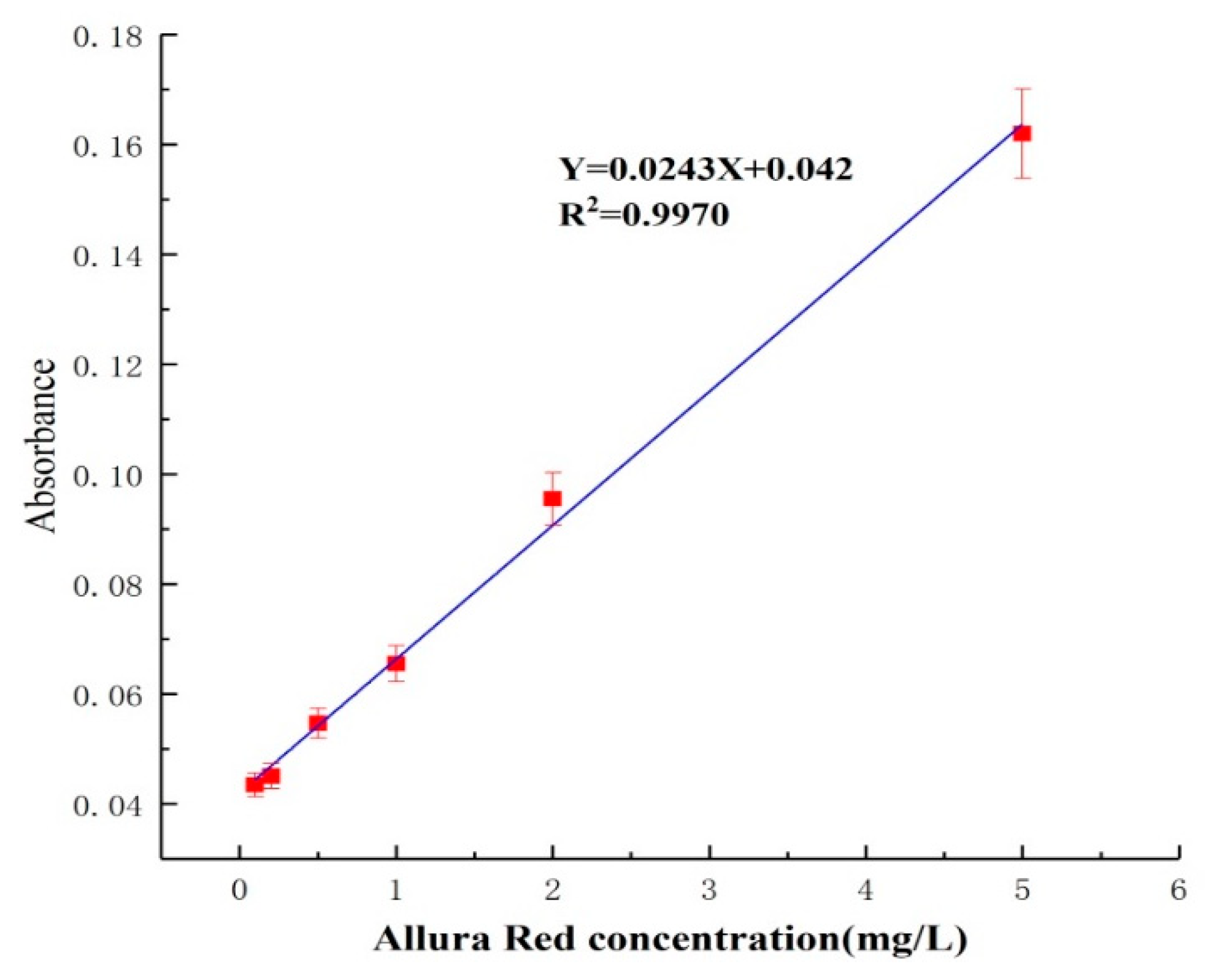
2.2.3. Droplet Distribution
2.2.4. Control efficacy
2.3. Data Statistics and Processing
3. Results and Discussion
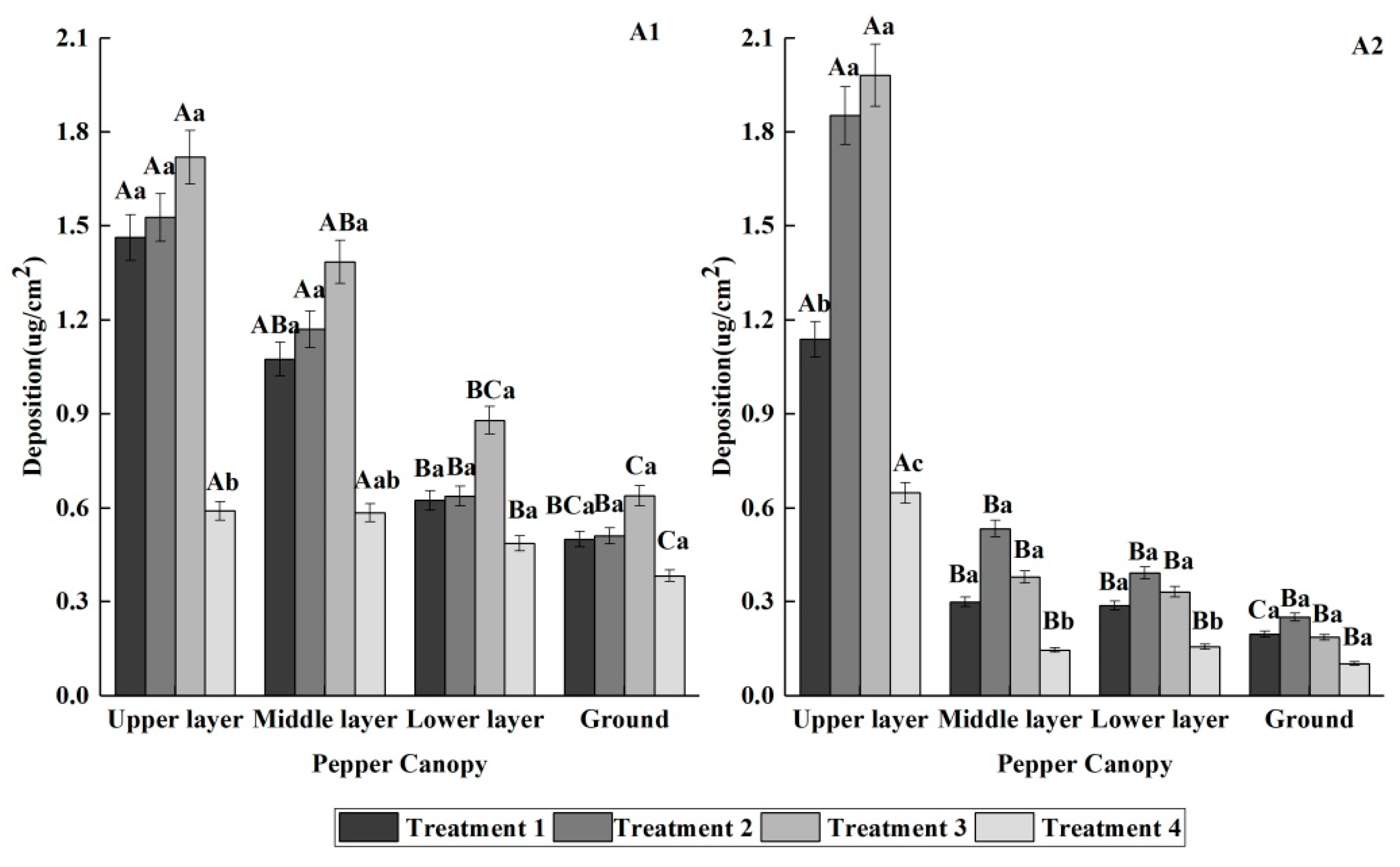
3.1. Droplet Deposition in Processing Peppers
3.1.1. Droplet Coverage
3.1.2. Droplet Density
3.1.3. The Uniformity of the Deposition
3.1.4. Droplet Penetrability
3.2. Control of the P. capsici and the Aphids
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Howard, L.R.; Talcott, S.T.; Brenes, C.H.; Villalon, B. Changes in phytochemical and antioxidant activity of selected pepper cultivars (Capsicum species) as influenced by maturity. J. Agric. Food Chem. 2000, 48, 1713–1720. [Google Scholar] [CrossRef] [PubMed]
- Song, W.S.; Yuan, F.N.; Zhang, X.G. The status quo and development trend of Dried-Fruit-Processing hot pepper industry in Xinjiang. Pepper Mag. 2010, 3, 5–8. (In Chinese) [Google Scholar]
- Wu, Y.T.; Wu, Y.; Du, M.Y.; Cheng, F.F.; Wang, L.Y.; Yin, N.; Liu, W.B. Research status and development trend of chili sauce industry in Xinjiang. China Brewing 2019, 38, 1–4. (In Chinese) [Google Scholar]
- Ge, J.F.; Yan, T.; Ouyang, W.; Tian, Z. The current situation and Development Countermeasures of pepper industry in Xinjiang. J. China Capsicum 2010, 8, 8–10, 16. (In Chinese) [Google Scholar]
- Zhao, Z.X.; Qiao, L.F.; Li, Z.W. Thoughts and Countermeasures of developing capsicum characteristic industry in Xinjiang. Xinjiang Agric. Sci. Technol. 2012, 3, 4–5. (In Chinese) [Google Scholar]
- Fang, X.C.; Qu, H.L.; Zhao, S.F.; Guo, K.F.; Ma, M. Pathogen Identification of Processing Chili Pepper Root Rot Disease in Xinjiang. North. Hortic. 2016, 15, 108–112. (In Chinese) [Google Scholar]
- Zhang, Y.L.; Jia, Q.L.; Li, D.W.; Wang, J.E.; Yin, Y.X.; Gong, Z.H. Characteristic of the Pepper CaRGA2 Gene in Defense Responses against Phytophthora capsici Leonian. Int. J. Mol. Sci. 2013, 14, 8985–9004. [Google Scholar] [CrossRef] [Green Version]
- Hausbeck, M.K.; Lamour, K.H. Phytophthora capsici on vegetable crops: Research progress and management challenges. Plant Dis. 2004, 88, 1292–1303. [Google Scholar] [CrossRef] [Green Version]
- Simón, A.; García, C.; Pascual, F.; Ruiz, L.; Janssen, D. The Influence of Crop Habitat and Control Strategies on Pepper Viruses in Andalusia (Spain). Horticulturae 2016, 2, 15. [Google Scholar] [CrossRef] [Green Version]
- He, Y.M.; Liu, K.K.; Zhang, H.X.; Cheng, G.X.; Ali, M.; Ul Haq, S.; Wei, A.M.; Gong, Z.H. Contribution of CaBPM4, a BTB Domain–Containing Gene, to the Response of Pepper to Phytophthora capsici Infection and Abiotic Stresses. Agronomy 2019, 9, 417. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Fan, Y.; Wang, T.; Zhang, C.; Qiu, Z.; He, Y. Automatic Segmentation and Counting of Aphid Nymphs on Leaves Using Convolutional Neural Networks. Agronomy 2018, 8, 129. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.L.; Zhang, S.J.; Zhang Sun, D.T. Investigation on aphid species of Capsicum annuum. J. Biol. 2003, 20, 22–24. (In Chinese) [Google Scholar]
- Xiao, Q.G.; Xin, F.; Lou, Z.X.; Zhou, T.T.; Wang, G.B.; Han, X.Q.; Lan, Y.B.; Fu, W. Effect of Aviation Spray Adjuvants on Defoliant Droplet Deposition and Cotton Defoliation Efficacy Sprayed by Unmanned Aerial Vehicles. Agronomy 2019, 9, 217. [Google Scholar] [CrossRef] [Green Version]
- He, X.K.; Jane, B.; Andreas, H.; Jan, L. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Yuan, H.Z.; Xue, X.Y.; Yan, X.J.; Qin, W.C.; Kong, X.; Zhou, Y.Y.; Wang, M.; Gao, S.C. Applications and prospects in the unmanned aerial system for low-altitude and low-volume spray in crop protection. Plant Prot. 2018, 44, 152–158. (In Chinese) [Google Scholar]
- Wang, G.B.; Lan, Y.B.; Qi, X.X.; Chen, P.C.; Hewitt, A.J.; Han, Y.X. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Wang, J.; Lan, Y.B.; Zhang, H.H.; Zhang, Y.L.; Wen, S.; Yao, W.X.; Deng, J.J. Drift and deposition of pesticide applied by UAV on pineapple plants under different meteorological conditions. Int. J. Agric. Biol. Eng. 2018, 11, 5–12. [Google Scholar] [CrossRef] [Green Version]
- Lou, Z.X.; Xin, F.; Han, X.Q.; Lan, Y.B.; Duan, T.Z.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Xin, F.; Zhao, J.; Zhou, Y.T.; Wang, G.B.; Han, X.Q.; Fu, W.; Deng, J.Z.; Lan, Y.B. Effects of Dosage and Spraying Volume on Cotton Defoliants Efficacy: A Case Study Based on Application of Unmanned Aerial Vehicles. Agronomy 2018, 8, 85. [Google Scholar] [CrossRef] [Green Version]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Zhu, H.P.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Berger-Neto, A.; Jaccoud-Filho, D.S.; Wutzki, C.R. Effect of spray droplet size, spray volume and fungicide on the control of white mold in soybeans. Corp Prot. 2017, 92, 190–197. [Google Scholar] [CrossRef]
- Massinon, M.; De Cock, N.; Forster, W.A.; Nairn, J.J.; McCue, S.W.; Zabkiewicz, J.A.; Lebeau, F. Spray droplet impaction outcomes for different plant species and spray formulations. Crop Prot. 2017, 99, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.L.; He, X.K.; Wang, X.N. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle. Trans. CSAE 2016, 32, 54–61. (In Chinese) [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.Q.; Li, X.Q.; Meng, F.; Lan, B. Establishment of a resistance-identification method on asparagus stem blight and evaluation of Asparagus officinalis germplasms. Acta Phytopath. Sin. 2012, 42, 649–654. (In Chinese) [Google Scholar]
- Dai, Y.L.; Gan, L.; Ruan, H.C.; Shi, N.N.; Du, Y.X.; Liao, L.; Wei, Z.X.; Teng, Z.Y.; Chen, F.R.; Yang, X.J. Sensitivity of Cochliobolus heterostrophus to three demethylation inhibitor fungicides, propiconazole, diniconazole and prochloraz, and their efficacy against southern corn leaf blight in Fujian Province, China. Eur. J. Plant Pathol. 2018, 152, 447–459. [Google Scholar]
- Meng, Y.H.; Song, J.L.; Lan, Y.B.; Mei, G.Y.; Liang, Z.J.; Han, Y.X. Harvest aids efficacy applied by unmanned aerial vehicles on cotton crop. Ind. Crops Prod. 2019, 140, 111645. [Google Scholar] [CrossRef]
- Zhu, H.; Dorner, J.W.; Rowland, D.L.; Derksen, R.C.; Ozkan, H.E. Spray penetration into peanut canopies with hydraulic nozzle tips. Biosyst. Eng. 2004, 87, 275–283. [Google Scholar] [CrossRef]
- Wang, G.B.; Lan, Y.B.; Yuan, H.Z.; Qi, H.X.; Chen, P.C.; Ouyang, F.; Han, Y.X. Comparison of Spray Deposition, Control Efficacy on Wheat Aphids and Working Efficiency in the Wheat Field of the Unmanned Aerial Vehicle with Boom Sprayer and Two Conventional Knapsack Sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.L.; Song, J.L.; He, X.K.; Song, L.; Wang, X.N.; Wang, C.L.; Wang, Z.C.; Ling, Y. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar]
- Chen, S.D.; Lan, Y.B.; Li, J.Y.; Zhou, Z.Y.; Liu, A.M.; Mao, Y.D. Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying. Int. J. Agric. Biol. Eng. 2017, 10, 67–77. [Google Scholar]
- Yuan, H.Z.; Wang, G.B. Effects of droplet size and deposition density on field efficacy of pesticides. Plant Prot. 2015, 41, 9–16. (In Chinese) [Google Scholar]
- Moritz, K. Effect of droplet size and carrier volume on performance of foliage-applied herbicides. Crop Prot. 1994, 13, 163–178. [Google Scholar]
- Derksen, R.C.; Zhu, H.; Ozkan, H.E.; Hammond, R.B.; Dorrance, A.E.; Spongberg, A.L. Determining the influence of spray quality, nozzle type volume, and air-assisted application strategies on deposition of pesticides in soybean canopy. Trans. ASABE 2008, 51, 1529–1537. [Google Scholar] [CrossRef] [Green Version]
- Civil Aviation Industry Standards of the People’s Republic of China: Quality Indexes of Agricultural Aviation Operation: Part 1: Spraying Operation MH/T 1002.1-2016 [S]; Standards Press of China: Beijing, China. (In Chinese)
- Hislop, E.C.; Western, N.M.; Butler, R. Experimental air-assisted spraying of a maturing cereal crop under controlled conditions. Crop Prot. 1995, 14, 19–26. [Google Scholar] [CrossRef]
- Ebert, T.A.; Taylor, R.A.J.; Downer, R.A.; Hall, F.R. Deposit structure and efficacy of pesticide application. 2: Trichoplusia ni control on cabbage with fipronil. Pestic. Sci. 1999, 55, 793–798. [Google Scholar] [CrossRef]
- Ebert, T.A.; Taylor, R.A.J.; Downer, R.A.; Hall, F.R. Deposit structure and efficacy of pesticide application. 1: Interactions between deposit size, toxicant concentration and deposit number. Pestic. Sci. 1999, 55, 783–792. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Treatment | Field Recommendation Times | 26 June 2019 | 18 July 2019 | Spray Volume (L/ha) | Sprayer |
|---|---|---|---|---|---|
| 72% Cymoxanil•Mancozeb (a. i. g/ha) | 20% Flonicamid (a. i. g/ha) | ||||
| 1 | 1 | 540 | 37.5 | 15 | UAV |
| 2 | 1/2 | 270 | 18.75 | 15 | |
| 3 | 1/3 | 180 | 12.5 | 15 | |
| 4 | 1 | 540 | 37.5 | 300 | EAP |
| 5 | 0 | - | - | 0 | - |
| Spraying Date | Canopy | Treatment | Droplet Size | ||
|---|---|---|---|---|---|
| Dv10 | Dv50 | Dv90 | |||
| 26 June 2019 | Upper layer | 1 | 163.6 ± 13.7b | 282.7 ± 31.1b | 427.3 ± 59.0b |
| 2 | 160.1 ± 23.0b | 300.4 ± 53.1b | 491.2 ± 69.6b | ||
| 3 | 163.1 ± 32.8b | 295.0 ± 64.0b | 493.3 ± 146.0b | ||
| 4 | 546.1 ± 232.5a | 1123.1 ± 417.6a | 1866.3 ± 710.1a | ||
| Middle layer | 1 | 166.0 ± 23.0b | 271.1 ± 29.6b | 407.7 ± 55.1b | |
| 2 | 158.7 ± 22.6b | 272.9 ± 41.3b | 467.8 ± 112.6b | ||
| 3 | 153.5 ± 28.9b | 265.3 ± 50.7b | 418.6 ± 88.9b | ||
| 4 | 391.5 ± 123.1a | 829.1 ± 188.6a | 1302.6 ± 265.7a | ||
| Lower layer | 1 | 160.6 ± 21.0c | 257.4 ± 39.2b | 368.8 ± 79.1bc | |
| 2 | 156.1 ± 20.6bc | 259.7 ± 31.1b | 449.5 ± 125.1b | ||
| 3 | 144.1 ± 15.6b | 258.3 ± 40.5b | 398.5 ± 67.0c | ||
| 4 | 312.9 ± 88.9a | 726.3 ± 185.0a | 1131.6 ± 236.4a | ||
| 18 July 2019 | Upper layer | 1 | 180.5 ± 32.7b | 306.4 ± 49.3b | 481.3 ± 119.9b |
| 2 | 177.3 ± 33.1b | 312.2 ± 41.1b | 485.1 ± 79.1b | ||
| 3 | 175.1 ± 42.3b | 303.9 ± 66.9b | 479.9 ± 92.0b | ||
| 4 | 711.9 ± 25.0a | 1606.3± 48.8a | 2485.1 ± 92.0a | ||
| Middle layer | 1 | 167.6 ± 26.9b | 283.3 ± 44.2b | 395.0 ± 94.9b | |
| 2 | 166.1 ± 27.6b | 282.4 ± 45.5b | 396.7 ± 49.3b | ||
| 3 | 166.9 ± 42.3b | 277.6 ± 66.9b | 390.3 ± 89.4b | ||
| 4 | 209.1 ± 62.4a | 374.0 ± 84.3a | 650.9 ± 163.5a | ||
| Lower layer | 1 | 162.9 ± 48.5 b | 271.6 ± 57.5b | 365.8 ± 67.0b | |
| 2 | 159.5 ± 33.6b | 270.4 ± 78.4b | 368.4 ± 88.0b | ||
| 3 | 157.3 ± 26.8b | 262.9 ± 30.4b | 345.2 ± 35.8b | ||
| 4 | 206.4 ± 48.0a | 340.2 ± 78.5a | 514.3 ± 132.9a | ||
| Spraying Date | Treatment | CV (%) | |||
|---|---|---|---|---|---|
| Upper Layer | Middle Layer | Lower Layer | Average | ||
| 26 June 2019 | 1 | 57.72 | 64.24 | 67.90 | 63.29 |
| 2 | 48.41 | 70.24 | 88.69 | 69.11 | |
| 3 | 64.86 | 71.90 | 80.34 | 72.37 | |
| 4 | 50.49 | 63.06 | 60.85 | 58.13 | |
| 18 July 2019 | 1 | 64.79 | 77.75 | 77.45 | 73.33 |
| 2 | 41.01 | 80.99 | 94.80 | 72.27 | |
| 3 | 52.60 | 90.74 | 90.94 | 78.09 | |
| 4 | 49.26 | 64.50 | 60.68 | 58.15 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Q.; Du, R.; Yang, L.; Han, X.; Zhao, S.; Zhang, G.; Fu, W.; Wang, G.; Lan, Y. Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer. Agronomy 2020, 10, 215. https://doi.org/10.3390/agronomy10020215
Xiao Q, Du R, Yang L, Han X, Zhao S, Zhang G, Fu W, Wang G, Lan Y. Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer. Agronomy. 2020; 10(2):215. https://doi.org/10.3390/agronomy10020215
Chicago/Turabian StyleXiao, Qinggang, Rui Du, Lin Yang, Xiaoqiang Han, Sifeng Zhao, Guoqiang Zhang, Wei Fu, Guobin Wang, and Yubin Lan. 2020. "Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer" Agronomy 10, no. 2: 215. https://doi.org/10.3390/agronomy10020215