
Damage Characteristics of a Step Lap Joint Exposed to Flexural Loading for Its Different Configurations

Abstract
:1. Introduction
2. Numerical Modelling
Finite Element Modelling
3. Results and Discussion
3.1. Validation of the FE Model
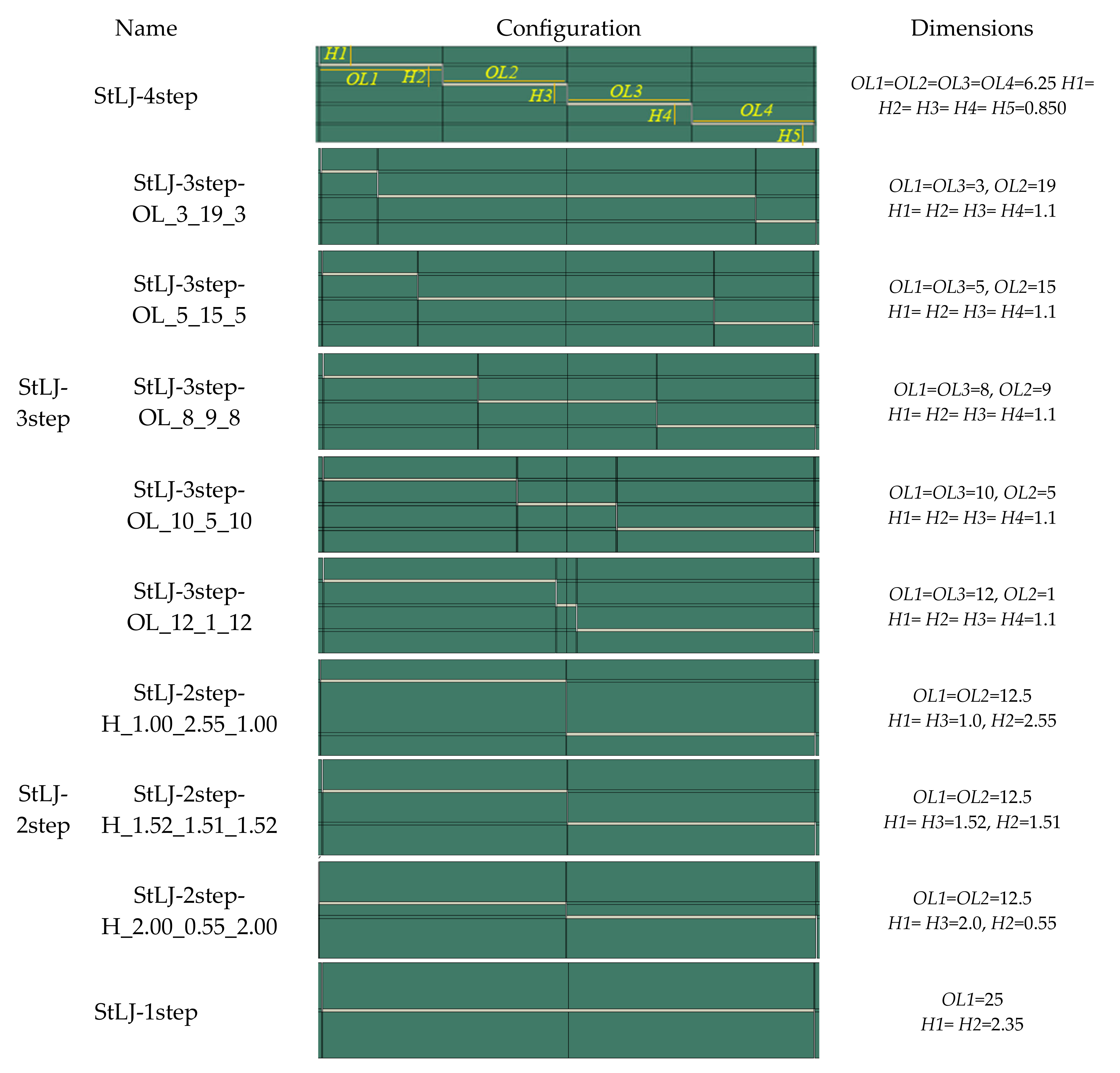
3.2. Effect of Number of Steps
3.3. Influence of Overlap Lengths at Various Steps
3.4. Influence of the Relative Heights of Different Steps
4. Concluding Remarks
- The three-stepped lap joint was found to carry the highest bending load and absorbed the highest amount of energy when compared to one-, two- and four-stepped lap joints.
- It is suggested to join the adherends using adhesives not only along their horizontal faces, but also along their vertical face for StLJs. By doing so, reasonable increases in Fbmax and EA can be attained.
- With an increase in the overlap length at the upper and lower steps, i.e., with the smallest portion at the mid step, the joint showed the best flexural performance. In this configuration, a more than 100% increase in EA was achieved.
- In line with the above point, when the upper and lower steps of the step lap joint were placed closer to the top and bottom surfaces of the joint, an around 1.87-fold increase in the Fbmax and an aroundp 3.40-fold increase in the EA were achieved.
- In stepped lap joints subjected to bending loads, portions of the adhesive layer located at or close to the neutral axis do not markedly contribute to the flexural strength.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Maggiore, S.; Banea, M.D.; Stagnaro, P.; Luciano, G. A review of structural adhesive joints in hybrid joining processes. Polymers 2021, 13, 3961. [Google Scholar] [CrossRef] [PubMed]
- Shang, X.; Marques, E.A.; Machado, J.J.; Carbas, R.J.; Jiang, D.; Da Silva, L.F. Review on techniques to improve the strength of adhesive joints with composite adherends. Compos. Part B Eng. 2019, 177, 107363. [Google Scholar] [CrossRef]
- Kimiaeifar, A.; Lund, E.; Thomsen, O.T.; Sørensen, J.D. Asymptotic sampling for reliability analysis of adhesive bonded stepped lap composite joints. Eng. Struct. 2013, 49, 655–663. [Google Scholar] [CrossRef]
- Kim, J.H.; Park, B.J.; Han, Y.W. Evaluation of fatigue characteristics for adhesively-bonded composite stepped lap joint. Compos. Struct. 2004, 66, 69–75. [Google Scholar] [CrossRef]
- Li, D.; Qing, G.; Liu, Y. A three-dimensional semi-analytical model for the composite laminated plates with a stepped lap repair. Compos. Struct. 2011, 93, 1673–1682. [Google Scholar] [CrossRef]
- Ichikawa, K.; Shin, Y.; Sawa, T. A three-dimensional finite-element stress analysis and strength evaluation of stepped-lap adhesive joints subjected to static tensile loadings. Int. J. Adhes. Adhes. 2008, 28, 464–470. [Google Scholar] [CrossRef]
- Sawa, T.; Ichikawa, K.; Shin, Y.; Kobayashi, T. A three-dimensional finite element stress analysis and strength prediction of stepped-lap adhesive joints of dissimilar adherends subjected to bending moments. Int. J. Adhes. Adhes. 2010, 30, 298–305. [Google Scholar] [CrossRef]
- Akpinar, S. The strength of the adhesively bonded step-lap joints for different step numbers. Compos. Part B Eng. 2014, 67, 170–178. [Google Scholar] [CrossRef]
- Durmus, M.; Akpinar, S. The experimental and numerical analysis of the adhesively bonded three step-lap joints with different step lengths. Theor. Appl. Fract. Mech. 2020, 105, 102427. [Google Scholar] [CrossRef]
- Mistry, S.; Joshi, P.; Dhandhukiya, R.; Gandhi Sh Bhanushali, N.; Desai, C. Finite element studies of bolted, riveted, bonded and hybrid step-lap joints of thick plate. Mater. Today Proc. 2022, 50, 1080–1087. [Google Scholar] [CrossRef]
- Gavgali, E.; Sahin, R.; Akpinar, S. An investigation of the fatigue performance of adhesively bonded step-lap joints: An experimental and numerical analysis. Int. J. Adhes. Adhes. 2021, 104, 102736. [Google Scholar] [CrossRef]
- Demiral, M.; Abbassi, F.; Muhammad, R.; Akpinar, S. Service Life Modelling of Single Lap Joint Subjected to Cyclic Bending Load. Aerospace 2023, 10, 8. [Google Scholar] [CrossRef]
- Zimmermann, N.; Wang, P.H. A review of failure modes and fracture analysis of aircraft composite materials. Eng. Fail. Anal. 2020, 115, 104692. [Google Scholar] [CrossRef]
- Ghabezi, P.; Farahani, M. Effects of nanoparticles on nanocomposites mode I and II fracture: A critical review. Prog. Adhes. Adhes. 2018, 3, 391–411. [Google Scholar]
- Sam-Daliri, O.; Farahani, M.; Araei, A. Condition monitoring of crack extension in the reinforced adhesive joint by carbon nanotubes. Weld. Technol. Rev. 2020, 91, 7–15. [Google Scholar] [CrossRef]
- Xu, D.; Liu, P.F.; Li, J.G.; Chen, Z.P. Damage mode identification of adhesive composite joints under hygrothermal environment using acoustic emission and machine learning. Compos. Struct. 2019, 211, 351–363. [Google Scholar] [CrossRef]
- Kadioglu, F.; Demiral, M. Failure behaviour of the single lap joints of angle-plied composites under three point bending tests. J. Adhes. Sci. Technol. 2020, 34, 531–548. [Google Scholar] [CrossRef]
- Oliviera, L.A.; Donadon, M.V. Delamination analysis using cohesive zone model: A discussion on traction-separation law and mixed-mode criteria. Eng. Fract. Mech. 2020, 228, 106922. [Google Scholar] [CrossRef]
- Kadioglu, F.E.; Demiral, M.; El Zaroug, M. Effects of overlap length on the strength of bolted, bonded and hybrid single lap joints with different adherend materials and thicknesses. J. Adhes. Sci. Technol. 2019, 33, 2191–2206. [Google Scholar] [CrossRef]
- Demiral, M.; Mamedov, A. Fatigue Performance of a Step-Lap Joint under Tensile Load: A Numerical Study. Polymers 2023, 15, 1949. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Size | Fb,max (N) |
|---|---|
| 0.5 mm × 0.5 mm × 0.5 mm | 1230 |
| 0.25 mm × 0.25 mm × 0.25 mm | 1120 |
| 0.125 mm × 0.125 mm × 0.125 mm | 1109 |
| AA2024-T3 | E (MPa) | (MPa) | ||||
| 72,400 | 0.33 | 324 | ||||
| DP460 | (N/mm3) | (MPa) | (MPa) | (N/mm) | (N/mm) | n |
| 105 | 32.6 | 28.5 | 2.56 | 11.71 | 2.0 |
| EA (J) | |||
|---|---|---|---|
| Configuration | Left Punch | Right Punch | Sum |
| StLJ-1step | 1.779 | 1.170 | 2.949 |
| StLJ-2step | 1.515 | 1.946 | 3.461 |
| StLJ-3step | 2.227 | 2.640 | 4.867 |
| StLJ3step_VerticalAdhesive | 2.742 | 2.774 | 5.516 |
| StLJ-4step | 1.819 | 2.012 | 3.831 |
| EA (J) | |||
|---|---|---|---|
| Configuration | Left Punch | Right Punch | Sum |
| StLJ-3step-OL_3_19_3 | 1.890 | 1.410 | 3.300 |
| StLJ-3step-OL_5_15_5 | 1.774 | 1.555 | 3.329 |
| StLJ-3step-OL_8_9_8 | 2.227 | 2.834 | 5.061 |
| StLJ-3step-OL_10_5_10 | 2.286 | 3.275 | 5.561 |
| StLJ-3step-OL_12_1_12 | 2.370 | 4.392 | 6.762 |
| EA (J) | |||
|---|---|---|---|
| Configuration | Left Punch | Right Punch | Sum |
| StLJ-2step-H_1.00_2.55_1.00 | 4.067 | 5.299 | 9.366 |
| StLJ-2step-H_1.52_1.51_1.52 | 1.515 | 2.661 | 4.176 |
| StLJ-2step-H_2.00_0.55_2.00 | 1.469 | 1.289 | 2.758 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demiral, M.; Kadioglu, F. Damage Characteristics of a Step Lap Joint Exposed to Flexural Loading for Its Different Configurations. Polymers 2023, 15, 2458. https://doi.org/10.3390/polym15112458
Demiral M, Kadioglu F. Damage Characteristics of a Step Lap Joint Exposed to Flexural Loading for Its Different Configurations. Polymers. 2023; 15(11):2458. https://doi.org/10.3390/polym15112458
Chicago/Turabian StyleDemiral, Murat, and Ferhat Kadioglu. 2023. "Damage Characteristics of a Step Lap Joint Exposed to Flexural Loading for Its Different Configurations" Polymers 15, no. 11: 2458. https://doi.org/10.3390/polym15112458