
Electrical Stability and Piezoresistive Sensing Performance of High Strain-Range Ultra-Stretchable CNT-Embedded Sensors

 ,
,  , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Specimens Details
2.2. Fabrication Details
2.3. Electrical Characterization
2.4. Cyclic Stretching Test
2.5. Human-Motion Sensing
3. Results and Discussion
3.1. Electrical Characteristics and Stability
3.2. Piezoresistive Sensing Responses of the Sensors against Cyclic Loading
3.3. Monitoring Movements of Human Fingers
4. Conclusions
- The percolation threshold of these sensors was approximately 2% as the conductivity drastically increased between 1 and 2% CNTs content. Therefore, the C0.5 specimens with 0.5% CNTs showed no conductivity at all.
- The electrical stability results indicated that the sensors conform to Ohm’s law. The sensors with a higher amount of CNTs showed excellent electrical stability.
- The electrical impedance of sensors decreased with the increase in input frequency. However, this variation was also minimized with the increase in CNTs content.
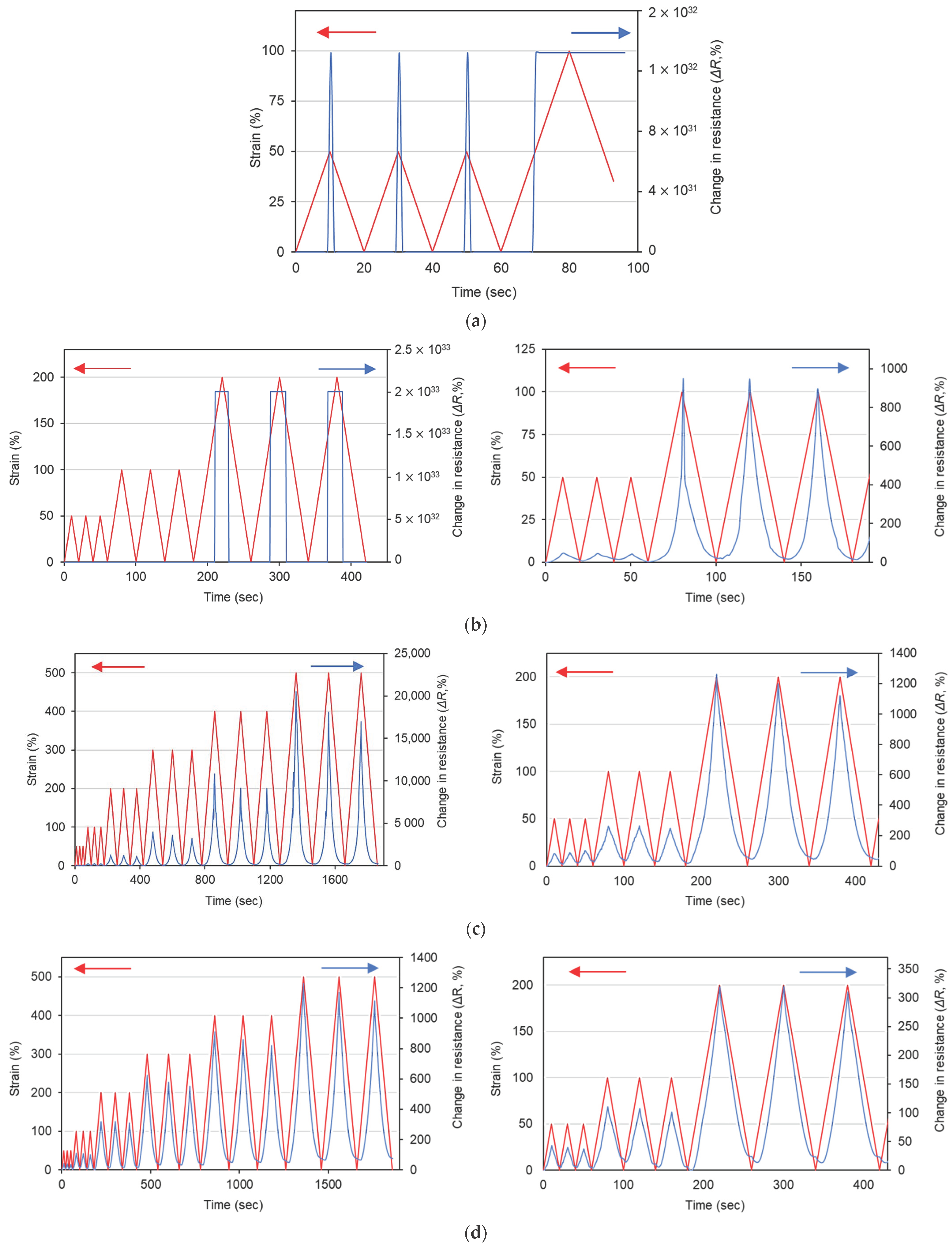
- The C1 and C1.5 sensors, with 1 and 1.5% CNTs contents, showed a complete loss of electrical paths at the applied strain amplitudes of 50% and 200%, respectively, since their CNTs content was less than the percolation threshold of these sensors.
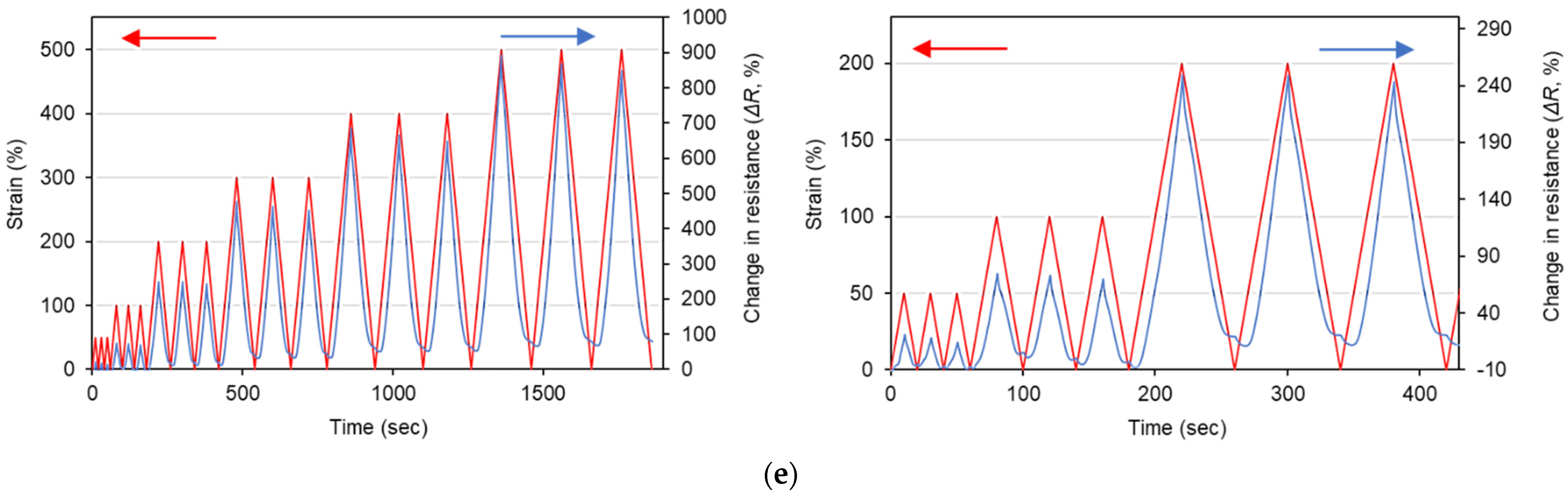
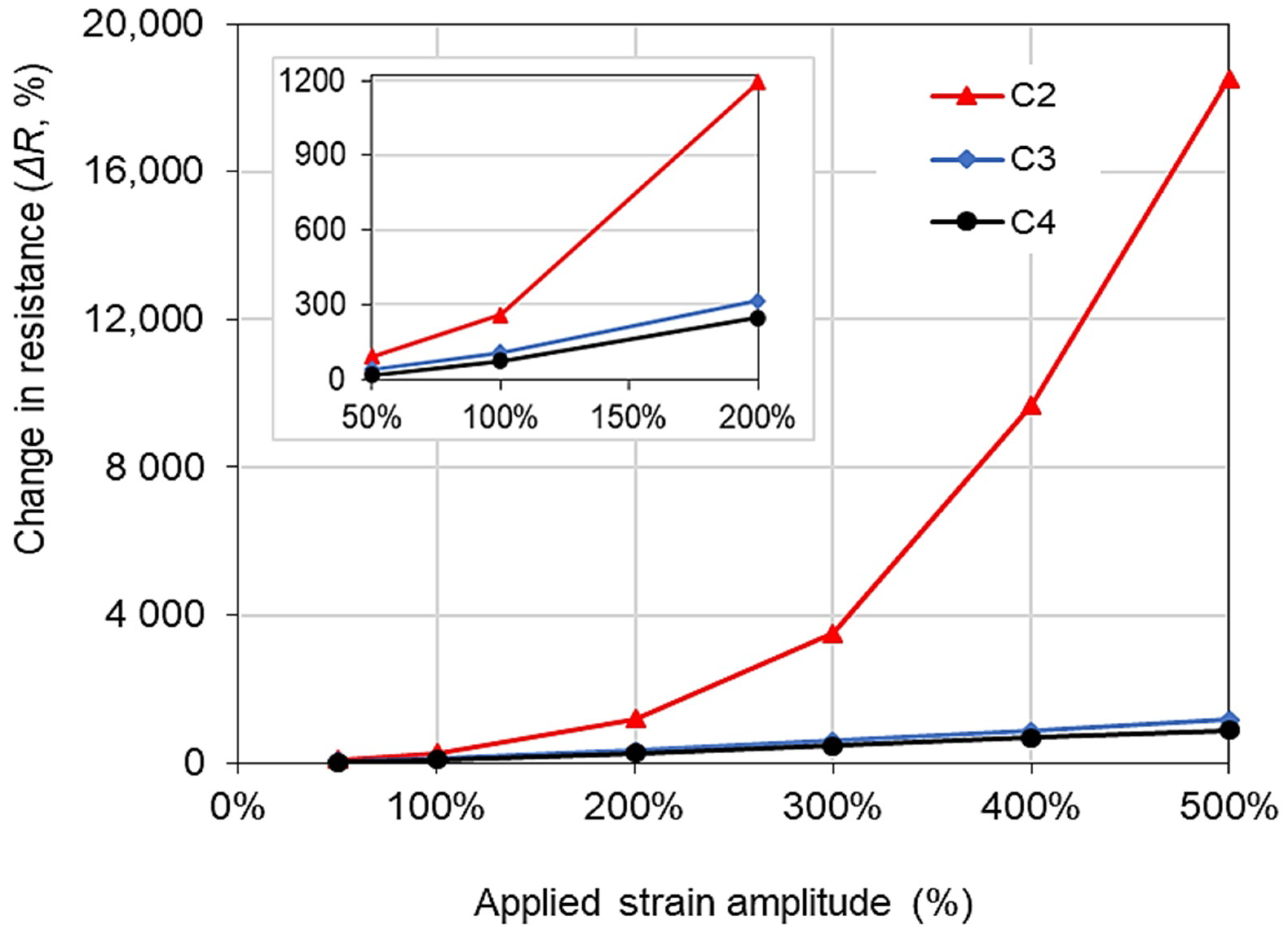
- Sensors with 2 to 4% CNTs content showed distinct measurable resistance changes up to 500% strain amplitude, which shows that these sensors can be used for a wide range of high strains.
- Among all the sensors, the C2 sensor showed the highest sensitivity with gauge factors ranging from approximately 1.79 for 50% strain to approximately 37.04 for 500% strain.
- Sensors with 2 to 4% CNTs content also exhibited high sensitivity against finger bending/releasing motions, which validates their potential for human-motion-sensing applications or use in wearable devices.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jang, D.; Farooq, S.Z.; Yoon, H.N.; Khalid, H.R. Design of a highly flexible and sensitive multi-functional polymeric sensor incorporating CNTs and carbonyl iron powder. Compos. Sci. Technol. 2021, 207, 108725. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Choudhry, I.; Khalid, H.R.; Lee, H.-K. Flexible piezoelectric transducers for energy harvesting and sensing from human kinematics. ACS Appl. Electron. Mater. 2020, 2, 3346–3357. [Google Scholar] [CrossRef]
- Wang, H.; Liu, J.; Cui, H.; Liu, Y.; Zhu, J.; Wang, H.; Song, G.; Li, Z.; Chen, D. Strain Sensor with High Sensitivity and Large Response Range Based on Self-Assembled Elastic-Sliding Conductive Networks. ACS Appl. Electron. Mater. 2021, 3, 1758–1770. [Google Scholar] [CrossRef]
- Bhandari, M.; Wang, J.; Jang, D.; Nam, I.; Huang, B. A Comparative Study on the Electrical and Piezoresistive Sensing Characteristics of GFRP and CFRP Composites with Hybridized Incorporation of Carbon Nanotubes, Graphenes, Carbon Nanofibers, and Graphite Nanoplatelets. Sensors 2021, 21, 7291. [Google Scholar] [CrossRef]
- Jang, D.; Yoon, H.N.; Farooq, S.Z.; Lee, H.K.; Nam, I.W. Influence of water ingress on the electrical properties and electromechanical sensing capabilities of CNT/cement composites. J. Build. Eng. 2021, 42, 103065. [Google Scholar] [CrossRef]
- Kim, Y.-K.; Kim, J.; Jang, D.; Kim, S.; Jung, W. A Study on the Effects of Multiwall Carbon Nanotubes on Dynamic Stiffness of Hydrophilic-base Magnetorheological Gel. Curr. Nanosci. 2018, 15, 319–323. [Google Scholar] [CrossRef]
- Kil, T.; Jang, D.I.; Yoon, H.N.; Yang, B. Machine Learning-Based Predictions on the Self-Heating Characteristics of Nanocomposites with Hybrid Fillers. Comput. Mater. Contin. 2022, 71, 4487–4502. [Google Scholar] [CrossRef]
- Jang, D.; Park, J.-E.; Kim, Y.-K. Evaluation of (CNT@CIP)-Embedded Magneto-Resistive Sensor Based on Carbon Nanotube and Carbonyl Iron Powder Polymer Composites. Polymers 2022, 14, 542. [Google Scholar] [CrossRef]
- Cui, J.; Nan, X.; Shao, G.; Sun, H. High-sensitivity flexible pressure sensor-based 3d cnts sponge for human–computer interaction. Polymers 2021, 13, 3465. [Google Scholar] [CrossRef]
- Khalid, H.R.; Choudhry, I.; Jang, D.; Abbas, N.; Haider, M.S.; Lee, H.K. Facile Synthesis of Sprayed CNTs Layer-Embedded Stretchable Sensors with Controllable Sensitivity. Polymers 2021, 13, 311. [Google Scholar] [CrossRef] [PubMed]
- Mishra, P.; Tai, N.H.; Harsh; Islam, S.S. Transfer of microstructure pattern of CNTs onto flexible substrate using hot press technique for sensing applications. Mater. Res. Bull. 2013, 48, 2804–2808. [Google Scholar] [CrossRef]
- Jang, D.; Choi, B.H.; Yoon, H.N.; Yang, B.; Lee, H.K. Improved electromagnetic wave shielding capability of carbonyl iron powder-embedded lightweight CFRP composites. Compos. Struct. 2022, 286, 115326. [Google Scholar] [CrossRef]
- Wang, X.; Li, J.; Song, H.; Huang, H.; Gou, J. Highly Stretchable and Wearable Strain Sensor Based on Printable Carbon Nanotube Layers/Polydimethylsiloxane Composites with Adjustable Sensitivity. ACS Appl. Mater. Interfaces 2018, 10, 7371–7380. [Google Scholar] [CrossRef] [PubMed]
- Nam, I.W.; Lee, H.K.; Jang, J.H. Electromagnetic interference shielding/absorbing characteristics of CNT-embedded epoxy composites. Compos. Part. A Appl. Sci. Manuf. 2011, 42, 1110–1118. [Google Scholar] [CrossRef]
- Jang, D.; Yoon, H.N.; Seo, J.; Park, S.; Kil, T.; Lee, H.K. Improved electric heating characteristics of CNT-embedded polymeric composites with an addition of silica aerogel. Compos. Sci. Technol. 2021, 212, 108866. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef]
- Jang, D.I.; Yoon, H.N.; Nam, I.W.; Lee, H.K. Effect of carbonyl iron powder incorporation on the piezoresistive sensing characteristics of CNT-based polymeric sensor. Compos. Struct. 2020, 244, 112260. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Dai, K.; Wang, Y.; Zheng, G.; Liu, C.; Shen, C. A highly stretchable and stable strain sensor based on hybrid carbon nanofillers/polydimethylsiloxane conductive composites for large human motions monitoring. Compos. Sci. Technol. 2018, 156, 276–286. [Google Scholar] [CrossRef]
- Amjadi, M.; Yoon, Y.J.; Park, I. Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecoflex nanocomposites. Nanotechnology 2015, 26, 375501. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, M.; Zhou, Z.; Gou, J.; Hui, D. 3D printing of polymer matrix composites: A review and prospective. Compos. Part. B Eng. 2017, 110, 442–458. [Google Scholar] [CrossRef]
- Lee, H.; Kwon, D.; Cho, H.; Park, I.; Kim, J. Soft Nanocomposite Based Multi-point, Multi-directional Strain Mapping Sensor Using Anisotropic Electrical Impedance Tomography. Sci. Rep. 2017, 7, 39837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jang, D.; Yoon, H.N.; Seo, J.; Yang, B. Effects of exposure temperature on the piezoresistive sensing performances of MWCNT-embedded cementitious sensor. J. Build. Eng. 2022, 47, 103816. [Google Scholar] [CrossRef]
- Kim, G.M.; Kil, T.; Lee, H.K. A novel physicomechanical approach to dispersion of carbon nanotubes in polypropylene composites. Compos. Struct. 2021, 258, 113377. [Google Scholar] [CrossRef]
- Yoon, H.N.; Jang, D.; Lee, H.K.; Nam, I.W. Influence of carbon fiber additions on the electromagnetic wave shielding characteristics of CNT-cement composites. Constr. Build. Mater. 2020, 269, 121238. [Google Scholar] [CrossRef]
- Sandler, J.K.W.; Kirk, J.E.; Kinloch, I.A.; Shaffer, M.S.P.; Windle, A.H. Ultra-low electrical percolation threshold in carbon-nanotube-epoxy composites. Polymers 2003, 44, 5893–5899. [Google Scholar] [CrossRef]
- Souri, H.; Nam, I.W.; Lee, H.K. Electrical properties and piezoresistive evaluation of polyurethane-based composites with carbon nano-materials. Compos. Sci. Technol. 2015, 121, 41–48. [Google Scholar] [CrossRef]
- Simmons, J.G. Generalized Formula for the Electric Tunnel Effect between Similar Electrodes Separated by a Thin Insulating Film. J. Appl. Phys. 1963, 34, 1793–1803. [Google Scholar] [CrossRef] [Green Version]
- Jang, H.G.; Yang, B.; Khil, M.S.; Kim, S.Y.; Kim, J. Comprehensive study of effects of filler length on mechanical, electrical, and thermal properties of multi-walled carbon nanotube/polyamide 6 composites. Compos. Part. A Appl. Sci. Manuf. 2019, 125, 105542. [Google Scholar] [CrossRef]
- Park, J.E.; Yun, G.E.; Jang, D.I.; Kim, Y.K. Analysis of electrical resistance and impedance change of magnetorheological gels with DC and AC voltage for magnetometer application. Sensors 2019, 19, 2510. [Google Scholar] [CrossRef] [Green Version]
- Jang, D.; Yoon, H.N.; Seo, J.; Lee, H.K.; Kim, G.M. Effects of silica aerogel inclusion on the stability of heat generation and heat-dependent electrical characteristics of cementitious composites with CNT. Cem. Concr. Compos. 2021, 115, 103861. [Google Scholar] [CrossRef]
- Jang, D.; Kil, T.; Yoon, H.N.; Seo, J.; Khalid, H.R. Artificial neural network approach for predicting tunneling-induced and frequency-dependent electrical impedances of conductive polymeric composites. Mater. Lett. 2021, 302, 130420. [Google Scholar] [CrossRef]
- Al-Saleh, M.H.; Al-Anid, H.K.; Husain, Y.A.; El-Ghanem, H.M.; Jawad, S.A. Impedance characteristics and conductivity of CNT/ABS nanocomposites. J. Phys. D. Appl. Phys. 2013, 46, 385305. [Google Scholar] [CrossRef]
- Cortés, A.; Sánchez-Romate, X.F.; Jiménez-Suárez, A.; Campo, M.; Esmaeili, A.; Sbarufatti, C.; Ureña, A.; Prolongo, S.G. Complex geometry strain sensors based on 3d printed nanocomposites: Spring, three-column device and footstep-sensing platform. Nanomaterials 2021, 11, 1106. [Google Scholar] [CrossRef]
- Esmaeili, A.; Sbarufatti, C.; Ma, D.; Manes, A.; Jiménez-Suárez, A.; Ureña, A.; Dellasega, D.; Hamouda, A.M.S. Strain and crack growth sensing capability of SWCNT reinforced epoxy in tensile and mode I fracture tests. Compos. Sci. Technol. 2020, 186. [Google Scholar] [CrossRef]
- Yang, B.; Kim, G.; Resources, M. Effect of CNT Agglomeration on the Electrical Conductivity and Percolation Threshold of Nanocomposites: A Micromechanics-based Approach. Comp. Model Eng. Sci. 2014, 104, 343–365. [Google Scholar]
- Larimi, S.R.; Rezaei Nejad, H.; Oyatsi, M.; O’Brien, A.; Hoorfar, M.; Najjaran, H. Low-cost ultra-stretchable strain sensors for monitoring human motion and bio-signals. Sens. Actuators A Phys. 2018, 271, 182–191. [Google Scholar] [CrossRef]
- Yan, T.; Wang, Z.; Wang, Y.Q.; Pan, Z.J. Carbon/graphene composite nanofiber yarns for highly sensitive strain sensors. Mater. Des. 2018, 143, 214–223. [Google Scholar] [CrossRef]
- Niu, D.; Jiang, W.; Ye, G.; Wang, K.; Yin, L.; Shi, Y.; Chen, B.; Luo, F.; Liu, H. Graphene-elastomer nanocomposites based flexible piezoresistive sensors for strain and pressure detection. Mater. Res. Bull. 2018, 102, 92–99. [Google Scholar] [CrossRef]
- Mersch, J.; Winger, H.; Nocke, A.; Cherif, C.; Gerlach, G. Experimental Investigation and Modeling of the Dynamic Resistance Response of Carbon Particle-Filled Polymers. Macromol. Mater. Eng. 2020, 305, 2000361. [Google Scholar] [CrossRef]
- Zhang, R.; Deng, H.; Valenca, R.; Jin, J.; Fu, Q.; Bilotti, E.; Peijs, T. Strain sensing behaviour of elastomeric composite films containing carbon nanotubes under cyclic loading. Compos. Sci. Technol. 2013, 74, 1–5. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | CNT (wt.%) | Silicone Polymer (g) | CNT (g) |
|---|---|---|---|
| C0.5 | 0.5 | 80 | 0.4 |
| C1 | 1 | 80 | 0.8 |
| C1.5 | 1.5 | 80 | 1.2 |
| C2 | 2 | 80 | 1.6 |
| C3 | 3 | 80 | 2.4 |
| C4 | 4 | 80 | 3.2 |
| Specimen | Applied Strain Amplitude (%) | |||||
|---|---|---|---|---|---|---|
| 50% | 100% | 200% | 300% | 400% | 500% | |
| C2 | 1.79 | 2.58 | 5.97 | 11.65 | 24.20 | 37.04 |
| C3 | 0.8 | 1.06 | 1.58 | 1.95 | 2.16 | 2.34 |
| C4 | 0.36 | 0.73 | 1.37 | 1.55 | 1.67 | 1.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalid, H.R.; Jang, D.; Abbas, N.; Haider, M.S.; Bukhari, S.N.A.; Mirza, C.R.; Elboughdiri, N.; Ahmad, F. Electrical Stability and Piezoresistive Sensing Performance of High Strain-Range Ultra-Stretchable CNT-Embedded Sensors. Polymers 2022, 14, 1366. https://doi.org/10.3390/polym14071366
Khalid HR, Jang D, Abbas N, Haider MS, Bukhari SNA, Mirza CR, Elboughdiri N, Ahmad F. Electrical Stability and Piezoresistive Sensing Performance of High Strain-Range Ultra-Stretchable CNT-Embedded Sensors. Polymers. 2022; 14(7):1366. https://doi.org/10.3390/polym14071366
Chicago/Turabian StyleKhalid, Hammad R., Daeik Jang, Nadir Abbas, M. Salman Haider, Syed N. A. Bukhari, Cyrus R. Mirza, Noureddine Elboughdiri, and Furqan Ahmad. 2022. "Electrical Stability and Piezoresistive Sensing Performance of High Strain-Range Ultra-Stretchable CNT-Embedded Sensors" Polymers 14, no. 7: 1366. https://doi.org/10.3390/polym14071366