
Self-Powered Gradient Hydrogel Sensor with the Temperature-Triggered Reversible Adhension
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Section
2.1. Materials
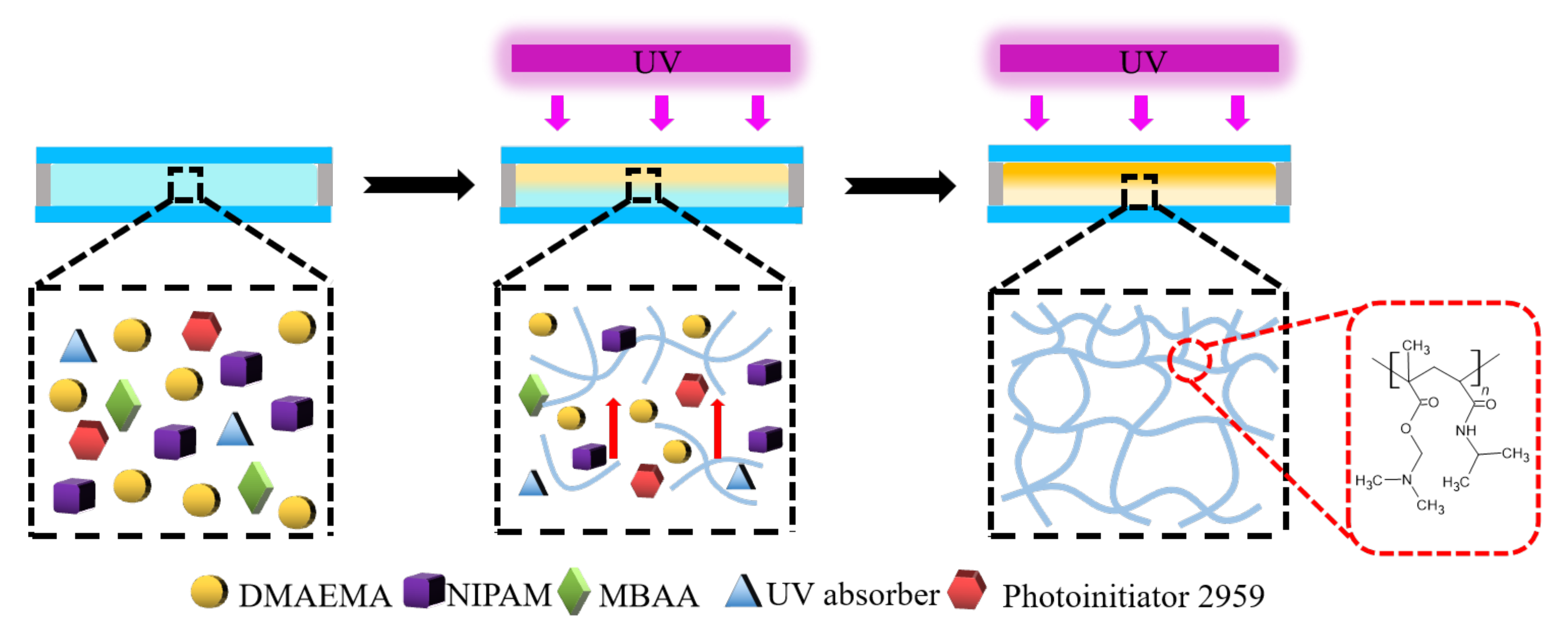
2.2. Preparation of the Gradient Polyelectrolyte Hydrogels
2.3. Preparation of Self-Powered Sensors
2.4. Characterization
3. Results and Discussion
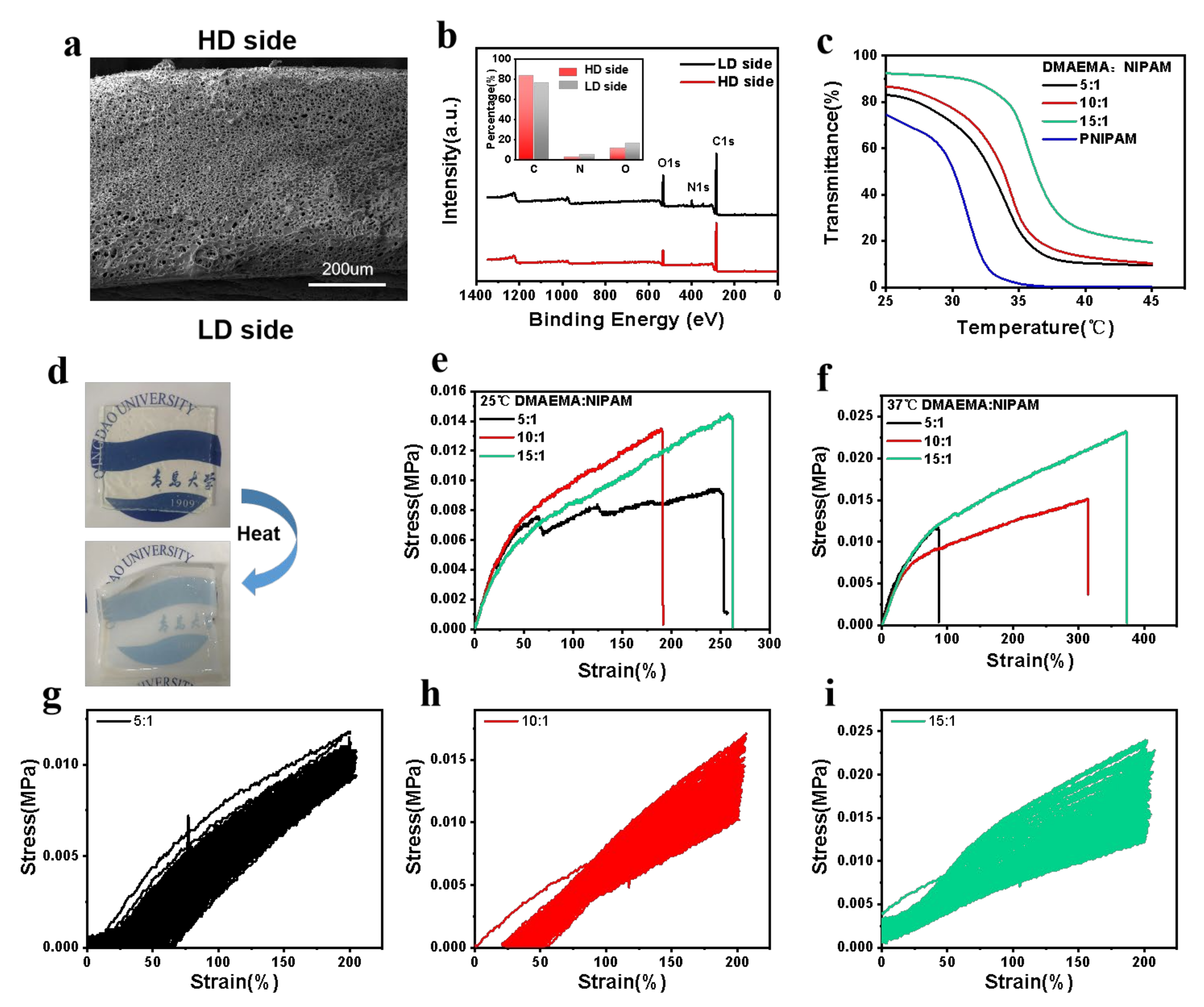
3.1. Preparation and Characterization
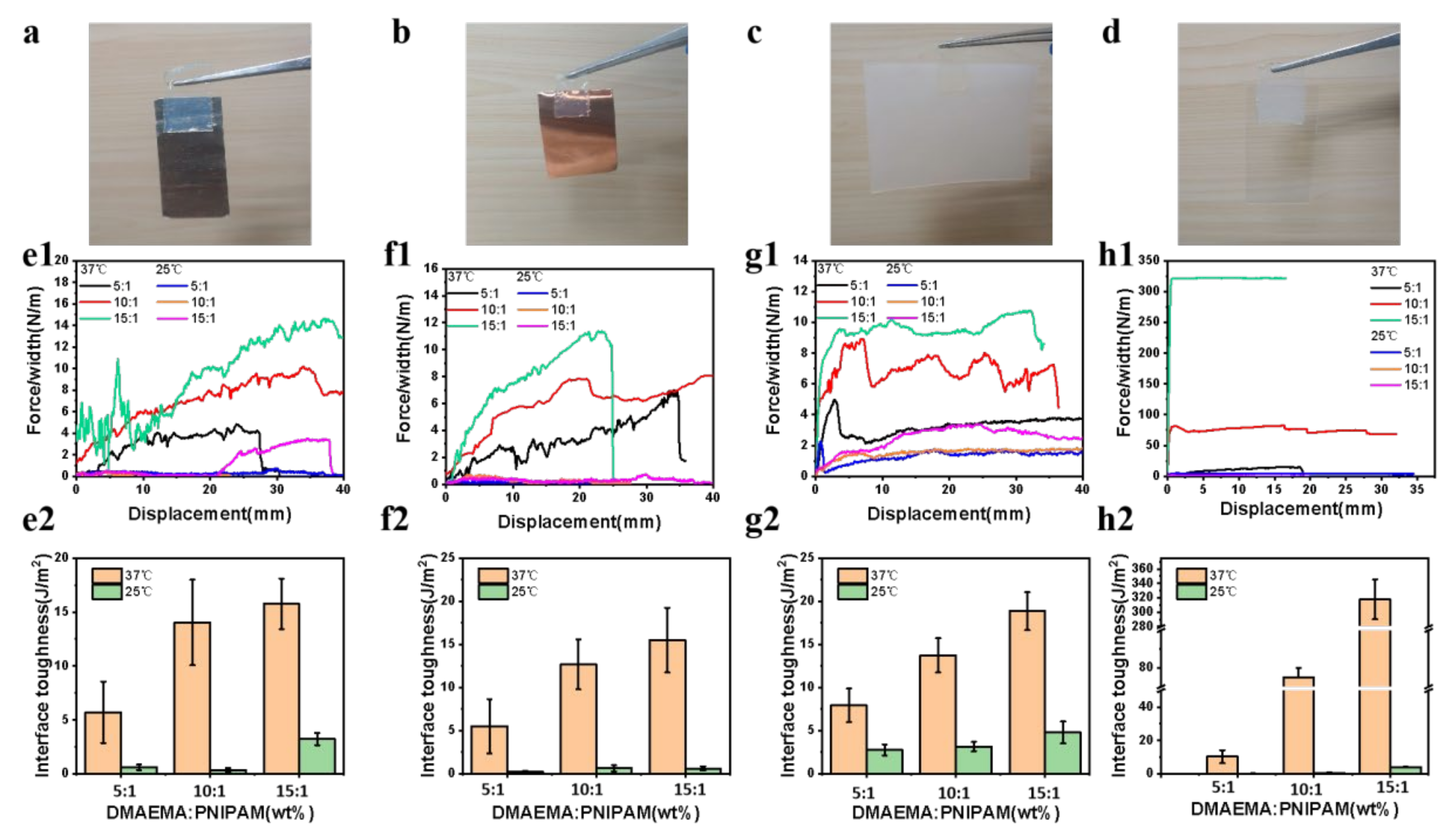
3.2. Adhesion Properties of the Hydrogels
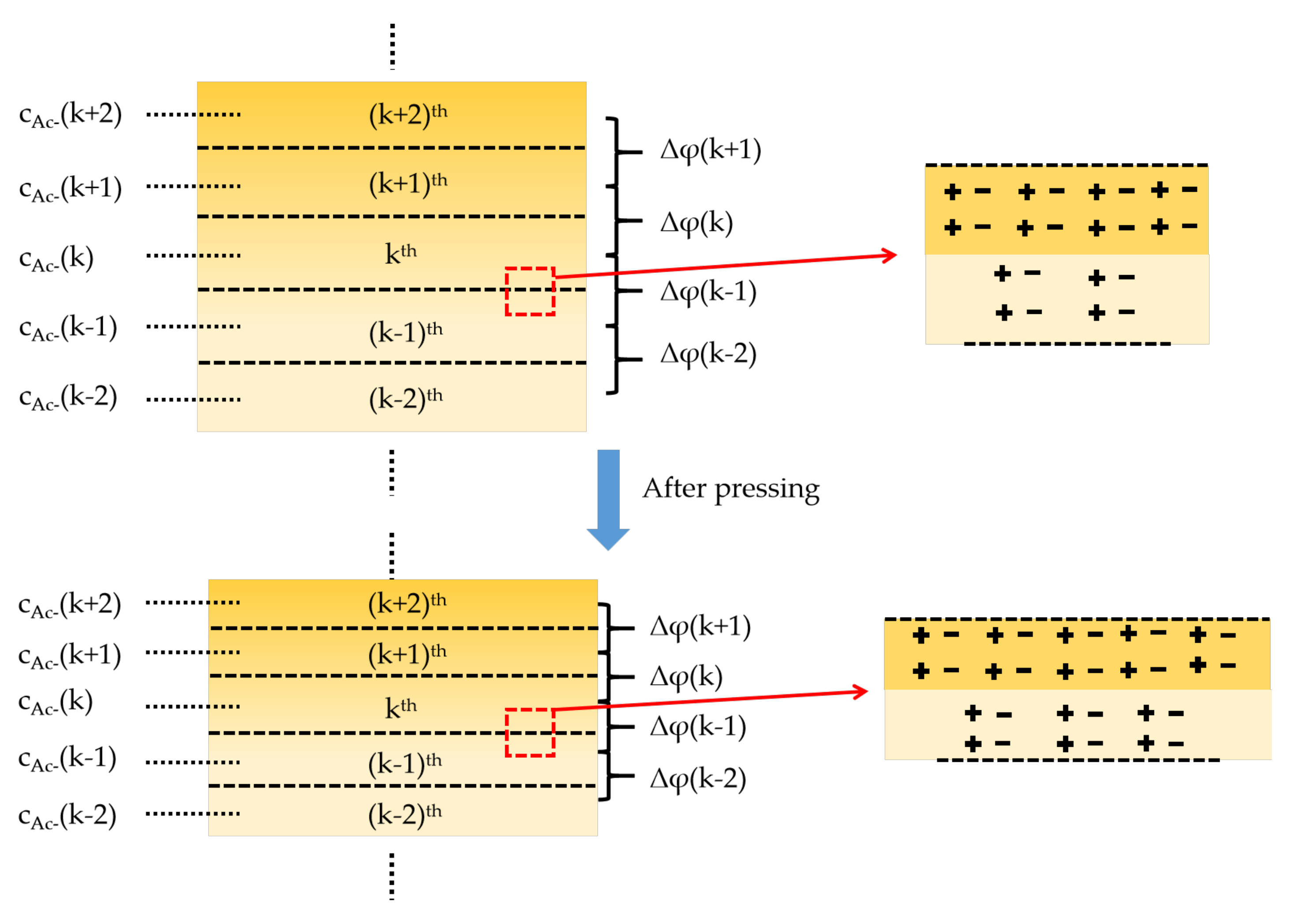
3.3. Sensing Mechanism of Self-Powered Gradient Hydrogel
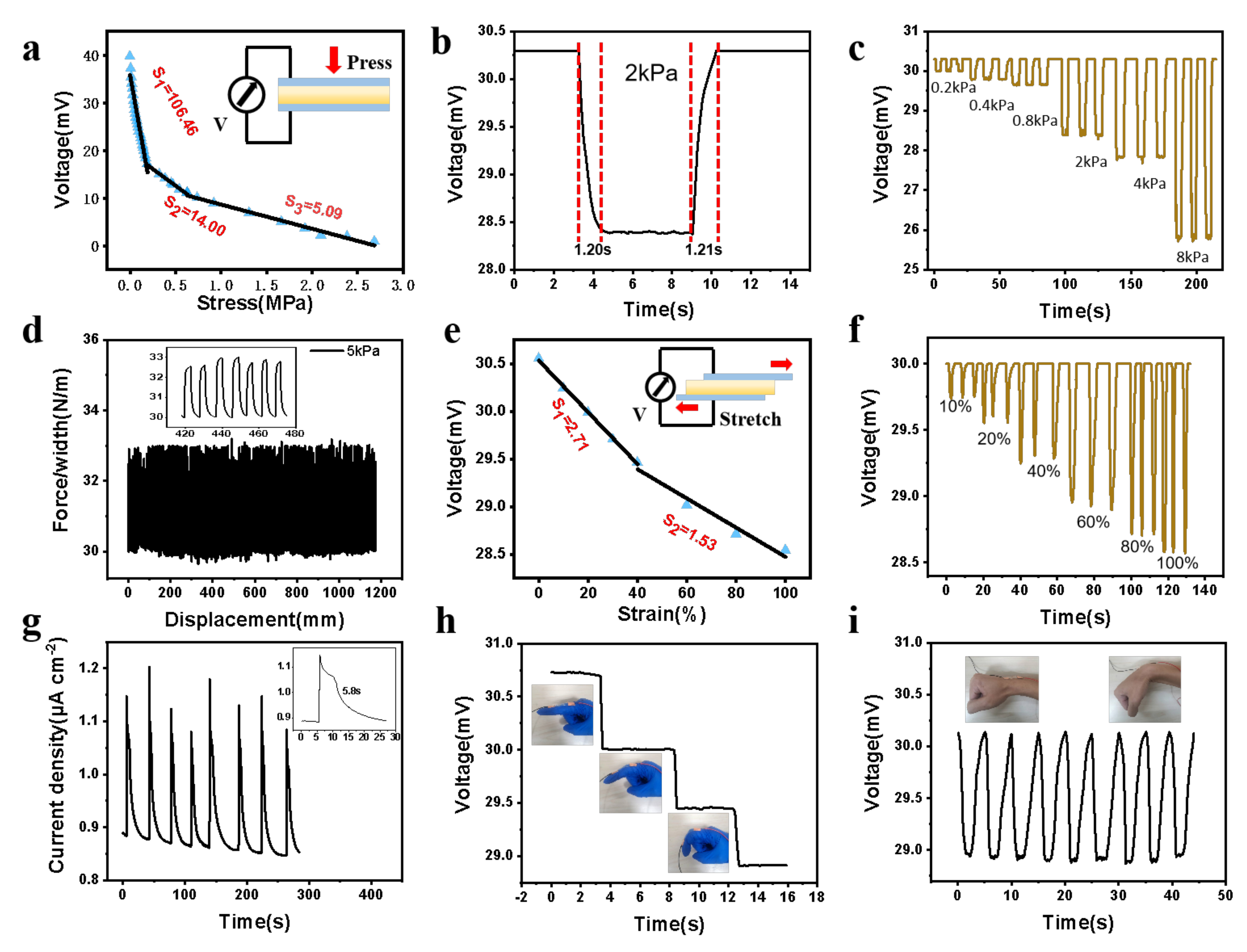
3.4. Pressure- and Strain-Sensing Performance
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent progress in flexible tactile sensors for human-interactive systems: From sensors to advanced applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef] [PubMed]
- Ning, C.; Ceng, R.; Jiang, Y.; Sheng, F.; Yi, J.; Shen, S.; Zhang, Y.; Peng, X.; Dong, K.; Wang, Z. Helical fiber strain sensors based on triboelectric nanogenerators for self-powered human respiratory monitoring. CS Nano 2022, 16, 2811–2821. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Wang, Y.; Guo, C. Recent Progresses on Flexible Tactile Sensors. Mater. Today Phys. 2017, 1, 61–73. [Google Scholar] [CrossRef]
- Tan, Y.; Yang, K.; Wang, B.; Li, H.; Wang, L.; Wang, C. High-performance textile piezoelectric pressure sensor with novel structural hierarchy based on ZnO nanorods array for wearable application. Nano Res. 2021, 14, 3969–3976. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, J.; Zhang, C.; Sun, M.; Han, S.; Zhang, R.; Liang, N.; Sun, D.; Liu, H. Energy-efficient, fully flexible, high-performance tactile sensor based on piezotronic effect: Piezoelectric signal amplified with organic field-effect transistors. Nano Energy 2020, 76, 105050. [Google Scholar] [CrossRef]
- Yan, J.; Han, Y.; Xia, S.; Wang, X.; Zhang, Y.; Yu, J.; Ding, B. Polymer template synthesis of flexible BaTiO3 crystal nanofibers. Adv. Funct. Mater. 2019, 29, 1907919. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, H.; Zhao, L.; Liu, S.; Yao, K.; Li, D.; Yiu, C.; Gao, S.; Avila, R.; Chirarattananon, P.; et al. Electronic Skin from High-Throughput Fabrication of Intrinsically Stretchable Lead Zirconate Titanate Elastomer. Research 2020, 2020, 1085417. [Google Scholar] [CrossRef]
- Li, H.; Jin, S.; Lim, J.; Lim, S. Solvent-assisted precipitation direct-write printing toward in-suit oriented β-phase polyvinylidene fluoride with tunable microarchitectures for energy harvesting and self-powered sensing. Appl. Mater. Today 2022, 29, 101633. [Google Scholar] [CrossRef]
- Li, H.; Lim, S. High-performance piezoelectric nanogenerators featuring embedded organic nanodroplets for self-powered sensors. J. Mater. Chem. A 2022, 10, 14894. [Google Scholar] [CrossRef]
- Shin, Y.; Sohn, S.; Han, H.; Park, Y.; Shin, H.; Ko, H. Self-powered triboelectric/pyroelectric multimodal sensors with enhanced performances and decoupled multiple stimuli. Nano Energy 2020, 72, 104671. [Google Scholar] [CrossRef]
- Yang, P.; Shi, Y.; Li, S.; Tao, X.; Liu, Z.; Wang, X.; Wang, Z.; Chen, X. Monitoring the degree of comfort of shoes in-motion using triboelectric pressure sensors with an ultrawide detection range. ACS Nano 2022, 16, 4654–4665. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Zhang, D.; Yang, Y.; Mi, Q.; Zhang, J.; Yu, L. Multifunctional latex/polytetraflfluoroethylene-based triboelectric nanogenerator for self-powered organ-like MXene/metal-organic framework-derived CuO nanohybrid ammonia sensor. ACS Nano 2021, 15, 2911–2919. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, L.; Xia, Y.; Qiu, R.; Liu, W.; Wu, M.; Zhu, Y.; Zhu, S.; Jia, C.; Zhu, M.; et al. Flexible high-resolution triboelectric sensor array based on patterned laser-induced graphene for self-powered real-time tactile sensing. Adv. Funct. Mater. 2021, 31, 2100709. [Google Scholar] [CrossRef]
- Zhu, X.; Qi, P.; Fan, W.; Wang, H.; Sui, K. Bioinspired multifunctional self-powered ionic receptors derived by gradient polyelectrolyte hydrogels. Chem. Eng. J. 2022, 438, 135610. [Google Scholar] [CrossRef]
- Xia, M.; Pan, N.; Zhang, C.; Zhang, C.; Fan, W.; Xia, Y.; Wang, Z.; Sui, K. Self-powered multifunction ionic skins based on gradient polyelectrolyte hydrogels. ACS Nano 2022, 16, 4714–4725. [Google Scholar] [CrossRef] [PubMed]
- Chun, S.; Kim, D.; Baik, S.; Lee, H.; Lee, J.; Bhang, S.; Pang, C. Conductive and stretchable adhesive electronics with miniaturized octopus-like suckers against dry/wet skin for biosignal monitoring. Adv. Funct. Mater. 2018, 28, 1805224. [Google Scholar] [CrossRef]
- Lee, H.; Um, D.; Lee, Y.; Lim, S.; Kim, H.; Ko, H. Octopus-inspired smart adhesive pads for transfer printing of semiconducting nanomembranes. Adv. Mater. 2016, 28, 7457–7465. [Google Scholar] [CrossRef]
- Baik, S.; Kim, J.; Lee, H.J.; Lee, T.H.; Pang, C. Highly adaptable and biocompatible octopus-like adhesive patches with meniscus-controlled unfoldable 3D microtips for underwater surface and hairy skin. Adv. Sci. 2018, 5, 1800100. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, L.; Zhang, D.; Zhang, P.; Han, Z. Bioinspired surface for surgical graspers based on the strong wet friction of tree frog toe pads. ACS Appl. Mater. Interfaces 2015, 7, 13987–13995. [Google Scholar] [CrossRef]
- Drotlef, D.; Amjadi, M.; Yunusa, M.; Sitti, M. Bioinspired composite microfibers for skin adhesion and signal amplification of wearable sensors. Adv. Mater. 2017, 29, 1701353. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.; Kenaley, C.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T.; et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef] [Green Version]
- Pei, X.; Zhang, H.; Zhou, Y.; Zhoua, L.; Fu, J. Stretchable, self-healing and tissue-adhesive zwitterionic hydrogels as strain sensors for wireless monitoring of organ motions. Mater. Horiz. 2020, 7, 1872–1882. [Google Scholar] [CrossRef]
- Gao, G.; Yang, F.; Zhou, F.; He, J.; Lu, W.; Xiao, P.; Yan, H.; Pan, C.; Chen, T.; Wang, Z. Bioinspired self-healing human-machine interactive touch pad with pressure-sensitive adhesiveness on targeted substrates. Adv. Mater. 2020, 32, 2004290. [Google Scholar] [CrossRef]
- Li, J.; Celiz, A.; Yang, J.; Yang, Q.; Wamala, I.; Whyte, W.; Seo, B.; Vasilyev, N.; Vlassak, J.; Suo, Z.; et al. Tough adhesives for diverse wet surfaces. Science 2017, 357, 378–381. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Nian, G.; Yang, C.; Qu, S.; Suo, Z. Bonding dissimilar polymer networks in various manufacturing processes. Nat. Commun. 2018, 9, 846. [Google Scholar] [CrossRef] [Green Version]
- Saiz-Poseu, J.; Mancebo-Aracil, J.; Nador, F.; Busqu, F.; Ruiz-Molina, D. The chemistry behind catechol-based adhesion. Angew. Chem. Int. Ed. 2019, 58, 696–714. [Google Scholar] [CrossRef]
- Chena, X.; Yuka, H.; Wua, J.; Nabzdykb, C.; Zhao, X. Instant tough bioadhesive with triggerable benign detachment. Proc. Natl. Acad. Sci. USA 2020, 117, 15497–15503. [Google Scholar] [CrossRef]
- Gao, Y.; Wu, K.; Suo, Z. Photodetachable adhesion. Adv. Mater. 2019, 31, 1806948. [Google Scholar] [CrossRef]
- Hohl, D.; Weder, C. (De)bonding on demand with optically switchable adhesives. Adv. Opt. Mater. 2019, 7, 1900230. [Google Scholar] [CrossRef]
- Eisenhaure, J.; Kim, S. An internally heated shape memory polymer dry adhesive. Polymers 2014, 6, 2274–2286. [Google Scholar] [CrossRef]
- Drotlef, D.; Blümler, P.; Campo, A. Magnetically actuated patterns for bioinspired reversible adhesion (dry and wet). Adv. Mater. 2014, 26, 775–779. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, Q.; Wu, P. A multifunctional skin-like sensor based on a 3D printed thermo responsive hydrogel. Mater. Horiz. 2017, 4, 694–700. [Google Scholar] [CrossRef]
- Lei, Z.; Wu, P. Zwitterionic skins with a wide scope of customizable functionalities. ACS Nano 2018, 12, 12860–12868. [Google Scholar] [CrossRef]
- Shi, X.; Wu, P. A smart patch with an-demand detachable adhesion for bioelectronics. Small 2021, 17, 2101220. [Google Scholar] [CrossRef]
- Tang, L.; Wang, L.; Yang, X.; Feng, Y.; Li, Y.; Feng, W. Poly(N-isopropylacrylamide)-based smart hydrogels: Design, properties and applications. Prog. Mater. Sci. 2021, 115, 100702. [Google Scholar] [CrossRef]
- Halperin, A.; Krçger, M.; Winnik, F.M. Poly(N-isopropylacrylamide) phase diagrams: Fifty years of research. Angew. Chem. Int. Ed. 2015, 54, 15342–15367. [Google Scholar] [CrossRef]
- Cui, C.; Wu, T.; Chen, X.; Liu, Y.; Li, Y.; Xu, Z.; Fan, C.; Liu, W. A janus hydrogel wet adhesive for internal tissue repair and anti-postoperative adhesion. Adv. Funct. Mater. 2020, 30, 2005689. [Google Scholar] [CrossRef]
- Gao, M.; Wu, H.; Plamthottam, R.; Xie, Z.; Liu, Y.; Hu, J.; Wu, S.; Wu, L.; He, X.; Pei, Q. Skin temperature-triggered, debonding-on-demand sticker for a self-powered mechanosensitive communication system. Matter 2021, 4, 1962–1974. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, Z.; Zhao, X.; An, L.; Xu, L.; Xun, X.; Zhao, B.; Ouyang, T.; Kang, Z.; Liao, Q.; et al. Highly conductive and stretching-insensitive films for wearable accurate pressure perception. Chem. Eng. J. 2022, 429, 132488. [Google Scholar] [CrossRef]
- Su, Q.; Zou, Q.; Li, Y.; Chen, Y.; Teng, S.; Kelleher, J.T.; Nith, R.; Cheng, P.; Li, N.; Liu, W.; et al. A stretchable and strain-unperturbed pressure sensor for motion interference-free tactile monitoring on skins. Sci. Adv. 2021, 7, eabi456. [Google Scholar] [CrossRef]
- Mariello, M.; Fachechi, L.; Guido, F.; Vittorio, M.D. Conformal, Ultra-thin Skin-Contact-Actuated Hybrid Piezo/Triboelectric Wearable Sensor Based on AlN and ParyleneEncapsulated Elastomeric Blend. Adv. Funct. Mater. 2021, 31, 2101047. [Google Scholar] [CrossRef]
- Tian, G.; Deng, W.; Gao, Y.; Xiong, D.; Yan, C.; He, X.; Yang, T.; Jin, L.; Chu, X.; Zhang, H.; et al. Rich lamellar crystal baklava-structured PZT/PVDF piezoelectric sensor toward individual table tennis training. Nano Energy 2019, 59, 574–581. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Peng, C.; Tang, Y.; Qi, P.; Fan, W.; Xu, Q.; Sui, K. Self-Powered Gradient Hydrogel Sensor with the Temperature-Triggered Reversible Adhension. Polymers 2022, 14, 5312. https://doi.org/10.3390/polym14235312
Sun D, Peng C, Tang Y, Qi P, Fan W, Xu Q, Sui K. Self-Powered Gradient Hydrogel Sensor with the Temperature-Triggered Reversible Adhension. Polymers. 2022; 14(23):5312. https://doi.org/10.3390/polym14235312
Chicago/Turabian StyleSun, Dong, Cun Peng, Yuan Tang, Pengfei Qi, Wenxin Fan, Qiang Xu, and Kunyan Sui. 2022. "Self-Powered Gradient Hydrogel Sensor with the Temperature-Triggered Reversible Adhension" Polymers 14, no. 23: 5312. https://doi.org/10.3390/polym14235312