1. Introduction
Liquid crystal biosensors are optical sensors that detect biological and chemical species using liquid crystals as sensing substrates. Liquid crystals have specific properties like birefringence and high sensitivity of orientation when interacting with biomolecules in aqueous solutions [
1,
2]. Thermotropic liquid crystals have been demonstrated to detect a wide range of biomolecules and can be fabricated into thin films or microdroplet emulsions in water [
3,
4,
5]. Liquid crystal biosensors work based on the orientation changes in response to the interface realignment. The orientation of liquid crystals in the bulk depends on the properties and geometry of the interfaces. In general, any changes at the liquid crystal surface could be propagated through the bulk up to 100 μm due to the long-range orientational order. Polarized light can be utilized to amplify and observe the small variation in liquid crystal interface alignment. This can be used as the basis to develop liquid crystal biosensors to detect biological or chemical agents. Studies show that the adsorption of phospholipids, surfactants, proteins, and bacteria at the interface triggers the ordering transmission by changing the anchoring and easy axis at the liquid crystal interface [
6,
7,
8].
Liquid crystal films and droplets in aqueous solutions are examples of platforms that detect biological species due to their intermolecular interactions. There is a wide range of biological species that liquid crystal biosensors can detect, including bacteria, viruses, and proteins. Therefore, they could be used in areas such as medical, environmental, and food sectors [
9,
10,
11].
Researchers have shown that liquid crystals in water emulsions can be used for the detection of target analytes. Changing the droplet orientation from bipolar to radial and changing the optical texture allows for the detection of chemical and biological species [
12,
13,
14,
15,
16,
17].
Emulsions of liquid crystals provide an additional advantage over liquid crystals formed at planar interfaces. Liquid crystal droplet biosensors do not require the preparation of a solid substrate. In addition, the droplet has a higher surface area to volume ratio and can adsorb a wide variety of targets on its surfaces, allowing a greater amount of target analytes to be absorbed [
18,
19].
A liquid crystal droplet’s orientation depends on the molecular alignment on its surface. The liquid crystal droplet forms a tangential orientation in pure water under the planar anchoring condition. In the absence of surfactants or any other external fields, a parallel alignment in which the director tends to be aligned tangentially to the droplet interface creates a bipolar configuration [
3]. A bipolar orientation is characterized by two defects, which are located at the end of the axis of symmetry at opposite points and are caused by tangential or planar anchoring within the droplet surface, as illustrated in
Figure 1a. Experimental studies have shown that thermotropic nematic liquid crystals dispersed in aqueous solutions respond to chemical analytes at the interface. By adsorbing surfactant or lipid at the interface, the planar preferred alignment of liquid crystal then changes to homotropic alignment. Adsorption of surfactants at the surface could cause anchoring transition or change in the easy axis [
20]. The droplet’s orientation transitions from a bipolar to a radial within the droplet, which changes the optical appearance [
7]. The radial configuration of the droplet exhibits the single-point defect at its center due to its perpendicular anchoring on the surface of the droplet, as illustrated in
Figure 1b.
The design of liquid crystal droplet biosensors has been studied based on configuration transitions corresponding to changes in anisotropic optical properties such as birefringence [
7,
21]. The optical patterns are created by the deformed liquid crystal system when light propagates through it. It provides a way to identify this transition from a bipolar to radial orientation in the sample. The bipolar liquid crystal microdroplets appear brightly in aqueous solutions. In contrast, the radial orientation has a dark texture with a cross-like pattern. Thus, this creates a unique optical response, which is then used to identify and quantify the presence of the biological agent. Previous experimental studies investigated the optical texture to understand the liquid crystal orientation within the droplets dispersed in the aqueous phase [
1,
4,
19]. Since the optical pattern of the liquid crystal biosensor can detect the presence and concentration of the biological analyte, the changes in the orientation can be used to study its performance [
22].
Studies in the past have shown that liquid crystal emulsions can detect the presence of a variety of target analysts. Several experimental studies show that liquid crystal emulsion droplets dispersed in an aqueous solution can be used as a sensing platform. For example, the orientational changes in the liquid crystal droplets from a tangential to perpendicular alignment due to the adsorption of surfactants at the aqueous interface could be the base of the surface-induced droplet biosensors [
22,
23]. A droplet’s configuration is significantly affected by its diameter. It is also affected by the surface’s physicochemical properties and temperature, whereas the orientation depends on the interfacial energies [
24]. Moreover, the configuration of liquid crystal droplets is greatly influenced by their size, and most preparation methods do not allow us to control the size of the droplets [
8,
25].
Although liquid crystal droplet systems can sense chemical and biological materials, this presents a different technical challenge, including inconsistency in the shape and size of the droplets as well as mobility through the aqueous medium that typically translates into a velocity of 1μm/s. Since dispersion droplets move freely within an aqueous solution, it is difficult to characterize the individual droplets using the optical method because it is difficult to obtain quantitative information about the liquid crystal orientation at the interface experimentally using the optical method. As one way to overcome this issue, researchers would immobilize liquid crystal droplets in an aqueous solution. For instance, adding glycerol to an aqueous phase increases the viscosity and decreases droplet motion. However, this affects the interfacial properties of the droplet, such as its surface viscosity [
4,
19,
26].
In the past, Kingister et. al. attempted to address this issue by immobilizing the liquid crystal droplets on chemically-tailored solid surfaces. However, they observed that the immobilization of the droplets disturbs the order of the liquid crystal within the droplet. They suggested that the immobilization of liquid crystal droplets lead to changes in the ordering of the liquid crystal that depend on the physicochemical properties of the surface [
18]. Miller et. al. also reported the challenge that increasing the viscosity of the aqueous phase will not only reduce droplet motion but also alter the surface properties of the liquid crystal droplet [
4].
As part of our study, we analyzed the sensitivity of the liquid crystal droplet biosensors and surface interactions as a result of biomolecular adsorption. Firstly, two dimensionless surface parameters were introduced to characterize the interface. Then, we manipulated the parameter related to interfacial properties to optimize the liquid crystal droplet biosensor performance. To do this, it was assumed that the easy axis will have a sudden transition from planar to homeotropic in the presence of sufficient surfactant concentration [
27]. Our second objective was to investigate the bulk orientational response to variations in surface viscosity without changing the easy axis, assuming weak planar anchoring energy at the surface of the droplet due to the presence of chemical analytes. Additionally, we examined how viscosity affects the droplet’s dynamics behavior and response time.
To investigate the effect of surface properties, we assumed that the obtainment of radial configurations of liquid crystal droplets was induced by perpendicular anchoring with the uniform microdroplet scale in addition to a constant temperature and uniform interface properties [
25,
28].
To our knowledge, the mathematical modeling and computer simulation of transient reorientation caused by interface interactions have not been extensively studied for emulsion liquid crystal biosensors. Numerical studies were found to be able to resolve some gaps relevant to surface viscosity, anchoring energy, and easy axis at the interfaces of the droplets during the biosensor application. In this study, a transient two-dimensional nonlinear model based on the Leslie–Ericksen theory on cylindrical coordinates is used to analyze the deformation of the liquid crystal droplets. Additionally, the Frank energy was incorporated into the governing equation to model the droplet and surface interaction. The model was then used to simulate the interaction between the droplet and the surface. The results of the simulation will help to understand the dynamics of the droplets and how the surface characteristics affect the droplet behavior during biosensor usage.
3. Results and Discussions
In this study, we examined the liquid crystal director configurations within a droplet in relation to changes in surface viscosity and interface anchoring energy. The adsorption of the surfactant was considered the driving force that triggered the realignment of the liquid crystal at the droplet surface, influenced by the surface properties. Therefore, this study is based on the adsorbate-induced bipolar to radial transition, and we assumed that the change in the anchoring transition was caused by amphiphilic adsorption [
40].
The anchoring energy of the liquid crystal at interfaces with aqueous solutions varies with the biomolecule concentration. The adsorption of biomolecules on the surface enhances homeotropic anchoring and causes the liquid crystal molecules to be rearranged to the radial configurations from the bipolar orientation within the droplet. Moreover, it was assumed in this study that the defect changes abruptly. Therefore, we did not consider other possible configurations of the liquid crystal droplets caused by defect migration. In addition, we assumed the sufficient surfactants at the liquid crystal aqueous interface caused the uniform transition from tangential to perpendicular anchoring [
6].
Since topological defects are governed by both surface and bulk elastic energies [
22,
41], we did not investigate whether the defects could cause droplet reorientation as reported by Lin [
18,
20]. As part of this parametric study, we kept the droplet size constant while focusing on the surface properties. The droplet diameter, however, is considered when defining the parameters in Equations (22) and (23).
Our study investigated the role of interface properties in droplet reorientation by evaluating the droplet deformation under different parameter combinations. A droplet’s deviation from the preferred alignment at the surface is determined by the anchoring energy at its interface. When the director is aligned with an easy axis, energy is at its minimum. Generally, when the anchoring strength is high, the director aligns with the surface alignment. However, when the
W is finite and reduced, the surface orientation is determined by minimizing the total energy, which is the balance between bulk and surface energy. With the help of this parametric study, we can investigate the interaction between the liquid crystals inside the droplets and the aqueous solution interface. In this discussion, we examined the effects of dimensionless surface viscosity and anchoring energy. A comparison was made between the numerical results and the experimental data that were available for validation [
4].
Figure 3 illustrates the initial conditions of the liquid crystal confined within a circular geometry, which was obtained via a mathematical model with fixed tangential boundary conditions representing to the strong planar anchoring in an aqueous solution as a result of a tangential easy axis. We used this obtained initial condition for all cases studied for our parametric studies.
The experimental results of the emulsion liquid crystal configuration in an aqueous solution in the absence of a surfactant or external field were assumed as the initial condition. In addition, we assumed that the droplet size favors a bipolar structure.
Considering the discussion above, the bipolar configuration exists due to the strong tangential anchoring at the surface. The adsorption or interaction of the surfactant or chemical analytes on the surface changes the anchoring energy and easy axis, leading to a realignment of the liquid crystal bulk within its spherical geometry.
The effect of the intermolecular interaction and absorption of chemical analytes at the surface of the liquid crystal droplets in relation to the liquid crystal inside the droplet is modeled using the Euler–Lagrange equation, which is based on the dissipation interaction between the surface and the bulk of the liquid crystal. The initial configuration of the liquid crystal emulsion is determined using the physicochemical properties of the droplet surface. Additionally, molecular interactions can explain director reorientation within the droplet.
To study the dynamics of the orientation of liquid crystal droplet biosensors, we introduced mean magnitude angle and characteristic time to investigate the performance of liquid crystal biosensors. The mean magnitude of the orientation angle
of the liquid crystal within the droplet is defined below:
The mean angle is the average of the angles within the two-dimensional droplet geometry.
In
Figure 4, a semilogarithmic plot of the magnitude of the mean polar orientation angle <||
ss||> at steady state conditions relative to homeotropic anchoring strength at different surface viscosity parameters is shown. The data pattern shows a sigmoidal trend as
W increases. As homeotropic anchoring increases, the result of a sigmoidal trend indicates a slow steady decline in the mean angle at steady state, which is consistent with the definition of homeotropic anchoring energy mentioned above. This suggests that the increase in homeotropic anchoring strength is correlated with the decrease in the mean angle at a steady state. Additionally, it shows that the mean angle within the range of 10
−2 <
W < 10
2 differs with surface viscosity. Thus, the results demonstrate that the surface viscosity parameter has a significant impact on the mean polar orientation angle. The results indicate the orientation of the liquid crystal is interrelated with both surface viscosity and homeotropic anchoring energy.
As shown in
Figure 5, three case studies illustrate bulk reorientation at a steady state caused by adding surfactants at the liquid crystal droplet aqueous interface. Increasing anchoring energy tends to align the surface director with the surface perpendicular alignment. It has already been mentioned that surfactant concentration at the interface impacts homeotropic anchoring strength. Increasing the concentration of surfactants causes greater anchoring energy, causing the surface director to become even more aligned with the surface perpendicular alignment.
Furthermore, the mean angle transmitted to the radial configuration is not linear for W ≤ 10. However, the mean angle <||ss||> at steady state is constant for W ≥ 10 and for the surface viscosity λs* ≤ 102. Furthermore, <||ss||> is constant for higher viscosity with higher homeotropic anchoring in the range of 10 ≤ W ≤ 102 with a surface viscosity of 102 < λs* ≤ 103, as depicted in the plot. Thus, for the mentioned ranges, the mean angle transmitted to the radial configuration is linear. This suggests that to fully obtain the radial orientation of the surface viscosity, W should be kept within the recommended ranges for the best results during the biosensor performance. Thus, the distinctive optical textures corresponding to different liquid crystal orientations in this range can be observed under a polarized microscope.
Moreover, the mean angle decreases with the increasing homeotropic anchoring and the decreasing surface viscosity. Therefore, by examining the higher viscosity λs* > 103, the W = 102 is sufficient to obtain a complete dark appearance with a cross-like texture during the biosensor performance, which represents the radial configuration.
Since the mean angle gradually decreases, a relaxation characteristic time was defined as used in our past papers [
39,
42]. The time constant is defined as 36.78 percent of the declining process to investigate the temporal average orientation within the droplet. This process is used to measure how fast the droplet reorients towards the radial configuration.
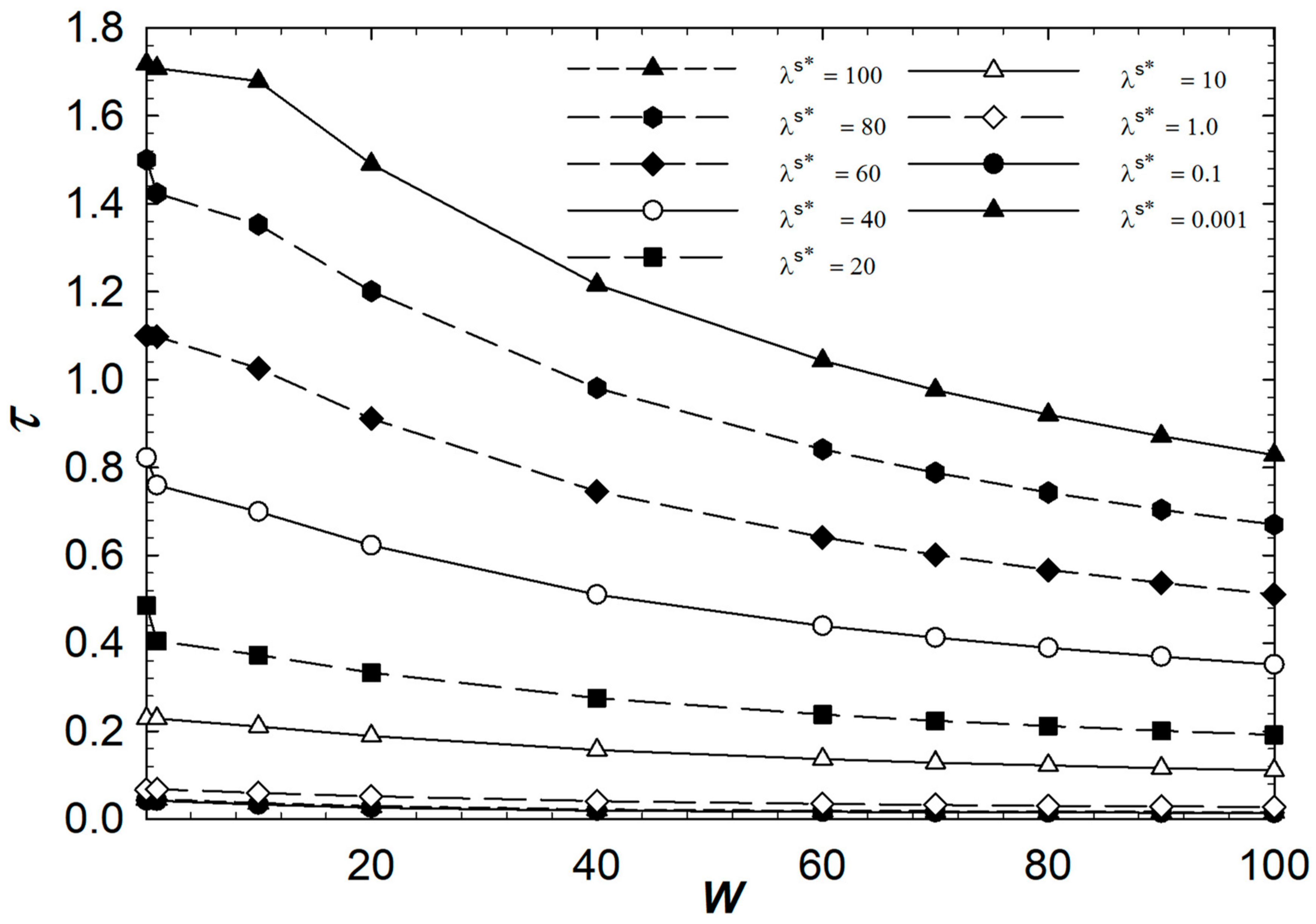
Figure 6 shows the relation between
τ and
W on a linear scale. The plot shows the downward trend of characteristic time versus
W for different surface viscosity
λs* values. The overall trend of
τ follows the sigmoidal pattern as
W increases. The plot depicted that τ gradually decreases as
W increases with the sigmoidal trend in the range of 10
−2 <
λs* ≤ 10
2. The decrease in
τ is steeper in the range of 50 <
λs* ≤ 10
2 and
τ is almost constant in the range of
λs* ≤ 1. The minimum value of
τ is obtained at
λs* ≤ 1. Also, in this range, the relation of
τ and
W is linear. This suggests that the maximum efficiency of the system is achieved for higher values of
W and lower values of
λs*. This suggests that the system can be improved by adjusting these parameters according to the desired performance. Tuning these parameters can help in achieving the desired performance of the system. The results show that the radial configuration and anchoring energy are related and depend on the surface viscosity.
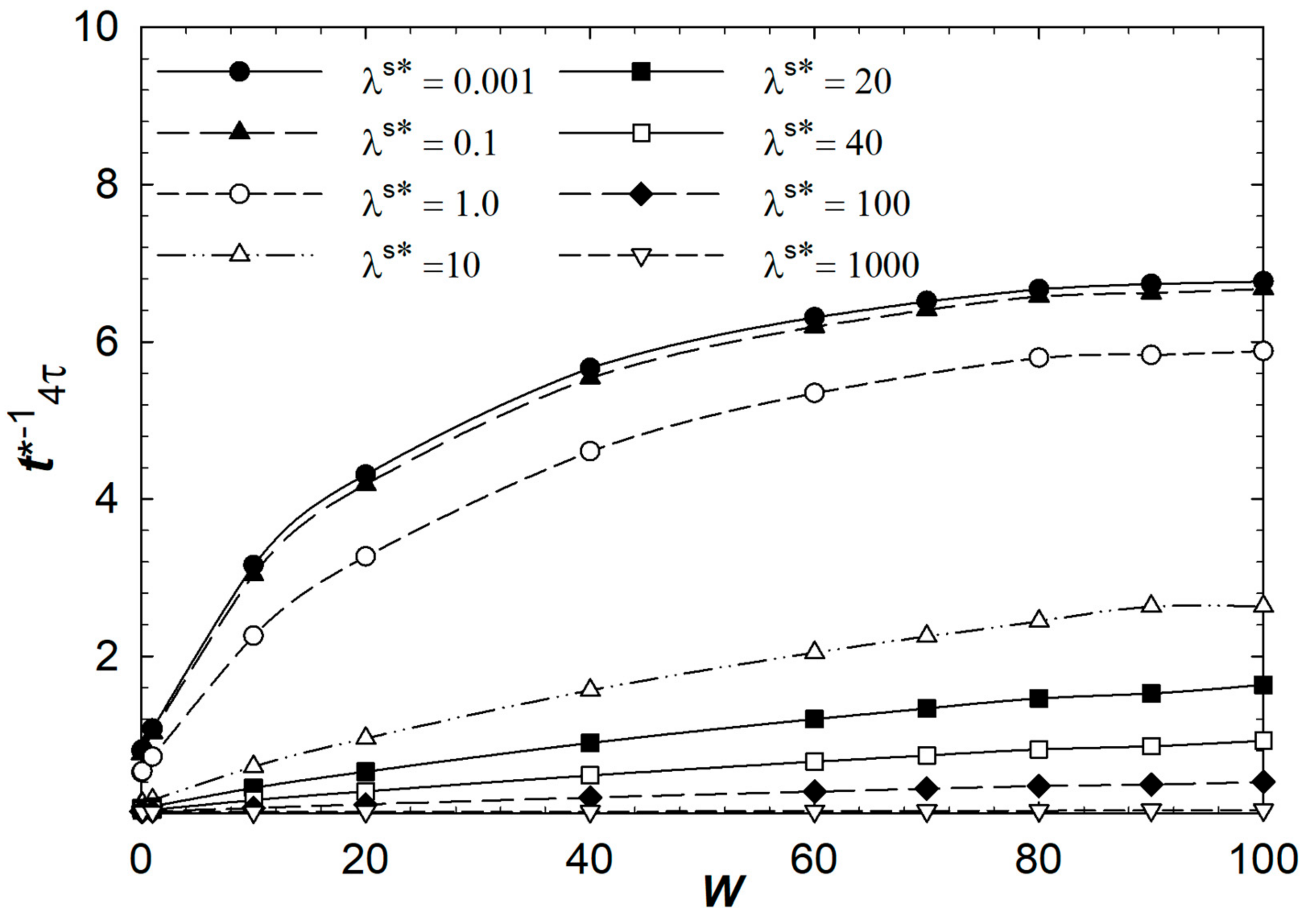
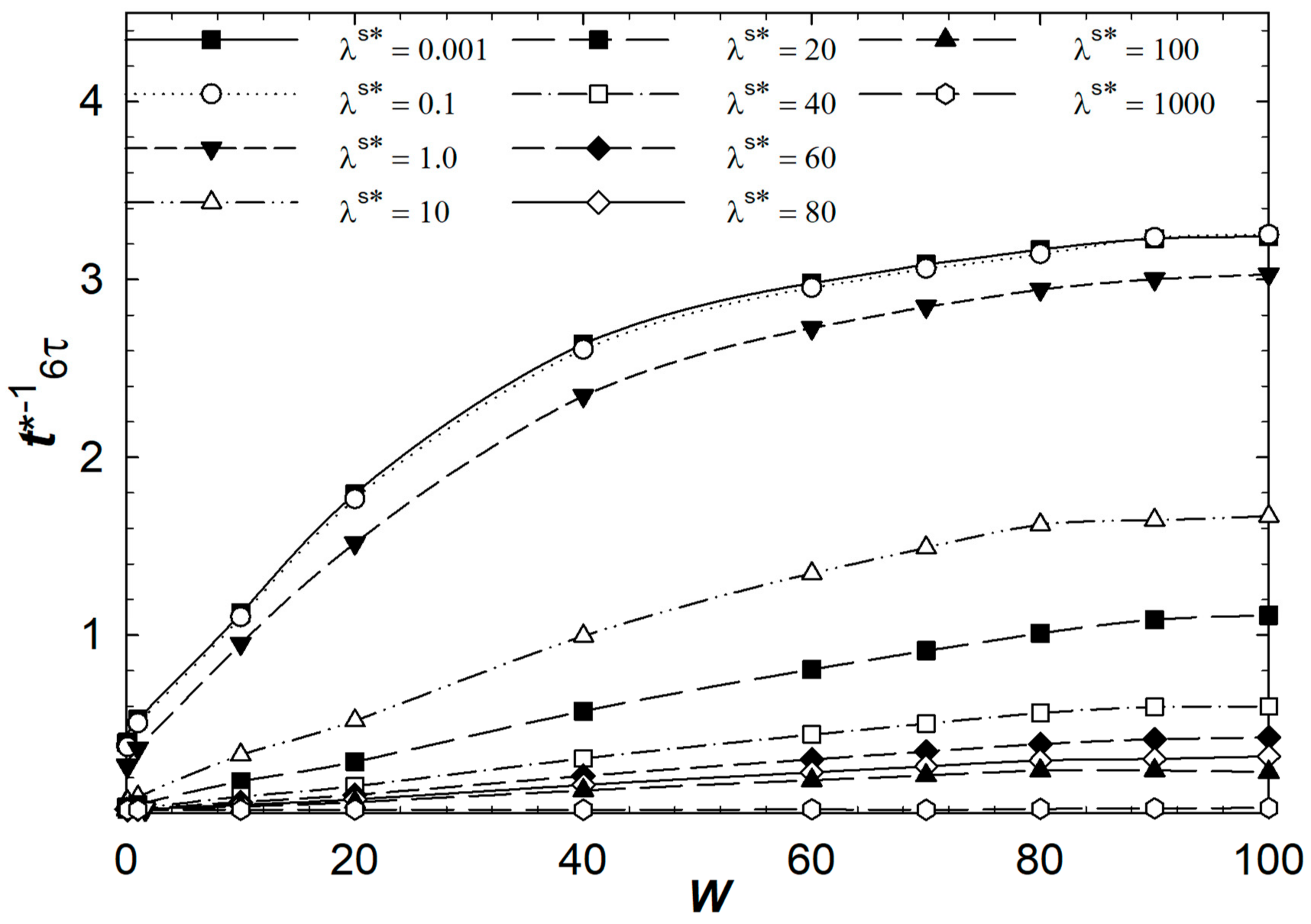
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11 illustrate the reciprocal time at 2
τ to 6
τ of the process in relation to the homeotropic anchoring. The plots indicate that the system responds differently at each characteristic time depending on the surface viscosity. The system reaches the steady state condition after seven characteristic times as per the simulation. Therefore, the reciprocal time curves indicate how fast the system responds to the changes in the droplet’s surface realignment. In addition, analyzing the relation between the radial configuration and anchoring energy helps us to understand how the system responds to the surface interaction. It shows the relationship between these two variables and how they affect the overall performance of the system.
According to
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11, the low surface viscosity parameter in the range of 10
−3 ≤
λs* ≤ 10
−1 has a reasonably similar and consistent gradual increase pattern through time. This suggests that the viscosity is already at its optimum level and no further decrease is required. However,
λs* ≥ 10 has a reasonable linear relationship with
W, where the trend switches to gradual changes over time as shown through these figures. For
λs* ≥ 10
2, the relation with
W stays linear until the steady state condition is reached. Additionally, it depicts that there is a wide range of changes between 1 <
λs* < 10. Furthermore, it was predicted that the process with a range of 10
−2 <
λs* ≤ 10
0 exhibits a trend similar to the low surface viscosity through time.
By changing the surface viscosity at the surface, we investigated how changing the aqueous solution viscosity could affect the liquid crystal biosensor performance. In this study, we assume the easy axis is planar and manipulate the surface viscosity to study the system response.
Figure 12 shows a plot of the orientation angle at steady state conditions at weak planar anchoring to study the effect of changing the viscosity of the aqueous solution which could affect the liquid crystal surface and then the bulk orientation. It shows that the average angle orientation of the liquid crystal within the droplet has two exponential trends in the range of 10
−4 <
λs* ≤ 10
4. As depicted in the range of 10
−4 <
λs* ≤ 10
3, it shows gradual increases in the average angle versus the surface viscosity, and for
λs* ≤ 6 × 10
2, the average angle stays linear in relation to the surface viscosity and is reasonably constant, and interference at the steady state does not vary with the surface viscosity within this range. The biosensor performance is affected by the droplet’s surface viscosity during the transient process. Consequently, a higher surface viscosity leads to brighter optical interference at steady state conditions.
Figure 13 illustrates three case studies involving droplet bulk orientation that result in different dimensionless surface viscosities.
The graph in
Figure 14 shows dimensionless total distortion energy versus
λs*, which corresponds to the result in
Figure 12. The equilibrium of a liquid crystal biosensor droplet is obtained by minimizing the total free energy density. The energy is minimized in the droplet system when the director aligns with the preferred direction and obtains the radial configuration. The results demonstrate the impact of surface viscosity compared to bulk rotational viscosity due to the surface interaction. The graph indicates that the system reaches the minimum energy when the surface viscosity parameter is low; however, when the surface viscosity increases, Frank’s energy level also increases at steady state conditions. Accordingly, the radial configuration can be predicted via minimizing the elastic energy associated with liquid crystal distortion within the droplet caused by chemical analyte interactions. Thus, the sensitivity of a biosensor or the order transition of a biosensor can be controlled by lowering the elastic energy of the system.
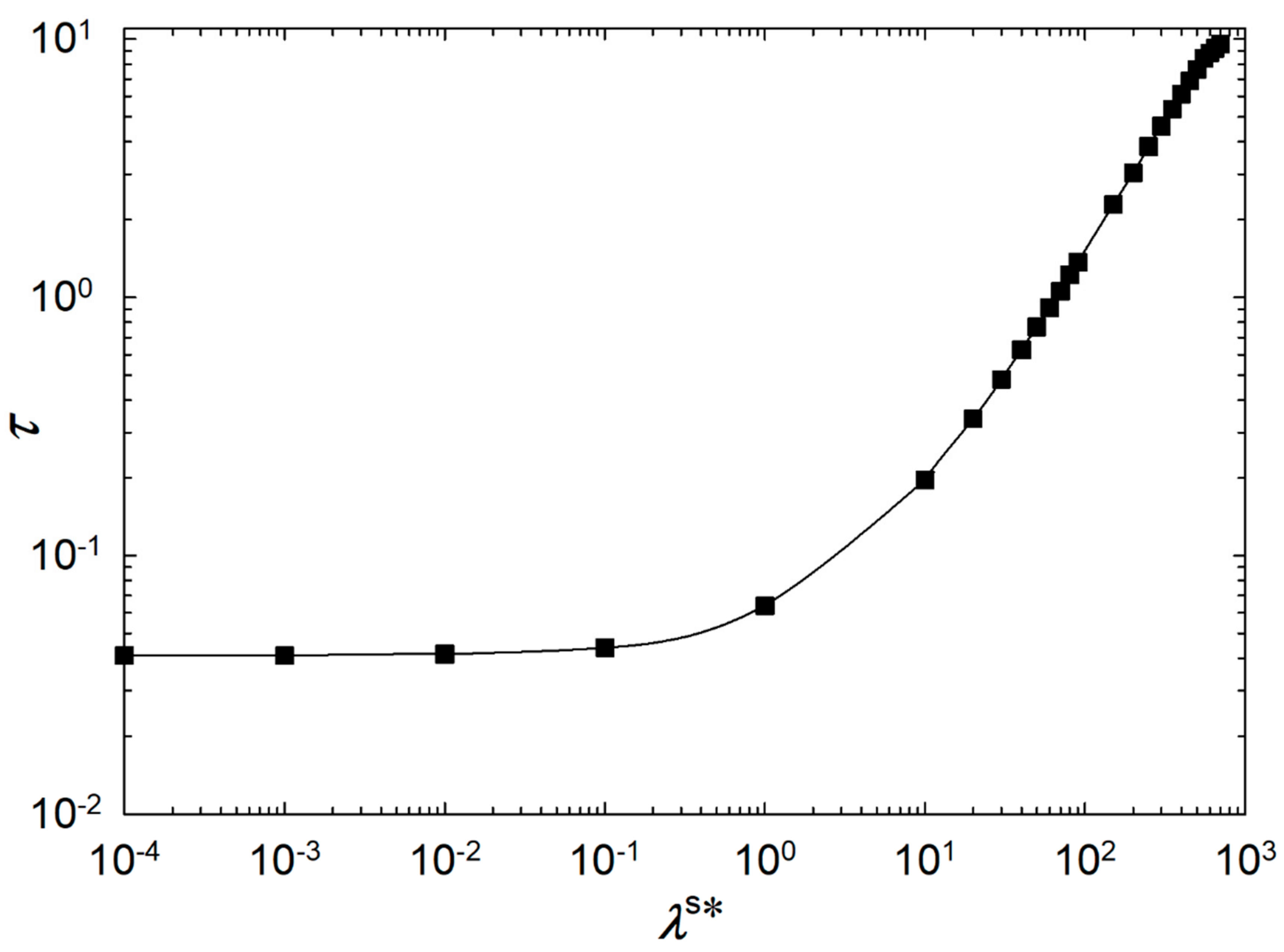
Figure 15 shows the relationship between
τ and
λs* on a logarithmic scale in the range of 10
−4 ≤
λs* ≤ 10
3.
τ has a reasonably linear relationship with 10
−3 ≤
λs* ≤ 10
0. It shows in
λs* ≤ 10
0 that
τ is independent of the surface viscosity at a low surface viscosity in the case of weak planar anchoring. It shows in
λs* ≥ 10
0 that
τ increases gradually with an increasing
λs*. Therefore, the higher the viscosity, the slower the response time of the biosensor droplet to the adsorption of biomolecules.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














