
A Review of Fingerprint Sensors: Mechanism, Characteristics, and Applications

Abstract
:1. Introduction
2. Biometric Recognition Mechanism
2.1. Iris Recognition
2.2. Facial Recognition
2.3. Finger Vein Recognition
2.4. Voice Recognition
2.5. Fingerprint Recognition
3. Optical Fingerprint Recognition
3.1. Single Prism Recognition Method
3.2. Identification Method through TFT Technology
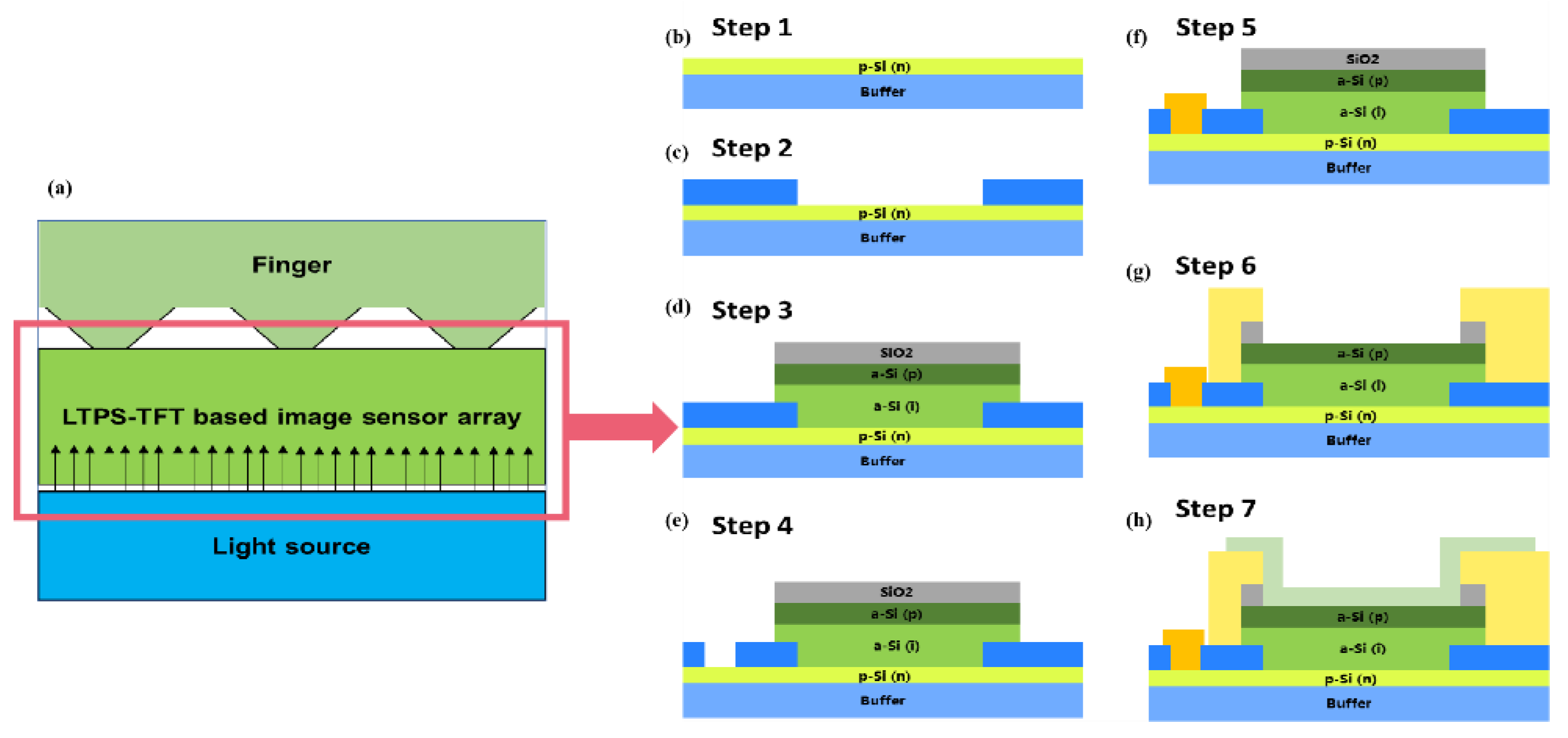
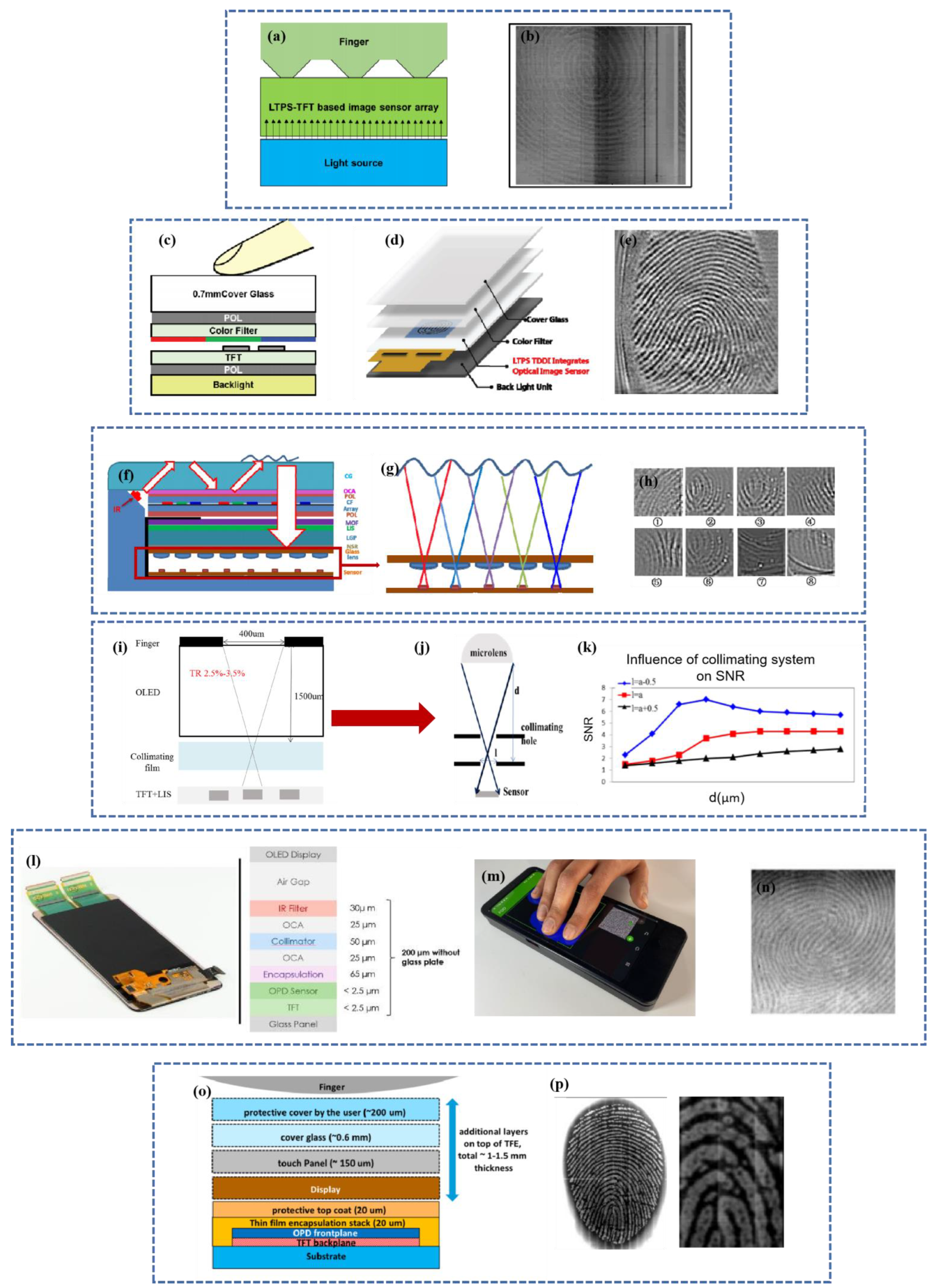
3.2.1. Based on Amorphous Silicon TFT Technology
3.2.2. Based on Polycrystalline Silicon TFT Technology
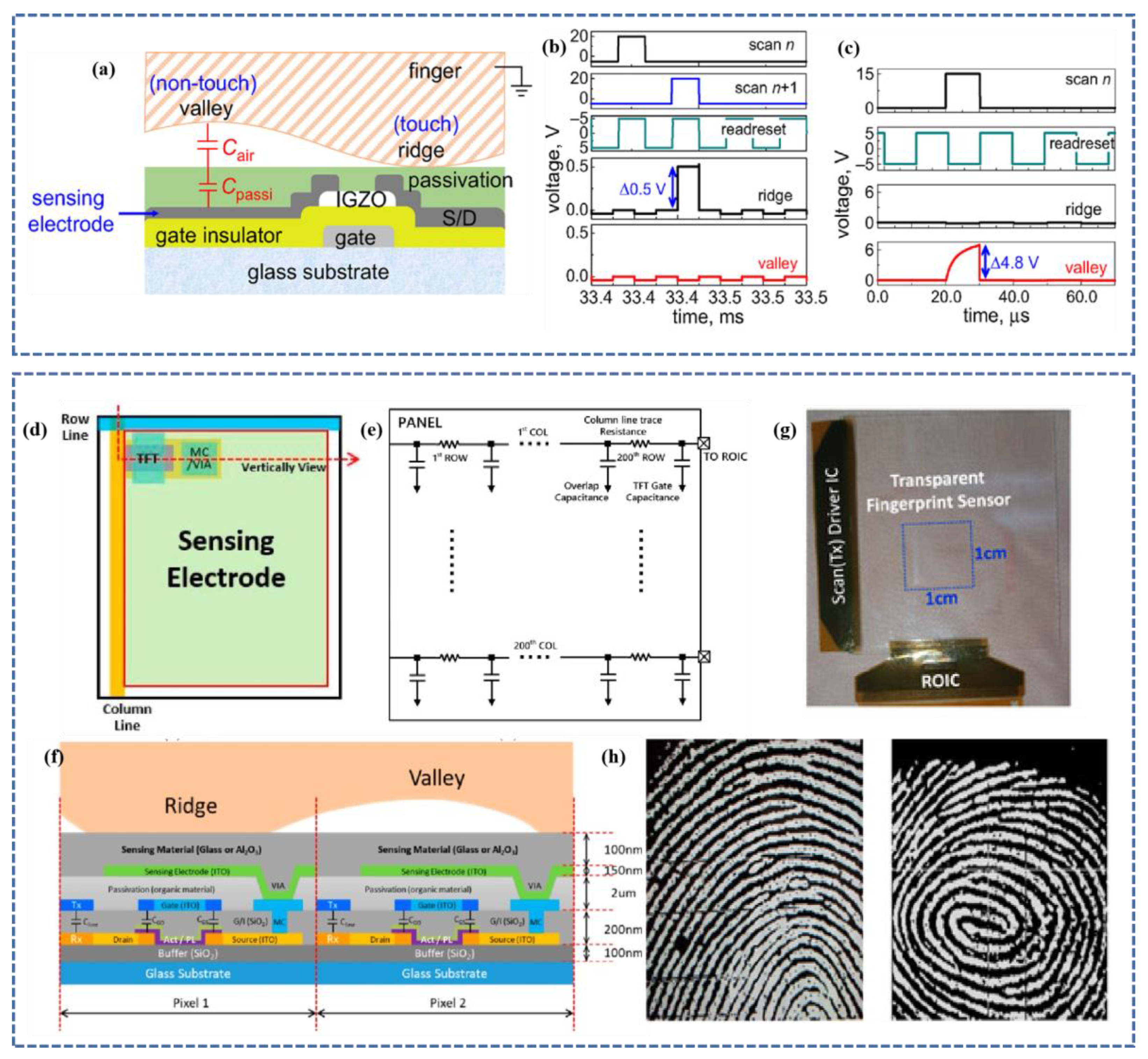
3.2.3. Oxide TFT-Based Technology
3.2.4. Organic TFT
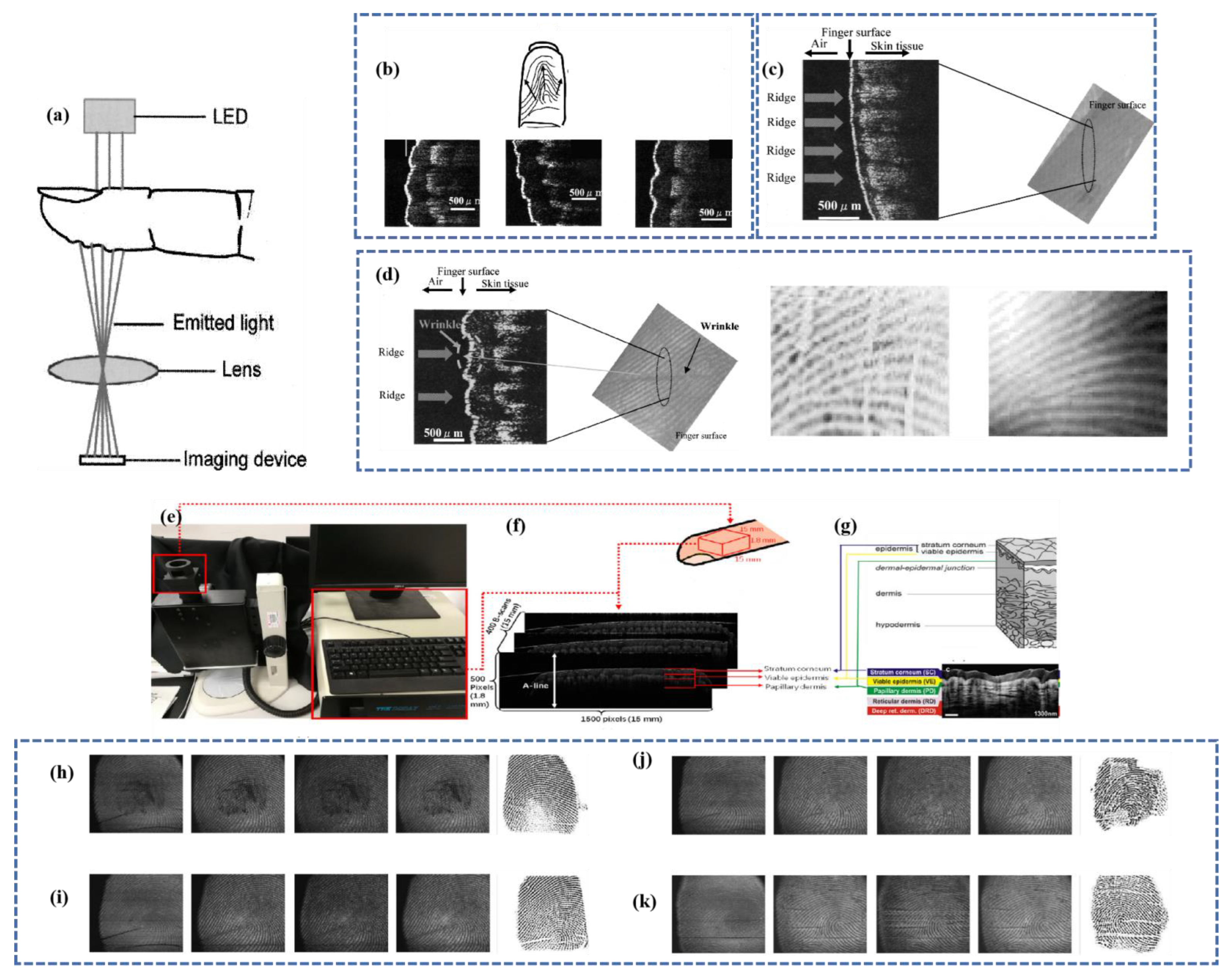
3.3. Identification Method by Optical Coherent Layer Scanning Technology
4. Capacitive Fingerprint Recognition
4.1. Fingerprint Sensor Based on Self-Capacitance
4.2. Fingerprint Sensor Based on Mutual Capacitance
5. Ultrasonic Fingerprint Recognition
5.1. Fingerprint Sensor Based on Capacitive Ultrasonic Transducer
5.2. Manufacture of Capacitive Ultrasonic Transducer
5.3. Fingerprint Sensor Based on Piezoelectric Ultrasonic Transducer
5.4. Fingerprint Sensors Based on Other Sensors
5.5. Manufactur of Piezoelectric Ultrasonic Transducer
6. Conclusions
- The accuracy of the algorithm is not sufficient to prevent recognition errors due to the proximity of fingerprints between relatives and needs to be improved;
- The fingerprint information left when touching an object is easily accessible, and the security is poor. Therefore, the detection of location authenticity must be enhanced to prevent the harmful effects of fingerprint theft;
- With the emergence of wearable devices such as mobile fingerprint unlock bracelets and car fingerprint locks, the integration of fingerprint recognition technology into flexible wearable devices has become a major challenge, which will drive the development of small, ultra-thin fingerprint capture chips;
- Fingerprint capture is easily affected by posture and angle, and the problem of finger pressure can be solved using a contactless fingerprint sensor.
Author Contributions
Funding
Conflicts of Interest
References
- Pearson, H. Stats say aye to ID eye. Nature 2001. [Google Scholar] [CrossRef]
- Lei, S.; Dong, B.; Li, Y.; Xiao, F.; Tian, F. Iris recognition based on few-shot learning. Comput. Animat. Virtual Worlds 2021, 32, e2018. [Google Scholar] [CrossRef]
- Zanlorensi, L.; Laroca, R.; Lucio, D.; Santos, L.; Britto, A.; Menotti, D. A new periocular dataset collected by mobile devices in unconstrained scenarios. Sci. Rep. 2020, 12, 17989. [Google Scholar] [CrossRef] [PubMed]
- Krumhuber, E.; Skora, L.; Hill, H.; Lander, K. The role of facial movements in emotion recognition. Nat. Rev. Psychol. 2023, 2, 283–296. [Google Scholar] [CrossRef]
- Yang, Q.; Jin, W.; Zhang, Q.; Wei, Y.; Guo, Z.; Li, X.; Yang, Y.; Luo, Q.; Tian, H.; Ren, T. Mixed-modality speech recognition and interaction using a wearable artificial throat. Nat. Mach. Intell. 2023, 5, 169–180. [Google Scholar] [CrossRef]
- Conti, V.; Rundo, L.; Militello, C.; Salerno, V.; Vitabile, S.; Siniscalchi, S. A multimodal retina-iris biometric system using the Levenshtein distance for spatial feature comparison. IET Biom. 2021, 10, 44–64. [Google Scholar] [CrossRef]
- Shao, H.; Zhong, D. Few-shot palmprint recognition via graph neural networks. Electron. Lett. 2019, 55, 890–892. [Google Scholar] [CrossRef]
- El Idrissi, A.; El Merabet, Y.; Ruichek, Y. Palmprint recognition using state-of-the-art local texture descriptors: A comparative study. IET Biom. 2020, 9, 143–153. [Google Scholar] [CrossRef]
- Anonymous. Sweat-pore fingerprint. Nature 2014, 509, 136. [Google Scholar] [CrossRef] [Green Version]
- Kalisky, T.; Saggese, S.; Zhao, Y.; Johnson, D.; Azarova, M.; Duarte-Vera, L.; Almada-Salazar, L.; Perales-Gonzalez, D.; Chacon-Cruz, E.; Wang, J.; et al. Biometric recognition of newborns and young children for vaccinations and health care: A non-randomized prospective clinical trial. Sci. Rep. 2022, 12, 22520. [Google Scholar] [CrossRef]
- Ong, T.; Teoh, A.; Ngo, D. Application-Specific Key Release Scheme from Biometrics. Int. J. Netw. Secur. 2008, 6, 127–133. [Google Scholar]
- Singla, N.; Kaur, M.; Sofat, S. Automated latent fingerprint identification system: A review. Forensic Sci. Int. 2020, 309, 110187. [Google Scholar] [CrossRef] [PubMed]
- Glover, J.; Sudderick, Z.; Shih, B.; Batho-Samblas, C.; Charlton, L.; Krause, A.; Anderson, C.; Riddell, J.; Balic, A.; Li, J.; et al. The developmental basis of fingerprint pattern formation and variation. Cell 2023, 5, 940–956. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Glover, J.; Zhang, H.; Peng, M.; Tan, J.; Mallick, C.; Hou, D.; Yang, Y.; Wu, S.; Liu, Y.; et al. Limb development genes underlie variation in human fingerprint patterns. Cell 2022, 185, 95–112. [Google Scholar] [CrossRef]
- Han, J.; Tan, Z.; Sato, K.; Shikida, M. Thermal characterization of micro heater arrays on a polyimide film substrate for fingerprint sensing applications. J. Micromech. Microeng. 2005, 15, 282–289. [Google Scholar] [CrossRef]
- Ifa, D.; Manicke, N.; Dill, A.L.; Cooks, R. Latent fingerprint chemical imaging by mass spectrometry. Science 2008, 321, 805. [Google Scholar] [CrossRef] [Green Version]
- Fang, K.; Wang, T.; Yuan, X.; Miao, C.; Pan, Y.; Li, J. Detection of weak electromagnetic interference attacks based on fingerprint in IIoT systems. Future Gener. Comput. Syst. 2022, 126, 295–304. [Google Scholar] [CrossRef]
- Jung, H.; Sim, S.; Lee, H. Biometric authentication security enhancement under quantum dot light-emitting diode display via fingerprint imaging and temperature sensing. Sci. Rep. 2023, 13, 794. [Google Scholar] [CrossRef]
- Matyas, V.; Riha, Z. Toward reliable user authentication through biometrics. IEEE Secur. Priv. 2003, 1, 45–49. [Google Scholar] [CrossRef]
- Wang, H.; Hong, S.; Han, J.; Jung, Y.; Jeong, H.; Im, T.; Jeong, C.; Lee, B.; Kim, G.; Yoo, C.; et al. Biomimetic and flexible piezoelectric mobile acoustic sensors with multiresonant ultrathin structures for machine learning biometrics. Sci. Adv. 2021, 7, eabe5683. [Google Scholar] [CrossRef]
- Jain, A.; Ross, A.; Uludag, U. Biometric template security: Challenges and solutions. In Proceedings of the 2005 13th European Signal Processing Conference, Antalya, Turkey, 4–8 September 2005; pp. 1–4. [Google Scholar]
- North-Samardzic, A. Biometric technology and ethics: Beyond security applications. J. Bus. Ethics 2020, 167, 433–450. [Google Scholar] [CrossRef]
- Chebotareva, A.; Chebotarev, V. Hardware, Biometric and passwordless authentication: Vulnerability and cybercrime issues. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1069, 012035–012038. [Google Scholar] [CrossRef]
- El-Wahab, B.; El-Khobby, H.; Abd-Elnaby, M.; El-Samie, F. A cancelable biometric approach for efficient identification of speakers from encrypted speech. Wirless Pers. Commun. 2022, 124, 1899–1921. [Google Scholar] [CrossRef]
- Sun, J.; Zhao, S.; Miao, S.; Wang, X.; Yu, Y. Open-set iris recognition based on deep learning. IET Image Process. 2022, 16, 2361–2372. [Google Scholar] [CrossRef]
- Annaswamy, T.; Pradhan, G.; Chakka, K.; Khargonkar, N.; Borresen, A.; Prabhakaran, B. Using biometric technology for telehealth and telerehabilitation. Phys. Med. Rehabil. Clin. N. Am. 2021, 32, 437–449. [Google Scholar] [CrossRef] [PubMed]
- Tanwar, S.; Tyagi, S.; Kumar, N.; Obaidat, M. Ethical, legal, and social implications of biometric technologies. In Biometric-Based Physical and Cybersecurity Systems; Springer: Cham, Switzerland, 2019; pp. 535–569. [Google Scholar]
- Jamaludin, S.; Ayob, A.; Akhbar, M.; Ali, A.; Imran, M.; Norzeli, S.; Mohamed, S. Efficient, accurate and fast pupil segmentation for pupillary boundary in iris recognition. Adv. Eng. Softw. 2023, 175, 103352. [Google Scholar] [CrossRef]
- Daugman, J. Recognizing people by their iris patterns. Inf. Secur. Tech. Rep. 1998, 3, 33–39. [Google Scholar] [CrossRef]
- Trokielewicz, M.; Czajka, A.; Maciejewicz, P. Iris recognition after death. IEEE Trans. Inf. Secur. 2019, 14, 1501–1514. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Jung, Y.; Toh, K.; Son, B.; Kim, J. An empirical study on iris recognition in a mobile phone. Expert Syst. Appl. 2016, 54, 328–339. [Google Scholar] [CrossRef]
- Zadnik, D.; Zemva, A. Image acquisition device for smart-city access control applications based on iris recognition. Sensors 2021, 21, 6185. [Google Scholar] [CrossRef]
- Malgheet, J.; Manshor, N.; Affendey, L. Iris recognition development techniques: A comprehensive review. Complexity 2021, 2021, 6641247. [Google Scholar] [CrossRef]
- Wang, K.; Kumar, A. Cross-spectral iris recognition using CNN and supervised discrete hashing. Pattern Recognit. 2019, 86, 85–98. [Google Scholar] [CrossRef]
- Wei, J.; Wang, Y.; Li, Y.; He, R.; Sun, Z. Cross-spectral iris recodnition by learning device-specific band. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 3810–3824. [Google Scholar] [CrossRef]
- Fourati, E.; Elloumi, W.; Chetouani, A. Anti-spoofing in face recognition-based biometric authentication using image quality assessment. Multimed. Tools Appl. 2019, 79, 865–889. [Google Scholar] [CrossRef]
- Afaneh, A.; Noroozi, F.; Toygar, O. Recognition of identical twins using fusion of various facial feature extractors. Eurasip J. Image Video Process. 2017, 81, 1–14. [Google Scholar] [CrossRef]
- Kute, R.; Vyas, V.; Anuse, A. Component-based face recognition under transfer learning for forensic applications. Inf. Sci. 2019, 476, 176–191. [Google Scholar] [CrossRef]
- Zeng, D.; Veldhuis, R.; Spreeuwers, L.; Arendsen, R. Occlusion-invariant face recognition using simultaneous segmentation. IET Biom. 2021, 10, 679–691. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, X.; Cheng, Z.; Shen, X. A face recognition algorithm based on feature fusion. Concurr. Comput. Pract. Exp. 2020, 34, e5748. [Google Scholar] [CrossRef]
- Madarkar, J.; Sharma, P. Occluded face recognition using NonCoherent dictionary. J. Intell. Fuzzy Syst. 2020, 38, 6423–6435. [Google Scholar] [CrossRef]
- Mehrabian, A. Communication without Words; Taylor and Fracis Group: Abingdon, UK, 1968. [Google Scholar]
- Takalkar, M.; Xu, M.; Wu, Q.; Chaczko, Z. A survey: Facial micro-expression recognition. Multimed. Tools Appl. 2018, 77, 19301–19325. [Google Scholar] [CrossRef]
- Wohlgenannt, I.; Simons, A.; Stieglitz, S. Virtual reality. Bus. Inf. Syst. Eng. 2020, 62, 455–461. [Google Scholar] [CrossRef]
- Haldorai, A.; Murugan, S.; Ramu, A. Evolution, challenges, and application of intelligent ICT education: An overview. Comput. Appl. Eng. Educ. 2021, 29, 562–571. [Google Scholar] [CrossRef]
- Rajan, S.; Chenniappan, P.; Devaraj, S.; Madian, N. Facial expression recognition techniques: A comprehensive survey. IET Image Process. 2019, 13, 1031–1040. [Google Scholar] [CrossRef]
- Adyapada, R.; Annappa, B. A comprehensive review of facial expression recognition techniques. Multimed. Syst. 2023, 29, 73–103. [Google Scholar] [CrossRef]
- Wu, F.; Pang, C.; Zhang, B. FaceCaps for facial expression recognition. Comput. Anim. Virtual Worlds 2021, 32, e2021. [Google Scholar] [CrossRef]
- Guo, S.; Pang, M.; Gao, B.; Hirata, H.; Ishihara, H. Comparison of sEMG-Based feature extraction and motion classification methods for upper-limb movement. Sensors 2015, 15, 9022–9038. [Google Scholar] [CrossRef]
- Cha, H.; Choi, S.; Im, C. Real-time recognition of facial expressions using facial electromyograms recorded around the eyes for social virtual reality applications. IEEE Access 2020, 8, 62065–62075. [Google Scholar] [CrossRef]
- Ma, B.; Wang, K.; Hu, Y. Finger vein recognition based on bilinear fusion of multiscale features. Sci. Rep. 2023, 13, 249. [Google Scholar] [CrossRef]
- Miura, N.; Nagasaka, A.; Miyatake, T. Feature extraction of finger-vein patterns based on repeated line tracking and its application to personal identification. Mach. Vis. Appl. 2004, 15, 194–203. [Google Scholar] [CrossRef]
- Shaheed, K.; Liu, H.; Yang, G.; Qureshi, I.; Gou, J.; Yin, Y. A systematic review of finger vein recognition techniques. Information 2018, 9, 213. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Shi, Y.; Jia, G. Finger-vein image matching based on adaptive curve transformation. Pattren Recognit. 2017, 66, 34–43. [Google Scholar] [CrossRef]
- Prommegger, B.; Uhl, A. A fully rotation invariant multi-camera finger vein recognition system. IET Biom. 2021, 10, 275–289. [Google Scholar] [CrossRef]
- Immanuel, D.J.; Dhanapal, R. A secure finger vein verification and authentication scheme for banking network. Conurrency Comput. Pract. Exp. 2022, 34, e7281. [Google Scholar]
- Su, K.; Yang, G.; Wu, B.; Yang, L.; Li, D.; Su, P.; Yin, Y. Human identification using finger vein and ECG signals. Neurocomputing 2019, 332, 111–118. [Google Scholar] [CrossRef]
- Yang, W.; Wang, S.; Hu, J.; Zheng, G.; Chaudhry, J.; Adi, E.; Valli, C. Securing mobile healthcare data: A smart card based cancelable finger-vein bio-cryptosystem. IEEE Access 2018, 6, 36939–36947. [Google Scholar] [CrossRef]
- Sharan, R.; Moir, T. An overview of applications and advancements in automatic sound recognition. Neurocoputing 2016, 200, 22–34. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Chang, S.; Wang, C.; Li, K.; Cho, H.; Chen, Y.; Lu, C.; Tsai, T.; Lee, O. Deep learning application for vocal fold disease prediction through voice recognition: Preliminary development study. J. Med. Internet Res. 2021, 23, e25247. [Google Scholar] [CrossRef]
- Wijers, M.; Trethowan, P.; Du Preez, B.; Chamaille-Jammes, S.; Loveridge, A.; Macdonald, D.; Markham, A. Vocal discrimination of African lions and its potential for collar-free tracking. Bioacoustics 2021, 30, 575–593. [Google Scholar] [CrossRef]
- Nakamura, E.; Kageyama, Y.; Hirose, S. LSTM-based japanese speaker identification using an omnidirectional camera and voice information. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 674–684. [Google Scholar] [CrossRef]
- Beritelli, F.; Spadaccini, A. Human identity verification based on Mel frequency analysis of digital heart sounds. In Proceedings of the 2009 16th International Conference on Digital Signal Processing, Santorini, Greece, 5–7 July 2009; pp. 1–5. [Google Scholar]
- Van De Ville, D.; Farouj, Y.; Preti, M.; Liégeois, R.; Amico, E. When makes you unique: Temporality of the human brain fingerprint. Sci. Adv. 2021, 7, eabj0751. [Google Scholar] [CrossRef]
- Ashbaugh, D. Quantitative-Qualitative Friction Ridge Analysis: An Introduction to Basic and Advanced Ridgeology; Taylor and Fracis Group: Abingdon, UK, 1999. [Google Scholar]
- Jain, A.; Chen, Y.; Demirkus, M. Pores and ridges: High-resolution fingerprint matching using Level 3 features. IEEE Transations Pattern Anal. Mach. Intell. 2007, 29, 15–27. [Google Scholar] [CrossRef] [PubMed]
- Baldini, G.; Steri, G. A Survey of Techniques for the Identification of Mobile Phones Using the Physical Fingerprints of the Built-In Components. IEEE Commun. Surv. Tutor. 2017, 19, 1761–1789. [Google Scholar] [CrossRef]
- Muchtar, M.A.; Arisandi, D.; Hasanah, S. Attendance fingerprint identification system using arduino and single board computer. J. Phys. Conf. Ser. 2018, 978, 012060. [Google Scholar] [CrossRef]
- Conti, V.; Militello, C.; Sorbello, F.; Vitabile, S. A multimodal technique for an embedded fingerprint recognizer in mobile payment systems. Mob. Inf. Syst. 2009, 5, 105–124. [Google Scholar] [CrossRef]
- Shufen, H.; Fukang, Q.; Tugui, W. Design of a multifunctional entrance guard system using GSM and fingerprint identification. J. Phys. Conf. Ser. 2020, 1550, 042065. [Google Scholar] [CrossRef]
- Zhong, J.; Yang, C.; Xu, X.; Bao, W.; Guo, J. Accurate locating and recognizing of ID card information. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2250021:1–2250021:21. [Google Scholar] [CrossRef]
- Baskar, M.; Renuka Devi, R.; Ramkumar, J.; Kalyanasundaram, P.; Suchithra, M.; Amutha, B. Region centric minutiae propagation measure orient forgery letection with finger print analysis in health care systems. Neural Process. Lett. 2022, 55, 19–31. [Google Scholar] [CrossRef]
- Nguyen, L.; Nguyen, H.; Afanasiev, A.; Nguyen, T. Automatic identification fingerprint based on machine learning method. J. Oper. Res. Soc. China 2021, 10, 849–860. [Google Scholar] [CrossRef]
- Das, A.; Galdi, C.; Han, H.; Ramachandra, R.; Dugelay, J.; Dantcheva, A. Recent advances in biometric technology for mobile devices. In Proceedings of the 2018 IEEE 9th International Conference on Biometrics Theory, Applications and Systems (BTAS), Redondo Beach, CA, USA, 22–25 October 2018; pp. 1–11. [Google Scholar]
- Abe, H. Device technologies for high quality and smaller pixel in CCD and CMOS image sensors. In Proceedings of the 50th IEEE International Electron Devices Meeting, San Francisco, CA, USA, 13–15 December 2004; pp. 989–992. [Google Scholar]
- Mehta, S.; Patel, A.; Mehta, J. CCD or CMOS image sensor for photography. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015; pp. 0291–0294. [Google Scholar]
- Zhang, L.; Li, J.; Lin, L.; Du, Y.; Jin, Y. The key technology and research progress of CMOS image sensor. In Proceedings of the International Conference on Optical Instruments and Technology: Advanced Sensor Technologies and Applications, Beijing, China, 2 February 2009; Volume 7157. [Google Scholar]
- Blanc, N. CCD versus CMOS—Has CCD Imaging Come to an End? Wichmann Verlag: Heidelberg, Germany, 2001. [Google Scholar]
- Guidash, R.; Lee, T.; Lee, P.; Sackett, D.; Drowley, C.; Swenson, M.; Arbaugh, L.; Hollstein, R.; Shapiro, F.; Domer, S. A 0.6 /spl mu/m CMOS pinned photodiode color imager technology. In Proceedings of the International Electron Devices Meeting, IEDM Technical Digest, Washington, DC, USA, 10 December 1997; pp. 927–929. [Google Scholar]
- Jin, X.; Fan, X.; Liu, Z.; Kuang, Z.; Cheng, J.; Chen, J.; Liu, Y.; Yang, J. Measurement of high sensitivity and low crosstalk of zero-space microlens for 2.8-µm-pitch active pixel sensor. IEEE Trans. Electron Devices 2010, 57, 415–421. [Google Scholar] [CrossRef]
- Yoon, K.; Kim, C.; Lee, B.; Lee, D. Single-chip CMOS image sensor for mobile applications. IEEE J. Solid State Circuits 2002, 37, 1839–1845. [Google Scholar] [CrossRef]
- Litwiller, D. CCD vs. CMOS: Facts and fiction. Photonics Spectra 2001, 35, 154–158. [Google Scholar]
- Fossum, E. Active pixel sensors: Are CCD’s dinosaurs? Int. Soc. Opt. Eng. 1993, 1900, 2–14. [Google Scholar]
- Jin, X.; Fan, X.; Liu, Z.; Kuang, Z.; Yang, J. Sensitivity and crosstalk study of the zero gap microlens used in 3.2μm active pixel image sensors. Microelectron. Eng. 2010, 87, 631–634. [Google Scholar] [CrossRef]
- Kim, J. Characterization and improvement of random noise in 1/3.2" UXGA CMOS image sensor with 2.8μm pixel using 0.13μm-technology. Solid-State Electron. 2003, 119, 29–32. [Google Scholar]
- Maltoni, D.; Maio, D.; Jain, A.K.; Prabhakar, S. Handbook of Fingerprint Recognition; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Uchida, K. Fingerprint identification. Electron. Comm. Jpn 2005, 2, 19–27. [Google Scholar]
- Rowe, R.; Nixon, K.A. Fingerprint enhancement using a multispectral sensor. In Proceedings of the Biometric Technology for Human Identification II, Orlando, FL, USA, 28 March 2005; Volume 5779. [Google Scholar]
- Sano, E.; Maeda, T.; Matsushita, M.; Shikai, M.; Sasakawa, K.; Ohmi, M.; Haruna, M. Fingerprint sensor based on interior optical characteristics of the finger. Electron. Comm. Jpn. 2008, 91, 48–56. [Google Scholar] [CrossRef]
- Baek, Y. Robust optical fingerprint sensor to moisture fingerprints. In Proceedings of the 2016 International SoC Design Conference (ISOCC), Jeju, Republic of Korea, 23–26 October 2016; pp. 189–190. [Google Scholar]
- Galy, N.; Charlot, B.; Courtois, B. A full fingerprint verification system for a single-line sweep sensor. IEEE Sens. J. 2007, 7, 1054–1065. [Google Scholar] [CrossRef]
- Lee, J.; Min, D.; Kim, J.; Kim, W. A 600-dpi capacitive fingerprint sensor chip and image-synthesis technique. IEEE J. Solid State Circuits 1999, 34, 469–475. [Google Scholar]
- Kim, S.; Kim, T.; Jung, J.; Han, G. A swipe-type fingerprint sensor using fixed-displacement shuttering scheme. IEEE Sens. J. 2020, 20, 14791–14798. [Google Scholar] [CrossRef]
- Weimer, P. The TFT a new thin-film transistor. Proc. IRE 1962, 50, 1462–1469. [Google Scholar] [CrossRef]
- Street, R.; Tsai, C. Fast and slow states at the interface of amorphous silicon and silicon nitride. Appl. Phys. Lett. 1986, 48, 1672–1674. [Google Scholar] [CrossRef]
- Tai, Y.; Tu, C.; Huang, P. Differential signal acquisition using TFT light-sensing pixel array. IEEE Trans. Electron Devices 2021, 68, 3403–3410. [Google Scholar] [CrossRef]
- Chen, C.; Kanicki, J. High field-effect-mobility a-Si:H TFT based on high deposition-rate materials. In Proceedings of the 54th Annual Device Research Conference Digest, Santa Barbara, CA, USA, 26 June 1996; pp. 68–69. [Google Scholar]
- Kuo, Y.; Nominanda, H.; Liu, G. n-channel and p-channel a-Si: H thin-film transistors with copper electrodes. J. Korean Phys. Soc. 2006, 48, S92–S97. [Google Scholar]
- Bae, S.; Ling, Y.; Lin, W.; Zhu, H. 76-2: Invited Paper: Optical Fingerprint Sensor Based on a-Si:H TFT Technology. SID Symp. Dig. Tech. Pap. 2018, 49, 1017–1020. [Google Scholar] [CrossRef]
- Liao, Y.; Chang, C.; Lin, C.; You, J.; Hsieh, H.; Chen, J.; Cho, A.; Liu, Y.; Lai, Y.; Tseng, J.; et al. Flat panel fingerprint optical sensor using TFT technology. In Proceedings of the 2015 IEEE Sensors, Busan, Republic of Korea, 1–4 November 2015. [Google Scholar]
- Cho, A.; Zheng, Z.; Chang, C.; Hsu, W.; Tseng, J.; Chang, J.; Lin, Y.P. 23: Nano-Si optical pixel-sensor array using TFT technology as image-scan/fingerprint panel. SID Symp. Dig. Tech. Pap. 2013, 44, 1066–1069. [Google Scholar] [CrossRef]
- Yoo, C.; Lee, K. A low-ripple poly-Si TFT charge pump for driver-integrated LCD panel. IEEE Trans. Consum. Electron. 2005, 51, 606–610. [Google Scholar]
- Kubota, Y.; Yamane, Y.; Shiota, M.; Ishii, Y.; Tsuchimoto, S.; Funada, F.; Awane, K. Power reduction of driver-integrated p-Si TFT-LCDs with divided shift-registers. Sharp Tech. J. 1997, 67, 45–48. [Google Scholar]
- Meakin, D.; Stoemenos, J.; Migliorato, P.; Economou, N.A. Structural studies of low-twmperature low-pressure chemical deposited polycrystalline Silicon. J. Appl. Phys. 1987, 61, 5031–5037. [Google Scholar] [CrossRef]
- Chao, T.; Lee, C.; Lei, T. Characterization of seminsulating polycrystalline silicon prepared by low-pressure chemical-vapoe-deposition. J. Electrochem. Soc. 1993, 140, 2645–2648. [Google Scholar] [CrossRef]
- Matsumura, H. Formation of silicon-based thin films prepared by catalytic chemical vapor deposition (Cat-CVD) method. Jpn. J. Appl. Phys. Part 1 Regul. Pap. Short Notes Rev. Pap. 1998, 37, 3175–3187. [Google Scholar] [CrossRef]
- Little, T.; Takahara, K.; Koike, H.; Nakazawa, T.; Ichio Yudasaka, I.; Hiroyuki Ohshima, H. Low temperature poly-Si TFTs using solid phase crystallization of very thin films and an electron cyclotron resonance chemical vapor deposition gate insulator. Jpn. J. Appl. Phys. 1991, 30, 3724. [Google Scholar] [CrossRef]
- Efremov, M.; Bolotov, V.; Volodin, V.; Fedina, L.; Lipatnikov, E. Excimer laser and rapid thermal annealing stimulation of solid-phase nucleation and crystallization in amorphous silicon films on glass substrates. J. Phys. Condens. Matter. 1996, 8, 273–286. [Google Scholar] [CrossRef]
- Bhat, G.; Man, W.; Zhonghe, J.; Kwok, H. Analysis and reduction of kink effect in MILC-TFTs. In Proceedings of the 18th International Display Ressearch Conference Asia Display, Seoul, Republic of Korea, 28 September–1 October 1998; pp. 433–436. [Google Scholar]
- Lee, J.; Choi, Y.; Lee, B.; Ahn, B. Microwave-induced low-temperature crystallization of amorphous silicon thin films. J. Appl. Phys. 1997, 82, 2918–2921. [Google Scholar] [CrossRef]
- Chiang, W.; Lin, C.; King, Y.; Cho, A.; Peng, C.; Huang, W. Integrated ambient light sensor with nanocrystalline silicon on a low-temperature polysilicon display panel. IEEE Trans. Electron Devices 2009, 56, 578–586. [Google Scholar] [CrossRef]
- Cho, A.; Tseng, H.; Sun, M.; Chen, S.; Lee, M.; Wu, Y.; Liu, W.; Peng, C.; Kuo, C.; Chen, J.; et al. 22.4: In-Cell multiple ambient light sensor (ALSs) LCD integration using Si-based photonic sensor by a-Si TFT technology. SID Symp. Dig. Tech. Pap. 2010, 41, 319–322. [Google Scholar] [CrossRef]
- Cho, A.; Peng, C.; Chiang, W.; Lin, C.; Chao, C.; Lin, K.; King, Y.; Weng, C.; Gan, F. Integrated ambient light sensor in LTPS LCD panel with silicon nanocrystals photosensor. In Proceedings of the 14th International Display Workshop Kyoto, Sapporo, Japan, 5–7 December 2007; Volume 14, pp. 103–106. [Google Scholar]
- Peng, C.; Chen, M.; Lo, J.; Guo, W.; Tsai, W.; Huang, W.; Wu, Y. 36-2: Invited Paper: LCD with Integrated In-cell Fingerprint Sensor. SID Symp. Dig. Tech. Pap. 2021, 2, 481–484. [Google Scholar] [CrossRef]
- Liu, B.; Shi, X.; Cai, S.; Cai, X.; Lan, X.; Chen, G.; Li, J. 71-2: Novel optical image sensor array using LTPS-TFT backplane technology as fingerprint recognition. SID Symp. Dig. Tech. Pap. 2019, 50, 1004–1006. [Google Scholar] [CrossRef]
- Liu, B.; Chen, B.; Wu, X.; Cai, X.; Shi, X.; Huang, M.; Wu, J.; Wang, H.; Lan, X.; Chen, G.; et al. 42-4: LTPS TFT-LCD with in-cell optical fingerprint scanner. SID Symp. Dig. Tech. Pap. 2020, 51, 615–618. [Google Scholar] [CrossRef]
- Ye, X.; Liu, G.; Zhang, Z.; Zha, G.; Liu, G. P-74: Large-area optical fingerprint-recognition scheme under LCD screen. SID Symp. Dig. Tech. Pap. 2021, 52, 1358–1360. [Google Scholar] [CrossRef]
- Wu, X.; Chen, B.; Li, Z.; Wu, J.; Chen, Y.; Bai, M.; Liu, B.; Chen, G.; Li, J. P-75: Large-area optical fingerprint for OLED based on LTPS technology. SID Symp. Dig. Tech. Pap. 2021, 52, 1361–1363. [Google Scholar] [CrossRef]
- Flamein, F.; Bouthinon, B.; Joimel, J. 6-3: Fingerprint-on-display module based on organic optical sensors for 1-to-4-Finger authentication in next-generation smartphones. SID Symp. Dig. Tech. Pap. 2021, 52, 49–52. [Google Scholar] [CrossRef]
- Akkerman, H.; Peeters, B.; Tordera, D.; van Breemen, A.; Shanmugam, S.; Malinowski, P.; Maas, J.; de Riet, J.; Verbeek, R.; Bel, T.; et al. 71-1: Large-area optical fingerprint sensors for next generation smartphones. SID Symp. Dig. Tech. Pap. 2019, 50, 1000–1003. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, C.; Li, G.; Zhou, L.; Wu, W.; Xu, M.; Wang, L.; Ning, H.; Yao, R.; Peng, J. A low-power high-stability flexible scan driver integrated by IZO TFTs. IEEE Trans. Electron Devices 2016, 63, 1779–1782. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, L.; Zhou, L.; Wu, W.; Yao, R.; Peng, J. A low-power scan driver employing IZO TFTs including an AC-DC type output module. Displays 2015, 38, 93–99. [Google Scholar] [CrossRef]
- Kim, B.; Ryoo, C.I.; Kim, S.J.; Bae, J.U.; Seo, H.S.; Kim, C.D.; Han, M.K. New depletion-mode IGZO TFT shift register. IEEE Electron Device Lett. 2011, 32, 158–160. [Google Scholar] [CrossRef]
- Wu, W.; Song, X.; Zhang, L.; Zhou, L.; Xu, M.; Wang, L.; Peng, J. A highly stable biside gate driver integrated by IZO TFTs. IEEE Trans. Electron Devices 2014, 61, 3335–3338. [Google Scholar] [CrossRef]
- Kamiya, T.; Nomura, K.; Hosono, H. Present status of amorphous In-Ga-Zn-O thin-film transistors. Sci. Technol. Adv. Mater. 2010, 11, 23. [Google Scholar] [CrossRef]
- Gerlach, D.; Wippler, D.; Wilks, R.G.; Wimmer, M.; Lozac’h, M.; Félix, R.; Ueda, S.; Yoshikawa, H.; Lips, K.; Rech, B.; et al. p-Type a-Si:H/ZnO:Al and µc-Si:H/ZnO:Al thin-film solar cell structures—A comparative hard X-ray photoelectron spectroscopy study. In Proceedings of the 2012 IEEE 38th Photovoltaic Specialists Conference (PVSC) PART 2, Austin, TX, USA, 3–8 June 2012; pp. 1–5. [Google Scholar]
- Kim, D.; Kim, Y.; Lee, S.; Kang, M.S.; Kim, D.H.; Lee, H. High resolution a-IGZO TFT pixel circuit for compensating threshold voltage shifts and OLED degradations. IEEE J. Electron Devices Soc. 2017, 5, 372–377. [Google Scholar] [CrossRef]
- Park, M.; Lee, D.; Bae, E.; Kim, D.; Kang, J.; Son, D.; Ryu, S. Fabrication of indium gallium Zinc Oxide (IGZO) TFTs using a solution-based process. Mol. Cryst. Liq. Cryst. 2010, 529, 137–146. [Google Scholar] [CrossRef]
- Suresh, A.; Muth, J.F. Bias stress stability of indium gallium zinc oxide channel based transparent thin film transistors. Appl. Phys. Lett. 2008, 92, 033502. [Google Scholar] [CrossRef] [Green Version]
- Yabuta, H.; Sano, M.; Abe, K.; Aiba, T.; Den, T.; Kumomi, H.; Nomura, K.; Kamiya, T.; Hosono, H. High-mobility thin-film transistor with amorphous InGaZnO4 channel fabricated by room temperature rf-magnetron sputtering. Appl. Phys. Lett. 2006, 89, 112123. [Google Scholar] [CrossRef]
- Shin, W.; Ahn, H.; Na, J.; Hong, S.; Kwon, O.; Lee, J.; Um, J.; Jang, J.; Kim, S.; Lee, J. A driving method of pixel circuit using a-IGZO TFT for suppression of threshold voltage shift in AMLED displays. IEEE Electron Device Lett. 2017, 38, 760–762. [Google Scholar] [CrossRef]
- Zong, Z.; Li, L.; Jang, J.; Li, Z.; Lu, N.; Shang, L.; Ji, Z.; Liu, M. A new surface potential-based compact model for a-IGZO TFTs in RFID applications. In Proceedings of the 2014 IEEE International Electron Devices Meeting, San Francisco, CA, USA, 15–17 December 2014; pp. 35.5.1–35.5.4. [Google Scholar]
- Zou, Y.; Gottardi, M.; Perenzoni, D.; Perenzoni, M.; Stoppa, D. A 1.6 mW 320×240-pixel vision sensor with programmable dynamic background rejection and motion detection. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- Qin, Y.; Wang, H.; Liu, Y. P-215: Organic-inorganic hybrid thin-film photo-detector for fingerprint recognition. SID Symp. Dig. Tech. Pap. 2018, 49, 1604–1606. [Google Scholar] [CrossRef]
- Shukla, D.; Nelson, S.F.; Freeman, D.C.; Rajeswaran, M.; Ahearn, W.G.; Meyer, D.M.; Carey, J.T. Thin-film morphology control in naphthalene-diimide-Based semiconductors: High mobility n-type semiconductor for organic thin-film transistors. Chem. Mater. 2008, 20, 7486–7491. [Google Scholar] [CrossRef]
- Akimichi, H.; Waragai, K.; Hotta, S.; Kano, H.; Sakaki, H. Field-effect transistors using alkyl substituted oligothiophenes. Appl. Phys. Lett. 1991, 58, 1500–1502. [Google Scholar] [CrossRef]
- Tai, Y.; Tu, C.; Yuan, Y.; Chang, Y.; Hsu, M.; Chuang, C. Light-controlled gap-type TFT used for large-area under-screen fingerprint sensor. IEEE J. Electron Devices Soc. 2021, 9, 517–520. [Google Scholar] [CrossRef]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. Energy efficient WiFi-based fingerprinting for indoor positioning with smartphones. In Proceedings of the 2013 IEEE Global Communications Conference, Atlanta, GA, USA, 9–13 December 2013; pp. 4639–4643. [Google Scholar]
- Lee, Y.P.; Ju, Y.-S.; Choi, D.G. Ganglion cell-inner plexiform layer thickness by swept-source optical coherence tomography in healthy Korean children: Normative data and biometric correlations. Sci. Rep. 2018, 8, 10605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, Y.; Larin, K.V. Identification of artificial fingerprints using optical coherence tomography technique. In Optics and Photonics for Counterterrorism and Crime Fighting II; SPIE: Bellingham, WA, USA, 2006; Volume 6402. [Google Scholar]
- Darlow, L.; Webb, L.; Botha, N. Automated spoof-detection for fingerprints using optical coherence tomography. Appl. Opt. 2016, 55, 3387–3396. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Liu, G.; Wang, X. High-accurate and robust fingerprint anti-spoofing system using optical coherence tomography. Expert Syst. Appl. 2019, 130, 31–44. [Google Scholar] [CrossRef]
- Liu, G.; Chen, Z. Capturing the vital vascular fingerprint with optical coherence tomography. Appl. Opt. 2013, 52, 5473–5477. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Buma, T. Biometric mapping of fingertip eccrine glands with optical coherence tomography. IEEE Photonics Technol. Lett. 2010, 22, 1677–1679. [Google Scholar] [CrossRef]
- Meissner, S.; Breithaupt, R.; Koch, E. Defense of fake fingerprint attacks using a swept source laser optical coherence tomography setup. Photonics West Lasers Appl. Sci. Eng. 2013, 8611, 49–52. [Google Scholar]
- Sun, S.; Guo, Z. Sweat glands extraction in optical coherence tomography fingerprints. In Proceedings of the 2017 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Shenzhen, China, 15–17 December 2017; pp. 579–584. [Google Scholar]
- Darlow, L.N.; Connan, J. Efficient internal and surface fingerprint extraction and blending using optical coherence tomography. Appl. Opt. 2015, 54, 9258–9268. [Google Scholar] [CrossRef]
- Darlow, L.N.; Connan, J.; Akhoury, S.S. Internal fingerprint zone detection in optical coherence tomography fingertip scans. J. Electron. Imaging 2015, 24, 14. [Google Scholar] [CrossRef]
- Darlow, L.N.; Connan, J.; Akhoury, S.S. Study on internal to surface fingerprint correlation using optical coherence tomography and internal fingerprint extraction. J. Electron. Imaging 2015, 24, 11. [Google Scholar] [CrossRef]
- Khutlang, R.; Nelwamondo, F.V. Novelty detection-based internal fingerprint segmentation in optical coherence tomography images. In Proceedings of the 2014 Second International Symposium on Computing and Networkingnt, Shizuoka, Japan, 10–12 December 2014; pp. 556–559. [Google Scholar]
- Korohoda, P.; Dabrowski, A.; Pawlowski, P. Optical coherence tomography for fingerprint acquisition from internal layer—A case study. In Proceedings of the 2014 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 22–24 September 2014; pp. 176–180. [Google Scholar]
- Wang, H.; Ma, L.; Chen, P. External and internal fingerprint extraction based on optical coherence tomography. In Proceedings of the International Conference on Optical and Photonic Engineering, Shanghai, China, 24 July 2018; p. 10827. [Google Scholar]
- Bossen, A.; Lehmann, R.; Meier, C. Internal fingerprint identification with optical coherence tomography. IEEE Photonics Technol. Lett. 2010, 22, 507–509. [Google Scholar] [CrossRef]
- da Costa, H.; Silva, L.; Bellon, O.; Bowden, A.; Czovny, R.K. 3D Matching techniques using OCT fingerprint point clouds. In Proceedings of the Imaging, Manipulation, and Analysis of Biomolecules, Cells, and Tissues XV, San Francisco, CA, USA, 16 February 2017; p. 10068. [Google Scholar]
- Moolla, Y.; Singh, A.; Saith, E.; Akhoury, S. Fingerprint matching with optical coherence tomography. Int. Symp. Vis. Comput. 2015, 9475, 237–247. [Google Scholar]
- Raja, K.; Auksorius, E.; Raghavendra, R.; Boccara, A.; Busch, C. Robust verification with subsurface fingerprint recognition using full field optical coherence tomography. In Proceedings of the 30th 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 646–654. [Google Scholar]
- Auksorius, E.; Raja, K.; Topcu, B.; Ramachandra, R.; Busch, C.; Boccara, C.A. Compact and mobile full-field optical coherence tomography sensor for subsurface fingerprint imaging. IEEE Access 2020, 8, 15194–15204. [Google Scholar] [CrossRef]
- Zheng, W.; Lee, D.; Xia, J. Photoacoustic tomography of fingerprint and underlying vasculature for improved biometric identification. Sci. Rep. 2021, 11, 17536. [Google Scholar] [CrossRef]
- Liu, F.; Liu, G.; Zhao, Q.; Shen, L. Robust and high-security fingerprint recognition system using optical coherence tomography. Neurocomputing 2020, 402, 14–28. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, X.; Zhang, X.; Hou, X.; Ma, X.; Tang, S.; Zhang, Y.; Xu, G.; Liu, Q.; Long, S. In-sensor reservoir computing system for latent fingerprint recognition with deep ultraviolet photo-synapses and memristor array. Nat. Commun. 2022, 13, 6590. [Google Scholar] [CrossRef] [PubMed]
- Steiner, T. Semiconductor Nanostructures for Optoelectronic Applications; Emerald Group Publishing Limited: Bingley, UK, 2004; Volume 24, p. 320. [Google Scholar]
- Hashido, R.; Suzuki, A.; Iwata, A.; Okamoto, T.; Satoh, Y.; Inoue, M. A capacitive fingerprint sensor chip using low-temperature poly-Si TFTs on a glass substrate and a novel and unique sensing method. IEEE J. Solid State Circuits 2003, 38, 274–280. [Google Scholar] [CrossRef]
- Liu, J.; Hsiung, Y.; Lu, M. A CMOS micromachined capacitive sensor array for fingerprint detection. IEEE Sens. J. 2012, 12, 1004–1010. [Google Scholar] [CrossRef]
- Olsen, M.; Dusio, M.; Busch, C. Fingerprint skin moisture impact on biometric performance. In Proceedings of the 3rd International Workshop on Biometrics and Forensics (IWBF 2015), Gjovik, Norway, 3–4 March 2015; pp. 1–6. [Google Scholar]
- Shimamura, T.; Morimura, H.; Shimoyama, N.; Sakata, T.; Shigematsu, S.; Machida, K.; Nakanishi, M. Impedance-sensing circuit techniques for integration of a fraud detection function into a capacitive fingerprint sensor. IEEE Sens. J. 2012, 12, 1393–1401. [Google Scholar] [CrossRef]
- Kim, W.; Hong, W.; Kim, T.; Kim, D.; Lee, M. RF sensor-based liveness detection scheme with loop stability compensation circuit for a capacitive fingerprint system. IEEE Access 2019, 7, 152545–152551. [Google Scholar] [CrossRef]
- An, B.W.; Heo, S.; Ji, S.; Bien, F.; Park, J.U. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nature Commun. 2018, 9, 2458. [Google Scholar] [CrossRef] [Green Version]
- Busselaar, E.J. Improved pores detection in fingerprints by applying ring led’s (525 nm). Opt. Appl. 2010, 40, 843–861. [Google Scholar]
- Park, K.; Song, J.; Bien, F. Highly sensitive fingerprint readout IC for glass-covered mutual capacitive fingerprint sensor. In Proceedings of the 2018 23rd Asia and South Pacific Design Automation Conference (ASP-DAC), Jeju, Republic of Korea, 22–25 January 2018; Volume 2, pp. 321–322. [Google Scholar]
- Morimura, H.; Shigematsu, S.; Machida, K. A high-resolution capacitive fingerprint sensing scheme with charge-transfer technique and automatic contrast emphasis. In Proceedings of the 1999 Symposium on VLSI Circuits Digest of Papers (IEEE Cat No99CH36326), Kyoto, Japan, 17–19 June 1999; pp. 157–160. [Google Scholar]
- Inglis, C.; Manchanda, L.; Comizzoll, R.; Dickinson, A.; Martin, E.; Mandis, S.; Silveman, P.; Weber, G.; Ackland, B.; Gorman, L.O. A robust, 1.8 V 250 µW direct-contact 500 dpi fingerprint sensor. In Proceedings of the 1998 IEEE International Solid-State Circuits Conference Digest of Technical Papers, ISSCC First Edition (Cat No98CH36156), San Francisco, CA, USA, 5–7 February 1998; pp. 284–285. [Google Scholar]
- Seung-Min, J.; Jin-Moon, N.; Dong-Hoon, Y.; Moon-Key, L. A CMOS integrated capacitive fingerprint sensor with 32-bit RISC microcontroller. IEEE J. Solid-State Circuits 2005, 40, 1745–1750. [Google Scholar] [CrossRef]
- Meng, X.; Zhang, Z.; Lin, D.; Liu, W.; Zhou, S.; Ge, S.; Su, Y.; Peng, C.; Zhang, L. Effects of particle size of dielectric fillers on the output performance of piezoelectric and triboelectric nanogenerators. J. Adv. Ceram. 2021, 10, 991–1000. [Google Scholar] [CrossRef]
- Fortunato, E.; Barquinha, P.; Martins, R. Oxide semiconductor thin-film transistors: A review of recent advances. Adv. Mater. 2012, 24, 2945–2986. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, E.; Um, J.G.; Mativenga, M.; Jang, J. Highly robust neutral plane oxide TFTs withstanding 0.25 mm bending radius for stretchable electronics. Sci. Rep. 2016, 6, 25734. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.; Kim, S.; Ko, J.; Yeom, H.; Byun, C.; Lee, S.H.; Joe, D.J.; Im, T.; Park, S.; Lee, K. Skin-like oxide thin-film transistors for transparent displays. Adv. Funct. Mater. 2016, 26, 6170–6178. [Google Scholar] [CrossRef]
- Lee, S.; Jeong, D.; Mativenga, M.; Jang, J. Highly robust bendable oxide thin-film transistors on polyimide substrates via mesh and strip patterning of device layers. Adv. Funct. Mater. 2017, 27, 1700437. [Google Scholar] [CrossRef]
- Yeon Kwon, J.; Kyeong Jeong, J. Recent progress in high performance and reliable n-type transition metal oxide-based thin film transistors. Semicond. Sci. Technol. 2015, 30, 024002. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Wong, M.; Ng, M.T.; Chui, K.; Kong, C.; Lu, L.; Liu, T.; Luo, J. High precision active-matrix self-capacitive touch panel based on fluorinated ZnO thin-film transistor. J. Disp. Technol. 2015, 11, 22–29. [Google Scholar] [CrossRef]
- Kang, I.; Hong, M.; Bae, B. Capacitive sensor pixel circuit with single transistor for touch-fingerprint recognition sensor. Electron. Lett. 2018, 54, 1212–1214. [Google Scholar] [CrossRef]
- An, J.; Han, S.; Ye, J. A Sensing mode reconfigurable analog front-end IC for capacitive touch and a-IGZO TFT-based active-matrix capacitive fingerprint sensors. IEEE Sens. J. 2019, 19, 11544–11552. [Google Scholar] [CrossRef]
- An, J.; Han, S.; Kim, J.; Yoon, D.; Kim, Y.; Hong, H.; Ye, J.; Jung, S.; Lee, S.; Jeong, J.; et al. A 3.9-kHz frame rate and 61.0-dB SNR analog front-end IC with 6-bit pressure and tilt angle expressions of active stylus using multiple-frequency driving method for capacitive touch screen panels. IEEE J. Solid State Circuits 2018, 53, 187–203. [Google Scholar] [CrossRef]
- An, J.; Han, S.; Kim, J.; Yoon, D.; Kim, Y.; Hong, H.; Ye, J.; Jung, S.; Lee, S.; Jeong, J.; et al. 9.6 A 3.9 kHz-frame-rate capacitive touch system with pressure/tilt angle expressions of active stylus using multiple-frequency driving method for 65″ 104×64 touch screen panel. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 168–169. [Google Scholar]
- An, J.; Hong, S.; Kwon, O. A highly linear and accurate touch data extraction algorithm based on polar coordinates for large-sized capacitive touch screen panels. IEEE Trans. Consum. Electron. 2016, 62, 341–348. [Google Scholar] [CrossRef]
- An, J.; Jung, S.; Hong, S.; Kwon, O. A highly noise-immune capacitive touch sensing system using an adaptive chopper stabilization method. IEEE Sens. J. 2017, 17, 803–811. [Google Scholar] [CrossRef]
- Kwon, O.; An, J.; Hong, S. Capacitive touch systems with styli for touch sensors: A review. IEEE Sens. J. 2018, 18, 4832–4846. [Google Scholar] [CrossRef]
- Lee, S.; An, J.; Hong, S.; Kwon, O. In-cell capacitive touch panel structures and their readout circuits. In Proceedings of the 2016 23rd International Workshop on Active-Matrix Flatpanel Displays and Devices (AM-FPD), Kyoto, Japan, 6–8 July 2016; pp. 258–261. [Google Scholar]
- Seo, W.; Pi, J.; Cho, S.; Kang, S.; Ahn, S.; Hwang, C.; Jeon, H.; Kim, J.; Lee, M. Transparent fingerprint sensor system for large flat panel display. Sensors 2018, 18, 293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barrett, G.; Omote, R. Projected-capacitive touch technology. Inf. Disp. 2010, 26, 16–21. [Google Scholar] [CrossRef]
- Blush, J.; Chase, W.; den Boer, W.; Bulea, M.; Day, S.; Hovden, B.; Hsu, A. 70-4L: Late-news paper: Large-area single-layer capacitive touch panel. SID Symp. Dig. Tech. Pap. 2017, 48, 1031–1033. [Google Scholar] [CrossRef]
- Kim, S.; Choi, W.; Rim, W.; Chun, Y.; Shim, H.; Kwon, H.; Kim, J.; Kee, I.; Kim, S.; Lee, S.; et al. A highly sensitive capacitive touch sensor integrated on a thin-film-encapsulated active-matrix OLED for ultrathin displays. IEEE Trans. Electron Devices 2011, 58, 3609–3615. [Google Scholar] [CrossRef]
- Song, K.; Choi, J.; Chun, J. A method for enhancing the sensing distance of a fingerprint sensor. Sensors 2017, 17, 2280. [Google Scholar] [CrossRef] [Green Version]
- Tang, K.; Liu, A.; Wang, W.; Li, P.; Chen, X. A novel fingerprint sensing technology based on electrostatic imaging. Sensors 2018, 18, 3050. [Google Scholar] [CrossRef] [Green Version]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240Hz frame scan rate mutual capacitor 30×24 touch-screen panel read-out IC using code-division multiple sensing technique. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 17–21 February 2013; Volume 56, pp. 388–389. [Google Scholar]
- Ji, S.; Hyun, B.G.; Kim, K.; Lee, S.Y.; Kim, S.-H.; Kim, J.-Y.; Song, M.H.; Park, J.-U. Photo-patternable and transparent films using cellulose nanofibers for stretchable origami electronics. NPG Asia Mater. 2016, 8, e299. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Jang, J.; Cho, E.; Kim, S.-H.; Kang, E.-S.; Kim, J.; Kim, H.-K.; Kong, H.; Kim, S.-K.; Kim, J.-Y.; et al. High dielectric performances of flexible and transparent cellulose hybrid films controlled by multidimensional metal nanostructures. Adv. Mater. 2017, 29, 1700538. [Google Scholar] [CrossRef]
- Li, S.; Chen, X.; Li, X.; Tian, H.; Wang, C.; Nie, B.; He, J.; Shao, J. Bioinspired robot skin with mechanically gated electron channels for sliding tactile perception. Sci. Adv. 2022, 8, eade0720. [Google Scholar] [CrossRef]
- Fang, Z.; Zhu, H.; Preston, C.; Han, X.; Li, Y.; Lee, S.; Chai, X.; Chen, G.; Hu, L. Highly transparent and writable wood all-cellulose hybrid nanostructured paper. J. Mater. Chem. C 2013, 1, 6191–6197. [Google Scholar] [CrossRef]
- Jung, Y.; Chang, T.; Zhang, H.; Yao, C.; Zheng, Q.; Yang, V.; Mi, H.; Kim, M.; Cho, S.; Park, D.; et al. High-performance green flexible electronics based on biodegradable cellulose nanofibril paper. Nat. Commun. 2015, 6, 7170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, W.; Yan, C.; Foo, C.; Lee, P. Foldable electrochromics enabled by nanopaper transfer method. Adv. Funct. Mater. 2015, 25, 4203–4210. [Google Scholar] [CrossRef]
- Okahisa, Y.; Yoshida, A.; Miyaguchi, S.; Yano, H. Optically transparent wood–cellulose nanocomposite as a base substrate for flexible organic light-emitting diode displays. Compos. Sci. Technol. 2009, 69, 1958–1961. [Google Scholar] [CrossRef]
- Hwang, H.; Lee, H.; Jang, B.; Kim, H.; Lee, T.; Chae, Y. 56-3: A 500-dpi transparent on-glass capacitive fingerprint sensor. SID Symp. Dig. Tech. Pap. 2017, 48, 838–841. [Google Scholar] [CrossRef]
- Kim-Lee, H.; Hong, S.; Kim, D.; Kim, J.; Kim, H.; Chung, S.; Cho, E.; Kim, H.; Lee, B. On-screen fingerprint sensor with optically and electrically tailored transparent electrode patterns for use on high-resolution mobile displays. Microsyst. Nanoeng. 2020, 6, 98. [Google Scholar] [CrossRef]
- Ma, H.; Liu, Z.; Heo, S.; Lee, J.; Na, K.; Jin, H.B.; Jung, S.; Park, K.; Kim, J.J.; Bien, F. On-display transparent half-diamond pattern capacitive fingerprint sensor compatible with AMOLED display. IEEE Sens. J. 2016, 16, 8124–8131. [Google Scholar] [CrossRef]
- Wang, L.; Xi, K.; Qin, F.; Lin, B.; Su, P.; Gong, S.; Peng, X. 22.3: Multi-fingerprint capacitive sensor with transparent, low-cost solution. SID Symp. Dig. Tech. Pap. 2021, 52, 298–300. [Google Scholar] [CrossRef]
- Kim, D.; Yun, D. A study on the effect of fingerprints in a wet system. Sci. Rep. 2019, 9, 16554. [Google Scholar] [CrossRef] [Green Version]
- Decker, C. The use of UV irradiation in polymerization. Polym. Int. 1998, 45, 133–141. [Google Scholar] [CrossRef]
- Bouvet-Marchand, A.; Loubat, M.; Graillot, A.; Volk, J.; Dauksevicius, R.; Saoutieff, E.; Viana, A.; Christian, B.; Lebedev, V.; Sturm, C. UV-crosslinked polymeric materials for encapsulation of ZnO nanowires in piezoelectric fingerprint sensors. Procedia Eng. 2016, 168, 1135–1139. [Google Scholar] [CrossRef]
- Hsiung, Y.; Lu, M. A CMOS capacitive pressure sensor chip for fingerprint detection. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011; pp. 24–27. [Google Scholar]
- Sugiyama, S.; Kawahata, K.; Yoneda, M.; Igarashi, I. Tactile image detection using a 1k-element silicon pressure sensor array. Sens. Actuators A Phys. 1990, 22, 397–400. [Google Scholar] [CrossRef]
- Heule, M.; Gauckler, L.J. Miniaturised arrays of tin oxide gas sensors on single microhotplate substrates fabricated by micromolding in capillaries. Sens. Actuators B Chem. 2003, 93, 100–106. [Google Scholar] [CrossRef]
- Iula, A. Ultrasound systems for biometric recognition. Sensors 2019, 19, 2317. [Google Scholar] [CrossRef] [Green Version]
- Siddiqi, M.; Beurskens, R.; Kruizinga, P.; Zeeuw, C.; Strydis, C. Securing implantable medical devices using ultrasound waves. IEEE Access 2021, 9, 80170–80182. [Google Scholar] [CrossRef]
- Ren, D.; Sun, Y.; Shi, J.; Chen, R. A review of transparent sensors for photoacoustic imaging applications. Photonics 2021, 8, 324. [Google Scholar] [CrossRef]
- Schmitt, R.; Owen, J. Acoustic impediography: Imaging surface acoustic impedance using 1–3 piezo-composite for integrated fingerprinting. In Proceedings of the 2011 IEEE 61st Electronic Components and Technology Conference (ECTC), Lake Buena Vista, FL, USA, 31 May–3 June 2011; pp. 1296–1299. [Google Scholar]
- Schneider, J. Surface Feature Mapping Using High-Resolution C-Scan Ultrasonography. Ph.D. Thesis, State University of New York at Buffalo, Buffalo, NY, USA, 1990. [Google Scholar]
- Witvrouw, A. CMOS–MEMS integration today and tomorrow. Scr. Mater. 2008, 59, 945–949. [Google Scholar] [CrossRef]
- Apte, N.; Park, K.; Nikoozadeh, A.; Khuri-Yakub, B.T. Bandwidth and sensitivity optimization in CMUTs for airborne applications. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 166–169. [Google Scholar]
- Oralkan, O.; Ergun, A.; Johnson, J.; Karaman, M.; Demirci, U.; Kaviani, K.; Lee, T.; Khuri-Yakub, B.T. Capacitive micromachined ultrasonic transducers: Next-generation arrays for acoustic imaging? IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 1596–1610. [Google Scholar] [CrossRef]
- You, W.; Cretu, E.; Rohling, R. Analytical modeling of CMUTs in coupled electro-mechano-acoustic domains using plate vibration theory. IEEE Sens. J. 2011, 11, 2159–2168. [Google Scholar] [CrossRef]
- Salim, M.; Abd Malek, M.; Heng, R.B.; Juni, K.M.; Sabri, N. Capacitive micromachined ultrasonic transducers: Technology and application. J. Med. Ultrasound 2012, 20, 8–31. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Tang, H.; Fung, S.; Wang, Q.; Tsai, J.M.; Daneman, M.; Boser, B.E.; Horsley, D.A. Ultrasonic fingerprint sensor using a piezoelectric micromachined ultrasonic transducer array integrated with complementary metal oxide semiconductor electronics. Appl. Phys. Lett. 2015, 106, 263503. [Google Scholar] [CrossRef] [Green Version]
- Savoia, A.; Caliano, G.; Iula, A.; Longo, C.; Caronti, A.; Carotenuto, R.; Pappalardo, M. Design and fabrication of a cMUT probe for ultrasound imaging of fingerprints. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 1877–1880. [Google Scholar]
- Kwak, Y.S.; Choi, W.Y.; Park, K.K. Fingerprint imaging using CMUT impediography with glass waveguide. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, Washington, DC, USA, 6–9 September 2017; pp. 1–4. [Google Scholar]
- Akasheh, F.; Myers, T.; Fraser, J.D.; Bose, S.; Bandyopadhyay, A. Development of piezoelectric micromachined ultrasonic transducers. Sens. Actuators A Phys. 2004, 111, 275–287. [Google Scholar] [CrossRef]
- Yan, Y.; Geng, L.; Zhu, L.; Leng, H.; Li, X.; Liu, H.; Lin, D.; Wang, K.; Wang, Y.; Priya, S. Ultrahigh piezoelectric performance through synergistic compositional and microstructural engineering. Adv. Sci. 2022, 9, 2105715. [Google Scholar] [CrossRef]
- Hajati, A.; Latev, D.; Gardner, D. 3D MEMS piezoelectric ultrasound transducer technology. In Proceedings of the 2013 Joint IEEE International Symposium on Applications of Ferroelectric and Workshop on Piezoresponse Force Microscopy (ISAF/PFM), Prague, Czech Republic, 21–25 July 2013; pp. 231–235. [Google Scholar]
- Tang, H.; Lu, Y.; Fung, S.; Tsai, J.M.; Daneman, M.; Horsley, D.A.; Boser, B.E. Pulse-echo ultrasonic fingerprint sensor on a chip. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems, Anchorage, AK, USA, 21–25 June 2015; pp. 674–677. [Google Scholar]
- Fung, S.; Lu, Y.; Tang, H.; Tsai, J.M.; Daneman, M.; Boser, B.E.; Horsley, D.A. Theory and experimental analysis of scratch resistant coating for ultrasonic fingerprint sensors. In Proceedings of the 2015 IEEE International Ultrasonics Symposium, Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Helsch, G.; Frischat, G. Sol-Gel Technologies for Glass Producers and Users; Springer: Boston, MA, USA, 2004; pp. 217–221. [Google Scholar]
- Horsley, D.A.; Lu, Y.; Tang, H.; Jiang, X.; Boser, B.E.; Tsai, J.M.; Ng, E.J.; Daneman, M.J.I. Ultrasonic fingerprint sensor based on a PMUT array bonded to CMOS circuitry. In Proceedings of the 2016 IEEE International Ultrasonics Symposium, Tours, France, 18–21 September 2016; pp. 1–4. [Google Scholar]
- Jiang, X.; Lu, Y.; Tang, H.; Tsai, J.; Ng, E.; Daneman, M.; Boser, B.; Horsley, D. Monolithic ultrasound fingerprint sensor. Microsyst. Nanoeng. 2017, 3, 17059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, H.; Lu, Y.; Jiang, X.; Ng, E.J.; Tsai, J.; Horsley, D.; Boser, B. 3-D ultrasonic fingerprint sensor-on-a-chip. IEEE J. Solid-State Circuits 2016, 51, 2522–2533. [Google Scholar] [CrossRef]
- Jiang, X.; Tang, H.; Lu, Y.; Ng, E.; Tsai, J.; Boser, B.; Horsley, D. Ultrasonic fingerprint sensor with transmit beamforming based on a PMUT array bonded to CMOS circuitry. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1401–1408. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Li, Y.; Chen, Y.; Ju, Z.; Tao, L.; Pang, Y.; Yang, Y.; Ren, T. Large-scale and high-density pMUT array based on isolated Sol-Gel PZT membranes for fingerprint imaging. J. Electrochem. Soc. 2017, 164, B377–B381. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.; Chen, M.; Jiang, X. Under-display ultrasonic fingerprint recognition with finger vessel imaging. IEEE Sens. J. 2021, 21, 7412–7419. [Google Scholar] [CrossRef]
- Peng, C.; Chen, M.; Wang, H.; Shen, J.; Jiang, X. Broadband piezoelectric transducers for under-display ultrasonic fingerprint sensing applications. IEEE Trans. Ind. Electron. 2021, 68, 4426–4434. [Google Scholar] [CrossRef]
- Peng, C.; Chen, M.; Wang, H.; Shen, J.; Jiang, X. P(VDF-TrFE) thin-film-based transducer for under-display ultrasonic fingerprint sensing applications. IEEE Sens. J. 2020, 20, 11221–11228. [Google Scholar] [CrossRef]
- Schmitt, R.; Scott, W.; Irving, R.; Arnold, J.; Bardons, C.; Halpert, D.; Parker, L. Ultrasonic imaging of fingerprints using acoustical impediography. In Proceedings of the IEEE Ultrasonics Symposium, Washington, DC, USA, 6–9 September 2004; pp. 680–688. [Google Scholar]
- Strohmann, J.L.; Xu, C.; Lu, Y.; Panchawagh, H. Ultrasonic biometric authentication system with contact gesture sensing. In Proceedings of the 2020 IEEE International Ultrasonics Symposium, Las Vegas, NV, USA, 7–11 September 2020; pp. 1–3. [Google Scholar]
- Xu, C.; Lu, Y.; Strohmann, J.L.; Panchawagh, H. Large area multi-functional ultrasound sensor: Fingerprint, touch pressure, passive Stylus. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020; pp. 1–3. [Google Scholar]
- Park, J.; Kim, M.; Lee, Y.; Lee, H.S.; Ko, H. Fingertip skin–inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, e1500661. [Google Scholar] [CrossRef] [Green Version]
- Bernstein, J.; Finberg, S.; Houston, K.; Niles, L.; Chen, H.; Cross, L.; Li, K.; Udayakumar, K. Micromachined high frequency ferroelectric sonar transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 960–969. [Google Scholar] [CrossRef]
- Suo, Z.; Hao, Z.; Qiao, D. The designing and manufacturing of 1MHz piezoelectric micro-machined ultrasonic transducer. In Proceedings of the 2012 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Shanghai, China, 23–25 November 2012; pp. 5–8. [Google Scholar]
- Yaacob, M.I.H.; Arshad, M.R.; Manaf, A.A. Theoretical characterization of square piezoelectric micro ultrasonic transducer for underwater applications. In Proceedings of the 7th International Symposium on Mechatronics and its Applications, Sharjah, United Arab Emirates, 20–22 April 2010; pp. 1–5. [Google Scholar]
- Przybyla, R.J.; Shelton, S.E.; Guedes, A.; Izyumin, I.I.; Kline, M.H.; Horsley, D.A.; Boser, B.E. In-air rangefinding with an AlN piezoelectric micromachined ultrasound transducer. IEEE Sens. J. 2011, 11, 2690–2697. [Google Scholar] [CrossRef]
- Li, F.; Zhang, S.; Xu, Z.; Lin, D.; Gao, J.; Li, Z.; Wang, L. An efficient way to enhance output strain for shear mode Pb(In1/2Nb1/2)O3-Pb(Mg1/3Nb2/3)O3-PbTiO3 crystals: Applying uniaxial stress perpendicular to polar direction. Appl. Phys. Lett. 2012, 100, 192901. [Google Scholar] [CrossRef] [Green Version]
- Cai, C.; Zhang, D.; Liu, W.; Wang, J.; Zhou, S.; Su, Y.; Sun, X.; Lin, D. Synthesis, giant dielectric, and pyroelectric response of (001)-oriented Pr3+ doped Pb(Mg1/3Nb2/3)O3-PbTiO3 ferroelectric nano-films grown on Si substrates. Materials 2018, 11, 2392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Lin, D.; Zhang, S.; Shrout, T.R.; Li, F. Revisiting the structural stability and electromechanical properties in lead zinc niobate-lead titanate-barium titanate (PZN-PT-BT) ternary system. J. Eur. Ceram. Soc. 2020, 40, 1236–1242. [Google Scholar] [CrossRef]
- Zhang, S.; Li, F.; Lee, H.J.; Lin, D.; Shrout, T.R.; Luo, J.; Meyer, R.J. Evaluation of PMN-PT based crystals for various applications. In Proceedings of the 2011 International Symposium on Applications of Ferroelectrics and 2011 International Symposium on Piezoresponse Force Microscopy and Nanoscale Phenomena in Polar Materials, Vancouver, BC, Canada, 24–27 July 2011; pp. 1–4. [Google Scholar]
- Liu, Y.; Liu, W.; Lin, D.; Niu, X.; Zhou, S.; Zhang, J.; Ge, S.; Zhu, Y.; Meng, X.; Chen, Z. Fabrication and optical properties of transparent P(VDF-TrFE) ultrathin films. Nanomaterials 2022, 12, 588. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Zhu, W.; Miao, J.; Zhu, H.; Chao, C.; Tan, O.K. Micromachined thick film piezoelectric ultrasonic transducer array. Sens. Actuators A Phys. 2006, 130–131, 485–490. [Google Scholar] [CrossRef]
- Wang, Z.; Zhu, W.; Miao, J.; Zhu, H.; Chao, C.; Zhao, C.; Tan, O.K. Fabrication and characterization of piezoelectric micromachined ultrasonic transducers with thick composite PZT films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 2289–2297. [Google Scholar] [CrossRef]
- Rong, Z.; Zhang, M.; Ning, Y.; Pang, W. An ultrasound-induced wireless power supply based on AlN piezoelectric micromachined ultrasonic transducers. Sci. Rep. 2022, 12, 16174. [Google Scholar] [CrossRef]
- Zheng, Q.; Wang, H.; Yang, H.; Jiang, H.; Chen, Z.; Lu, Y.; Feng, P.X.L.; Xie, H. Thin ceramic PZT dual- and multi-frequency pMUT arrays for photoacoustic imaging. Microsyst. Nanoeng. 2022, 8, 122. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.; Du, W.; Lin, D.; Ai, M.; Li, S.; Zhang, L. Recent progress on hydrogel-based piezoelectric devices for biomedical applications. Micromachines 2023, 14, 167. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparative Aspects | Method | Market | Speed/ Person | False Rejection Rate/% | Advantage | Disadvantage | |
|---|---|---|---|---|---|---|---|
 | Iris | optical | about 7% | 1–25 s | About 10 | Not easy to age and wear | Difficult collection |
 | Facial | optical | about 18% | ≤5 s | <0.2 | Non-contact | Affected by the light, posture, and facial expression |
 | Finger vein | optical, capacitive, ultrasonic | about 3% | 1–10 s | 5 | A wide range of identification | Large-size |
 | Voice | magnetoelectric, capacitive. | about 5% | 1–3 s | About 10 | Non-contact | Affected by the volume, speed, and sound quality of the sound |
 | Fingerprint | optical, capacitive, ultrasonic | about 58% | ≤1 s | About 5 | Small equipment | Marks on the screen |
| Semiconductor Materials | Process Temperature/°C | Migration Rate/cm2∙V−1∙s−1 | Number of Lithography | Capacity |
|---|---|---|---|---|
| Amorphous Silicon | <350 | 0.1–1 | 4–6 | high |
| Poly silicon | <700 | 10–400 | 5–11 | low |
| Organics | <150 | <2 | - | low |
| Amorphous Oxide | <350 | 1–100 | 4–7 | high |
| Sensor Type | TOT | HOT | HUD |
|---|---|---|---|
| Light source | 460 nm LED | Wavelength invisible LED | OLED |
| Light source position | Back of the TFT sensor | Under the TFT glass substrate | - |
| Sensing area | FAP10(0.5″ × 0.65″)~FAP60(3.2″ × 3.0″) | 10 mm × 14 mm | 12 mm × 20 mm 12 mm × 40 mm 40 mm × 51 mm |
| Bonding method | Optical adhesives | Optically Clear Resin (OCR) Optically Clear Adhesive (OCA) | - |
| Fiber optic board | √ | - | - |
| Collimator | - | - | √ |
| Sensor Top | Fiber optical plate | A glass plate | OLED |
| Area/mm2 | 10 × 10 | 10 × 10 | 6 × 6 | - | 6.4 × 6.4 |
| Channel | 200 × 200 | 64 × 128 | 72 × 72 | 192 × 256 | 80 × 80 |
| Light Transmittance (%) | 94 | 94 | - | 79.90 | 89.05 |
| Electrode Material | Indium tin oxide | Indium tin oxide | Metal Mesh | Indium tin oxide | Hybrid nanostructures |
| Electrode Shape | Diamond | Diamond | Half Diamond | - | - |
| Capacitance/Voltage Difference | 50 fF (Ridge and Valley) | 210 fF (Contact and non-contact) | - | 4.2 ± 0.07 fF (Ridge and Valley) | - |
| Resolution | 500 DPI | 300–363 DPI | 322 DPI | - | 318 CPI |
| Characteristics | - | 0.3–1 mm Cover glass | - | Acquisition of dual fingerprints | Pressure and temperature sensors |
| Ref. | [202] | [203] | [204] | [205] | [167] |
| Arrays | 24 × 8 | 110 × 56 | 65 × 42 | 50 × 50 |
| Top Electrode | 200 nm Mo | Al | 24 µm Al | 200 nmPt |
| Piezoelectric Layer | 800 nm AlN | 1 µm AlN | 1 µm AlN | 1 µm PZT |
| Bottom Electrode | 200 nm Al | Mo | Mo | 200 nm Pt |
| Elastic Layer | 6 µm Si | 2 µm Si | 1.7 µm Si | 10 µm Si |
| Substrate | SiO2 | SOI | SiO2 | 600 nm Al |
| Protective Coating | Al2O3 | PDMS | PDMS | - |
| Filling Factor | 17% | 51.70% | - | - |
| Pixel | - | 591 × 438 DPI | 376 × 318 DPI | - |
| Readout Time (Individual\Array) | -/24 µs | 24 µs/2.64 ms | 24 µs/1.56 ms | - |
| Imaging Area | 2.3 × 0.7 mm2 | 4.6 × 3.2 mm2 | 4.6 × 3.2 mm2 | - |
| Resonance Frequency | 22 MHz | 14 MHZ | 20 MHz | 25.02 MHz |
| Array Spacing | 100 µm | 43 × 58 µm | 100 µm | 50 × 100 µm |
| Pulse Excitation | 28 V | 24 V | 24 V | - |
| Number of Cycles | 2 | 3 | - | - |
| Active Layer | PZT-5H | PZT-5 | PVDF-TrFE | 1–3 Piezoelectric Ceramics | 110 × 56PMUT |
|---|---|---|---|---|---|
| Resolution/DPI | 500 | 500 × 500 | 500 × 500 | 500 | 591 × 438 |
| Imaging range | Fingerprints and finger vessels | Fingerprints | Fingerprints | Fingerprints | Fingerprints |
| Bandwidth/% | 73.40 | 72.40 | 52.88 | 125 | 37 |
| Loop sensitivity/dB | −52.84 | −52.69 | −60 | −52.79 | −78.06 |
| Sensor aperture size | 500 × 500 µm2 | 1 × 1 mm2 | 5 × 5 mm2 | - | - |
| Center Frequency/MHz | 21.2 | 20.7 | 39.85 | 16.1 | 14 |
| Conversion Sensitivity/kPa·V−1 | 25.6 | 25.8 | - | 25.7 | - |
| Reception sensitivity/µmV(kPa)−1 | 89.1 | 89.9 | - | 89.2 | - |
| Impedance | 106 | 98.8 | - | 105 | 99.8 |
| Ref. | [236] | [237] | [238] | [239] | [222] |
| Material Properties | AlN | ZnO | PZT | PVDF |
|---|---|---|---|---|
| Electromechanical coupling coefficient/K2 | 3.1–8 | 1.5–1.7 | 2–3.5 | 10–14 |
| Dielectric constant | 8.5–10 | 9.2 | 80–400 | 9–13 |
| Density/g·cm−3 | 3.3 | 5.61 | 7.8 | 1.17–1.79 |
| Modulus of elasticity | 300–350 | 110–140 | 61 | 840 |
| Hardness/GPa | 15 | 4–5 | 7–18 | - |
| Coefficient of thermal expansion/ × 10−6 k | 5.2 | 4 | 1.75 | - |
| Piezoelectric constants/pC·N−1 | 4.5–6.4 | 12 | 38–289 | 18.32 |
| Method | Core Technology | DPI | Cost | Default | Application |
|---|---|---|---|---|---|
| optical | Total reflection | low | low | Affected by the ambient light and the finger surface debris | roll machine, phone |
| capacitive | Intensive capacitance arrays | >500 | low | Affected by the human body’s charge | phone |
| temperature | Micro heating element | 300–500 | middle | The temperature difference feature is weakened after multiple contacts | Carlock electronic key |
| ultrasonic | Ultrasonic imaging technique | >500 | high | Prolonged exposure is harmful to the human body | phone |
| radio frequency | Radiofrequency imaging technology | high | high | Low recognition of some finger modes | True Print scanner |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Niu, Q.; Li, X.; Xue, J.; Liu, W.; Lin, D. A Review of Fingerprint Sensors: Mechanism, Characteristics, and Applications. Micromachines 2023, 14, 1253. https://doi.org/10.3390/mi14061253
Yu Y, Niu Q, Li X, Xue J, Liu W, Lin D. A Review of Fingerprint Sensors: Mechanism, Characteristics, and Applications. Micromachines. 2023; 14(6):1253. https://doi.org/10.3390/mi14061253
Chicago/Turabian StyleYu, Yirong, Qiming Niu, Xuyang Li, Jianshe Xue, Weiguo Liu, and Dabin Lin. 2023. "A Review of Fingerprint Sensors: Mechanism, Characteristics, and Applications" Micromachines 14, no. 6: 1253. https://doi.org/10.3390/mi14061253