
A New Dual-Mass MEMS Gyroscope Fault Diagnosis Platform

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
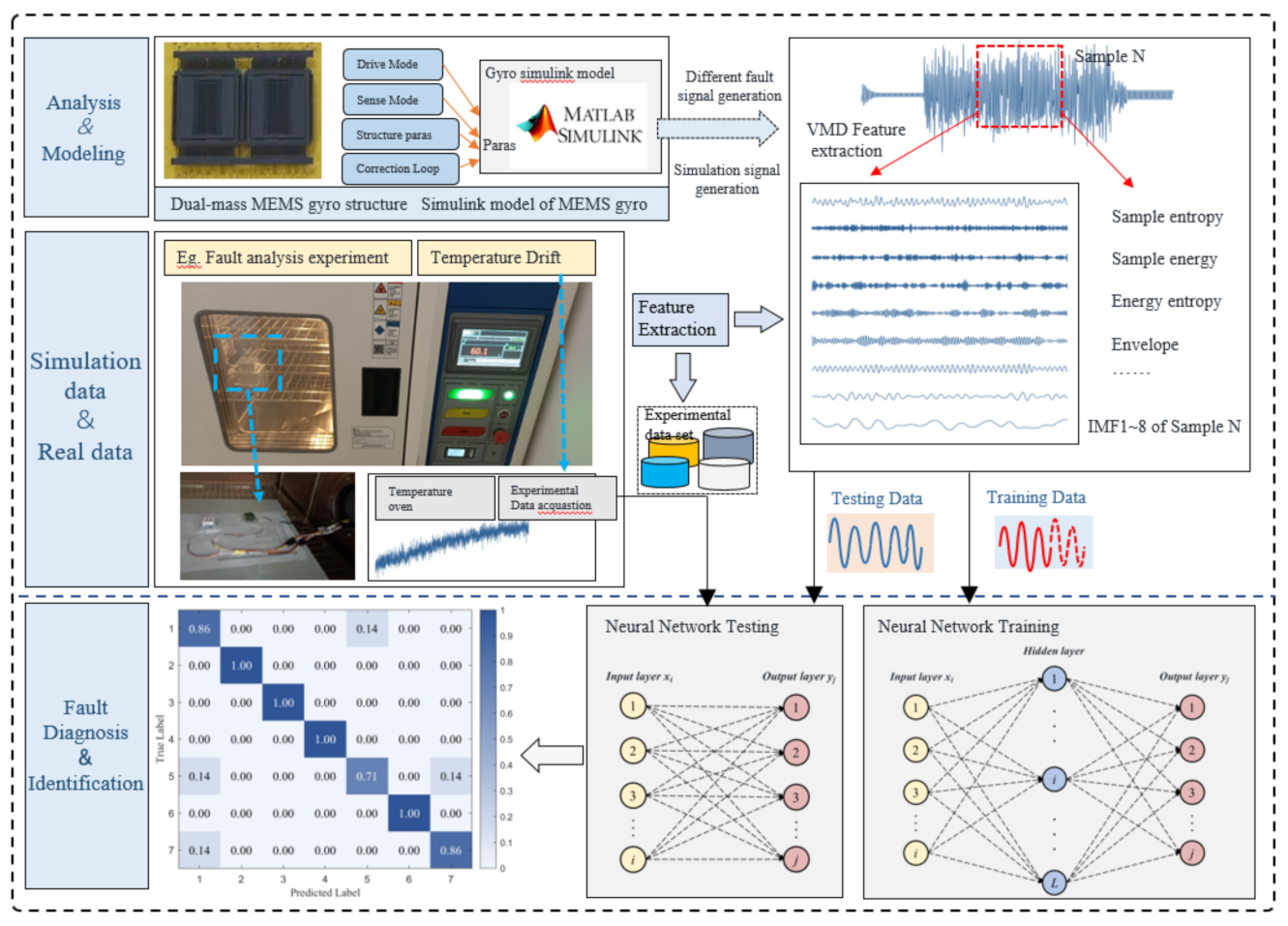
- The platform is a complete self-feedback system, integrating a dualmass MEMS gyroscope Simulink structure model and measurement and control system, gyroscope fault signal simulation model, data feature extraction and identification classification algorithm, and real data feedback verification.
- (2)
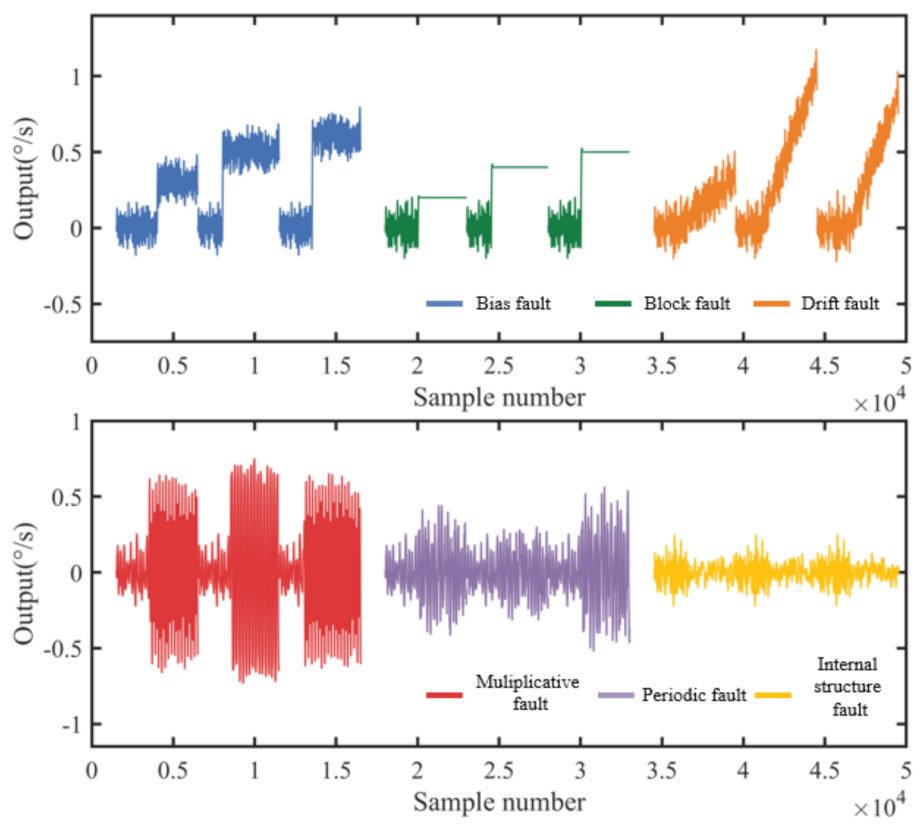
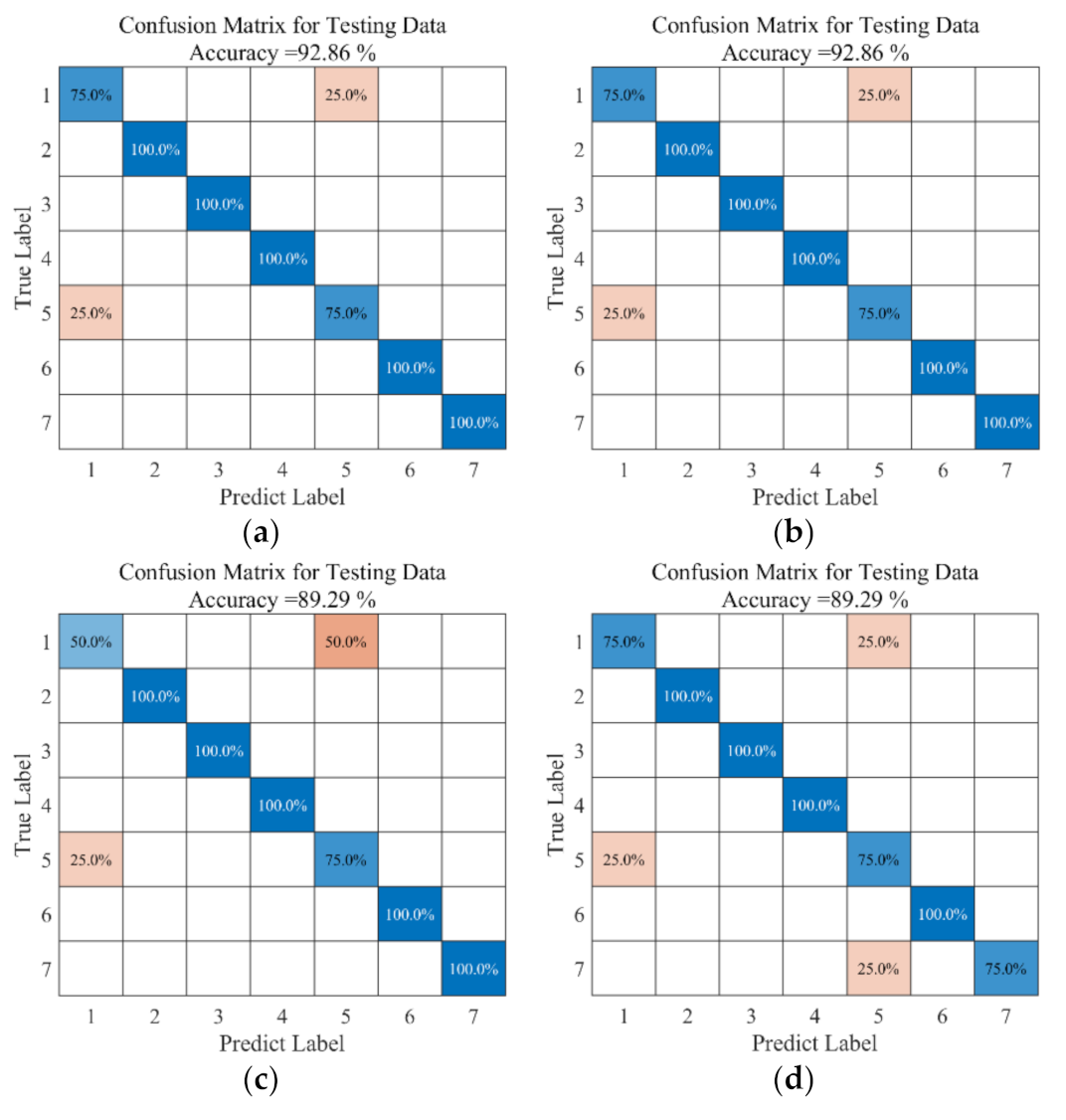
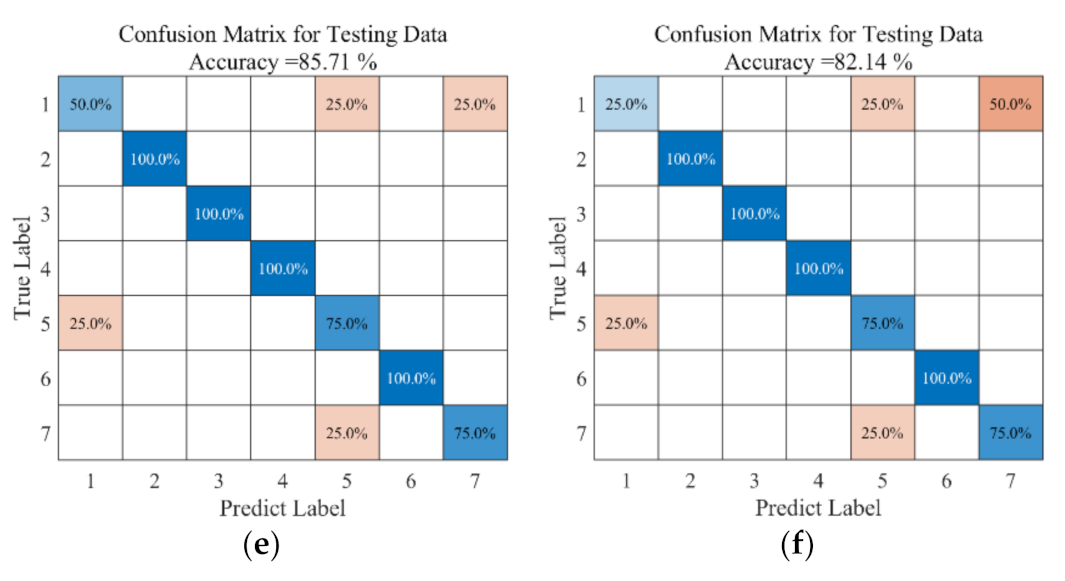
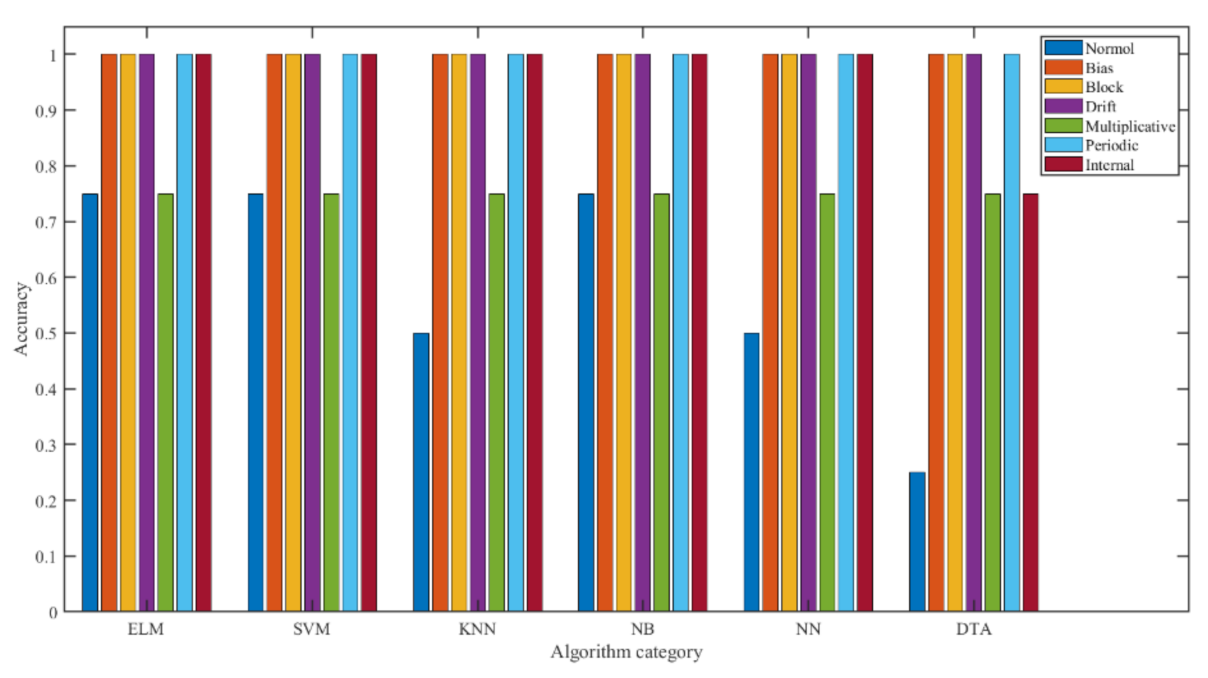
- The platform can generate seven types of signal: normal, bias, blocking, drift, multiplicity, period, and internal fault, and those signals are identified and classified using six algorithms—ELM, SVM, KNN, NB, NN, and DTA—after feature extraction, all of which have good diagnosis and recognition rates.
- (3)
- Although the neural network model can generally achieve good diagnosis and recognition rate when applied to fault diagnosis, there are also some problems, so the platform also reserves various algorithm interfaces for users’ independent programming, so that users can optimize the algorithm by themselves and connect the algorithm to this platform to verify the effectiveness of the algorithm.
2. Dualmass MEMS Gyroscope Fault Diagnosis Platform
Overall Approach
3. The Principle of Dualmass MEMS Gyroscopes
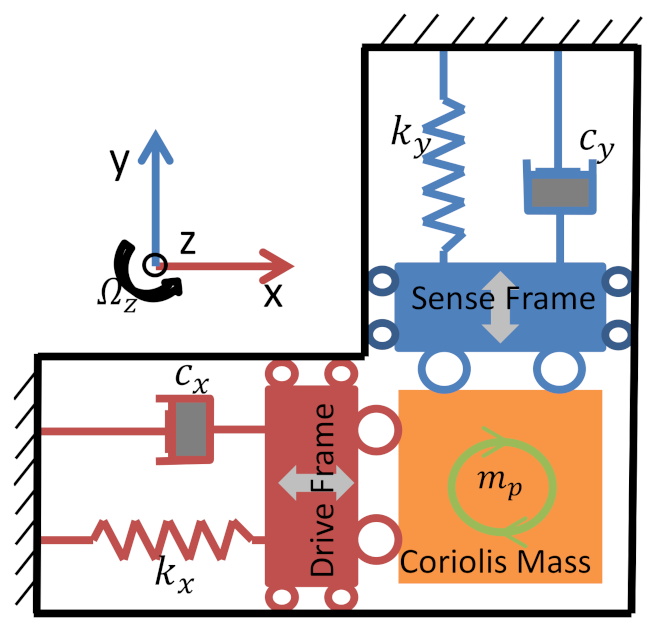
3.1. Structural Model of Dual Mass Silicon Micromechanical Gyroscope
3.2. Dualmass MEMS Gyroscope Monitoring System
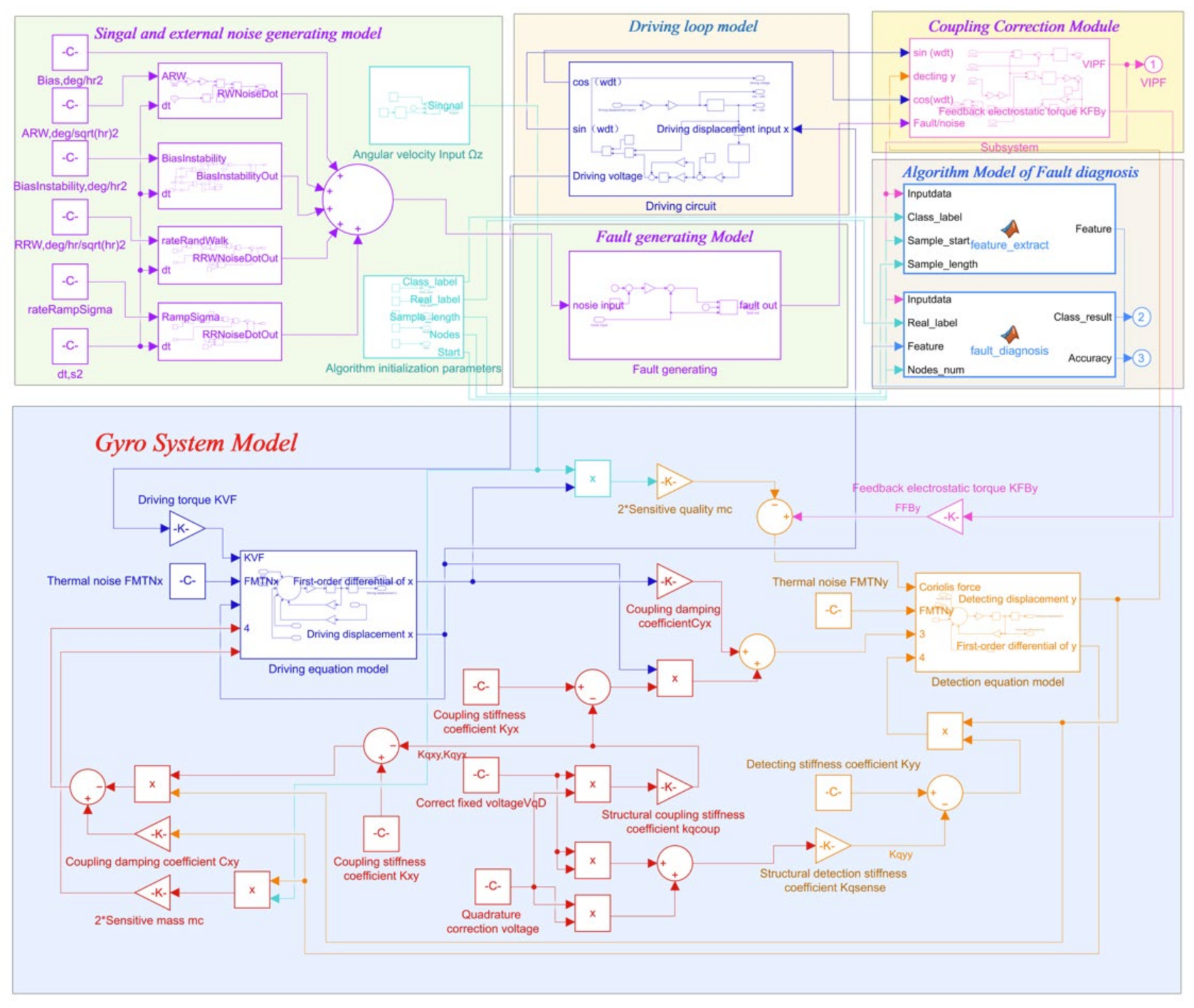
3.3. Platform Model
4. Algorithms
4.1. Variational Mode Decomposition (VMD)
4.2. Sample Entropy (SE)
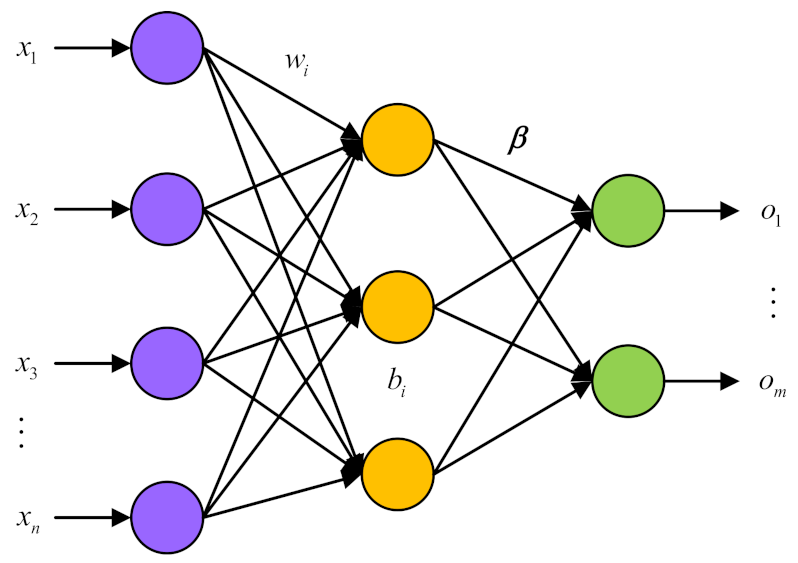
4.3. Extreme Learning Machine (ELM)
4.4. SVM (Support Vector Machine)
5. Simulation and Verification of the Platform Model
5.1. Simulation
5.2. Experiment Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shi, Y.; Wen, X.; Zhao, Y.; Zhao, R.; Cao, H.; Liu, J. Investigation and experiment of high shock packaging technology for High-G MEMS accelerometer. IEEE Sens. J. 2020, 20, 9029–9037. [Google Scholar] [CrossRef]
- Farahani, H.V.; Rahimi, A. Data-Driven Fault Diagnosis for Satellite Control Moment Gyro Assembly with Multiple In-Phase Faults. Electronics 2021, 10, 1537. [Google Scholar] [CrossRef]
- Benjemaa, R.; Elhsoumi, A.; Naoui, S.B.H.A. Active Fault Tolerant Control for uncertain neutral time delay system. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 20–23 July 2020; pp. 285–289. [Google Scholar]
- Beard, R.V. Failure Accommodation in Linear Systems through Self-Reorganization. Ph.D. Thesis, Rept, MVT-71-1, Man Vehicle Laboratory, Cambridge, MA, USA, 1971. [Google Scholar]
- Luo, J.; Wen, G.; Lei, Z.; Su, Y.; Chen, X. Weak signal enhancement for rolling bearing fault diagnosis based on adaptive optimized VMD and SR under strong noise background. Meas. Sci. Technol. 2023, 34, 064001. [Google Scholar] [CrossRef]
- Liu, W.; Li, S.; Chen, M.; Fang, Y.; Cha, L.; Wang, Z. Fault Diagnosis for Attitude Sensors Based on Analytical Redundancy and Wavelet Transform. In Proceedings of the Chinese Automation Congress, Shanghai, China, 6–8 November 2020. [Google Scholar]
- Niu, R.; Liu, W.; Wang, B.; Li, L.; Wang, Z. Fault Diagnosis for Attitude Sensors based on Analytical Redundancy and EMD. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Farahani, H.V.; Rahimi, A. Fault Diagnosis of Control Moment Gyroscope Using Optimized Support Vector Machine. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020. [Google Scholar]
- Liu, Y.; Wu, T.; Chen, J.; Fan, S.; Liu, X.; Gong, Y. Research on Local Mean Decomposition and Extreme Learning Machine based Circuit Breaker Fault Diagnosis Method. In Proceedings of the 2020 Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 28–31 May 2020. [Google Scholar]
- Zhang, W.; Zhang, D.; Zhang, P.; Han, L. A New Fusion Fault Diagnosis Method for Fiber Optic Gyroscopes. Sensors 2022, 22, 2877. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Liu, M.; Sun, Y.; Chen, Z.; Duan, G.; Cao, X. Fault diagnosis of control moment gyroscope based on a new CNN scheme using attention enhanced convolutional block. Sci. China Engl. Version Tech. Sci. 2022, 65, 12. [Google Scholar] [CrossRef]
- Cao, H. Design, Fabrication, and Experiment of a Decoupled Multi-Frame Vibration MEMS Gyroscope. IEEE Sens. J. 2021, 21, 19815–19824. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Shao, X.; Liu, Z.; Kou, Z.; Shan, Y.; Shi, Y.; Shen, C.; Liu, J. Sensing Mode Coupling Analysis for Dualmass MEMS Gyroscope and Bandwidth Expansion within Wide-Temperature Range. Mech. Syst. Signal Process. 2018, 98, 448–464. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Han, Z.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; Liu, J. Pole-Zero Temperature Compensation Circuit Design and Experiment for Dualmass MEMS Gyroscope Bandwidth Expansion. IEEE/ASME Trans. Mechatron. 2019, 24, 677–688. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Liu, J.; Shi, Y.; Tang, J.; Shen, C. An improved interface and noise analysis of a turning fork microgyroscope structure. Mech. Syst. Signal Process. 2016, 70–71, 1209–1220. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; Liu, J. Design and Experiment of Dualmass MEMS Gyroscope Sense Closed System Based on Bipole Compensation Method. IEEE Access 2019, 7, 49111–49124. [Google Scholar] [CrossRef]
- Cao, H.; Xue, R.; Cai, Q.; Gao, J.; Zhao, R.; Shi, Y.; Huang, K.; Shao, X.; Shen, C. Design and Experiment for Dualmass MEMS Gyroscope Sensing closed-loop System. IEEE Access 2020, 8, 48074–48087. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Kou, Z.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; et al. Design, Fabrication and Experiment of Double U-beam MEMS Vibration Ring Gyroscope. Micrimachines 2019, 10, 186. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Li, H.; Kou, Z.; Shi, Y.; Tang, J.; Ma, Z.; Shen, C.; Liu, J. Optimization and experimentation of dualmass MEMS gyroscope quadrature error correction methods. Sensors 2016, 16, 71. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Wang, Y.; Feng, H.; Zhao, R.; Cao, H.; Liu, J. Design, fabrication and test of a low range capacitive accelerometer with anti-overload characteristics. IEEE Access 2020, 8, 26085–26093. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Z.; Zheng, Y.; Guo, H.; Zhao, R.; Shi, Y.; Chou, X.; García, G.-P.A. A New Joint Denoising Algorithm for High-G Calibration of MEMS Accelerometer Based on VMD-PE-Wavelet Threshold. Shock Vib. 2021, 2021, 8855878. [Google Scholar] [CrossRef]
- Chang, L.; Cao, H.; Shen, C. Dualmass MEMS Gyroscope Parallel Denoising and Temperature Compensation Processing Based on WLMP and CS-SVR. Micromachines 2020, 11, 586. [Google Scholar] [CrossRef]
- Shi, J.; Zhou, J.; Feng, J.; Chen, H. Network traffic prediction model based on improved VMD and PSO-ELM. Int. J. Commun. Syst. 2023, 36, e5448. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, L.; Chen, G.; Ding, J. Modified multiscale weighted permutation entropy and optimized support vector machine method for rolling bearing fault diagnosis with complex signals. ISA Trans. 2021, 114, 470–484. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Liu, L.; Wang, X. Humidity Drift Modeling and Compensation of MEMS Gyroscope Based on IAWTD CSVM EEMD Algorithms. IEEE Access 2021, 9, 95686–95701. [Google Scholar] [CrossRef]
- Ni, N.; Dong, S. Numerical Computation of Partial Differential Equations by Hidden-Layer Concatenated Extreme Learning Machine. J. Sci. Comput. 2022, 95, 35. [Google Scholar] [CrossRef]
- Yu, R.; Li, X.; Tao, M.; Ke, Z. Fault Diagnosis of Feedwater Pump in Nuclear Power Plants Using Parameter-Optimized Support Vector Machine. In Proceedings of the 2016 24th International Conference on Nuclear Engineering, Charlotte, NC, USA, 26–30 June 2016. [Google Scholar]
- Kalita, K. Analyzing Physics-Inspired Metaheuristic Algorithms in Feature Selection with K-Nearest-Neighbor. Appl. Sci. 2023, 13, 906. [Google Scholar]
- Redivo, E.; Viroli, C.; Farcomeni, A. Quantile distribution functions and their use for c1assification with app1ication to nave bayes c1assifiers. Stat. Comput. 2023, 33, 55. [Google Scholar] [CrossRef]
- Alrashidi, M. Estimation of Weibull Distribution Parameters for Wind Speed Characteristics Using Neural Network Algorithm. CMC Comput. Mater. Con. 2023, 75, 1073–1088. [Google Scholar] [CrossRef]
- Hassanien, A.E. Classification and Feature Selection of Breast Cancer Data Based on Decision Tree Algorithm. Stud. Inform. Control. 2003, 12, 33–40. [Google Scholar]
- Cao, H.; Wei, W.; Liu, L.; Ma, T.; Zhang, Z.; Zhang, W.; Shen, C.; Duan, X. A Temperature Compensation Approach for Dualmass MEMS Gyroscope Based on PE LCD and ANFIS. IEEE Access 2021, 9, 95180–95193. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Sheng, X.; Wang, S.; Yang, B.; Huang, L. A novel temperature compensation method for MEMS gyroscope’s oriented on periphery circuit. Int. J. Adv. Robot. Syst. 2013, 10, 327. [Google Scholar] [CrossRef]
- Cao, H.; Li, H. Investigation of a vacuum packaged MEMS gyroscope architecture’s temperature robustness. Int. J. Appl. Electromagn. Mech. 2013, 41, 495–506. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Shen, C.; Liu, Y.; Wang, X. Temperature Energy Influence Compensation for MEMS Vibration Gyroscope Based on RBF NN-GA-KF Method. Shock. Vib. 2018, 2018, 2830686. [Google Scholar] [CrossRef]
- Ma, T.; Li, Z.; Cao, H.; Shen, C.; Wang, Z. A Parallel Denoising Model for Dualmass MEMS Gyroscope Based on PE-ITD and SA-ELM. IEEE Access 2019, 7, 113901–113915. [Google Scholar]
- Ma, T.; Cao, H.; Shen, C. A Temperature Error Parallel Processing Model for MEMS Gyroscope Based on a Novel Fusion Algorithm. Electronics 2020, 9, 499. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, R.; Ma, T.; Zhang, W.; Zhang, M.; Chang, L.; Wang, Z.; Xu, J.; Wei, W.; Cao, H. A New Dual-Mass MEMS Gyroscope Fault Diagnosis Platform. Micromachines 2023, 14, 1177. https://doi.org/10.3390/mi14061177
Cui R, Ma T, Zhang W, Zhang M, Chang L, Wang Z, Xu J, Wei W, Cao H. A New Dual-Mass MEMS Gyroscope Fault Diagnosis Platform. Micromachines. 2023; 14(6):1177. https://doi.org/10.3390/mi14061177
Chicago/Turabian StyleCui, Rang, Tiancheng Ma, Wenjie Zhang, Min Zhang, Longkang Chang, Ziyuan Wang, Jingzehua Xu, Wei Wei, and Huiliang Cao. 2023. "A New Dual-Mass MEMS Gyroscope Fault Diagnosis Platform" Micromachines 14, no. 6: 1177. https://doi.org/10.3390/mi14061177