
Experimental Research of Triple Inertial Navigation System Shearer Positioning
Abstract
:1. Introduction
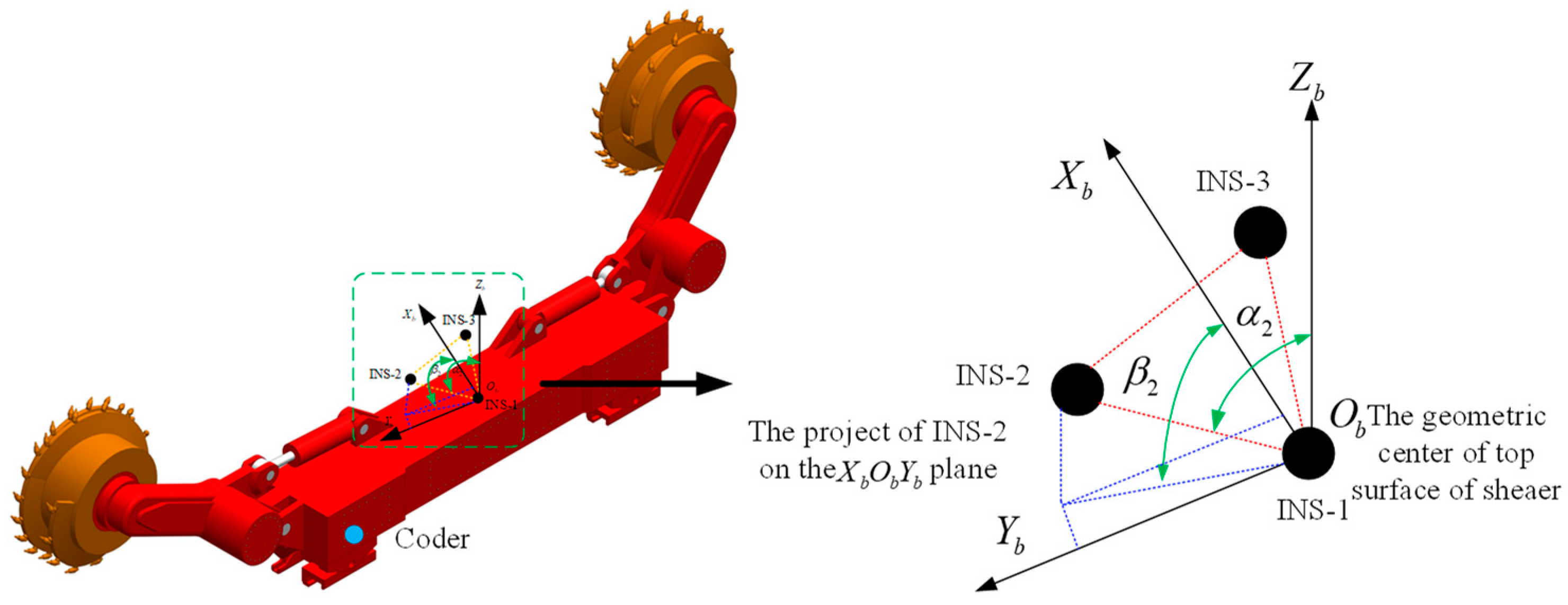
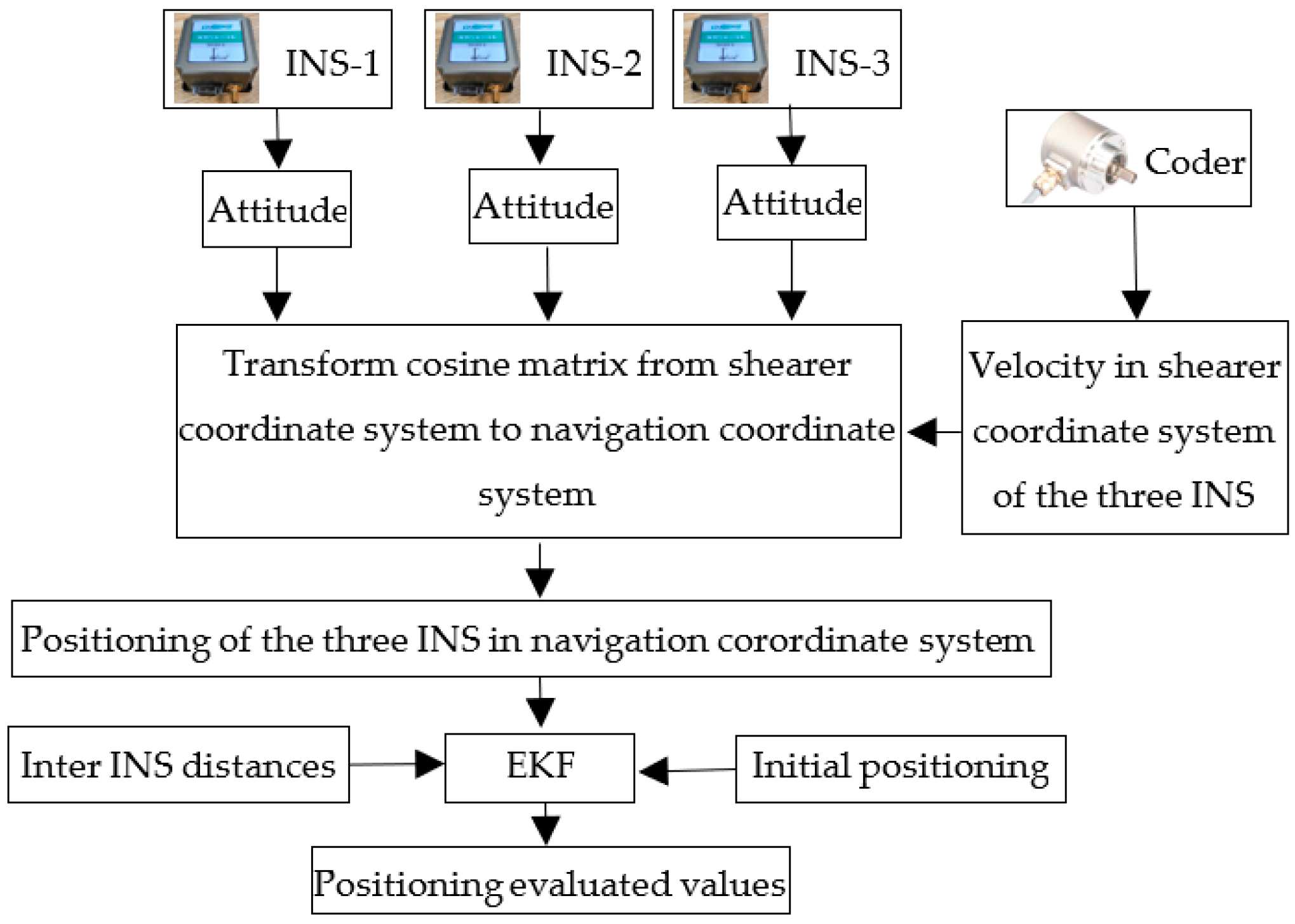
2. The TINS Positioning Principle of Shearers
3. Experimental Device and Methods
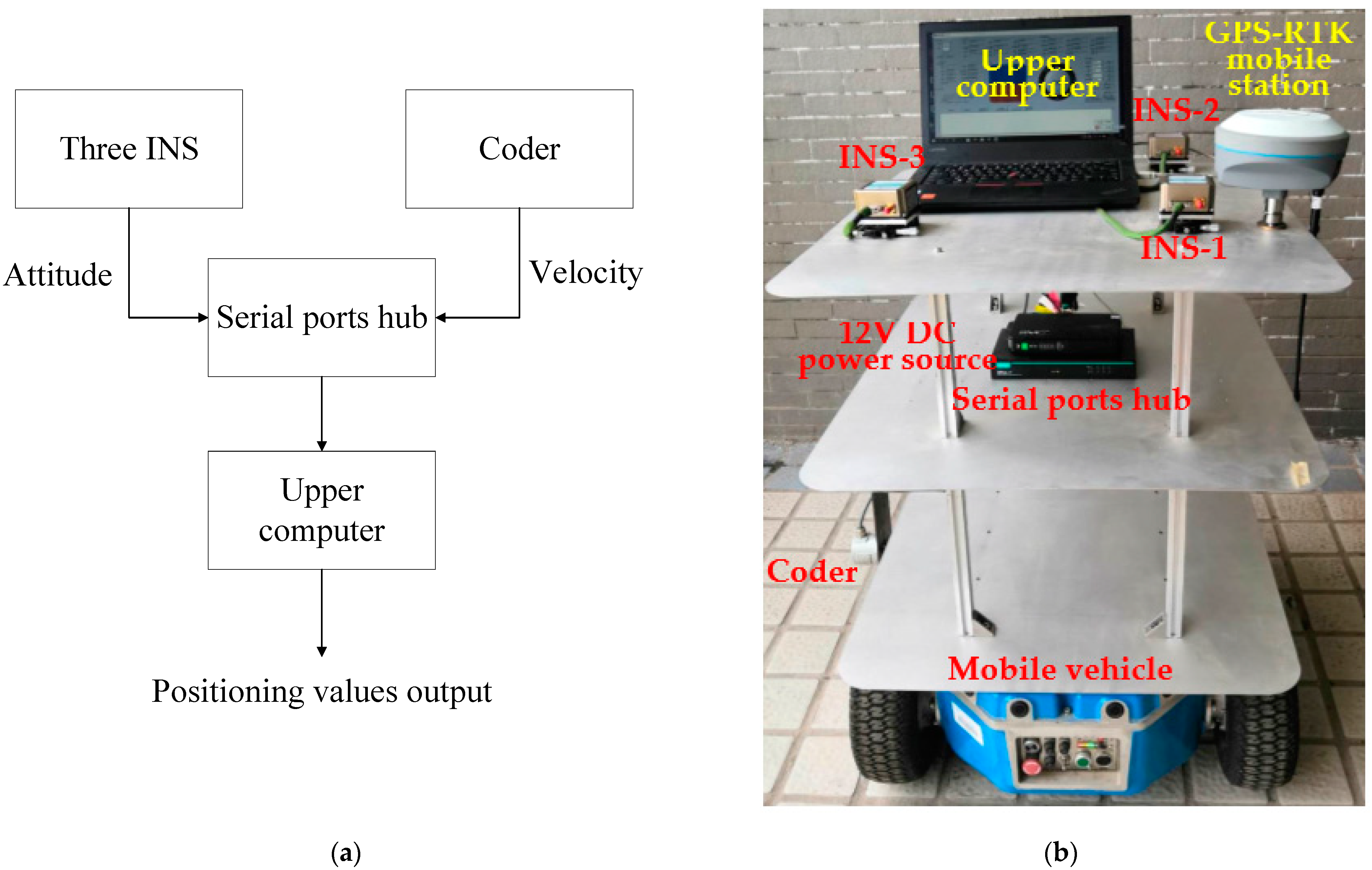
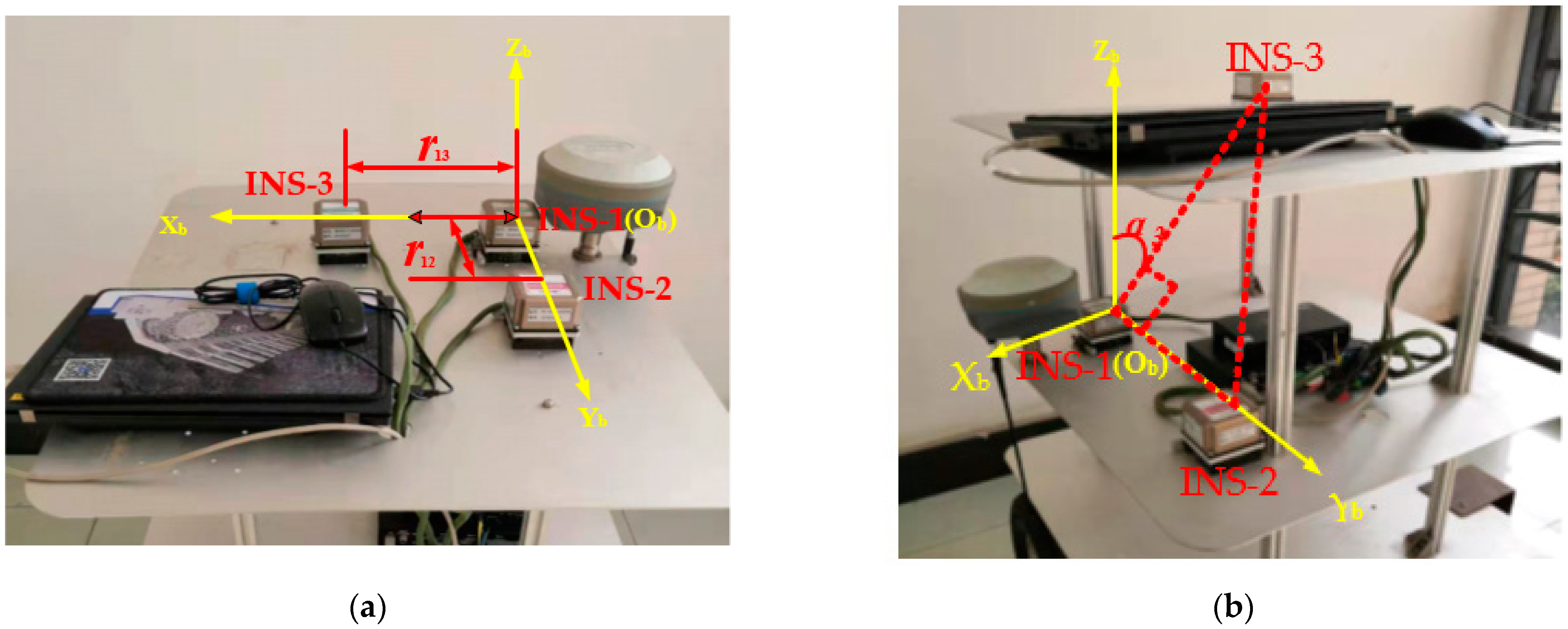
3.1. Experimental Device
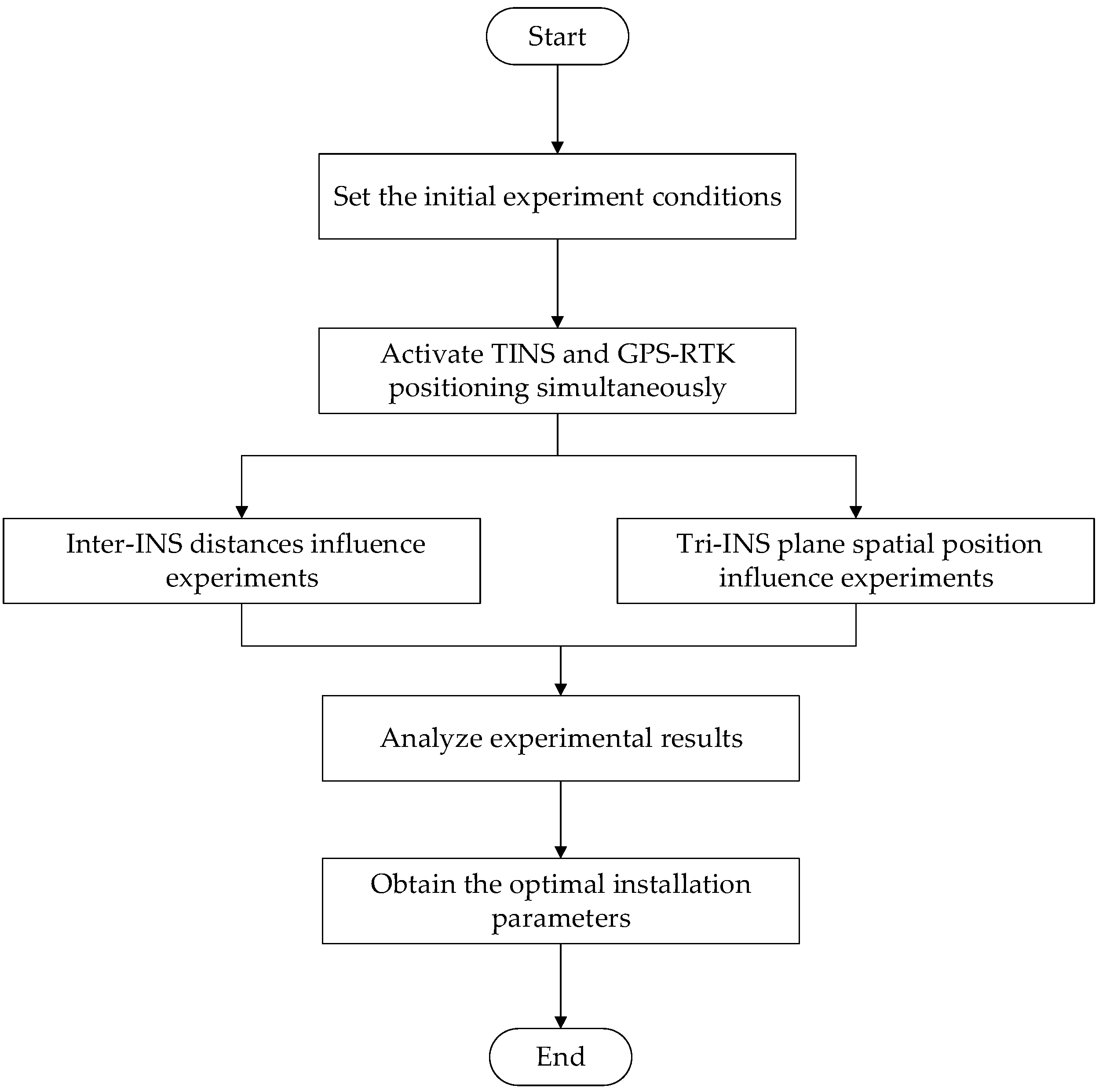
3.2. Methods
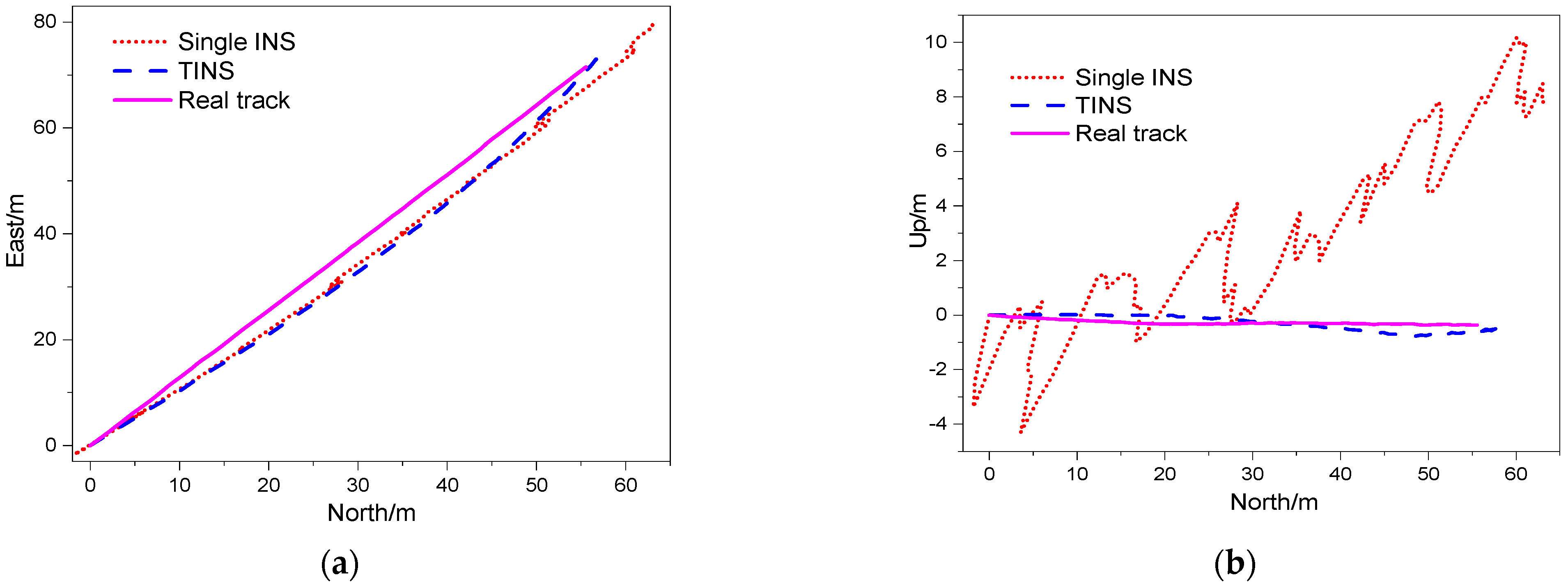
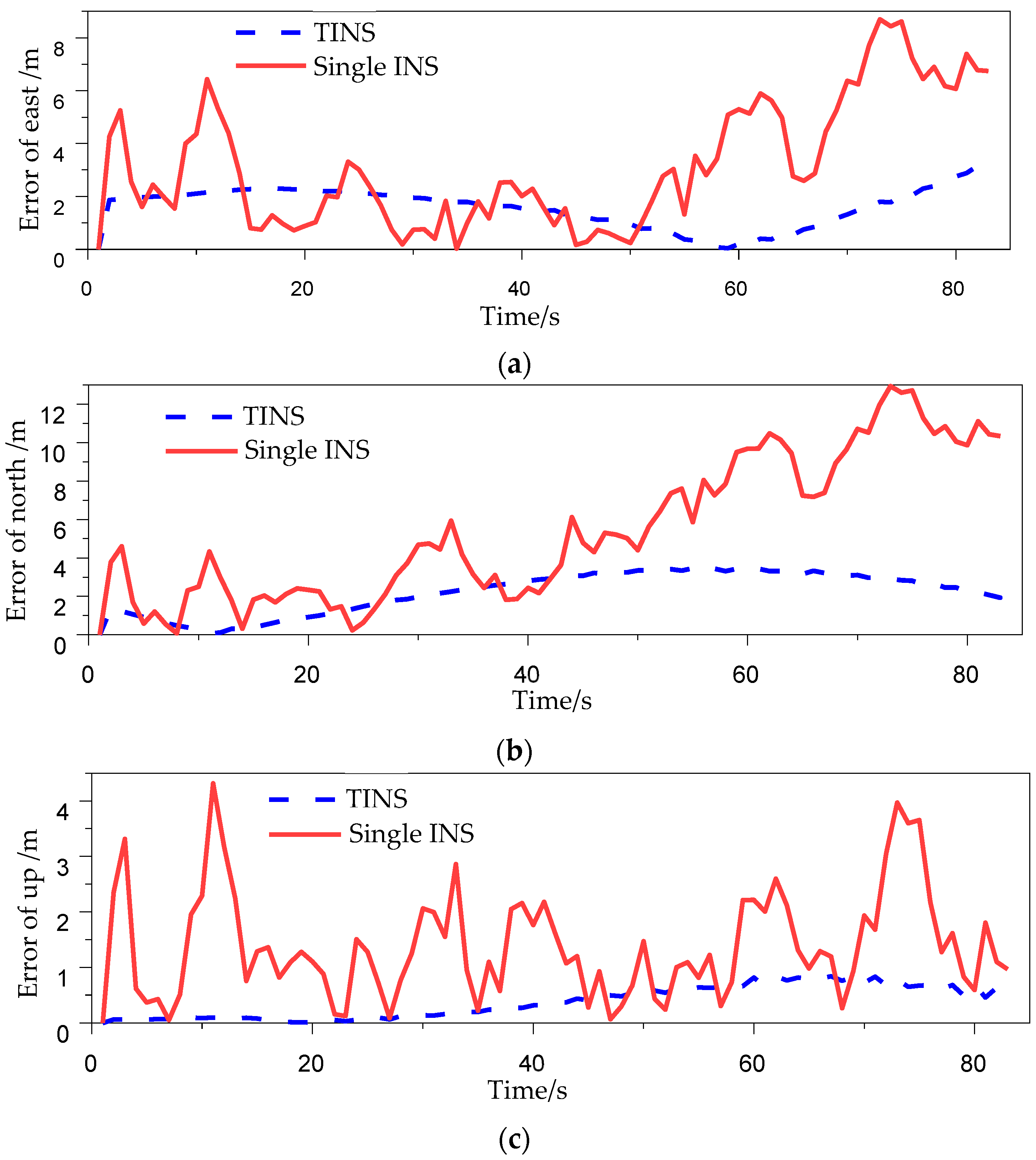
4. Results and Discussions
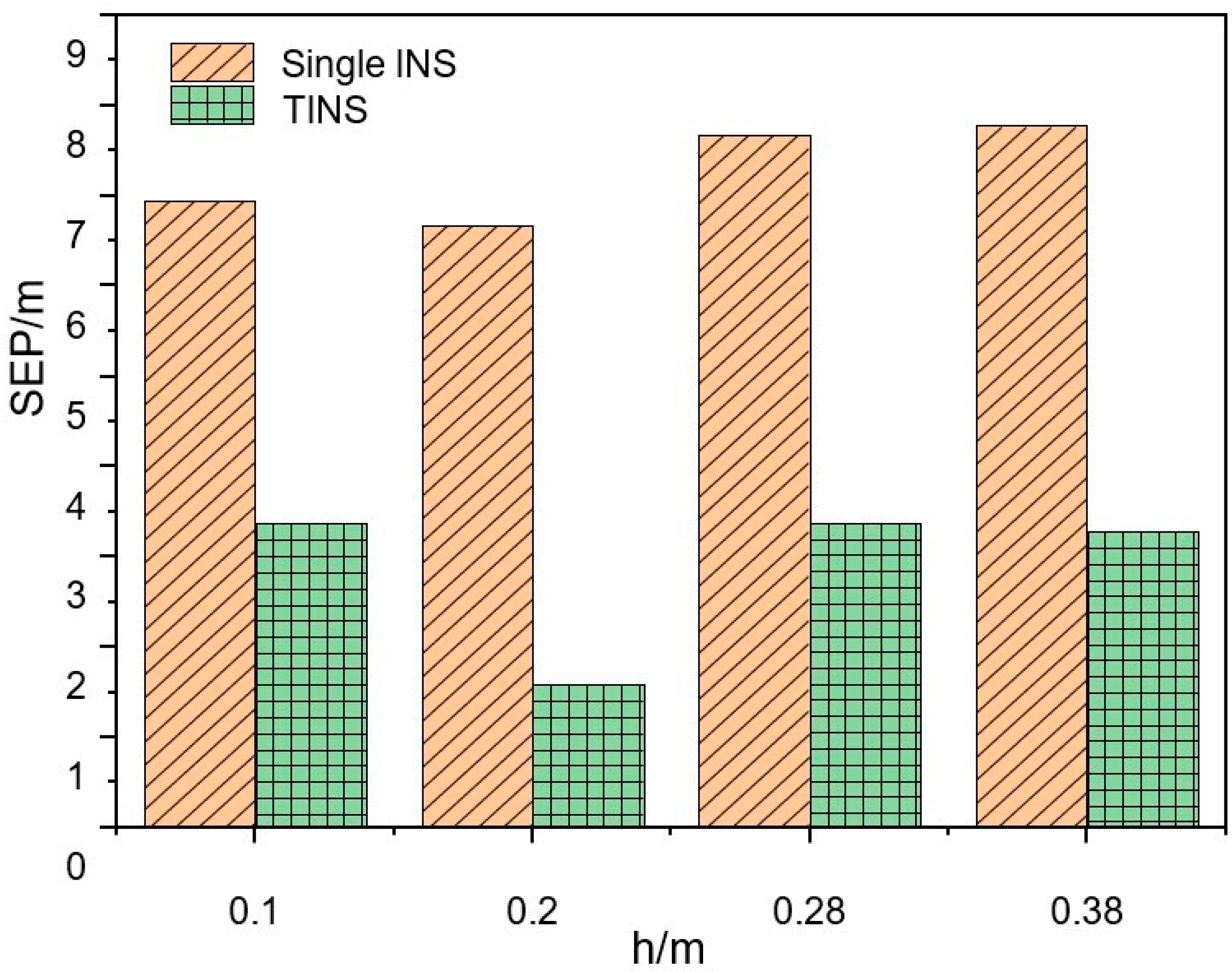
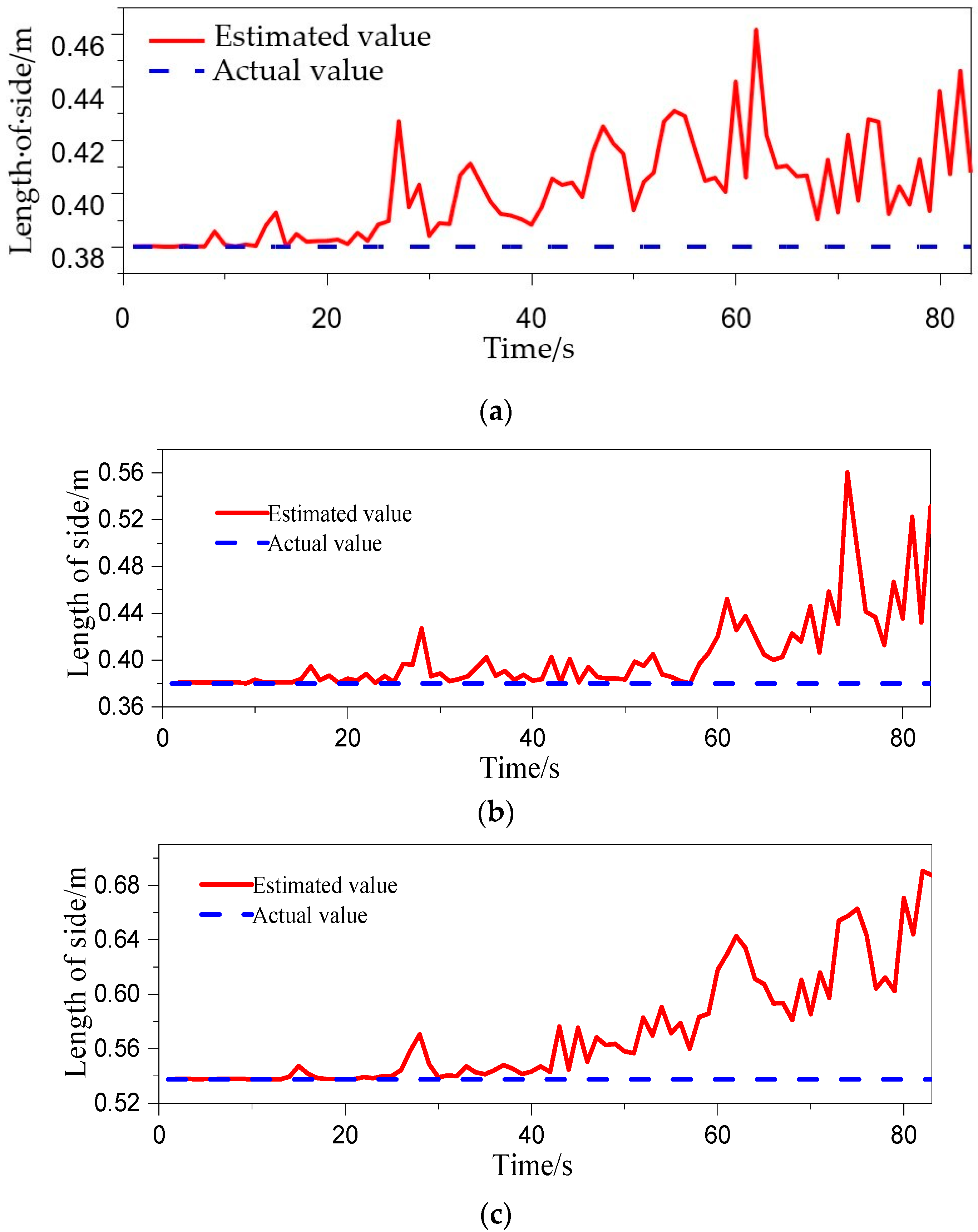
4.1. Inter-INS Distances Influence Experiments
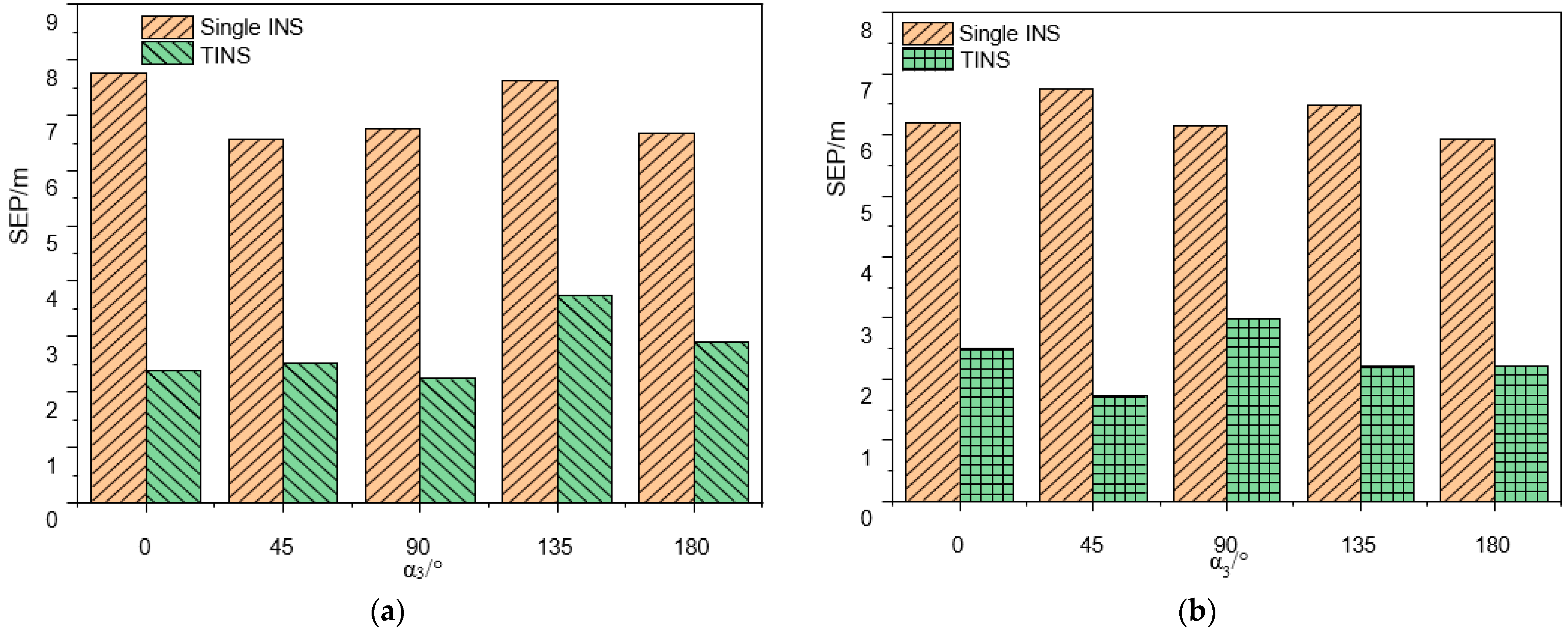
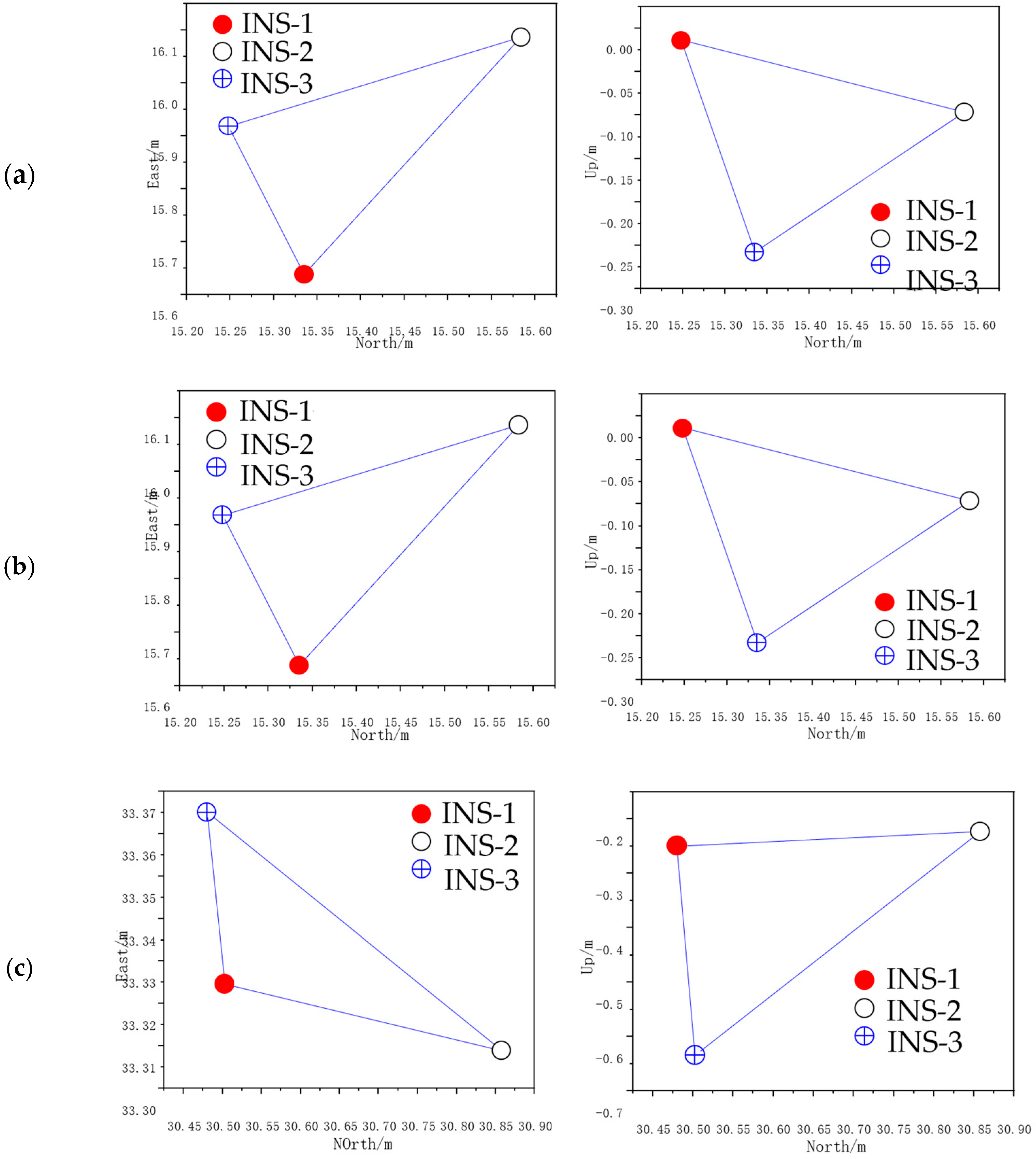
4.2. The Tri-INS Plane Spatial Position Influence Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ge, S.; Hao, X.; Tian, K. Principle and key technology of autonomus navigation cutting for deep coal seam. J. China Coal Soc. 2021, 46, 774–788. [Google Scholar]
- Ge, S.; Wang, S.; Cao, B. Autonomous positiong principle and technology of intelligent shearer and conveyor. J. China Coal Soc. 2022, 47, 75–86. [Google Scholar]
- Wang, S.; Ge, S.; Wang, S. Development and chanllege of unmanned autonomous longwall fully-mechanized coal ming face. Coal Sci. Technol. 2022, 50, 231–243. [Google Scholar]
- Reid, D.C.; Dunn, M.T.; Reid, P.B. A practical inertial navigation solution for continuous miner automation. Coal Oper. Conf. 2012, 12, 114–119. [Google Scholar]
- Dunn, M.T.; Thompson, J.P.; Reid, P.B. High accuracy inertial navigation for underground mining machinery. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Republic of Korea, 20–24 August 2012; pp. 1179–1183. [Google Scholar]
- Ralston, J.C.; Reid, D.C.; Dunn, M.T. Longwall automation: Delivering enabling technology to achieve safer and more productive underground mining. Int. J. Min. Sci. Technol. 2015, 25, 865–876. [Google Scholar] [CrossRef]
- Li, A.; Hao, S.; Wang, S. Experimental Study on Shearer Positioning Method Based on SINS and Encoder. Coal Sci. Technol. 2016, 44, 95–100. [Google Scholar]
- Wang, S.; Wang, S.; Boyuan, Z. Dynamic Zero-velocity Update Technology to Shearer Inertial Navigation Positioning. J. China Coal Soc. 2018, 43, 578–583. [Google Scholar]
- Wang, S.; Zhang, B.; Wang, S. Dynamic Precise Positioning Method of Shearer Based on Closing Path Optimal Estimation Model. IEEE Trans. Autom. Sci. Eng. 2018, 16, 1468–1475. [Google Scholar]
- Cheng, L.; Wang, S.; Ge, S. Redundant Multi-INS positioning algorithm of shearer and analysis of its rationality. J. China Coal Soc. 2019, 44, 746–753. [Google Scholar]
- Wang, S. Research on shearer positioning with double-INS. Sens. Rev. 2019, 39, 577–584. [Google Scholar] [CrossRef]
- Wang, S. Research on Shearer Positioning Technology with Heterogeneous Multi-Source Information Fusion. Ph.D. Thesis, China University of Minging and Technology, Xuzhou, China, 2022. [Google Scholar]
- Cao, B. Research on Fusion Localization Approach of IMU and Ultra-Wideband for Shearer. Ph.D. Thesis, China University of Minging and Technology, Xuzhou, China, 2022. [Google Scholar]
- Cao, B.; Wang, S.; Ge, S. Research on Sheaer Positioning Experiment Based on IMU and UWB at the end of Underground Coal Mining Working Face. Coal Sci. Technol. 2022, 51, 217–228. [Google Scholar] [CrossRef]
- Wang, S.; Wang, S. Improving the shearer positioning accuracy using the shearer motion constraints in longwall panels. IEEE Access 2020, 8, 52466–52474. [Google Scholar] [CrossRef]
- Reid, D.; Ralston, J.; Dunn, M. Longwall shearer automation: From research to reality. In Machine Vision and Mechatronics in Practice; Springer: Berlin/Heidelberg, Germany, 2015; pp. 49–57. [Google Scholar]
- Ralston, J.; Reid, D.C.; Hargrave, C. Sensing for advancing mining automation capability: A review of underground automation technology development. Int. J. Min. Sci. Technol. 2014, 24, 305–310. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H.; Wu, X. The Research on Dynamic Calibration for Accelermeter Zero of Shipborne Double INS. Radio Eng. 2015, 45, 30–33. [Google Scholar]
- Zhang, L.; Wang, X. Research on data dispose of multiple INS configuration navigation system on ships. Ship Sci. Technol. 2021, 43, 176–179. [Google Scholar]
- Bai, J.; Chang, M.; Wang, H. Simulation Study and Analysis on the Multi-Inertial Navigation Fusion Scheme in Aircraft Navigation System. Unmanned Syst. Technol. 2020, 3, 79–91. [Google Scholar]
- Si, F.; Zhao, Y.; Zhang, X. The estimation of wing flexure deformation in transfer alignment based on inertial sensors network. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–11. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Range | Zero-Bias Stability | Distinguishability | In-Band Noise | Attitude Accuracy |
|---|---|---|---|---|
| ±300°/s | ≤18°/h | 0.03°/s | 0.3°/s | <0.3 deg (RMS) |
| Inter-INS Distances Influence Experiments | Tri-INS Plane Spatial Position Influence Experiments | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positive Plane | Negative Plane | |||||||||||||
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| r12 | 0.1 m | 0.2 m | 0.28 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m |
| r13 | 0.1 m | 0.2 m | 0.28 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m | 0.38 m |
| α3 | 90° | 90° | 90° | 90° | 0° | 45° | 90° | 135° | 180° | 0° | 45° | 90° | 135° | 180° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Wang, S.; Shin, K.; Dong, W.; Li, W. Experimental Research of Triple Inertial Navigation System Shearer Positioning. Micromachines 2023, 14, 1474. https://doi.org/10.3390/mi14071474
Lu C, Wang S, Shin K, Dong W, Li W. Experimental Research of Triple Inertial Navigation System Shearer Positioning. Micromachines. 2023; 14(7):1474. https://doi.org/10.3390/mi14071474
Chicago/Turabian StyleLu, Cheng, Shibo Wang, Kyoosik Shin, Wenbin Dong, and Wenqi Li. 2023. "Experimental Research of Triple Inertial Navigation System Shearer Positioning" Micromachines 14, no. 7: 1474. https://doi.org/10.3390/mi14071474