
Remaining Useful Lifetime Prediction Based on Extended Kalman Particle Filter for Power SiC MOSFETs

Abstract
:1. Introduction
2. SiC MOSFET Failure Precursor and Test Setup
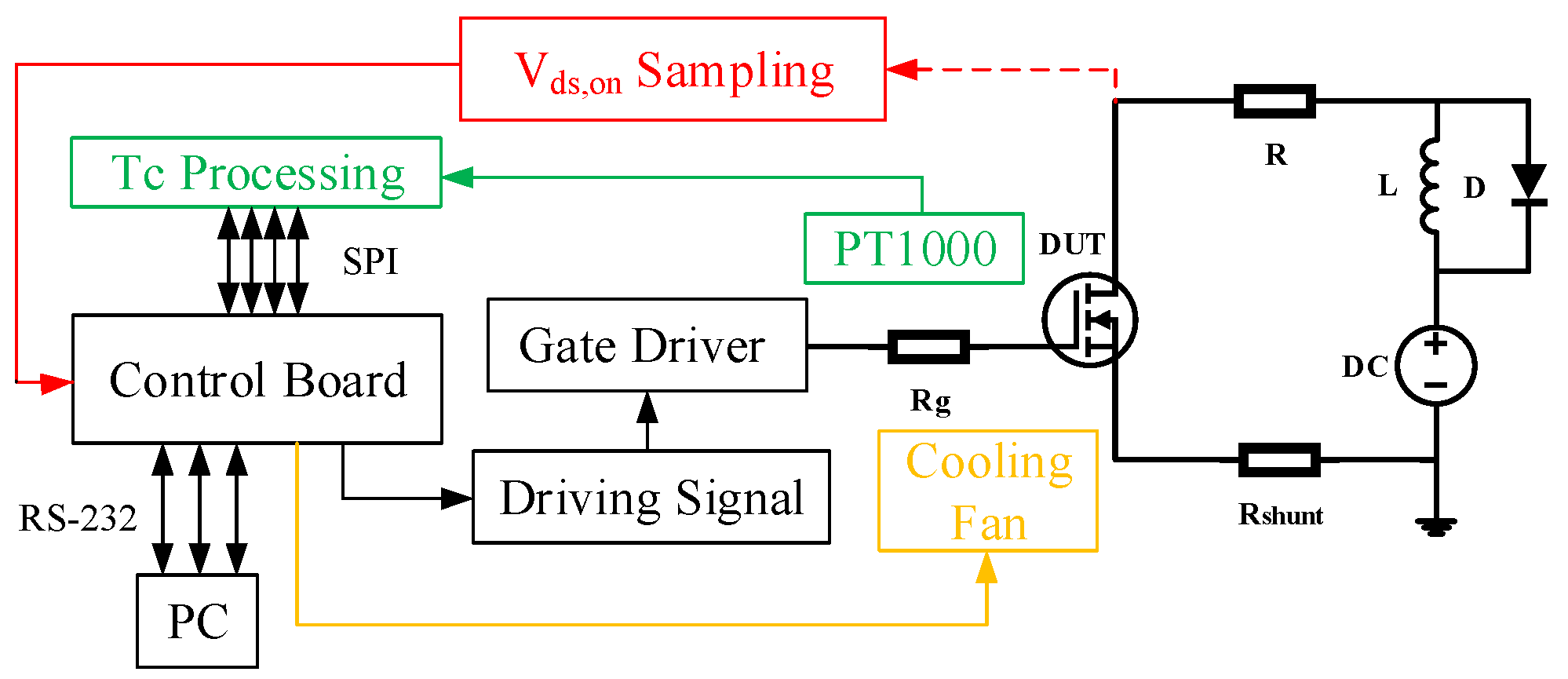
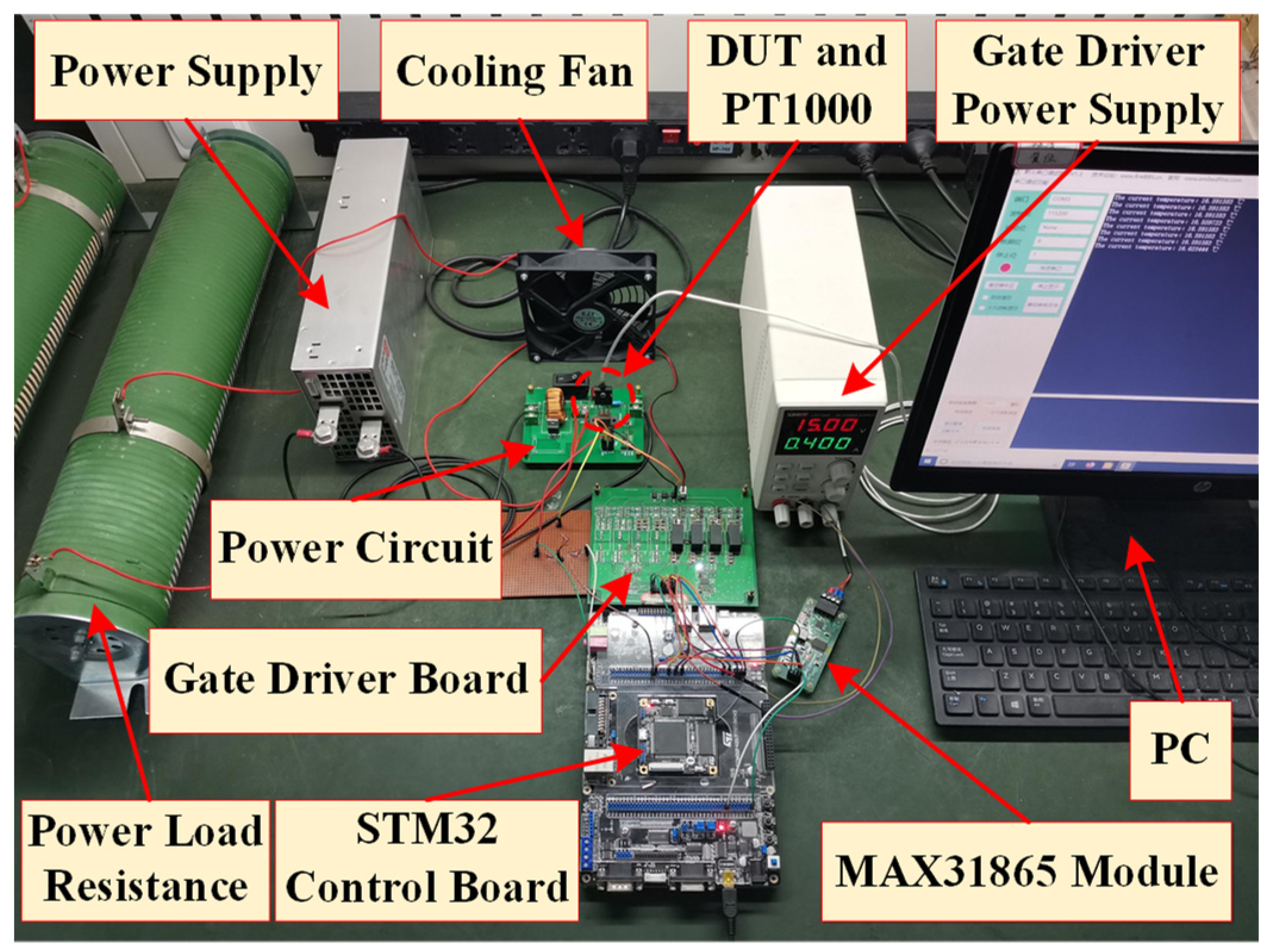
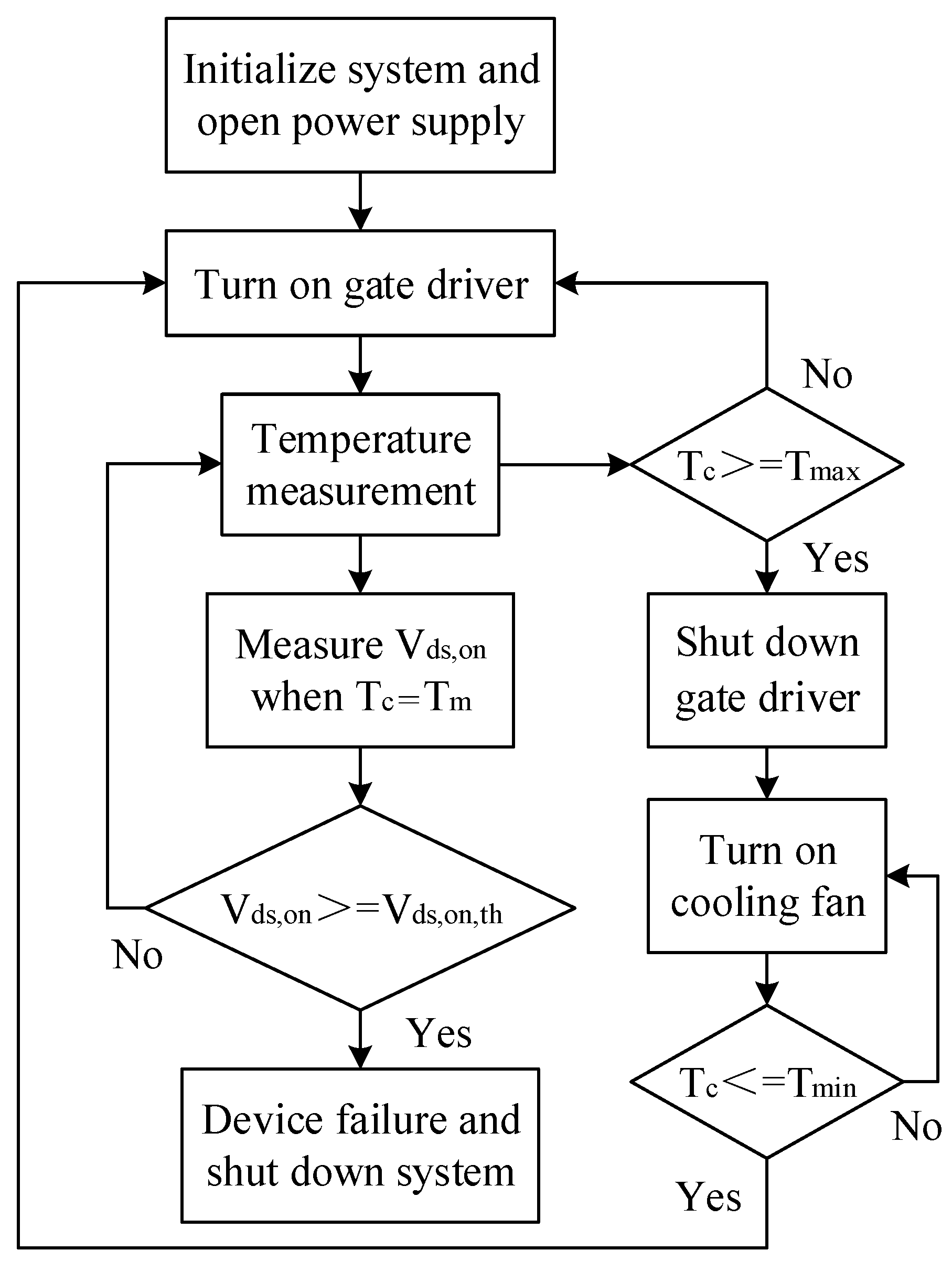
2.1. Experimental Setup
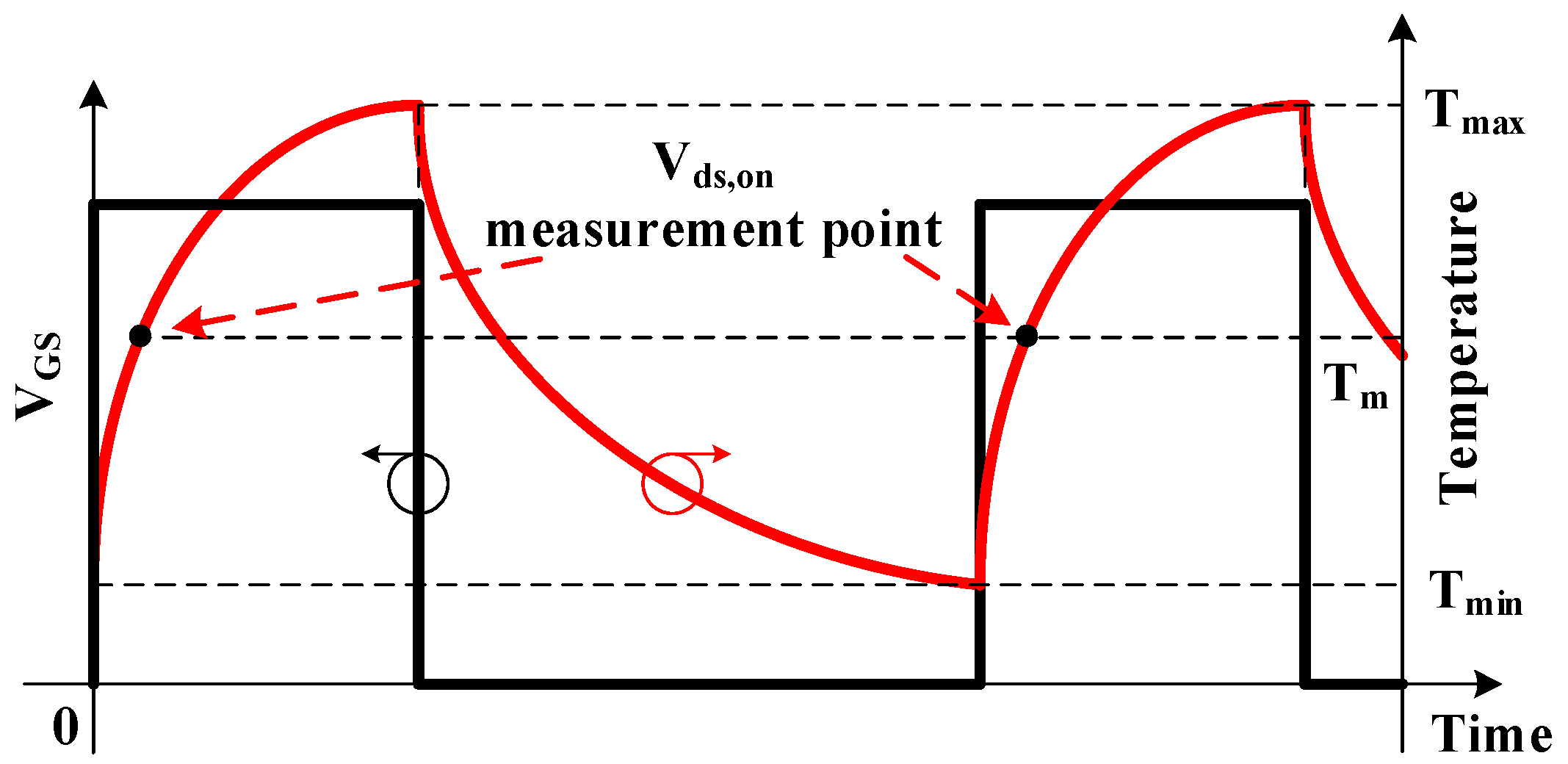
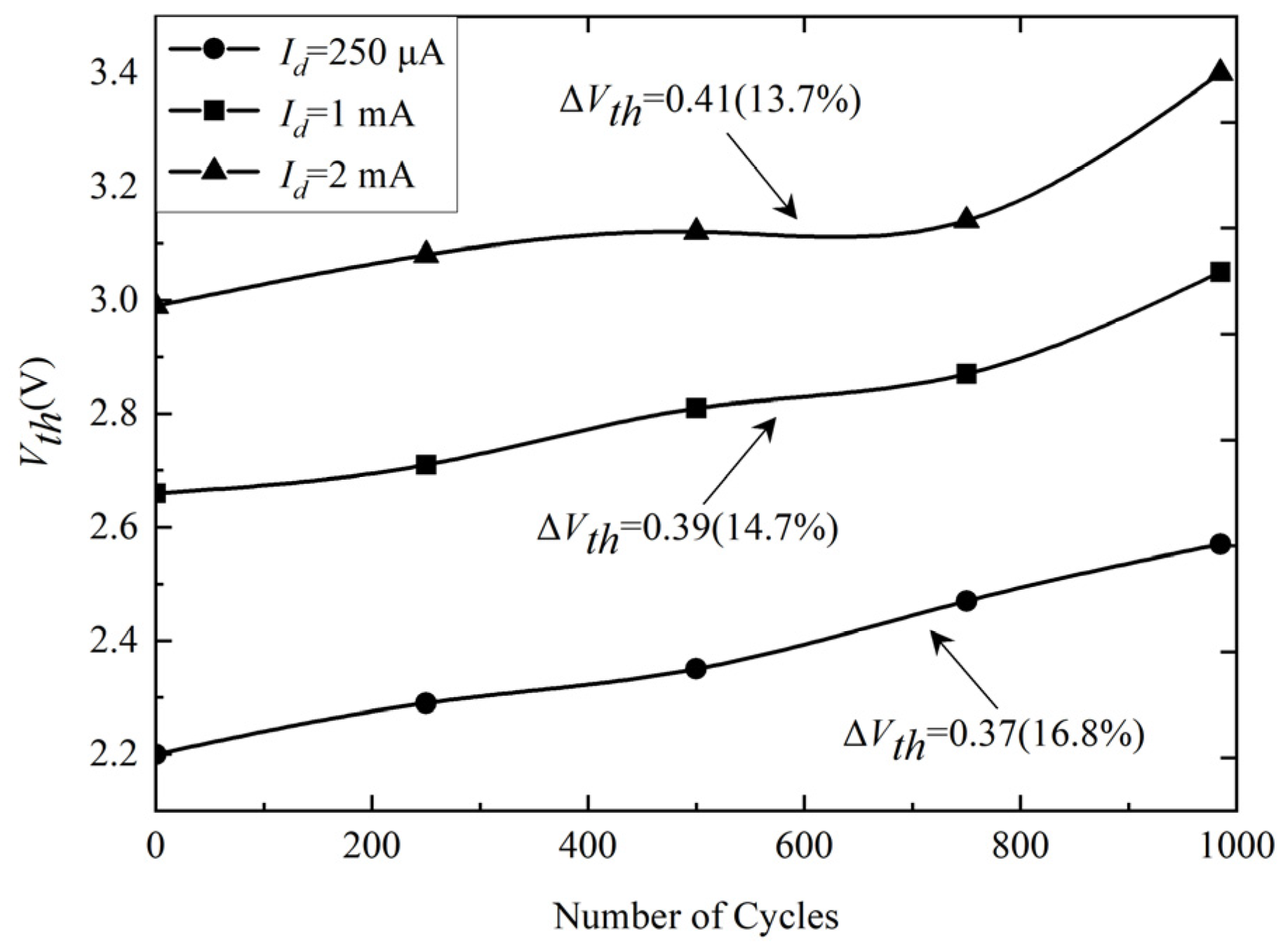
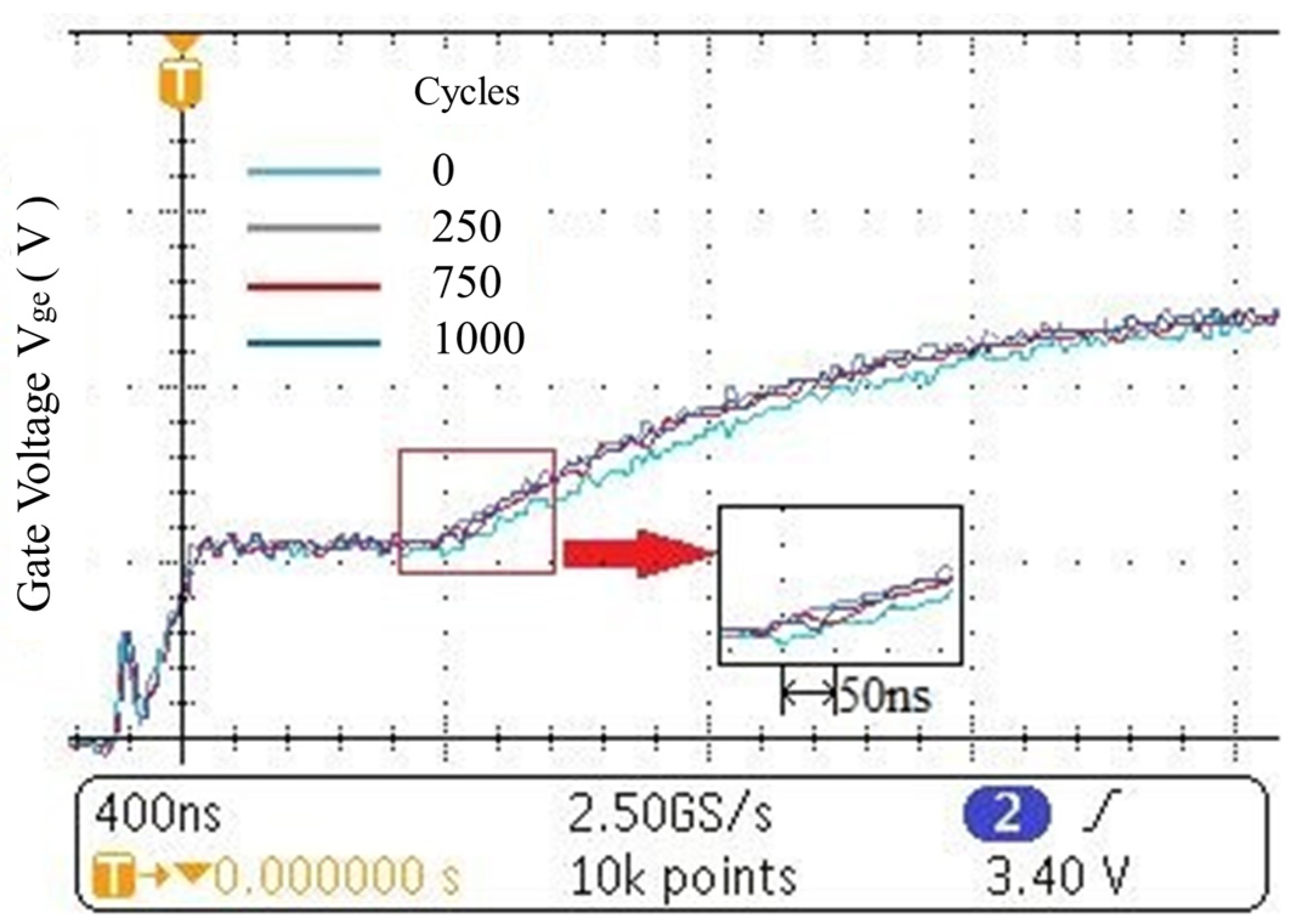
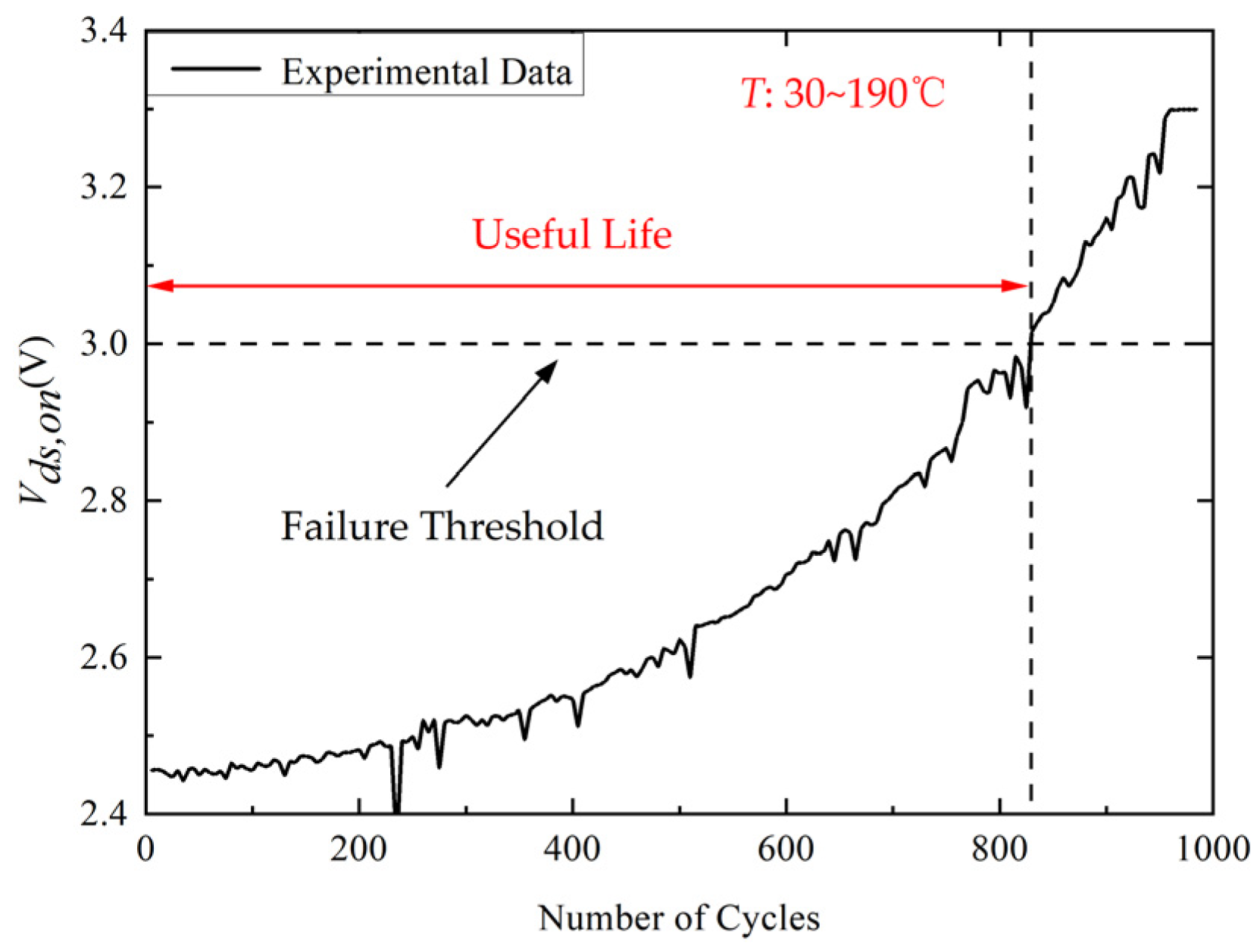
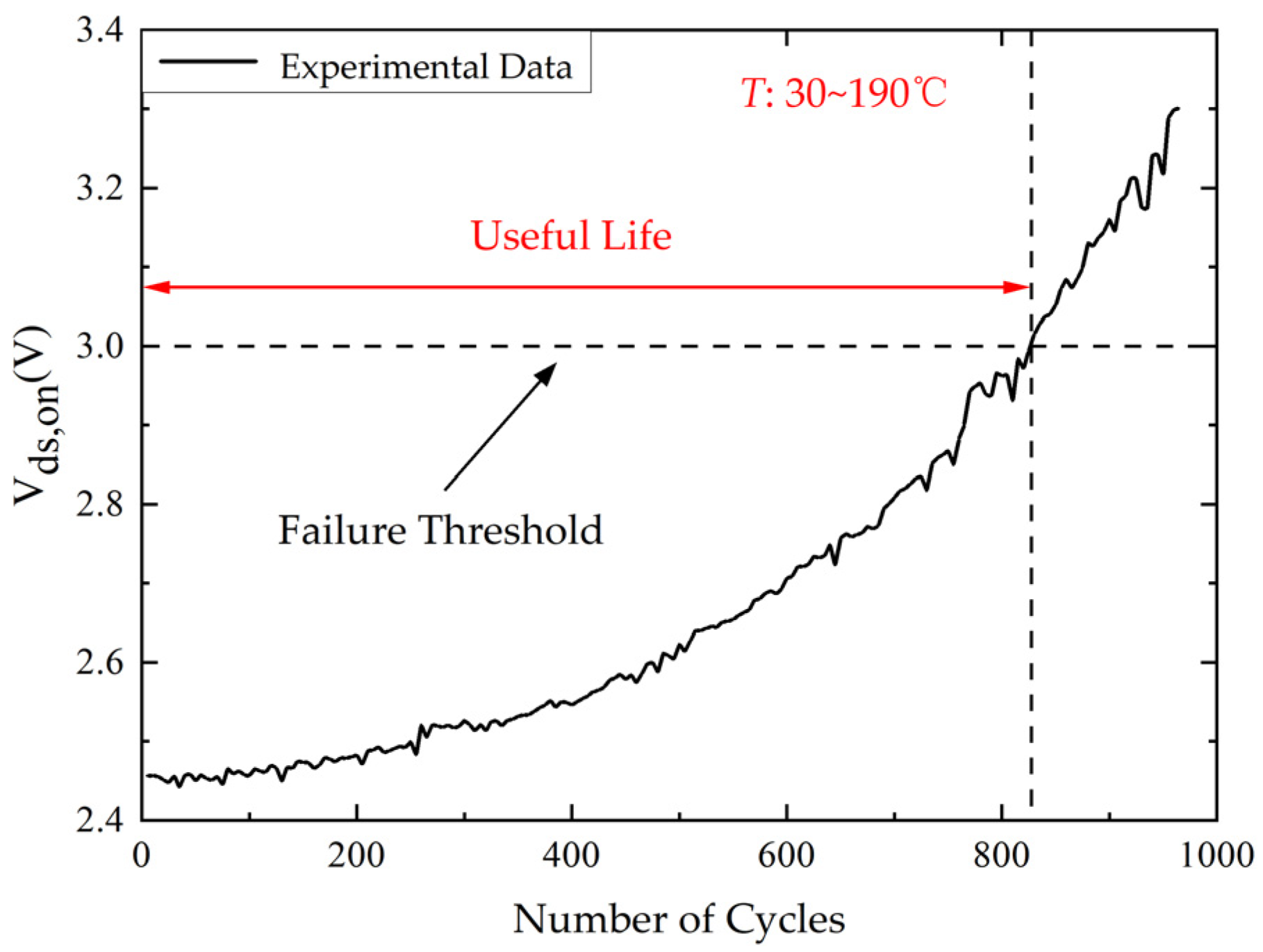
2.2. Failure Precursor
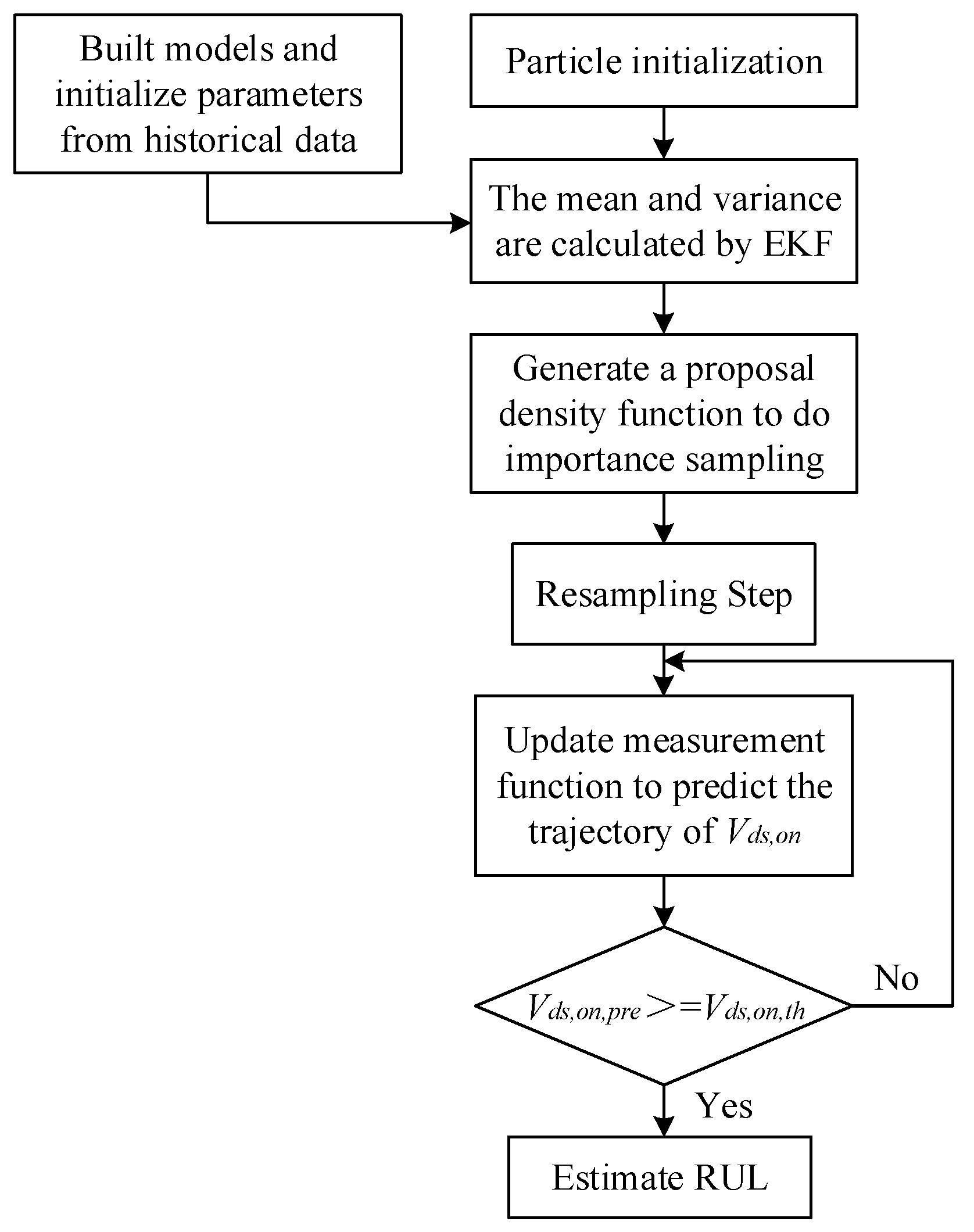
3. Extended Kalman Particle Filter
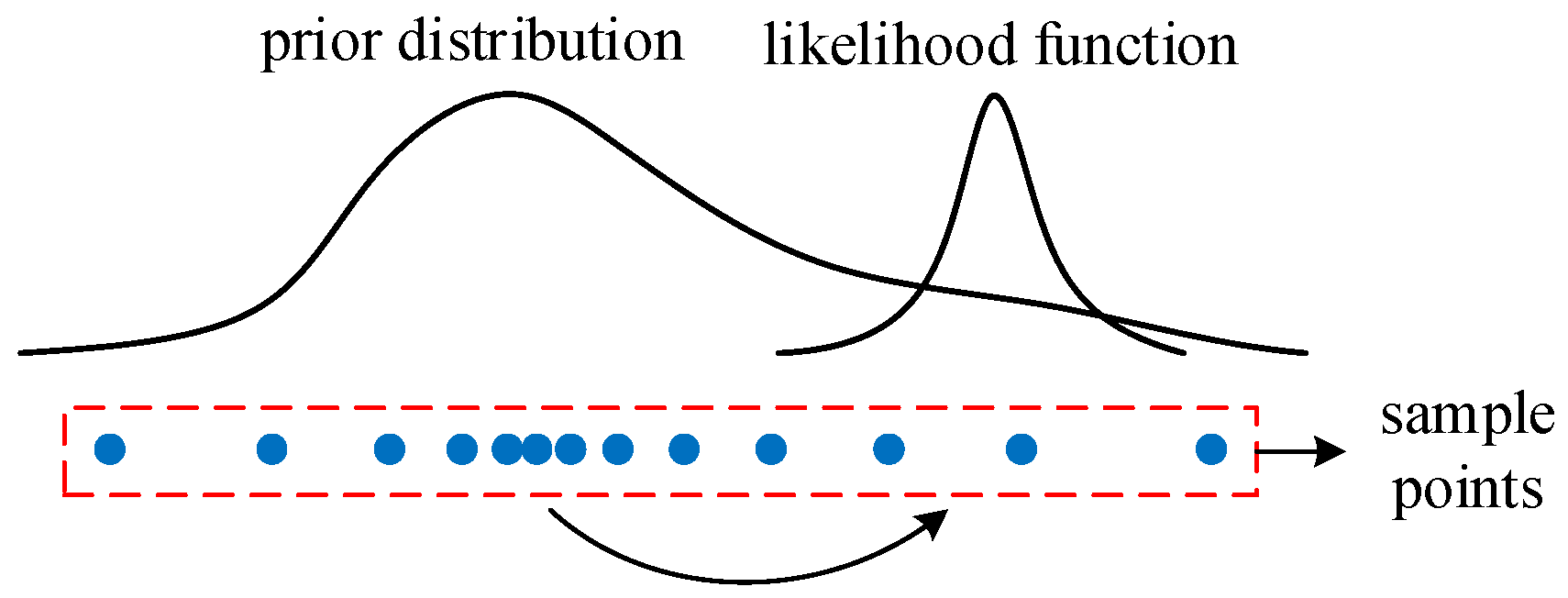
3.1. The Particle Filter Algorithm
3.2. Extended Kalman Particle Filter
- (1)
- Increase the number of particles
- (2)
- Resampling
- (3)
- Choose a reasonable proposal density function
4. Remaining Useful Lifetime Prediction
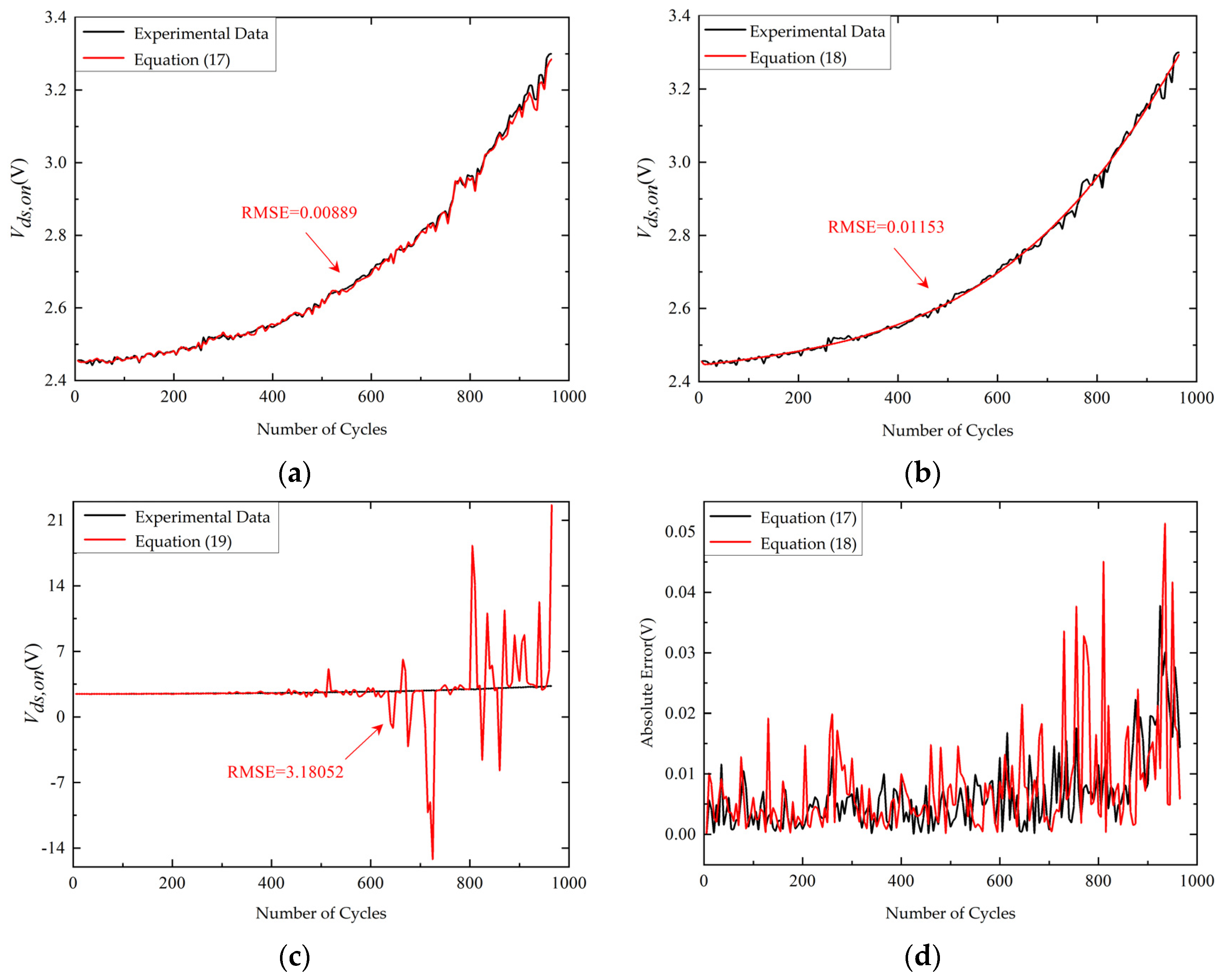
4.1. Processing of Experimental Results and Selection of Degradation Model
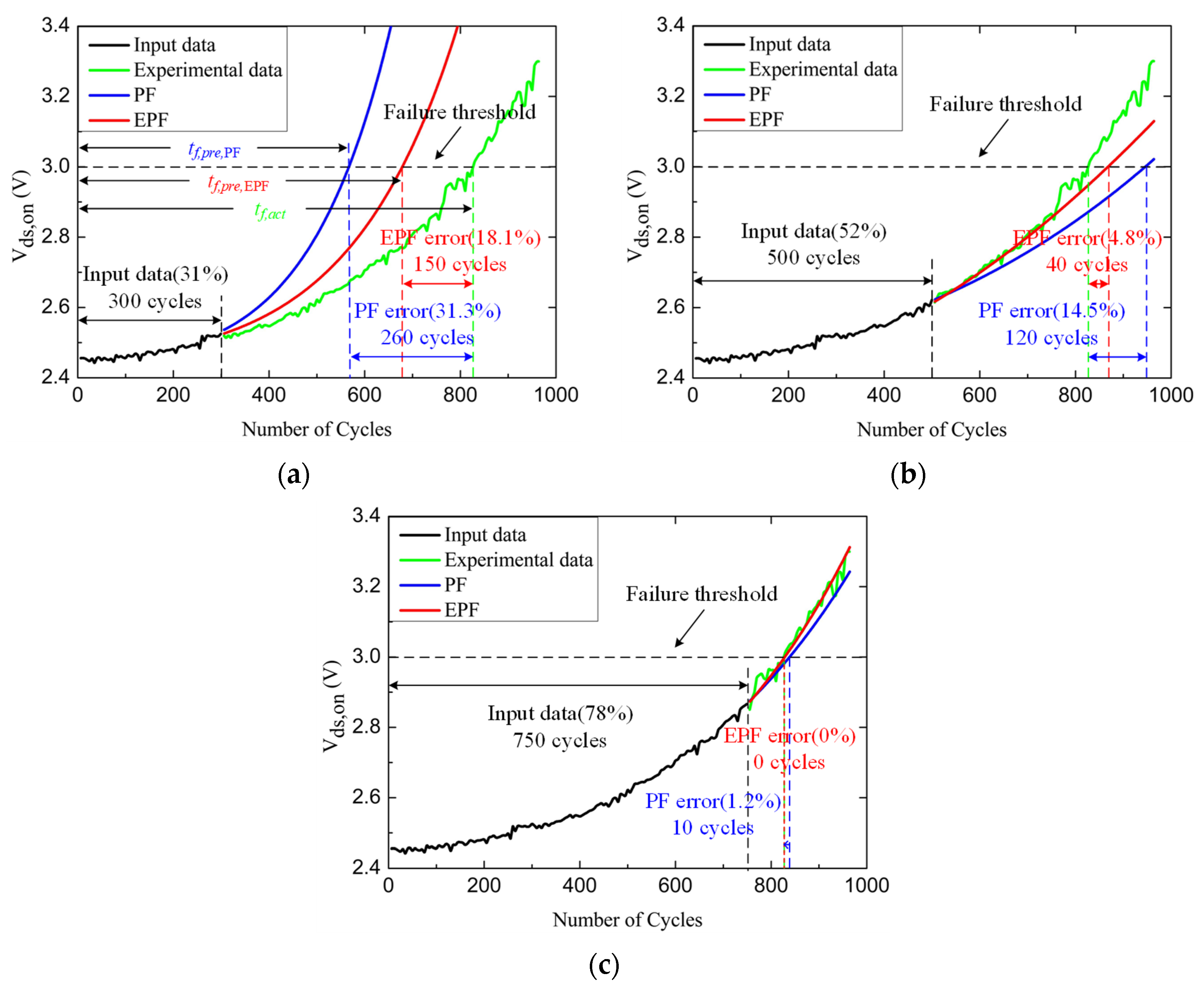
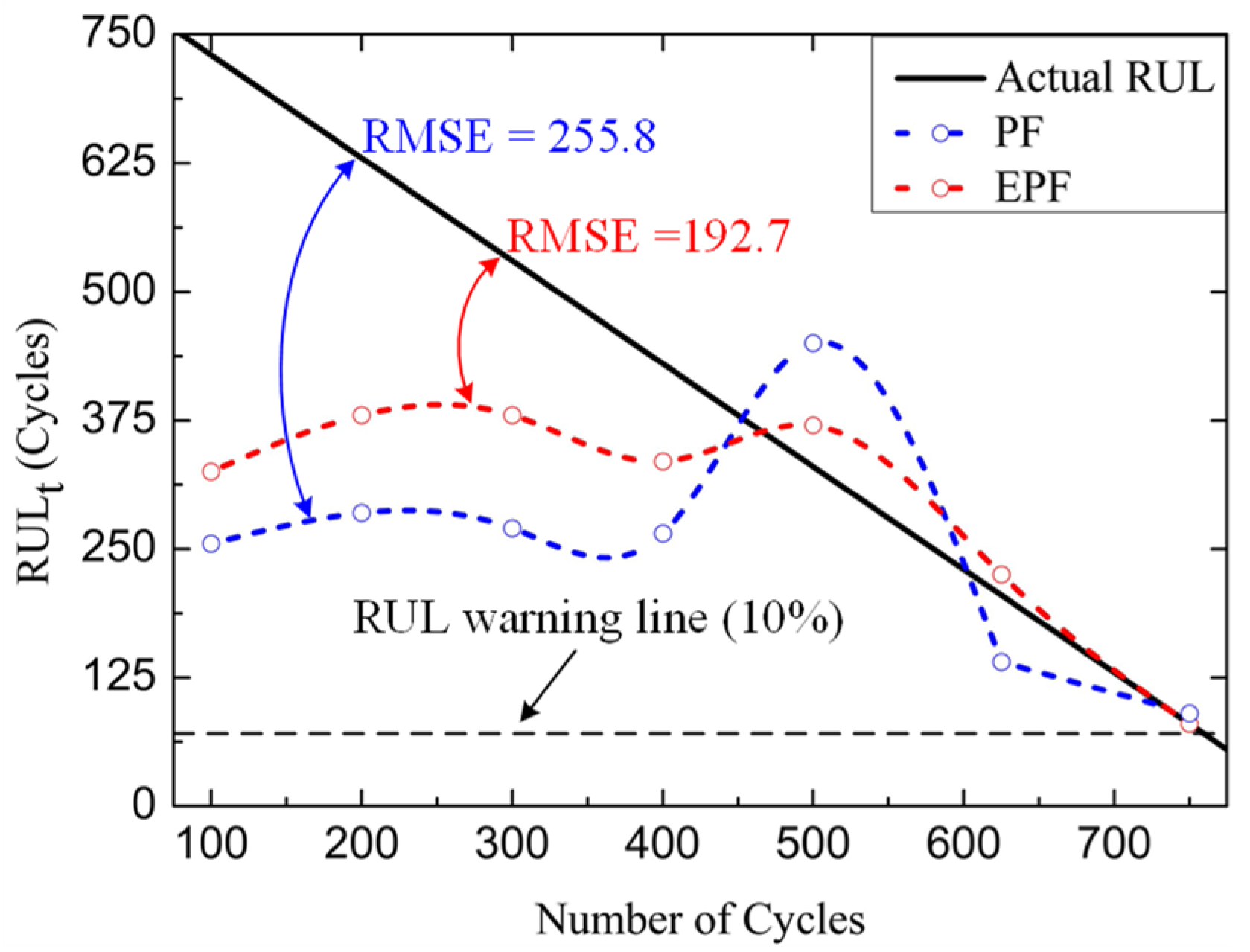
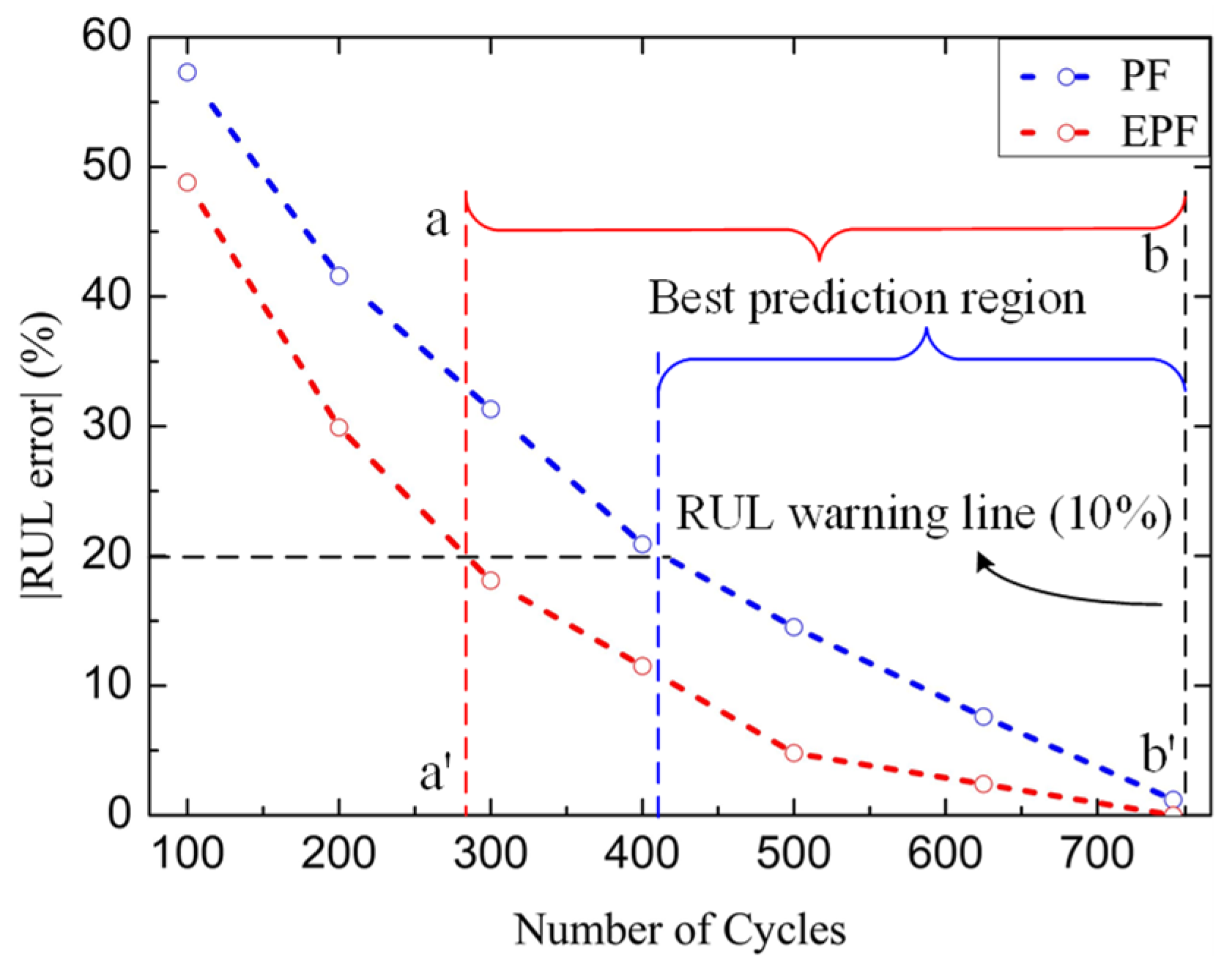
4.2. RUL Estimation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G. Advances in Electrical Machine, Power Electronic, and Drive Condition Monitoring and Fault Detection: State of the Art. IEEE Trans. Ind. Electron. 2015, 62, 1746–1759. [Google Scholar] [CrossRef]
- Khaligh, A. Realization of Parasitics in Stability of DC–DC Converters Loaded by Constant Power Loads in Advanced Multiconverter Automotive Systems. IEEE Trans. Ind. Electron. 2008, 55, 2295–2305. [Google Scholar] [CrossRef]
- Emadi, A.; Williamson, S.S.; Khaligh, A. Power electronics intensive solutions for advanced electric, hybrid electric, and fuel cell vehicular power systems. IEEE Trans. Power Electron. 2006, 21, 567–577. [Google Scholar] [CrossRef]
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An Industry-Based Survey of Reliability in Power Electronic Converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Zhang, Z.; Fu, G.; Wan, B.; Jiang, M.; Li, Y. A High-Efficiency IGBT Health Status Assessment Method Based on Data Driven. IEEE Trans. Electron. Devices 2021, 68, 168–174. [Google Scholar] [CrossRef]
- Oh, H.; Han, B.; McCluskey, P.; Han, C.; Youn, B.D. Physics-of-Failure, Condition Monitoring, and Prognostics of Insulated Gate Bipolar Transistor Modules: A Review. IEEE Trans. Power Electron. 2015, 30, 2413–2426. [Google Scholar] [CrossRef]
- Yang, S.; Xiang, D.; Bryant, A.; Mawby, P.; Ran, L.; Tavner, P. Condition Monitoring for Device Reliability in Power Electronic Converters: A Review. IEEE Trans. Power Electron. 2010, 25, 2734–2752. [Google Scholar] [CrossRef]
- Fang, X.; Lin, S.; Huang, X.; Lin, F.; Yang, Z.; Igarashi, S. A review of data-driven prognostic for IGBT remaining useful life. Chin. J. Electr. Eng. 2018, 4, 73–79. [Google Scholar] [CrossRef]
- Meng, J.; Yue, M.; Diallo, D. A Degradation Empirical-Model-Free Battery End-of-Life Prediction Framework Based on Gaussian Process Regression and Kalman Filter. IEEE Trans. Transp. Electrif. 2022, 1–7. [Google Scholar] [CrossRef]
- Mo, B.; Yu, J.; Tang, D.; Liu, H.; Yu, J. A remaining useful life prediction approach for lithium-ion batteries using Kalman filter and an improved particle filter. In Proceedings of the 2016 IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Cui, L.; Wang, X.; Wang, H.; Ma, J. Research on Remaining Useful Life Prediction of Rolling Element Bearings Based on Time-Varying Kalman Filter. IEEE Trans. Instrum. Meas. 2020, 69, 2858–2867. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, S.; He, Y. An Integrated Method of the Future Capacity and RUL Prediction for Lithium-Ion Battery Pack. IEEE Trans. Veh. Technol. 2022, 71, 2601–2613. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, C.; Wang, Y. Lithium-ion battery capacity and remaining useful life prediction using board learning system and long short-term memory neural network. J. Energy Storage 2022, 52, 104901. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, S.; Yang, Z.; Chen, Y. A reliable data-driven state-of-health estimation model for lithium-ion batteries in electric vehicles. Front. Energy Res. 2022, 10, 1013800. [Google Scholar] [CrossRef]
- Dusmez, S.; Heydarzadeh, M.; Nourani, M.; Akin, B. Remaining Useful Lifetime Estimation for Power MOSFETs Under Thermal Stress with RANSAC Outlier Removal. IEEE Trans. Ind. Inform. 2017, 13, 1271–1279. [Google Scholar] [CrossRef]
- Ni, J.; Zhang, C.; Zhang, X.; Lei, T. Remaining Useful Life Prediction Method for MOSFET Based on Time Series Model. In Proceedings of the IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2021; pp. 1217–1221. [Google Scholar] [CrossRef]
- Heydarzadeh, M.; Dusmez, S.; Nourani, M.; Akin, B. Bayesian remaining useful lifetime prediction of thermally aged power MOSFETs. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 2718–2722. [Google Scholar] [CrossRef]
- Zheng, Y.; Wu, L.; Li, X.; Yin, C. A relevance vector machine-based approach for remaining useful life prediction of power MOSFETs. In Proceedings of the Prognostics and System Health Management Conference (PHM-2014 Hunan), Zhangjiajie, China, 24–27 August 2014; pp. 642–646. [Google Scholar] [CrossRef]
- Ni, Z.; Lyu, X.; Yadav, O.P.; Singh, B.N.; Zheng, S.; Cao, D. Overview of Real-Time Lifetime Prediction and Extension for SiC Power Converters. IEEE Trans. Power Electron. 2020, 35, 7765–7794. [Google Scholar] [CrossRef]
- Ceccarelli, L.; Kotecha, R.M.; Bahman, A.S.; Iannuzzo, F.; Mantooth, H.A. Mission-Profile-Based Lifetime Prediction for a SiC mosfet Power Module Using a Multi-Step Condition-Mapping Simulation Strategy. IEEE Trans. Power Electron. 2019, 34, 9698–9708. [Google Scholar] [CrossRef]
- Hu, B.; Gonzalez, J.O.; Ran, L.; Ren, H.; Zeng, Z.; Lai, W.; Gao, B.; Alatise, O.; Lu, H.; Bailey, C.; et al. Failure and Reliability Analysis of a SiC Power Module Based on Stress Comparison to a Si Device. IEEE Trans. Device Mater. Reliab. 2017, 17, 727–737. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, S.; Yang, F.; Ugur, E.; Akin, B.; Wang, H. A Composite Failure Precursor for Condition Monitoring and Remaining Useful Life Prediction of Discrete Power Devices. IEEE Trans. Ind. Inform. 2021, 17, 688–698. [Google Scholar] [CrossRef]
- Zhao, S.; Peng, Y.; Yang, F.; Ugur, E.; Akin, B.; Wang, H. Health State Estimation and Remaining Useful Life Prediction of Power Devices Subject to Noisy and Aperiodic Condition Monitoring. IEEE Trans. Instrum. Meas. 2021, 70, 3510416. [Google Scholar] [CrossRef]
- Huang, H.; Mawby, P.A. A Lifetime Estimation Technique for Voltage Source Inverters. IEEE Trans. Power Electron. 2013, 28, 4113–4119. [Google Scholar] [CrossRef]
- Baker, N.; Munk-Nielsen, S.; Bęczkowski, S. Test setup for long term reliability investigation of Silicon Carbide MOSFETs. In Proceedings of the 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–9. [Google Scholar] [CrossRef]
- GeneSiC Semiconductor G3R350MT12D SiC MOSFET Datasheet. Available online: https://www.genesicsemi.com/sic-mosfet/G3R350MT12D/G3R350MT12D.pdf (accessed on 17 August 2022).
- Lutz, J.; Schlangenotto, H.; Scheuermann, U.; Doncker, R.D. Semiconductor Power Devices: Physics, Characteristics, Reliability; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Remaining useful performance analysis of batteries. In Proceedings of the IEEE Conference on Prognostics and Health Management, Denver, CO, USA, 20–23 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Orchard, M.E.; Vachtsevanos, G.J. A particle-filtering approach for on-line fault diagnosis and failure prognosis. Trans. Inst. Meas. Control 2009, 31, 221–246. [Google Scholar] [CrossRef]
- Celaya, J.R.; Saxena, A.; Saha, S.; Vashchenko, V.; Goebel, K. Prognostics of power MOSFET. In Proceedings of the IEEE 23rd International Symposium on Power Semiconductor Devices and ICs, San Diego, CA, USA, 23–26 May 2011; pp. 160–163. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Si | 4H-SiC |
|---|---|---|
| Forbidden band width (eV, 300 K) | 1.1 | 3.3 |
| Critical electric field (MV/cm) | 0.3 | 2.8 |
| Electron mobility (cm2·V−1·s−1) | 1400 | 900 |
| Hole mobility (cm2·V−1·s−1) | 500 | 100 |
| Thermal conductivity (W·cm−1·K−1) | 1.5 | 4.9 |
| Power load resistor, R | 5 Ω |
| Power supply, DC | 40 V |
| Minimum case temperature, Tmin | 30 °C |
| Maximum case temperature, Tmax | 190 °C |
| Average case temperature, Tm | 110 °C |
| Gate voltage, VGS | 15 V |
| ΔVth | ΔVds,on | ΔtGP | |||
|---|---|---|---|---|---|
| mV | % | mV | % | ns | % |
| 0.37 | 16.8 | 0.86 | 35.2 | 90 | 24 |
| Prediction Method | EPF | PF | Stochastic Degradation Model [22] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Failure Precursor | Vds,on | Ciss, Coss, Cres, Vsd, Vgs,th, Rds,on | |||||||
| Amounts of input data | 40% | 55% | 70% | 40% | 55% | 70% | 40% | 55% | 70% |
| Computation time (ms) | 39 | 51 | 68 | 31 | 26 | 33 | - | - | - |
| Prediction error | 11.5% | 4.2% | 1.2% | 20.9% | 12.8% | 4.4% | 15.0% | 5.52% | 22.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Gu, Y.; Yu, M.; Gao, C.; Chen, Y. Remaining Useful Lifetime Prediction Based on Extended Kalman Particle Filter for Power SiC MOSFETs. Micromachines 2023, 14, 836. https://doi.org/10.3390/mi14040836
Wu W, Gu Y, Yu M, Gao C, Chen Y. Remaining Useful Lifetime Prediction Based on Extended Kalman Particle Filter for Power SiC MOSFETs. Micromachines. 2023; 14(4):836. https://doi.org/10.3390/mi14040836
Chicago/Turabian StyleWu, Wei, Yongqian Gu, Mingkang Yu, Chongbing Gao, and Yong Chen. 2023. "Remaining Useful Lifetime Prediction Based on Extended Kalman Particle Filter for Power SiC MOSFETs" Micromachines 14, no. 4: 836. https://doi.org/10.3390/mi14040836