

Development of an Optoelectronic Integrated Sensor for a MEMS Mirror-Based Active Structured Light System
 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Active Structured Light System and its Key Components
2.1. The Structured Light System Design
2.2. The MEMS Micromirror
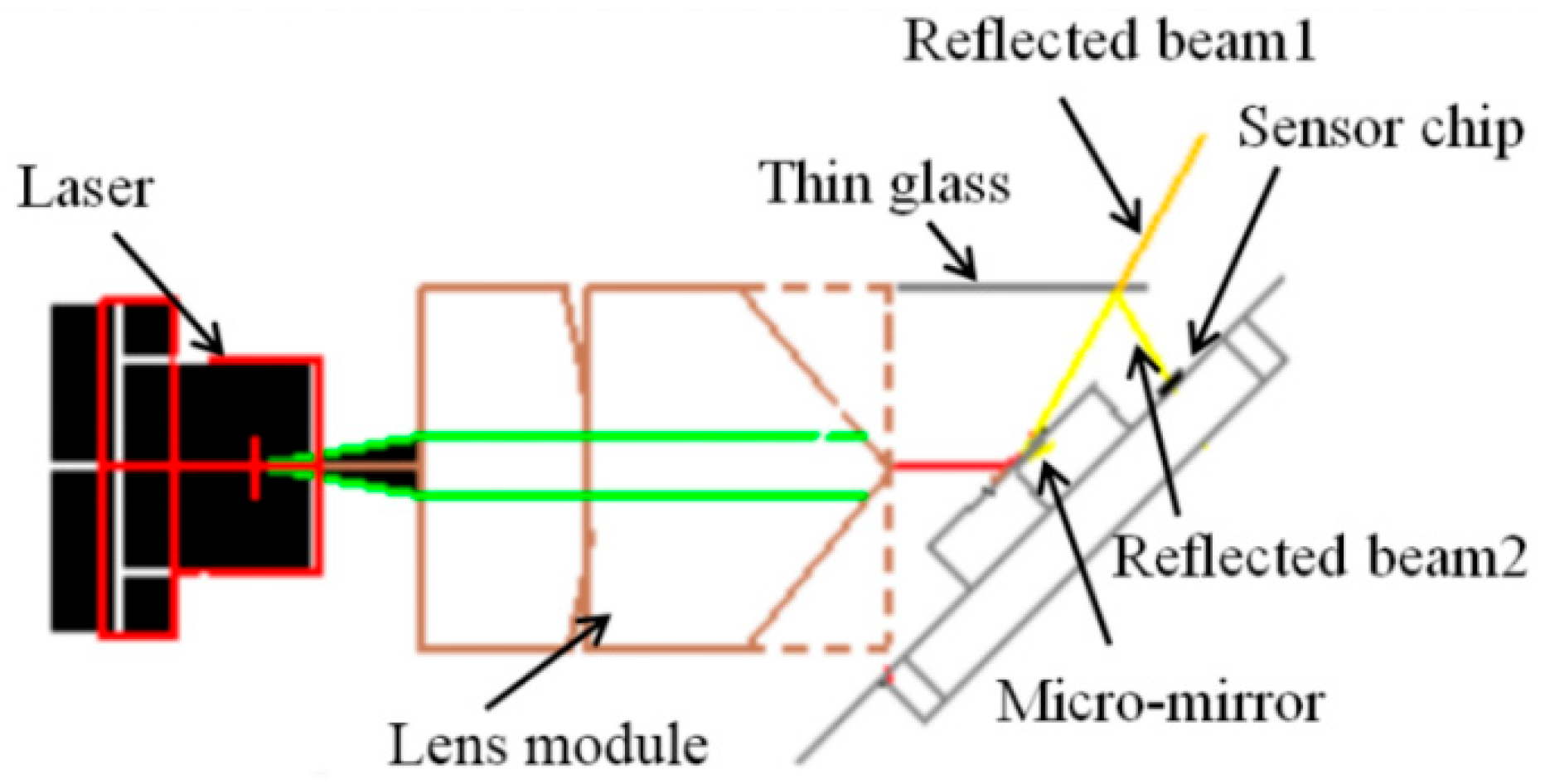
2.3. The Optoelectronic Integrated Sensor
2.4. The Control System and the Elimination of Phase Error
3. Design of a Large-Area Photodetector in Sensor Chip
4. Realization of the Receiving Circuit in Sensor Chip
4.1. Overall Design of the Receiving Circuit
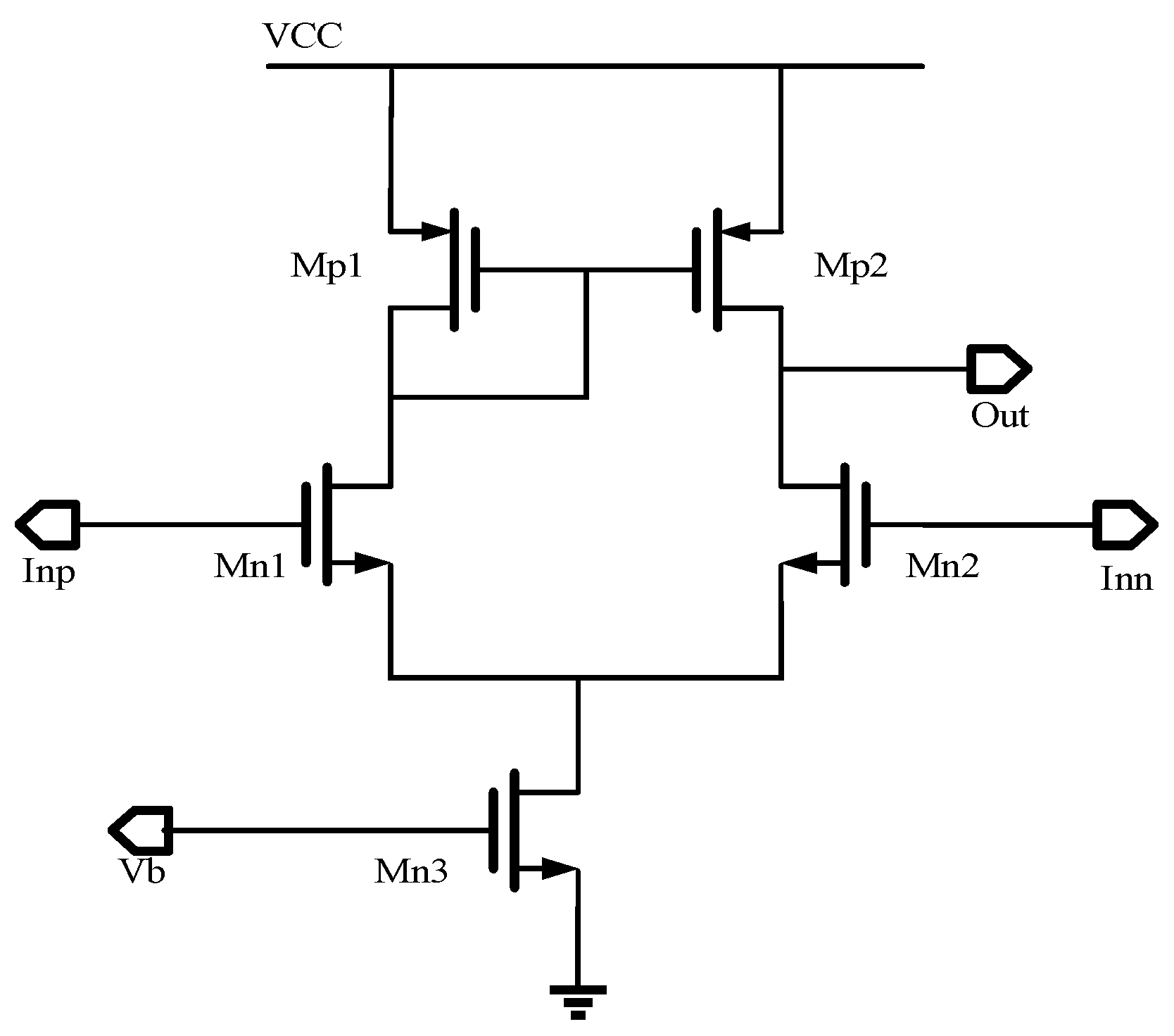
4.2. Design and Improvement of the Post Amplifier
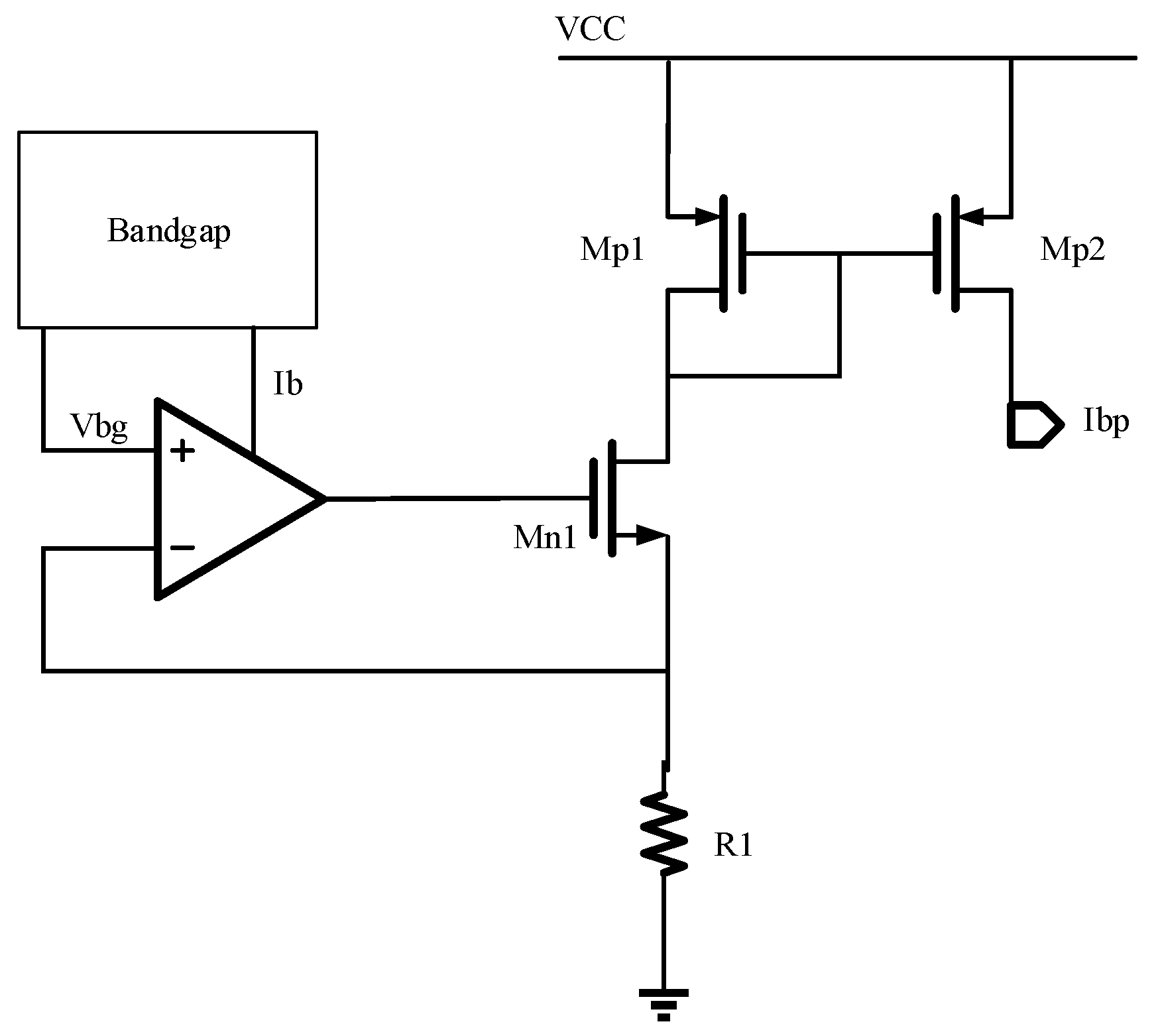
4.3. Reference Current Circuit
4.4. Improvement of the Output Offset
5. Results and Discussion
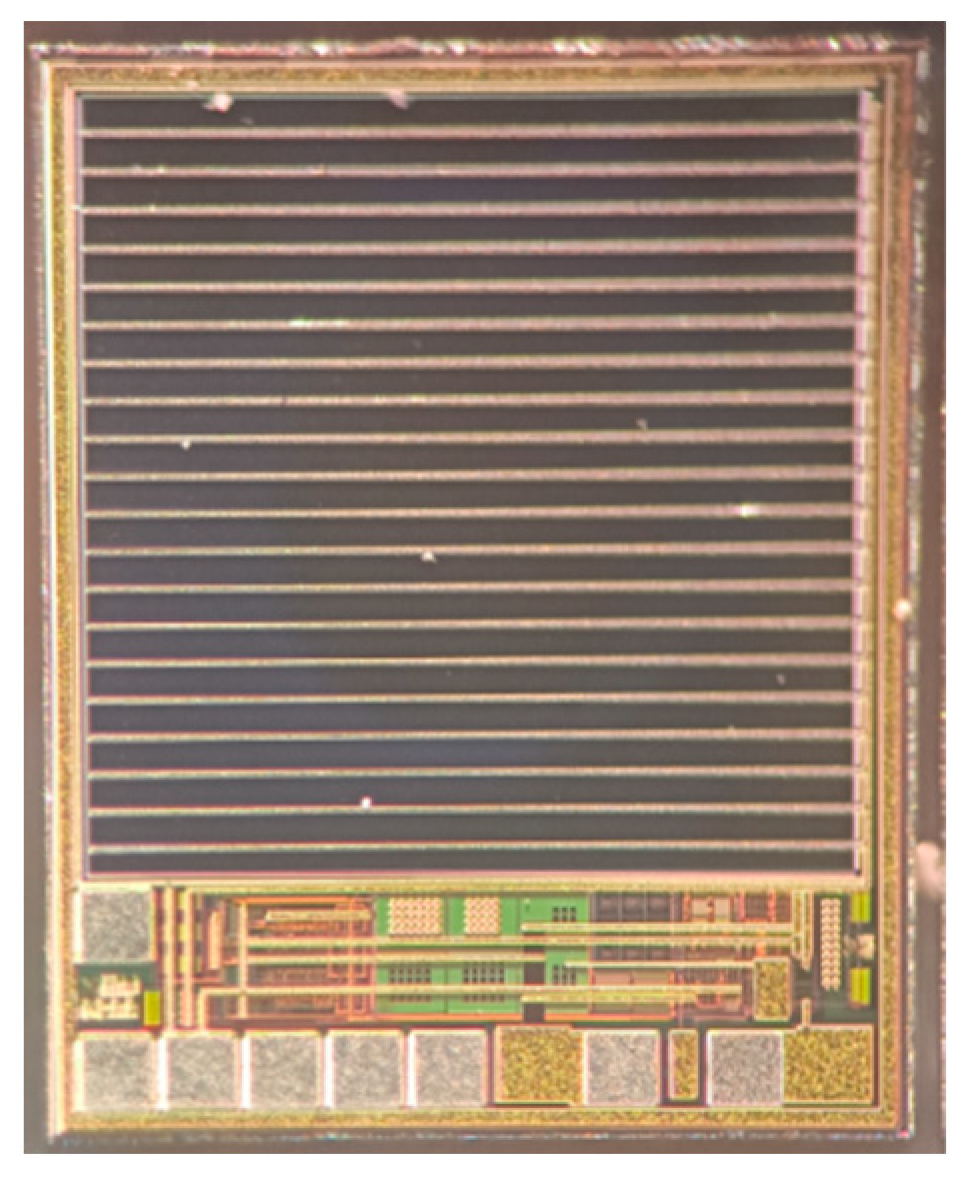
5.1. Experimental Platform of the Chip
5.2. Experimental Platform of the System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Luo, B.; Su, X.; Li, L.; Li, B.; Zhang, S.; Wang, Y. A convenient 3D reconstruction model based on parallel-axis structured light system. Opt. Lasers Eng. 2021, 138, 106366. [Google Scholar] [CrossRef]
- Marrugo, A.G.; Gao, F.; Zhang, S. State-of-the-art active optical techniques for three-dimensional surface metrology: A review. J. Opt. Soc. Am. A 2020, 37, B60–B77. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S. High-speed 3d shape measurement with structured light methods: A review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Wang, Y.; Hyun, J.S.; Zhang, S.; Luo, B.; Liu, Z.; Jiang, C.; Tao, B. Multilevel symmetric pattern design and optimization for high-speed and high-accuracy 3d shape measurement. Opt. Laser Technol. 2020, 126, 106103. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, F.; Xue, T. Omnidirectional field of view structured light calibration method for catadioptric vision system. Measurement 2019, 148, 106914. [Google Scholar] [CrossRef]
- Chen, H.; Cui, W. A comparative analysis between active structured light and multi-view stereo vision technique for 3D reconstruction of face model surface. Optik 2020, 206, 164190. [Google Scholar] [CrossRef]
- Li, Z.H.; Lin, Y.T.; Lu, M.S.C. An Electromagnetically-Driven Piezoresistively Sensed CMOS MEMS Scanning Mirror for Projection Display. In Proceedings of the Eurosensors, Paris, France, 3–6 September 2017; p. 353. [Google Scholar]
- Drabe, C.; Kallweit, D.; Dreyhaupt, A.; Grahmann, J.; Schenk, H.; Davis, W. Bi-Resonant Scanning Mirror with Piezoresistive Positionsensor for WVGA Laser Projection Systems. In Proceedings of the SPIE, San Francisco, CA, USA, 24–25 January 2012; Volume 8252. [Google Scholar]
- Grahmann, J.; Dreyhaupt, A.; Drabe, C.; Schrödter, R.; Kamenz, J.; Sandner, T. MEMS-mirror based trajectory resolution and precision enabled by two different piezoresistive sensor technologies. In Proceedings of the SPIE, San Francisco, CA, USA, 15–17 February 2016; Volume 9760. [Google Scholar]
- Ju, S.; Jeong, H.; Park, J.H.; Bu, J.U.; Ji, C.H. Electromagnetic 2D scanning micromirror for high definition laser projection displays. IEEE Photon. Technol. Lett. 2018, 30, 2072–2075. [Google Scholar] [CrossRef]
- Tsai, C.C.; Li, Z.H.; Lin, Y.T.; Lu, M.S.C. A Closed-Loop Controlled CMOS MEMS Biaxial Scanning Mirror for Projection Displays. IEEE Sens. J. 2020, 20, 242–249. [Google Scholar] [CrossRef]
- Trusov, A.A.; Shkel, A.M. A novel capacitive detection scheme with inherent self-calibration. J. Microelectromech. Syst. 2007, 16, 1324–1333. [Google Scholar] [CrossRef]
- Cagdaser, B.; Jog, A.; Last, M.; Leibowitz, B.S.; Zhou, L.; Shelton, E.; Pister, K.S.J.; Boser, B.E. Capacitive Sense Feedback Control for MEMSbeam Steering Mirrors. In Proceedings of the Solid-State Sensor, Actuator and Microsystems Workshop, Hilton Head Island, SC, USA, 6–10 June 2004; pp. 348–351. [Google Scholar]
- Hung, A.C.L.; Lai, H.Y.H.; Lin, T.W.; Fu, S.G.; Lu, M.S.C. An electrostatically driven 2D micro-scanning mirror with capacitive sensing for projection display. Sens. Actuators A Phys. 2015, 222, 122–129. [Google Scholar] [CrossRef]
- Lin, H.; Lin, T.W.; Hung, A.C.L.; Lu, M.S.C. A Bi-Axial Capacitive Scanning Mirror with Closed-Loop Control. In Proceedings of the IEEE Micro Electro Mechanical Systems (MEMS), Belfast, Ireland, 21–25 January 2018; pp. 567–570. [Google Scholar]
- Wantocha, T.V.; Mallasa, C.; Hofmanna, U.; Janesa, J.; Bernhard, W. Analysis of Capacitive Sensing for 2D-MEMS Scanner Laser. In Proceedings of the SPIE Moems-Mems, San Francisco, CA, USA, 1–6 February 2014; p. 897707. [Google Scholar]
- Lee, M.; Li, H.; Birla, M.B.; Li, G.; Wang, T.D.; Oldham, K.R. Capacitive Sensing for 2D Electrostatic MEMS Scanner in a Clinical Endomicroscope. IEEE Sens. J. 2022, 22, 24493–24503. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q.; Huang, Y.; Ma, R. Phase Alignment of an Array Optical Telescope System Using Balanced Detection. Micromachines 2023, 14, 409. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Qin, Z.; Li, H. Online Compensation of Phase Delay Error Based on P-F Characteristic for MEMS Vibratory Gyroscopes. Micromachines 2022, 13, 647. [Google Scholar] [CrossRef] [PubMed]
- Morrison, J.; Imboden, M.; Bishop, D.J. Tuning the resonance frequencies and mode shapes in a large range multi-degree of freedom micromirror. Opt. Express 2017, 25, 7895–7906. [Google Scholar] [CrossRef] [PubMed]
- Loewke, N.O.; Qiu, Z.; Mandella, M.J.; Ertsey, R.; Loewke, A.; Gunaydin, L.A.; Rosenthal, E.L.; Contag, C.H.; Solgaard, O. Software-based phase control, video-rate imaging, and real-time mosaicing with a Lissajous-scanned confocal microscope. IEEE Trans. Med. Imag. 2020, 39, 1127–1137. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Feng, Y.; Sun, X.; Zhu, L.; Cheng, X.; Chen, Q.; Liu, Y.; Xie, H. Integrated tilt angle sensing for large displacement scanning MEMS mirrors. Opt. Express 2018, 26, 25736–25749. [Google Scholar] [CrossRef] [PubMed]
- Qu, J.; Gao, H.; Zhang, R.; Cao, Y.; Zhou, W.; Xie, H. High-flexibility and high-accuracy phase delay calibration method for MEMS-based fringe projection systems. Opt. Express 2023, 2, 1049–1066. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Wang, P.; Li, J.; Xie, H. Temperature Stability Study of Resonant Angular Scanning Micromirrors with Electrostatic Comb-drive Actuators. Sens. Actuators A Phys. 2021, 318, 112525. [Google Scholar] [CrossRef]
- Fan, C.C.; Cheng, X.; Yan, H.P.; Shi, X.; Zheng, M.; Xu, P.; Chen, C. Realization of a High Responsivity Fully-integrated chip with Optimized Large-area Photodetector. Acta Photon Sin. 2015, 44, 76–81. [Google Scholar]
- Cheng, X.; Sun, X.; Liu, Y.; Zhu, L.; Zhang, X.; Zhou, L.; Xie, H. Integrated Optoelectronic Position Sensor for Scanning Micromirrors. Sensors 2018, 18, 982. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Razavi, B. Design of Analog CMOS Integrated Circuits; McGraw-Hill: New York, NY, USA, 2003; p. 127. [Google Scholar]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Xu, S.; Liu, Y.; Cao, Y.; Xie, H.; Ye, J. Development of an Optoelectronic Integrated Sensor for a MEMS Mirror-Based Active Structured Light System. Micromachines 2023, 14, 561. https://doi.org/10.3390/mi14030561
Cheng X, Xu S, Liu Y, Cao Y, Xie H, Ye J. Development of an Optoelectronic Integrated Sensor for a MEMS Mirror-Based Active Structured Light System. Micromachines. 2023; 14(3):561. https://doi.org/10.3390/mi14030561
Chicago/Turabian StyleCheng, Xiang, Shun Xu, Yan Liu, Yingchao Cao, Huikai Xie, and Jinhui Ye. 2023. "Development of an Optoelectronic Integrated Sensor for a MEMS Mirror-Based Active Structured Light System" Micromachines 14, no. 3: 561. https://doi.org/10.3390/mi14030561