



Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation


Abstract
:1. Introduction
2. Related Work
2.1. Trajectory Optimization and Constrained Direct Collocation
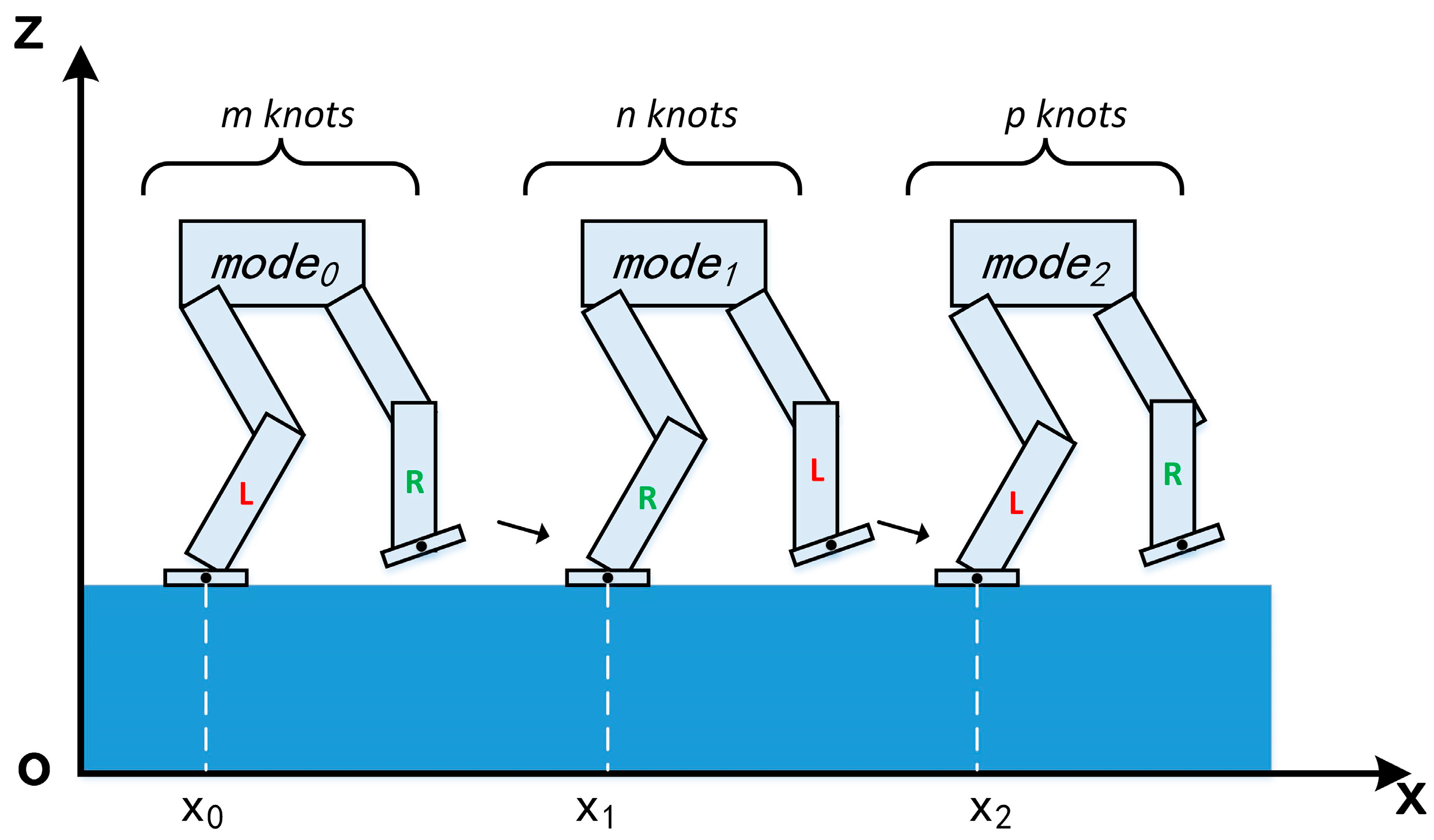
2.2. Virtual Knots and Multi-Phases Gait Planning
3. Symmetrical Efficient Gait Planning
3.1. Symmetry Characteristic and Constraints for Three Phases Planning
3.2. DIRCON-Based Symmetrical Efficient Gait Planner
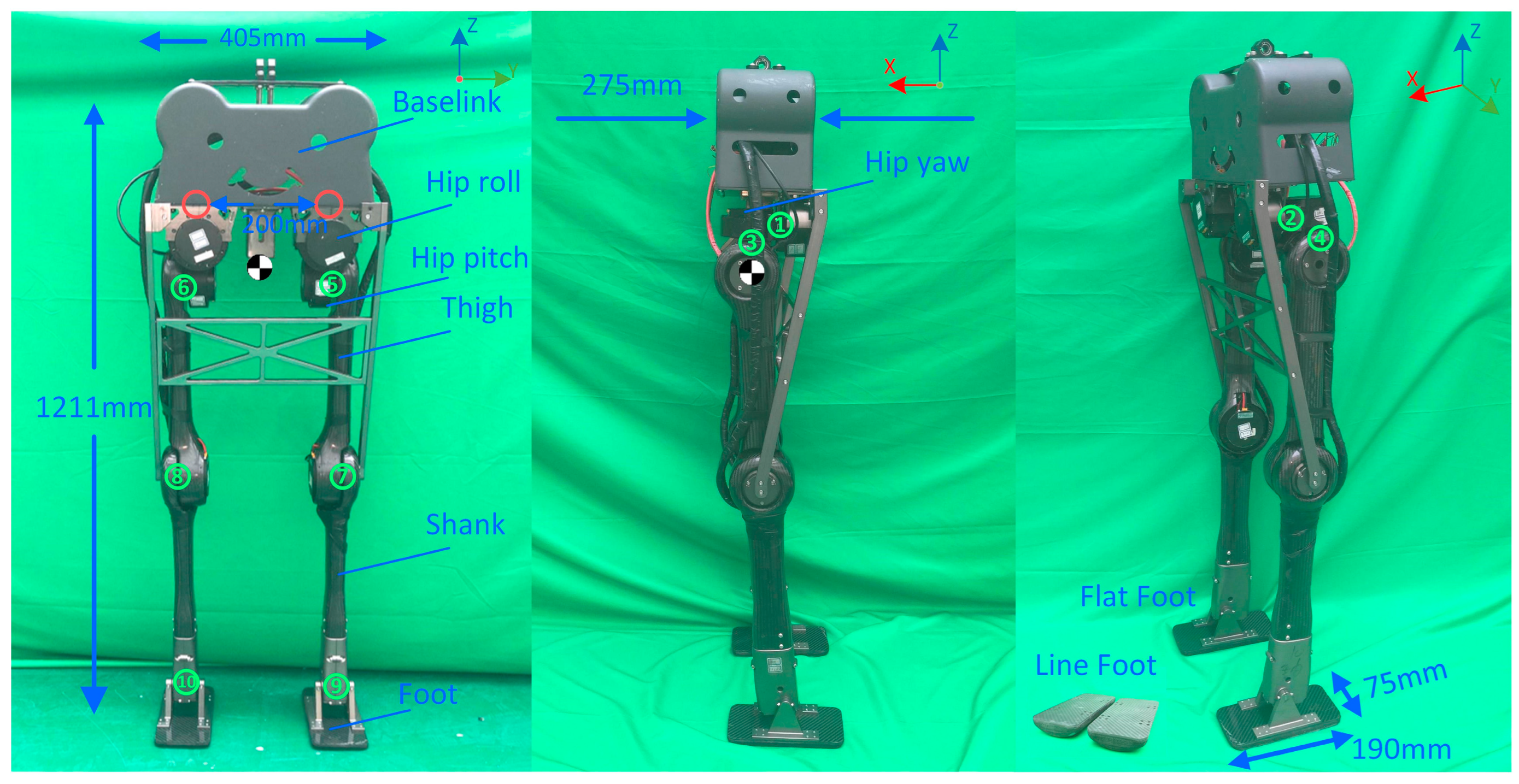
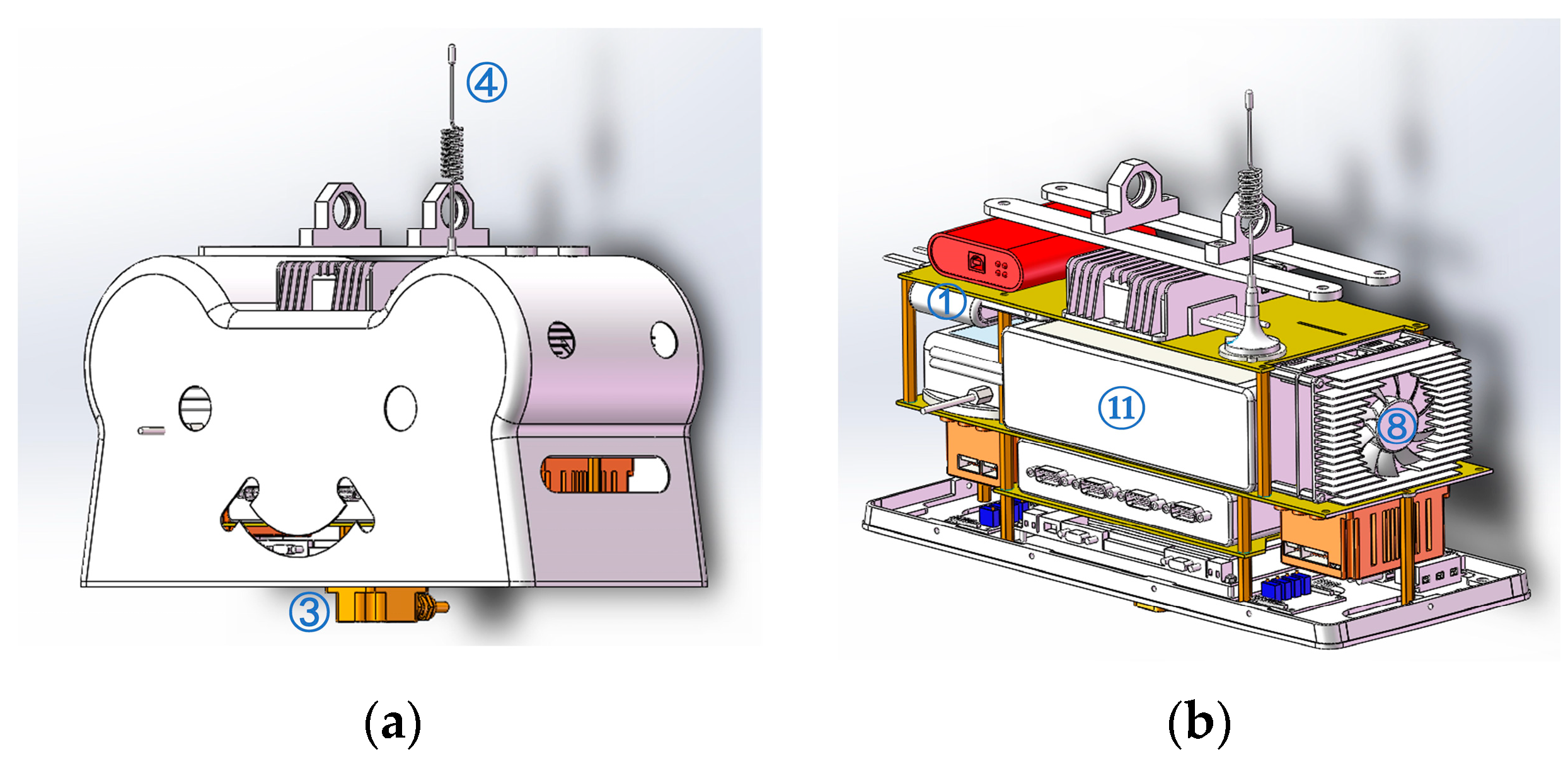
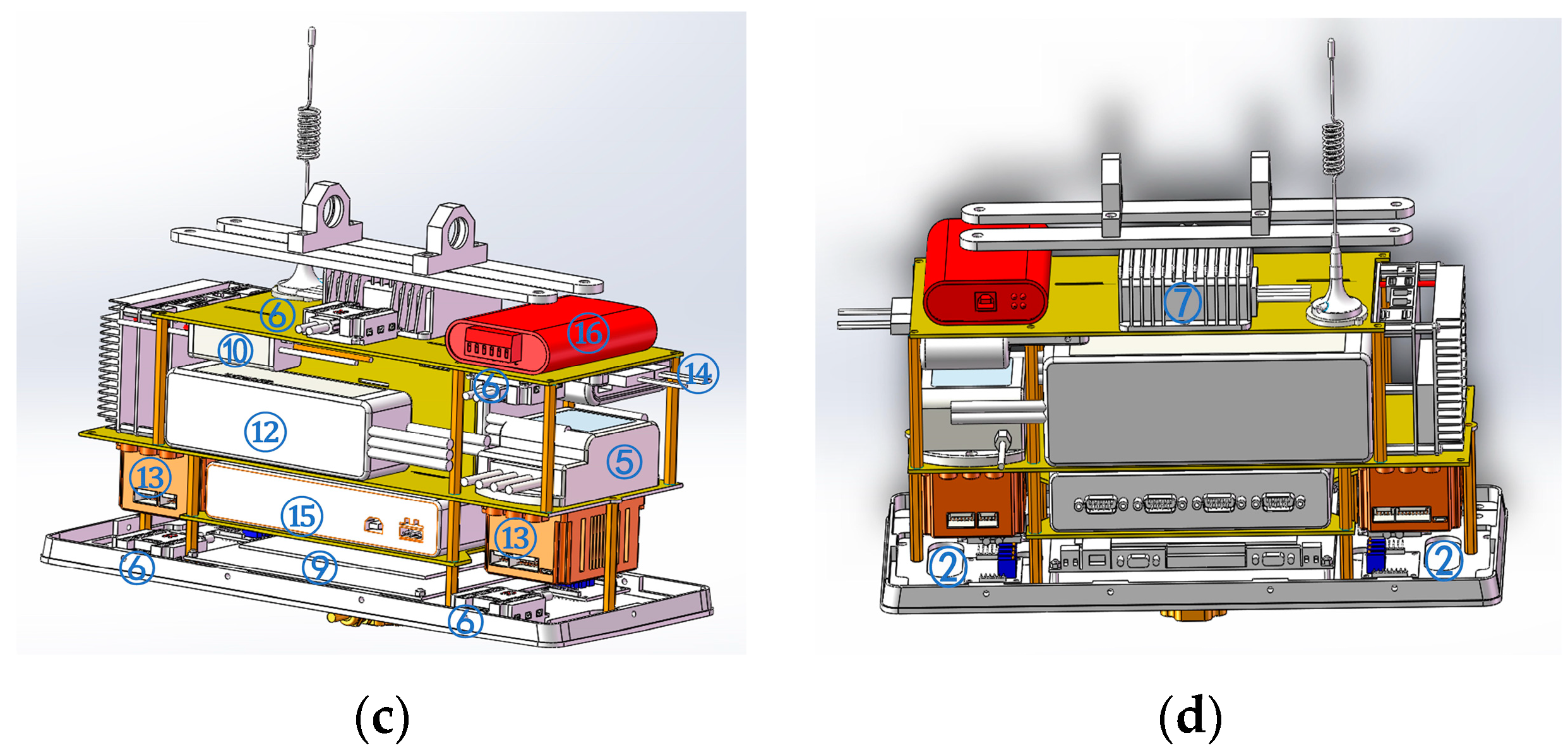
4. Robot Device Design and Implementation
5. Experiments
5.1. Implementation Details of Simulation and Physical Experiments
5.2. Dynamic Simulation
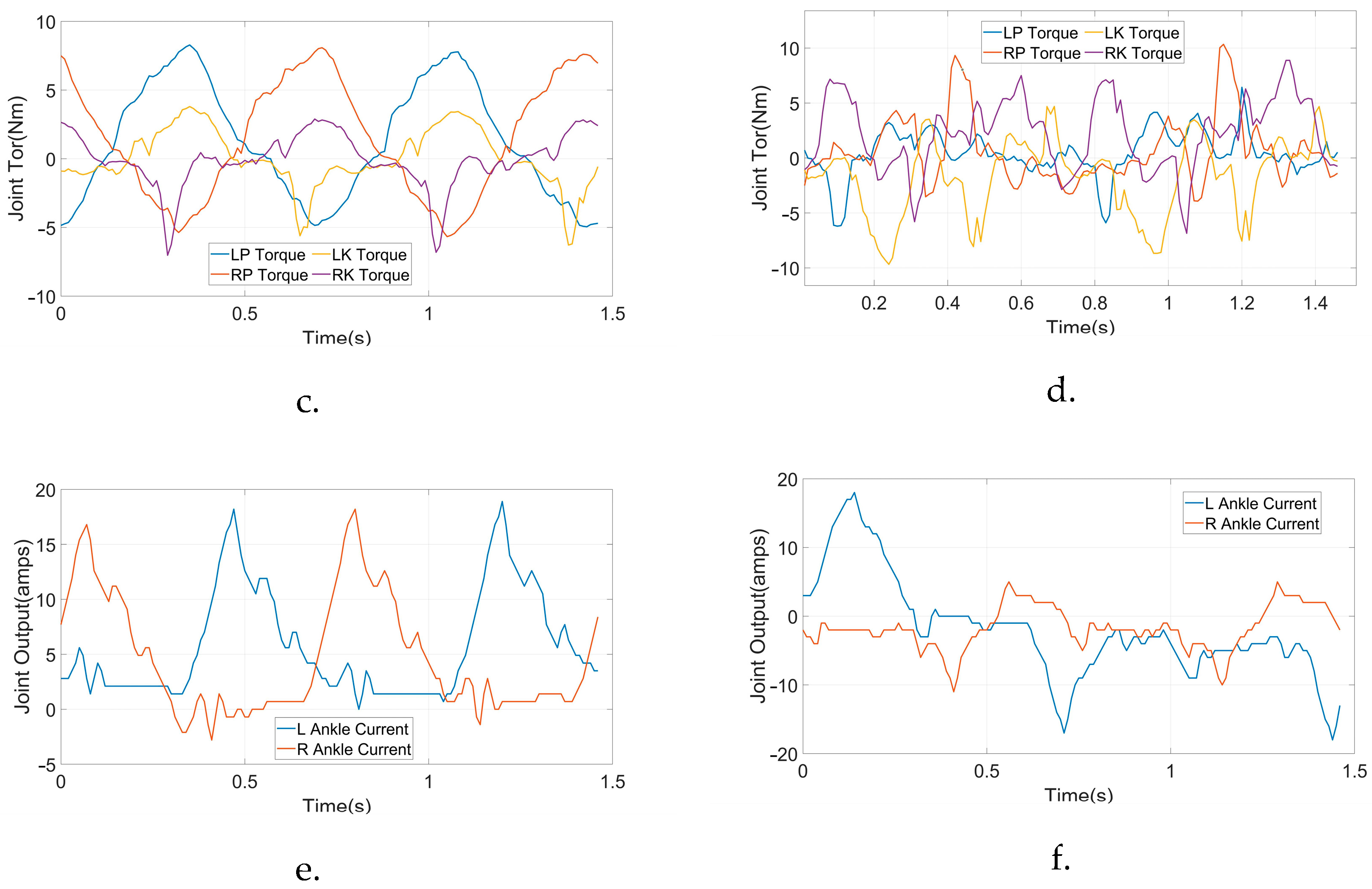
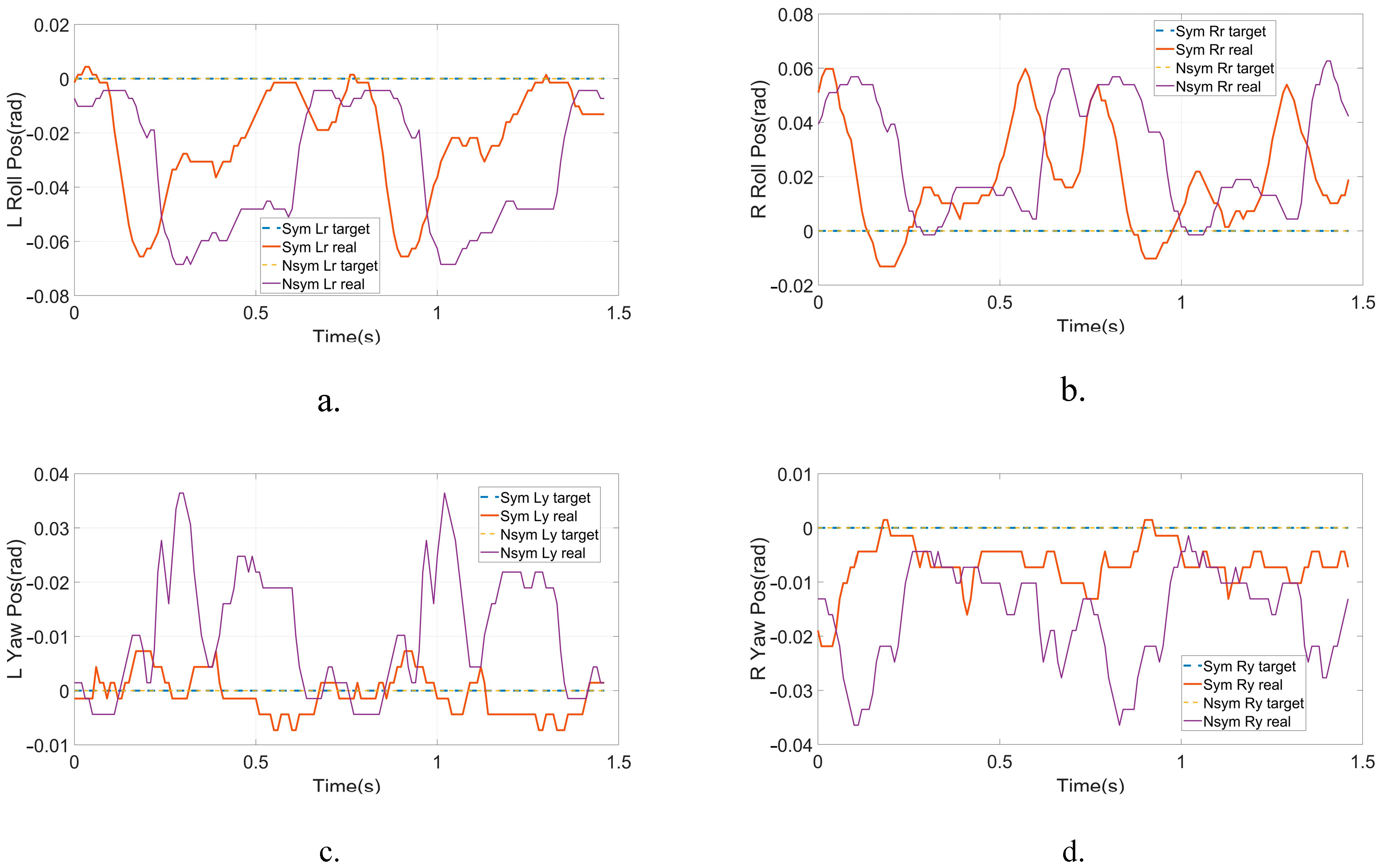
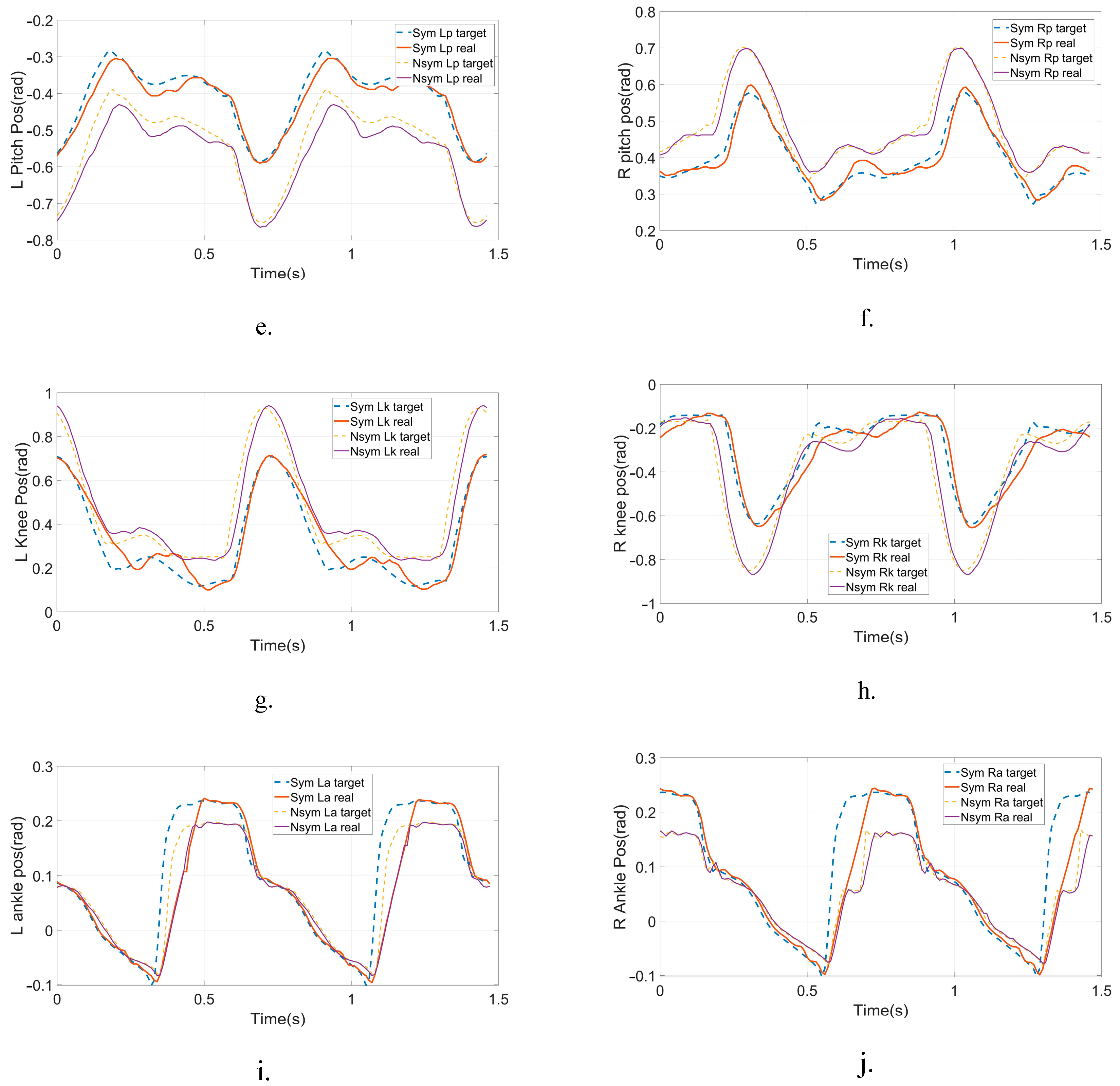
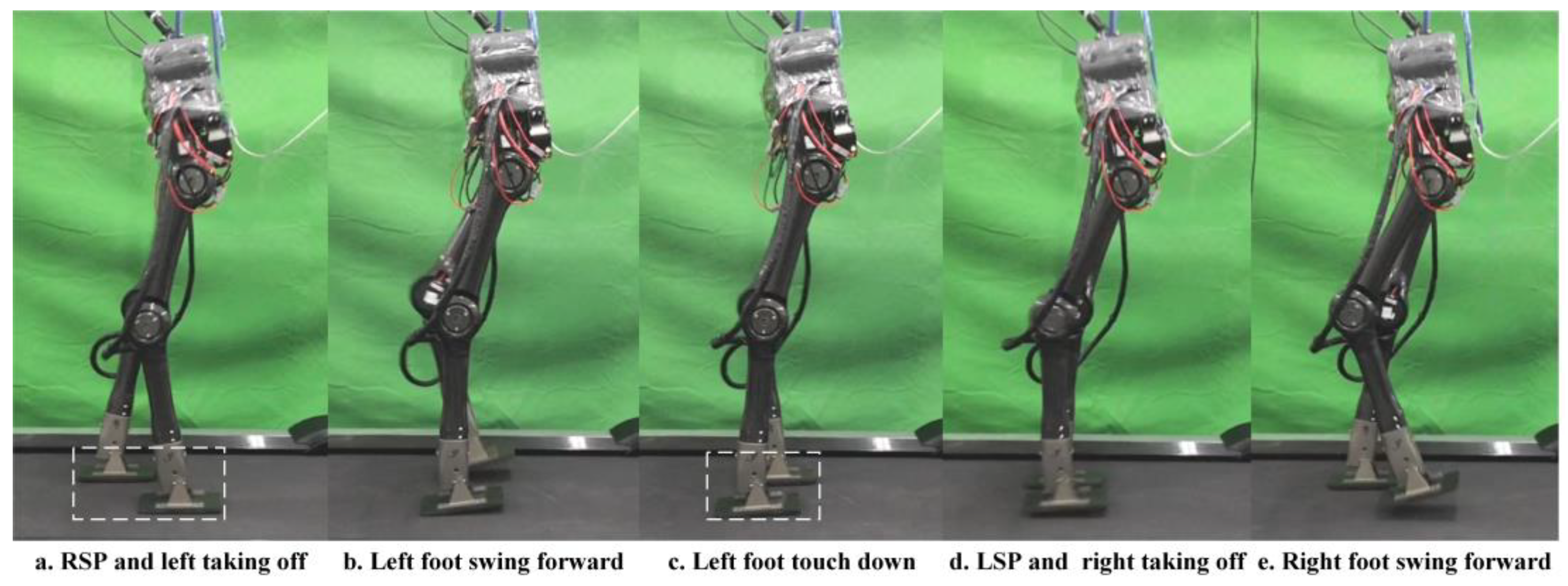
5.3. Physical Comparison Walking Experiments
5.4. Analysis
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Yuan, Z.; Dong, S.; Sadiq, M.T.; Zhang, F.; Li, J. Structural design and kinematics simulation of hydraulic biped robot. Appl. Sci. 2020, 10, 6377. [Google Scholar] [CrossRef]
- Gupta, S.; Kumar, A. A brief review of dynamics and control of underactuated biped robots. Adv. Robot. 2017, 31, 607–623. [Google Scholar] [CrossRef]
- Morisawa, M.; Kajita, S.; Kanehiro, F.; Kaneko, K.; Miura, K.; Yokoi, K. Balance control based on capture point error compensation for biped walking on uneven terrain. In Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November 2012; pp. 734–740. [Google Scholar]
- Alexander, R.M. The gaits of bipedal and quadrupedal animals. Int. J. Robot. Res. 1984, 3, 49–59. [Google Scholar] [CrossRef]
- Srinivasan, M. Fifteen observations on the structure of energy-minimizing gaits in many simple biped models. J. R. Soc. Interface 2011, 8, 74–98. [Google Scholar] [CrossRef] [PubMed]
- Antonellis, P.; Mohammadzadeh Gonabadi, A.; Myers, S.A.; Pipinos, I.I.; Malcolm, P. Metabolically efficient walking assistance using optimized timed forces at the waist. Sci. Robot. 2022, 7, eabh1925. [Google Scholar] [CrossRef] [PubMed]
- Mikolajczyk, T.; Mikołajewska, E.; Al-Shuka, H.F.N.; Malinowski, T.; Kłodowski, A.; Pimenov, D.Y.; Paczkowski, T.; Hu, F.; Giasin, K.; Mikołajewski, D.; et al. Recent Advances in Bipedal Walking Robots: Review of Gait, Drive, Sensors and Control Systems. Sensors 2022, 22, 4440. [Google Scholar] [CrossRef] [PubMed]
- Gan, Z.; Yesilevskiy, Y.; Zaytsev, P.; Remy, C.D. All common bipedal gaits emerge from a single passive model. J. R. Soc. Interface 2018, 15, 20180455. [Google Scholar] [CrossRef] [PubMed]
- Pinto, C.M.; Santos, A.P. Modelling gait transition in two-legged animals. Commun. Nonlinear Sci. 2011, 16, 4625–4631. [Google Scholar]
- Shin, H.K.; Kim, B.K. Energy-efficient gait planning and control for biped robots utilizing the allowable ZMP region. IEEE Trans. Robot. 2014, 30, 986–993. [Google Scholar] [CrossRef]
- Li, L.; Xie, Z.; Luo, X.; Li, J. Trajectory Planning of Flexible Walking for Biped Robots Using Linear Inverted Pendulum Model and Linear Pendulum Model. Sensors 2021, 21, 1082. [Google Scholar] [CrossRef] [PubMed]
- Ye, L.; Wang, X.; Liu, H.; Liang, B. Symmetry in Biped Walking. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021; pp. 113–118. [Google Scholar]
- Kumar, J.; Ashish, D. Using bilateral symmetry of the biped robot mechanism for efficient and faster optimal gait learning on uneven terrain. Int. J. Intell. Robot. Appl. 2021, 5, 429–464. [Google Scholar] [CrossRef]
- Ding, J.; Zhou, C.; Xiao, X. Energy-Efficient Bipedal Gait Pattern Generation via CoM Acceleration Optimization. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing China, 6–9 November 2018; pp. 238–244. [Google Scholar] [CrossRef]
- Yu, W.; Turk, G.; Liu, C.K. Karen L. Learning symmetric and low-energy locomotion. ACM Trans. Graph. 2018, 37, 144. [Google Scholar] [CrossRef]
- Liu, Y. Multiphase Trajectory Generation for Planar Biped Robot Using Direct Collocation Method. Math. Probl. Eng. 2021, 2021, 6695528. [Google Scholar] [CrossRef]
- Winkler, A.W.; Bellicoso, C.D.; Hutter, M.; Buchli, J. Gait and trajectory optimization for legged systems through phase-based end-effector parameterization. IEEE Robot. Autom. Lett. 2018, 3, 1560–1567. [Google Scholar] [CrossRef]
- Chen, B.; Zang, X.; Zhang, Y.; Gao, L.; Zhu, Y.; Zhao, J. A Non-Flat Terrain Biped Gait Planner Based on DIRCON. Biomimetics 2022, 7, 203. [Google Scholar] [CrossRef] [PubMed]
- Ding, J.; Xiao, X. Two-stage optimization for energy-efficient bipedal walking. J. Mech. Sci. Technol. 2020, 34, 3833–3844. [Google Scholar] [CrossRef]
- Felis, M.L.; Mombaur, K. Synthesis of full-body 3-d human gait using optimal control methods. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Posa, M.; Kuindersma, S.; Tedrake, R. Optimization and stabilization of trajectories for constrained dynamical systems. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1366–1373. [Google Scholar]
- Hereid, A.; Hubicki, C.M.; Cousineau, E.A.; Hurst, J.W.; Ames, A.D. Hybrid zero dynamics based multiple shooting optimization with applications to robotic walking. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Wittmann, R.; Hildebrandt, A.-C.; Wahrmann, D.; Rixen, D.; Buschmann, T. Real-time nonlinear model predictive footstep optimization for biped robots. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015. [Google Scholar]
- Kelly, M. An introduction to trajectory optimization: How to do your own direct collocation. SIAM Rev. 2017, 59, 849–904. [Google Scholar] [CrossRef]
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Robot. 2017, 33, 1292–1312. [Google Scholar] [CrossRef]
- Gordon, C.C.; Blackwell, C.L.; Bradtmiller, B.; Parham, J.L.; Hotzman, J.; Paquette, S.P.; Corner, B.D.; Hodge, B.M. 2010 Anthropometric Survey of U.S. Marine Corps Personnel: Methods and Summary Statistics; Army Natick Soldier Research Development and Engineering Center: Natick, MA, USA, 2013. [Google Scholar]
- Katz, B.G. A Low Cost Modular Actuator for Dynamic Robots; Massachusetts Institute of Technology: Cambridge, MA, USA, 2018. [Google Scholar]
- Main Page of Drake. Available online: https://drake.mit.edu/ (accessed on 18 August 2021).
- Main Page of CoppeliaSim. Available online: https://www.coppeliarobotics.com/ (accessed on 21 July 2021).
- Kashiri, N.; Abate, A.; Abram, S.J.; Albu-Schaffer, A.; Clary, P.J.; Daley, M.; Faraji, S.; Furnemont, R.; Garabini, M.; Geyer, H.; et al. An overview on principles for energy efficient robot locomotion. Front. Robot. AI 2018, 5, 129. [Google Scholar] [CrossRef] [PubMed] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joints | Angle (deg) | Joints | Angle (deg) |
|---|---|---|---|
| Baselink-Hip roll | Fixed | Hip Pitch Joint(⑤,⑥) | |
| Hip Roll Joint(①,②) | Knee Joint(⑦,⑧) | ||
| Hip Yaw Joint(③,④) | Ankle Joint(⑨,⑩) |
| Components | Mass (kg) | Components | Mass (kg) |
|---|---|---|---|
| Baselink | 7.624 | Thigh | 1.116 |
| Hip roll | 0.922 | Shank | 1.597 |
| Hip yaw | 0.776 | Foot | 0.300 |
| Hip pitch | 0.743 | Total | 18.532 |
| Number | Device | Number | Device |
|---|---|---|---|
| 1 | USB-HUB | 9 | On-chip computer of contact sensor |
| 2 | The signal adapter of contact sensors | 10 | Voltage adapter of One-chip computer |
| 3 | IMU and Attitude sensor | 11 | Main battery |
| 4 | The antenna of remote power switch | 12 | Auxiliary power supply |
| 5 | Remote power switch | 13 | The driver of the ankle motor |
| 6 | Cubes of CAN network and power | 14 | SSD of the main controller |
| 7 | Voltage adapter of the main controller | 15 | USB-CAN-4EU |
| 8 | Main on-board controller | 16 | CAN Analyzer |
| Previous Flat Terrain Gait Planner | Proposed Symmetry Gait Planner | |
|---|---|---|
| Solving time | 120 s to 3 min (average 156 s) | 65 s to 5 min (average 138 s) |
| Morphology | Slightly stiff | More nature |
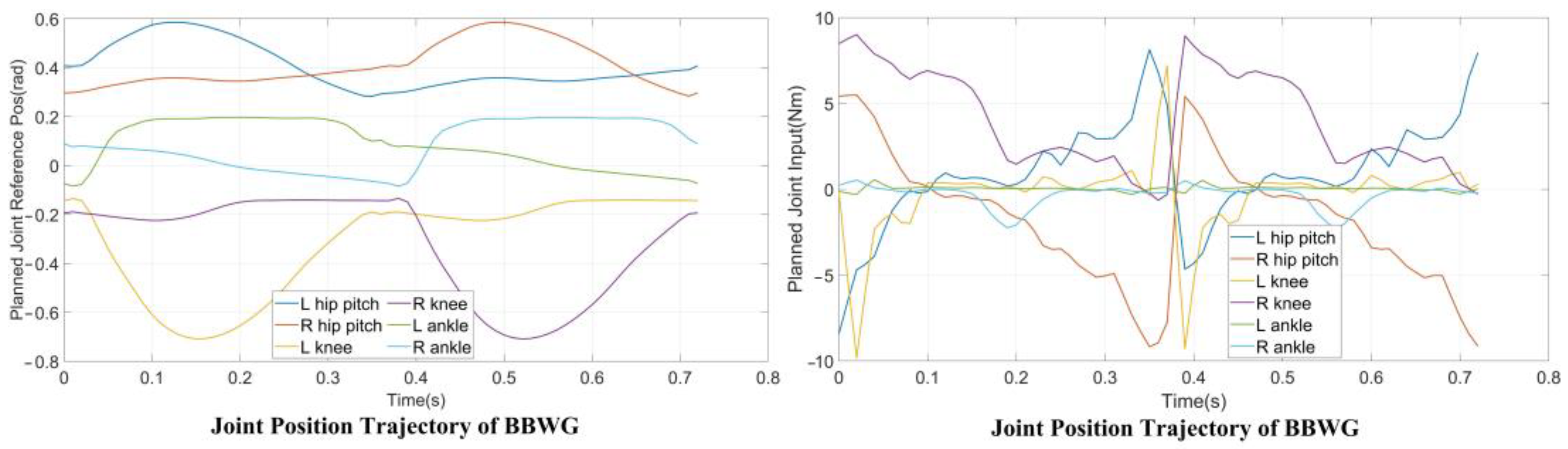
| Max joint input | 11.5 Nm | 9.8 Nm |
| Symmetry | No | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Zang, X.; Zhang, Y.; Gao, L.; Zhu, Y.; Zhao, J. Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation. Micromachines 2023, 14, 417. https://doi.org/10.3390/mi14020417
Chen B, Zang X, Zhang Y, Gao L, Zhu Y, Zhao J. Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation. Micromachines. 2023; 14(2):417. https://doi.org/10.3390/mi14020417
Chicago/Turabian StyleChen, Boyang, Xizhe Zang, Yue Zhang, Liang Gao, Yanhe Zhu, and Jie Zhao. 2023. "Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation" Micromachines 14, no. 2: 417. https://doi.org/10.3390/mi14020417