
Energy-Trapping Characteristics of Lateral Field Excited GdCOB Crystal Bulk Acoustic Wave Devices Based on Stepped Electrodes

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
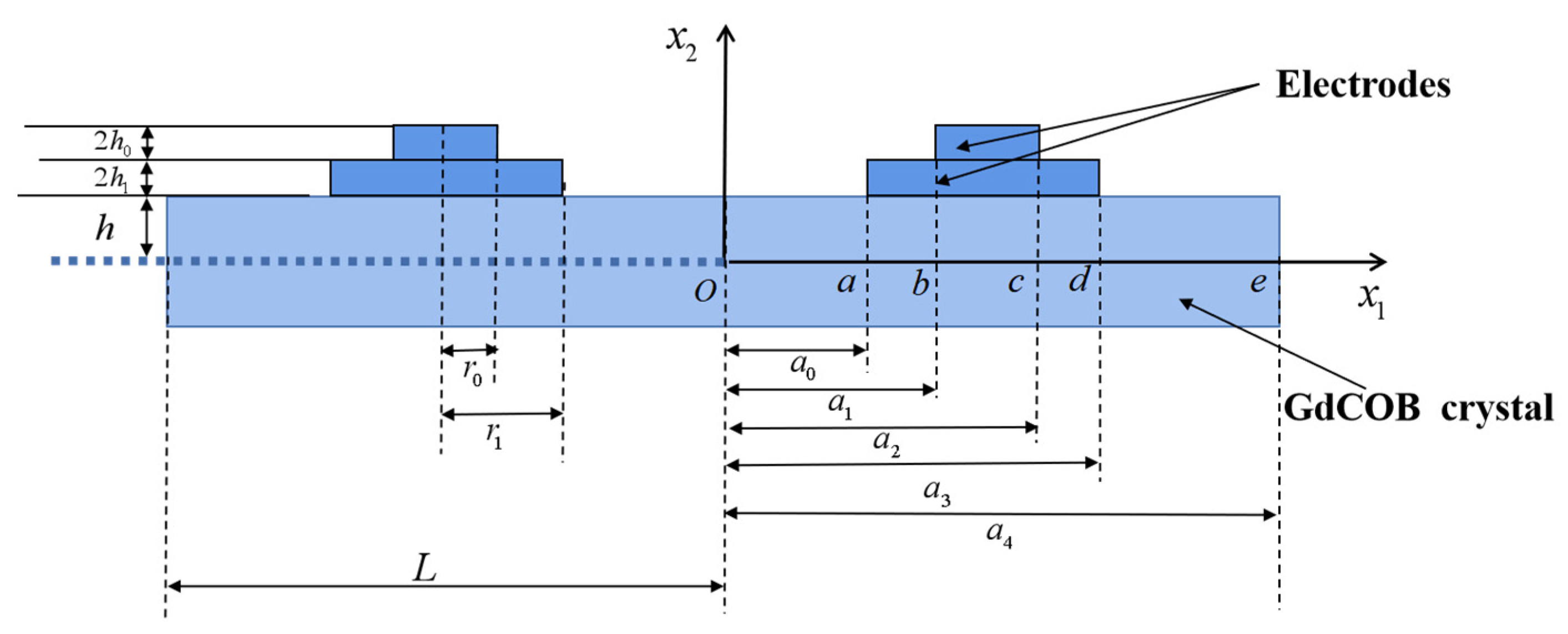
2. Governing Equation
3. Forced Vibrations of Finite Crystal Plates
3.1. Central Non-Electrode Area
3.2. Area Covered by a Single-Layer Electrode
3.3. Area Covered by the Double-Layer Electrodes
3.4. External Non-Electrode Area
3.5. Boundary and Continuity Conditions
4. Mode Coupling Analysis
5. The Influences of Stepped Electrodes on the Energy-Trapping Effect of GdCOB LFE Devices
5.1. Single-Step Electrodes
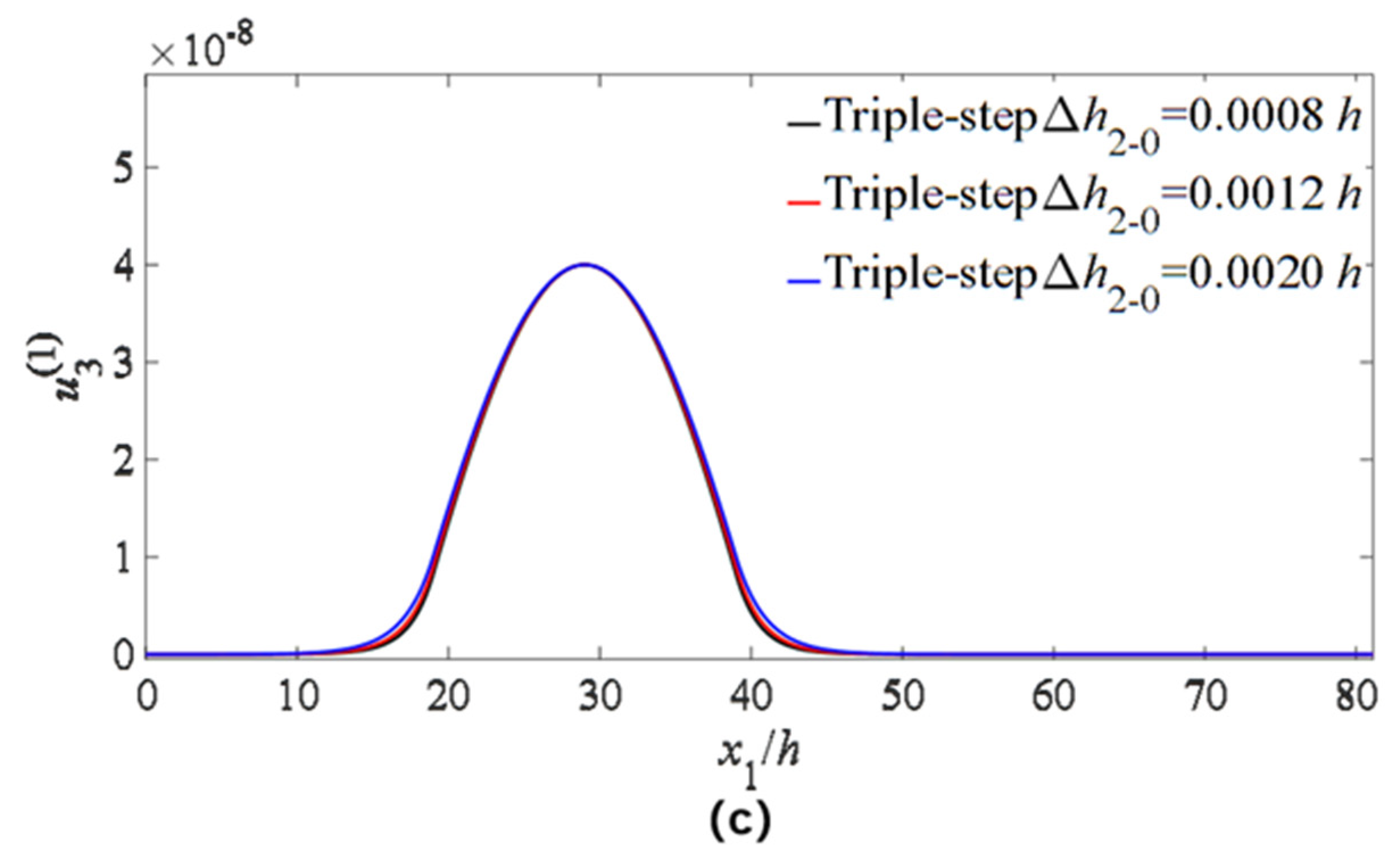
5.2. Triple-Step Electrodes
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Campbell, C. Surface acoustic wave devices and their signal processing applications. J. Acoust. Soc. Am. 1991, 89, 1479–1480. [Google Scholar] [CrossRef]
- Caliendo, C.; Verona, E.; D’Amico, A.; Furlani, A.; Iucci, G.; Russo, M.V. A new surface acoustic wave humidity sensor based on a polyethynylfluorenol membrane. Sens. Actuators B Chem. 1994, 18, 82–84. [Google Scholar] [CrossRef]
- Kim, D.I.; Jeong, R.H.; Lee, J.W.; Park, S.; Boo, J.-H. A highly sensitive quartz crystal microbalance sensor assisted with ZnO nanosheets for nerve agent detection. Funct. Mater. Lett. 2021, 14, 2151020. [Google Scholar] [CrossRef]
- Zhang, P.; Jia, H.; Yang, Y.; Wu, J.; Yang, J. Extended topological interface modes with tunable frequency in the piezoelectric phononic crystal. Appl. Phys. Lett. 2023, 122, 182201. [Google Scholar] [CrossRef]
- Chen, Y.; Lemaire-Semail, B.; Giraud, F.; Hayward, V. A piezoelectric based sensor system designed for in vivo skin biomechanical measurements. Sens. Actuators A Phys. 2023, 351, 114168. [Google Scholar] [CrossRef]
- Wang, L.-J.; Liu, J.-S.; He, S.-T. Humidity Sensing by Love Wave Detectors Coated with Different Polymeric Films. In Proceedings of the 2014 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, Beijing, China, 30 October–2 November 2014; pp. 44–47. [Google Scholar]
- Jakubik, W.P. Surface acoustic wave-based gas sensors. Thin Solid Film. 2011, 520, 986–993. [Google Scholar] [CrossRef]
- Luo, J.; Luo, P.; Xie, M.; Du, K.; Zhao, B.; Pan, F.; Fan, P.; Zeng, F.; Zhang, D.; Zheng, Z. A new type of glucose biosensor based on surface acoustic wave resonator using Mn-doped ZnO multilayer structure. Biosens. Bioelectron. 2013, 49, 512–518. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Yang, J.; Jiang, Q. Thickness-shear and thickness-twist vibrations of circular AT-cut quartz resonators. Acta Mech. Solida Sin. 2013, 26, 245–254. [Google Scholar] [CrossRef]
- Tiersten, H. Analysis of trapped-energy resonators operating in overtones of coupled thickness-shear and thickness-twist. J. Acoust. Soc. Am. 1976, 59, 879–888. [Google Scholar] [CrossRef]
- Tiersten, H.; Smythe, R. An analysis of contoured crystal resonators operating in overtones of coupled thickness shear and thickness twist. J. Acoust. Soc. Am. 1979, 65, 1455–1460. [Google Scholar] [CrossRef]
- Tiersten, H.; Smythe, R. Coupled thickness–shear and thickness–twist vibrations of unelectroded AT-cut quartz plates. J. Acoust. Soc. Am. 1985, 78, 1684–1689. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Yang, J. An Introduction to the Mathematical Theory of Vibrations of Elastic Plates; World Scientific: Singapore, 2006. [Google Scholar]
- Ma, T.; Zhang, C.; Wang, W.; Zhang, Z.; Feng, G. Optimal electrode shape and size of lateral-field-excited piezoelectric crystal resonators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 263–266. [Google Scholar] [PubMed]
- Smythe, R.; Tiersten, H. An approximate expression for the motional capacitance of a lateral field resonator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1988, 35, 435–436. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Shi, H.; Ma, T.; Qian, Z.; Kuznetsova, I.; Yuan, L.; Wang, J.; Du, J.; Zhang, C. High-frequency vibration analysis of LiTaO3 piezoelectric plates excited by lateral electric fields produced by surface electrodes under viscous liquid loadings for sensing. Smart Mater. Struct. 2020, 29, 045004. [Google Scholar] [CrossRef]
- Ma, T.; Hou, S.; Yu, F.; Xie, C.; Zhang, S.; Wang, J.; Du, J.; Zhan, J.; Cheng, X.; Wang, S. Electro-elastic characterization of Ca3TaGa3Si2O14 crystals for lateral-field-excitation acoustic wave sensing applications. J. Alloys Compd. 2017, 728, 518–524. [Google Scholar] [CrossRef]
- Lee, P.; Chen, S.s. Vibrations of Contoured and Partially Plated, Contoured, Rectangular, at-Cut Quartz Plates. J. Acoust. Soc. Am. 1969, 46, 1193–1202. [Google Scholar] [CrossRef]
- Lee, P.; Wang, J. Piezoelectrically forced thickness-shear and flexural vibrations of contoured quartz resonators. J. Appl. Phys. 1996, 79, 3411–3422. [Google Scholar] [CrossRef]
- Wang, J.; Du, J.; Shen, L.; Yang, Z. The thermal effect of metal electrodes on thickness-shear vibrations of crystal plates. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 2331–2336. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Li, J. Energy trapping of thickness-shear vibration modes of elastic plates with functionally graded materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 687–690. [Google Scholar] [CrossRef]
- Shi, J.; Fan, C.; Zhao, M.; Yang, J. Variational formulation of the Stevens-Tiersten equation and application in the analysis of rectangular trapped-energy quartz resonators. J. Acoust. Soc. Am. 2014, 135, 175–181. [Google Scholar] [CrossRef]
- Ma, T.; Wang, J.; Du, J.; Yang, J. Resonances and energy trapping in AT-cut quartz resonators operating with fast shear modes driven by lateral electric fields produced by surface electrodes. Ultrasonics 2015, 59, 14–20. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Shen, L.; Yang, J. Effects of electrodes with continuously varying thickness on energy trapping in thickness-shear mode quartz resonators. Ultrasonics 2008, 48, 150–154. [Google Scholar] [CrossRef] [PubMed]
- Yu, F.; Zhang, S.; Zhao, X.; Yuan, D.; Qin, L.; Wang, Q.-M.; Shrout, T.R. Dielectric and electromechanical properties of rare earth calcium oxyborate piezoelectric crystals at high temperatures. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 868–873. [Google Scholar] [PubMed]
- Mindlin, R. High frequency vibrations of piezoelectric crystal plates. Int. J. Solids Struct. 1972, 8, 895–906. [Google Scholar] [CrossRef]
- Mindlin, R.; Spencer, W. Anharmonic, Thickness-Twist Overtones of Thickness-Shear and Flexural Vibrations of Rectangular, AT-Cut Quartz Plates. J. Acoust. Soc. Am. 1967, 42, 1268–1277. [Google Scholar] [CrossRef]
- Chen, D.; Zhao, P.; Sun, F.; Ma, T.; Yuan, L.; Wu, R.; Li, P.; Qian, Z. Resonance Analysis of Piezoelectric Bulk Acoustic Wave Devices Based on YCOB Crystals with Monoclinic Symmetry Excited by Lateral Electric Fields. Crystals 2022, 12, 542. [Google Scholar] [CrossRef]
- Jia, N.; Wang, T.; Ning, L.; Wang, Y.; Dang, Y.; Ma, Z.; Du, H.; Li, F.; Xu, Z. Comparing Different Electrodes of Piezoelectric Single Crystal Composites for Underwater Acoustic Transducers. ACS Appl. Electron. Mater. 2022, 5, 350–356. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Kang, P.; Ma, T.; Yao, Y.; Gan, N.; Li, P.; Qian, Z.; Kuznetsova, I.; Nedospasov, I.; Hu, W. Energy-Trapping Characteristics of Lateral Field Excited GdCOB Crystal Bulk Acoustic Wave Devices Based on Stepped Electrodes. Micromachines 2023, 14, 2162. https://doi.org/10.3390/mi14122162
Wu B, Kang P, Ma T, Yao Y, Gan N, Li P, Qian Z, Kuznetsova I, Nedospasov I, Hu W. Energy-Trapping Characteristics of Lateral Field Excited GdCOB Crystal Bulk Acoustic Wave Devices Based on Stepped Electrodes. Micromachines. 2023; 14(12):2162. https://doi.org/10.3390/mi14122162
Chicago/Turabian StyleWu, Bowei, Pengfei Kang, Tingfeng Ma, Yuming Yao, Ning Gan, Peng Li, Zhenghua Qian, Iren Kuznetsova, Ilya Nedospasov, and Wenhui Hu. 2023. "Energy-Trapping Characteristics of Lateral Field Excited GdCOB Crystal Bulk Acoustic Wave Devices Based on Stepped Electrodes" Micromachines 14, no. 12: 2162. https://doi.org/10.3390/mi14122162