
Flexible Capacitive Pressure Sensor Based on a Double-Sided Microstructure Porous Dielectric Layer

Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation
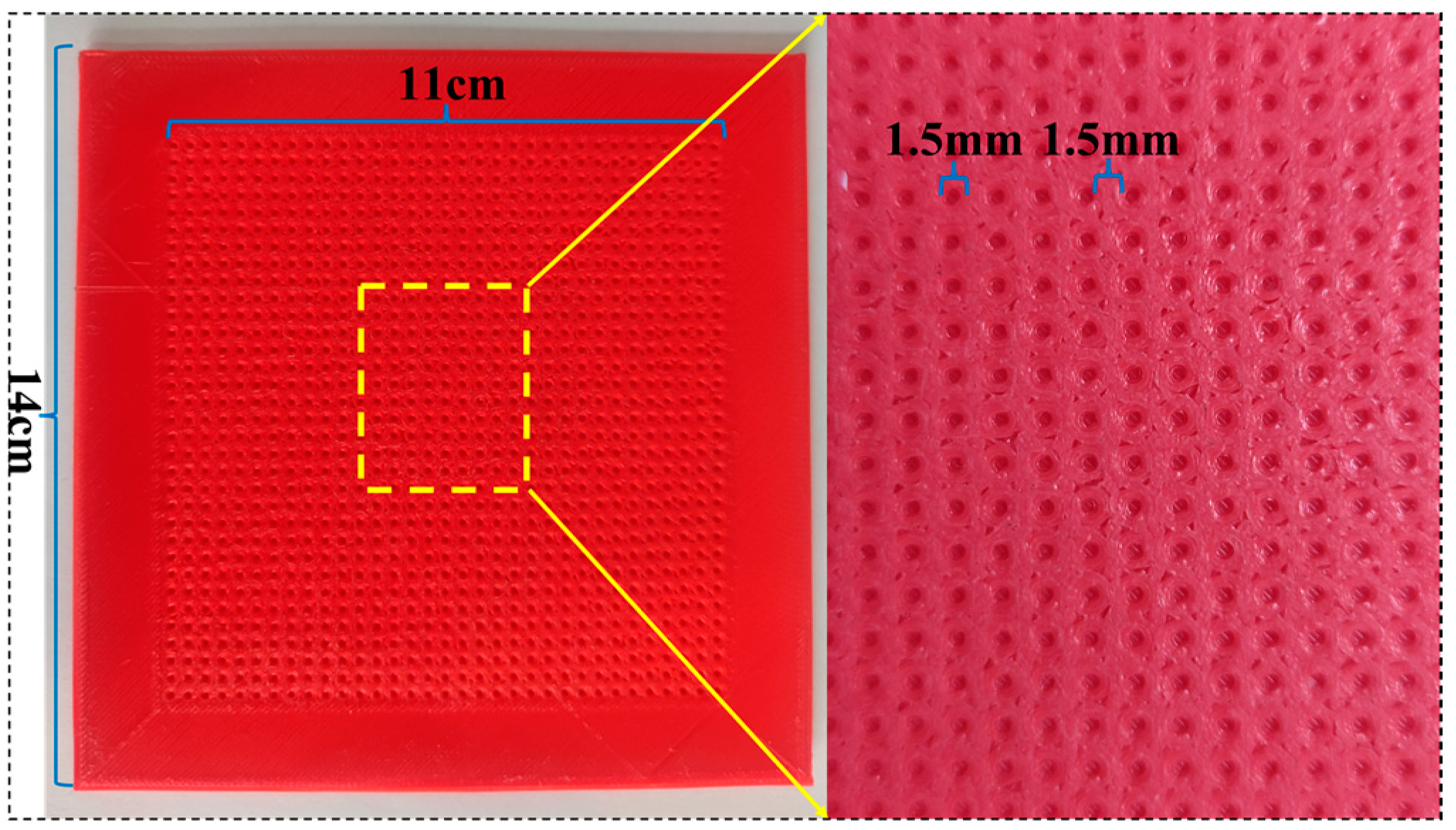
2.2.1. Microstructure Mold
2.2.2. Composite Material
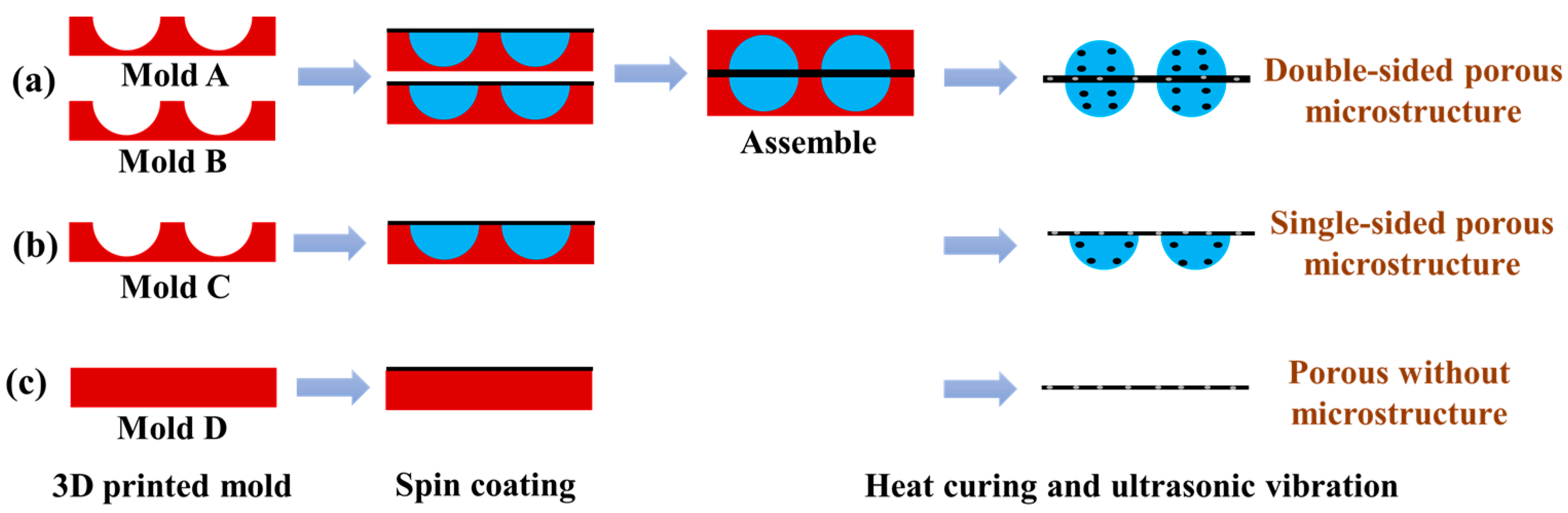
2.3. Fabrication of the Dielectric Layer
2.4. Fabrication of the Electrode Layer
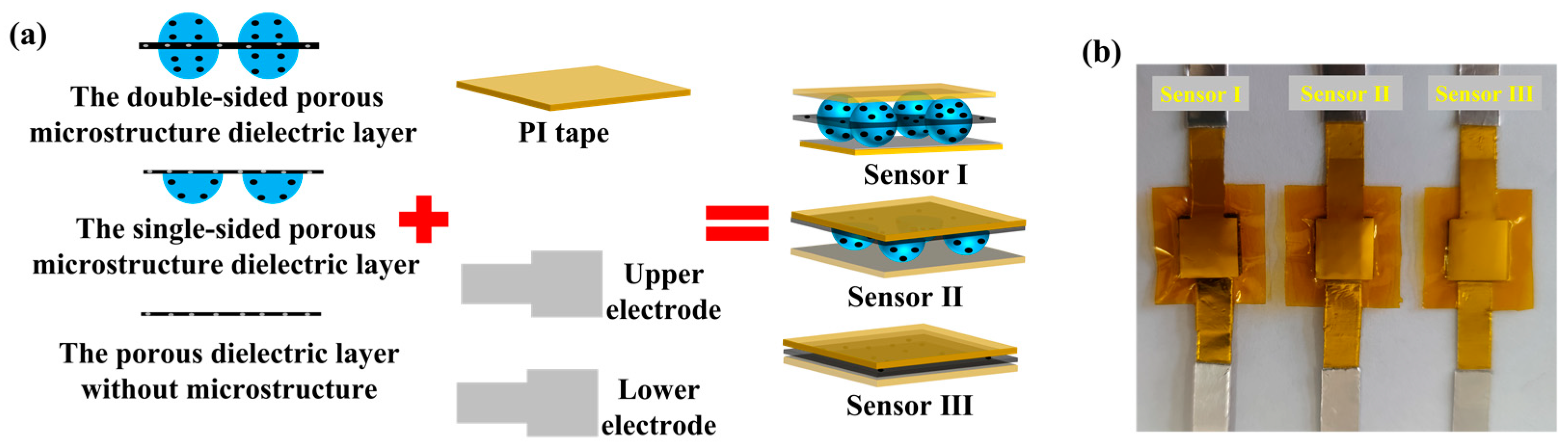
2.5. Sensor Packaging
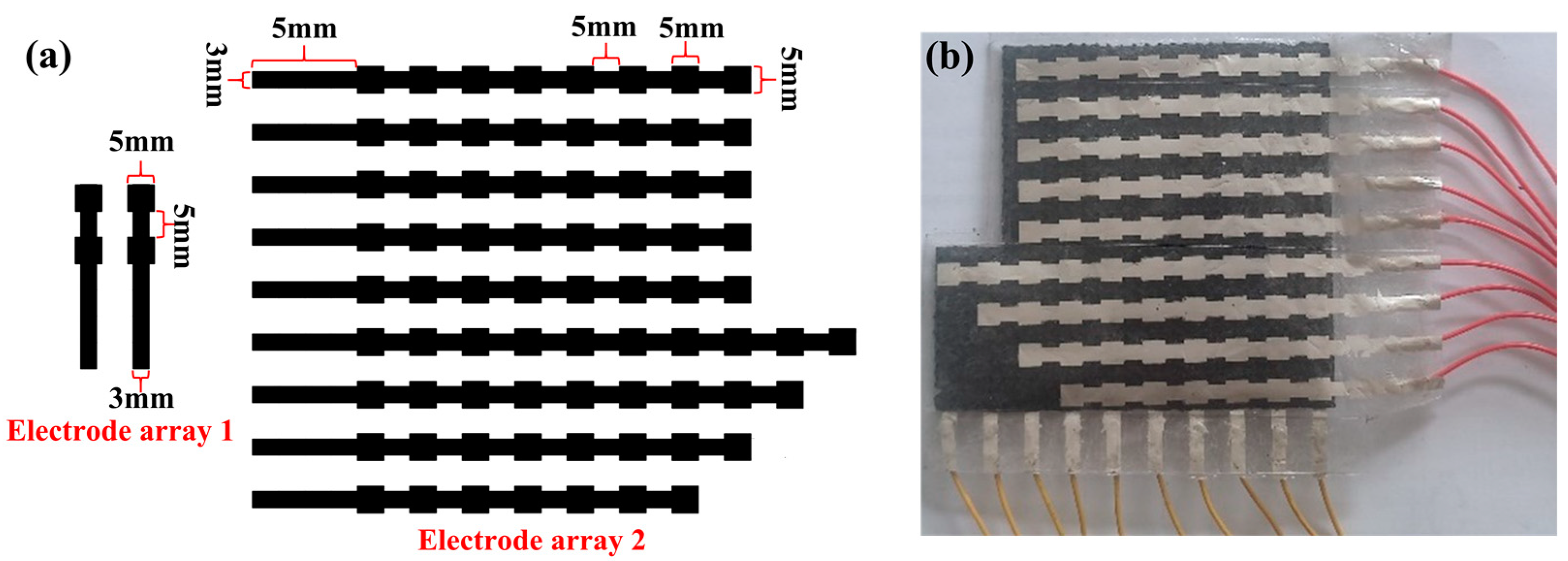
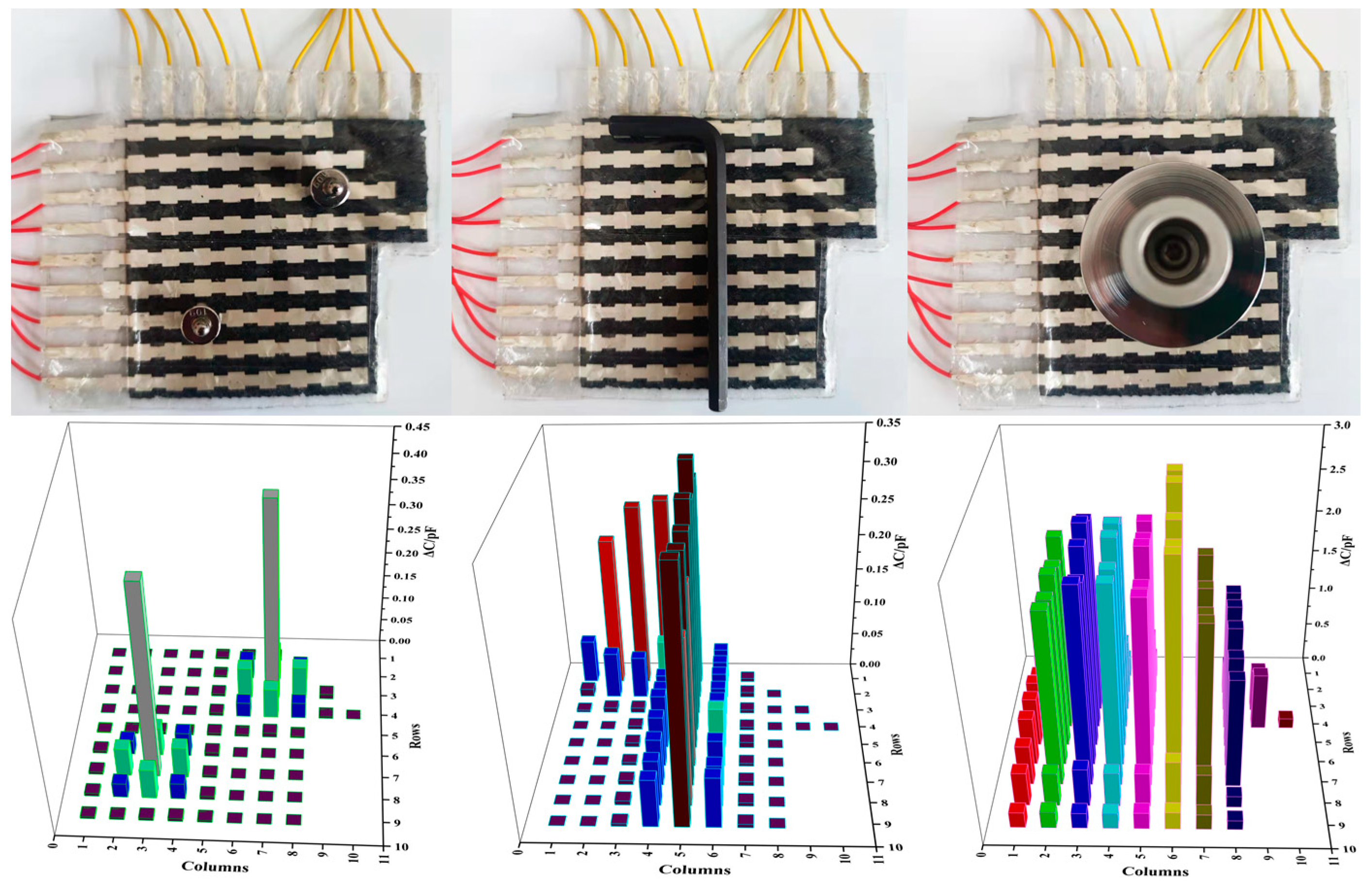
2.6. Fabrication of the Sensor Pressure Array
2.7. Characterization and Measurements
3. Results and Discussions
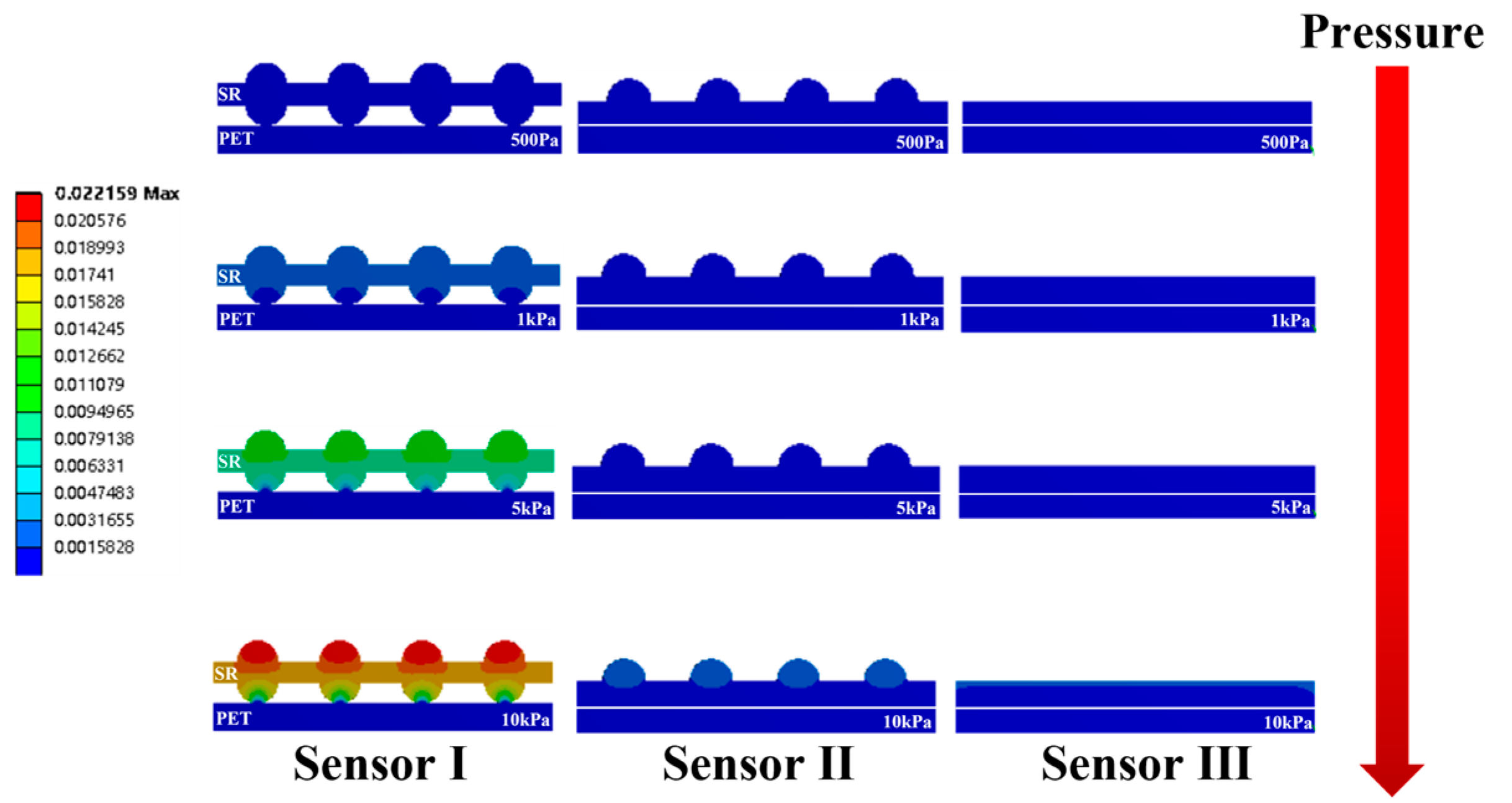
3.1. Finite Element Analysis of Dielectric Layer Sensitivity
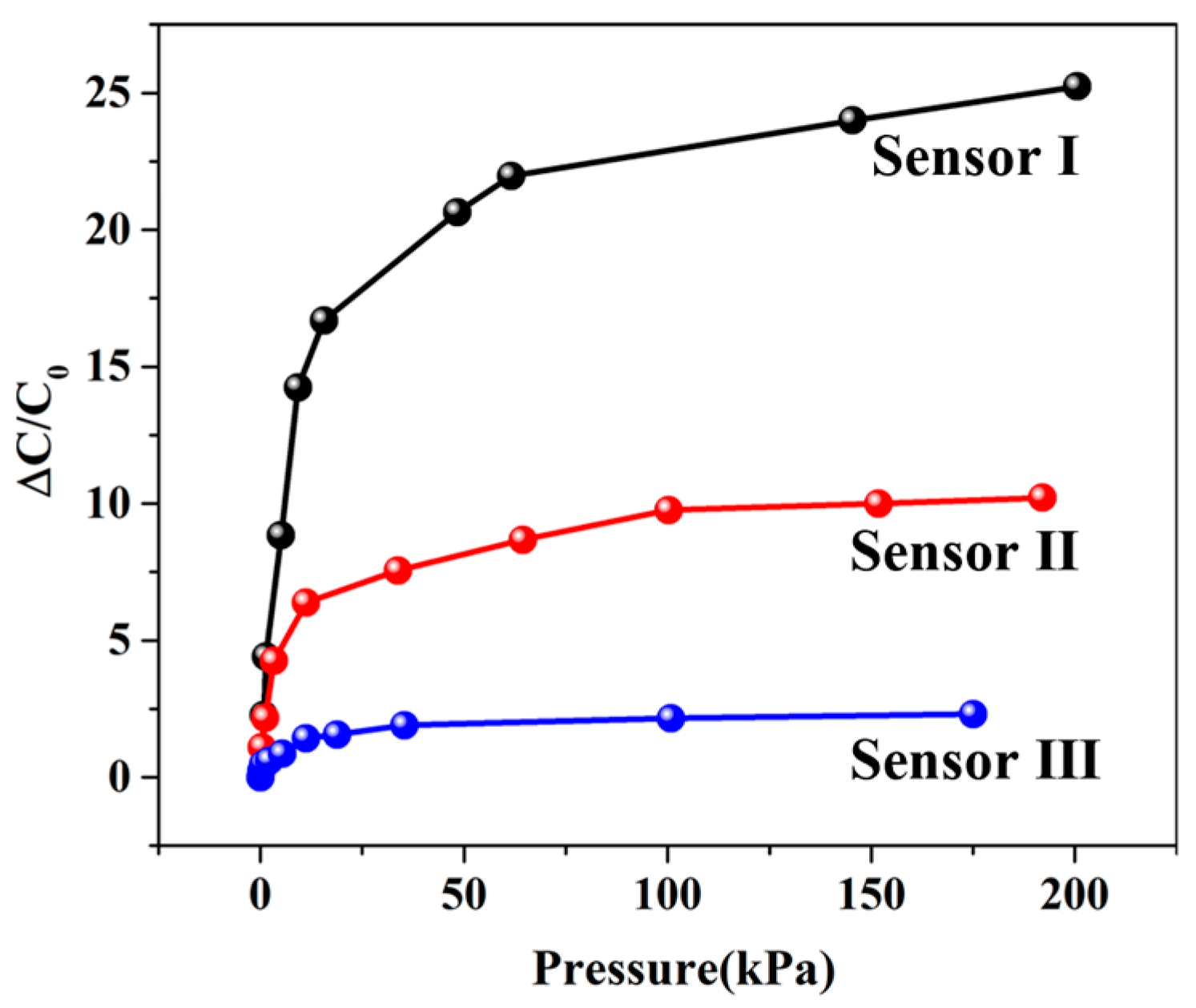
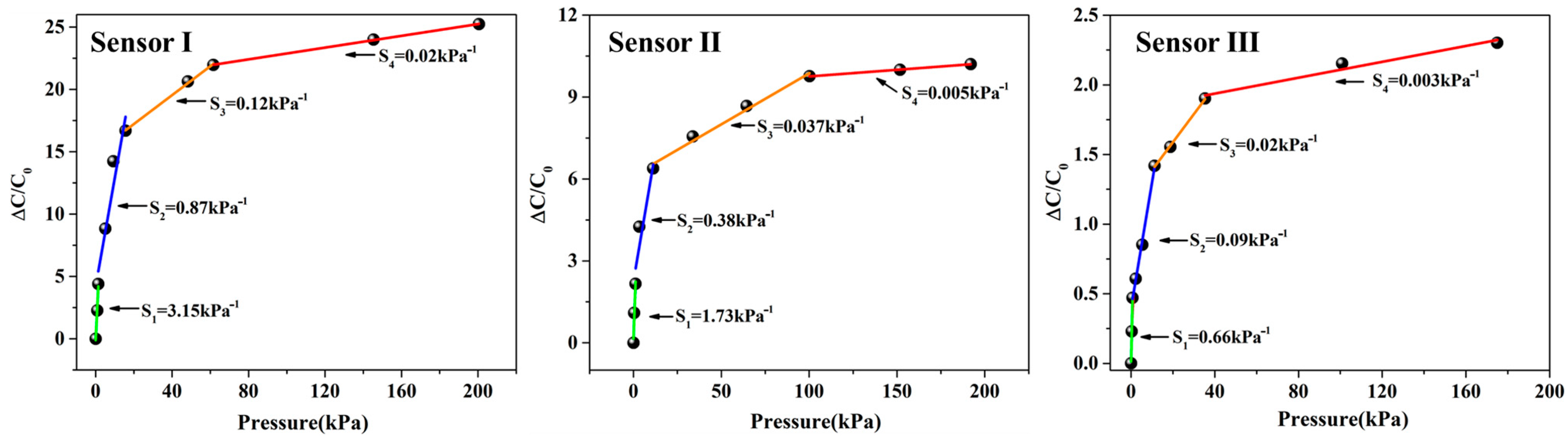
3.2. Sensitivity
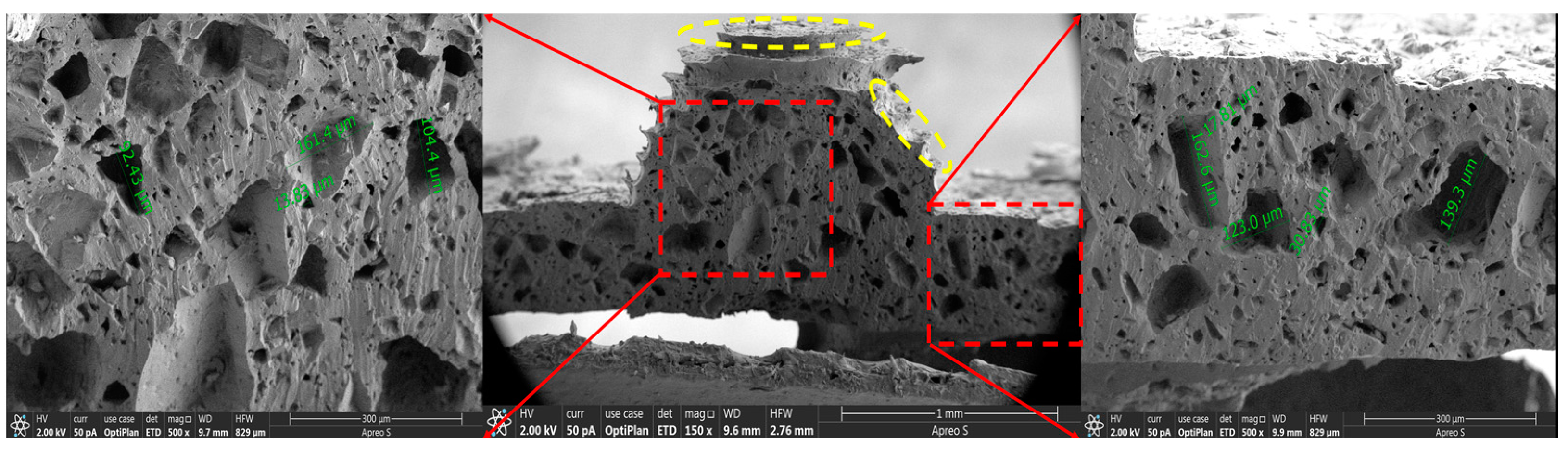
3.3. Characterization
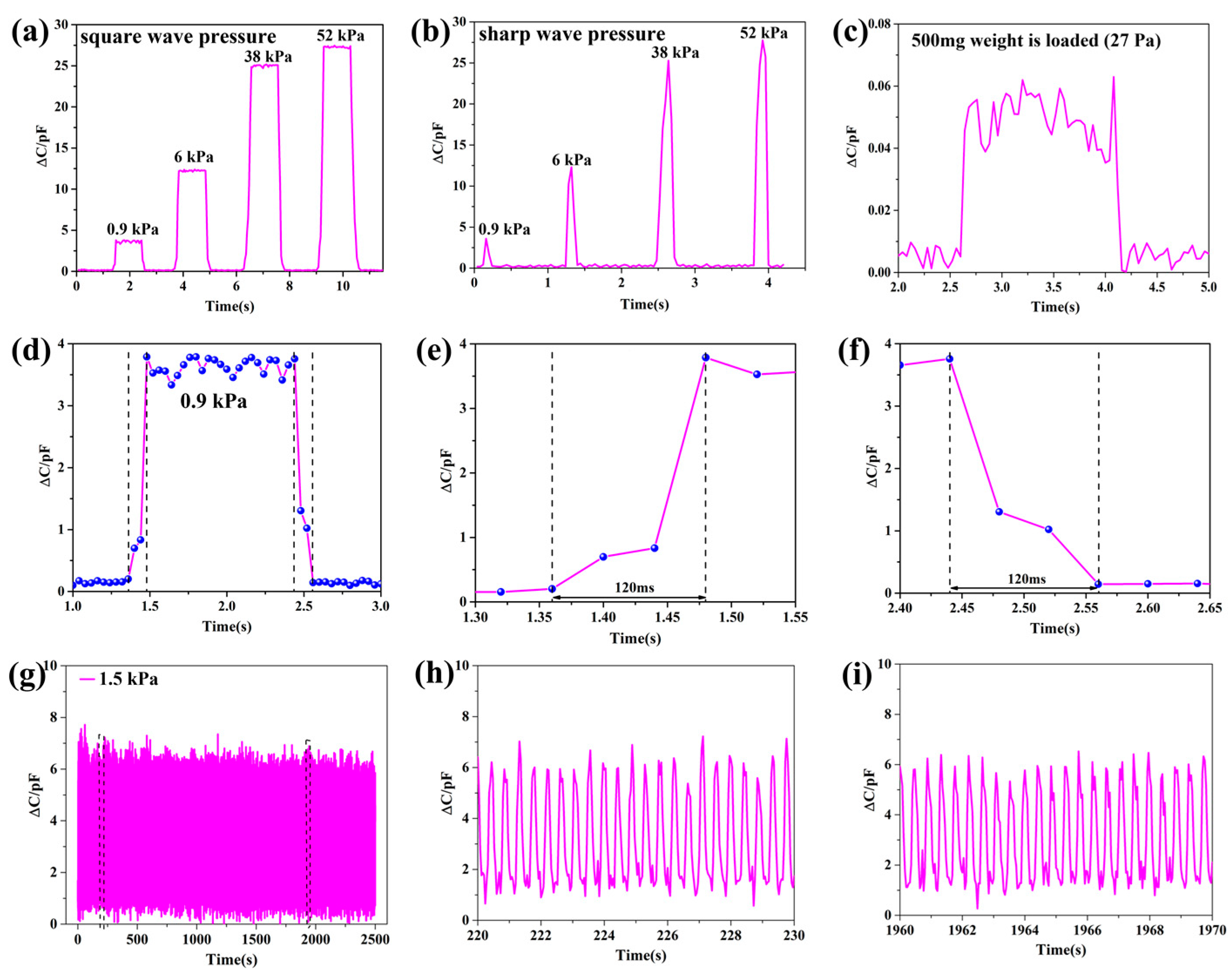
3.4. Dynamic Performance
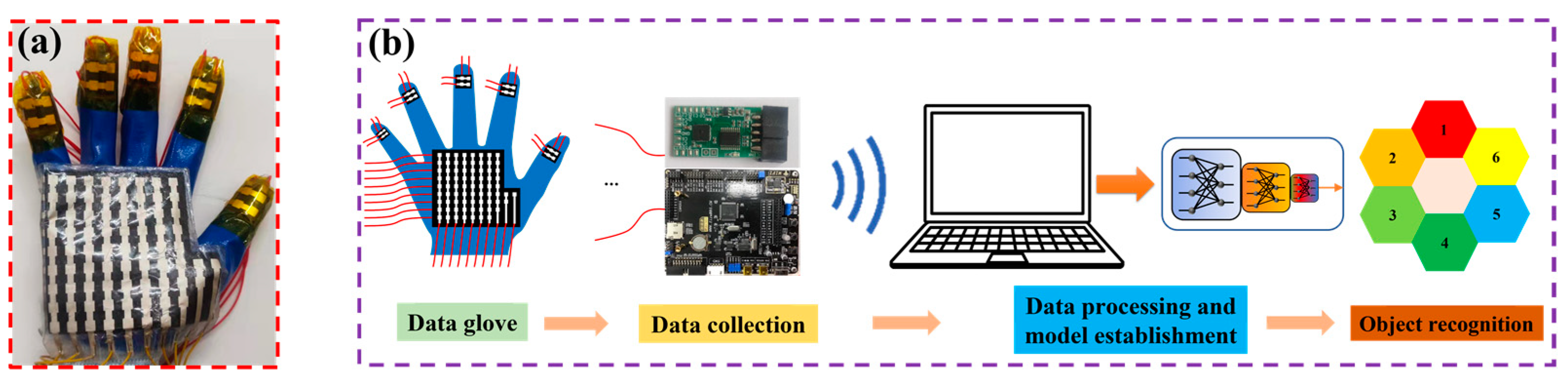
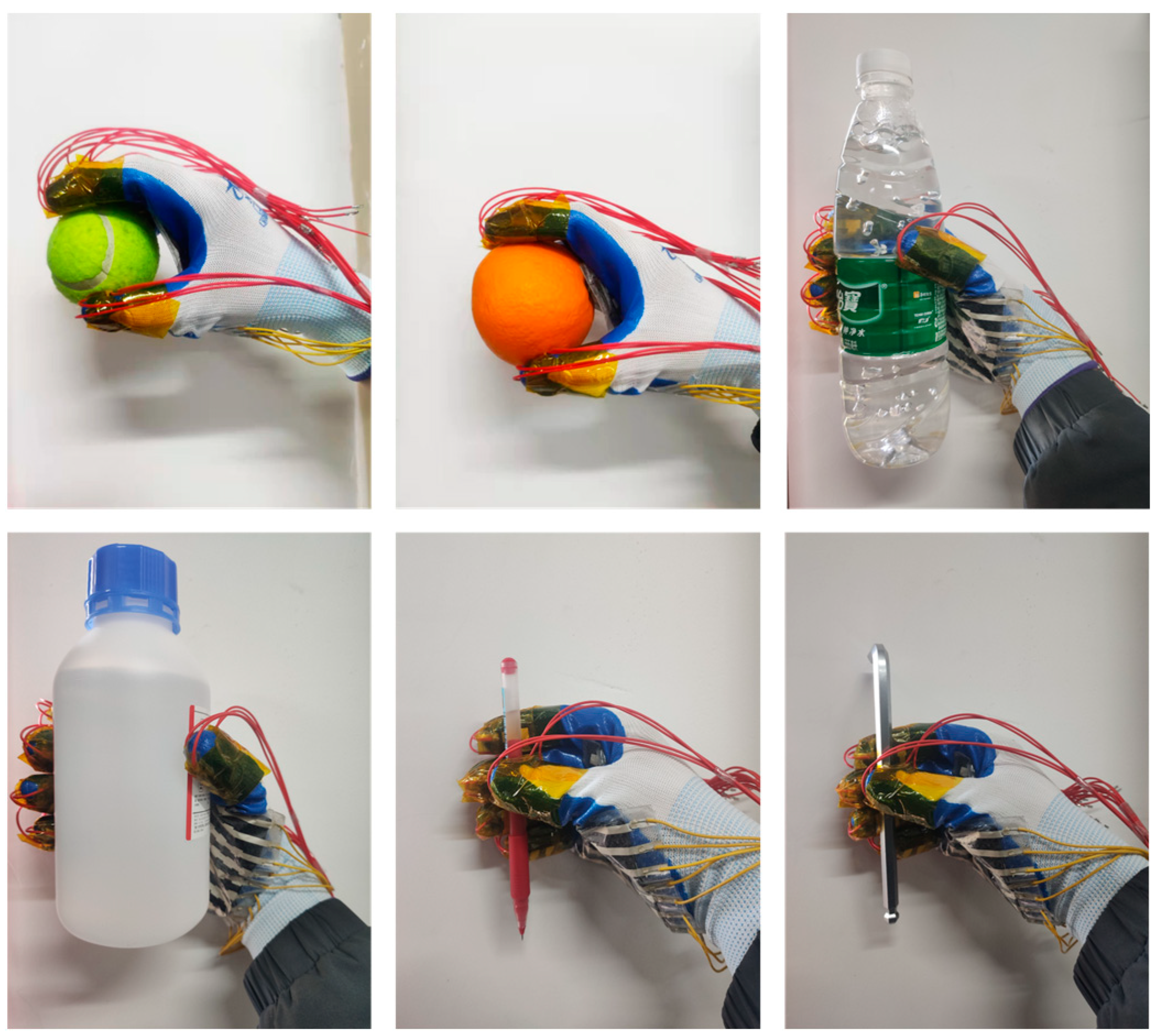
3.5. Application
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ji, B.; Zhou, Q.; Wu, J.B.; Gao, Y.B.; Wen, W.J.; Zhou, B.P. Synergistic Optimization toward the Sensitivity and Linearity of Flexible Pressure Sensor via Double Conductive Layer and Porous Microdome Array. ACS Appl. Mater. Interfaces 2020, 12, 31021–31035. [Google Scholar] [CrossRef]
- Lu, P.; Wang, L.; Zhu, P.; Huang, J.; Wang, Y.J.; Bai, N.N.; Wang, Y.; Li, G.; Yang, J.L.; Xie, K.W.; et al. Iontronic Pressure Sensor with High Sensitivity and Linear Response Over a Wide Pressure Range Based on Soft Micropillared Electrodes. Sci. Bull. 2021, 66, 1091–1100. [Google Scholar] [CrossRef]
- Yi, Z.R.; Liu, Z.X.; Li, W.B.; Ruan, T.; Chen, X.; Liu, J.Q.; Yang, B.; Zhang, W.M. Piezoelectric Dynamics of Arterial Pulse for Wearable Continuous Blood Pressure Monitoring. Adv. Mater. 2022, 34, 2110291. [Google Scholar] [CrossRef]
- Lee, S.; Park, J.-W. Fingerprint-Inspired Triboelectric Nanogenerator with a Geometrically Asymmetric Electrode Design for a Self-Powered Dynamic Pressure Sensor. Nano Energy 2022, 101, 107546. [Google Scholar] [CrossRef]
- Yan, Y.C.; Hu, Z.; Yang, Z.B.; Yuan, W.Z.; Song, C.Y.; Pan, J.; Shen, Y.J. Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef]
- Wang, P.; Liu, J.; Yu, W.; Li, G.X.; Meng, C.Z.; Guo, S.J. Flexible, Stretchable, Breathable and Sweatproof All-Nanofiber Iontronic Tactile Sensor for Continuous and Comfortable Knee Joint Motion Monitoring. Nano Energy 2022, 103, 107768. [Google Scholar] [CrossRef]
- Abramson, A.; Chan, C.T.; Khan, Y.; Mermin-Bunnell, A.; Matsuhisa, N.; Fong, R.; Shad, R.; Hiesinger, W.; Mallick, P.; Gambhir, S.S.; et al. A Flexible Electronic Strain Sensor Forthe Real-Time Monitoring Oftumor Regression. Sci. Adv. 2022, 8, 6550. [Google Scholar] [CrossRef]
- Guan, J.R.; Zhang, D.Z.; Li, T.T. Flexible Pressure Sensor Based on Molybdenum Diselide/Multi-Walled Carbon Nanotubes for Human Motion Detection. IEEE Sens. J. 2021, 21, 10491–10497. [Google Scholar] [CrossRef]
- Osborn, L.E.; Dragomir, A.; Betthauser, J.L.; Hunt, C.; Nguyen, H.H.; Kaliki, R.R.; Thakor, N.V. Prosthesis with Neuromorphic Multilayered E-dermis Perceives Touch and Pain. Sci. Robot. 2018, 3, eaat3818. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.R.; Wang, H.T.; Li, J.-A.; Zhang, S.M.; Li, H.; Ma, Z.; Xin, M.; Yan, K.; Cheng, W.; He, D.W.; et al. High-Performance Flexible Capacitive Proximity and Pressure Sensors with Spiral Electrodes for Continuous Human-Machine Interaction. ACS Mater. Lett. 2022, 4, 2261–2272. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, J.Q.; Xiao, J.L.; Kang, Y.R.; Yu, L.T.; Jiang, C.P.; Pan, Y.X.; Dong, H.; Gao, S.K.; Wang, Y.C. A High-Resolution, Ultrabroad-Range and Sensitive Capacitive Tactile Sensor Based on a CNT/PDMS Composite for Robotic Handst. Nanoscale 2021, 13, 18780. [Google Scholar] [CrossRef]
- Qin, R.Z.; Hu, M.J.; Li, X.; Liang, T.; Tan, H.Y.; Liu, J.Z.; Shan, G.C. A New Strategy for the Fabrication of a Flexible and Highly Sensitive Capacitive Pressure Sensor. Microsyst. Nanoeng. 2021, 7, 100. [Google Scholar] [CrossRef]
- Li, y.; Cao, Z.G.; Li, T.; Sun, F.C.; Bai, Y.Y.; Lu, Q.F.; Wang, S.Q.; Yang, X.Q.; Hao, M.Z.; Lan, N.; et al. Highly Selective Biomimetic Flexible Tactile Sensor for Neuroprosthetics. Research 2020, 2020, 8910692. [Google Scholar] [CrossRef]
- Wu, J.N.; Yao, Y.G.; Zhang, Y.H.; Shao, T.Y.; Wu, H.; Liu, S.Y.; Li, Z.; Wu, L.M. Rational Design of Flexible Capacitive Sensors with Highly Linear Response Over a Broad Pressure Sensing Range. Nanoscale 2020, 12, 201198. [Google Scholar] [CrossRef]
- Quan, Y.; Wei, X.B.; Xiao, L.; Wu, T.; Pang, H.Y.; Liu, T.F.; Huang, W.; Wu, S.H.; Li, S.B.; Chen, Z. Highly Sensitive and Stable Flexible Pressure Sensors with MicroStructured Electrodes. J. Alloys Compd. 2017, 699, 824–831. [Google Scholar] [CrossRef]
- Bai, N.N.; Wang, L.; Xue, Y.H.; Wang, Y.; Hou, X.Y.; Li, G.; Zhang, Y.; Cai, M.K.; Zhao, L.Y.; Guan, F.Y.; et al. Graded Interlocks for Iontronic Pressure Sensors with High Sensitivity and High Linearity over a Broad Range. Acs Nano 2022, 16, 4338–4347. [Google Scholar] [CrossRef]
- Cheng, W.; Wang, J.; Ma, Z.; Yan, K.; Wang, Y.M.; Wang, H.T.; Li, S.; Li, Y.; Pan, L.J.; Shi, Y. Flexible Pressure Sensor with High Sensitivity and Low Hysteresis Based on a Hierarchically Microstructured Electrode. IEEE Electron Device Lett. 2018, 39, 288–291. [Google Scholar] [CrossRef]
- Ruth, S.R.A.; Beker, L.; Tran, H.; Feig, V.R.; Matsuhisa, N.; Bao, Z.N. Rational Design of Capacitive Pressure Sensors Based on Pyramidal Microstructures for Specialized Monitoring of Biosignals. Adv. Funct. Mater. 2020, 30, 1903100. [Google Scholar] [CrossRef]
- Liang, G.H.; Wang, Y.C.; Mei, D.Q.; Xi, K.L.; Chen, Z.C. Flexible Capacitive Tactile Sensor Array With Truncated Pyramids as Dielectric Layer for Three-Axis Force Measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Zhuo, B.G.; Chen, S.J.; Zhao, M.G.; Guo, X.J. High Sensitivity Flexible Capacitive Pressure Sensor Using Polydimethylsiloxane Elastomer Dielectric Layer Micro-Structured by 3-D Printed Mold. IEEE J. Electron Devices Soc. 2017, 5, 219–223. [Google Scholar] [CrossRef]
- Bai, N.N.; Wang, L.; Wang, Q.; Deng, J.; Wang, Y.; Lu, P.; Huang, J.; Li, G.; Zhang, Y.; Yang, J.L.; et al. Graded Intrafillable Architecture-Based Iontronic Pressure Sensor with Ultra-Broad-Range High Sensitivity. Nat. Commun. 2020, 11, 209. [Google Scholar] [CrossRef] [Green Version]
- Shuai, X.T.; Zhu, P.L.; Zeng, W.J.; Hu, Y.G.; Liang, X.W.; Zhang, Y.; Sun, R.; Wong, C.-P. Highly Sensitive Flexible Pressure Sensor Based on Silver NanowiresEmbedded Polydimethylsiloxane Electrode with Microarray Structure. Acs Appl. Mater. Inter. 2017, 9, 26314–26324. [Google Scholar] [CrossRef]
- Zeng, X.W.; Wang, Z.X.; Zhang, H.; Yang, W.; Xiang, L.; Zhao, Z.Z.; Peng, L.-M.; Hu, Y.F. Tunable, Ultrasensitive, and Flexible Pressure Sensors Based on Wrinkled Microstructures for Electronic Skins. ACS Appl. Mater. Inter. 2019, 11, 21218–21226. [Google Scholar] [CrossRef]
- Yao, S.J.; Yu, J.P.; Jiang, X.L.; Xu, J.F.; Lan, K.; Yao, Z.H. Fabrication and Experimental Validation of a Sensitive and Robust Tactile Sensing Array with a Micro-Structured Porous Dielectric Layer. Micromachines 2022, 13, 1724. [Google Scholar] [CrossRef]
- Guo, Y.J.; Gao, S.; Yue, W.J.; Zhang, C.W.; Li, Y. AAO-Assisted Low-Cost Flexible Capacitive Pressure Sensors Based on Double-Sided Nanopillars by Facile Fabrication Method. ACS Appl. Mater. Interfaces 2019, 11, 48594–48603. [Google Scholar] [CrossRef]
- Pruvost, M.; Smit, W.J.; Monteux, C.; Poulin, P.; Colin, A. Polymeric Foams for Flexible and Highly Sensitive Low-Pressure Capacitive Sensors. Npj Flex. Electron. 2019, 3, 7. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.Y.; Li, C.L.; Wang, Z.T.; Li, Y.F.; Huang, J.Q.; Yu, H.Y. Wide-Range Flexible Capacitive Pressure Sensors Based on Origami Structure. IEEE Sens. J. 2021, 21, 9798–9807. [Google Scholar] [CrossRef]
- Yu, H.Y.; Guo, C.X.; Ye, X.; Pan, Y.F.; Tu, J.C.; Wu, Z.; Liu, X.Y.; Huang, J.Q.; Ren, Q.Y.; Li, Y.F. Wide-Range Flexible Capacitive Pressure Sensors Based on Dielectrics with Various Porosity. Micromachines 2022, 13, 1588. [Google Scholar] [CrossRef]
- Xiong, Y.X.; Shen, Y.K.; Tian, L.; Hu, Y.G.; Zhu, P.L.; Sun, R.; Wong, C.-P. A Flexible, Ultra-Highly Sensitive and Stable Capacitive Pressure Sensor with Convex Microarrays for Motion and Health Monitoring. Nano Energy 2020, 70, 104436. [Google Scholar] [CrossRef]
- Li, G.Z.; Liu, S.Q.; Wang, L.Q.; Zhu, R. Skin-Inspired Quadruple Tactile Sensors Integrated on a Robot Hand Enable Object Recognition. Sci. Robot. 2020, 5, 8134. [Google Scholar] [CrossRef]
- Sundaram, S.; Kellnhofer, P.; Li, Y.Z.; Zhu, J.-Y.; Torralba, A.; Matusik, W. Learning the Signatures of the Human Grasp Using a Scalable Tactile Glove. Nature 2019, 569, 698–702. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
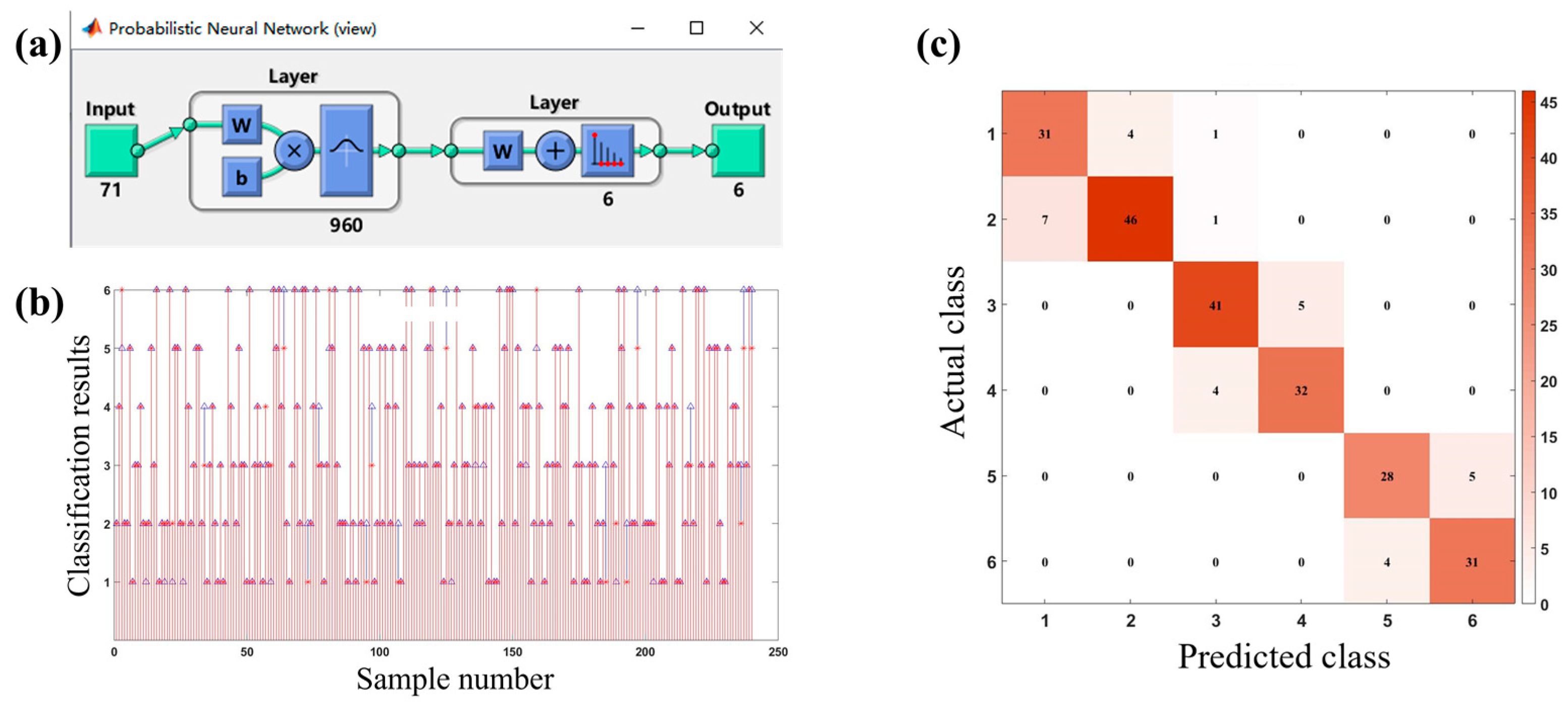
| Object Number | Recognition Accuracy | Overall Recognition Accuracy |
|---|---|---|
| 1 | 86.1% | 87.1% |
| 2 | 85.2% | |
| 3 | 89.1% | |
| 4 | 88.9% | |
| 5 | 84.8% | |
| 6 | 88.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Zhang, J. Flexible Capacitive Pressure Sensor Based on a Double-Sided Microstructure Porous Dielectric Layer. Micromachines 2023, 14, 111. https://doi.org/10.3390/mi14010111
Yu Q, Zhang J. Flexible Capacitive Pressure Sensor Based on a Double-Sided Microstructure Porous Dielectric Layer. Micromachines. 2023; 14(1):111. https://doi.org/10.3390/mi14010111
Chicago/Turabian StyleYu, Qingyang, and Jian Zhang. 2023. "Flexible Capacitive Pressure Sensor Based on a Double-Sided Microstructure Porous Dielectric Layer" Micromachines 14, no. 1: 111. https://doi.org/10.3390/mi14010111