
GO-INO: Graph Optimization MEMS-IMU/NHC/Odometer Integration for Ground Vehicle Positioning
Abstract
:1. Introduction
2. KF-GNSS/INS/NHC Integration
2.1. State Propagation and Measurement Model
2.2. NHC Measurement Model
2.3. Odometer Measurement Model
2.4. Kalman Filter
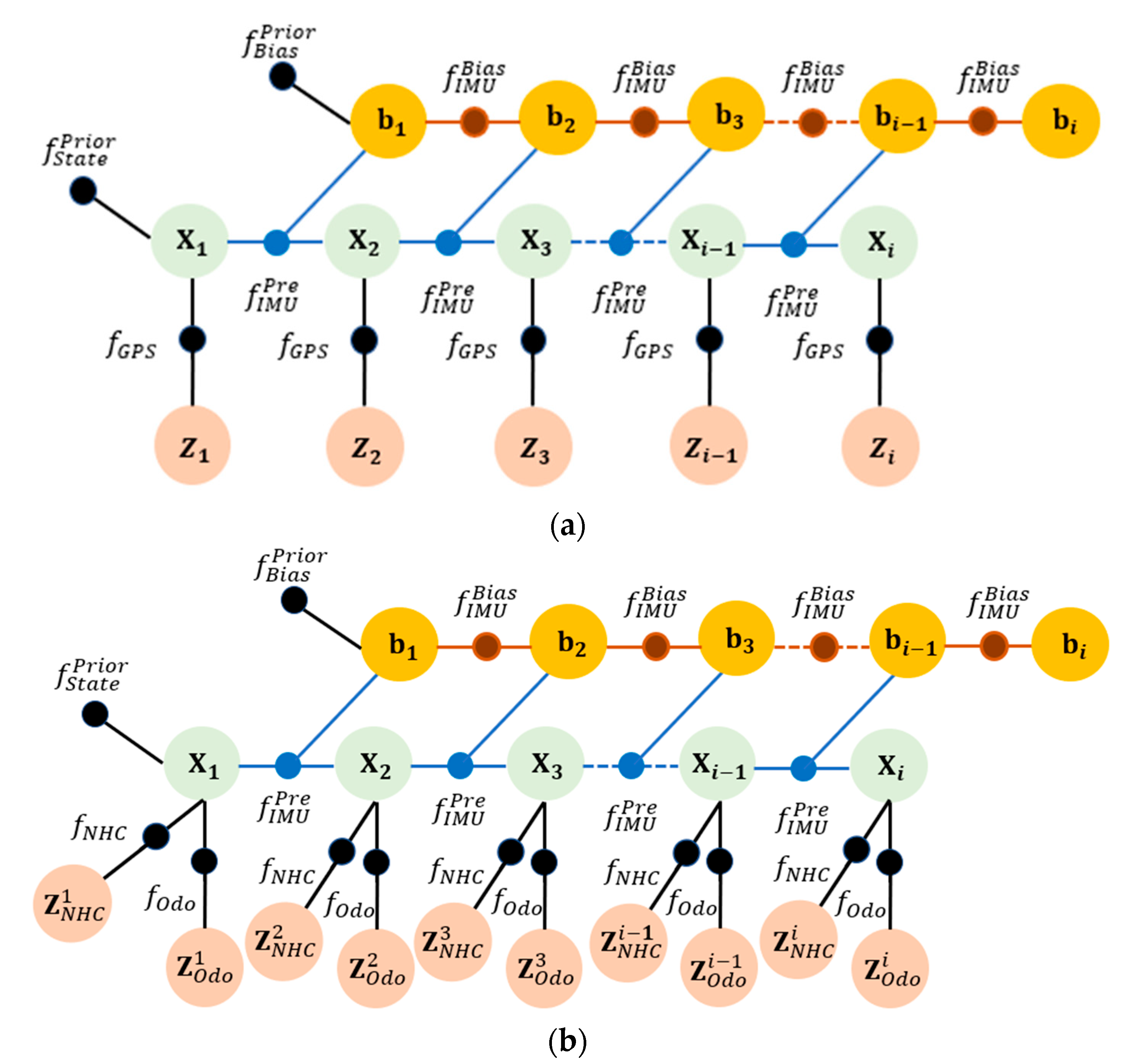
3. FGO-GNSS/INS/NHC/Odometer
3.1. IMU Preintegration Factor
3.2. GNSS Factor
3.3. NHC Factor
3.4. Odometer Factor
3.5. FGO
4. Experiments and Results
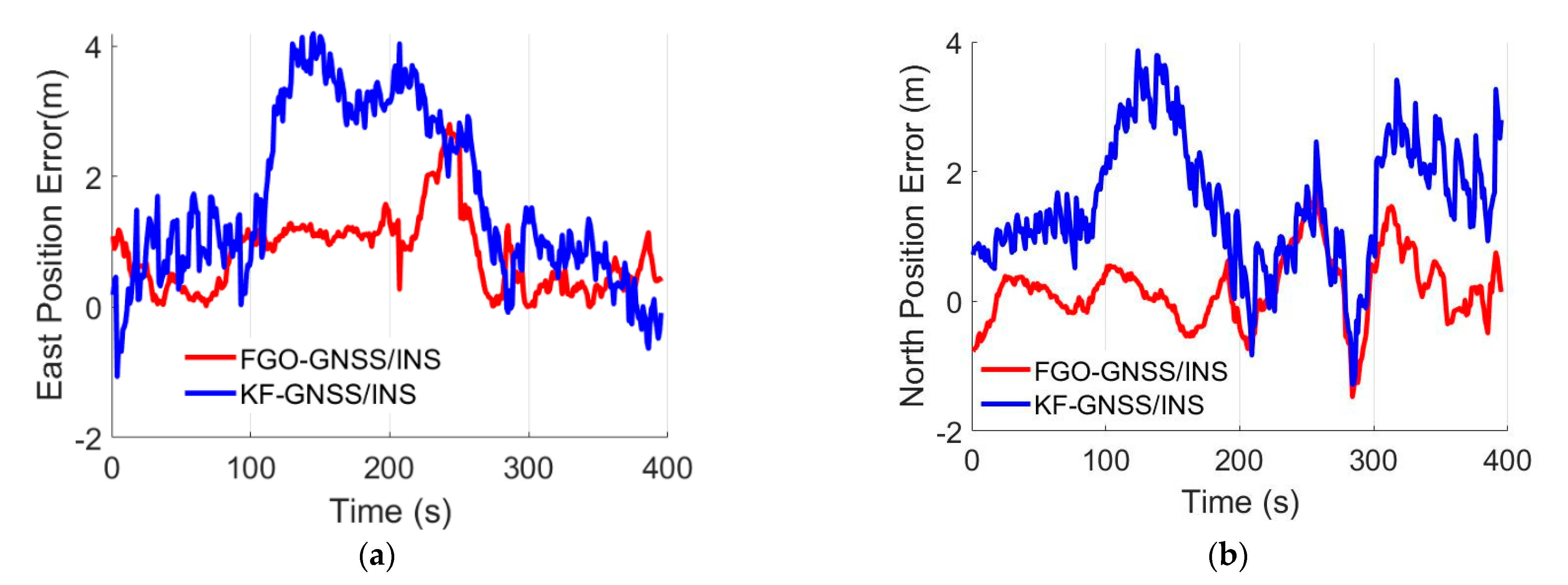
4.1. FGO-GNSS/INS Performance Assessment
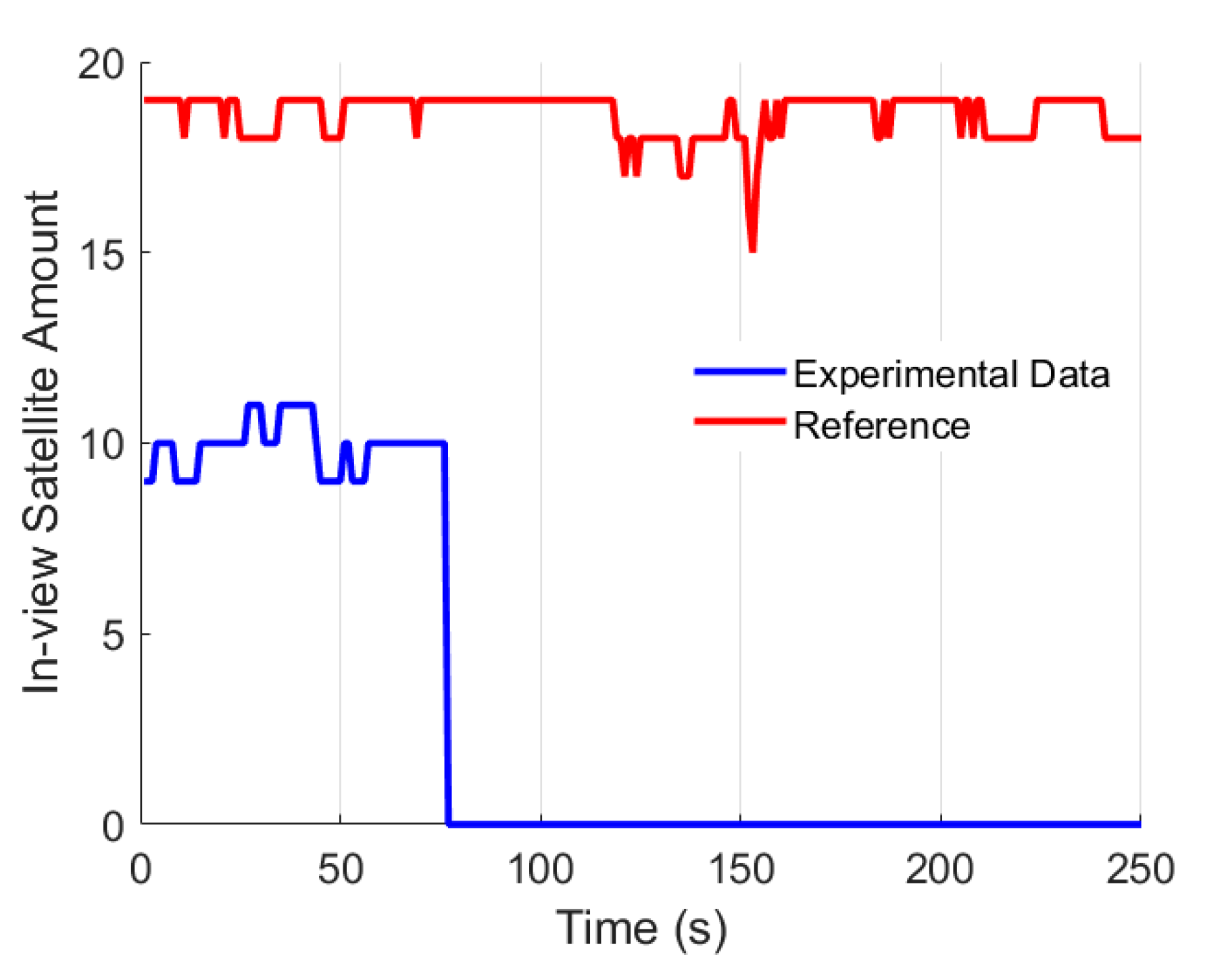
4.2. FGO-INS/NHC/Odometer under GNSS-Denied Environments
5. Limitations and Discussion
- (1)
- in the paper, the optimization is conducted using all the past information, and the computation load increases exponentially. Now, it is still hard to implement the FGO in a real-time manner; it is helpful to reduce the computation load with a fixed smoothing window.
- (2)
- the measurement noises are subject to Gaussian distribution, as the position errors’ distribution plotted in Figure 7 is not strictly subject to standard Gaussian distribution. In addition, due to the environmental influence, the GNSS or INS measurement errors covariance matrix might be changed; it was more feasible for adaptively tuning the errors matrix in the FGO method; in fact, some adaptive KFs have been proposed and demonstrated in dealing with this problem, and some strategies could be adopted and utilized in FGO.
- (3)
- in urban areas, GNSS measurements might face abnormal measures induced by the multipath or non-line-of-sight (NLOS) signals; it is adequate to add some kernel functions to the FGO to mitigate the adverse effects and improve the robustness of the navigation solutions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, T.; Liu, H.; Chen, Q.; Zhang, H.; Niu, X. Improvement of GNSS carrier phase accuracy using MEMS accelerometer-aided phase-locked loops for earthquake monitoring. Micromachines 2017, 8, 191. [Google Scholar] [CrossRef]
- Niu, X.; Ban, Y.; Zhang, Q.; Zhang, T.; Zhang, H.; Liu, J. Quantitative analysis to the impacts of IMU quality in GPS/INS deep integration. Micromachines 2015, 6, 1082–1099. [Google Scholar] [CrossRef]
- Wang, H.; Pan, S.; Gao, W.; Xia, Y.; Ma, C. Multipath/NLOS Detection Based on K-Means Clustering for GNSS/INS Tightly Coupled System in Urban Areas. Micromachines 2022, 13, 1128. [Google Scholar] [CrossRef]
- Bullock, J.B.; Chowdhary, M.; Rubin, D.; Leimer, D.; Turetzky, G.; Jarvis, M. Continuous indoor positioning using GNSS, Wi-Fi, and MEMS dead reckoning. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2408–2416. [Google Scholar]
- Joubert, N.; Reid TG, R.; Noble, F. Developments in Modern GNSS and Its Impact on Autonomous Vehicle Architectures. arXiv 2002, arXiv:2002.00339v2. [Google Scholar]
- Hansen, J.M.; Fossen, T.I.; Johansen, T.A. Nonlinear observer for INS aided by time-delayed GNSS measurements: Implementation and UAV experiments. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 157–166. [Google Scholar]
- Vagle, N.; Broumandan, A.; Lachapelle, G. Multiantenna GNSS and inertial sensors/odometer coupling for robust vehicular navigation. IEEE Internet Things J. 2018, 5, 4816–4828. [Google Scholar] [CrossRef]
- Gao, H.; Groves, P.D. Environmental context detection for adaptive navigation using GNSS measurements from a smartphone. Navig. J. Inst. Navig. 2018, 65, 99–116. [Google Scholar] [CrossRef]
- Pany, T.; Eissfeller, B. Use of a vector delay lock loop receiver for GNSS signal power analysis in bad signal conditions. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 893–903. [Google Scholar]
- Rost, C.; Wanninger, L. Carrier phase multipath mitigation based on GNSS signal quality measurements. J. Appl. Geod. 2009, 3, 81–87. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, Y.; Chen, S.; Bo, Y.; Feng, Z.; Zhou, H. Distributed processing method for multi-GNSS/SINS integration system. IET Sci. Meas. Technol. 2020, 14, 755–761. [Google Scholar] [CrossRef]
- Zhu, Z.; Jiang, C.; Bo, Y. Performance Enhancement of GNSS/MEMS-IMU Tightly Integration Navigation System Using Multiple Receivers. IEEE Access 2020, 8, 52941–52949. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Nassar, S.; Noureldin, A. Wavelet de-noising for IMU alignment. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 32–39. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2007, 57, 140–149. [Google Scholar] [CrossRef]
- Hou, H.; El-Sheimy, N. Inertial sensors errors modeling using Allan variance. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2860–2867. [Google Scholar]
- Nassar, S.; Niu, X.; Aggarwal, P.; El-Sheimy, N. INS/GPS sensitivity analysis using different Kalman filter approaches. In Proceedings of the Institute of Navigation National Technical Meeting (ION NTM 2006), Monterey, CA, USA, 18–20 January 2006. [Google Scholar]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Du, S.; Sun, W.; Gao, Y. Integration of GNSS and MEMS-Based Rotary INS for Bridging GNSS Outages. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume III; Springer: Berlin/Heidelberg, Germany, 2015; pp. 659–676. [Google Scholar]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM Algorithm Estimating Pseudo Measurements for Aiding INS during GNSS Signal Outages. Remote Sens. 2020, 12, 256. [Google Scholar] [CrossRef]
- Vana, S.; Naciri, N.; Bisnath, S. Low-cost, Dual-frequency PPP GNSS and MEMS-IMU Integration Performance in Obstructed Environments. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3005–3018. [Google Scholar]
- Seong, S.M.; Lee, J.G.; Park, C.G. Equivalent ARMA model representation for RLG random errors. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 286–290. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2019, 20, 250–260. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Nayak, J.; Terra, M.H.; Sabat, S.L. ARMA model based adaptive unscented fading Kalman filter for reducing drift of fiber optic gyroscope. Sens. Actuators A Phys. 2016, 251, 42–51. [Google Scholar] [CrossRef]
- Huang, L. Auto regressive moving average (ARMA) modeling method for Gyro random noise using a robust Kalman filter. Sensors 2015, 15, 25277–25286. [Google Scholar] [CrossRef]
- El-Diasty, M.; El-Rabbany, A.; Pagiatakis, S. An accurate nonlinear stochastic model for MEMS-based inertial sensor error with wavelet networks. J. Appl. Geod. JAG 2007, 1, 201–212. [Google Scholar] [CrossRef]
- Radi, A.; Bakalli, G.; Guerrier, S.; El-Sheimy, N.; Sesay, A.B.; Molinari, R. A multisignal wavelet variance-based framework for inertial sensor stochastic error modeling. IEEE Trans. Instrum. Meas. 2019, 68, 4924–4936. [Google Scholar] [CrossRef]
- Stebler, Y.; Guerrier, S.; Skaloud, J.; Victoria-Feser, P.M. Generalized method of wavelet moments for inertial navigation filter design. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2269–2283. [Google Scholar] [CrossRef]
- Xing, H.; Hou, B.; Lin, Z.; Guo, M. Modeling and compensation of random drift of MEMS gyroscopes based on least squares support vector machine optimized by chaotic particle swarm optimization. Sensors 2017, 17, 2335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, C.; Chen, S.; Chen, Y.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU de-noising method using long short term memory recurrent neural networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Chen, S.; Chen, Y.; Bo, Y.; Han, L.; Guo, J.; Feng, Z.; Zhou, H. Performance analysis of a deep simple recurrent unit recurrent neural network (SRU-RNN) in MEMS gyroscope de-noising. Sensors 2018, 18, 4471. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Bo, Y.; Jiang, C. A MEMS Gyroscope Noise Suppressing Method Using Neural Architecture Search Neural Network. Math. Probl. Eng. 2019, 2019, 5491243. [Google Scholar] [CrossRef]
- Ning, Y.; Wang, J.; Han, H.; Tan, X.; Liu, T. An optimal radial basis function neural network enhanced adaptive robust Kalman filter for GNSS/INS integrated systems in complex urban areas. Sensors 2018, 18, 3091. [Google Scholar] [CrossRef]
- Dai, F.; Bian, W.; Wang, Y.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2022, 16, 334–340. [Google Scholar] [CrossRef]
- Doostdar, P.; Keighobadi, J.; Hamed, M.A. INS/GNSS integration using recurrent fuzzy wavelet neural networks. GPS Solut. 2020, 24, 29. [Google Scholar] [CrossRef]
- Hosseinyalamdary, S. Deep Kalman filter: Simultaneous multi-sensor integration and modelling; A GNSS/IMU case study. Sensors 2018, 18, 1316. [Google Scholar] [CrossRef]
- Gao, X.; Luo, H.; Ning, B.; Zhao, F.; Bao, L.; Gong, Y.; Xiao, Y.; Jiang, J. RL-AKF: An Adaptive Kalman Filter Navigation Algorithm Based on Reinforcement Learning for Ground Vehicles. Remote Sens. 2020, 12, 1704. [Google Scholar] [CrossRef]
- Zhu, K.; Guo, X.; Jiang, C.; Xue, Y.; Li, Y.; Han, L.; Chen, Y. MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results. Sensors 2020, 20, 2302. [Google Scholar] [CrossRef]
- Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. [Google Scholar] [CrossRef] [PubMed]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU dead-reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Peng, K.Y.; Lin, C.A.; Chiang, K.W. Performance analysis of an AKF based tightly-coupled INS/GNSS integrated scheme with NHC for land vehicular applications. Trans. Can. Soc. Mech. Eng. 2013, 37, 503–513. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Niu, X. Estimate the Pitch and Heading Mounting Angles of the IMU for Land Vehicular GNSS/INS Integrated System. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6503–6515. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, Y.; Shi, C. Observability analysis of non-holonomic constraints for land-vehicle navigation systems. J. Glob. Position. Syst. 2012, 11, 80–88. [Google Scholar]
- Jiang, C.; Chen, Y.; Xu, B.; Jia, J.; Sun, H.; Chen, C.; Duan, Z.; Bo, Y.; Hyyppa, J. Vector Tracking Based on Factor Graph Optimization for GNSS NLOS Bias Estimation and Correction. IEEE Internet Things J. 2022, 9, 16209–16221. [Google Scholar] [CrossRef]
- Grisetti, G.; Kümmerle, R.; Strasdat, H.; Konolige, K. g2o: A general framework for (hyper) graph optimization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gyroscope | Bias stability (degree/h) | ≤3 degree/h |
| Scale factor nonlinearity (ppm) | ≤200 ppm | |
| White noise (degree/h) | 0.1 degree/h | |
| Accelerometer | Bias stability (mg) | 0.1 mg |
| Scale factor nonlinearity (ppm) | ≤150 ppm | |
| White noise (mg) | 0.05 mg |
| KF | GO | |||||
|---|---|---|---|---|---|---|
| East | North | Horizontal | East | North | Horizontal | |
| Mean (m) | 1.71 | 1.59 | 2.53 | 0.81 | 0.86 | 0.99 |
| RMS (m) | 1.25 | 0.91 | 1.19 | 0.58 | 0.46 | 0.58 |
| Maximum (m) | 4.20 | 3.87 | 5.50 | 2.81 | 2.47 | 3.15 |
| KF | FGO | |||
|---|---|---|---|---|
| Time (s) | Mean (m) | Maximum (m) | Mean (m) | Maximum (m) |
| 0~75 s | 1.50 | 1.99 | 0.74 | 1.25 |
| 76~165 s | 7.16 | 9.81 | 3.57 | 5.56 |
| 166~250 s | 9.14 | 22.09 | 4.62 | 13.62 |
| KF | FGO | |||
|---|---|---|---|---|
| Time (s) | Mean (m) | Maximum (m) | Mean (m) | Maximum (m) |
| 0~75 s | 0.77 | 1.49 | 0.39 | 1.03 |
| 76~165 s | 5.04 | 7.25 | 2.50 | 4.22 |
| 166~250 s | 9.87 | 25.10 | 4.92 | 12.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Yu, Y.; Wu, B.; Jiang, C. GO-INO: Graph Optimization MEMS-IMU/NHC/Odometer Integration for Ground Vehicle Positioning. Micromachines 2022, 13, 1400. https://doi.org/10.3390/mi13091400
Zhu K, Yu Y, Wu B, Jiang C. GO-INO: Graph Optimization MEMS-IMU/NHC/Odometer Integration for Ground Vehicle Positioning. Micromachines. 2022; 13(9):1400. https://doi.org/10.3390/mi13091400
Chicago/Turabian StyleZhu, Kai, Yating Yu, Bin Wu, and Changhui Jiang. 2022. "GO-INO: Graph Optimization MEMS-IMU/NHC/Odometer Integration for Ground Vehicle Positioning" Micromachines 13, no. 9: 1400. https://doi.org/10.3390/mi13091400