1. Introduction
Compliant mechanisms are mechanical mechanisms that rely on the elastic deformation of materials and, among other uses, have been widely applied in medical devices [
1,
2,
3], precision instruments [
4,
5,
6], sensors [
7,
8,
9], and microelectronic-mechanical systems (MEMS) [
10,
11]. Compliant mechanisms can be divided into centralized and distributed compliant mechanisms. The deformation of centralized compliant mechanisms is only concentrated at flexure hinges under small deformation. The compliance of the flexure hinges and the overall centralized compliant mechanism can be modelled based on the premise of linear deformation [
12,
13,
14]. On the other hand, distributed compliant mechanisms are based on the deformation of the entire structure or most of it. In the same design space, the stroke of the distributed compliant mechanism is larger than that of the centralized one; thus, distributed compliant mechanisms have been widely used in precision machinery and precision instruments [
15,
16,
17]. An accurate compliance model is the basis for the structural design of such mechanisms. When large deformation occurs in a distributed compliant mechanism, there is geometric nonlinearity in the flexure leaf spring (FLS). To this end, it is important to investigate and develop a nonlinear compliance model with high accuracy able to simulate the large deformation of FLS.
Initially, nonlinear compliance models concerned FLSs with 2D planar deformation. The methods used include the beam constraint method [
18], chain model method [
19], elliptic integral method [
20], and pseudo-rigid-body method [
21,
22]. The beam constraint method is derived from the basic equation in the elastic mechanics theory and its accuracy is high when the deformation range of the FLS is small, i.e., less than 0.1 times the length. For example, Radgolchin et al. [
23] proposed a nonlinear static model with an intermediate semi-rigid element of load–displacement relationships of flexure modules based on FLSs. However, the beam constraint method cannot be applied in cases of large deformation. In the chain model method, accurate models of units with small and precise deformations are assembled and analyzed. Chen et al. [
24] proposed a version of the chain method to model large planar deflections of initially curved beams. This method can be easily adapted to FLSs of various shapes. The elliptic integral method can provide high precision for large deformations. Wang et al. [
25] proposed a new design of a flexure-based XY precision positioning stage and analyzed its characteristics using the elliptic integral method. Finally, the pseudo-rigid-body method is an efficient and easy-to-understand analysis method. In this method, the deformation and stiffness of the FLS with large deformation is simulated through connected rigid rods and torsion springs at the connections. For instance, based on the pseudo-rigid-body model, Yu et al. [
26] proposed a new model with three degrees-of-freedom (DOFs) for FLSs with large deflection.
The 2D nonlinear compliance models of FLS are only suitable for planar distributed compliant mechanisms. Therefore, 3D compliance models are needed for the modelling of spatial multi-DOF distributed compliant mechanism. Irschik et al. [
27] proposed a continuum mechanics-based interpretation of Reissner’s structural mechanics model, where a proper continuum mechanics-based meaning is attached to both the generalized static entities and strains in Reissner’s theory. Sen et al. [
28] analyzed the constraint characteristics of a uniform and symmetric cross-sectioned, slender, spatial beam, which can used in 3D compliant mechanisms. Brouwer et al. [
29] presented refined analytic equations for the stiffness in three dimensions taking into account the shear compliance, constrained warping, and limited parallel external drive stiffness. Nijenhuis et al. [
30] presented a modeling approach for obtaining insight into the deformation and stiffness characteristics of general 3D flexure strips that undergo bending, shear, and torsion deformation. Bai et al. [
31,
32,
33] proposed load–displacement relationships for rectangular and large-aspect-ratio beams by solving their nonlinear governing differential equations using the power series method.
Highly deformable FLSs with low stiffness along the working direction and high stiffness in the non-working directions have been widely used, e.g., in large-stroke compliant linear guiding mechanisms. In general, the width-to-length ratio (w/L) of this type of FLSs is large. Current 3D compliance models all can be used in FLSs with small width-to-length ratio and thickness-to-length ratio. When establishing a compliance model for this type of FLS, the constraint model based on Euler–Bernoulli beam theory and the spatial coordinate system conversion relationship are used to construct a differential equation system without considering shear deformation. Therefore, current 3D compliance models cannot be used to accurately predict the compliance of such FLSs. To this end, this paper proposes a spatial compliance model for FLSs with large w/L. In this model, the shear deformation along the width direction is characterized based on the Timoshenko beam theory and a new differential equation system is established by combining the spatial coordinate transformation relations. The shear deformation along the width direction of the FLS with large w/L and the spatial geometric nonlinearity under large deformation can be accurately described by this model. Furthermore, an experimental platform is set to verify the accuracy of the proposed compliance model.
The rest of the paper is organized as follows. In
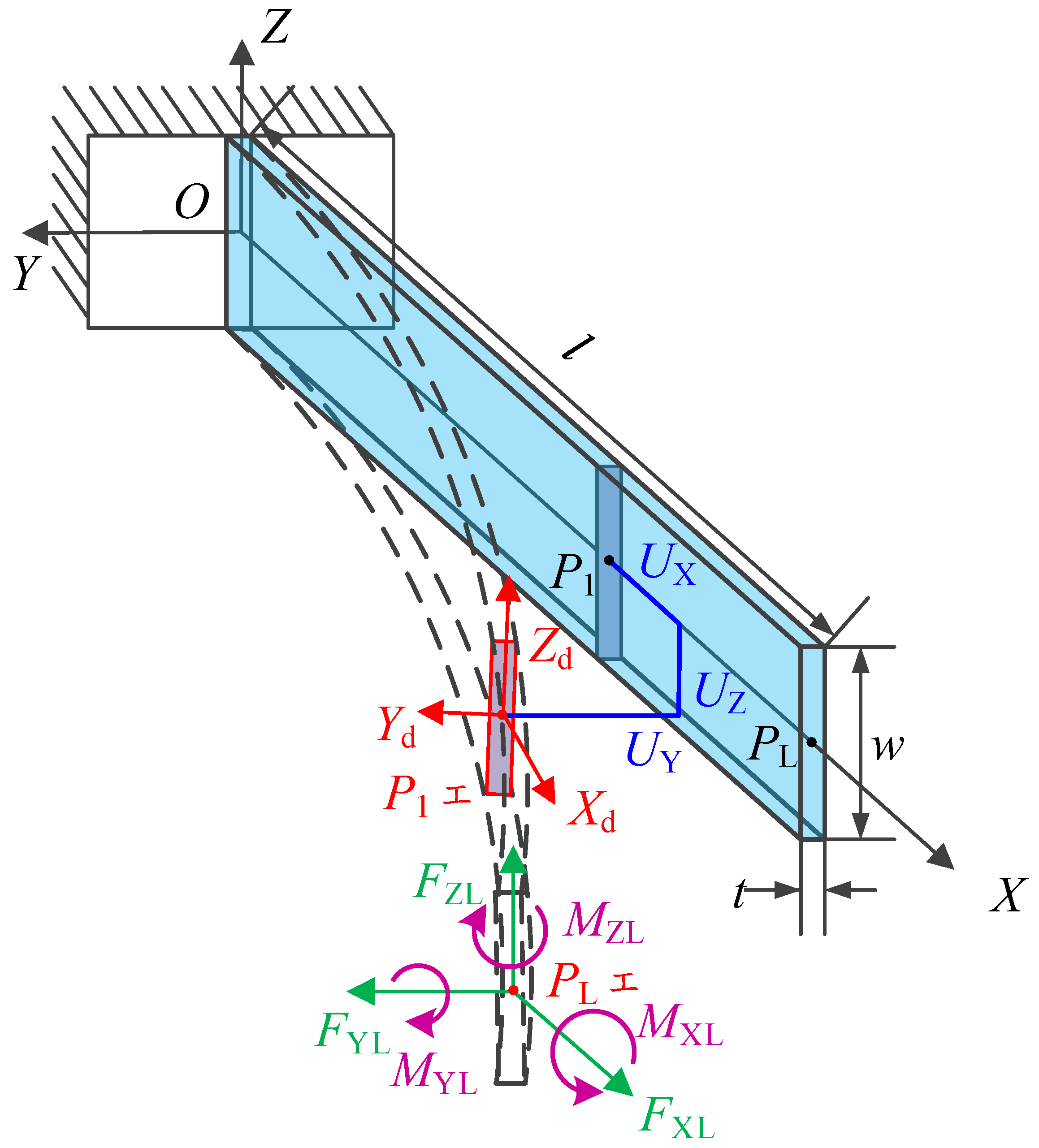
Section 2, a compliance model of the FLS with a small deformation (<0.1
L) is established based on the spatial constraint model and the relationship between deformation and load is derived. In
Section 3, a spatial chain model is established. In particular, a spatial six-DOF compliance model of the FLS is obtained by connecting FLSs with small deformation based on the coordinate transformation method. In
Section 4, the effects of the structural parameters on FLS compliance and compliance ratio are analyzed. In
Section 5, an experimental platform is built to verify the accuracy of the model proposed in this paper.
3. Chain Model of the Spatial FLS
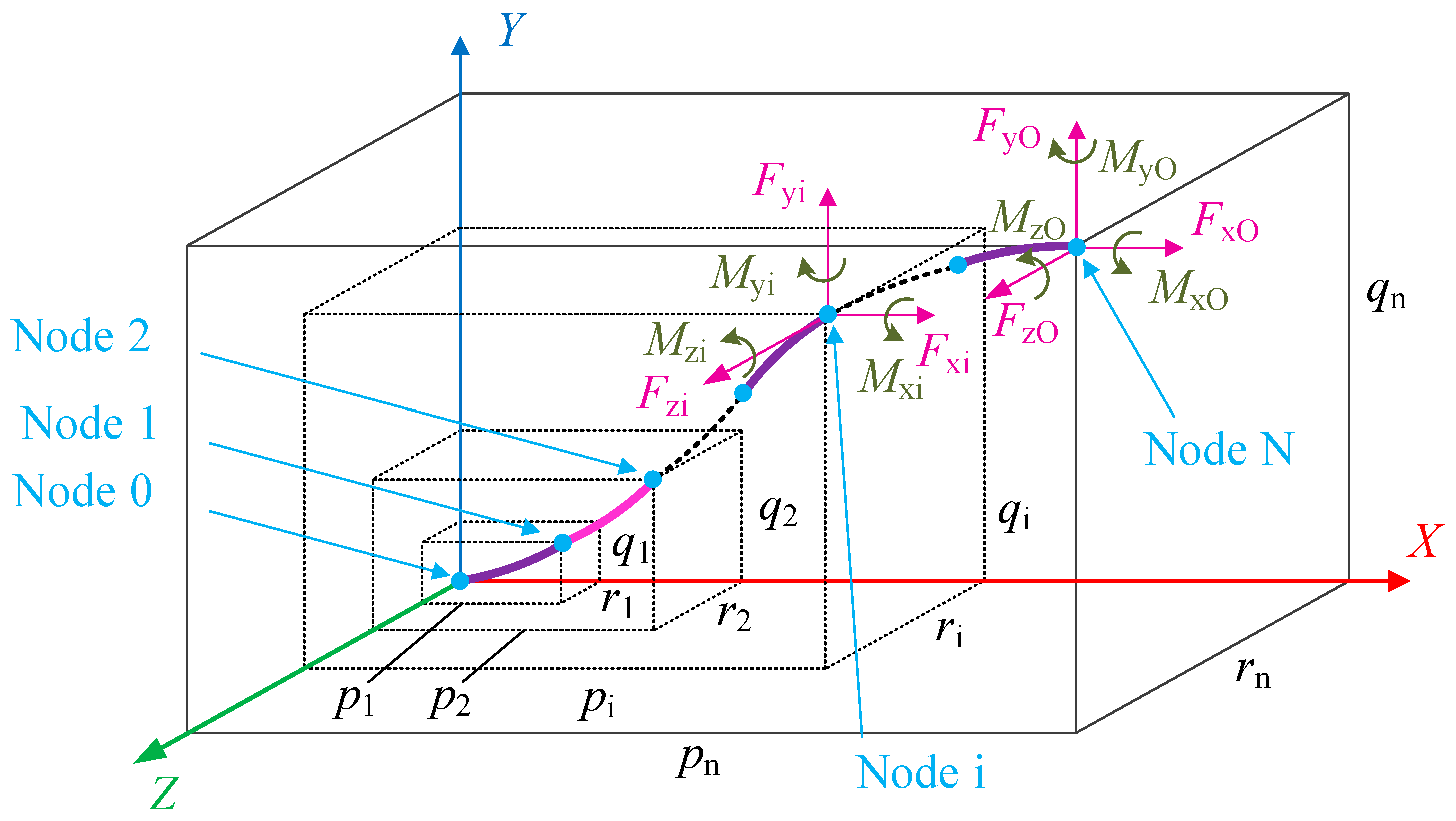
The chain model of a spatial FLS with large deformation is illustrated in
Figure 3. The forces and torques loaded on the end of the FLS are
FxO,
FyO,
FzO and
MxO,
MyO,
MzO, respectively, while the displacement and rotation angles of the FLS end are
pN,
qN,
rN and
θxdN,
θyN,
θzN, respectively. Subsequently, the FLS is divided into several flexure elements with equal length
Li. Every flexure element has two endpoints and is modeled with the six-DOF compliance model introduced in
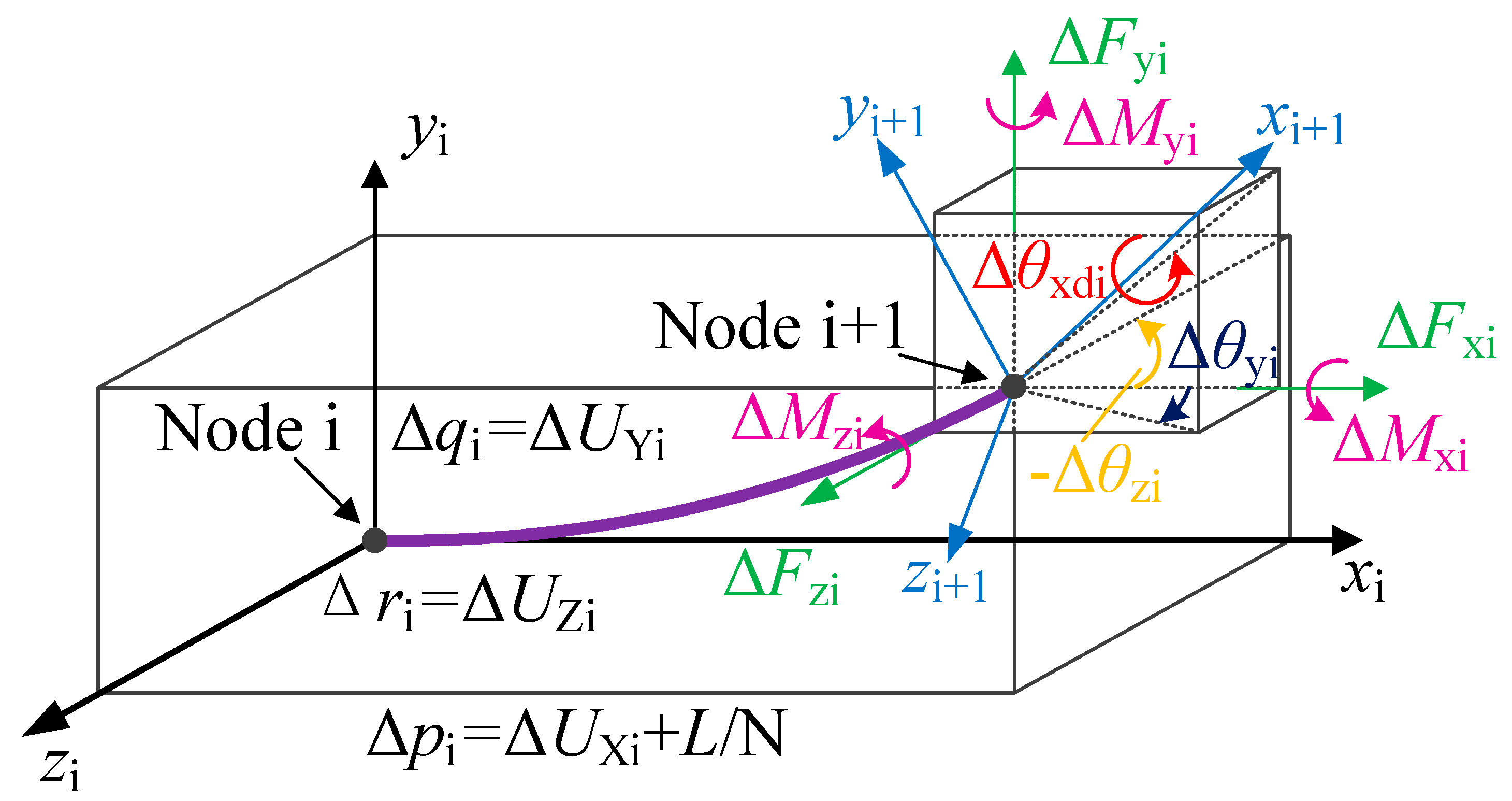
Section 2. The load and deformation are defined in
Figure 4. It is assumed that the FLS is divided into N flexure elements. The local coordinate system
xi-
yi-
zi is established at the endpoint (node i) of the element i and along its tangent direction. The local coordinate system of the first element is established at the fixed end of the FLS (node 0).
The free end of the FLS is defined as node N. The forces and torques loaded on the i-th flexure element are Δ
Fxi, Δ
Fyi, Δ
Fzi and Δ
Mxi, Δ
Myi, Δ
Mzi, respectively, while the corresponding displacements and rotation angles are Δ
pi, Δ
qi, Δ
ri and Δ
θxdi, Δ
θyi, Δ
θzi, respectively. The transformation matrix between the coordinate system on the end of the i-th flexure element and that on the endpoint (node i) is given as Equation (27):
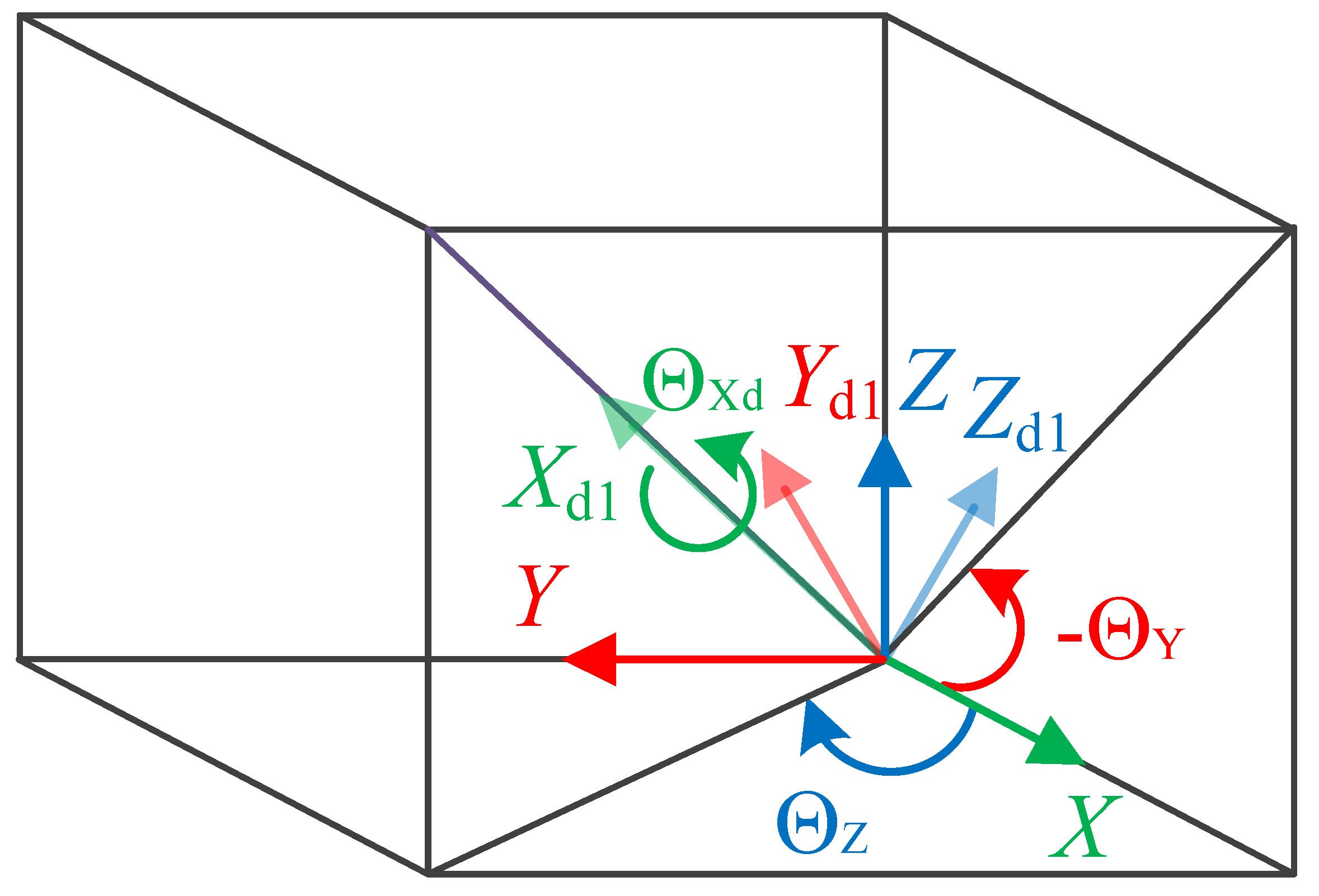
The transformation matrix between the local coordinate system
xi-
yi-
zi of the i-th element and the global coordinate system
X-
Y-
Z is as follows:
which can be defined as Equation (29):
The value of every angle can be calculated using the above transformation matrix, and the calculation process is given as Equation (30):
since
Equation (32) can be deduced:
By further transforming Equations (32) and (33) can be derived as follows:
The total displacement of node i in the chain model can be expressed as follows:
where
The loads applied on node i are:
The transformation relationship between the loads in the local coordinate system
xi-
yi-
zi and those in the global coordinate system
X-
Y-
Z is:
Furthermore, the relationship between the forces exerted on adjacent nodes is:
The chain model of the spatial FLS can be obtained by combining the equation systems of every flexure element and using the six-DOF compliance model introduced in
Section 2 to model every flexure element. Subsequently, a relationship between loads (
FxO,
FyO, and
FzO), torques (
MxO,
MyO, and
MzO), displacements (
pN,
qN, and
rN), and rotation angles (
θxdN,
θyN, and
θzN) can be obtained. Due to the complexity of the equation system, Newton’s method is used to solve it. The calculation results (
pN,
qN,
rN and
θxdN,
θyN,
θzN) gradually approach a fixed value with an increasing number of flexure elements n. Consequently, the chain model can be considered as convergent.
5. Theoretical Model Verification
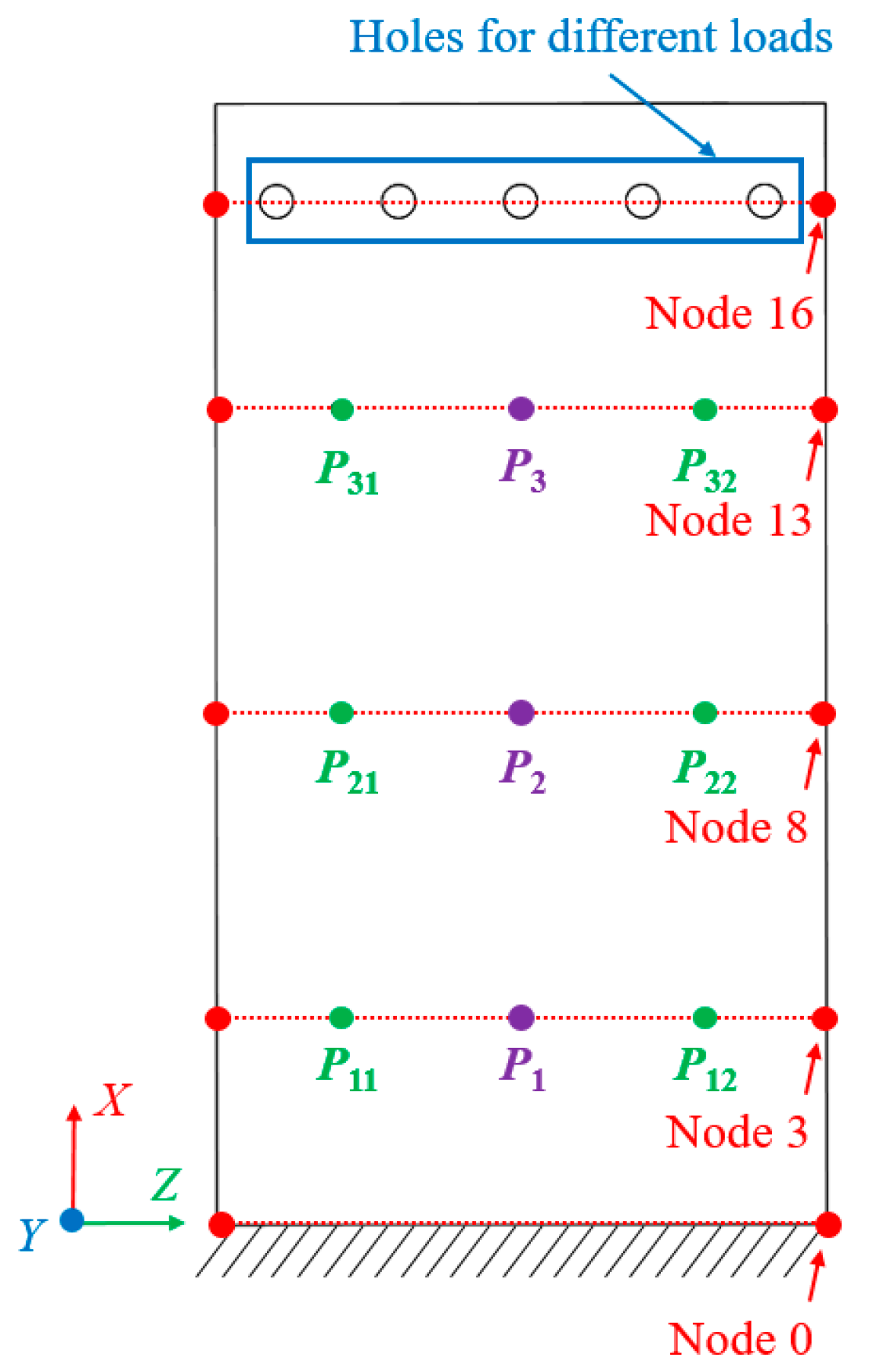
In this paper, the compliance model of the spatial large deformation FLS is verified both experimentally and through finite element simulations. The structure of the FLS, the nodes of the chain model, and the positions of the applied load are depicted in
Figure 12. The structural parameters of the FLS are given in
Table 2. The chain model described in
Section 3 was used to discretize the FLS. More specifically, the FLS was divided into 18 flexure elements; the length of each element was 10 mm. The holes for applying different loads to the FLS were placed on the boundary where node 16 was located. The distance between adjacent holes was 20 mm. In both the simulation and experiment, the deformation and rotation angle of the midpoints (
P1,
P2,
P3) on the discrete boundary where nodes 3, 8, and 13 are located were compared with the calculation results obtained by the theoretical model. In order to analyze the rotation angle of the FLS in the simulation and experimental results, the deformations of the points (
P11,
P12,
P21,
P22,
P31,
P32) on the boundary line on the FLS where nodes 3, 8, and 13 are located were extracted. The distance between the different points is given in
Table 3. The coordinates of the points when the FLS was not deformed are listed in
Table 4. The coordinates of each point on the FLS after deformation are listed in
Table 5 and are expressed based on the chain model introduced in
Section 3.
5.1. Finite Element Simulation
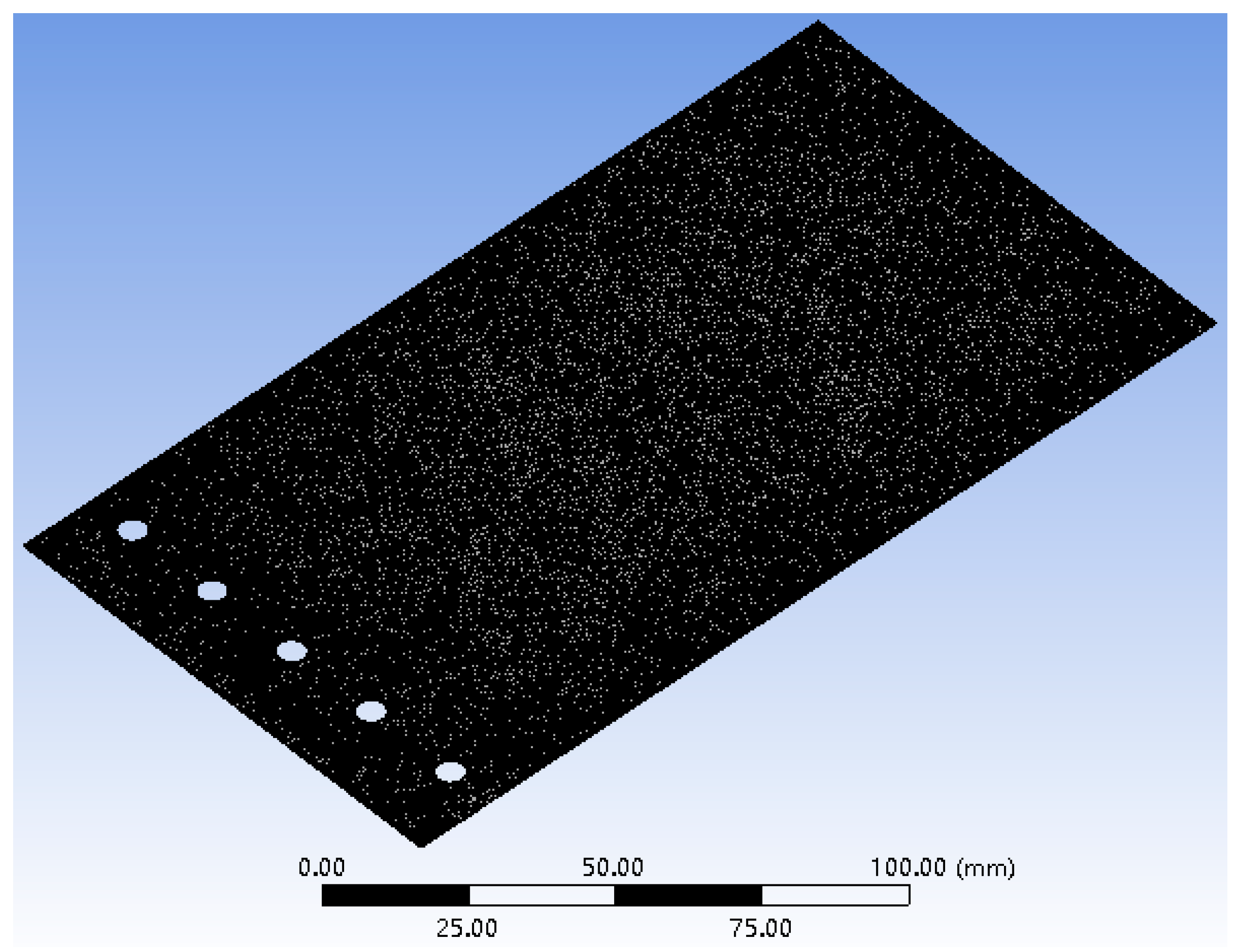
The mesh of the FLS model is depicted in
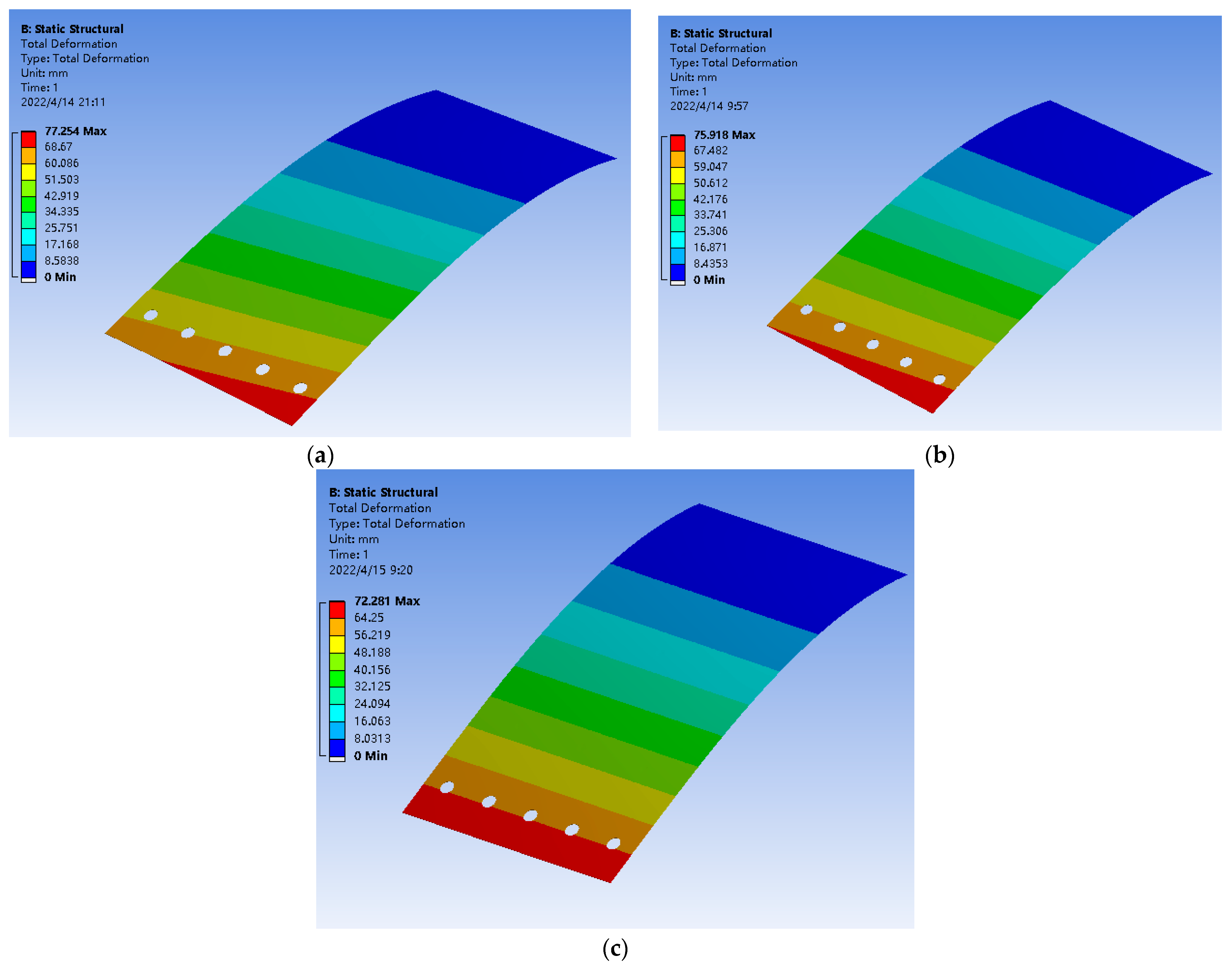
Figure 13. The model was meshed with tetrahedral elements, the number of nodes was 228,711 and the number of elements was 111,623. In this paper, the deformation of the FLS under loads applied at three different positions was simulated. The applied load was 1 N, and the application positions of the loads are given in
Table 6. The simulation results are demonstrated in
Figure 14, and the points
P11,
P12,
P21,
P22,
P31,
P32 were recorded from the simulation results. The displacement and rotation angle of each point (
P1,
P2,
P3) could be calculated based on the simulation results of points (
P11,
P12,
P21,
P22,
P31,
P32). The theoretical calculation and simulation results of points (
P1,
P2,
P3) are listed in
Table 7. It can be found that the error was smaller than 5%. This verifies that the theoretical model proposed in this paper is accurate.
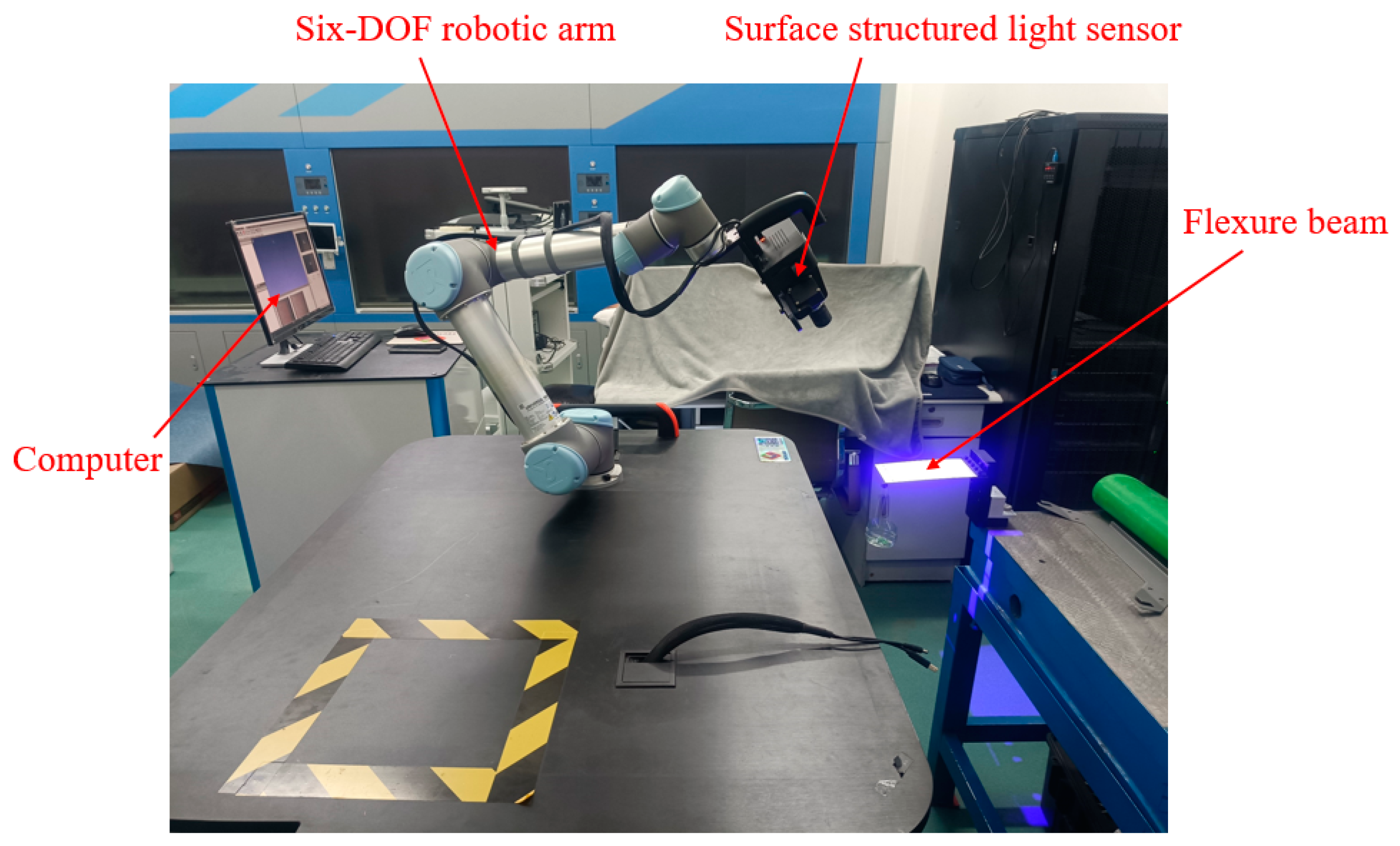
5.2. Experiment
The experimental platform used to test the FLS is depicted in
Figure 15. A 6-DOF manipulator (UNIVERSAL ROBOTS, UR5) carrying a surface structured light sensor (TECHLEGO, Q3; measurement accuracy of ±0.005 mm) was used to scan the deformed FLS and capture its spatial contours. The spatial change of the position of points (
P11,
P12,
P21,
P22,
P31,
P32) on the FLS after deformation was obtained by processing the spatial contour data. Subsequently, the deformation and rotation angle of points (
P1,
P2,
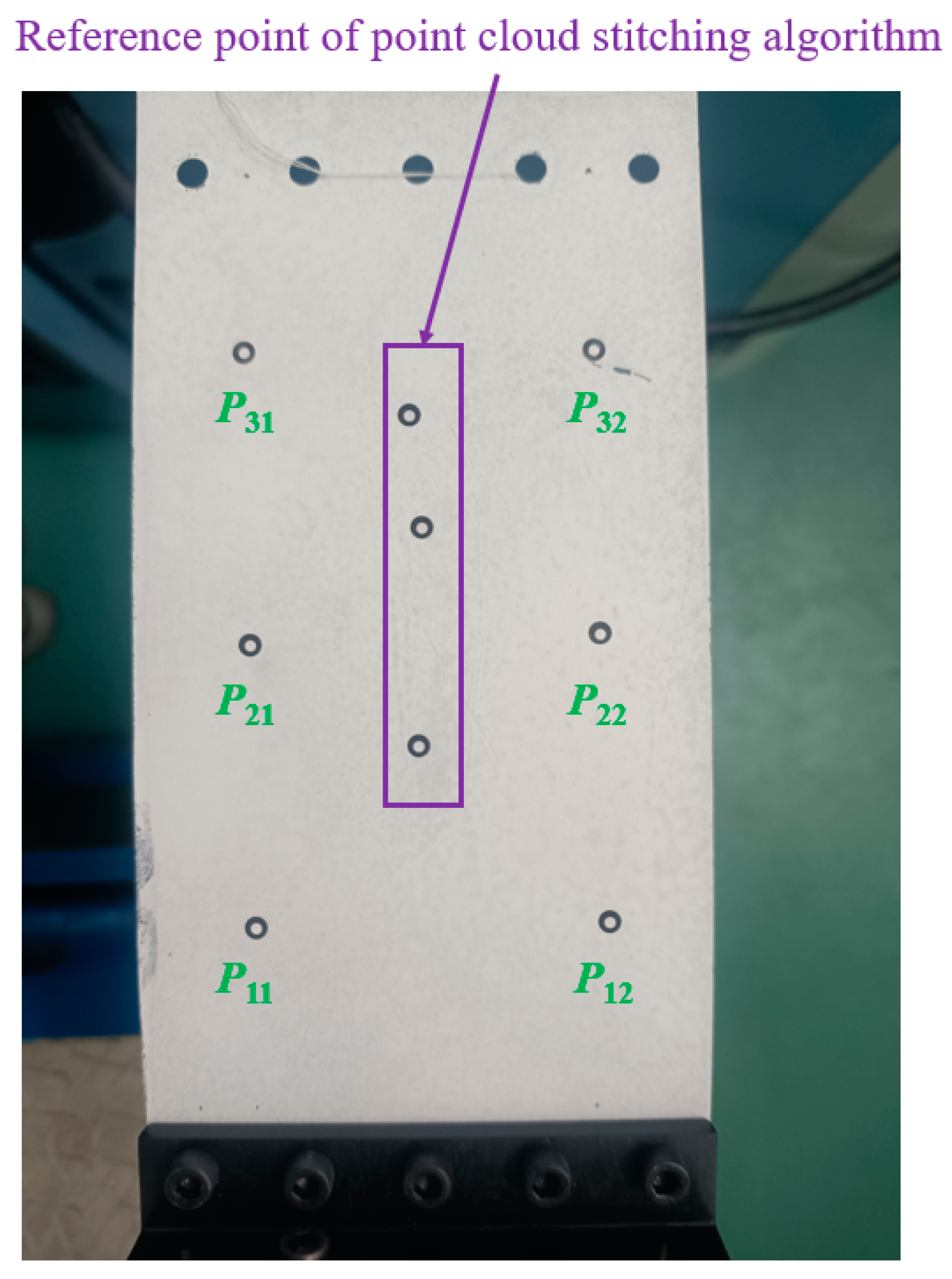
P3) on the FLS were calculated. The FLS used in the experiment is depicted in
Figure 16. The FLS was marked at points (
P11,
P12,
P21,
P22,
P31,
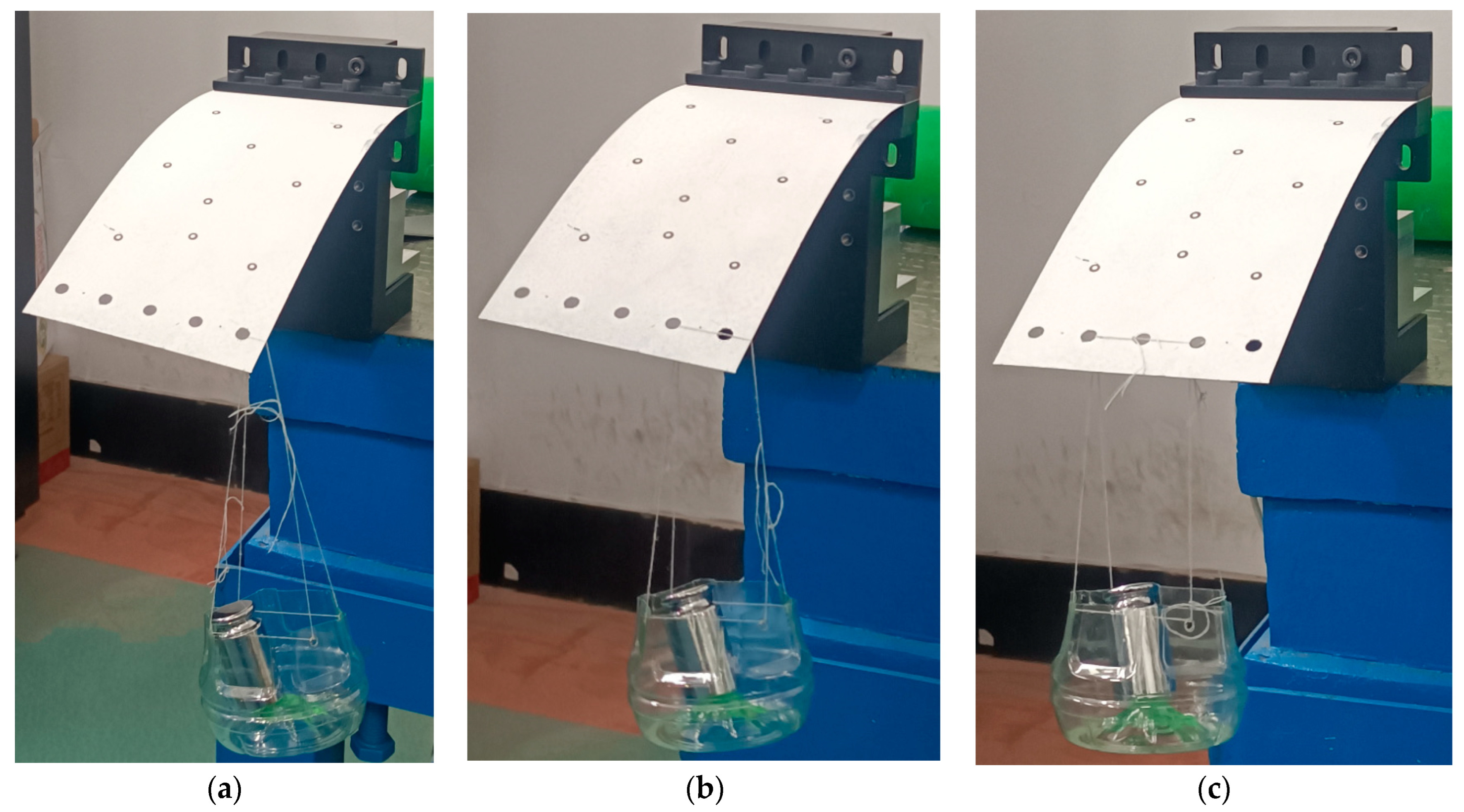
P32) in order to facilitate the subsequent data processing. Due to that the scanning area of the structured light sensor was small and could not fully cover the FLS, the FLS needed to be marked at reference points to implement the splicing algorithm of spatial contour. Then, the scanned contour data of the entire FLS could be obtained. The FLS deformed under load is displayed in
Figure 17. The load was
m = 100 g and the gravitational acceleration
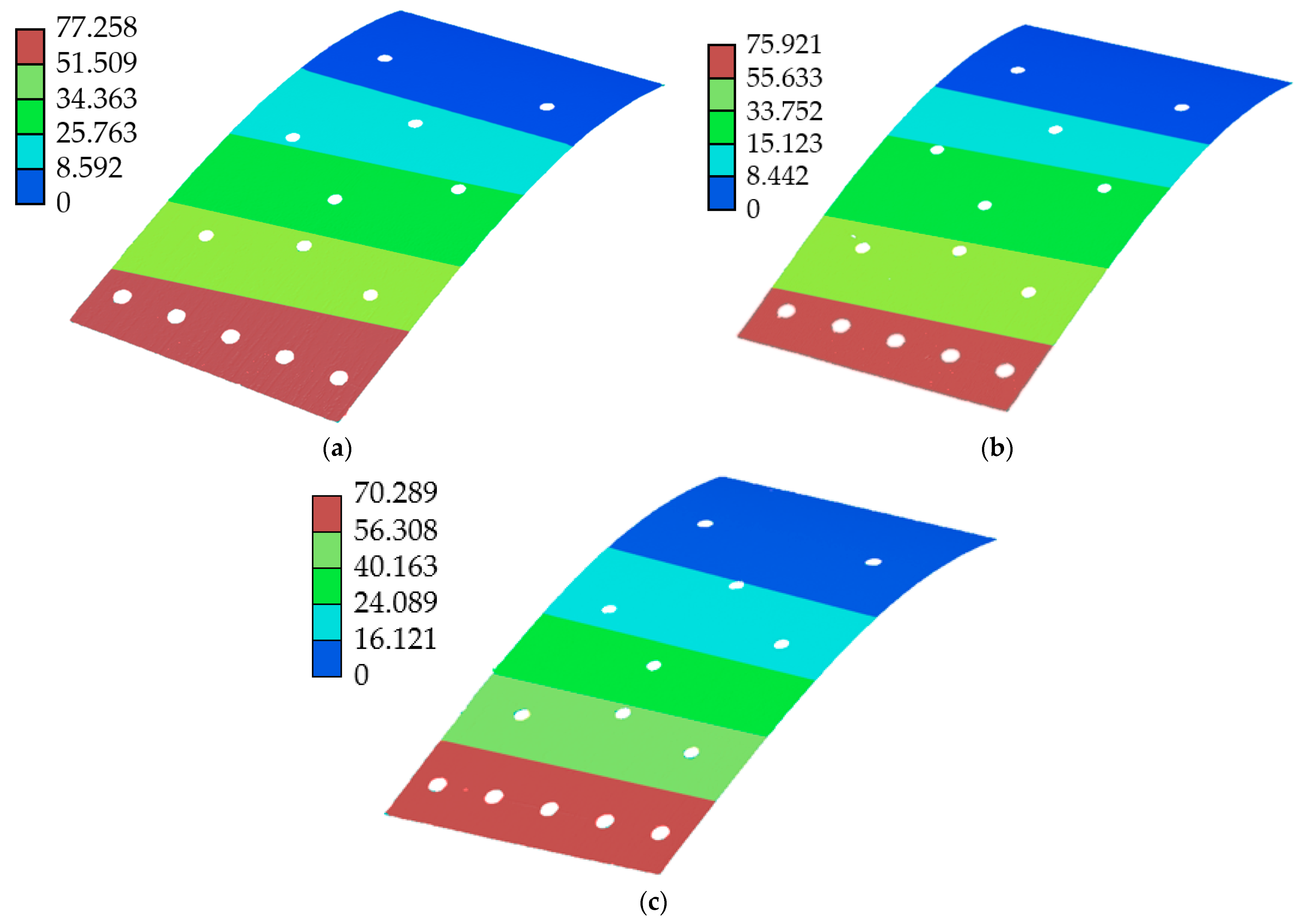
g = 9.8066 N/kg. The spatial contours of the deformed FLS are presented in
Figure 18. The experimental results of the points (
P1,
P2,
P3) were obtained after processing the spatial contour data and are listed in
Table 8. The error was smaller than 5%. Consequently, the accuracy of the theoretical model proposed in this paper was again verified.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


