
Finite Element Modeling and Test of Piezo Disk with Local Ring Electrodes for Micro Displacement


Abstract
:1. Introduction
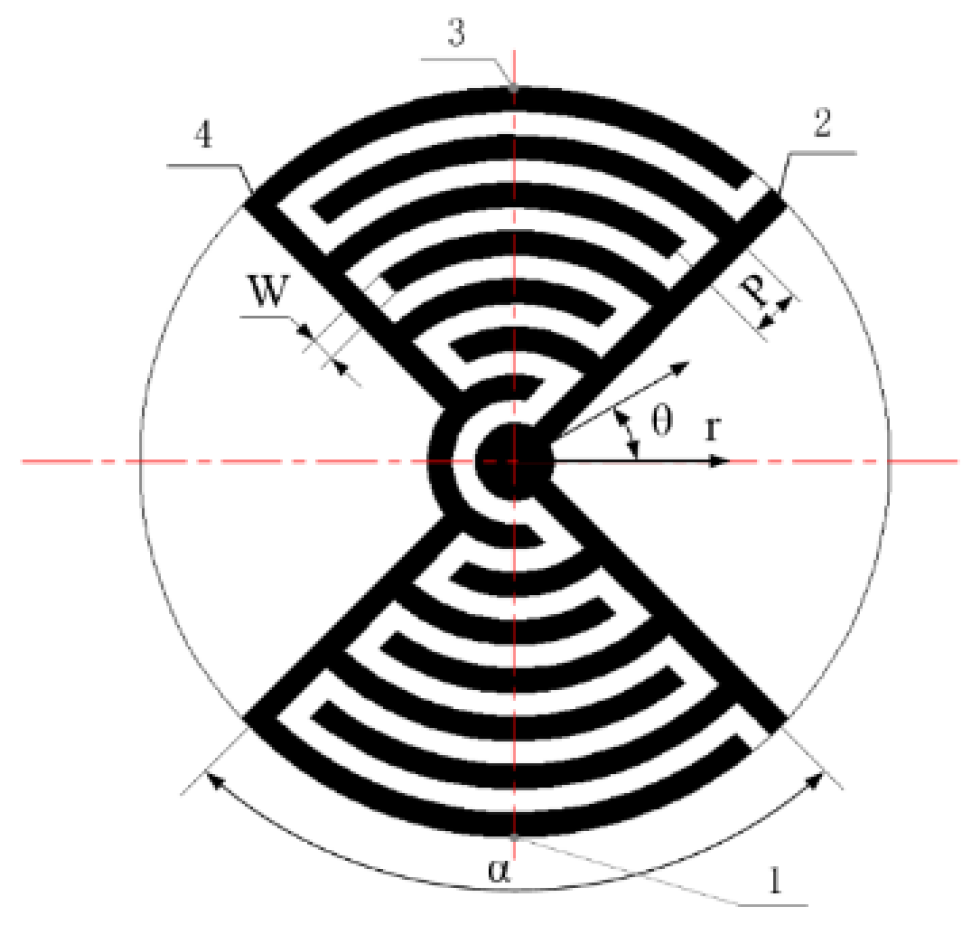
2. Structural Principle of Actuator
3. Finite Element Analysis
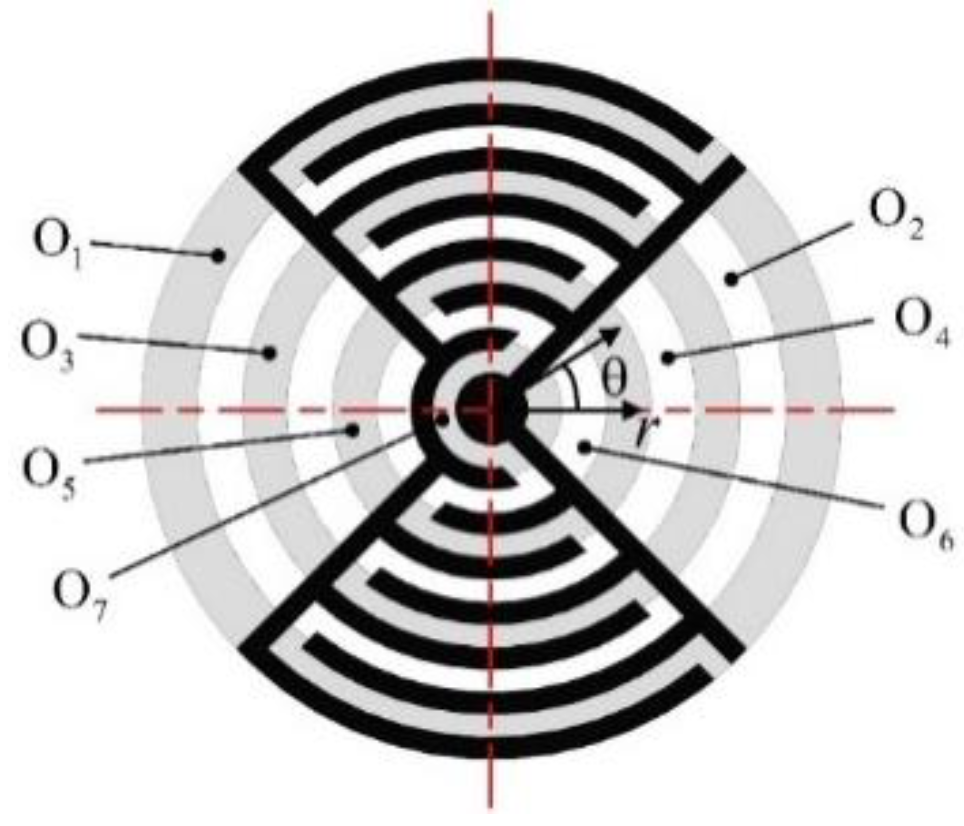
3.1. Piezo Ring Analysis
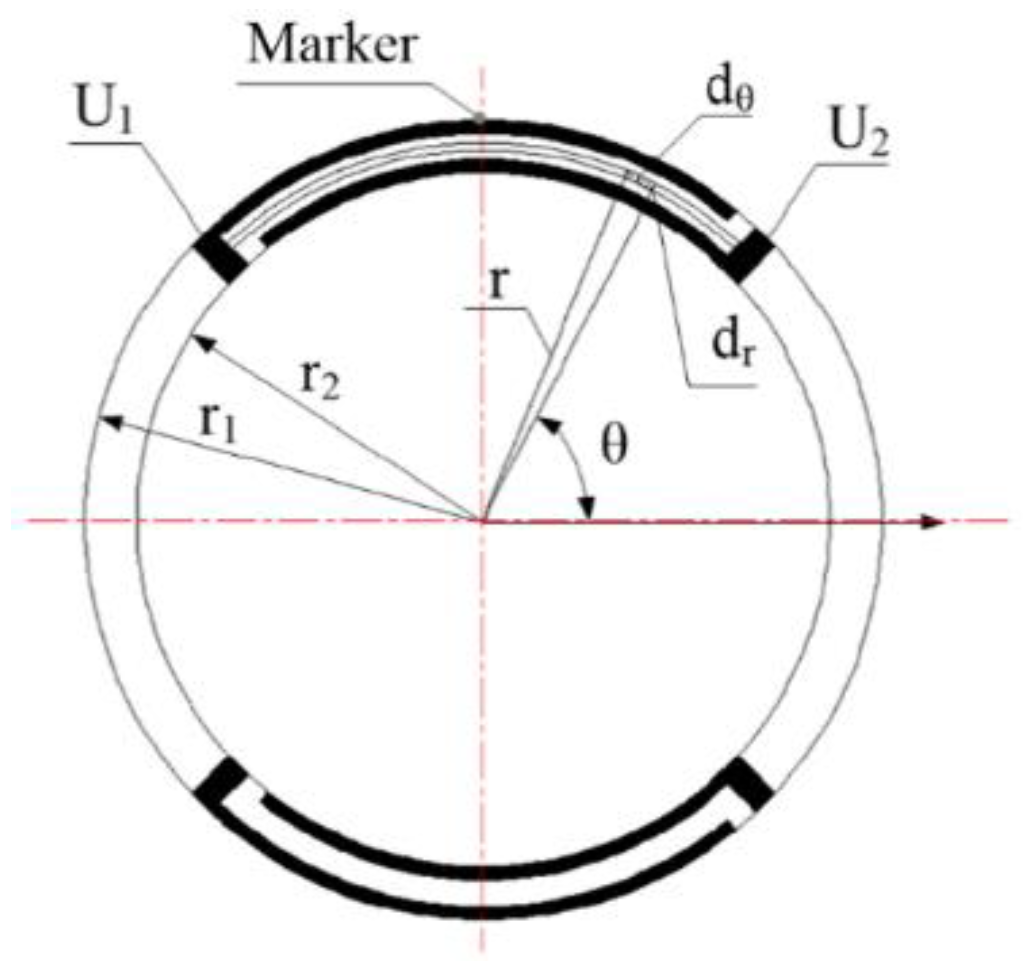
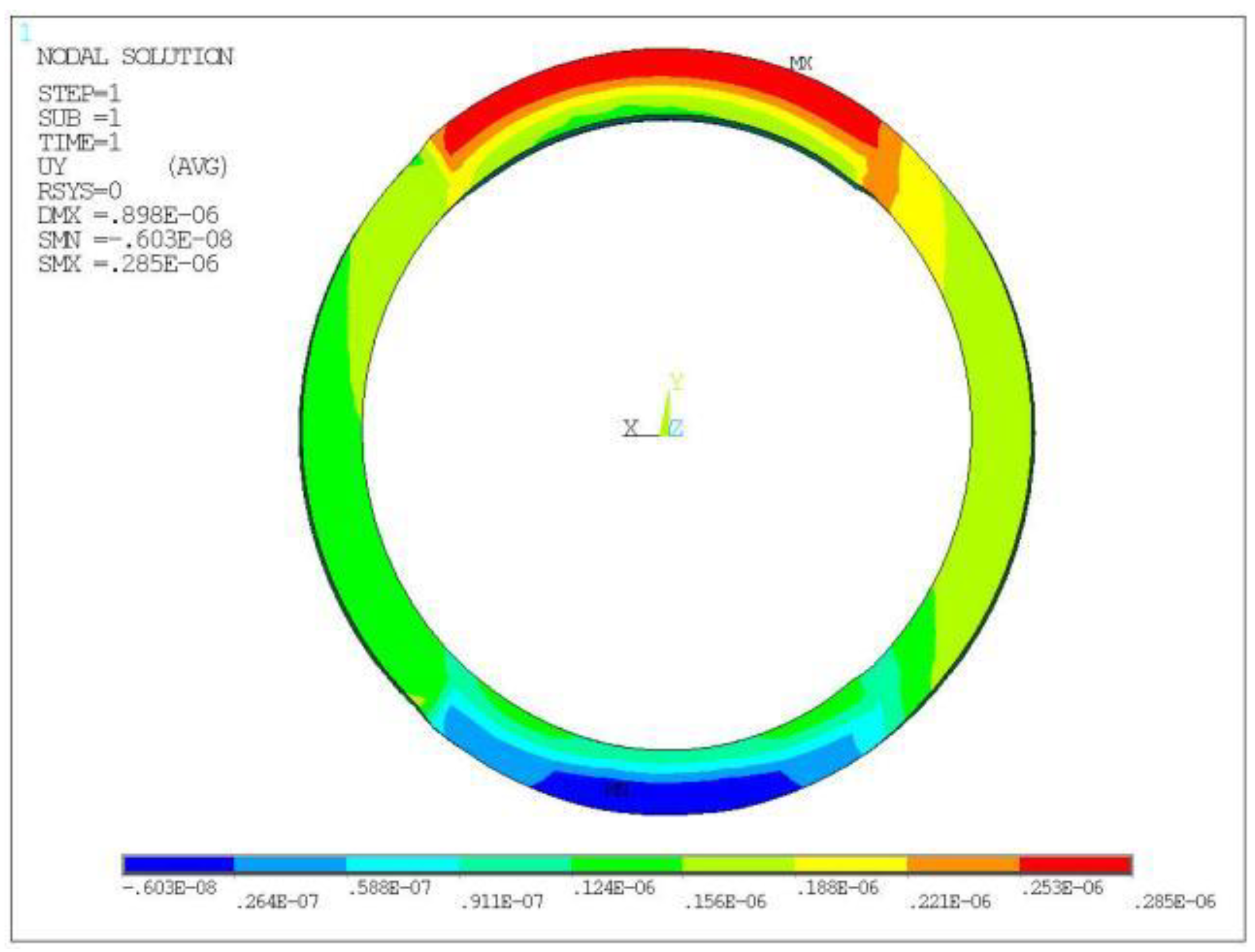
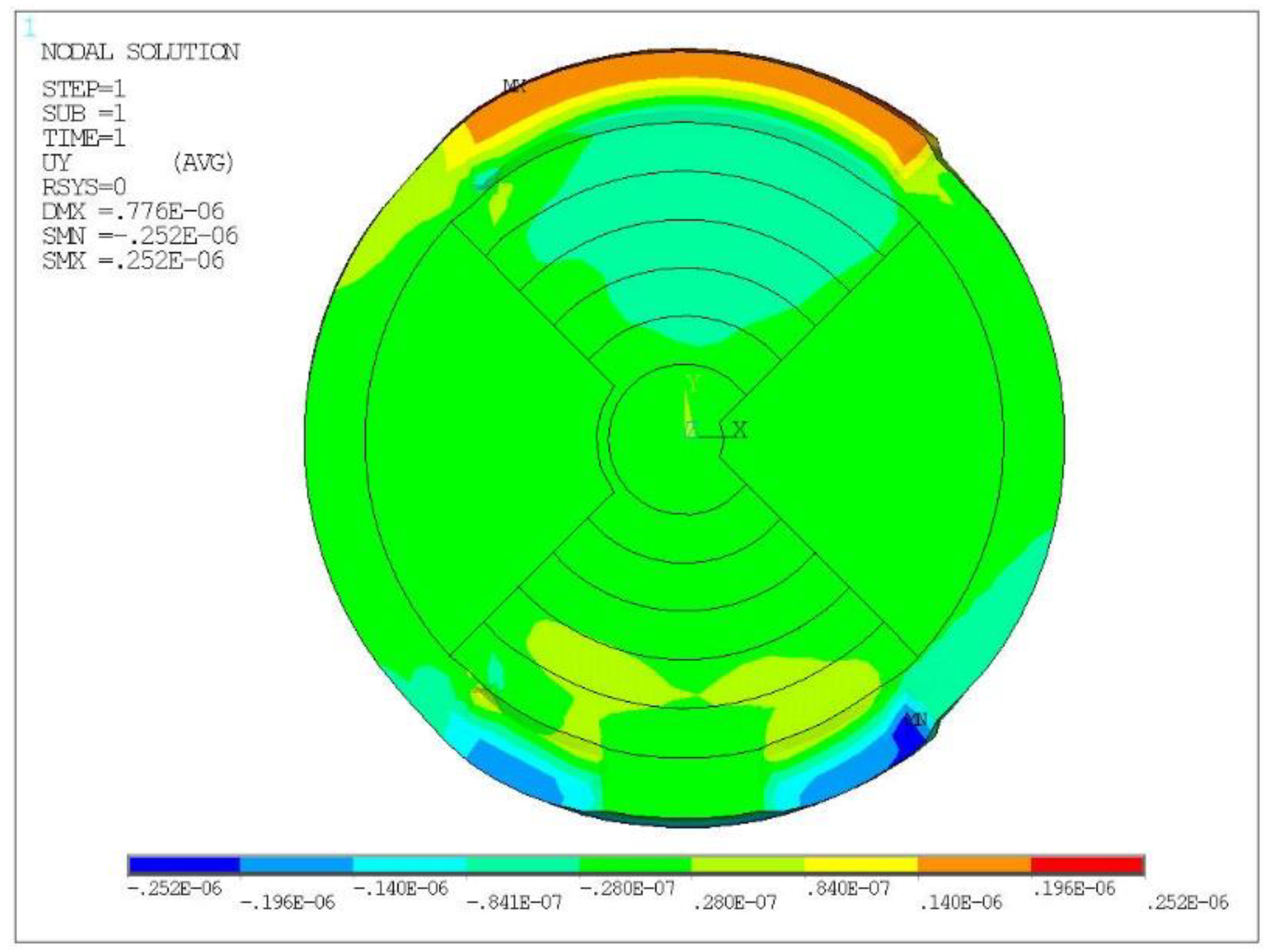
3.2. Single Electrode Ring Loading Analysis
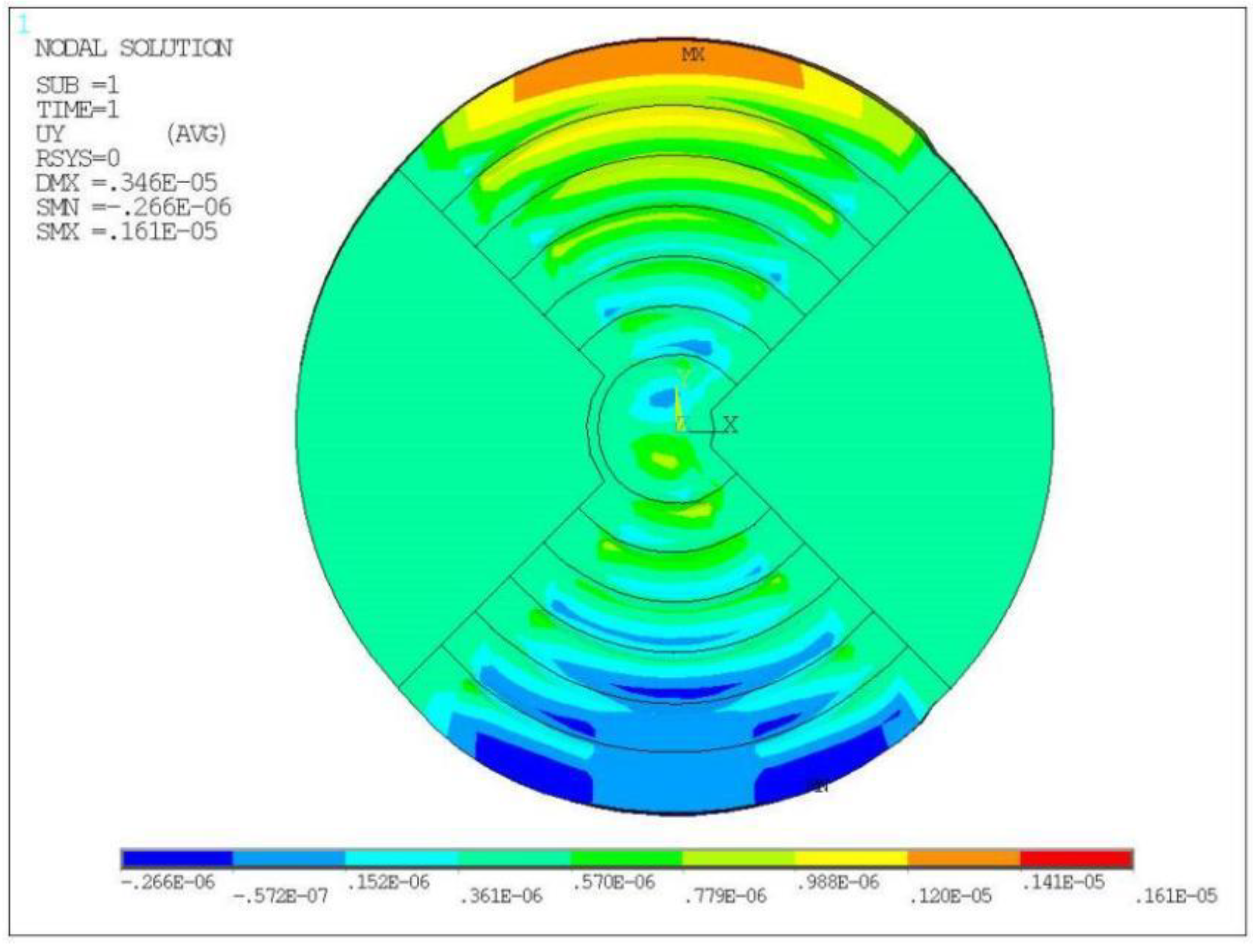
3.3. Full Electrode Loading Analysis
4. Displacement Test and Results Analysis
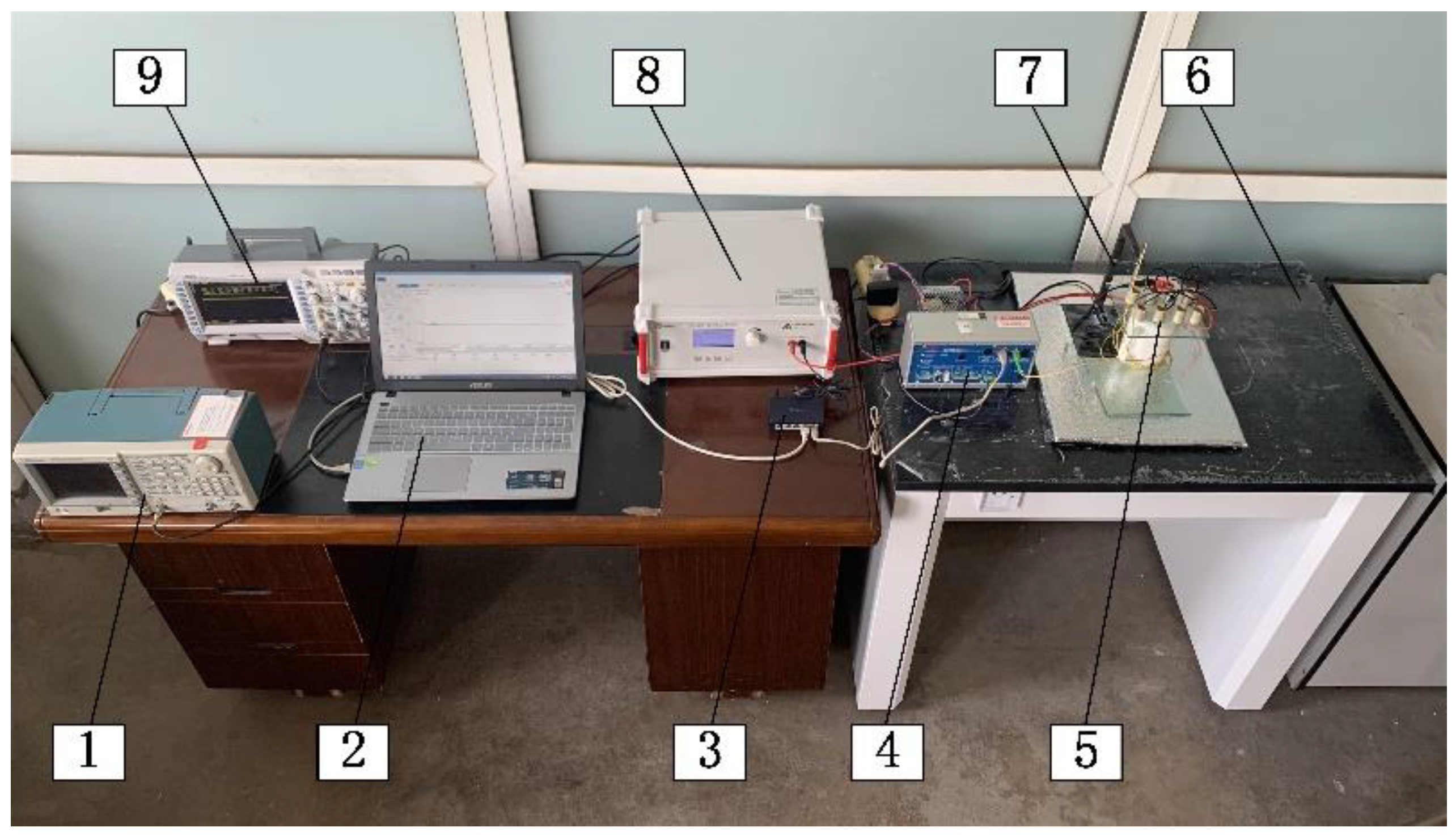
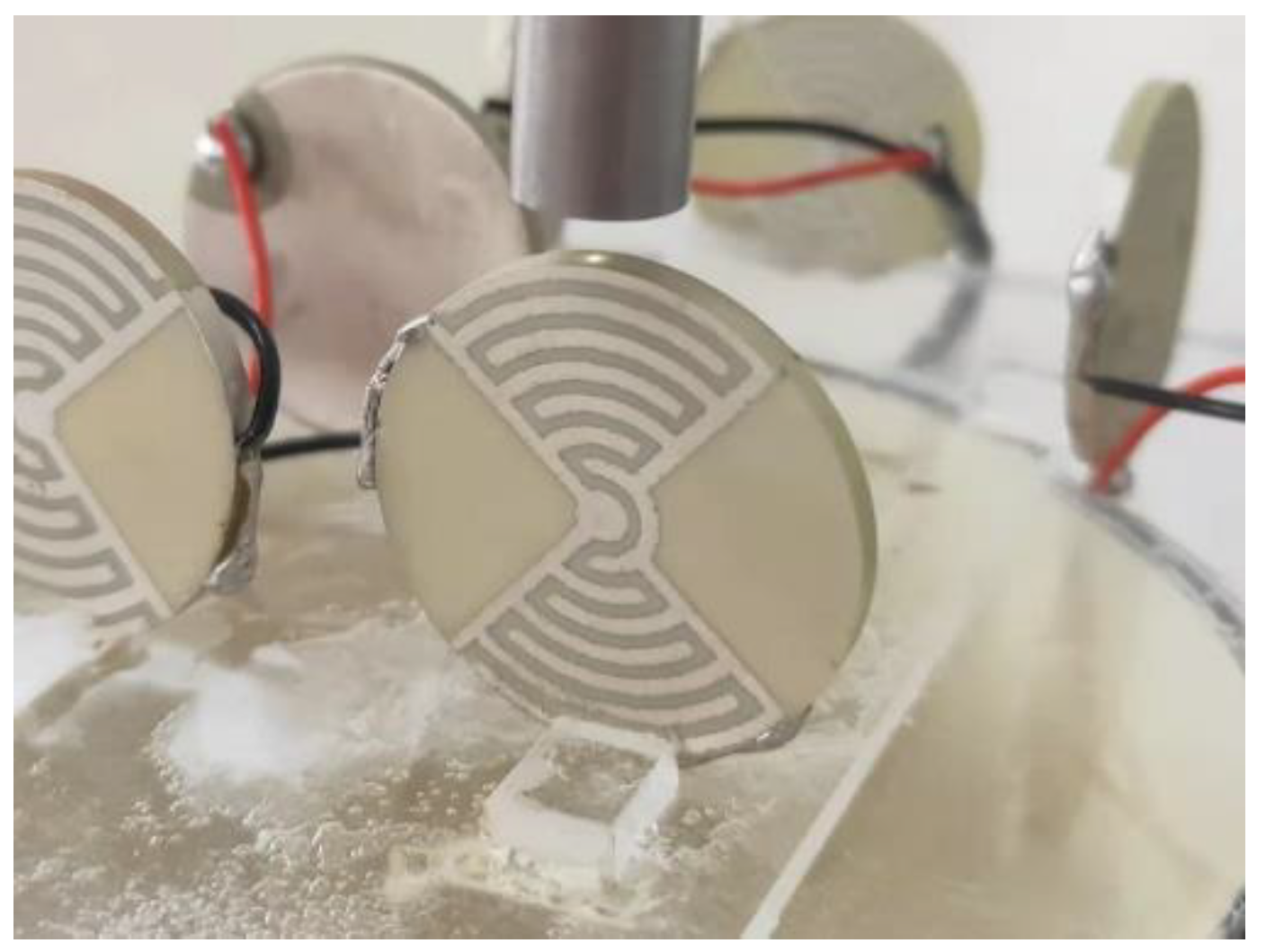
4.1. Experimental Device
4.2. Result Analysis
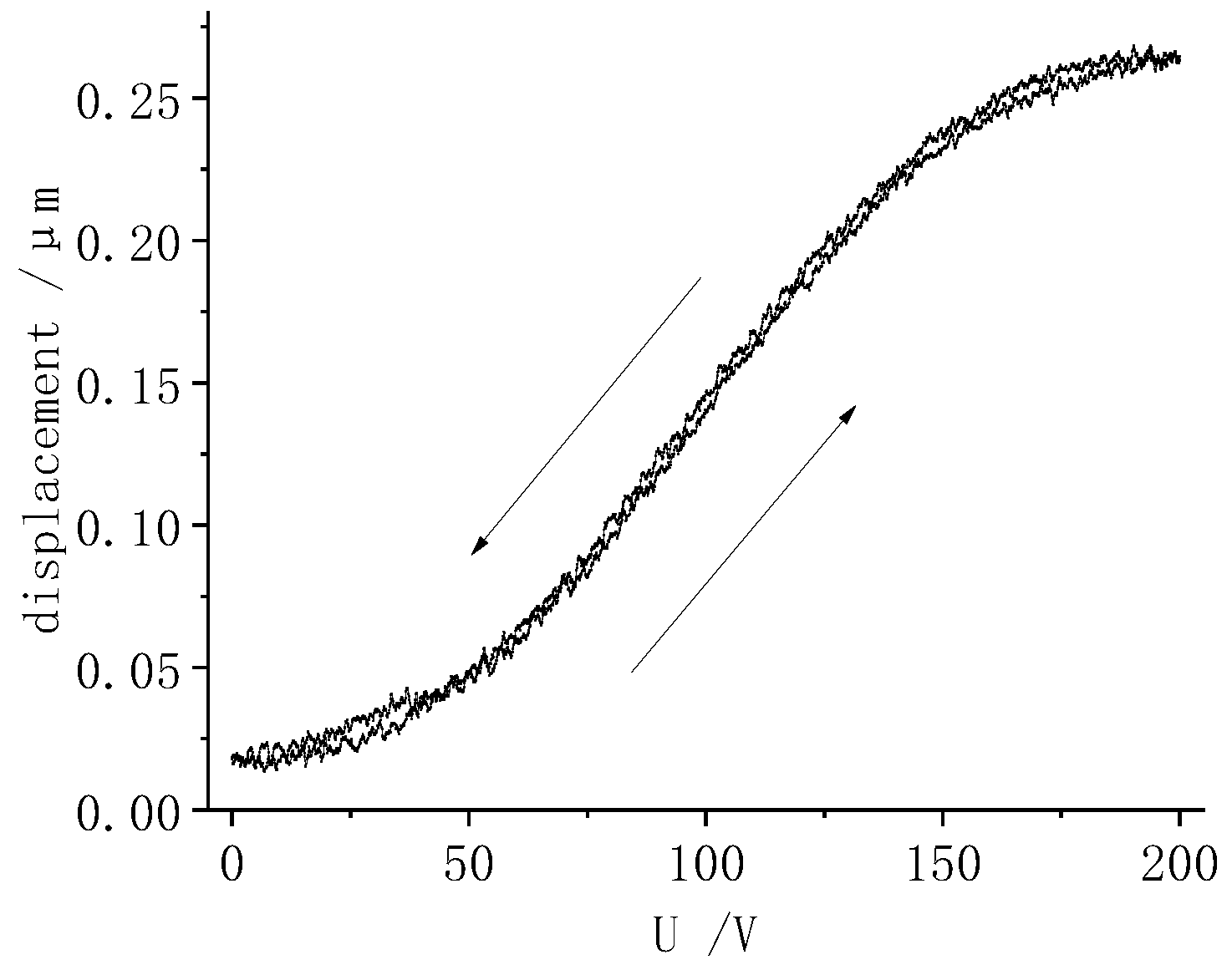
4.2.1. Displacement Response of Single Electrode Ring Excitation
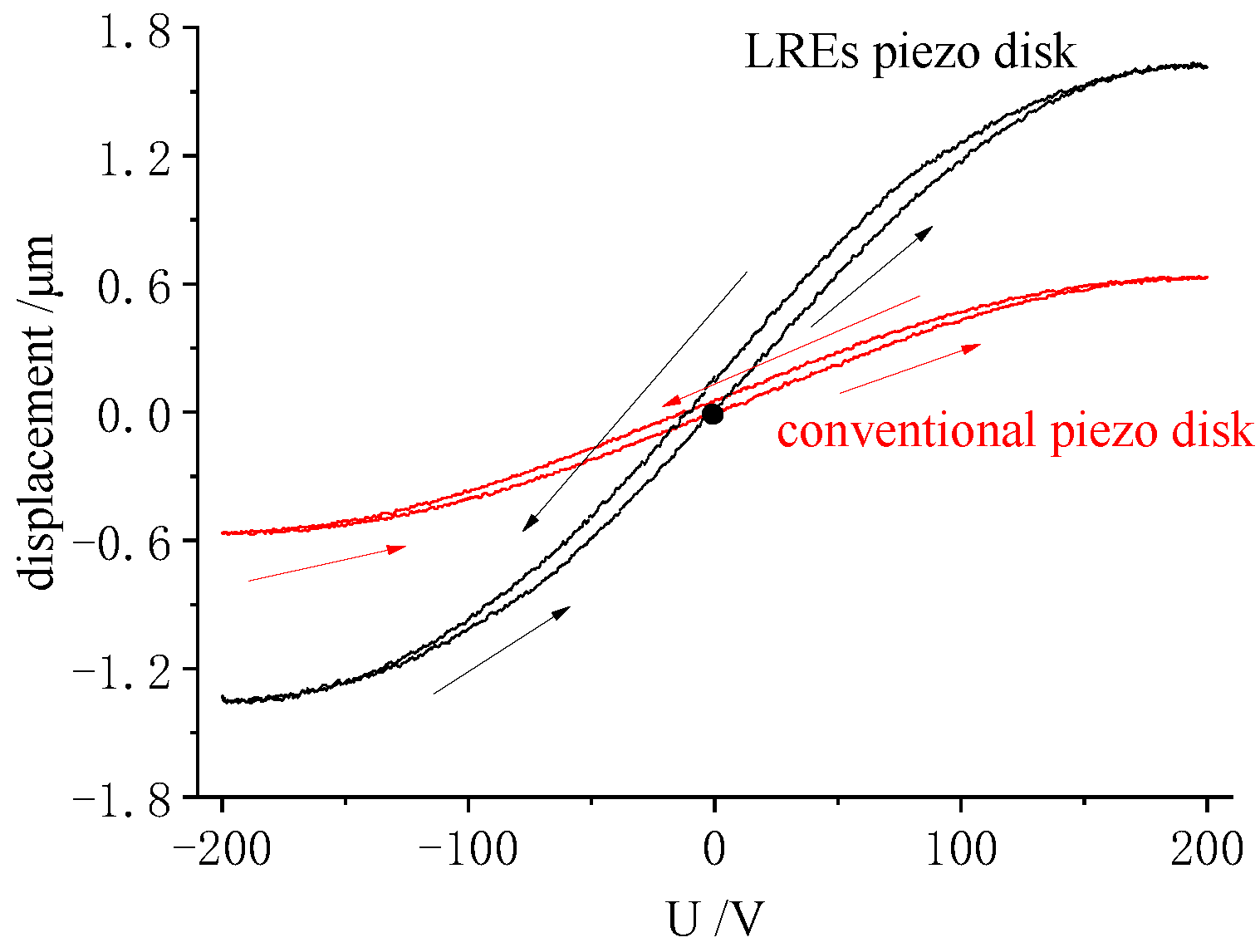
4.2.2. Micro Displacement Analysis
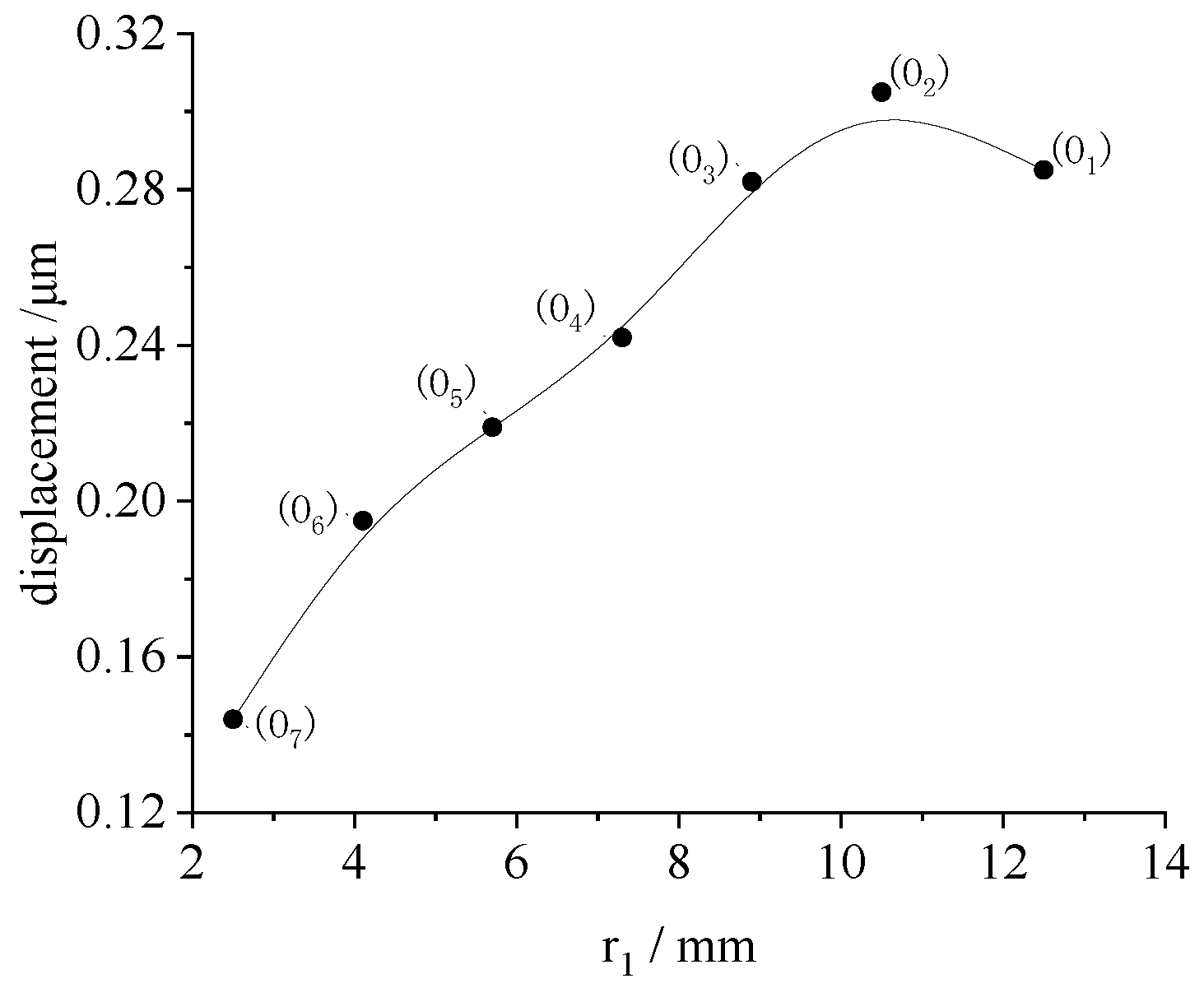
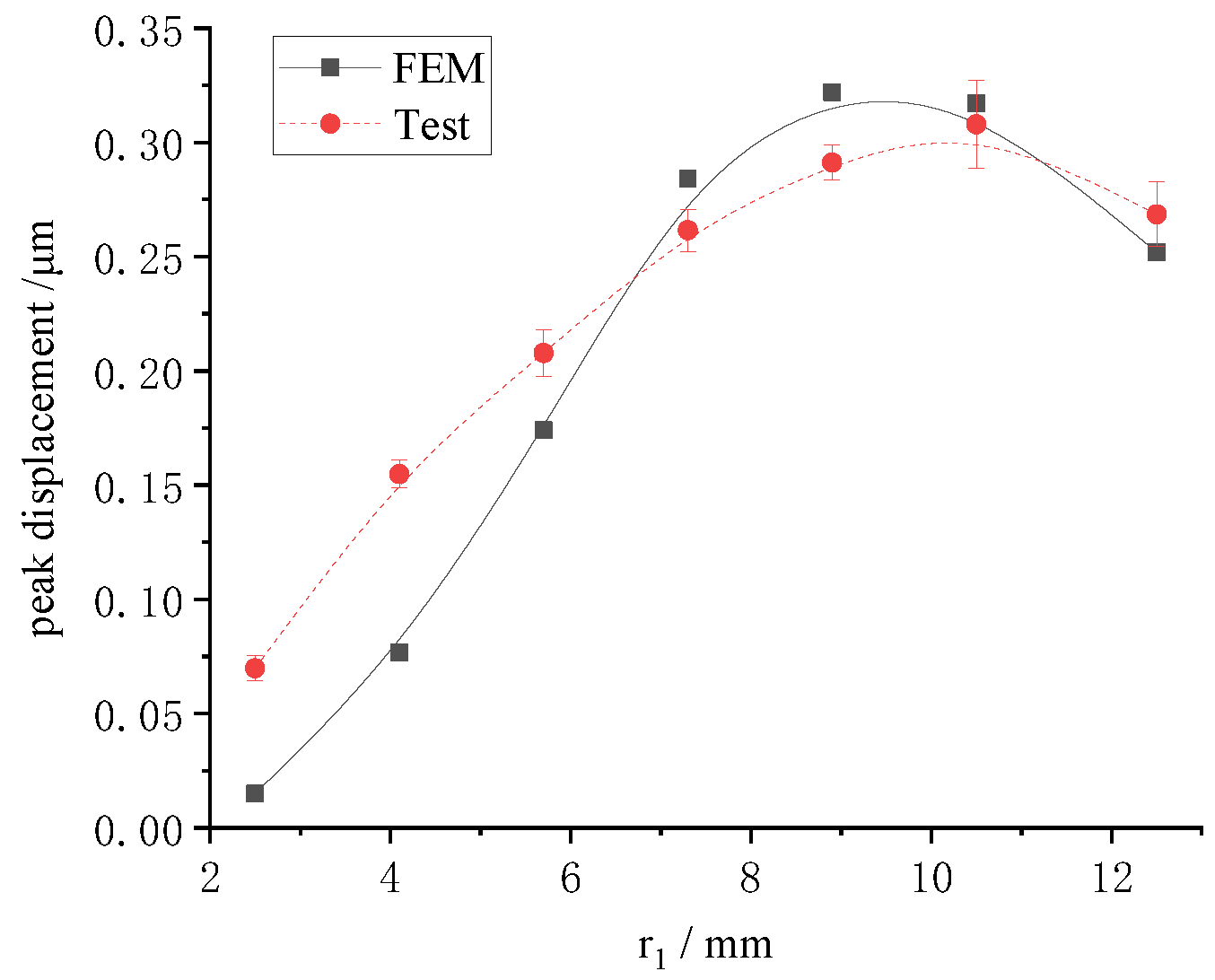
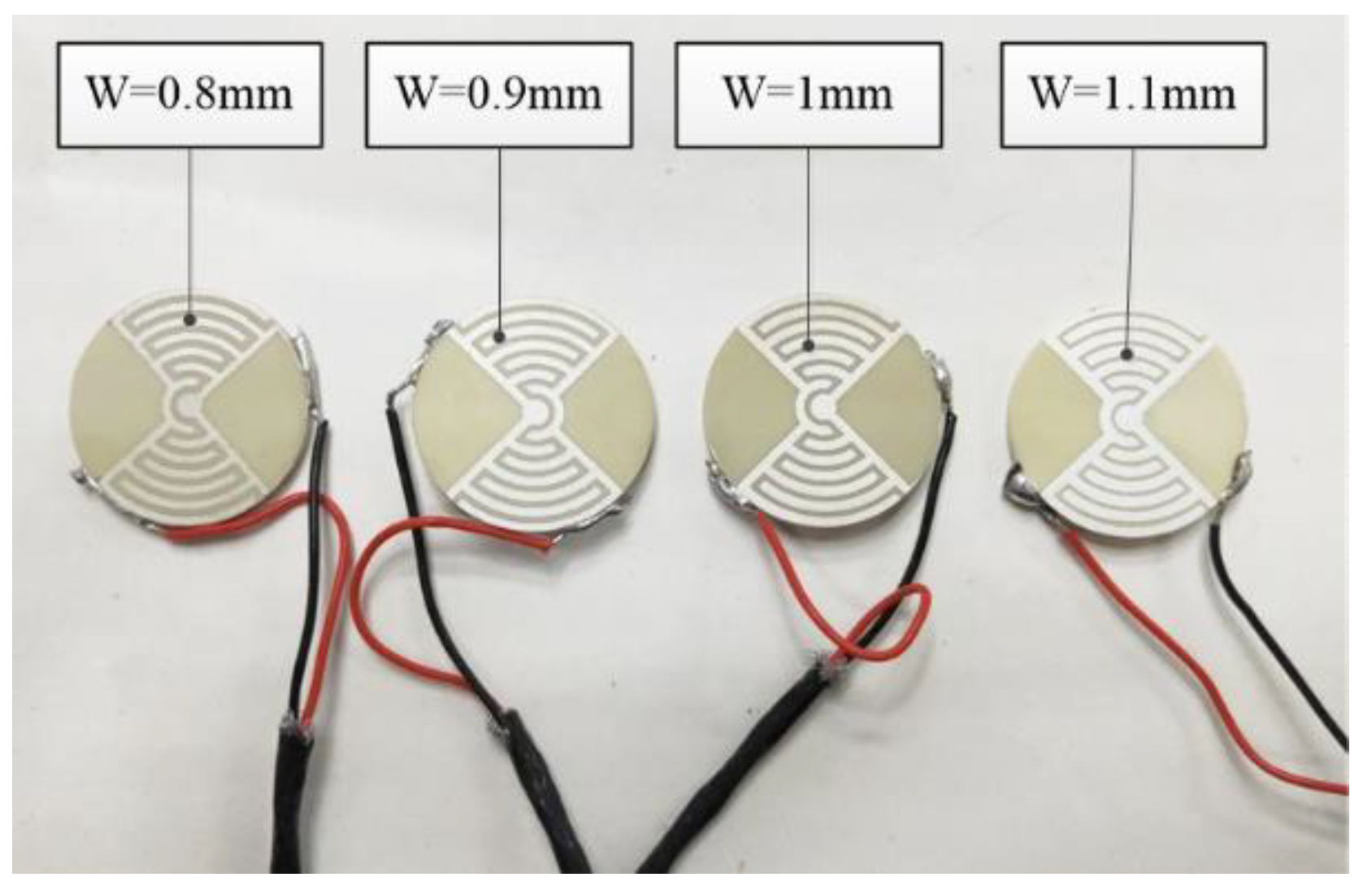
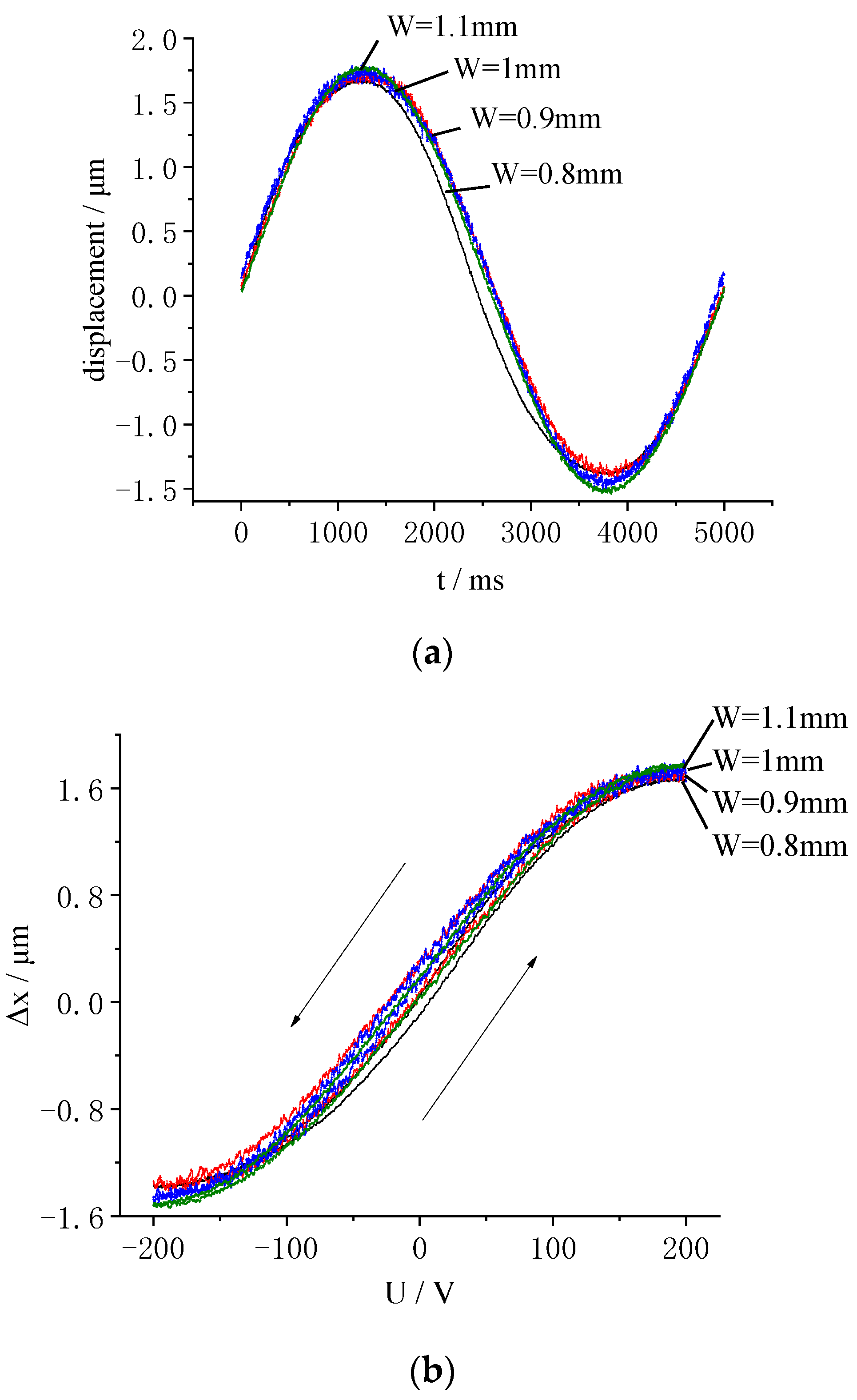
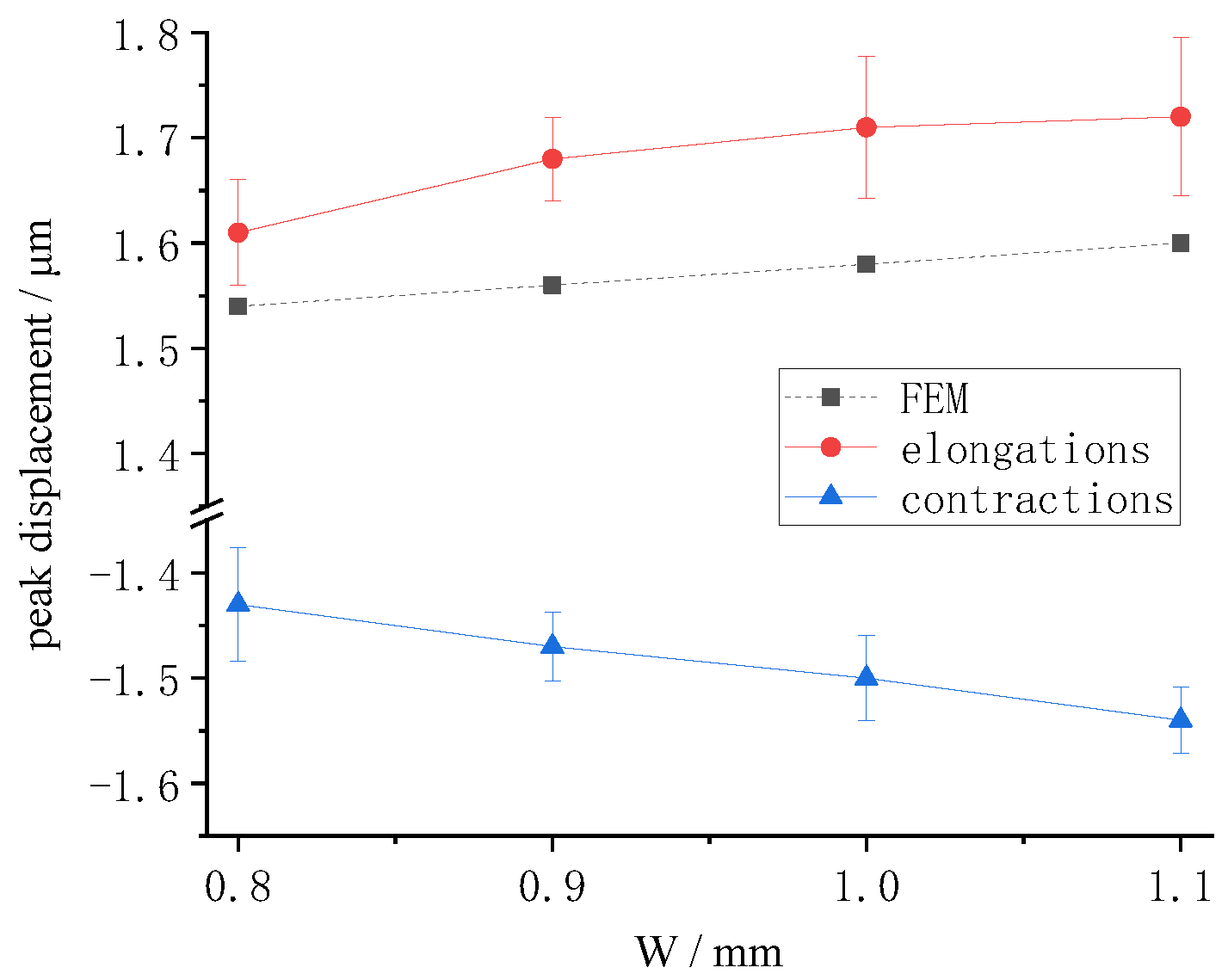
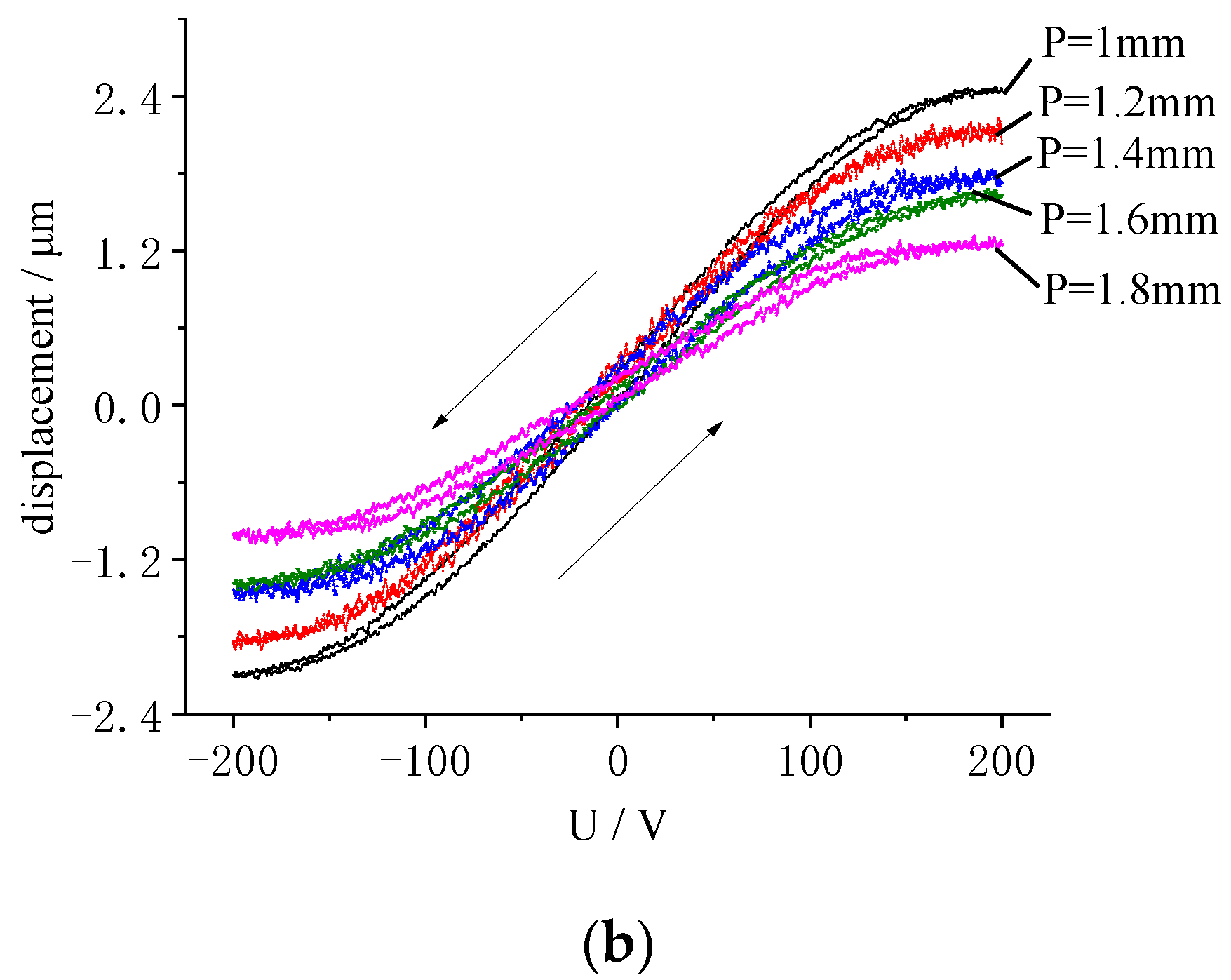
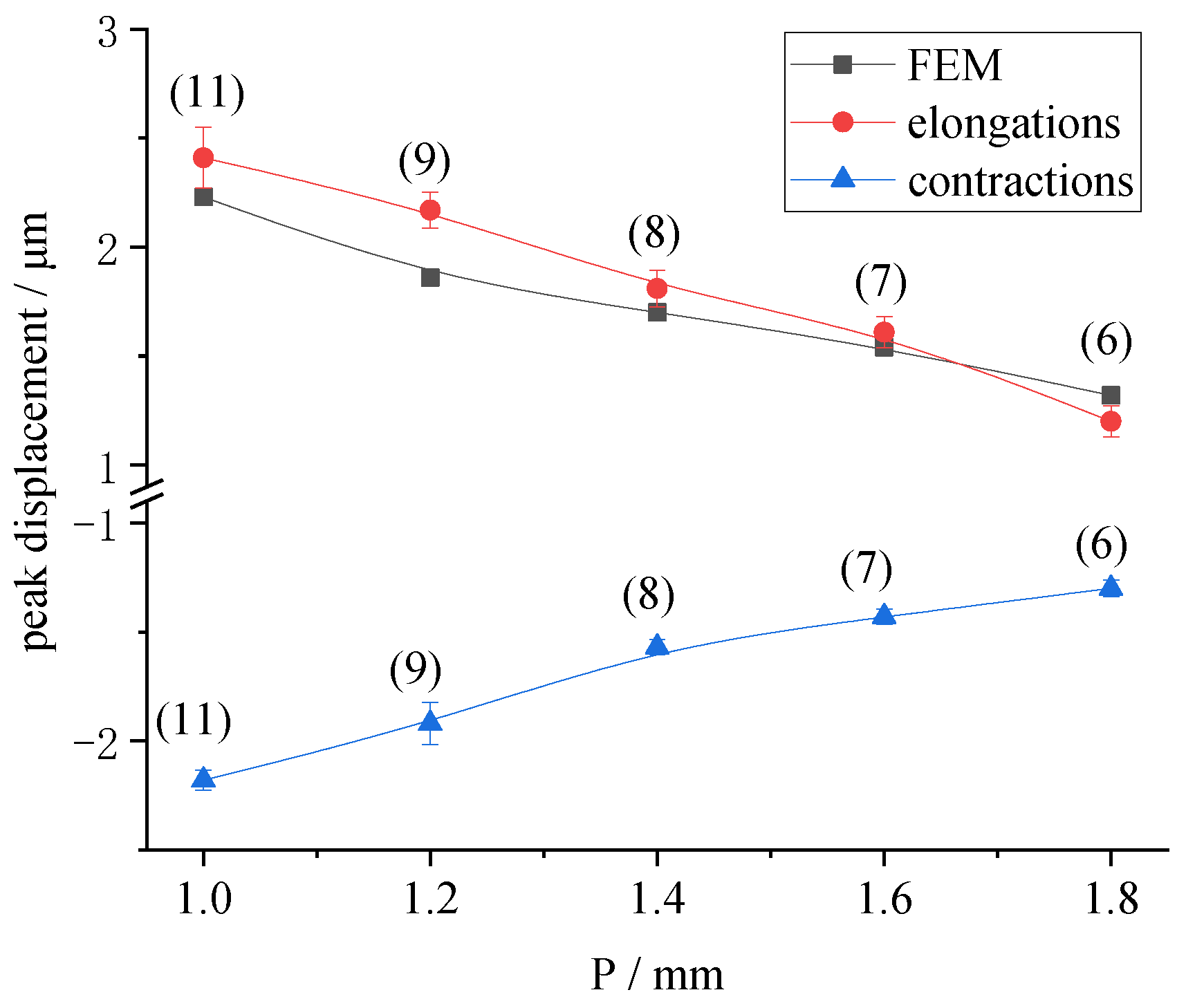
4.2.3. Effect of Electrode Width on Displacement
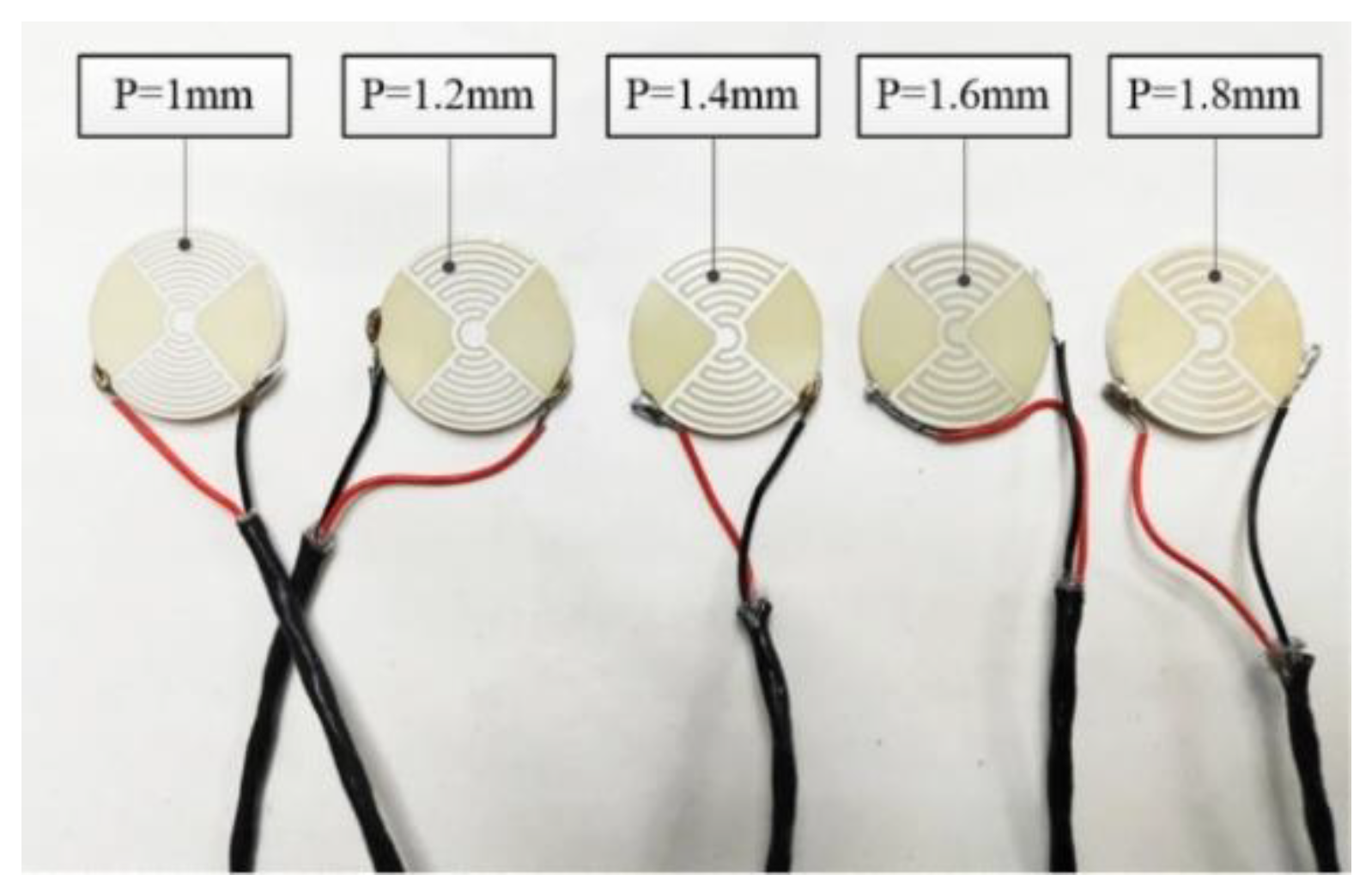
4.2.4. Effect of Electrode Center Distance and Number of Rings on Displacement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, C. Ultrasonic Motors Technologies and Applications; Springer: Berlin, Germany, 2011. [Google Scholar]
- Li, P.Z.; Wang, X.D.; Zhao, L.; Zhang, D.F.; Guo, K. Dynamic linear modeling, identification and precise control of a walking piezo-actuated stage. Mech. Syst. Signal Process. 2019, 128, 141–152. [Google Scholar] [CrossRef]
- Makarem, S.; Delibas, B.; Koc, B. Data-driven tuning of PID controlled piezoelectric ultrasonic motor. Actuators 2021, 10, 148. [Google Scholar] [CrossRef]
- Sinkevicius, G.; Vengelis, J.; Banys, J.; Masiulis, L.; Grigonis, R.; Baskys, A.; Sirutkaitsi, V.; Domarkas, J. Investigation of piezoelectric ringing effects in deuterated potassium dihydrogen phosphate crystals. Opt. Eng. 2020, 59, 036107. [Google Scholar] [CrossRef]
- Levy, D.A.; Shapiro, A. Model and analysis of piezoelectric actuator in practical three-stage mechanism. Int. J. Precis. Eng. Manuf. 2020, 21, 1717–1728. [Google Scholar] [CrossRef]
- Bouchilloux, P.; Claeyssen, F.; Letty, R.L. Amplified piezoelectric actuators: From aerospace to underwater applications. In Proceedings of the SPIE—Smart Structures and Materials 2004: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 29 July 2004; Published by Society of Photo-Optical Instrumentation Engineers. Volume 5388, pp. 143–154. [Google Scholar]
- Deng, J.; Liu, Y.; Chen, W.; Liu, J. Development and experiment evaluation of an inertial piezoelectric actuator using bending-bending hybrid modes. Sens. Actuators A Phys. 2018, 275, 11–18. [Google Scholar] [CrossRef]
- Mu, Y.; Hu, T.; Gong, H.; Wang, L.; Li, S. A dual-stage low-power converter driving for piezoelectric actuator applied in micro robot. Int. J. Adv. Robot. Syst. 2019, 16, 172988141982684. [Google Scholar] [CrossRef] [Green Version]
- Abadi, A.; Kosa, G. Piezoelectric beam for intrabody propulsion controlled by embedded sensing. IEEE/ASME Trans. Mechatron. 2016, 21, 1528–1539. [Google Scholar] [CrossRef]
- Gudarzi, M.; Oveisi, A. Noise reduction in a medical imaging instrument using distributed piezoelectric actuator/sensor based on the FEM modeling. J. Sci. Eng. 2013, 2, 13–22. [Google Scholar]
- Kim, D.Y.; Sung Dea, N.; Seong, K.W.; Kim, M.N. Ear canal insertion-type piezoelectric bone conduction actuator of bridge structure. J. Mech. Med. Biol. 2020, 20, 2040026. [Google Scholar] [CrossRef]
- Deng, J.; Liu, Y.; Zhang, S.; Li, J. Development of a nano-positioning platform with large travel range based on bionic quadruped piezoelectric actuator. IEEE/ASME Trans. Mechatron. 2020, 26, 2059–2070. [Google Scholar] [CrossRef]
- Afonin, S.M. Rigidity of a multilayer piezoelectric actuator for the nano and micro range. Russ. Eng. Res. 2021, 41, 285–288. [Google Scholar] [CrossRef]
- Afonin, S.M. Block diagrams of a multilayer piezoelectric motor for nano- and microdisplacements based on the transverse piezoeffect. J. Comput. Syst. Sci. Int. 2015, 54, 424–439. [Google Scholar] [CrossRef]
- Hu, C.; Shi, Y.; Liu, F. Research on precision blanking process design of micro gear based on piezoelectric actuator. Micromachines 2021, 12, 200. [Google Scholar] [CrossRef]
- Tian, K.; Liu, Z.; Jing, T.; Zhu, Y. Rate-dependent input curve shaping of the piezoelectric actuator based optical resonator cavity displacement characteristics for an external cavity diode laser. Rev. Sci. Instrum. 2021, 92, 095008. [Google Scholar] [CrossRef]
- Shi, Y.; Lou, C.; Zhang, J. Investigation on a linear piezoelectric actuator based on stick-slip/scan excitation. Actuators 2021, 10, 39. [Google Scholar] [CrossRef]
- Qin, H.; Bu, N.; Wei, C.; Yin, Z. An asymmetric hysteresis model and parameter identification method for piezoelectric actuator. Math. Probl. Eng. 2014, 2014, 932974. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Liu, Y.; Wei, G.; Chen, J. Mixed piezothermoelastic finite element model for THUNDER actuators. AIAA J. 2011, 49, 2100–2108. [Google Scholar] [CrossRef]
- Kim, H.; Tadesse, Y.; Priya, S. Piezoelectric energy harvesting. Sens. Rev. 2015, 269, 991–1001. [Google Scholar]
- Muraoka, M.; Sanada, S. Displacement amplifier for piezoelectric actuator based on honeycomb link mechanism. Sens. Actuators A Phys. 2010, 157, 84–90. [Google Scholar] [CrossRef]
- Park, M.; Shin, S.; Han, S.; Oh, W.; Park, C.; Kim, D.; Jang, M.; Lee, S.; Park, J. Design, fabrication of honeycomb-shaped 1–3 connectivity piezoelectric micropillar arrays for 2D ultrasound transducer application. Ceram. Int. 2020, 46, 12023–12030. [Google Scholar] [CrossRef]
- Fujimura, Y.; Tsukamoto, T.; Tanaka, S. 2-axis resonant microstage using single piezoelectric Moonie-type microactuator. IEEJ Trans. Sens. Micromach. 2018, 138, 516–522. [Google Scholar] [CrossRef]
- Fujimura, Y.; Tsukamoto, T.; Tanaka, S. Piezoelectric Moonie-type resonant microactuator. IEEJ Trans. Sens. Micromach. 2017, 137, 95–100. [Google Scholar] [CrossRef]
- Huan, H.T.; Gao, C.M.; Liu, L.X.; Sun, Q.; Zhao, B.; Yan, L. Research of ultrasound-mediated transdermal drug delivery system using cymbal-type piezoelectric composite transducer. Int. J. Thermophys. 2015, 36, 1312–1319. [Google Scholar] [CrossRef]
- Huang, J.; Zhu, Y.C.; Shi, W.D.; Zhang, J.H. Theory and experimental verification on cymbal-shaped slotted valve piezoelectric pump. Chin. J. Mech. Eng. 2018, 131, 212–219. [Google Scholar] [CrossRef]
- Bowen, C.R.; Stevens, R.; Nelson, L.J.; Dent, A.C.; Dolman, G.; Su, B.; Button, T.W.; Cain, M.G.; Stewart, M. Manufacture and characterization of high activity piezoelectric fibres. Smart Mater. Struct. 2006, 15, 295–301. [Google Scholar] [CrossRef]
- Bowen, C.R.; Nelson, L.J.; Stevens, R.; Cain, M.G.; Stewart, M. Optimization of interdigitated electrodes for piezoelectric actuators and active fiber composites. J. Electroceram. 2006, 16, 263–269. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, J.; Li, C.; Fu, X. A micro-power generator based on two piezoelectric MFC films. Crystals 2021, 11, 861. [Google Scholar] [CrossRef]
- Paczek, M.; Kokot, G. Modelling and laboratory tests of the temperature influence on the efficiency of the energy harvesting system based on MFC piezoelectric transducers. Sensors 2019, 19, 1558. [Google Scholar] [CrossRef] [Green Version]
- Panda, S.; Reddy, N.H.; Kumar, A. Design and finite element analysis of a short piezoelectric fiber-reinforced composite actuator. Arch. Appl. Mech. 2015, 85, 691–711. [Google Scholar] [CrossRef]
- Trindade, M.A.; Benjeddou, A. Finite element characterisation of multilayer d31 piezoelectric macro-fibre composites. Compos. Struct. 2016, 151, 47–57. [Google Scholar] [CrossRef]
- Emad, D.; Fanni, M.A.; Mohamed, A.M. New efficient technique for finite element modeling of macro fiber composite piezoelectric materials. Mater. Sci. Forum 2020, 998, 221–226. [Google Scholar] [CrossRef]
- Tajdari, F.; Berkhoff, A.P.; Naves, M.; Nijenhuis, M.; Boer, A.D. A low-profile flexural displacement-converter mechanism for piezoelectric stack actuators. Sens. Actuators A Phys. 2020, 313, 112198. [Google Scholar] [CrossRef]
- Tajdari, F.; Berkhoff, A.P.; Boer, A.D. Numerical and experimental studies of a flat acoustic source that is actuated by an integrated flexure-based piezoelectric mechanism. J. Sound Vib. 2020, 482, 115435. [Google Scholar] [CrossRef]
- Liu, Y.G.; Zhang, S.L.; Zeng, A.K.; Yan, P.F. Finite Element Analysis and Polarization Test of IDEs Piezoelectric Actuator. Micromachines 2022, 13, 154. [Google Scholar] [CrossRef]
- Guennam, A.E.; Luccioni, B.M. Numerical modelling of micro energy harvesting systems based on piezoelectric composites polarized with interdigitated electrodes. Smart Mater. Struct. 2020, 29, 075015. [Google Scholar] [CrossRef]
- Xu, M.H.; Zhou, H.; Zhu, L.H.; Shen, J.N.; Guo, H. Design and fabrication of a D33-mode piezoelectric micro-accelerometer. Microsyst. Technol. 2019, 25, 4465–4474. [Google Scholar] [CrossRef]
- Basudeba, B. Design and investigation of a dual friction-drive-based linbo3 piezoelectric actuator employing a cylindrical shaft as slider. IEEE Sens. J. 2019, 19, 11980–11987. [Google Scholar]
- Liang, K.; Li, C.; Tong, Y.; Fang, J.; Zhong, W. Design of a low-frequency harmonic rotary piezoelectric actuator. Actuators 2020, 10, 4. [Google Scholar] [CrossRef]
- Mamishev, A.V.; Sundara-Rajan, K.; Yang, F.; Du, Y.; Zahn, M. Interdigital sensors and transducers. Proc. IEEE 2004, 92, 808–845. [Google Scholar] [CrossRef] [Green Version]
- Tu, Z.; Xia, Z.; Luo, W.; Huang, P.; Lin, J. Structural design of flexible interdigital capacitor based upon 3d printing and spraying process. Smart Mater. Struct. 2022, 31, 045005. [Google Scholar] [CrossRef]
- Lai, S.; Zhang, J.; Yan, Y.; Yu, H. Optimization design strategy of electroadhesive devices with interdigital electrodes based on the multiparameters theoretical model. Math. Probl. Eng. 2021, 2021, 3737490. [Google Scholar] [CrossRef]
- Zhang, L.; Gui, J.; Wu, Z.; Li, R.; Wang, Y.; Gong, Z.; Zhao, X.; Sun, C.; Guo, S. Enhanced performance of piezoelectric nanogenerator based on aligned nanofibers and three-dimensional interdigital electrodes. Nano Energy 2019, 65, 103924. [Google Scholar] [CrossRef]
- Tian, Z.; Yang, S.; Huang, P.H.; Wang, Z.; Zhang, P.; Gu, Y.; Bachman, H.; Chen, C.; Wu, M.; Xie, Y.; et al. Wave number-spiral acoustic tweezers for dynamic and reconfigurable manipulation of particles and cells. Sci. Adv. 2019, 5, eaau6062. [Google Scholar] [CrossRef] [PubMed] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relative Dielectric Constant | Piezoelectric Strain Constant/pC/N | |||
|---|---|---|---|---|
| d31 | d33 | d15 | ||
| 3500 | 3250 | 260 | 575 | 950 |
| Piezo Rings | O1 | O2 | O3 | O4 | O5 | O6 | O7 |
|---|---|---|---|---|---|---|---|
| r1/mm | 12.5 | 10.5 | 8.9 | 7.3 | 5.7 | 4.1 | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, S.; Yan, P.; Li, H. Finite Element Modeling and Test of Piezo Disk with Local Ring Electrodes for Micro Displacement. Micromachines 2022, 13, 951. https://doi.org/10.3390/mi13060951
Liu Y, Zhang S, Yan P, Li H. Finite Element Modeling and Test of Piezo Disk with Local Ring Electrodes for Micro Displacement. Micromachines. 2022; 13(6):951. https://doi.org/10.3390/mi13060951
Chicago/Turabian StyleLiu, Yonggang, Shuliang Zhang, Pengfei Yan, and Hiji Li. 2022. "Finite Element Modeling and Test of Piezo Disk with Local Ring Electrodes for Micro Displacement" Micromachines 13, no. 6: 951. https://doi.org/10.3390/mi13060951