
Design and Joint Position Control of Bionic Jumping Leg Driven by Pneumatic Artificial Muscles


Abstract
:1. Introduction
- High power/weight ratio: the power/weight ratio of pneumatic McKibben artificial muscles can be 500 W/kg~2 kW/kg, which surpasses the ratio of electric motors that is in the order of 100 W/Kg [9].
- Flexibility and compliance: non-pressurized PAMs show the same flexibility as a bladder but become rigid and maintain reasonable flexibility when pressurized.
- Safety and environmental protection: the main driving mechanism of pneumatic artificial muscles is pressurized air or inert gas. Therefore, compared with other electrical, thermal, or chemical equipment, they are safer and more environmentally friendly [10].
2. Design of Bionic Leg Driven by Pneumatic Artificial Muscles
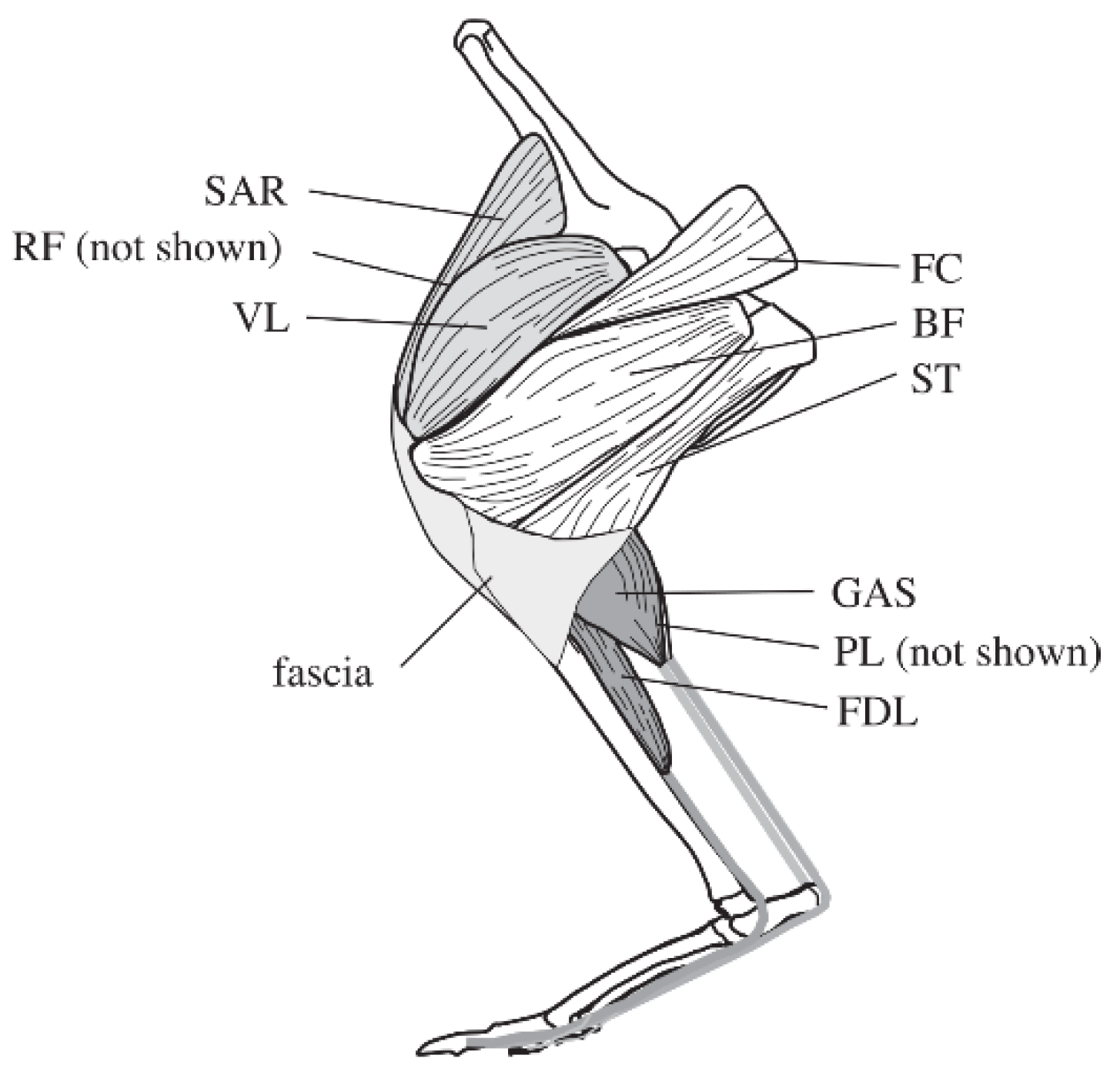
2.1. Physiological Structure and Muscle Distribution of Kangaroos
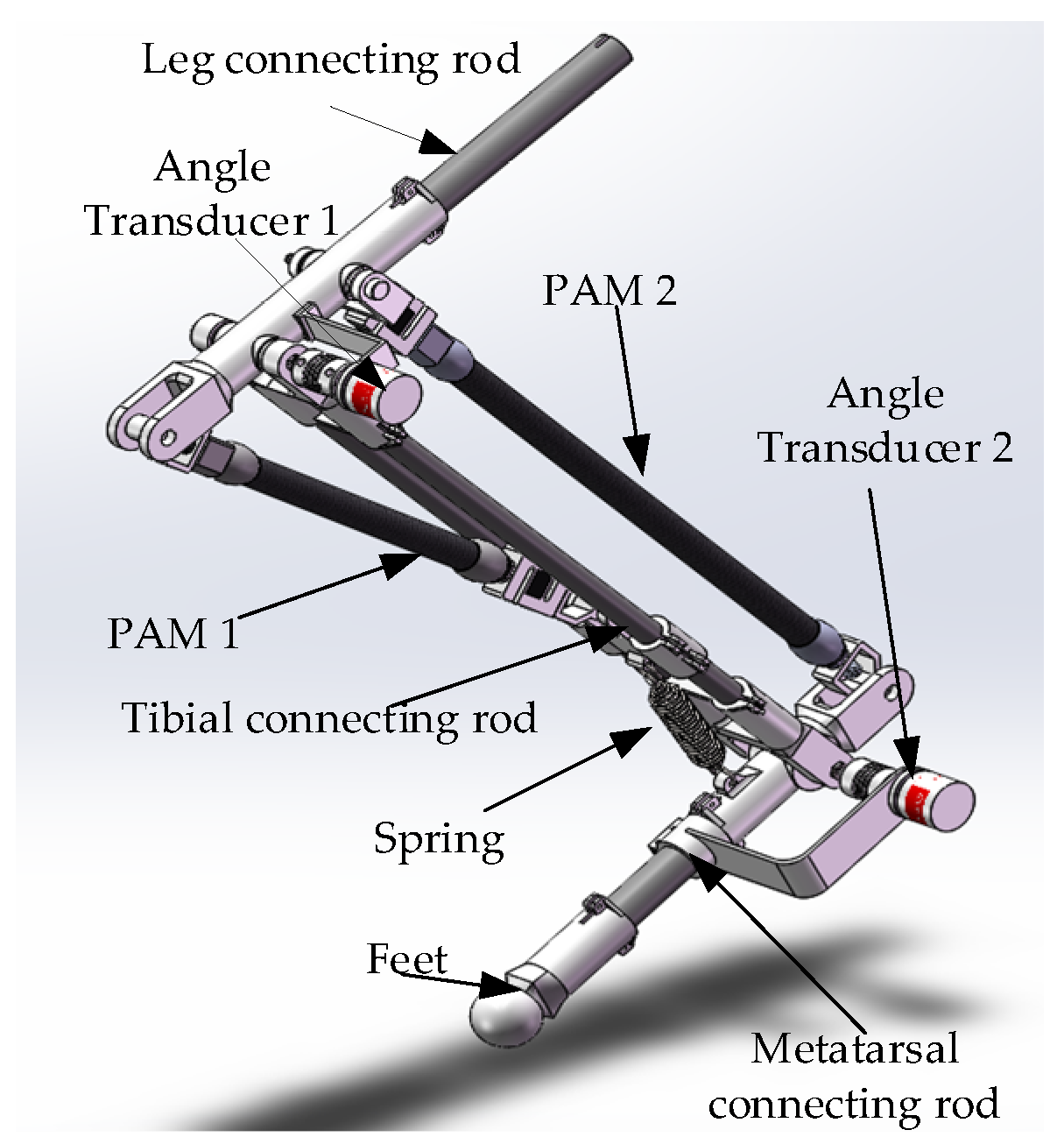
2.2. Structure Design
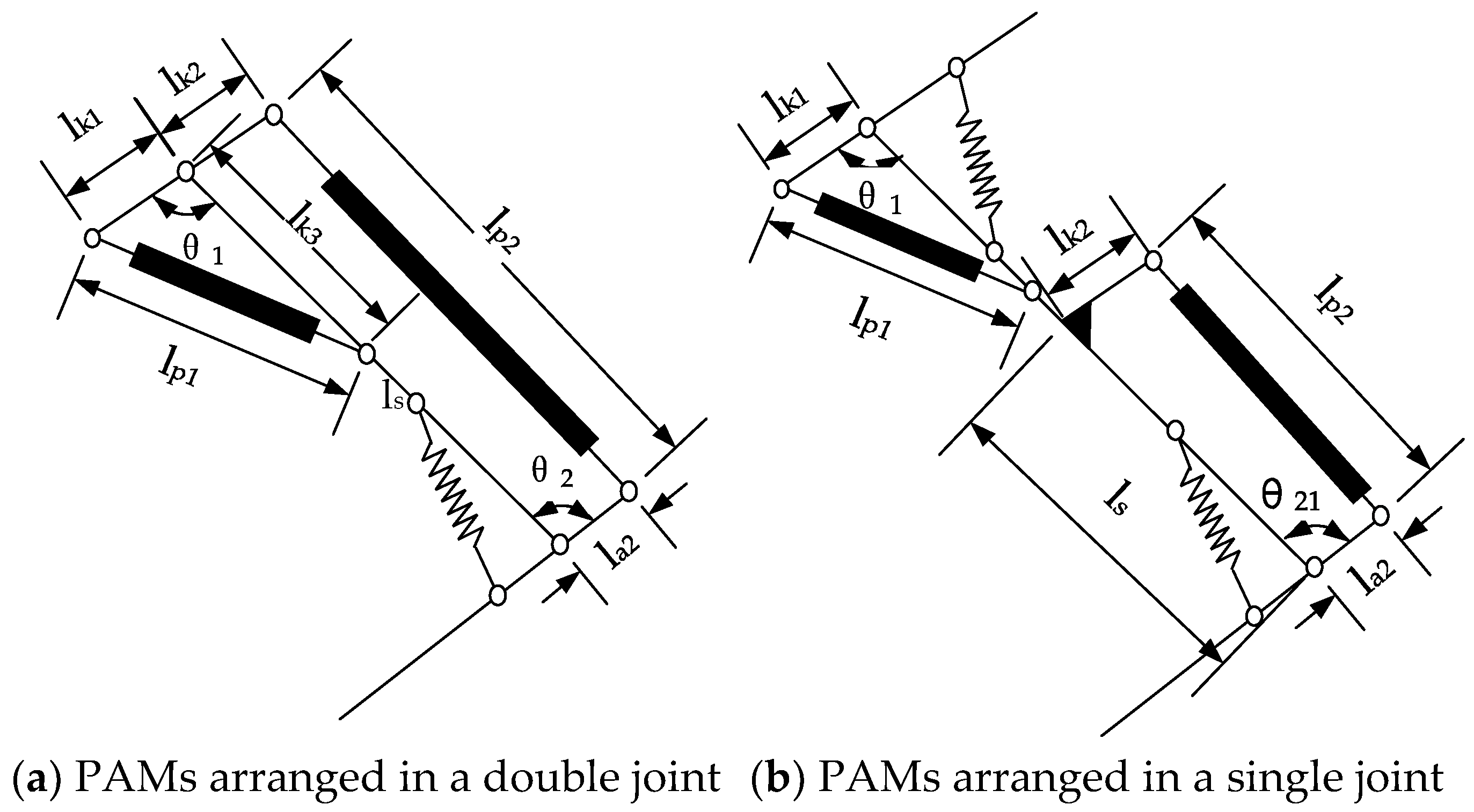
2.3. Analysis of Bionic Leg Joint
3. Biomimetic Leg Dynamics
3.1. Force Model of Pneumatic Artificial Muscle
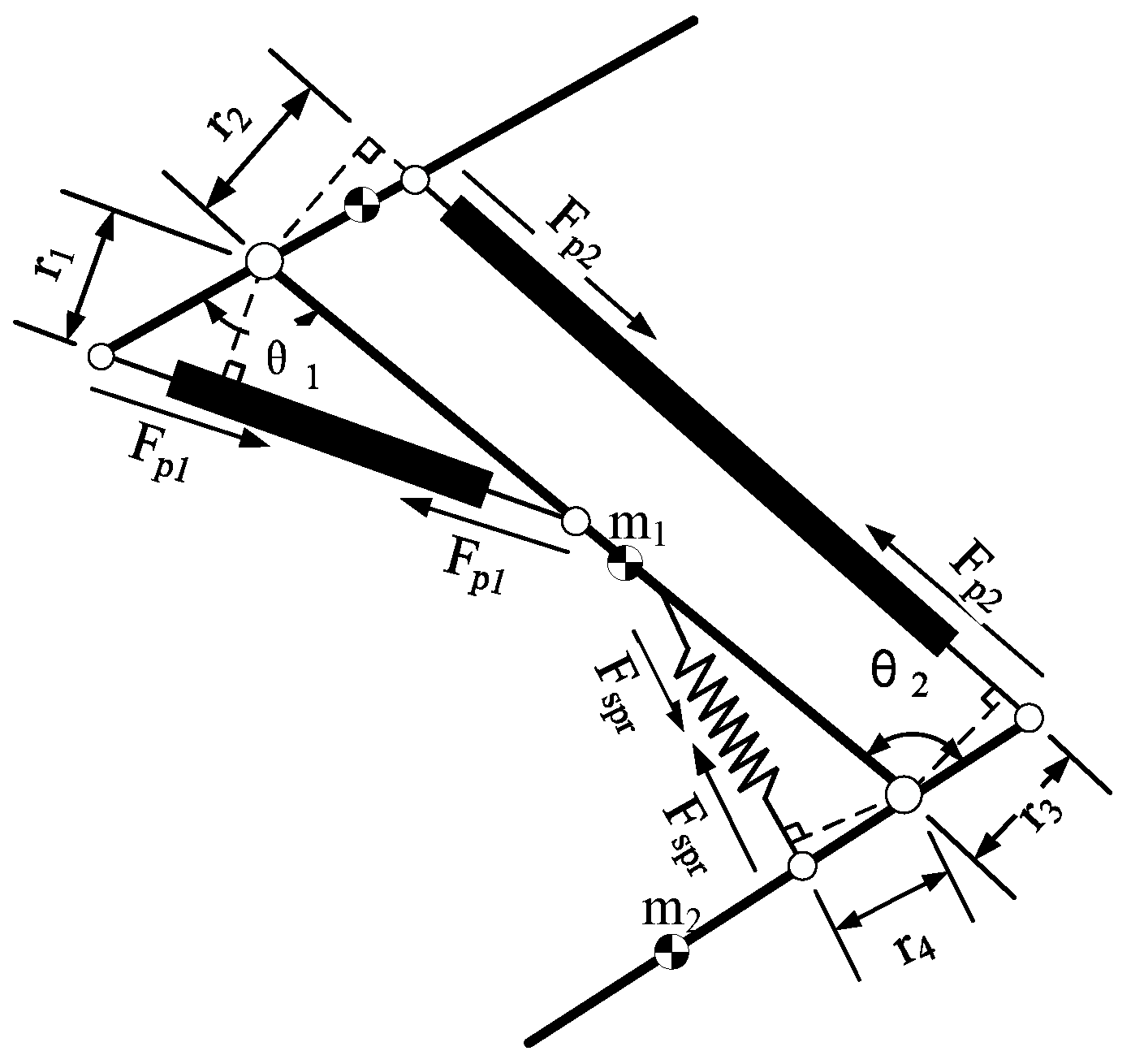
3.2. Dynamics of Bionic Leg
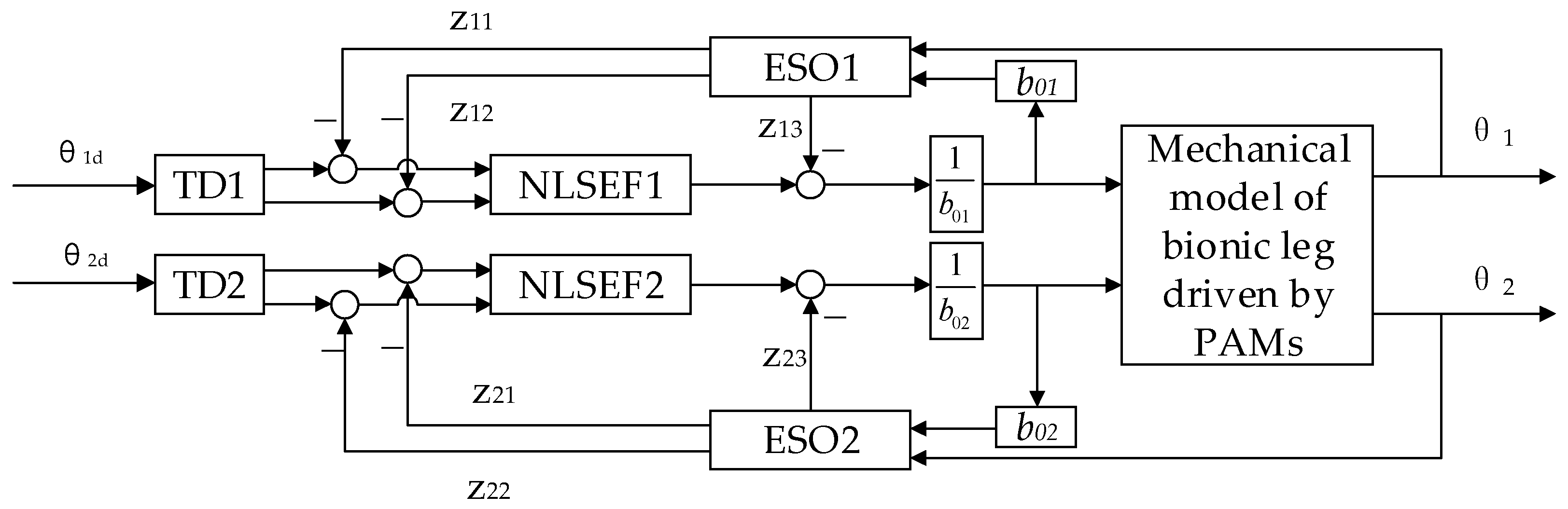
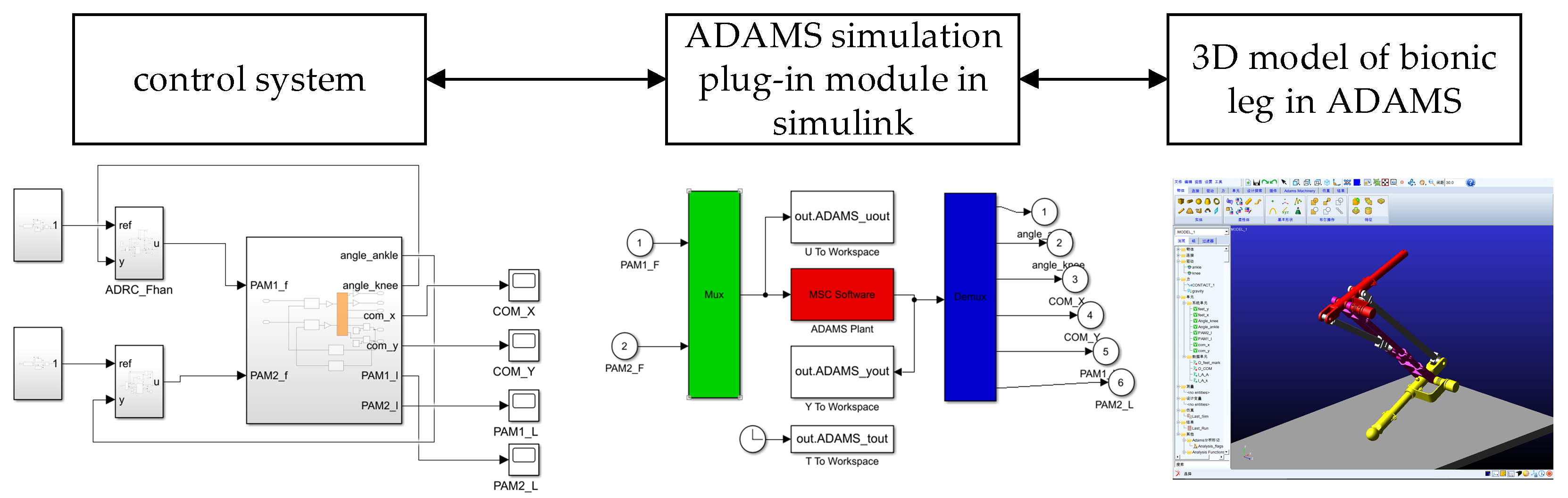
4. Simulation of Joint Position Control with ADRC
4.1. Joint Position Control of Bionic Leg
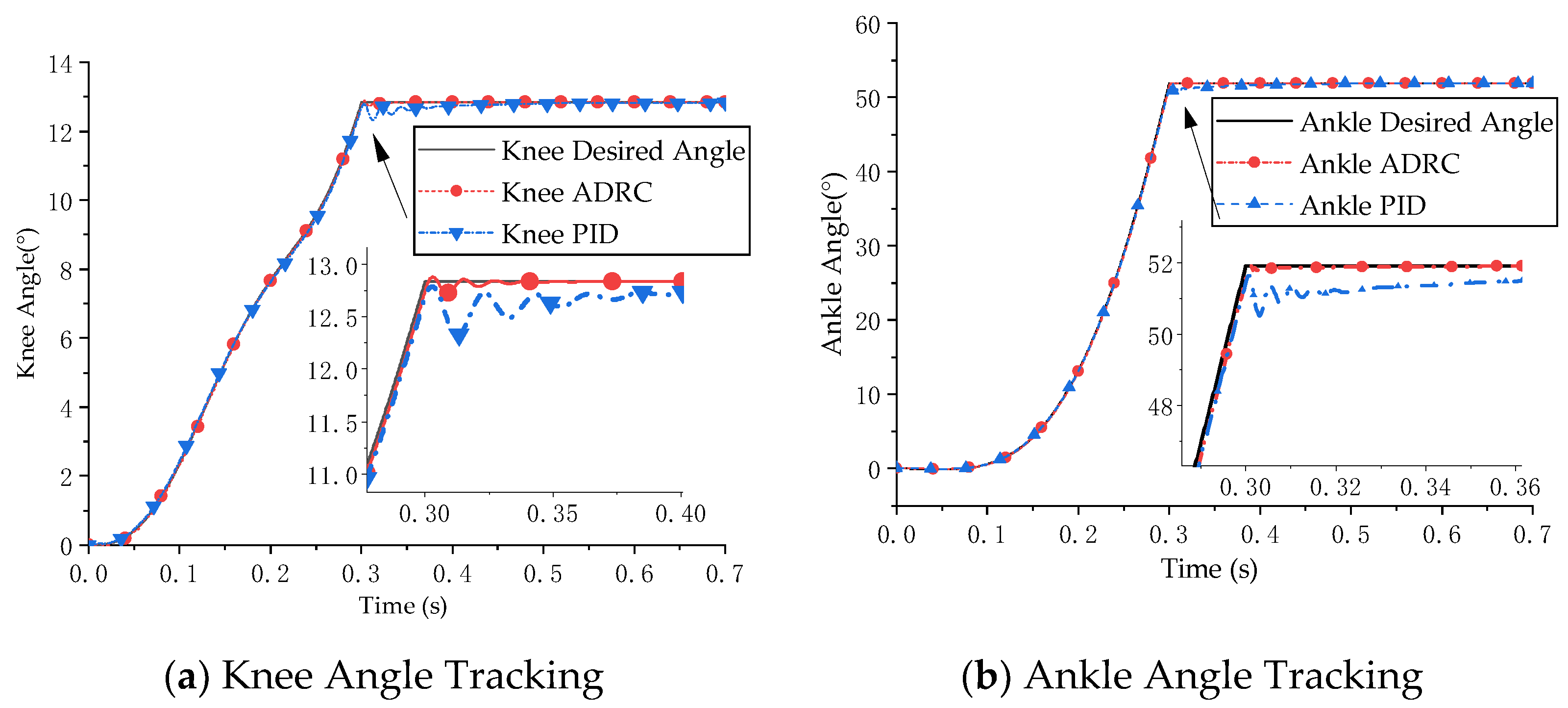
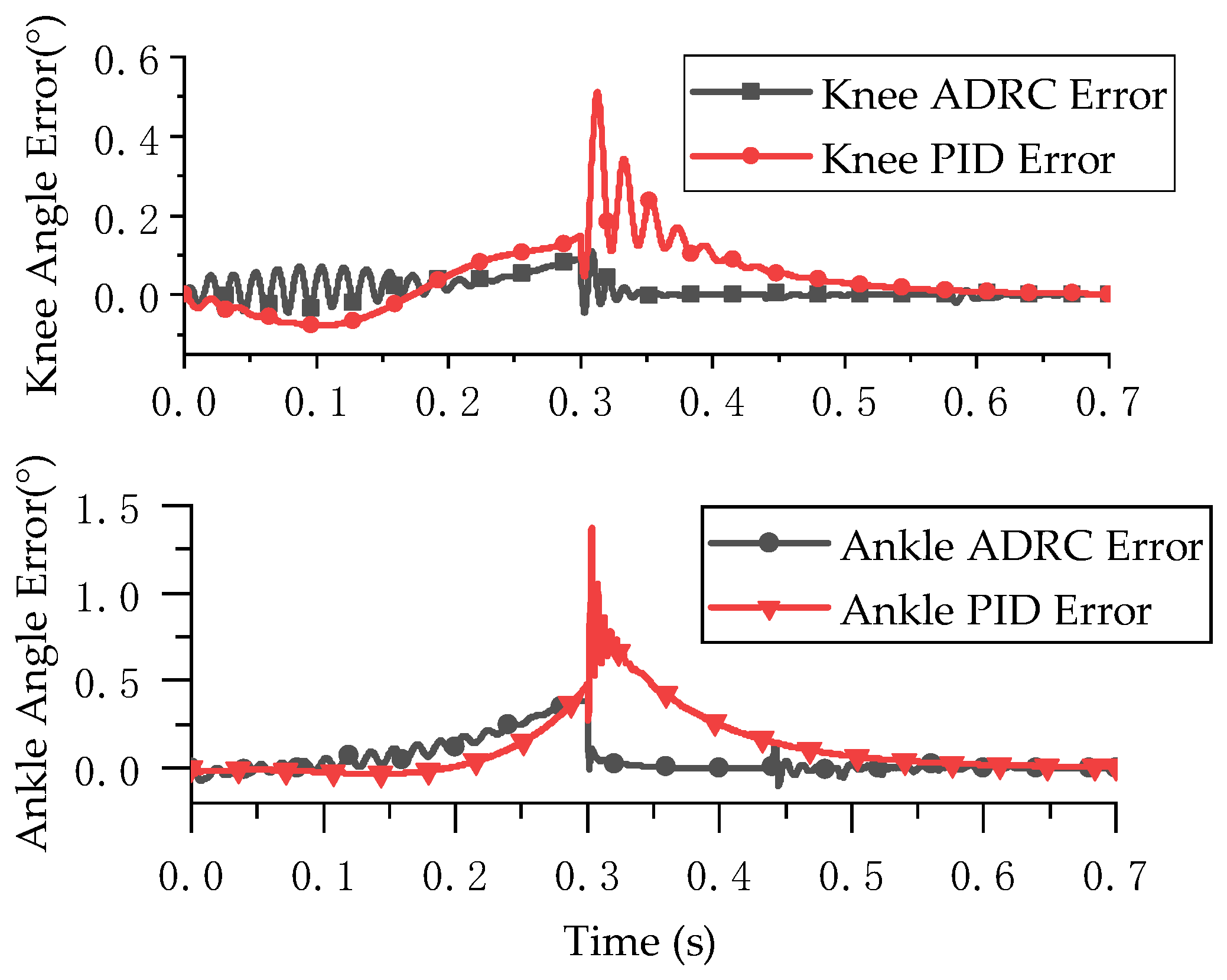
4.2. Position Control Simulation of the Bionic Leg
5. Experiment
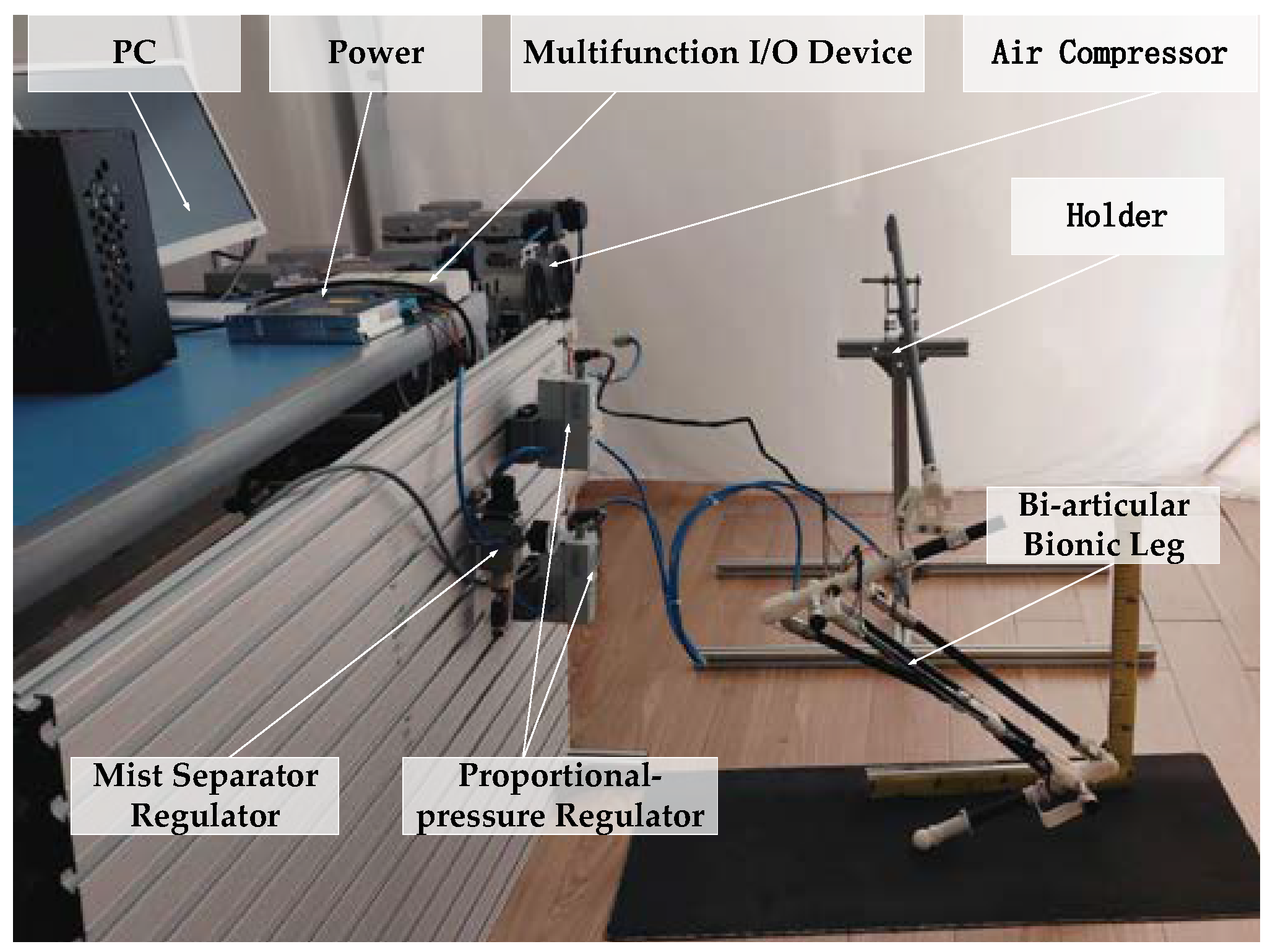
5.1. Experimental System
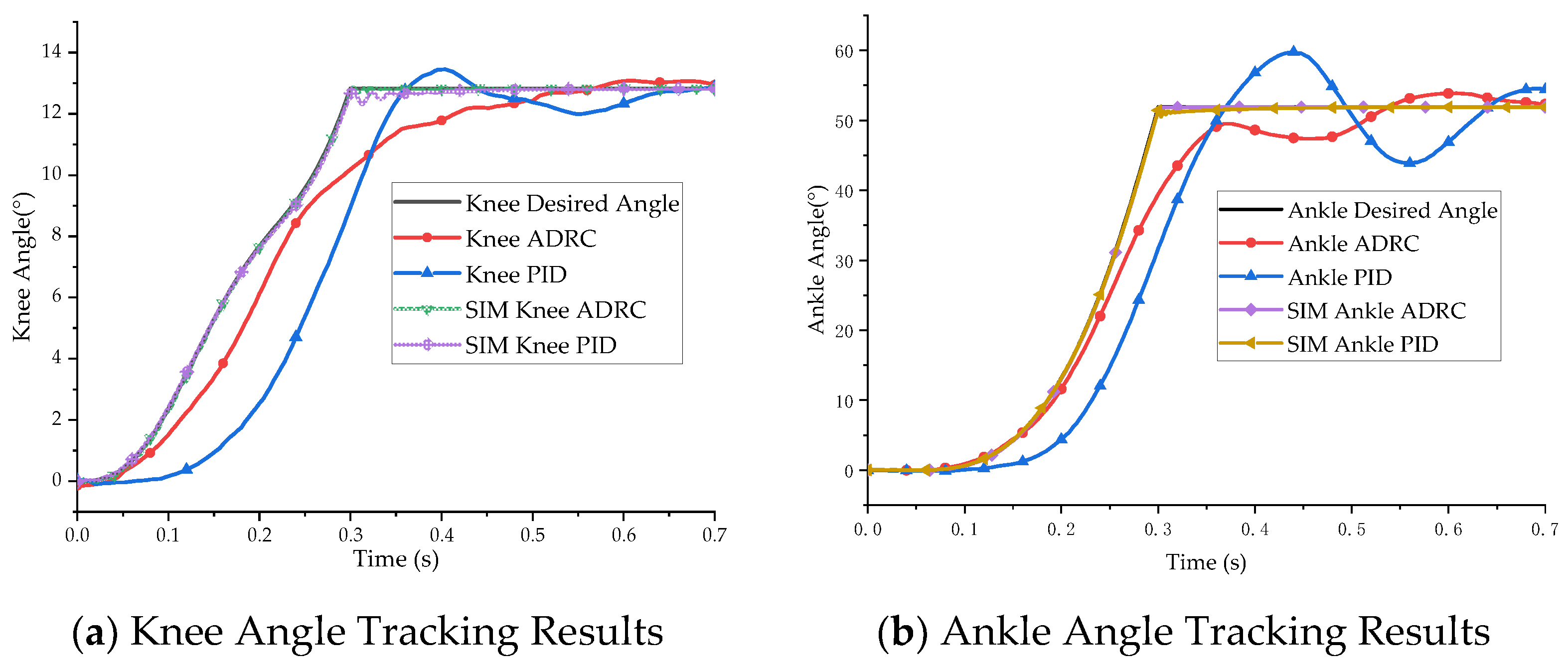
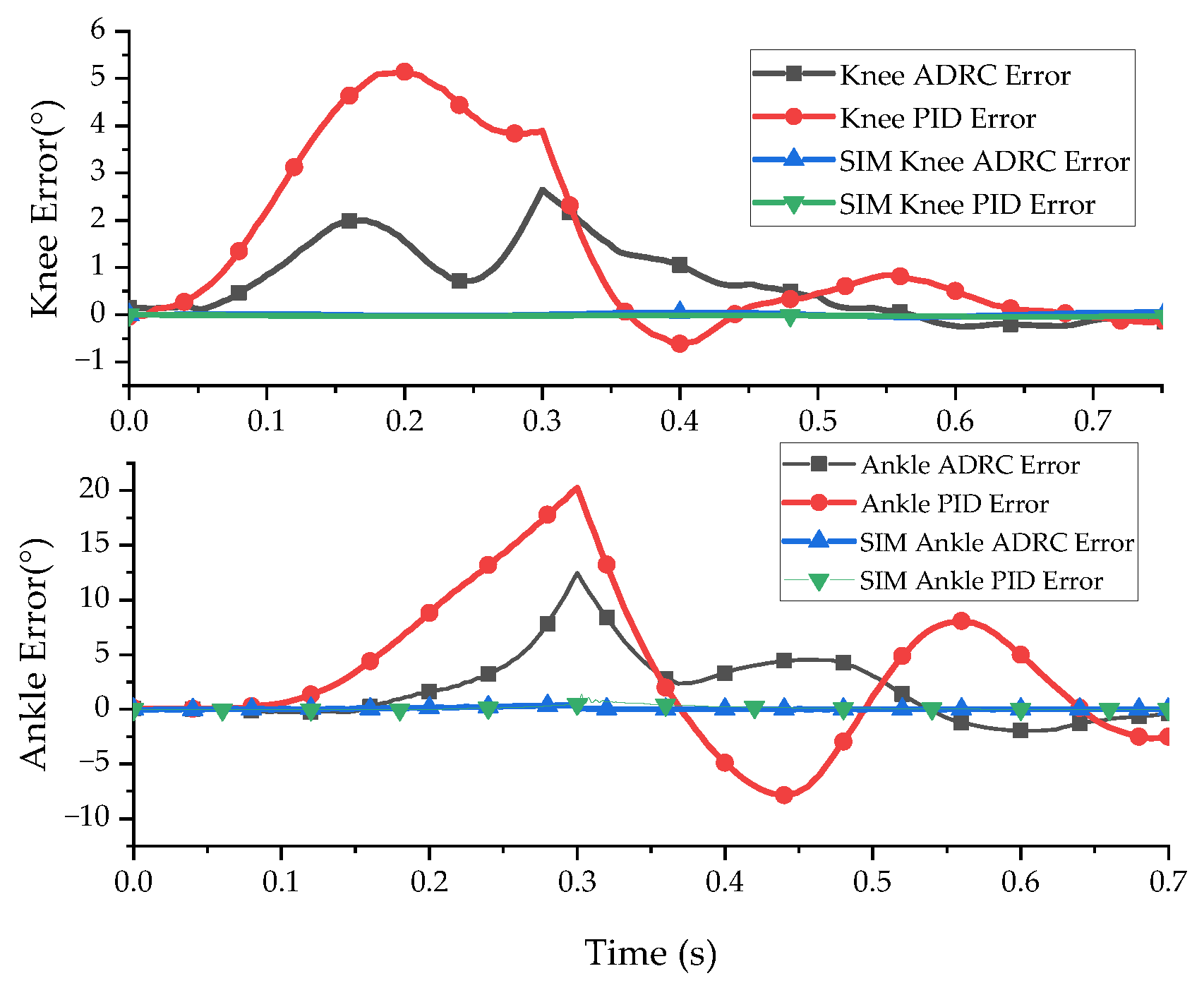
5.2. Position Control Experiment for Biarticular Bionic Leg
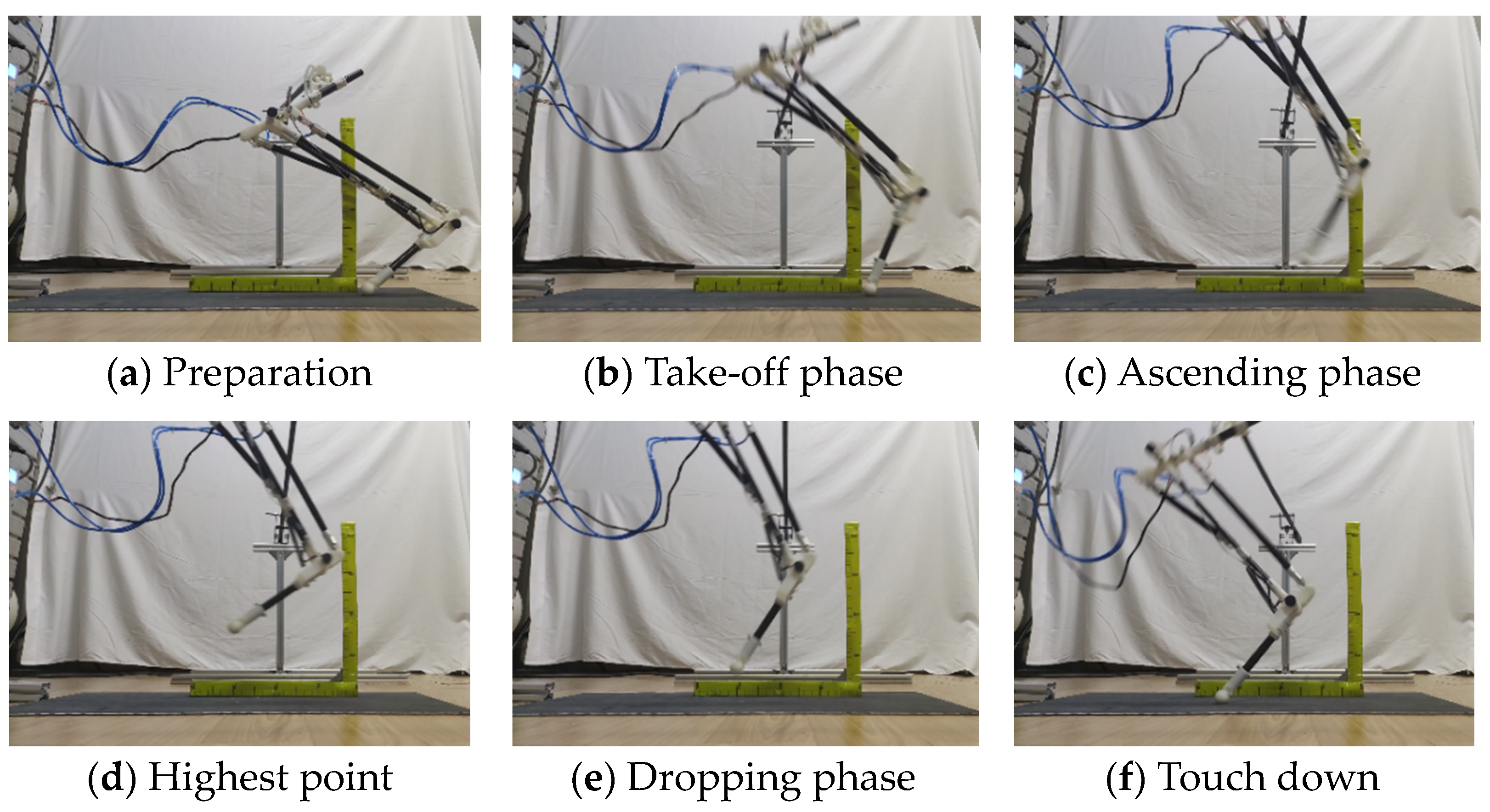
5.3. Bionic Leg Jumping Experiment
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, D.; Chen, K.; Zhang, Z.; Zhang, B. Mechanism of locust air posture adjustment. J. Bionic Eng. 2015, 12, 418–431. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, D.; Chen, K.; Chen, H. Analysis and comparison of two jumping leg models for bioinspired locust robot. J. Bionic Eng. 2016, 13, 558–571. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, J.; Chen, H.; Chen, D. A Survey of Bioinspired Jumping Robot: Takeoff, Air Posture Adjustment, and Landing Buffer. Appl. Bionics Biomech. 2017, 2017, 4780160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Z.; Jin, B.; Zhu, S.; Huang, H.; Chen, G. Design and experiment of single leg of hydraulically actuated bionic multi-legged robot. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42. [Google Scholar]
- Graichen, K.; Hentzelt, S.; Hildebrandt, A.; Kärcher, N.; Gaißert, N.; Knubben, E. Control design for a bionic kangaroo. Control. Eng. Pract. 2015, 42, 106–117. [Google Scholar] [CrossRef]
- Graichen, K.; Hentzelt, S. A bi-level nonlinear predictive control scheme for hopping robots with hip and tail actuation. IEEE Int. Conf. Intell. Robot. Syst. 2015, 2015, 4480–4485. [Google Scholar]
- Tondu, B. Modelling of the McKibben artificial muscle: A review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Katchalsky, A. Rapid swelling and deswelling of reversible gels of polymeric acids by ionization. Experientia 1949, 5, 319. [Google Scholar] [CrossRef]
- Caldwell, D.G.; Tsagarakis, N.; Artrit, P.; Canderle, J.; Davis, S.; Medrano-Cerda, G.A. Biomimetic and smart technology principles of humanoid design. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics., Como, Italy, 8–12 July 2001; Volume 2, pp. 965–970. [Google Scholar]
- Ashwin, K.P.; Ghosal, A. A Survey on Static Modeling of Miniaturized Pneumatic Artificial Muscles With New Model and Experimental Results. Appl. Mech. Rev. 2018, 70, 20. [Google Scholar] [CrossRef]
- Wang, X.; Li, M.; Guo, W.; Wang, P.; Sun, L. Development of an antagonistic bionic joint controller for a musculoskeletal quadruped. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4466–4471. [Google Scholar]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Non-linear control of pneumatic artificial muscles. In Proceedings of the 21st Mediterranean Conference on Control and Automation (MED), Chania, Greece, 25–28 June 2013; pp. 729–734. [Google Scholar]
- Niiyama, R.; Nagakubo, A.; Kuniyoshi, Y. Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 2546–2551. [Google Scholar]
- Zhong, J.; Luo, M.; Liu, X.; Fan, J.; Zhao, J. Frog-inspired jumping robot actuated by pneumatic muscle actuators. Adv. Mech. Eng. 2018, 10, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, Y.; Nishi, H.; Torii, Y.; Takanishi, A.; Lim, H.O. Mechanism and jumping pattern of one-legged jumping robot with pneumatic actuators. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1132–1136. [Google Scholar]
- Nishikawa, S.; Shida, K.; Kuniyoshi, Y. Musculoskeletal quadruped robot with Torque-Angle Relationship Control System. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4044–4050. [Google Scholar]
- Umehara, A.; Yamamoto, Y.; Nishi, H.; Takanishi, A.; Lim, H.O. Jumping pattern generation for one-legged jumping robot. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 1396–1400. [Google Scholar]
- Niiyama, R.; Kuniyoshi, Y. Design principle based on maximum output force profile for a musculoskeletal robot. Ind. Robot. 2010, 37, 250–255. [Google Scholar] [CrossRef] [Green Version]
- Hao, L.I.U.; Tao, W.; Wei, F.A.N.; Tong, Z.; Junzheng, W. Active Disturbance Rejection Control for the Joint Driven by PMAs. Robot 2011, 33, 461. [Google Scholar]
- Ugurlu, B.; Forni, P.; Doppmann, C.; Morimoto, J. Torque and variable stiffness control for antagonistically driven pneumatic muscle actuators via a stable force feedback controller. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1633–1639. [Google Scholar]
- Ugurlu, B.; Forni, P.; Doppmann, C.; Sariyildiz, E.; Morimoto, J. Stable Control of Force, Position, and Stiffness for Robot Joints Powered via Pneumatic Muscles. IEEE Trans. Ind. Inform. 2019, 15, 6270–6279. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, X.; Han, J. Active Model-Based Control for Pneumatic Artificial Muscle. Trans. Ind. Electron. 2017, 64, 1686–1695. [Google Scholar] [CrossRef]
- ZHU Jianmin, H.C. LEI Jingtao, QI Beichuan, Position/Stiffness Control of Antagonistic Bionic Joint Driven by Pneumatic Muscles Actuators. J. Mech. Eng. 2017, 53, 64–74. [Google Scholar]
- Hopwood, P.R.; Butterfield, R.M. The Locomotor Apparatus of the Crus and Pes of the Eastern Gray Kangaroo, Macropus-Giganteus. Aust. J. Zool. 1990, 38, 397–413. [Google Scholar] [CrossRef]
- Badoux, D. Some notes on the functional anatomy of Macropus giganteus Zimm. with general remarks on the mechanics of bipedal leaping. Cells Tissues Organs 1965, 62, 418–433. [Google Scholar] [CrossRef]
- Lodder, M.A. Functional morphology of the hindleg in two kangaroos Macropus giganteus and Aepyprymnus rufescens. Eur. J. Morphol. 1991, 29, 5–30. [Google Scholar]
- McGowan, C.P.; Skinner, J.; Biewener, A.A. Hind limb scaling of kangaroos and wallabies (superfamily Macropodoidea): Implications for hopping performance, safety factor and elastic savings. J. Anat. 2008, 212, 153–163. [Google Scholar] [CrossRef]
- Yu, H.; Guo, W.; Tan, H.; Li, M.; Cai, H. Design and Control on Antagonistic Bionic Joint Driven by Pneumatic Muscles Actuators. Chin. J. Mech. Eng. 2012, 48, 1–9. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. Ind. Electron. IEEE Trans. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Ziheng, C.; Jingtao, L.; Liya, C.; Tongyue, G. Hopping planning of the bionic leg mechanism driven by PAMs with biarticular muscle. High Technol. Lett. 2019, 25, 408–416. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Mass | Bionic Prototype | Jumping Height | Highlights |
|---|---|---|---|---|
| Musculoskeletal quadruped robot [16] | 6.0 kg | Quadruped mammals | 0.254 m | Torque-Angle Relationship Control System |
| One-Legged Jumping Robot [17] | 9.3 kg | Human | 0.1 m | Antagonistic, multi-joint muscles |
| Athlete Robot [18] | 10 kg | Human | 0.5 m | Stiffness planning and soft landing |
| Mowgli [13] | 3 kg | Human | 0.4 m | Soft landing |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| lk1/mm | 64 | la2/mm | 55 |
| lk2/mm | 55 | lp1/mm | 277~307 |
| lk3/mm | 263 | lp2/mm | 380~433 |
| ls/mm | 438 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Z.; Rao, J.; Xu, Z.; Lei, J. Design and Joint Position Control of Bionic Jumping Leg Driven by Pneumatic Artificial Muscles. Micromachines 2022, 13, 827. https://doi.org/10.3390/mi13060827
Dai Z, Rao J, Xu Z, Lei J. Design and Joint Position Control of Bionic Jumping Leg Driven by Pneumatic Artificial Muscles. Micromachines. 2022; 13(6):827. https://doi.org/10.3390/mi13060827
Chicago/Turabian StyleDai, Zhenhao, Jinjun Rao, Zili Xu, and Jingtao Lei. 2022. "Design and Joint Position Control of Bionic Jumping Leg Driven by Pneumatic Artificial Muscles" Micromachines 13, no. 6: 827. https://doi.org/10.3390/mi13060827