
Field Programmable Gate Array Based Torque Predictive Control for Permanent Magnet Servo Motors


Abstract
:1. Introduction
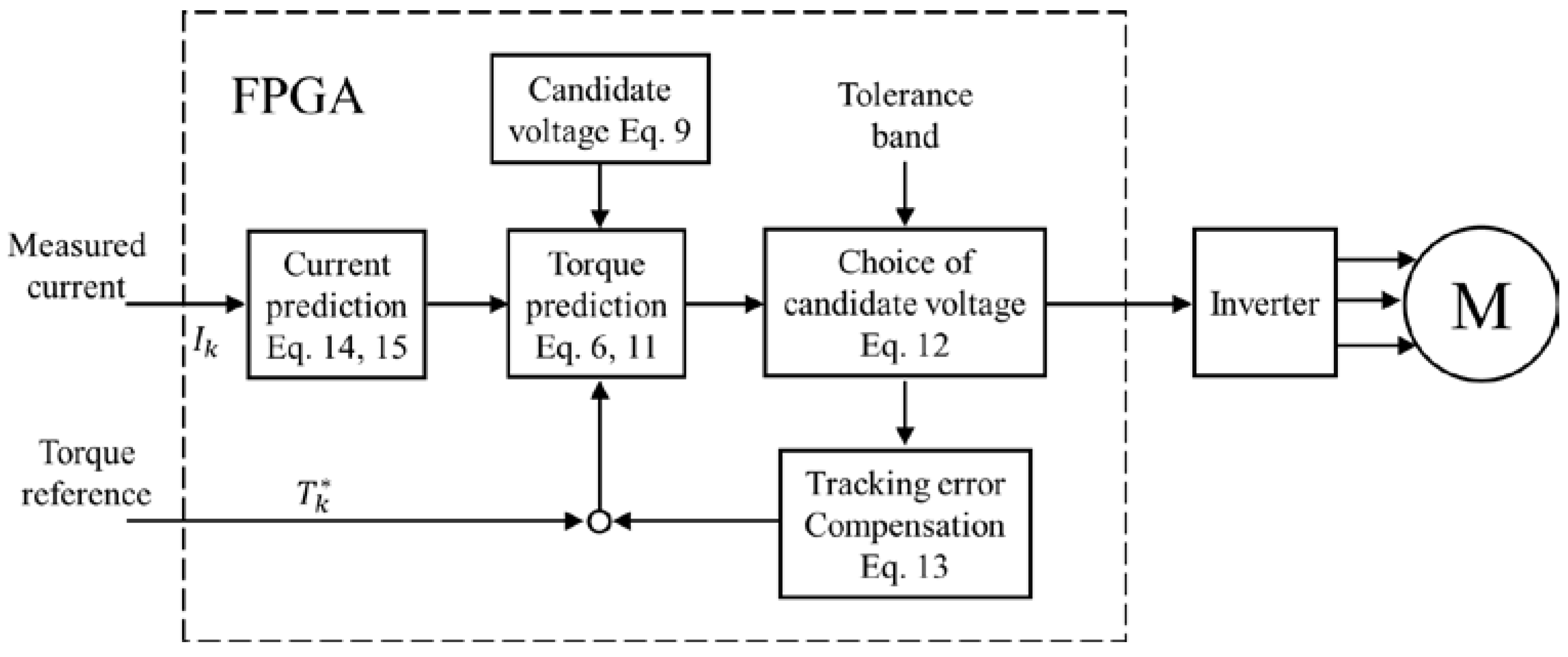
2. Principle of Predictive Torque Tracking Control
2.1. Prediction of the Motor Torque
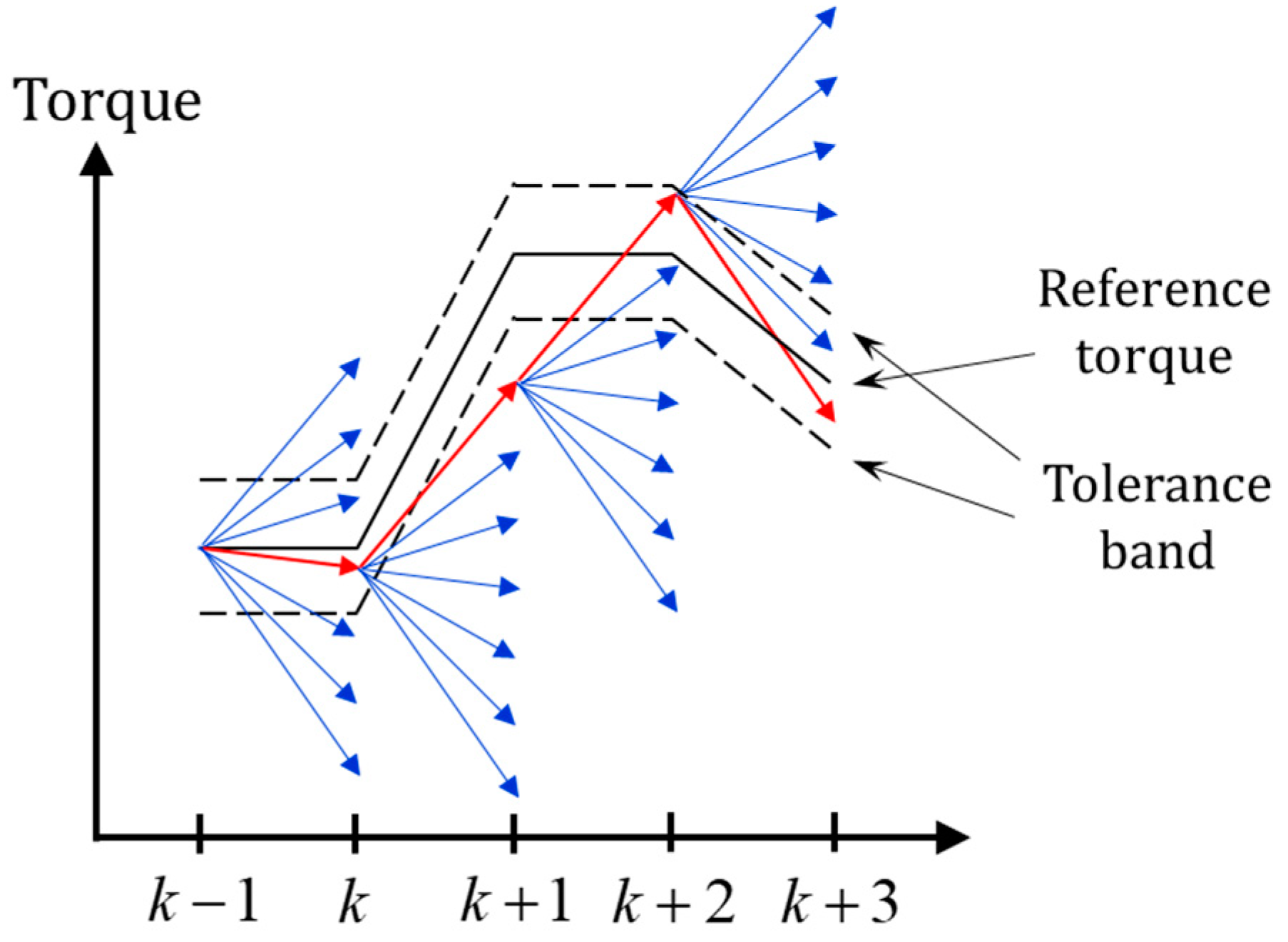
2.2. Choice of the Voltage Vector Considering One Step Delay
2.3. Compensation for the Torque Tracking Error
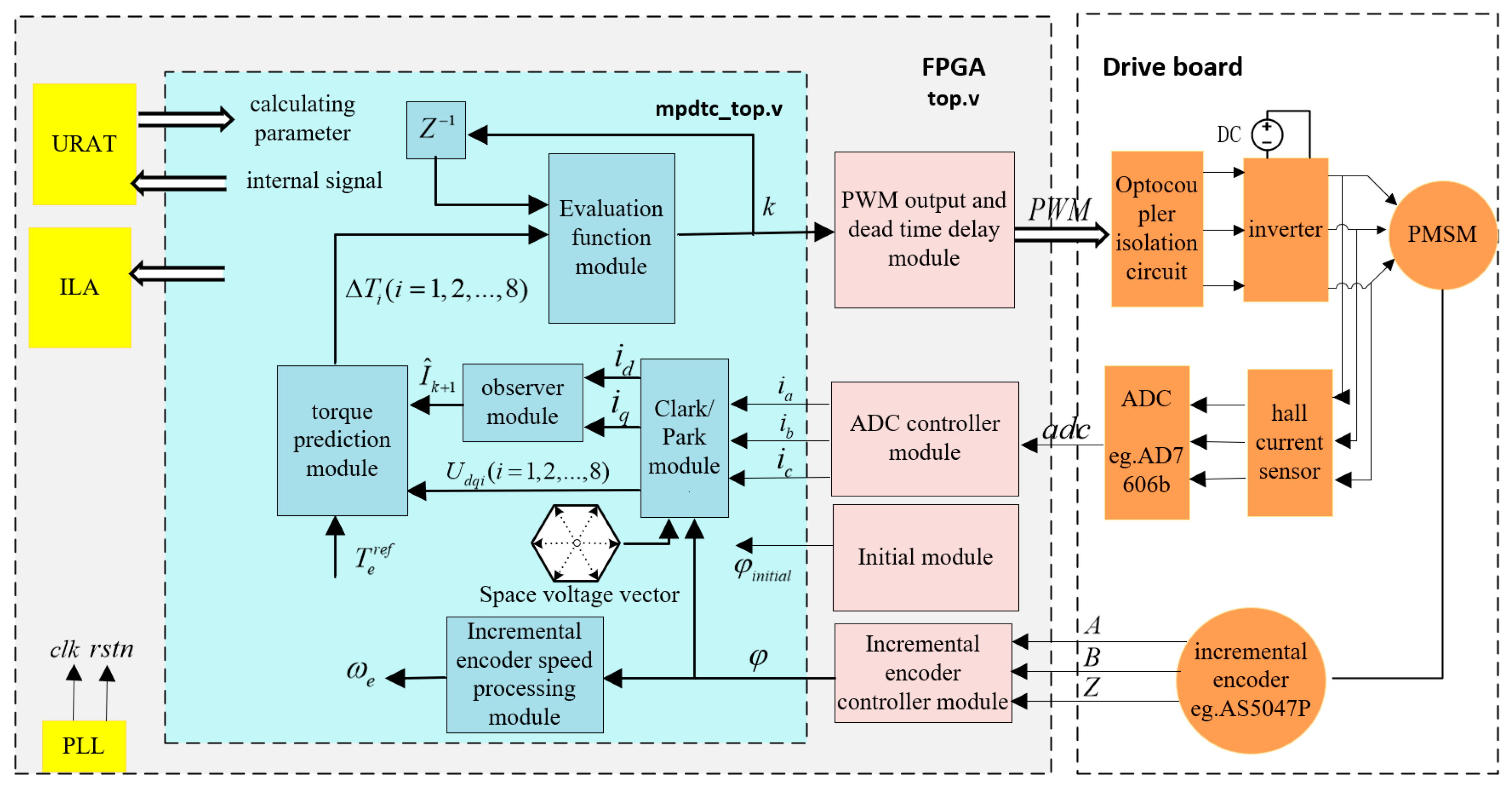
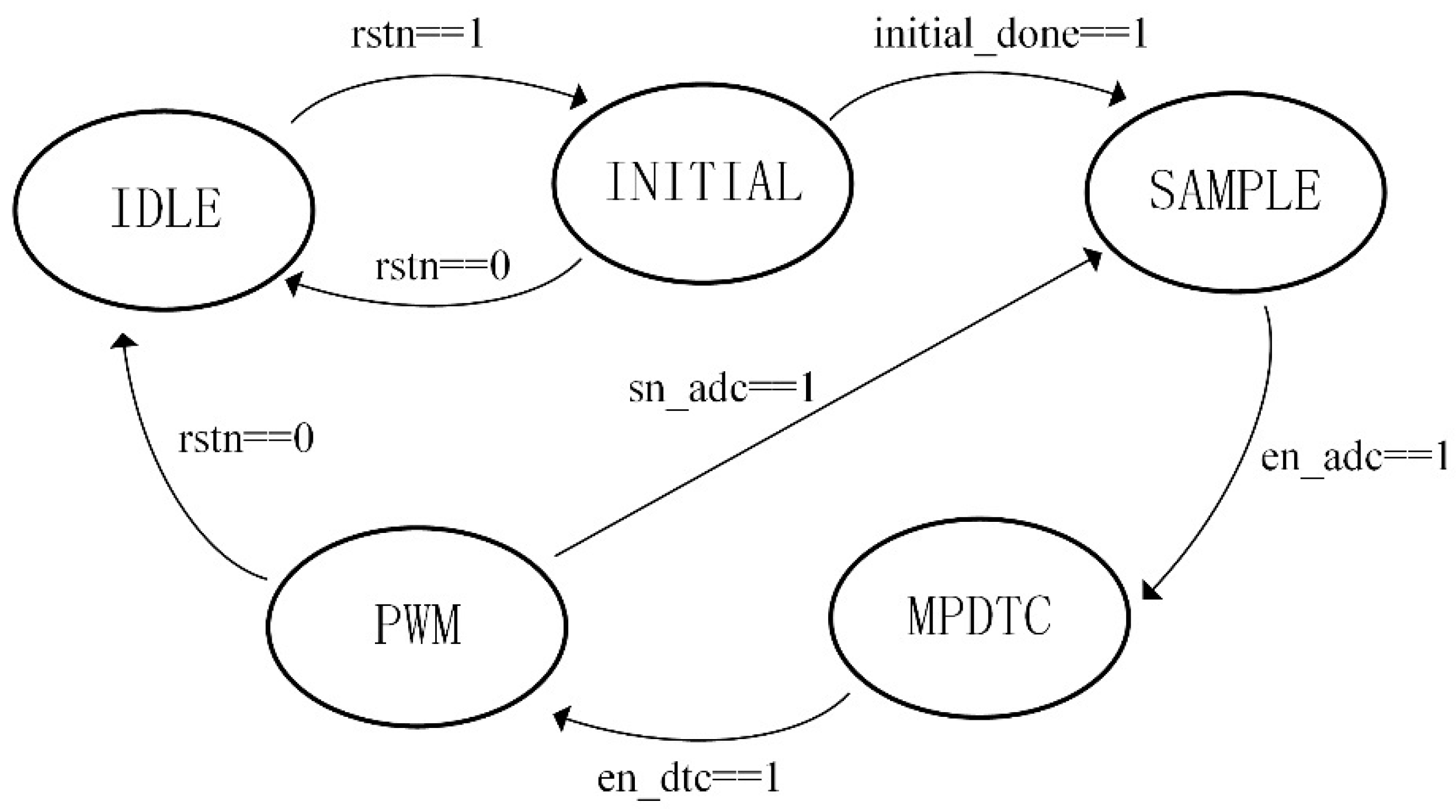
3. Implementation in FPGA
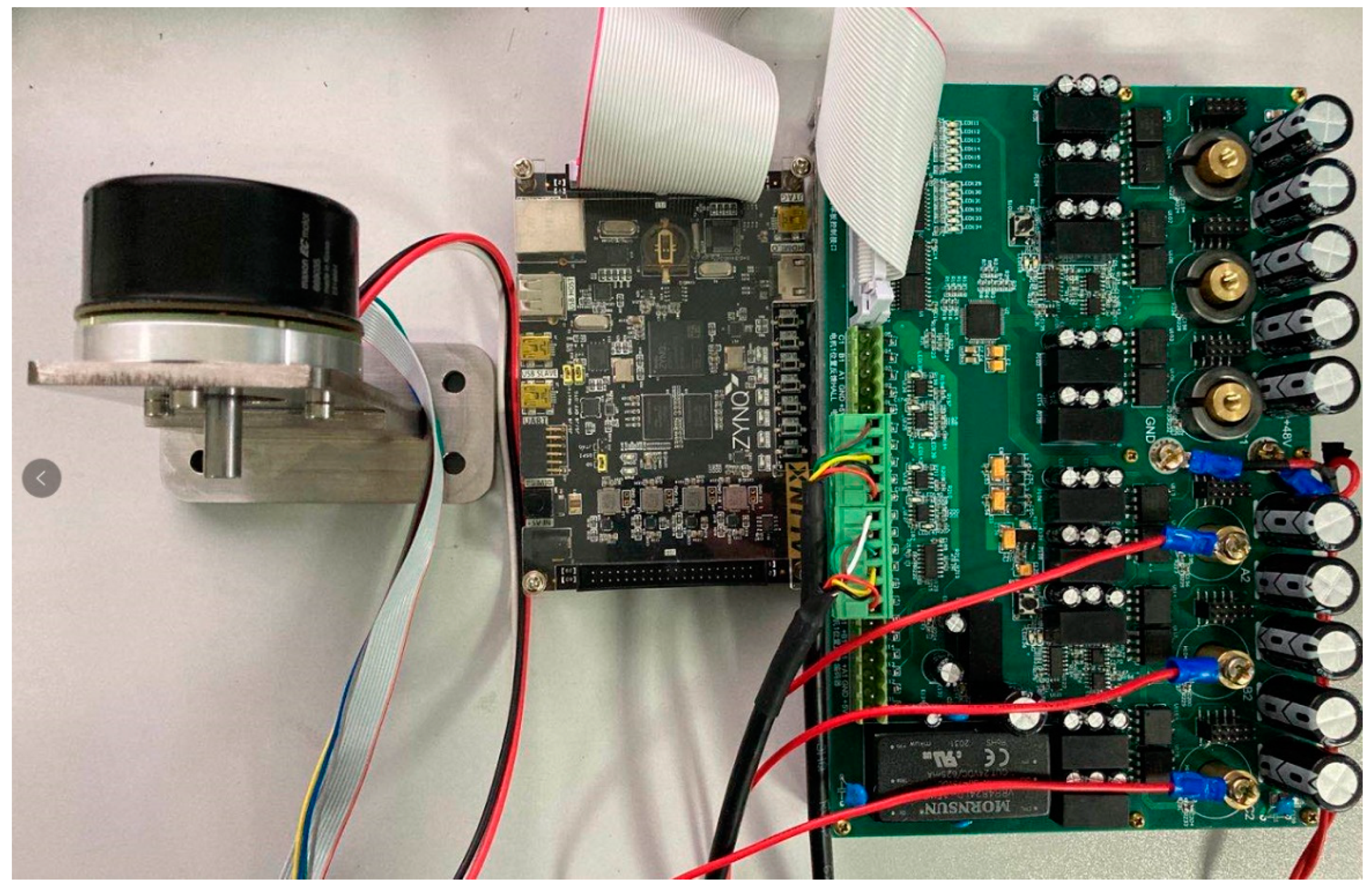
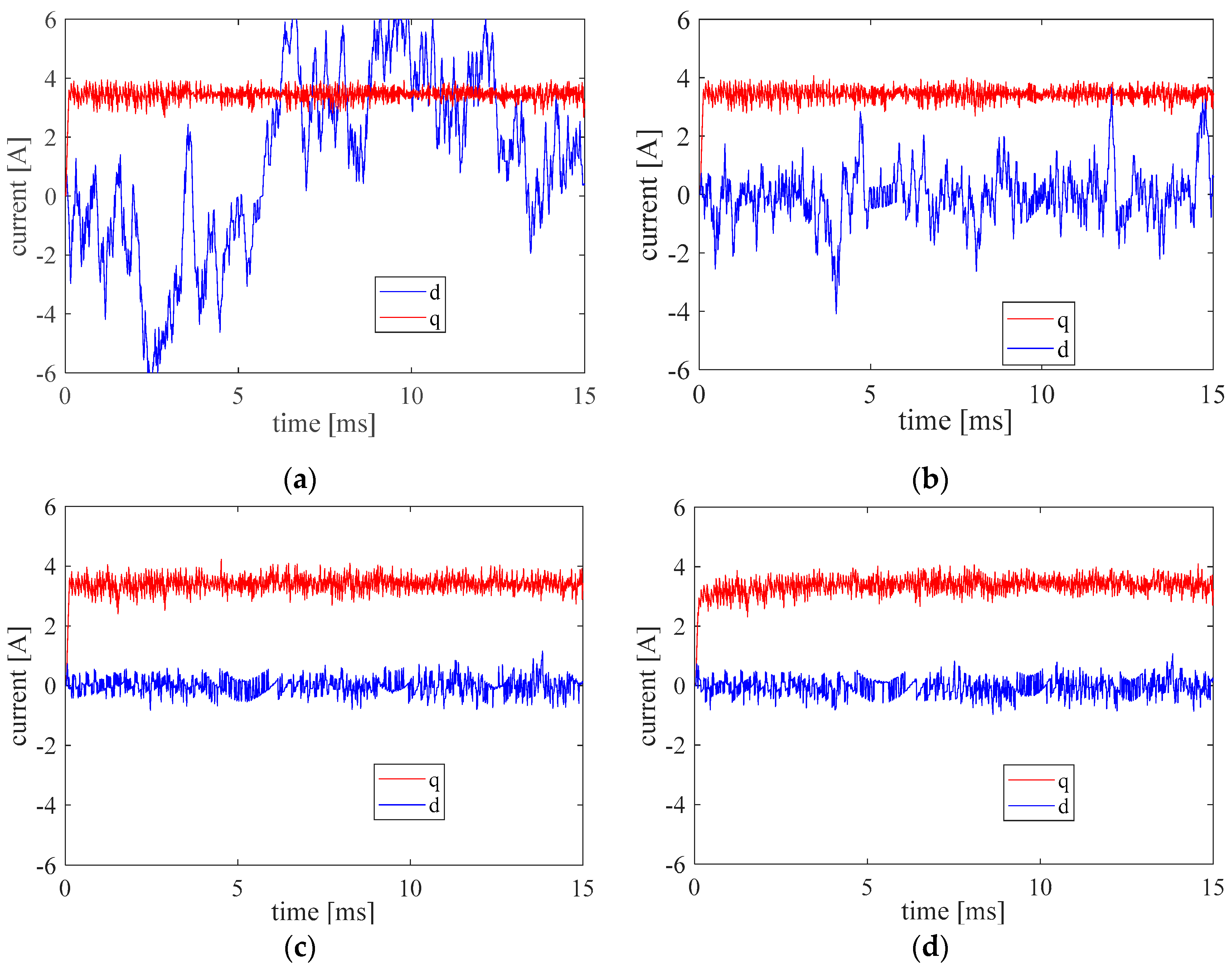
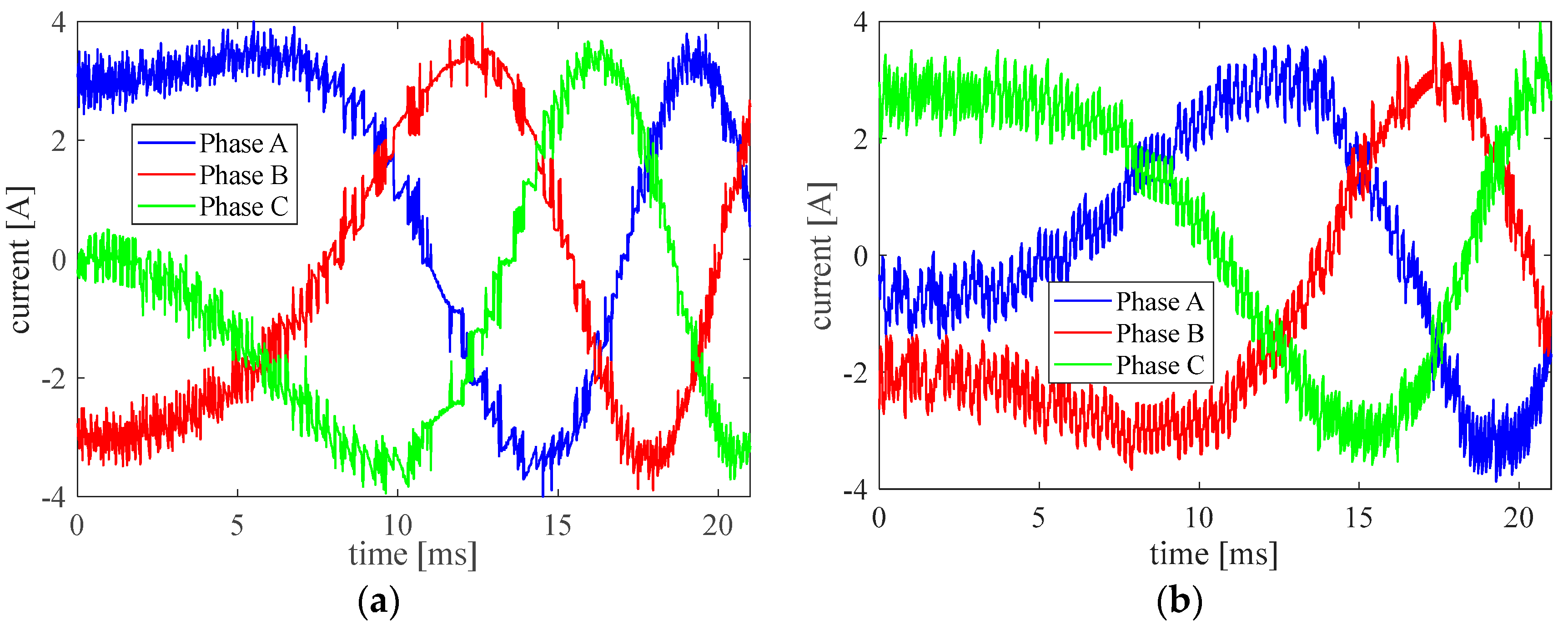
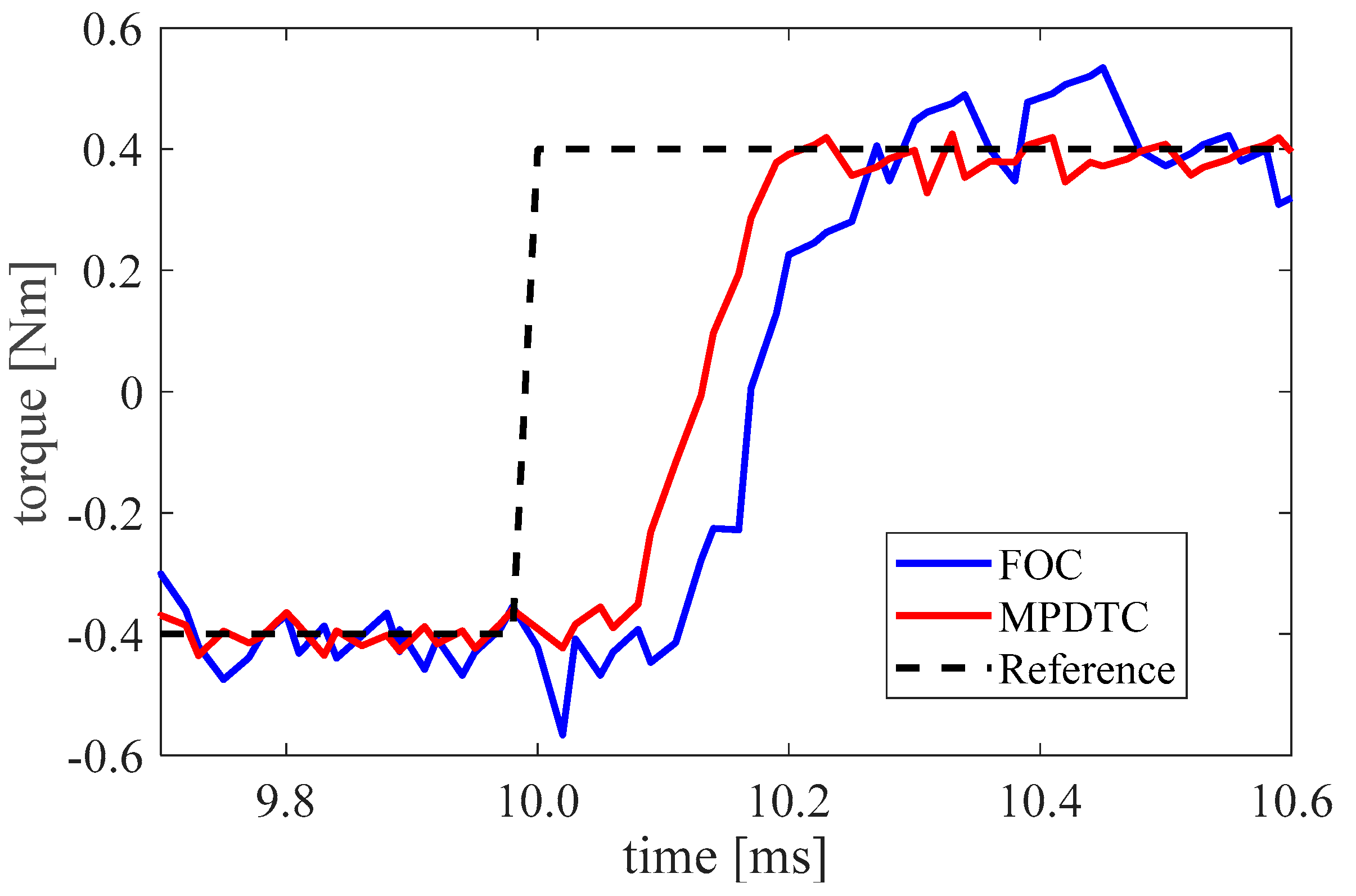
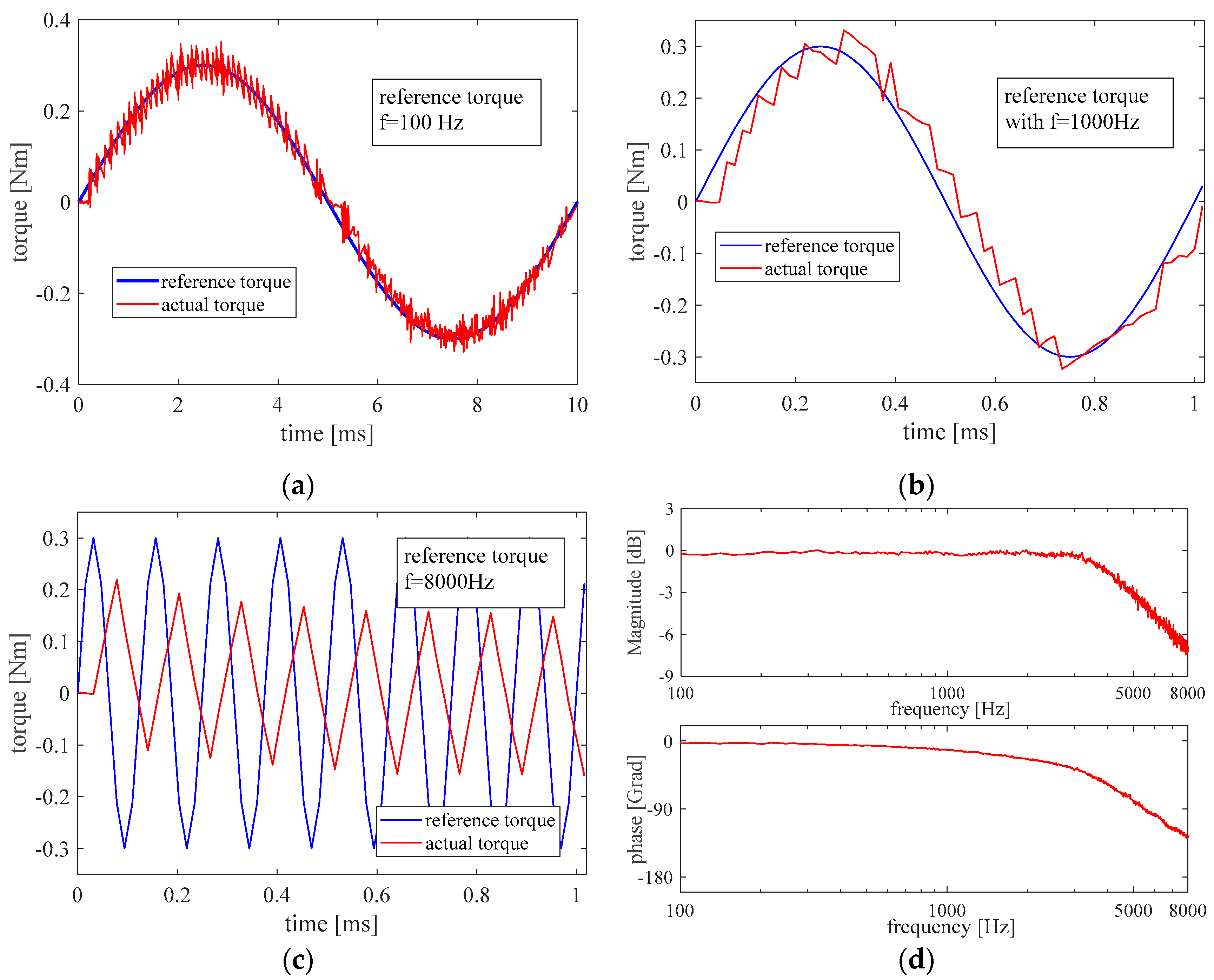
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hwangbo, J.; Lee, J.; Dosovitskiy, A.; Bellicoso, D.; Tsounis, V.; Koltun, V.; Hutter, M. Learning agile and dynamic motor skills for legged robots. Sci. Robot. 2019, 4, eaau5872. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839596. [Google Scholar] [CrossRef] [Green Version]
- Altintas, Y.; Verl, A.; Brecher, C.; Uriarte, L.; Pritschow, G. Machine tool feed drives. CIRP Ann. 2011, 60, 779–796. [Google Scholar] [CrossRef]
- Xu, H.; Chen, D.; Xue, F.; Li, X. Optimal Design Method of Interleaved Boost PFC for Improving Efficiency from Switching Frequency, Boost Inductor, and Output Voltage. IEEE Trans. Power Electron. 2019, 34, 6088–6107. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Model Predictive Direct Torque Control—Part I: Concept, Algorithm, and Analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Papafotiou, G.; Kley, J.; Papadopoulos, K.; Bohren, P.; Morari, M. Model Predictive Direct Torque Control—Part II: Implementation and Experimental Evaluation. IEEE Trans. Ind. Electron. 2009, 56, 1906–1915. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Geyer, T.; Beccuti, G.A.; Papafotiou, G.; Morari, M. Model Predictive Direct Torque Control of permanent magnet synchronous motors. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 199–206. [Google Scholar] [CrossRef]
- Vafaie, M.H.; Dehkordi, B.M.; Moallem, P.; Kiyoumarsi, A. A New Predictive Direct Torque Control Method for Improving Both Steady-State and Transient-State Operations of the PMSM. IEEE Trans. Power Electron. 2016, 31, 3738–3753. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model predictive torque control with duty ratio optimization for two-level inverter-fed induction motor drive. In Proceedings of the 2013 International Conference on Electrical Machines and Systems (ICEMS), Busan, Korea, 26–29 October 2013; pp. 2189–2194. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, B.; Zhou, Q. A model predictive current control method of PMSM based on the simultaneous optimization of voltage vector and duty cycle. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 881–884. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. An improved two-vectors-based model predictive torque control without weighting factors for induction motor drives. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 2766–2772. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized two-vectors-based model predictive torque control of induction motor drives. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 3570–3577. [Google Scholar] [CrossRef]
- Karamanakos, P.; Ayad, A.; Kennel, R. A Variable Switching Point Predictive Current Control Strategy for Quasi-Z-Source Inverters. IEEE Trans. Ind. Appl. 2017, 54, 1469–1480. [Google Scholar] [CrossRef]
- Karamanakos, P.; Stolze, P.; Kennel, R.M.; Manias, S.; Mouton, H.D.T. Variable Switching Point Predictive Torque Control of Induction Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 285–295. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, S.; Xia, C.; Wang, H.; Shi, T. Hybrid Control Set-Model Predictive Control for Field-Oriented Control of VSI-PMSM. IEEE Trans. Energy Convers. 2016, 31, 1622–1633. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Xie, W.; Wang, F.; Dou, M.; Kennel, R.M.; Lorenz, R.D.; Gerling, D. Deadbeat Model-Predictive Torque Control with Discrete Space-Vector Modulation for PMSM Drives. IEEE Trans. Ind. Electron. 2017, 64, 3537–3547. [Google Scholar] [CrossRef]
- Wang, T.; Liu, C.; Lei, G.; Guo, Y.; Zhu, J. Model predictive direct torque control of permanent magnet synchronous motors with extended set of voltage space vectors. IET Electr. Power Appl. 2017, 11, 1376–1382. [Google Scholar] [CrossRef]
- Zhou, Z.; Xia, C.; Yan, Y.; Wang, Z.; Shi, T. Torque Ripple Minimization of Predictive Torque Control for PMSM with Extended Control Set. IEEE Trans. Ind. Electron. 2017, 64, 6930–6939. [Google Scholar] [CrossRef]
- Baidya, R.; Aguilera, R.P.; Acuna, P.; Vazquez, S.; Mouton, H.D.T. Multistep Model Predictive Control for Cascaded H-Bridge Inverters: Formulation and Analysis. IEEE Trans. Power Electron. 2018, 33, 876–886. [Google Scholar] [CrossRef] [Green Version]
- Habibullah, M.; Lu, D.D.-C.; Xiao, D.; Rahman, M.F. Finite-State Predictive Torque Control of Induction Motor Supplied from a Three-Level NPC Voltage Source Inverter. IEEE Trans. Power Electron. 2017, 32, 479–489. [Google Scholar] [CrossRef]
- Kim, I.; Chan, R.; Kwak, S. Model predictive control method for CHB multi-level inverter with reduced calculation complexity and fast dynamics. IET Electr. Power Appl. 2017, 11, 784–792. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rodriguez, J. Simplified Finite Control Set-Model Predictive Control for Matrix Converter-Fed PMSM Drives. IEEE Trans. Power Electron. 2018, 33, 2438–2446. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.-C. Switching Strategy Based on Model Predictive Control of VSI to Obtain High Efficiency and Balanced Loss Distribution. IEEE Trans. Power Electron. 2014, 29, 4551–4567. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sk+1 | 000 | 001 | 010 | 011 | 100 | 101 | 110 | 111 | |
| Sk | |||||||||
| 000 | 1 | 2 | 2 | 4 | 2 | 4 | 4 | 8 | |
| 001 | 2 | 1 | 4 | 2 | 4 | 2 | 8 | 4 | |
| 010 | 2 | 4 | 1 | 2 | 4 | 8 | 2 | 4 | |
| 011 | 4 | 2 | 2 | 1 | 8 | 4 | 4 | 2 | |
| 100 | 2 | 4 | 4 | 8 | 1 | 2 | 2 | 4 | |
| 101 | 4 | 2 | 8 | 4 | 2 | 1 | 4 | 2 | |
| 110 | 4 | 8 | 2 | 4 | 2 | 4 | 1 | 2 | |
| 111 | 8 | 4 | 4 | 2 | 4 | 2 | 2 | 1 | |
| Description | Value | Unit |
|---|---|---|
| Terminal resistance | 1.11 | Ω |
| Terminal inductace | 1.28 | mH |
| Torque constant | 113 | mNm/A |
| Speed constant | 84.8 | rpm/V |
| Rotor inertia | 810 | gcm2 |
| Nominal voltage | 48 | V |
| 0.02 | 0.04 | 0.08 | 0.12 | |
|---|---|---|---|---|
| [A] | 7.89 | 4.28 | 1.05 | 1.07 |
| Settling time of[ms] | 0.12 | 0.12 | 0.18 | 0.38 |
| 0.02 | 0.1 | 0.15 | 0.2 | |
|---|---|---|---|---|
| [A] | 1.07 | 1.06 | 2.02 | 4.13 |
| Average[kHz] | 16.7 | 14.0 | 12.7 | 9.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Xu, Y.; Ma, Z.; Xu, J.; Zhang, T.; Xu, M.; Mei, X. Field Programmable Gate Array Based Torque Predictive Control for Permanent Magnet Servo Motors. Micromachines 2022, 13, 1055. https://doi.org/10.3390/mi13071055
Sun Z, Xu Y, Ma Z, Xu J, Zhang T, Xu M, Mei X. Field Programmable Gate Array Based Torque Predictive Control for Permanent Magnet Servo Motors. Micromachines. 2022; 13(7):1055. https://doi.org/10.3390/mi13071055
Chicago/Turabian StyleSun, Zheng, Yikun Xu, Zhipeng Ma, Jun Xu, Tao Zhang, Muxun Xu, and Xuesong Mei. 2022. "Field Programmable Gate Array Based Torque Predictive Control for Permanent Magnet Servo Motors" Micromachines 13, no. 7: 1055. https://doi.org/10.3390/mi13071055