1. Introduction
Inspired by bionics, many bionic robots have been developed, including bionic insect microrobot and medical microrobot, bionic humanoid robot, and so on. These types of robots usually have multiple modes of locomotion called multi-locomotion robot (MLR). This kind of robot has a broad prospect in a special work environment, such as pipeline maintenance, drugs transportation inside of human body, terrain exploration, and so on. The authors of [
1] designed a humanoid robot system which supports bipedal or quadrupedal walking, climbing, brachiation, and even flying. The algorithm proposed in this paper is mainly based on this kind of robot, but the idea of this algorithm is also applicable to other kinds of MLRs. In the related studies, researchers realized bipedal walking on the flat ground [
2,
3], quadruped walking on the slope [
4], swinging on the ladder [
5,
6,
7], and climbing a vertical ladder [
8]. In [
2], the researchers proposed the 3-D biped dynamic walking algorithm based on the PDAC, and validated the performance and the energy efficiency of the proposed algorithm. In [
4], the researchers determined an optimal structure for a quadruped robot to minimize the robot’s joint torque sum. In [
5], the researchers presented a control method to realize smooth continuous brachiation. The authors of [
6] proposed an energy-based control method to improve the stability of continuous brachiation. The authors of [
7] designed a type of brachiation robot with three links and two grippers, and designed a control method based on sliding-mode control, which improved the robustness and swing efficiency of the robot. In [
8], the researchers introduced a vertical ladder climbing algorithm of the MLR only by the posture control without any external sensors.
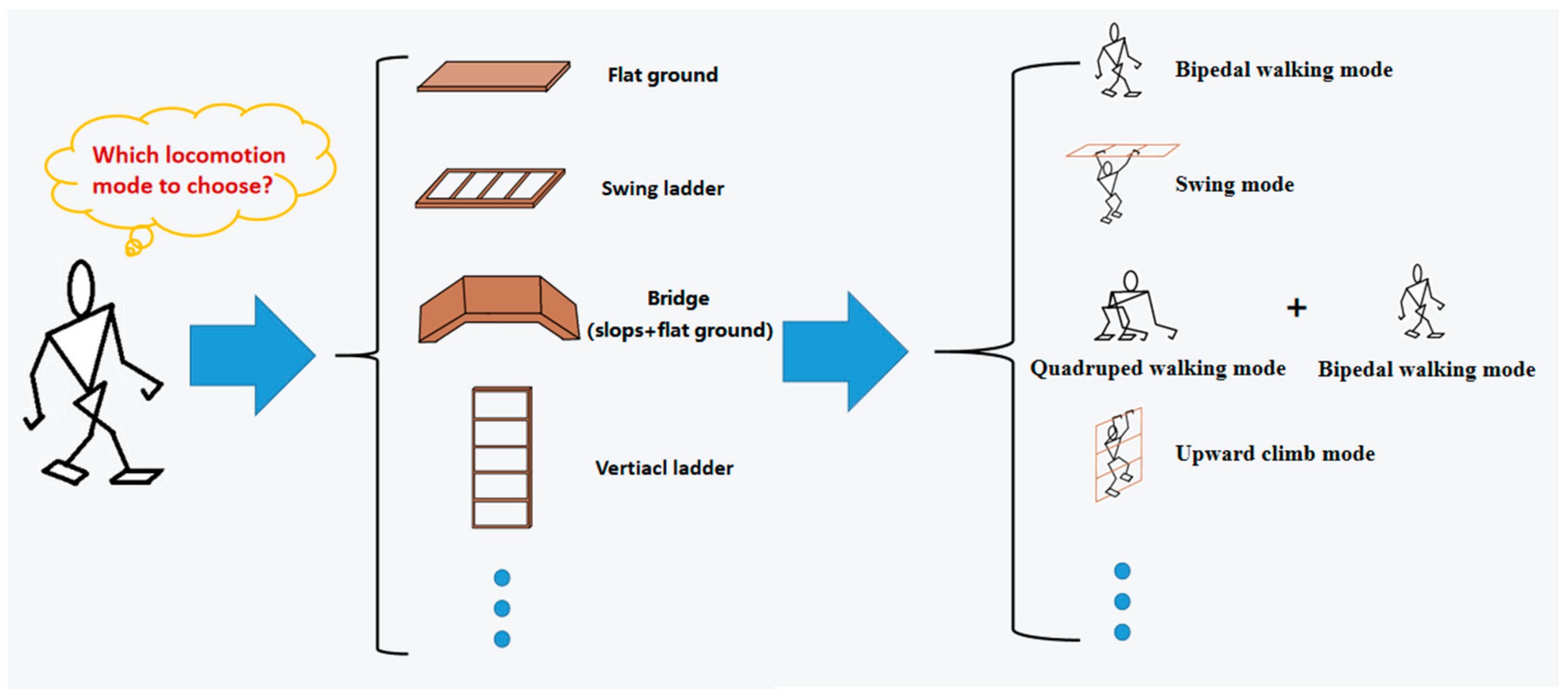
With the diversification of robot locomotion mode, the application environment of robots has also expanded from the laboratory to the field environment. Due to its high adaptability to the environment, the MLR should choose different locomotion modes according to the obstacles it faces, as shown in
Figure 1.
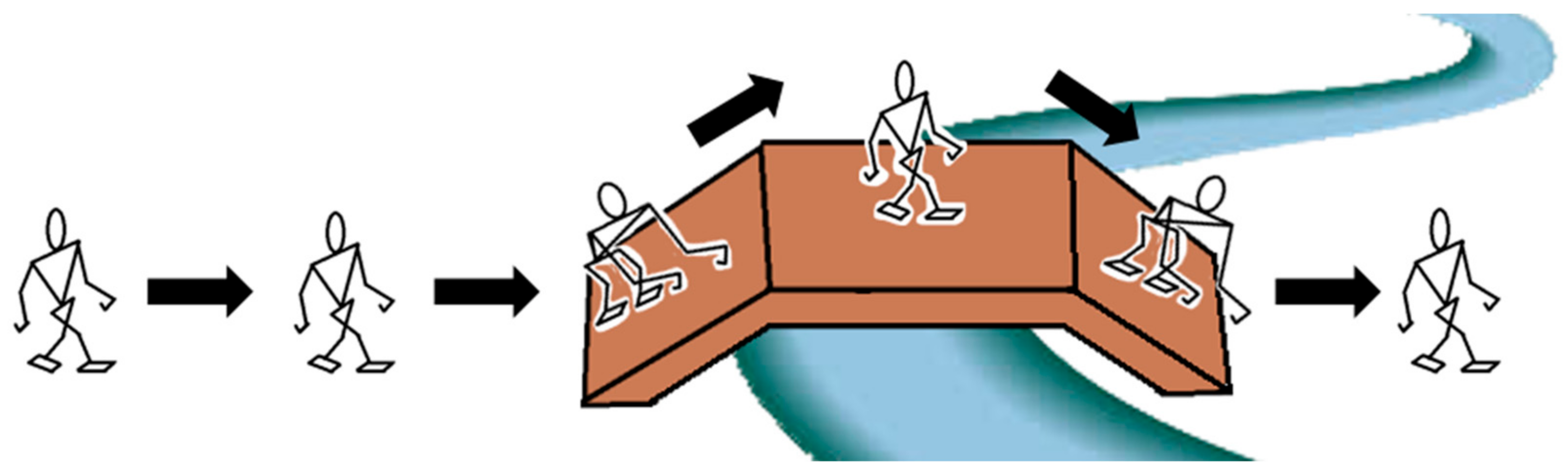
So, multi-locomotion robots can pass obstacles that single locomotion robots could not pass safely in the past by switching locomotion modes. For example, as shown in
Figure 2, there is a little bridge above a river, the MLR will choose to switch its locomotion mode from bipedal walking to quadrupedal walking, to go on the slope, and go through the bridge with minimal probability of falling down. For a normal biped robot, walking on the slope of the small bridge in the bipedal way, there will be a high probability of falling down.
Therefore, in the same field environment, the number of possible paths for MLR is greatly increased compared with robots with single locomotion mode. How to choose among many possible paths is a problem to be solved.
Different locomotion modes, such as bipedal and quadrupedal walking, have specific and different capabilities because a robot’s mobility is constrained by the physical and structural conditions for a motion [
9]. For example, bipedal walking means low power consumption but is prone to falling down according to [
2,
10,
11]; so, it is suitable to go over flat ground; quadrupedal walking is suitable to climb a slope because of its high stability, but its speed is rather slow [
4,
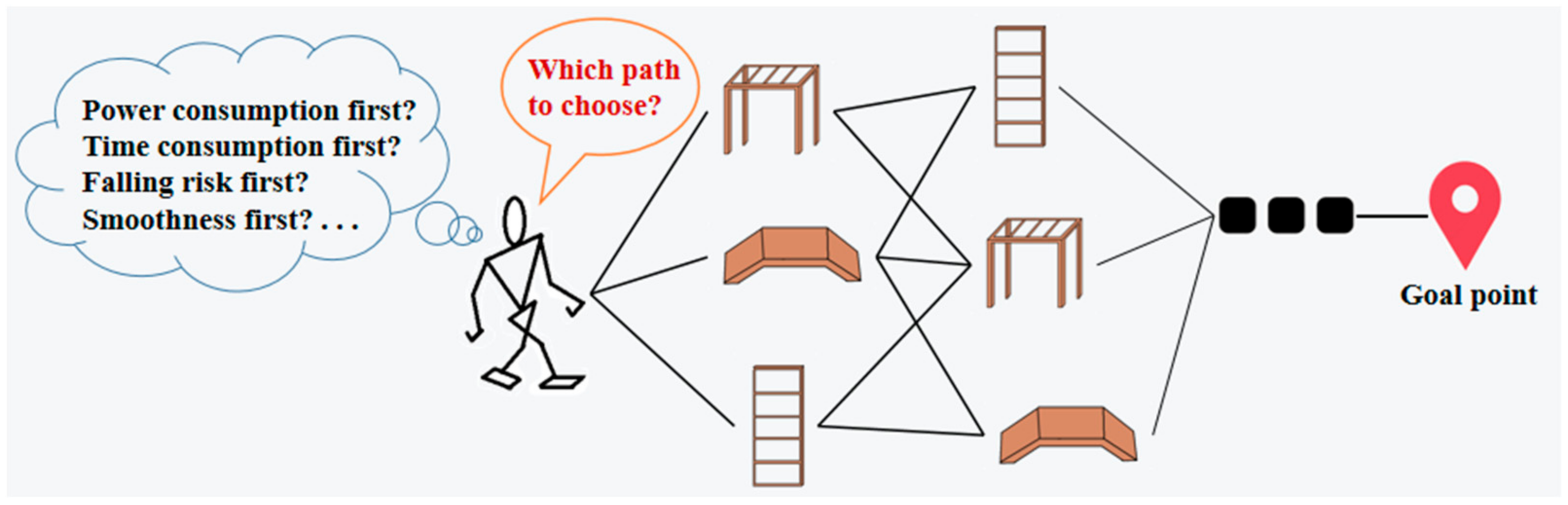
12]. Thus, it is necessary to take power consumption, time consumption, and falling risk all into consideration in path planning, as shown in
Figure 3. These three goals are normally mutually exclusive; so, the path planning problem is a multi-objective optimization problem.
Many researchers have proposed path planning algorithms for multi-objective optimization, including multi-objective path planning based on the genetic algorithm [
13,
14], multi-objective path planning based on the particle-swarm optimization algorithm (PSO) [
15,
16,
17], and multi-objective ant colony algorithm path planning [
18].
In [
19], inspired by the frogs’ behavior, the researchers proposed a multi-objective shuffled frog-leaping path planning algorithm. This algorithm has three objectives: path safety, path length, and path smoothness. In this research, the optimization method of path safety was realized by ensuring the distance between path and obstacle. When the path generated by the algorithm passes through the obstacle, the path safety operator will look for two candidate regions in the vertical direction of this section of the path crossing the obstacle, and determines the new path node according to the vertical distance between the candidate regions and this section of the path in order to generate two new path sections, to avoid passing through the obstacle.
In [
20], in order to solve the problem of multi-objective optimization in the global path planning of autonomous intelligent patrol vehicle, which is the shortest path length and the smallest total angle change in the path, the researchers proposed a path planning method based on a multi-objective Cauchy mutation cat-swarm optimization algorithm. The multi-objective problem proposed in this algorithm only considered the path length and path smoothness; thus, the practicability is limited.
In [
21], the researchers proposed an improved ant colony optimization-based algorithm for user-centric multi-objective path planning for ubiquitous environments. This algorithm uses the ant colony algorithm to plan a path for vehicle navigation in an urban map considering length, traffic condition, and power consumption; the traffic condition in this research is very similar to the path safety, which provides a reference for considering the path safety in our research.
In [
22], the researchers proposed an aging-based ant colony optimization algorithm. The researchers introduced a modification based on the age of the ant into the standard ant colony optimization. This algorithm can find the shortest and the most free-collision path under static or dynamic environment, and, when compared with other traditional algorithms, it proves its superiority. However, path safety is not considered in this algorithm.
In [
23], the researchers proposed a multi-objective path planning algorithm based on an adaptive genetic algorithm. In this algorithm, the self-defined genetic operator is used to realize the optimization of the path length and smoothness, and the artificial potential field theory is introduced to realize the planning of the path safety which inspired our research in the optimization of path safety. However, the path safety mentioned in this algorithm only considers the distance between the robot and the impassable obstacle, and does not involve road conditions and the locomotion mode of the robot.
In [
24], the researchers proposed a multi-objective genetic algorithm path planning method for reconfigurable robots. This kind of robots can provide high dexterity and complex actions by reconfiguring its shape. This method proposed four objective functions: goal reachability, time consumption, path smoothness, and path safety. Even the reconfigurable robots can provide different shapes to move, but the path safety considered in this method only considered the distance between robots and obstacles rather than considering the falling risk of a robot in different shapes.
In [
25], the researchers proposed a multi-objective path planning algorithm for mobile robot, this algorithm has three objectives: length, smoothness and safety. The applicable environment of this algorithm is relatively simple, the environment was only divided into passable and impassable, and the safety optimization only considers the distance between the robot and the obstacles.
In [
26], the researchers proposed a path planning method based on interval multi-objective PSO; this method concentrates on three objectives: path time, path safety, and path length. In the optimization of path safety, this method takes the road condition into consideration, which has enlightening values to our works, but the applied objects of these methods are traditional wheeled robots; so, this method is not suitable for MLR.
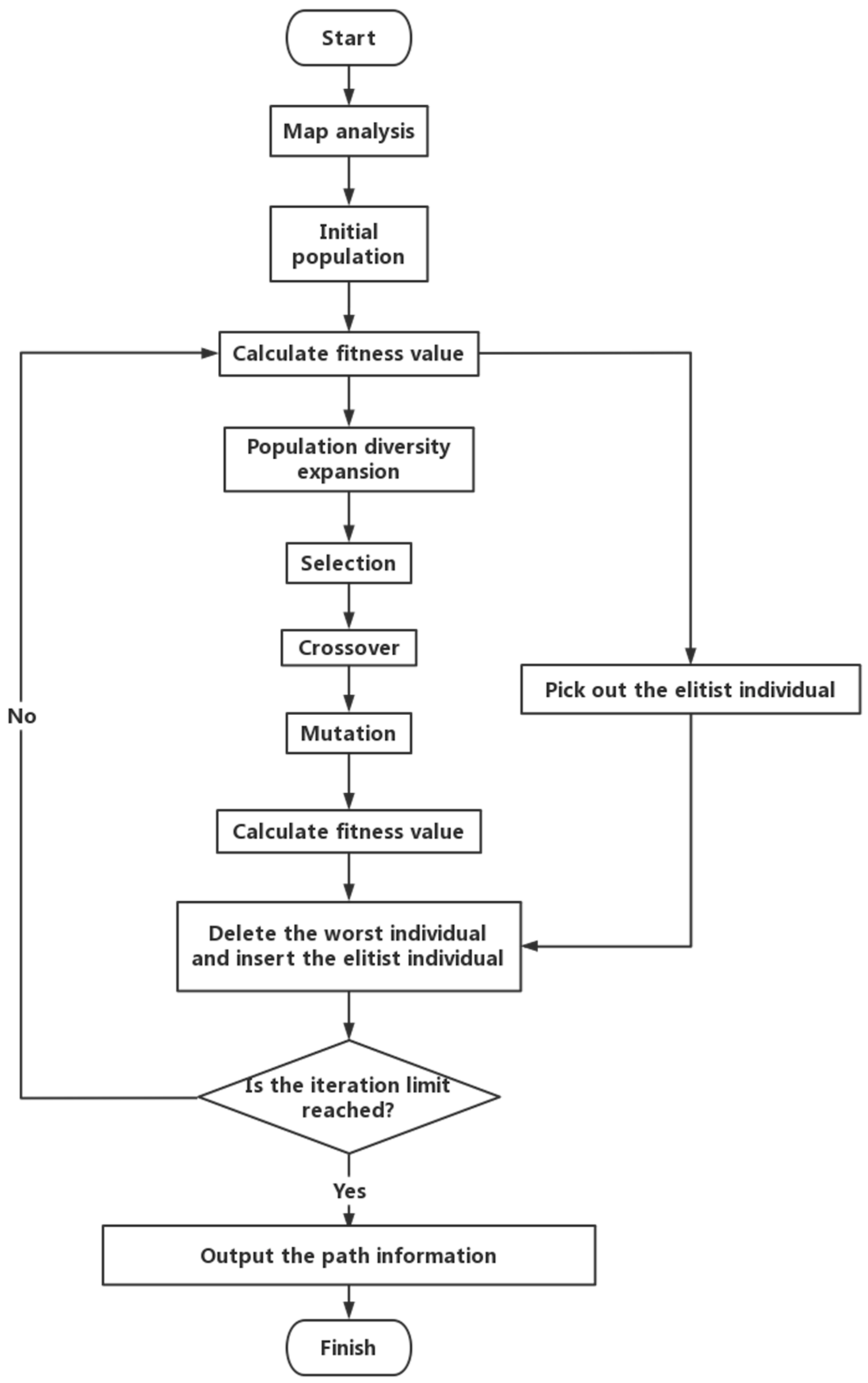
Based on the path planning research described above, and taking the high adaptability to the complex environment of MLR into consideration, a path planning algorithm for multi-locomotion robot (MLR) based on multi-objective genetic algorithm with elitist strategy (MLRMOEGA) is proposed in this paper. The algorithm considers the power consumption, moving speed, and falling risk of the MLR in different locomotion modes and different environment, and proposes four optimization objective functions: power consumption, time consumption, path falling risk, and path smoothness. Compared with previous studies, optimal safety mostly refers to the distance between the robot and the obstacle. This paper proposes the concept of robot global path falling risk, that is, when the MLR is moving through alternative locomotion modes, there will be a certain falling risk, so there will be a falling risk of each possible path. We calculate the falling risk of each path, and take it into the multi-objective problem to be considered. To solve the problem of premature convergence of the Genetic Algorithm, we propose two operators: a map analysis operator and a population diversity expansion operator, to improve the population diversity in the algorithm process.
The rest of this paper is organized as follows:
Section 2 is the introduction of the environment building method and the problem statement.
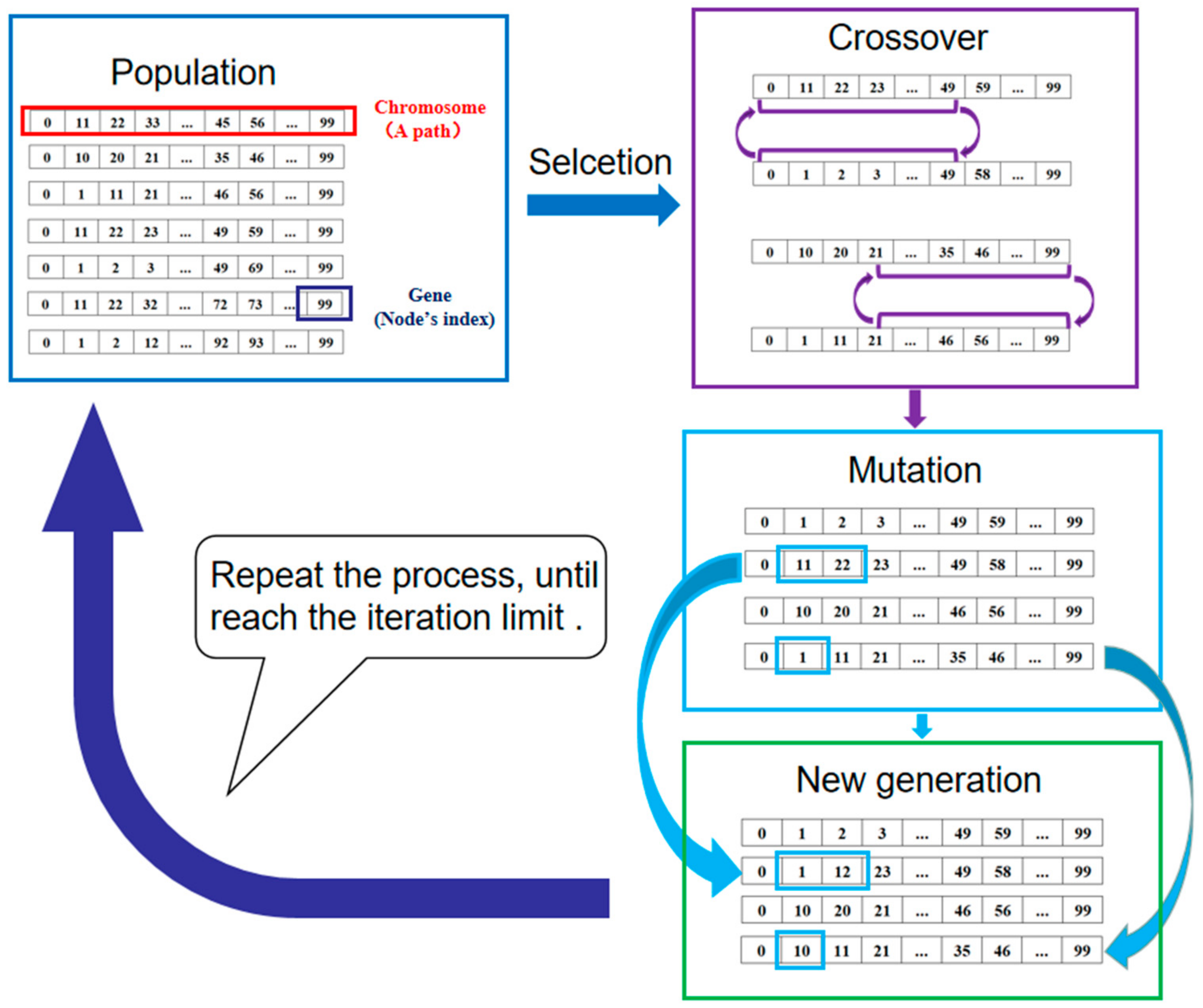
Section 3 is the introduction of the Genetic Algorithm and the proposed algorithm.
Section 4 is the implementation of the multi-objective path planning including building global environment and details of the algorithm.
Section 5 is simulation experiment.
Section 6 is the conclusion.
2. Problem Statement and Preliminaries
2.1. Method of Building the Global Path Planning Environment
The path planning of a robot is divided into two steps: first, abstract out a global map containing real environment information, then, execute the path planning algorithm and the path will be generated.
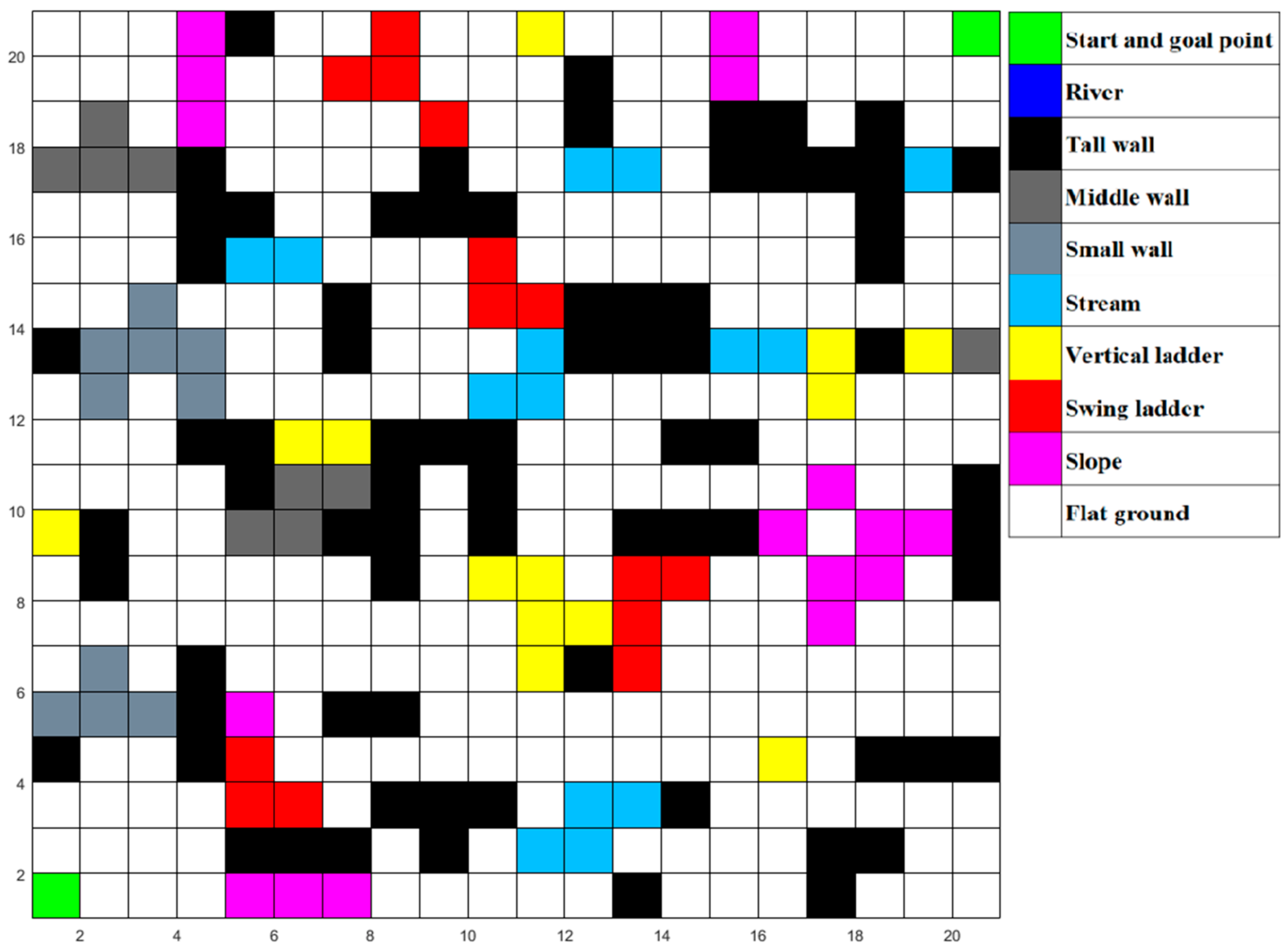
In this paper, we map the environment on a grid of size
n ×
n, where the grid size
n is decided depending on the accuracy required in the path planning problem [
27]; the bigger
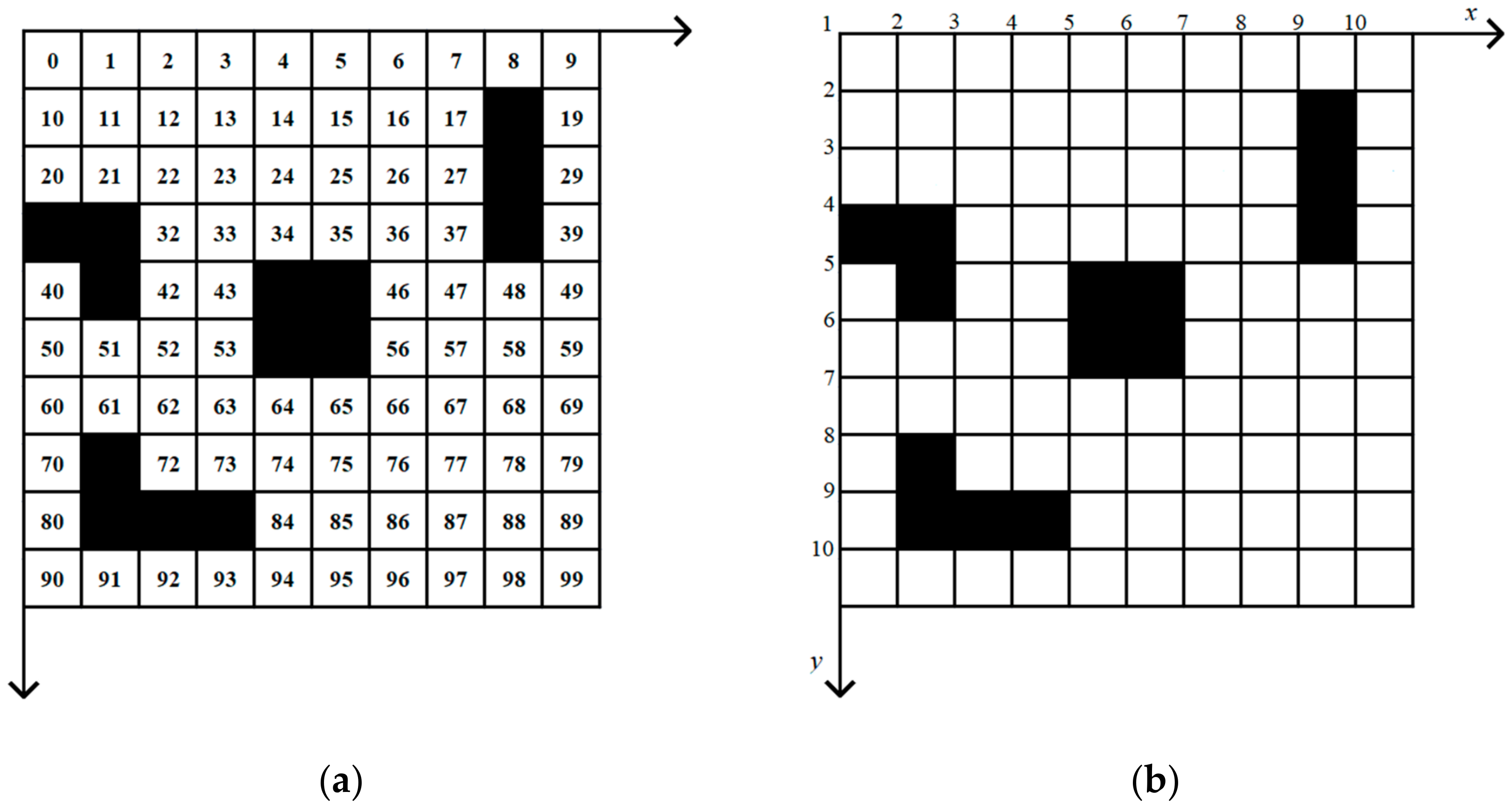
n is, the more accurate the map will be. Each grid of the map contains environmental information of its location. There is an example of a 10 × 10 grid map, as shown in
Figure 4, in this example, black grids represent impassable obstacles, white grids are traversable. The position of each grid can be obtained by index or coordinate values, which can be converted to each other as Equation (1):
In this equation, ind is the index value of gird, A is the size of the grid map, ⌊⌋ means to round down the value to the closest integer, % means to take the remainder as the result.
2.2. Optimization Objective Functions
This paper proposes four optimization objectives for MLR: power consumption, time consumption, path falling risk, and path smoothness.
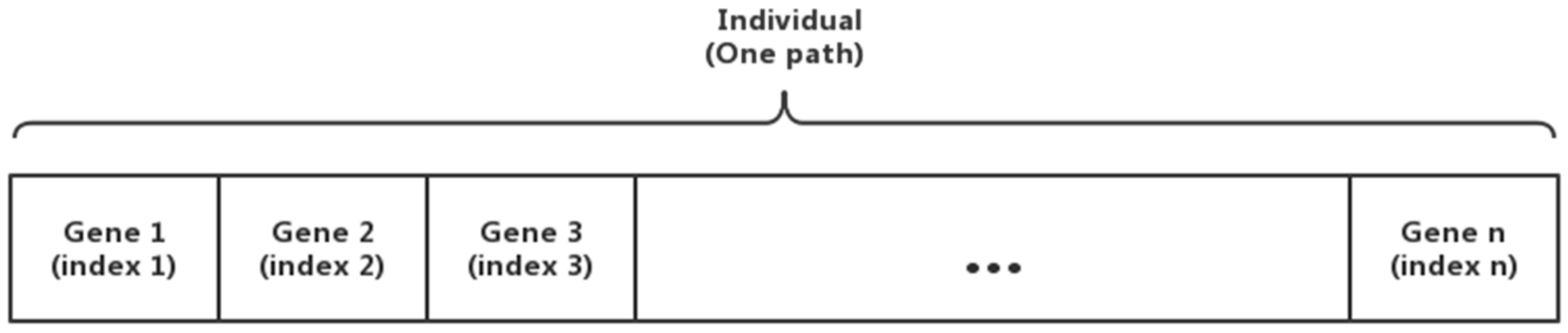
One path consists of many grid cells from the grid map and we call them nodes of paths, and we divide one path into several sections. We call them path sections based on the locomotion modes that the MLR takes.
di is the Euclidean distance of each path section as shown in Equation (2) [
23]:
In this equation, i is the number of this path section; j is the node number in this section; J is the total number of nodes in this section; A is the size of the grid map.
Power consumption: In order to pass different road conditions, the MLR will choose alternative locomotion modes with different power consumption. In the real environment, the energy stored by the MLR itself is very limited, which greatly restricts the activity duration of the MLR. Therefore, it is very necessary to include power consumption into the optimization objective in path planning. The power consumption is calculated by Equation (3):
In this equation, is a vector that consists of the nodes’ coordinate of one path; Ci is the power consumption of different path sections with different locomotion modes; N is the total path section count of this path.
- 2.
Time consumption: Different locomotion modes bring different time consumption. We expect MLR to perform time-sensitive tasks, such as terrain detection, material transport, rescue and so on; so, time consumption must also be considered in path planning. It is calculated by Equation (4):
Si represents the moving speed of the MLR in this path section with one locomotion mode; i, N, and represent the same quantities as in Equation (3).
- 3.
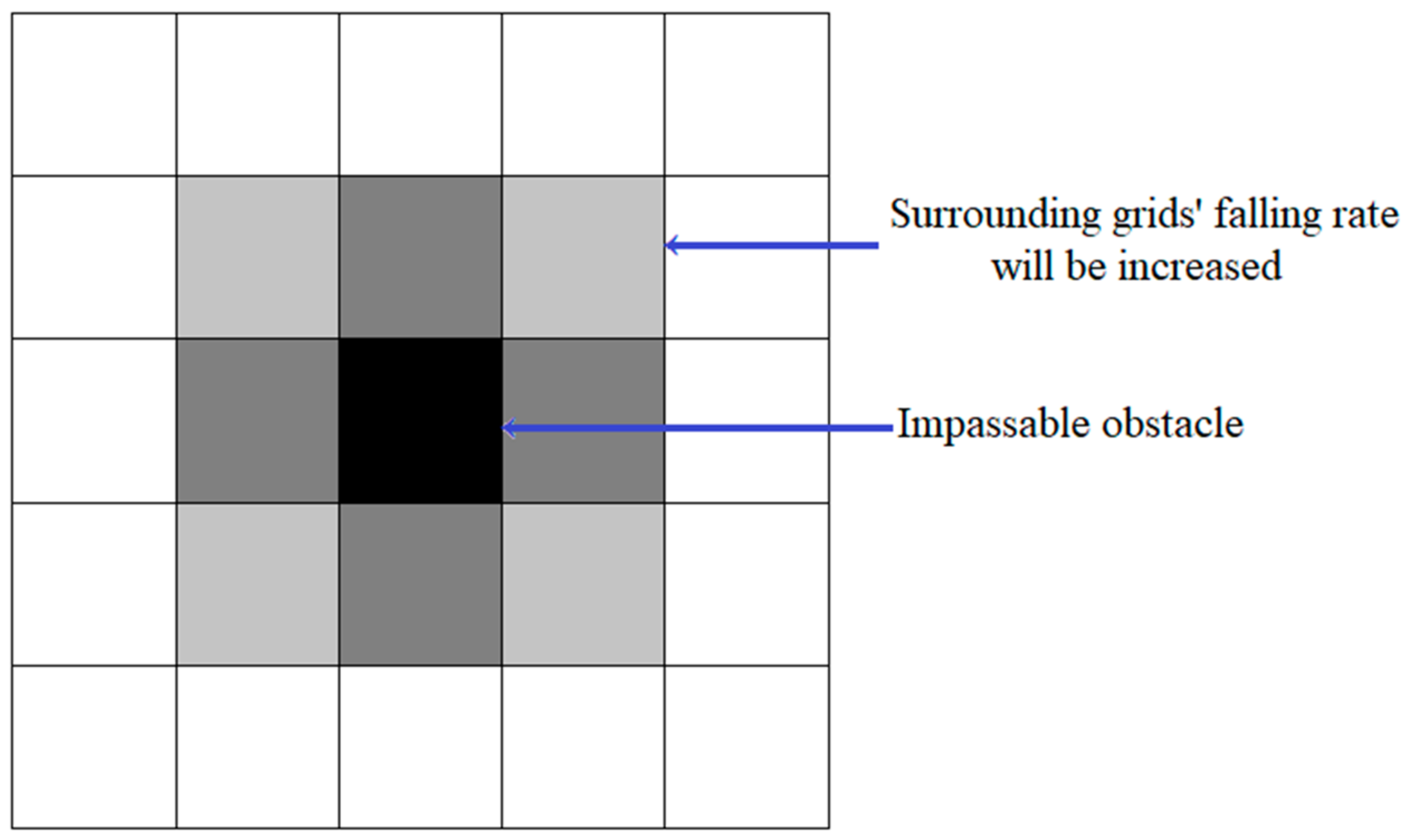
Path falling risk: Different locomotion modes not only affect the power consumption and time consumption of one path, but also the falling risk. Compared with ordinary wheeled mobile robots, the locomotion modes of MLR have higher risk of falling, and its design is aimed at a more complex field environment; so, it is also important to ensure that the falling risk of MLR in the process of moving is within an acceptable range. In addition to considering the falling risk of the MLR in different locomotion modes, the condition when the MLR is too close to an impassable obstacle should also be taken into consideration; so, we refer to the theory of artificial potential field [
28] and transform the diffusion of the potential field into the influence on the falling risk of surrounding girds. When one grid in the map represents an impassable obstacle, the falling risk of the eight surrounding grids will be increased, as shown in
Figure 5.
We define the influence of impassable obstacles on the surrounding grid as shown in Equation (5):
In this Equation, represents the falling risk of surrounding girds of the impassable obstacle; represents the falling risk of the grids when there is no impassable obstacle around; D is the Euclidean distance between the impassable obstacle and the surrounding grids; xip, yip are the coordinates of the impassable obstacle; xsg, ysg are the coordinates of the surrounding girds.
We assume that whether the MLR falls or not is independent of the path at any different nodes and we calculate the falling risk with Equation (6):
k is the count of node in an individual. n is the total node count in an individual. Pk(f) is the falling risk when the MLR passes one node.
- 4.
Path smoothness: We want the path generated by the algorithm to be as smooth as possible, and we define the sum of all the angles in the path as the smoothness of that path. The smoothness of a path is calculated by Equation (7) [
23]:
In this Equation: , , , k is the count of node in one path, T is the total number of turns in one path.
- 5.
The synthetic objective function: We synthesize the above four objective functions and linearly weighted them as the final objective function. As shown in Equation (8) [
23]:
In this equation, cw is the power consumption weight, tw is the time consumption weight, rw is the falling risk weight, and aw is the smoothness weight. The weight values are determined by decision makers through experience or practical requirements; they represent the importance that decision-makers attach to different objective functions. The higher a weight value is, the more attention it receives in multi-objective optimization problems.
6. Conclusions
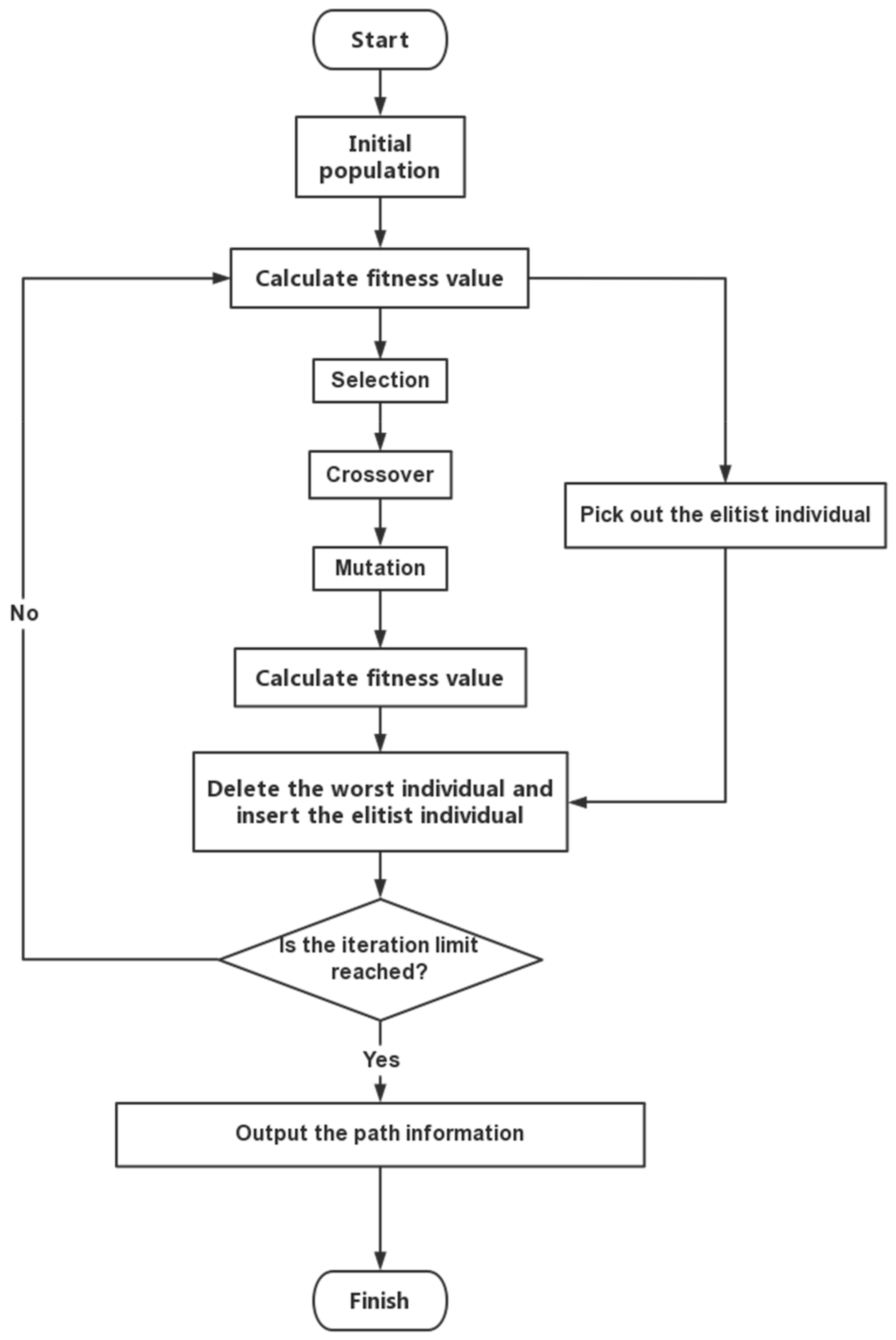
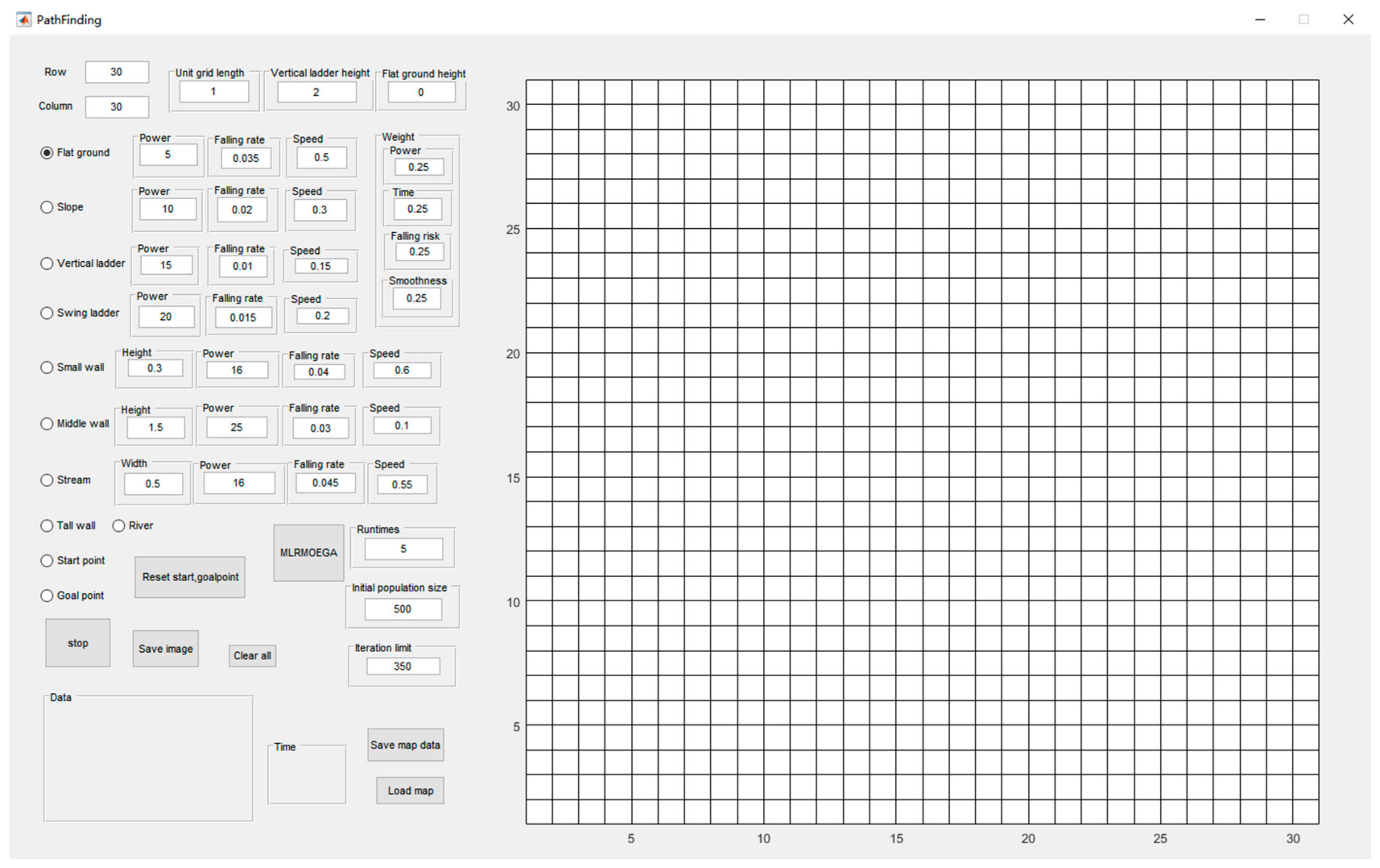
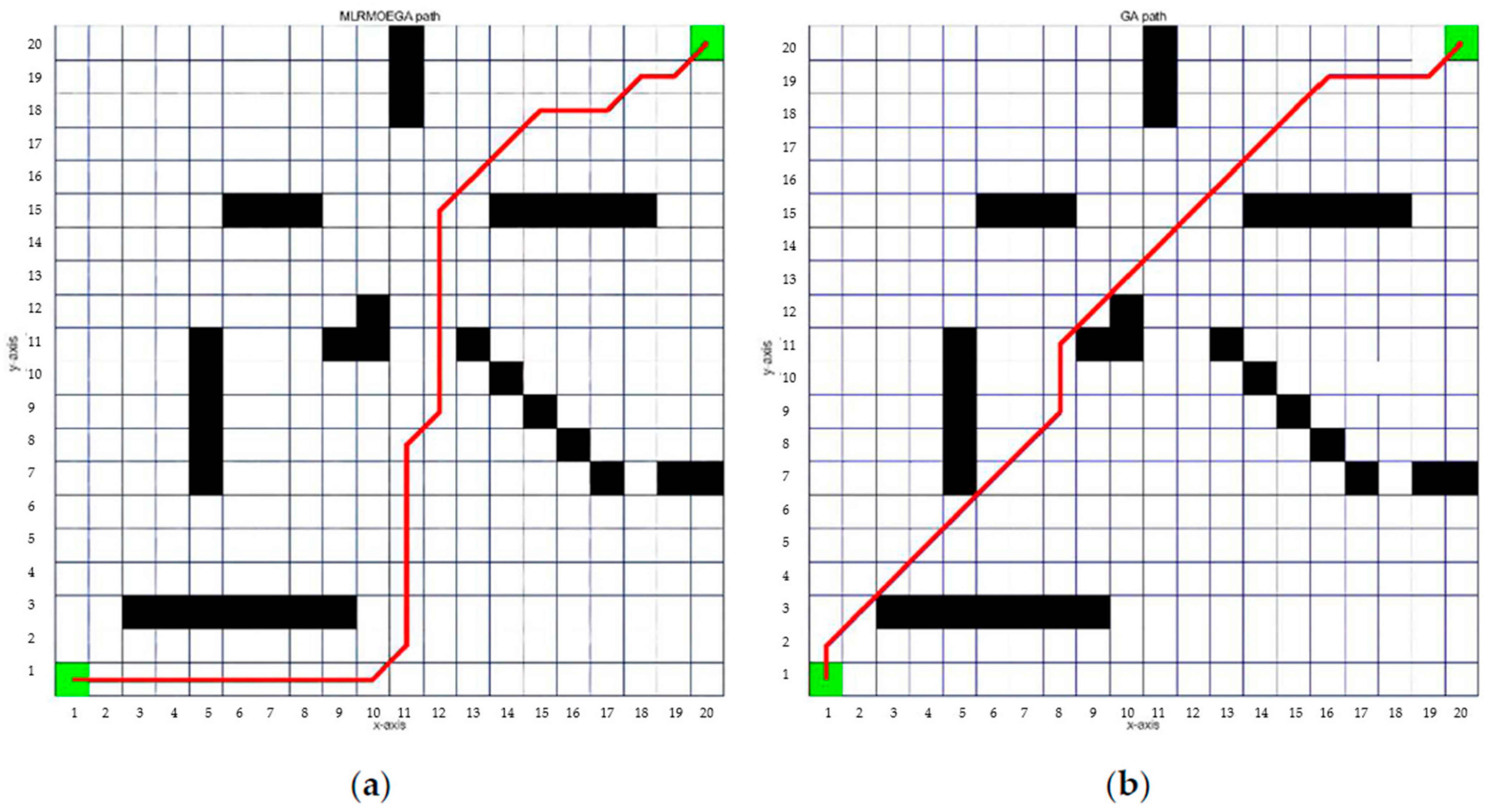
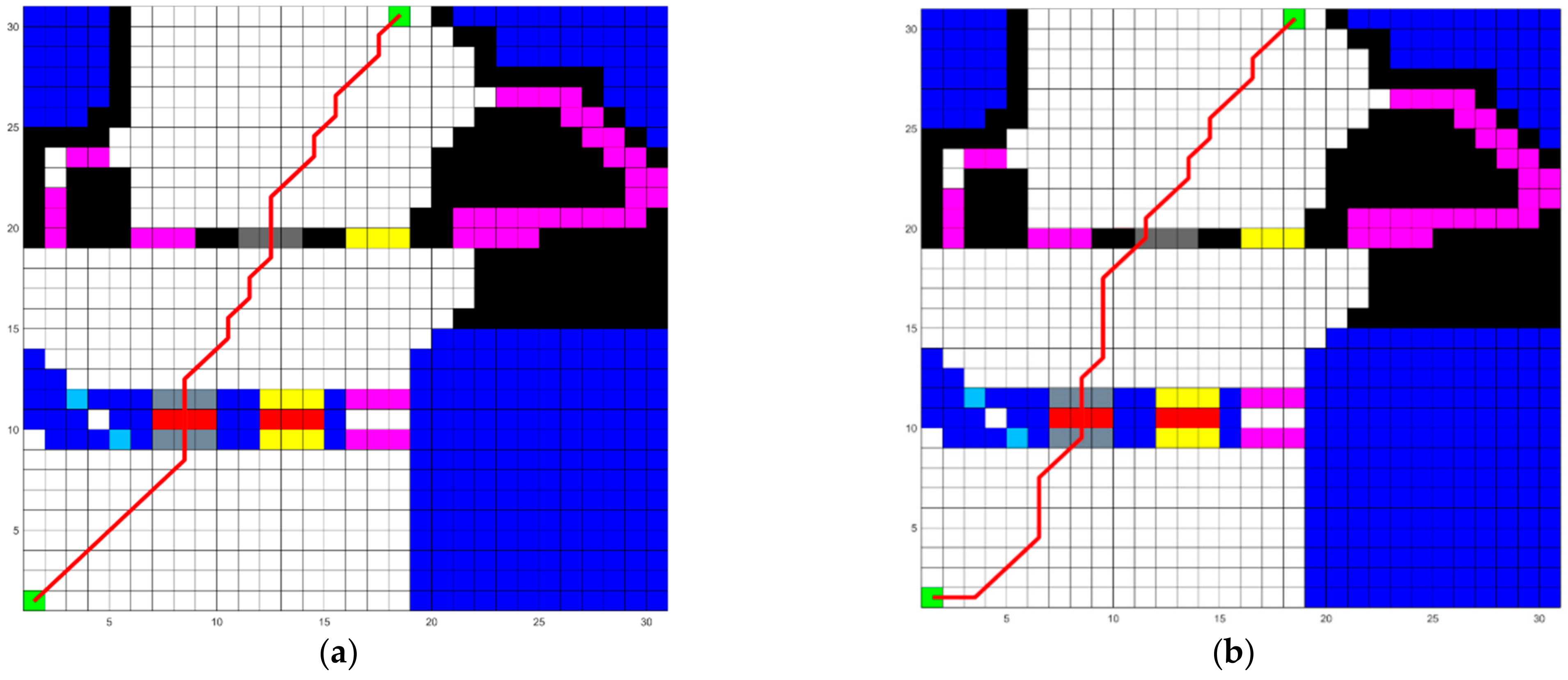
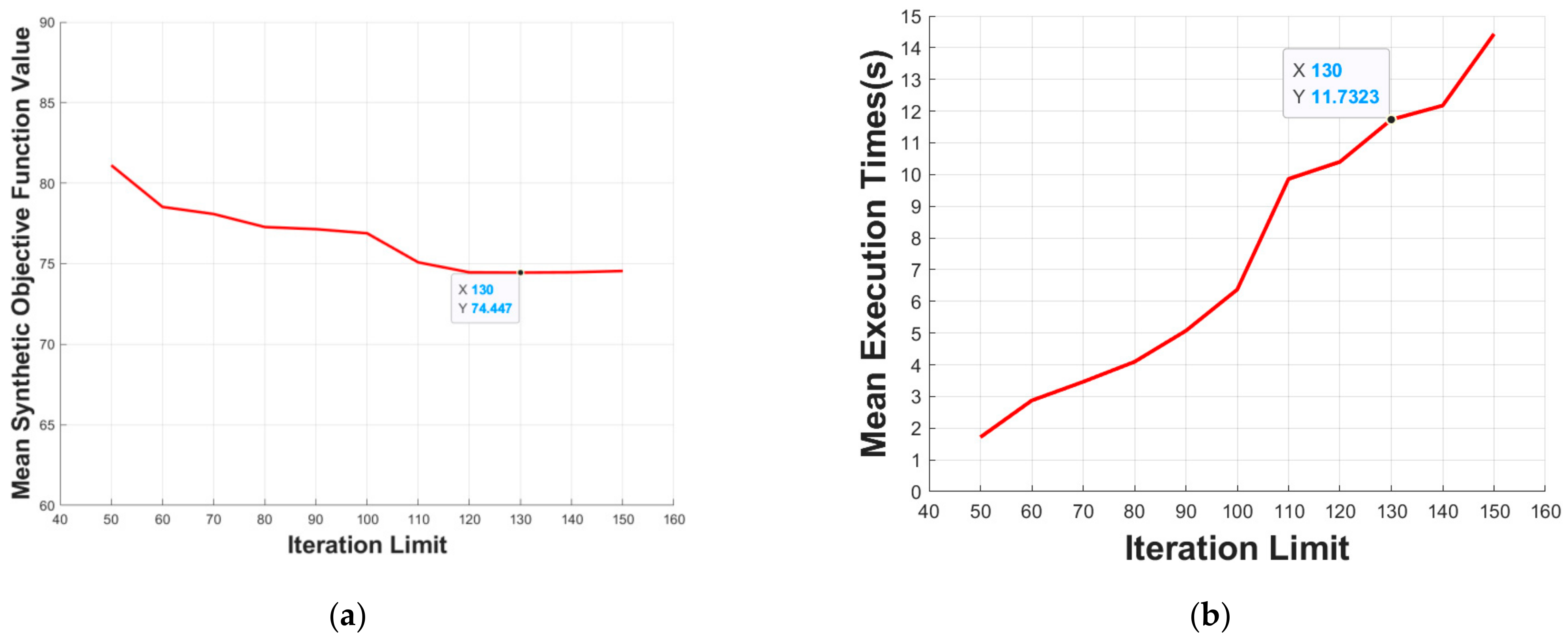
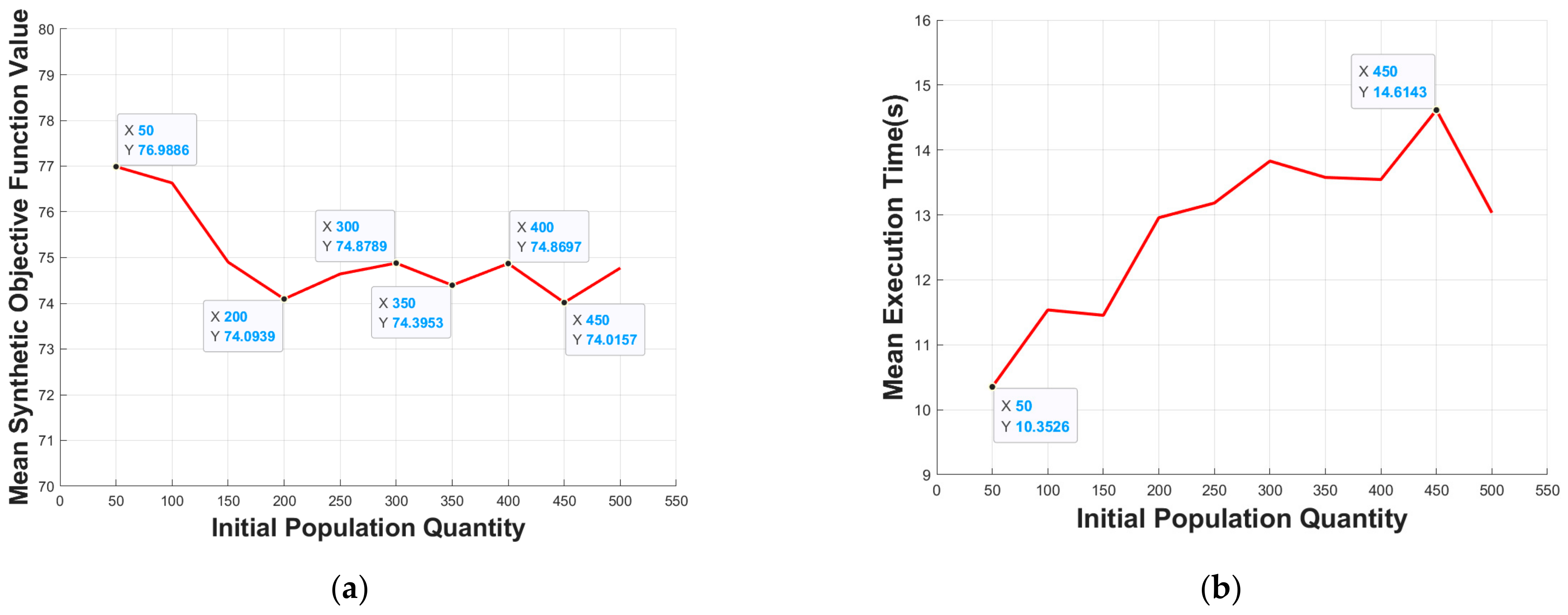
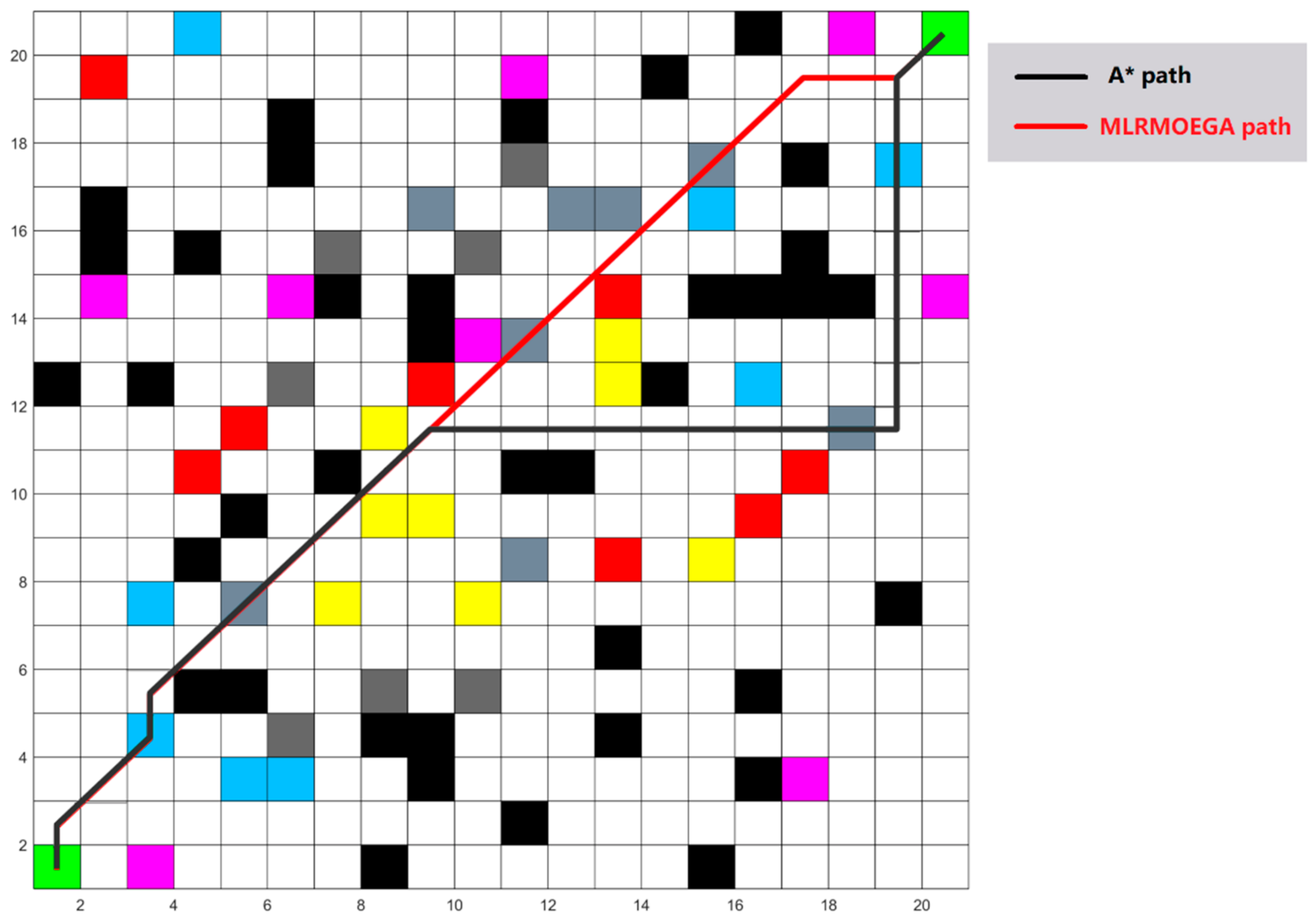
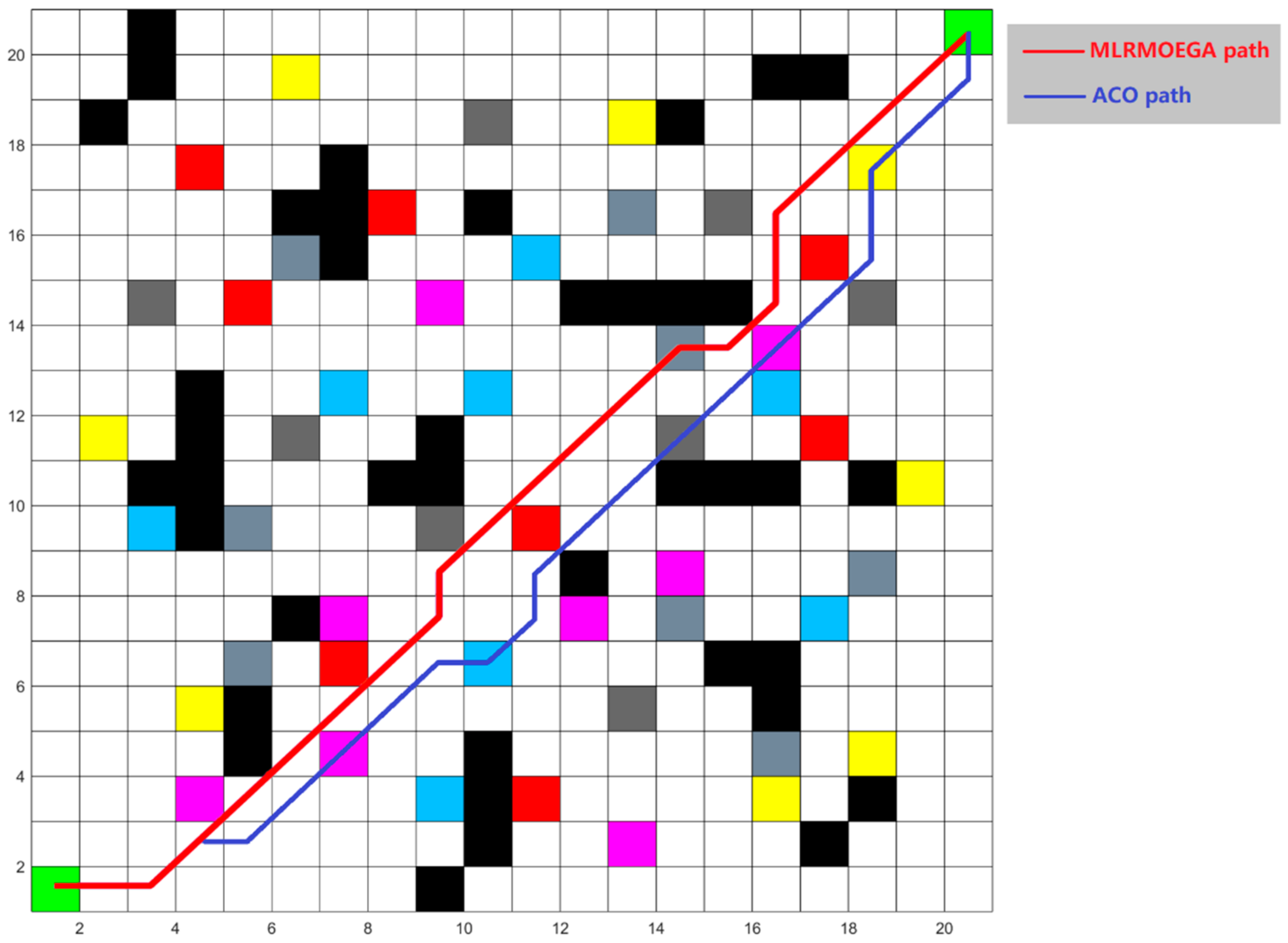
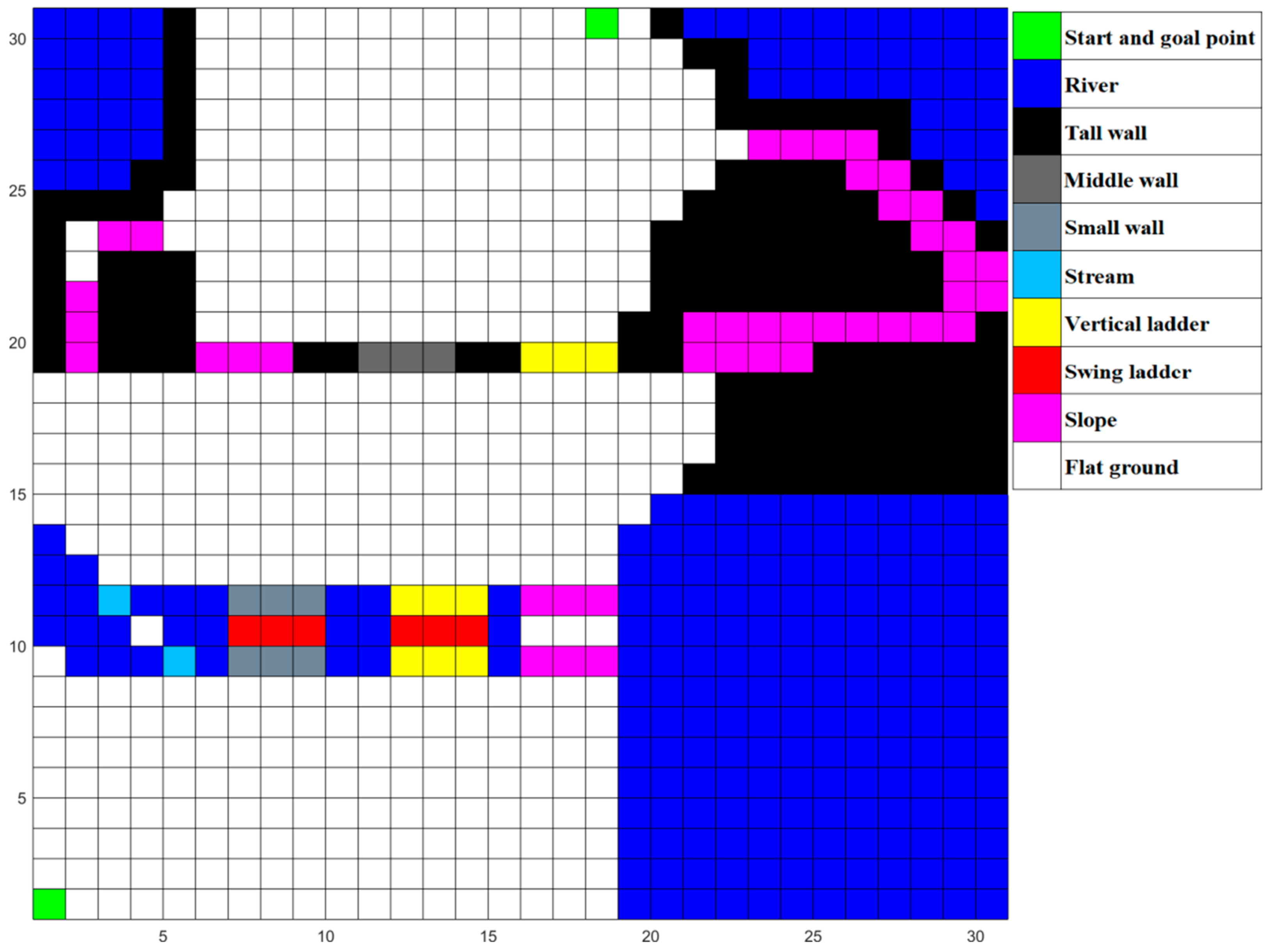
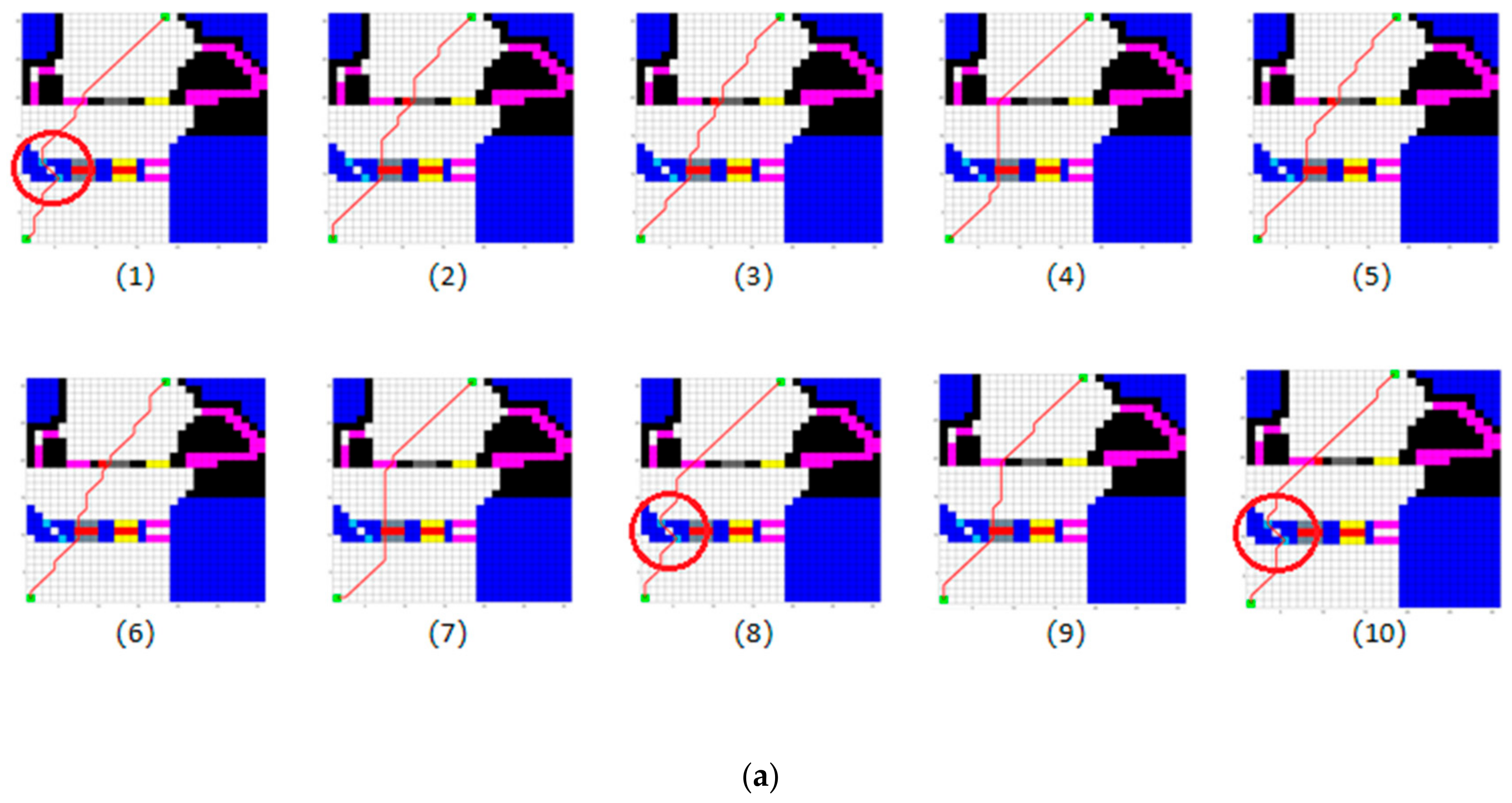
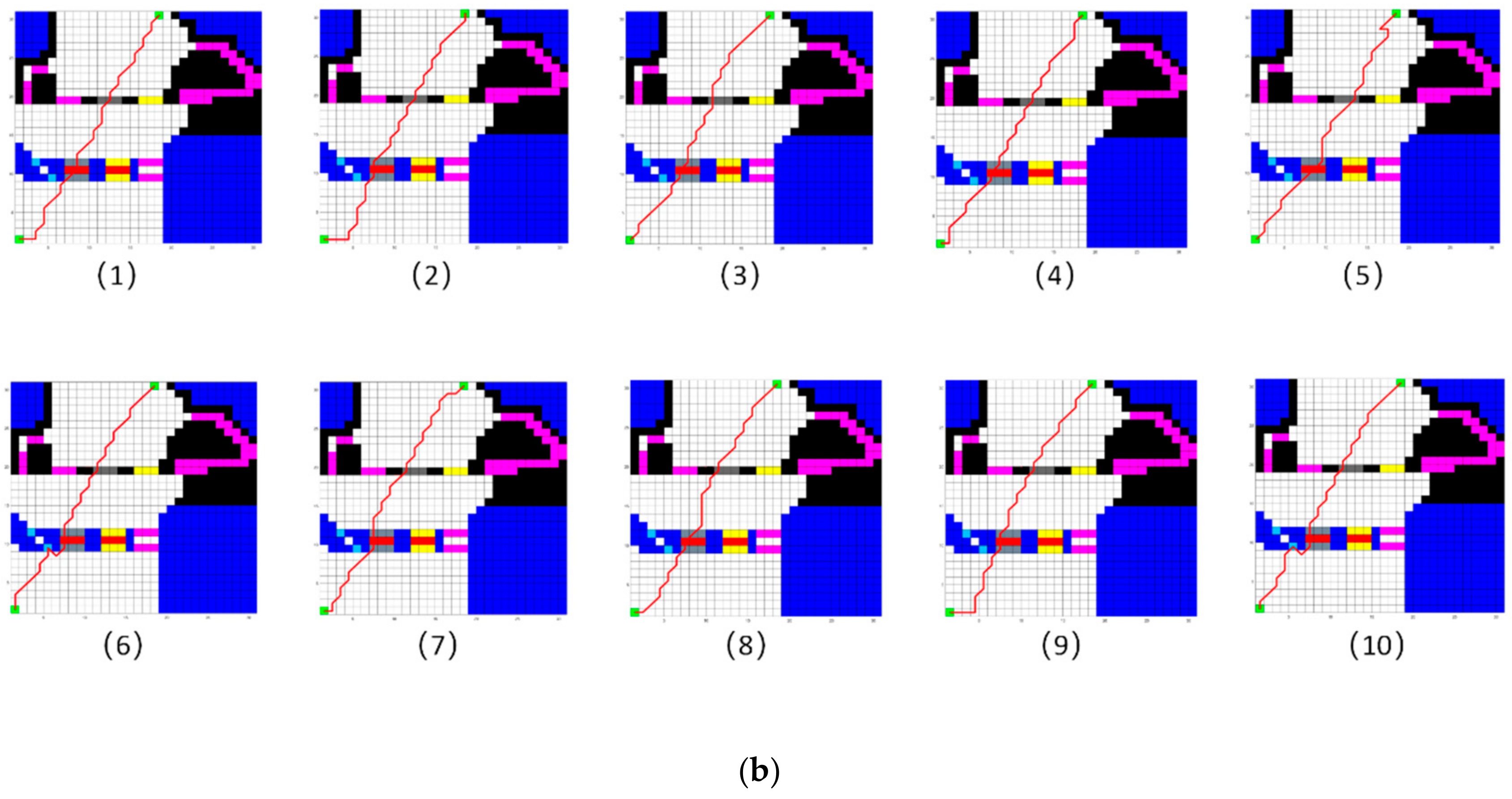
This paper proposed a multi-objective path planning algorithm for a multi-locomotion robot based on a genetic algorithm with elitist strategy. First, we determine four optimization objectives: power consumption, time consumption, falling risk, and smoothness, then set their objective functions and evaluation functions. Then, to solve the problem of premature convergence of SGA, we propose two operators: a map analysis operator and a population diversity expansion operator, to improve the population diversity in the algorithm process. We run the proposed algorithm in 30 × 30 grids testing environment, and the optimal design parameters are determined by balancing the execution time and the synthetic objective function value. After obtaining the optimal design parameters, we test its performance and compare the proposed algorithm in multiple environments with SGA. The results show that the proposed algorithm can effectively improve the global search ability and convergence of SGA. We also compare the proposed algorithm with a multi-objective A* algorithm. We run these two algorithms in a random 20 × 20 grid map; the results show that the synthetic objective function value of the MLRMOEGA path is better than that of the multi-objective A* algorithm path under equal weight due to the better global search ability of MLRMOEGA. Then, we test the performance of the proposed algorithm in a simulation environment which is close to the real field environment; the results show that the global search ability and optimization ability of MLRMOEGA is better than that of SGA. In addition, we test the multi-objective optimization performance under alternative weights, and we find that the output path results can effectively optimize the value of objective functions that the decision maker emphasizes.
According to the results above, the MLRMOEGA proposed in this paper can be effectively applied to MLR tasks, such as pipeline maintenance, medical care by micro-robots, cargo transporting, and terrain exploration by humanoid robots.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}