
A Convolutional Dynamic-Jerk-Planning Algorithm for Impedance Control of Variable-Stiffness Cable-Driven Manipulators

Abstract
:1. Introduction
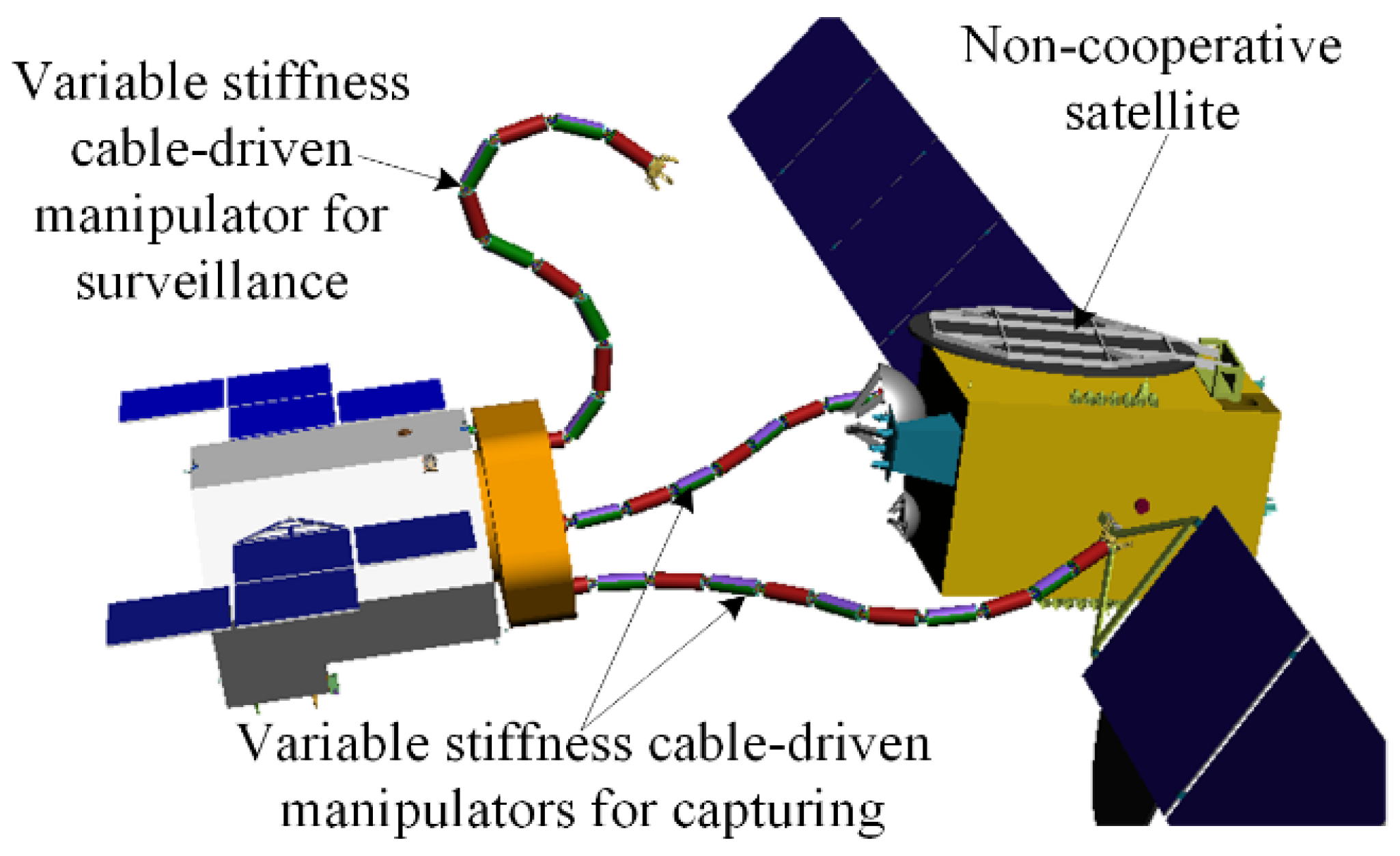
2. Structure of Variable-Stiffness Cable-Driven Manipulators
- Separate Layout of Mechanical and Electrical Components. The motors, controllers, and other electrical components of a manipulator are uniformly installed on a highly protected satellite platform, which enhances their reliability in harsh environments. This design also means that a manipulator is light weight and has low inertia, such that its motion has little effect on its satellite platform.
- Organic Integration of Rigid and Flexible Components. A manipulator achieves a rigid and flexible variable-stiffness working effect by controlling its configuration and cable tension. Thus, a manipulator is suited for use in the low-impact capture and high-stiffness manipulation of non-cooperative satellites.
- Dexterous Motion. A manipulator has both hyper-redundant DOF and slender linkages. Thus, it can move dexterously in unconstrained and narrow environments with many obstacles and perform maintenance tasks in complex environments.
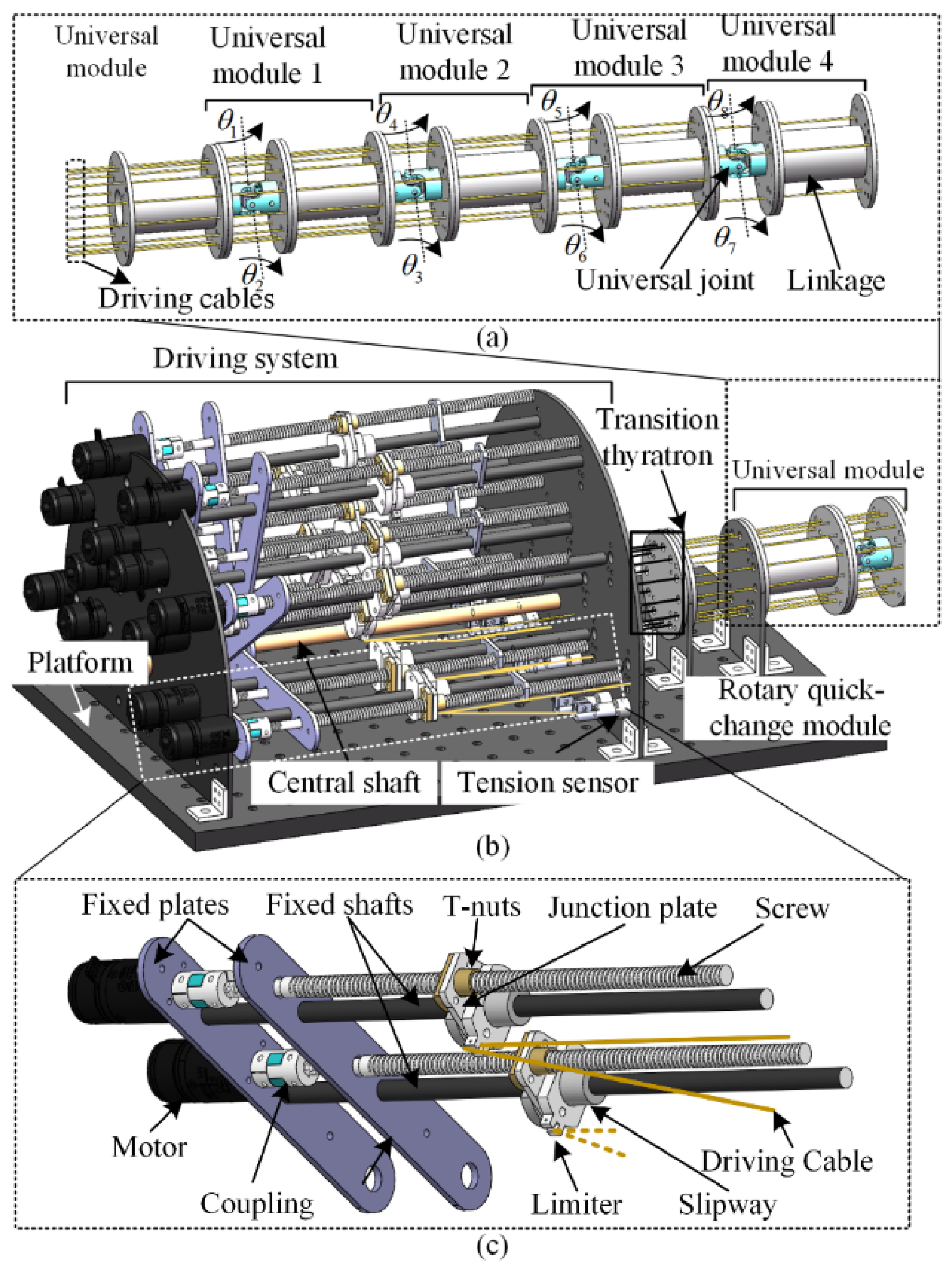
2.1. Structure Design
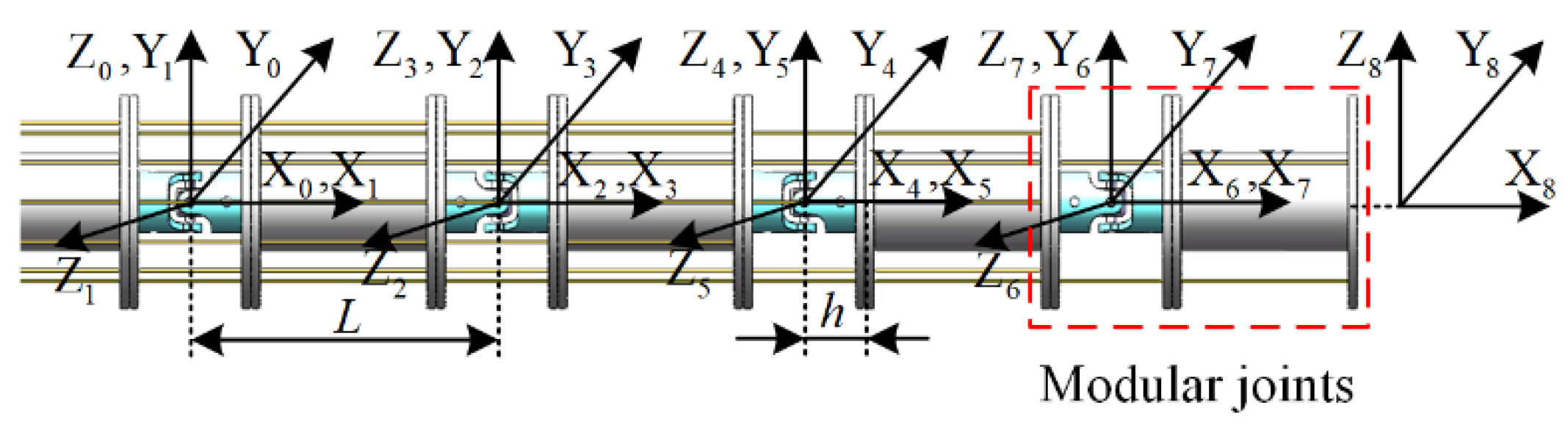
2.2. Kinematic Model
3. Convolutional Dynamic-Jerk-Planning Algorithm for Variable-Stiffness Cable-Driven Manipulators
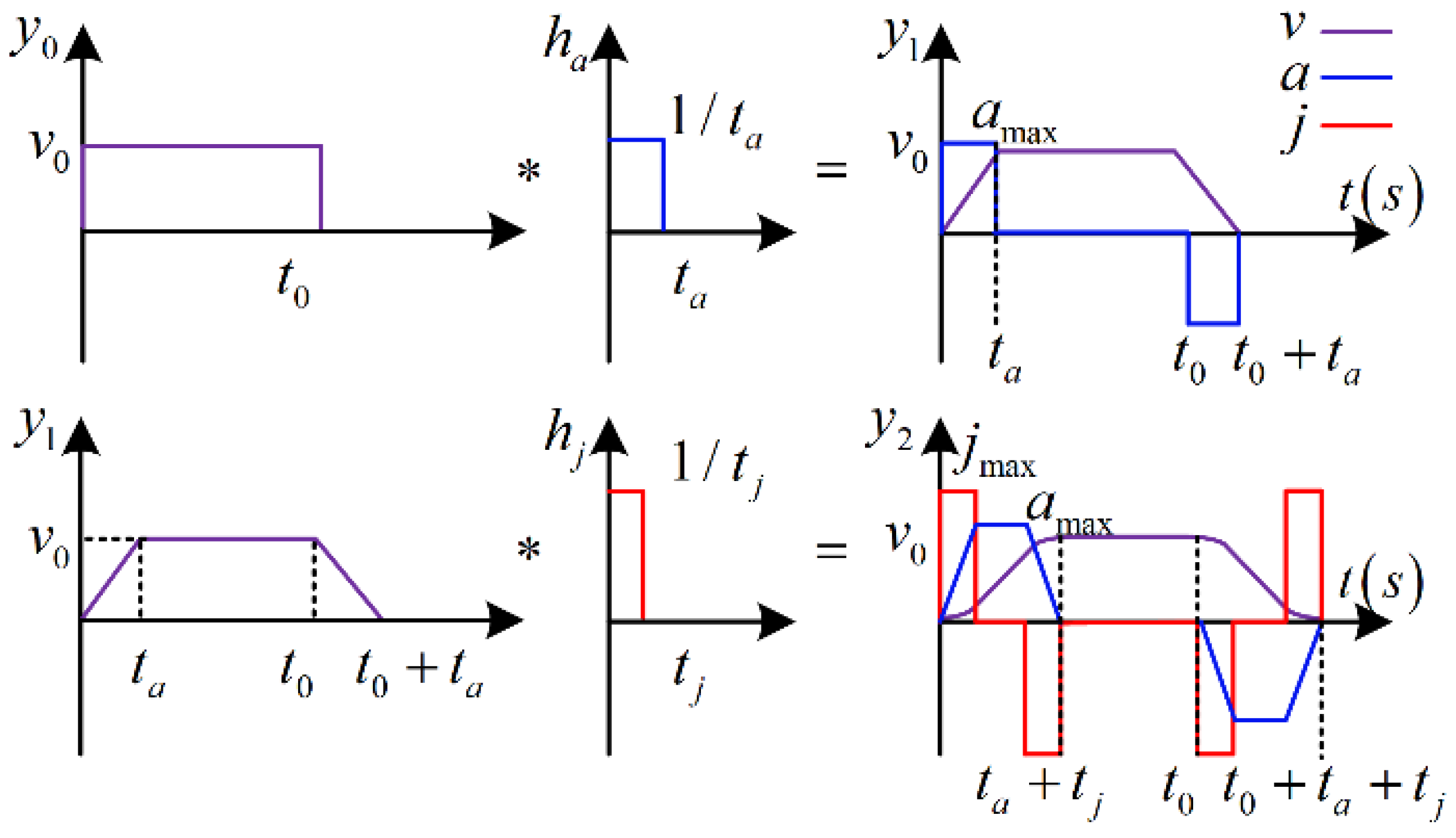
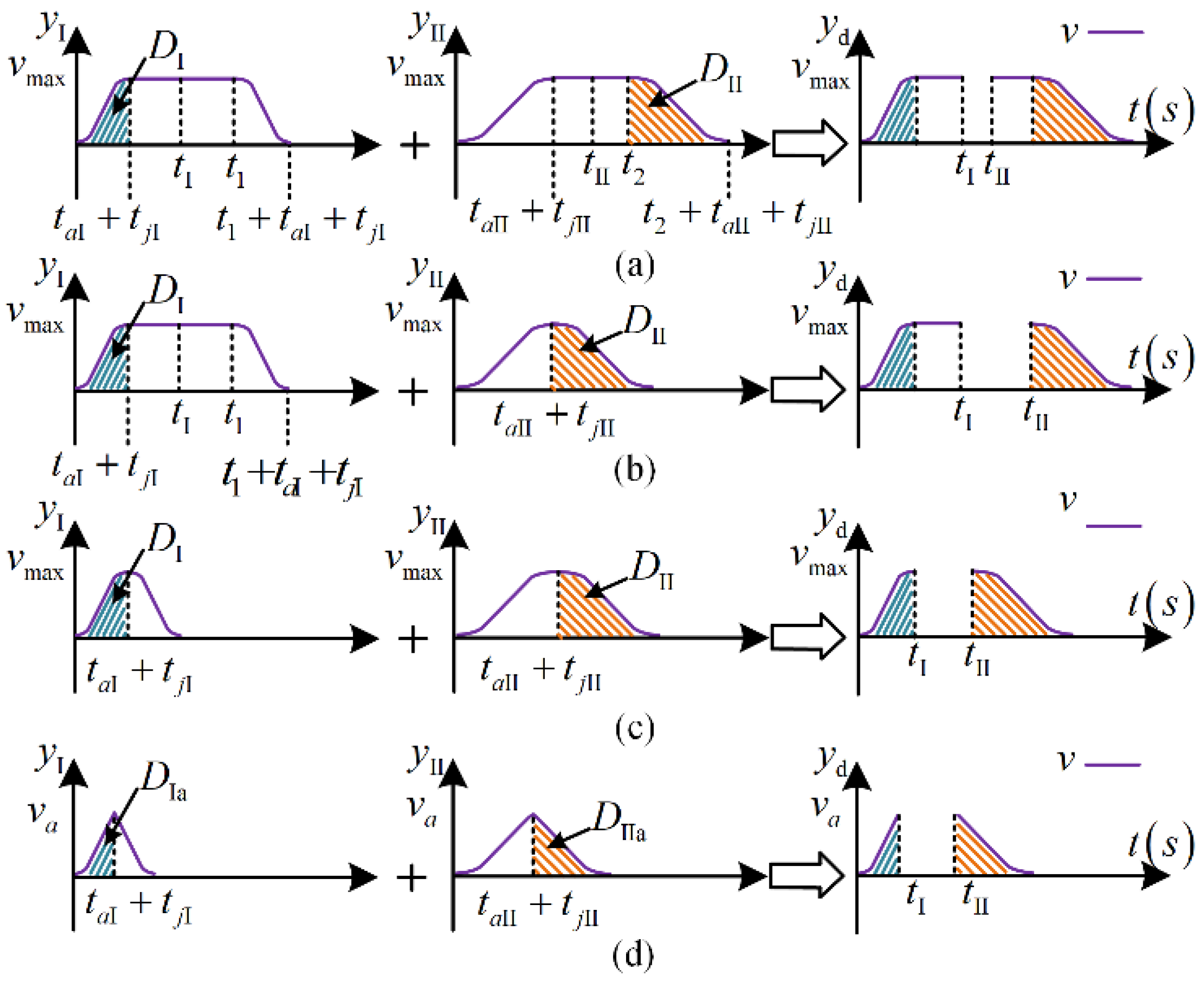
3.1. Principle of Convolutional Dynamic-Jerk-Planning Algorithm
3.2. Applications of the Convolutional Dynamic-Jerk-Planning Algorithm
- 1.
- Ultra-long displacement:
- 2.
- Long displacement:
- 3.
- Medium displacement:
- 4.
- Short displacement:
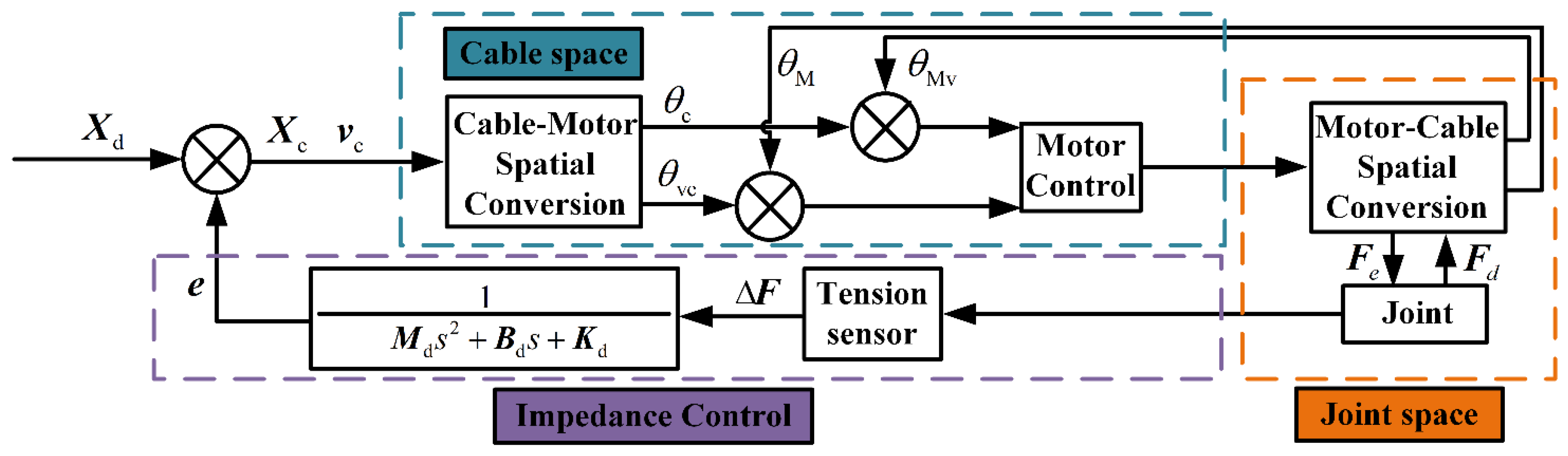
4. Position-Based Impedance Control of Variable-Stiffness Cable-Driven Manipulators
5. Prototypes and Experiments
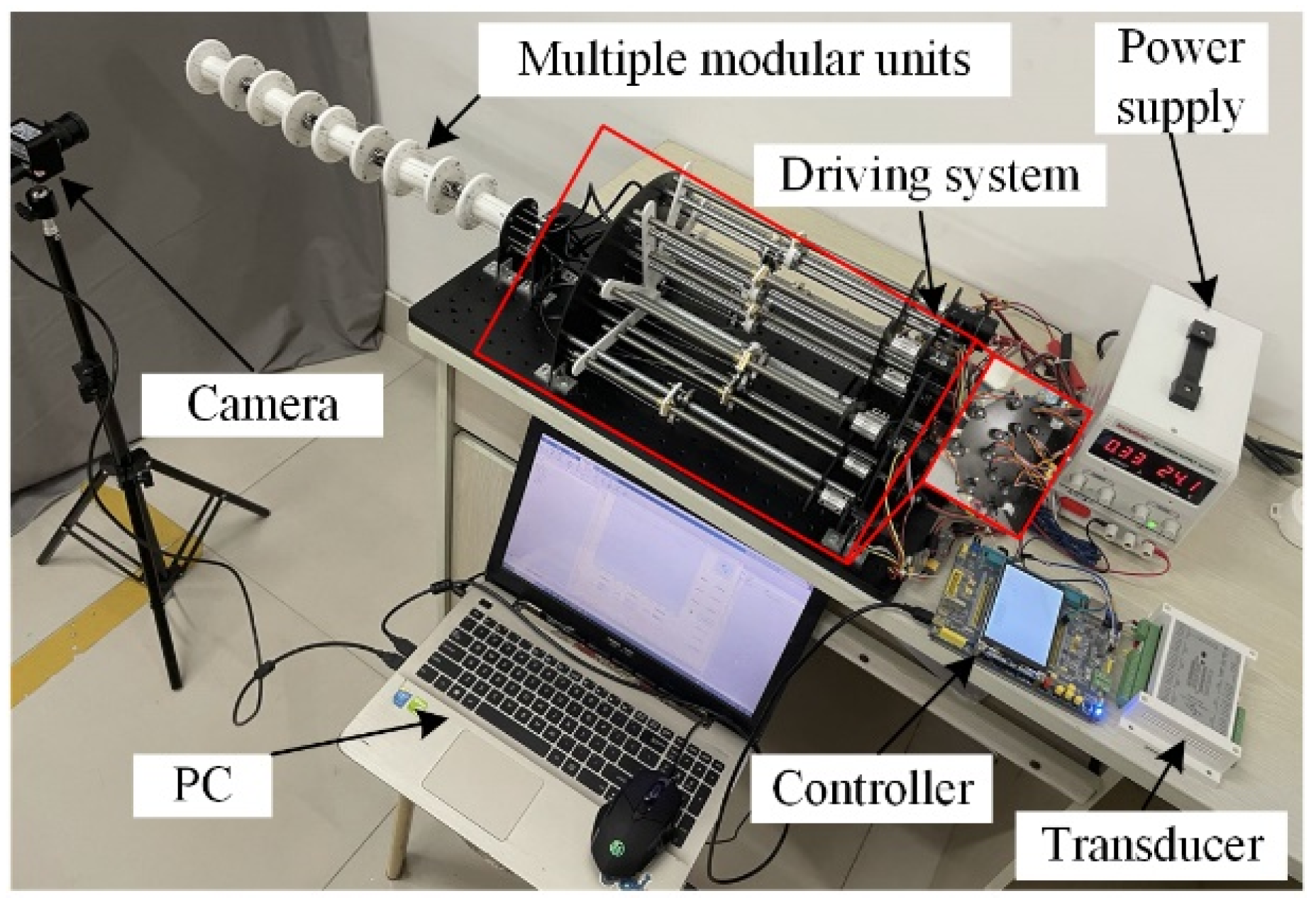
5.1. Experiment Setup
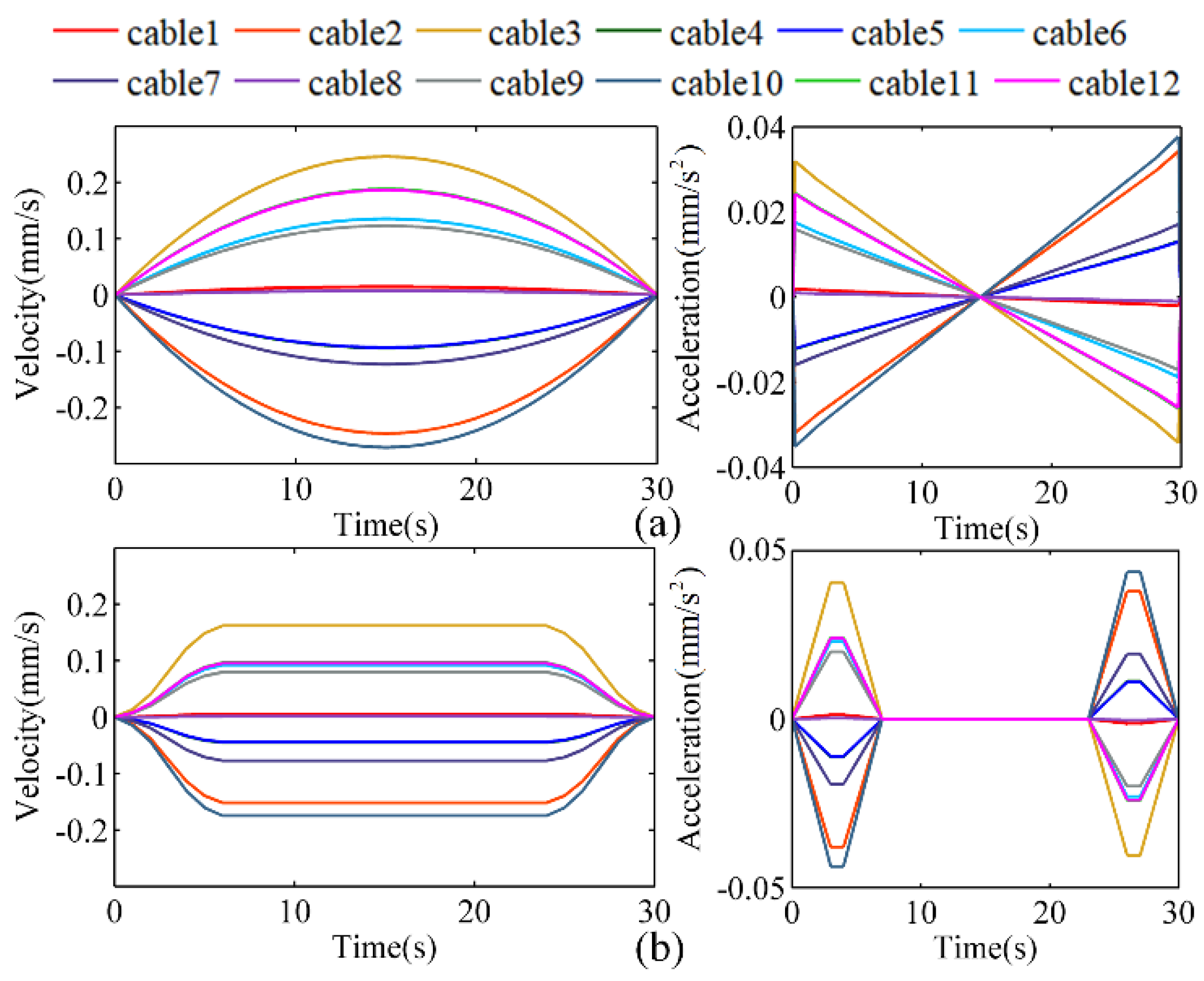
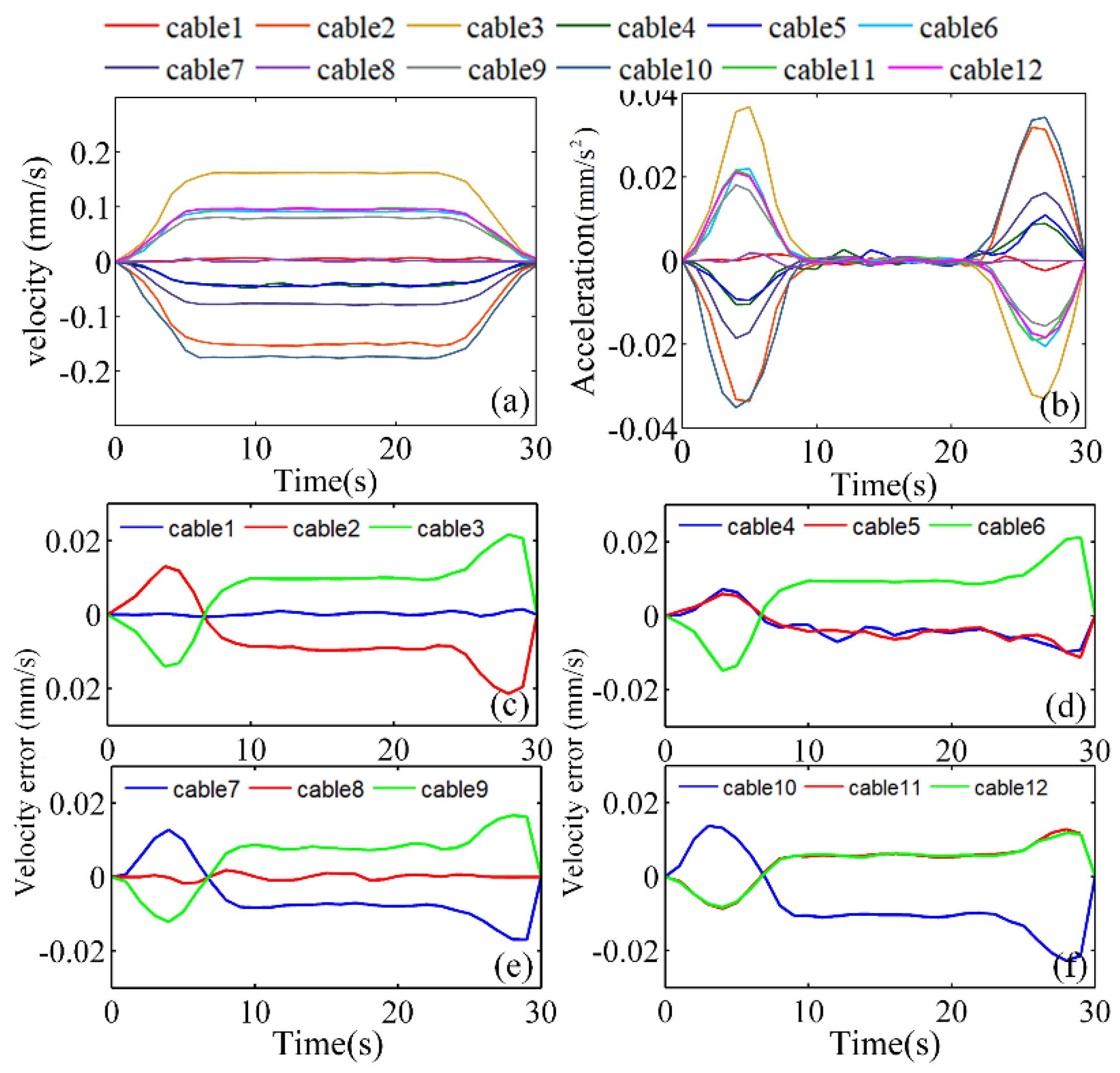
5.2. Velocity Control Experiments
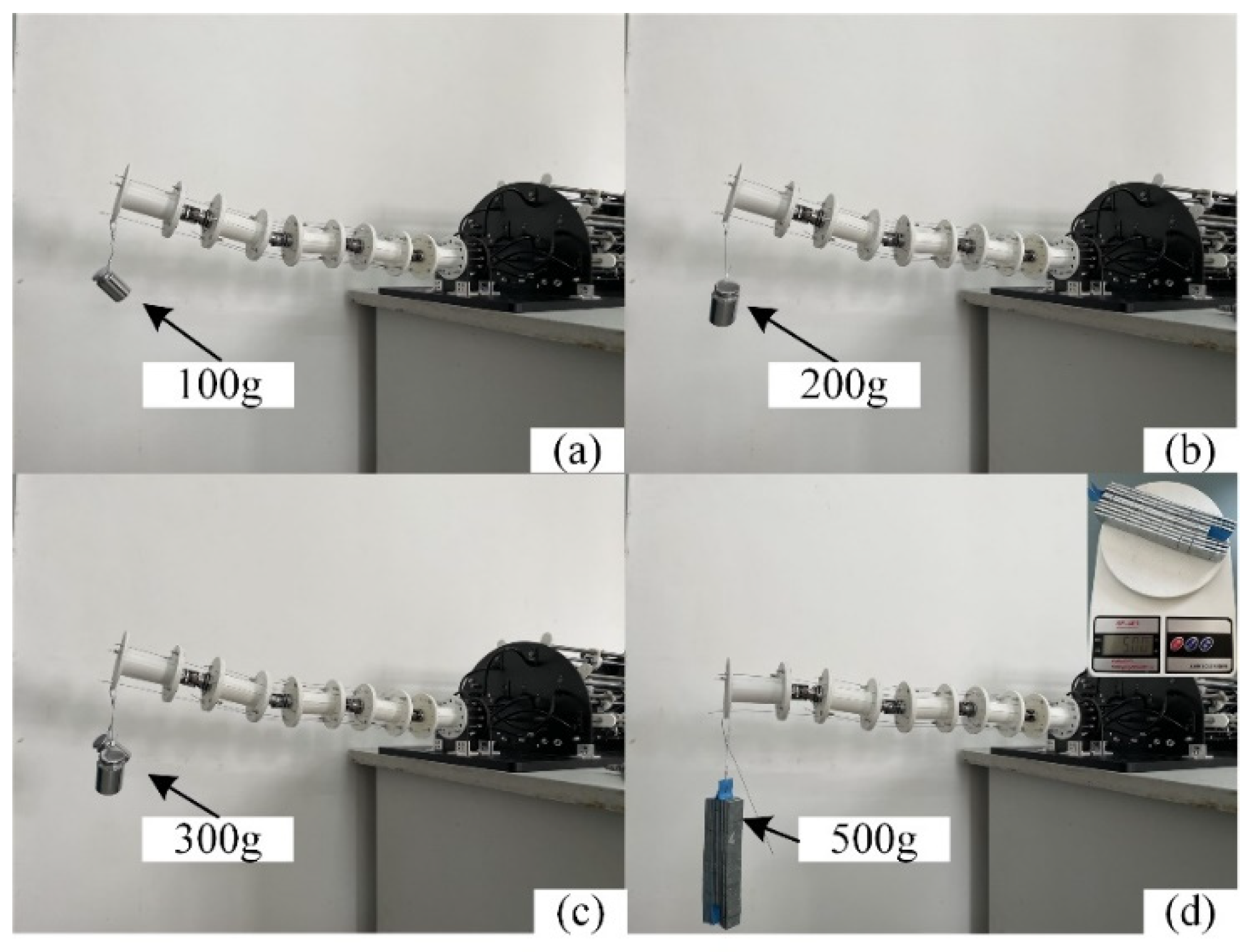
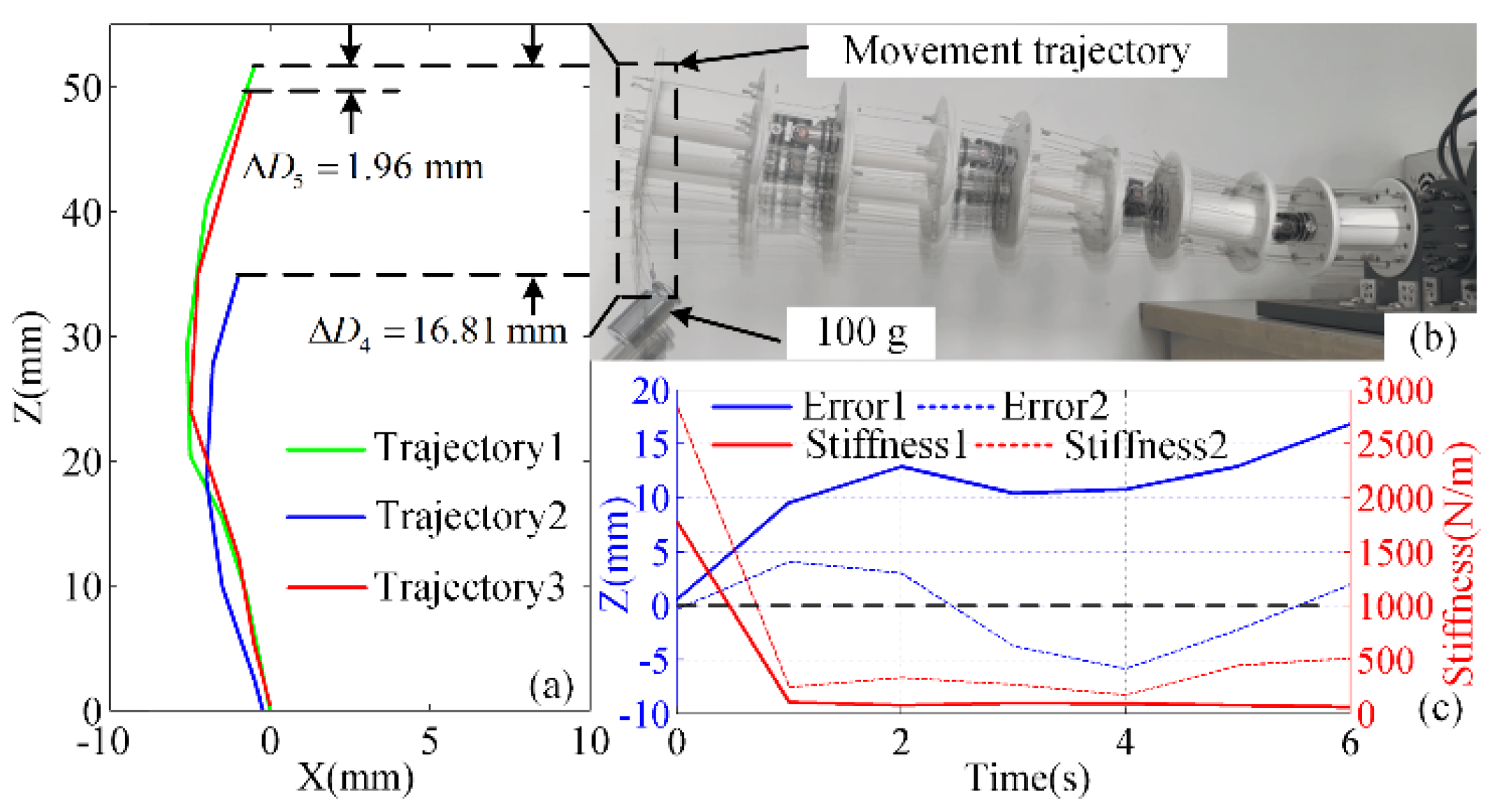
5.3. Stiffness Control Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, P.; Zhang, F.; Meng, Z.; Liu, Z. Adaptive control for space debris removal with uncertain kinematics, dynamics and states. Acta Astronaut. 2016, 128, 416–430. [Google Scholar] [CrossRef]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Felicetti, L.; Gasbarri, P.; Pisculli, A.; Sabatini, M.; Palmerini, G.B. Design of robotic manipulators for orbit removal of spent launchers’ stages. Acta Astronaut. 2016, 119, 118–130. [Google Scholar] [CrossRef]
- Xu, W.; Mu, Z.; Liu, T.; Liang, B. A Modified Modal Method for Solving the Mission-oriented Inverse Kinematics of Hyper-redundant Space Manipulators for On-orbit Servicing. Acta Astronaut. 2017, 139, 54–66. [Google Scholar] [CrossRef]
- Hu, Z.; Yuan, H.; Xu, W.; Yang, T.; Liang, B. Equivalent kinematics and pose-configuration planning of segmented hyper-redundant space manipulators. Acta Astronaut. 2021, 185, 102–116. [Google Scholar] [CrossRef]
- Aghili, F. Coordination control of a free-flying manipulator and its base attitude to capture and detumble a noncooperative satellite. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2365–2372. [Google Scholar]
- Lim, J.; Chung, J. Dynamic analysis of a tethered satellite system for space debris capture. Nonlinear Dyn. 2018, 94, 2391–2408. [Google Scholar] [CrossRef]
- Dai, H.; Cao, X.; Jing, X.; Wang, X.; Yue, X. Bio-inspired anti-impact manipulator for capturing non-cooperative spacecraft: Theory and experiment. Mech. Syst. Signal Process. 2020, 142, 106785. [Google Scholar] [CrossRef]
- Mustaza, S.M.; Saaj, C.M.; Comin, F.J.; Albukhanajer, W.A.; Mahdi, D.; Lekakou, C. Stiffness Control for Soft Surgical Manipulators. Int. J. Humanoid Robot. 2018, 15, 1850021. [Google Scholar] [CrossRef]
- Xidias, E.K. Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces. Robot. Comput. Manuf. 2017, 50, 286–298. [Google Scholar] [CrossRef]
- Xu, W.F.; Yan, P.H.; Wang, F.X.; Yuan, H.; Liang, B. Vision-based simultaneous measurement of manipulator configuration and target pose for an intelligent cable-driven robot. Mech. Syst. Signal Process. 2022, 165, 286–298. [Google Scholar] [CrossRef]
- Dong, X.; Axinte, D.; Palmer, D.; Cobos, S.; Raffles, M.; Rabani, A.; Kell, J. Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines. Robot. Comput.-Integr. Manuf. 2017, 44, 218–229. [Google Scholar] [CrossRef] [Green Version]
- Peng, J.; Xu, W.; Liu, T.; Yuan, H.; Liang, B. End-effector pose and arm-shape synchronous planning methods of a hyper-redundant manipulator for spacecraft repairing. Mech. Mach. Theory 2021, 155, 104062. [Google Scholar] [CrossRef]
- Qin, G.; Ji, A.; Cheng, Y.; Zhao, W.; Pan, H.; Shi, S.; Song, Y. A Snake-Inspired Layer-Driven Continuum Robot. Soft Robot. 2022, 9, 788–797. [Google Scholar] [CrossRef] [PubMed]
- Zhao, B.; Zeng, L.; Wu, Z.; Xu, K. A continuum manipulator for continuously variable stiffness and its stiffness control formulation. Mech. Mach. Theory 2020, 149, 10374646. [Google Scholar] [CrossRef]
- Liu, T.; Jackson, R.; Franson, D.; Poirot, N.L.; Criss, R.K.; Seiberlich, N.; Griswold, M.A.; Cavusoglu, M.C. Iterative Jacobian-Based Inverse Kinematics and Open-Loop Control of an MRI-Guided Magnetically Actuated Steerable Catheter System. IEEE/ASME Trans. Mechatron. 2017, 22, 1765–1776. [Google Scholar] [CrossRef] [PubMed]
- Jones, B.; Walker, I. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Tang, L.; Huang, J.; Zhu, L.; Zhu, X.; Gu, G. Path Tracking of a Cable-Driven Snake Robot with a Two-Level Motion Planning Method. IEEE/ASME Trans. Mechatron. 2019, 24, 935–946. [Google Scholar] [CrossRef]
- Ma, N.; Yu, J.; Dong, X.; Axinte, D. Design and stiffness analysis of a class of 2-DoF tendon driven parallel kinematics mechanism. Mech. Mach. Theory 2018, 129, 202–217. [Google Scholar] [CrossRef]
- Liu, T.; Mu, Z.; Wang, H.; Xu, W.; Li, Y. A Cable-Driven Redundant Spatial Manipulator with Improved Stiffness and Load Capacity. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6628–6633. [Google Scholar]
- Zhao, B.; Zhang, W.; Zhang, Z.; Zhu, X.; Xu, K. Continuum Manipulator with Redundant Backbones and Constrained Bending Curvature for Continuously Variable Stiffness. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7492–7499. [Google Scholar]
- Zhang, J.; Li, Q.; Chen, W.; Fang, Z.; Yang, G. Design and Stiffness Analysis of a Cable-Driven Continuum Manipulator. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 2026–2031. [Google Scholar]
- Wu, H.; Peng, J.; Han, Y. Workspace Analysis and Stiffness Optimization of Snake-like Cable-Driven Redundant Robots; Springer International Publishing: Cham, Switzerland, 2021. [Google Scholar]
- Mu, Z.; Zhang, L.; Yan, L.; Li, Z.; Dong, R.; Wang, C.; Ding, N. Hyper-Redundant Manipulators for Operations in Confined Space: Typical Applications, Key Technologies, and Grand Challenges. IEEE Trans. Aerosp. Electron. Syst. 2022, 1–10. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | ||||
|---|---|---|---|---|
| 1 | 0 | 90° | 0 | |
| 2 | 0° | 0 | ||
| 3 | 0 | −90° | 0 | |
| 4 | 0° | 0 | ||
| 5 | 0 | 90° | 0 | |
| 6 | 0° | 0 | ||
| 7 | 0 | −90° | 0 | |
| 8 | 0° | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Jia, L.; Yang, P.; Li, Z.; Zhang, Y.; Cheng, X.; Mu, Z. A Convolutional Dynamic-Jerk-Planning Algorithm for Impedance Control of Variable-Stiffness Cable-Driven Manipulators. Micromachines 2022, 13, 2021. https://doi.org/10.3390/mi13112021
Zhang L, Jia L, Yang P, Li Z, Zhang Y, Cheng X, Mu Z. A Convolutional Dynamic-Jerk-Planning Algorithm for Impedance Control of Variable-Stiffness Cable-Driven Manipulators. Micromachines. 2022; 13(11):2021. https://doi.org/10.3390/mi13112021
Chicago/Turabian StyleZhang, Luyang, Lihui Jia, Panpan Yang, Zixuan Li, Yuhuan Zhang, Xiang Cheng, and Zonggao Mu. 2022. "A Convolutional Dynamic-Jerk-Planning Algorithm for Impedance Control of Variable-Stiffness Cable-Driven Manipulators" Micromachines 13, no. 11: 2021. https://doi.org/10.3390/mi13112021