
Thermally Driven Continuous Rolling of a Thick-Walled Cylindrical Rod

Abstract
:1. Introduction
2. Thermally Induced Driving Moment of the Thick-Walled Cylindrical Rod
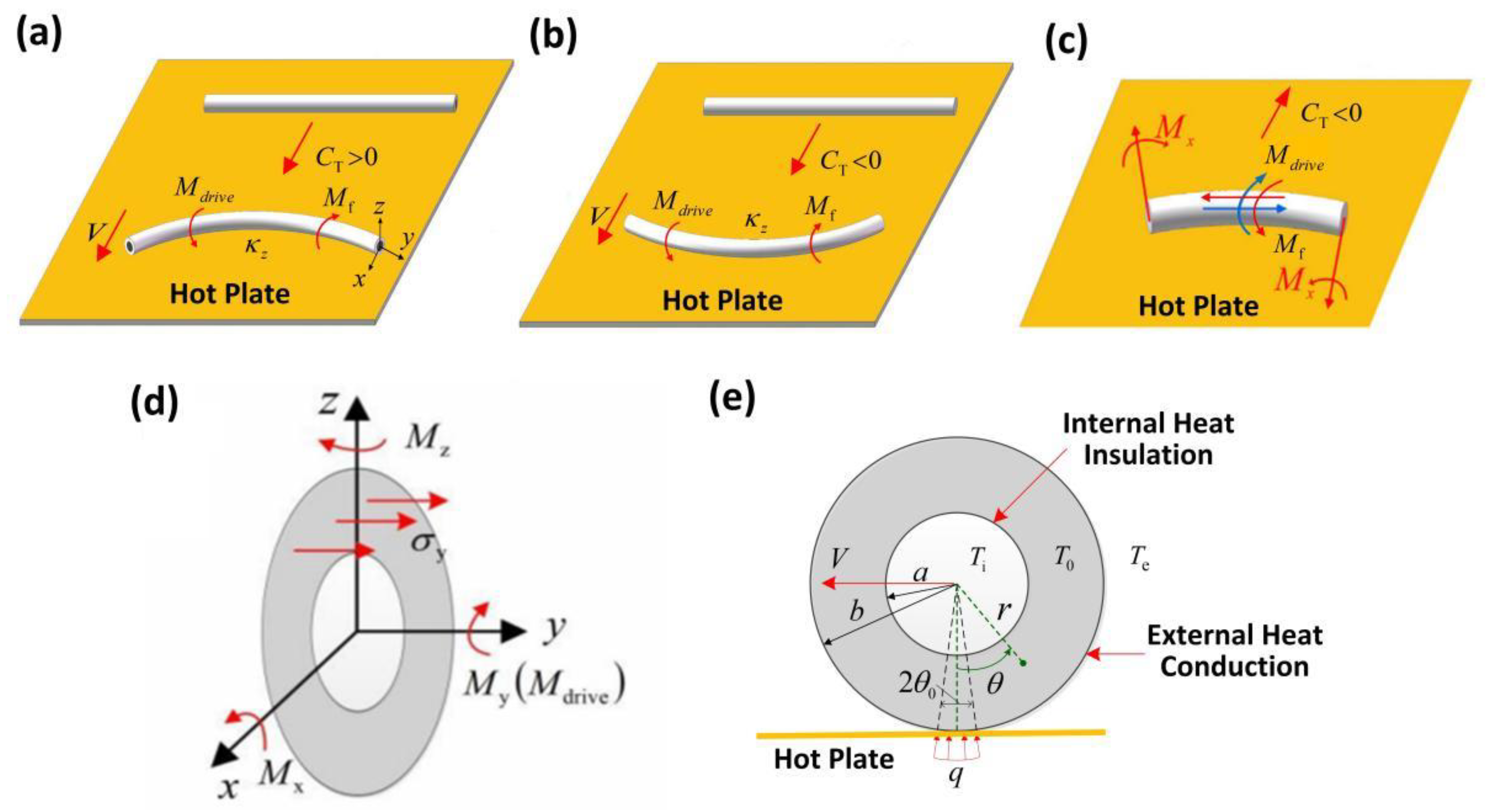
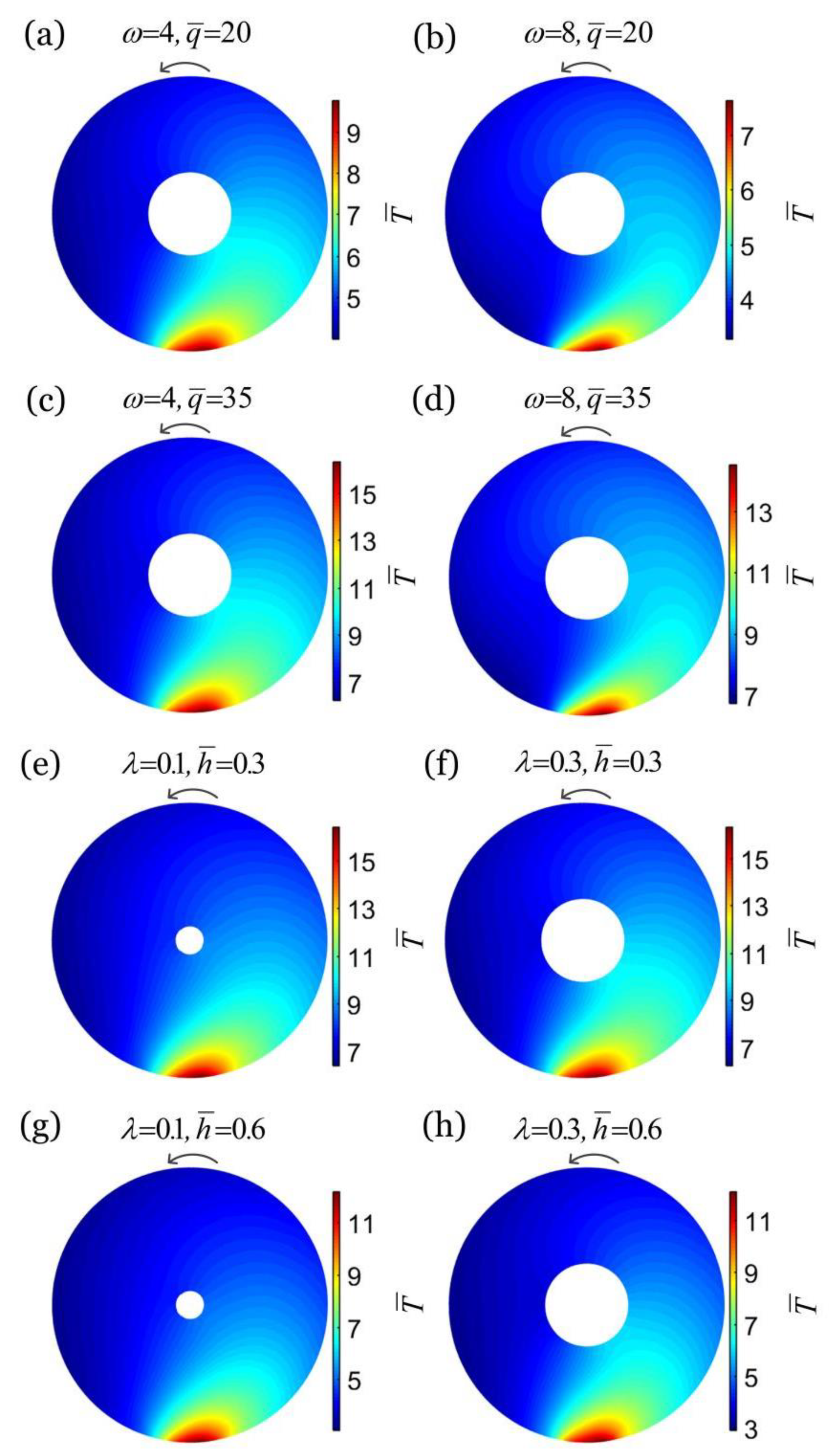
2.1. Temperature Field in the Steadily Rolling Rod
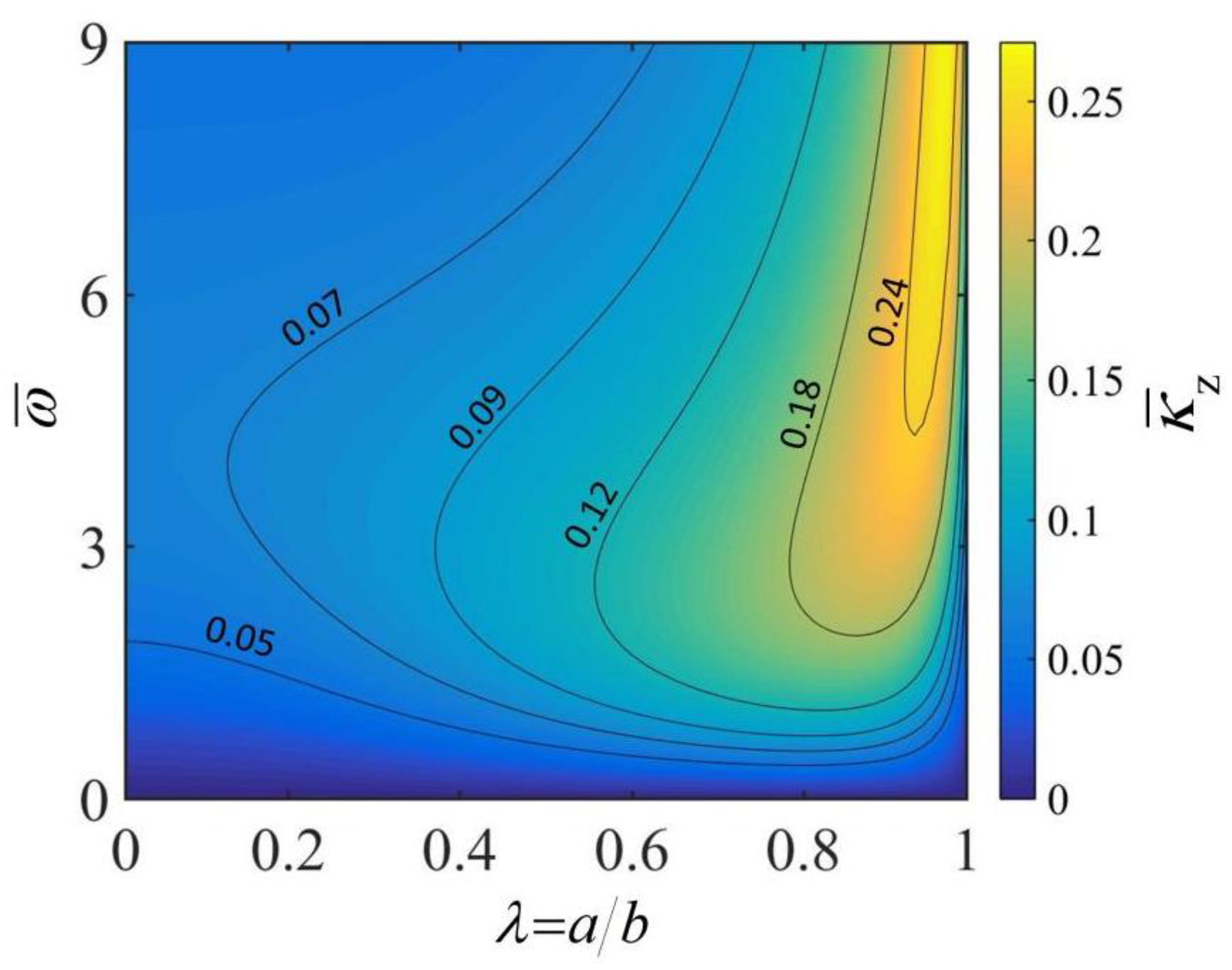
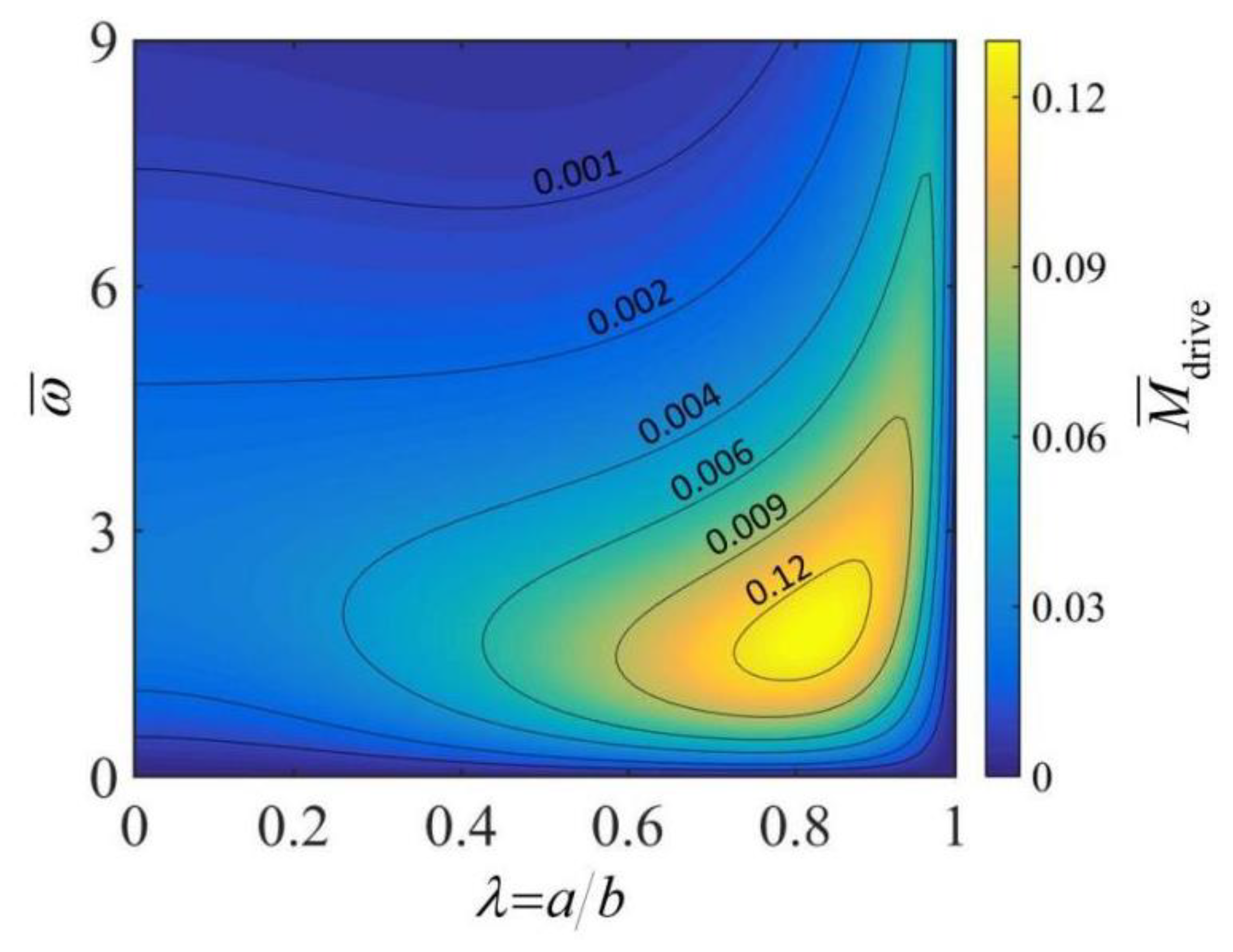
2.2. Driving Moment for the Rolling of the Thick-Walled Cylindrical Rod
3. Self-Rolling of the Thick-Walled Cylindrical Rod on a Hot Plate
3.1. Equilibrium Equations
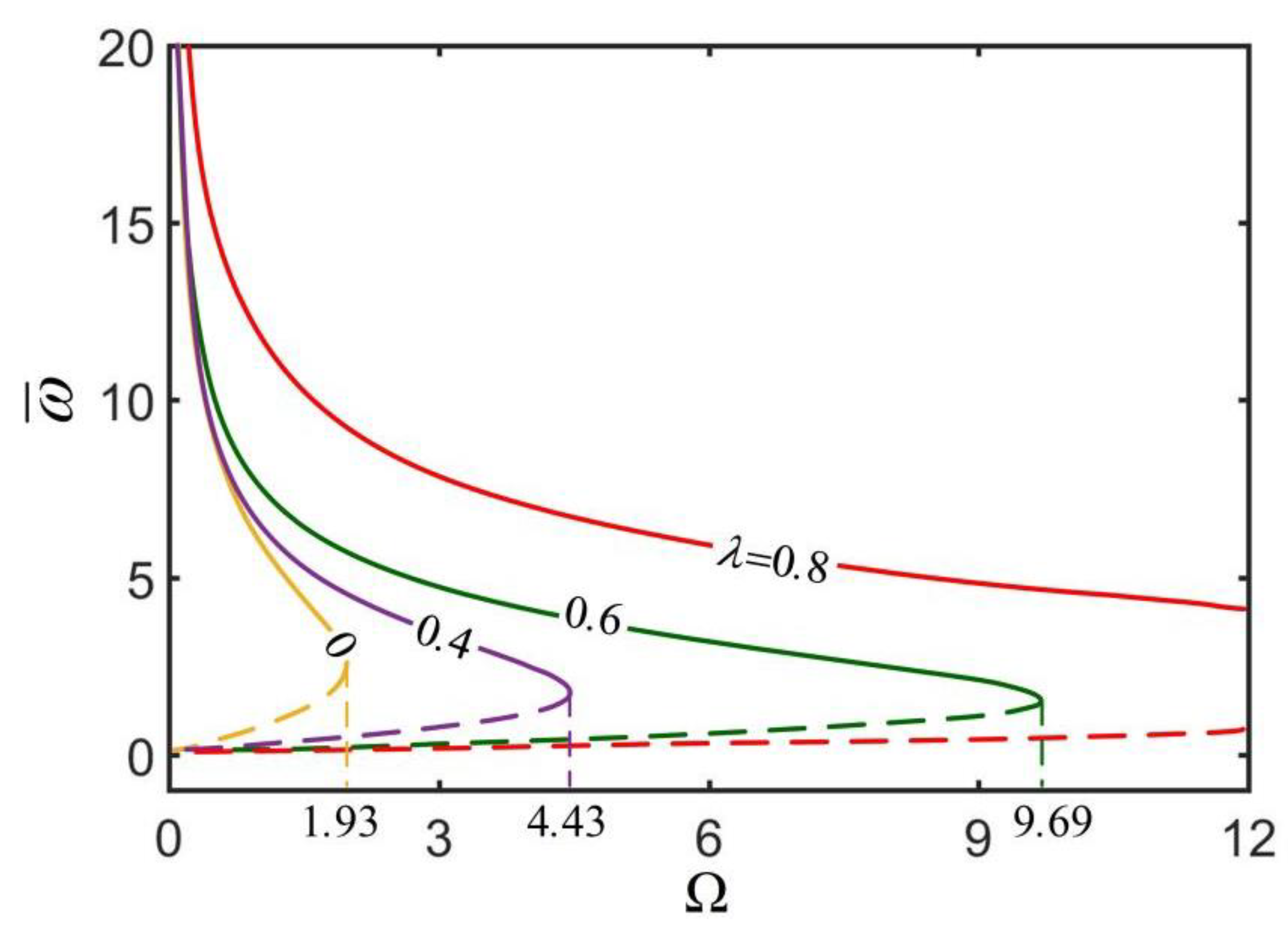
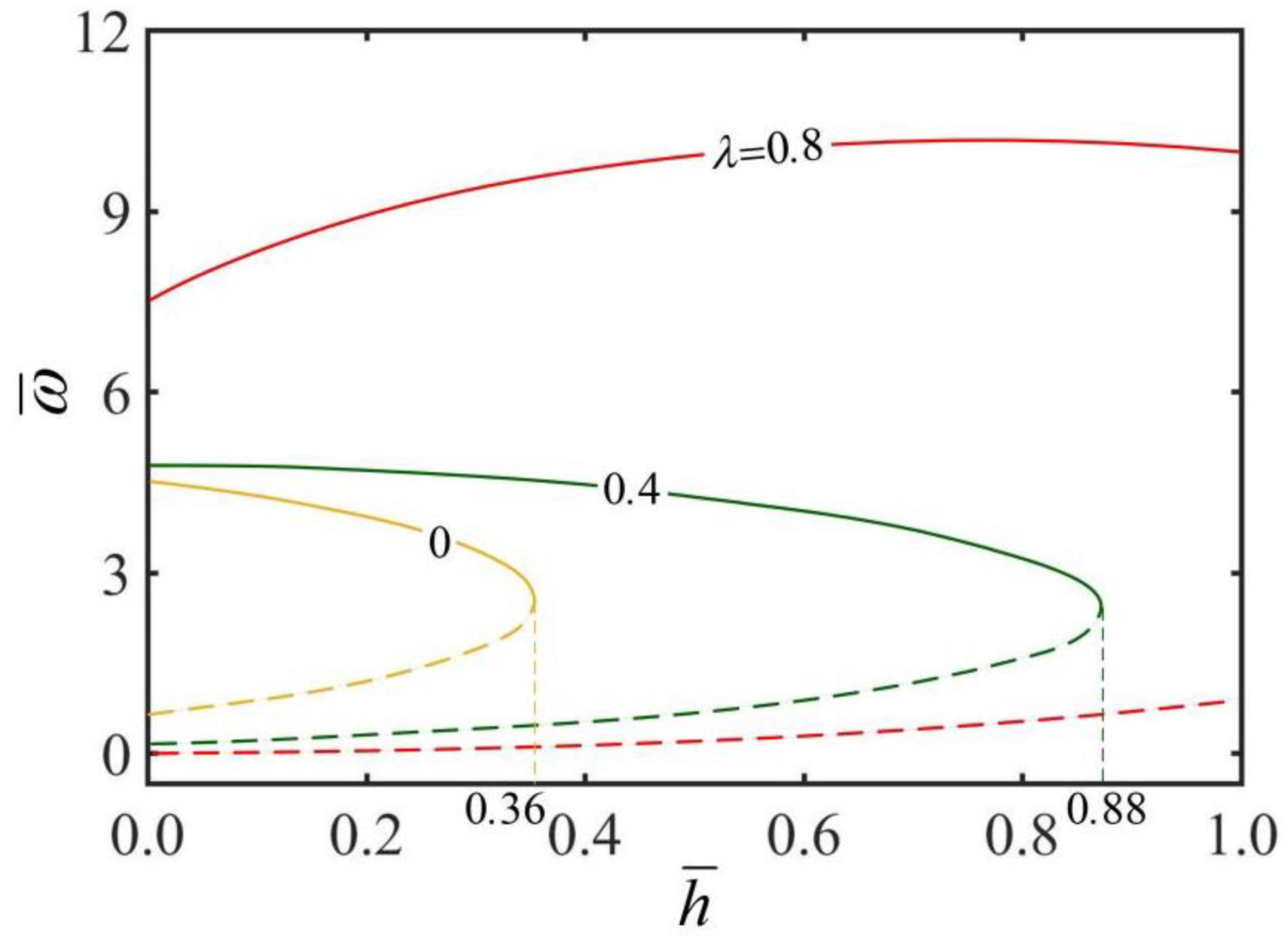
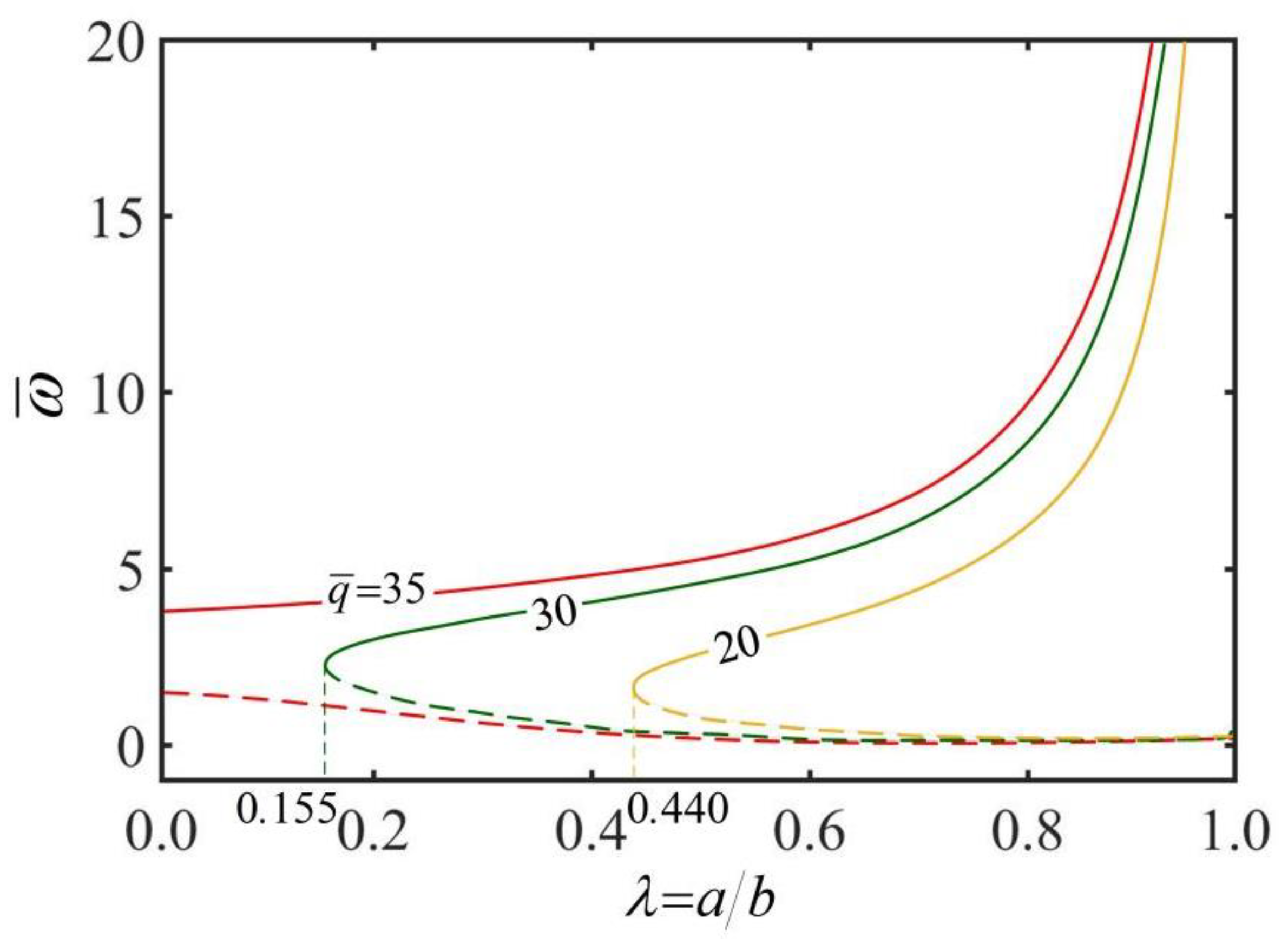
3.2. Angular Velocity of the Self-Rolling of Thick-Walled Cylindrical Rod
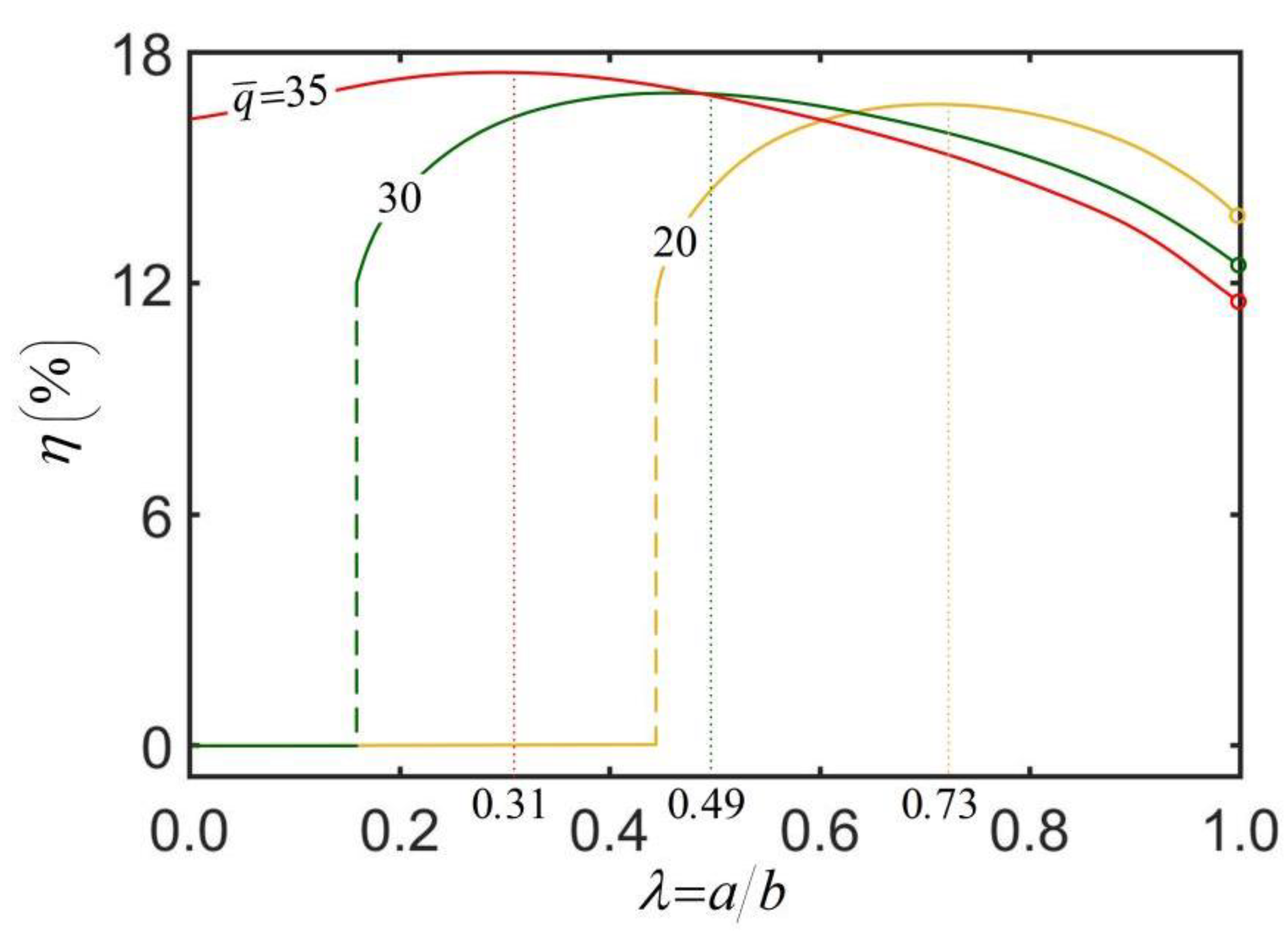
3.3. Energy Efficiency of the Self-Rolling Thick-Walled Cylindrical Rod
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Dayal, P.; Kuksenok, O.; Balazs, A.C. Using light to guide the self-sustained motion ofactive gels. Langmuir 2009, 25, 4298–4301. [Google Scholar] [CrossRef] [PubMed]
- Du, C.; Cheng, Q.; Li, K. Self-sustained collective motion of two joint liquid crystal elastomer spring oscillator powered by steady illumination. Micromachines 2022, 13, 271. [Google Scholar] [CrossRef]
- Yang, L.; Chang, L.; Hu, Y. An autonomous soft actuator with light-driven self-sustained wavelike oscillation for phototactic self-locomotion and power generation. Adv. Funct. Mater. 2020, 30, 1908842. [Google Scholar] [CrossRef]
- Li, K.; Chen, Z.; Wang, Z. Self-sustained eversion or inversion of a thermally responsive torus. Phys. Rev. E 2021, 103, 033004. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, A.; Racic, V. Modeling of longitudinal human walking force using self-sustained oscillator. Int. J. Struct. Stab. Dy. 2018, 18, 1850080. [Google Scholar] [CrossRef]
- Korner, K.; Kuenstler, A.S.; Hayward, R.C. A nonlinear beam model of photomotile structures. Proc. Natl. Acad. Sci. USA 2020, 117, 9762–9770. [Google Scholar] [CrossRef]
- Su, X.; Li, K.; Hu, W. Self-sustained rolling of a liquid crystal elastomer rod under inclined light illumination. Int. J. Mech. Sci. 2022, 226, 107411. [Google Scholar] [CrossRef]
- Lan, R.; Sun, J.; Shen, C. Near-infrared photodriven self-sustained oscillation of liquid-crystalline network film with predesignated polydopamine coating. Adv. Mater. 2020, 32, 1906319. [Google Scholar] [CrossRef] [PubMed]
- Du, C.; Cheng, Q.; Li, K. A Light-Powered Liquid Crystal Elastomer Spring Oscillator with Self-Shading Coatings. Polymers 2022, 14, 1525. [Google Scholar] [CrossRef]
- Rahman, M.T.; Rana, S.M.S.; Maharjan, P. Ultra-robust and broadband rotary hybridized nanogenerator for self-sustained smart-farming applications. Nano Energy 2021, 85, 105974. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, Y. A prototype for light-electric harvester based on light sensitive liquid crystal elastomer cantilever. Energy 2020, 198, 117351. [Google Scholar] [CrossRef]
- Chun, S.; Pang, C.; Cho, S.B. A Micropillar-Assisted Versatile Strategy for Highly Sensitive and Efficient Triboelectric Energy Generation under In-Plane Stimuli. Adv. Mater. 2020, 32, 1905539. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Xuan, C.; Qian, X. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot. 2019, 4, eaax7112. [Google Scholar] [CrossRef]
- Ahn, C.; Li, K.; Cai, S. Light or thermally powered autonomous rolling of an elastomer rod. ACS Appl. Mater. Interfaces 2018, 10, 25689–25696. [Google Scholar] [CrossRef] [PubMed]
- Shahsavan, H.; Salili, S.M.; Jákli, A. Smart muscle-driven self-cleaning of biomimetic microstructures from liquid crystal elastomers. Adv. Mater. 2015, 27, 6828–6833. [Google Scholar] [CrossRef]
- Mari, A.; Farace, A.; Giovannetti, V. Quantum optomechanical piston engines powered by heat. J. Phys. B-At. Mol. Opt. 2015, 48, 175501. [Google Scholar] [CrossRef] [Green Version]
- Du, C.; Zhang, B.; Cheng, Q. Thermally driven self-rotation of a hollow torus motor. Micromachines 2022, 13, 434. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, P.; Yu, Y.; Li, K. Controllable vibration of liquid crystal elastomer beams under periodic illumination. Int. J. Mech. Sci. 2020, 170, 105366. [Google Scholar] [CrossRef]
- Huang, H.; Aida, T. Towards molecular motors in unison. Nat. Nanotechnol. 2019, 14, 407. [Google Scholar] [CrossRef]
- Kulić, I.M.; Thaokar, R.; Schiessel, H. Twirling DNA rings—Swimming nanomotors ready for a kickstart. EPL-Europhys. Lett. 2005, 72, 527. [Google Scholar] [CrossRef]
- Luzinov, I.; Minko, S.; Tsukruk, V.V. Adaptive and responsive surfaces through controlled reorganization of interfacial polymer layers. Prog. Polym. Sci. 2004, 29, 635–698. [Google Scholar] [CrossRef]
- Bawa, P.; Pillay, V.; Choonara, Y.E. Stimuli-responsive polymers and their applications in drug delivery. Biomed. Mater. 2009, 4, 022001. [Google Scholar] [CrossRef] [PubMed]
- Shibayama, M. Spatial inhomogeneity and dynamic fluctuations of polymer gels. Macromol. Chem. Phys. 1998, 199, 1–30. [Google Scholar] [CrossRef]
- Hu, J.; Meng, H.; Li, G. A review of stimuli-responsive polymers for smart textile applications. Smart Mater. Struct. 2012, 21, 053001. [Google Scholar] [CrossRef]
- Kuroki, H.; Ohashi, H.; Ito, T. Isolation and analysis of a grafted polymer onto a straight cylindrical pore in a thermal-responsive gating membrane and elucidation of its permeation behavior. J. Membr. Sci. 2010, 352, 22–31. [Google Scholar] [CrossRef]
- Deng, Z.; Guo, Y.; Ma, P.X. Rapid thermal responsive conductive hybrid cryogels with shape memory properties, photothermal properties and pressure dependent conductivity. J. Colloid Interface Sci. 2018, 526, 281–294. [Google Scholar] [CrossRef] [PubMed]
- Mehta, K.; Peeketi, A.R.; Liu, L. Design and applications of light responsive liquid crystal polymer thin films. Appl. Phys. Rev. 2020, 7, 041306. [Google Scholar] [CrossRef]
- Ferrantini, C.; Pioner, J.M.; Martella, D. Development of light-responsive liquid crystalline elastomers to assist cardiac contraction. Circ. Res. 2019, 124, e44–e54. [Google Scholar] [CrossRef]
- Serak, S.; Tabiryan, N.; Vergara, R. Liquid crystalline polymer cantilever oscillators fueled by light. Soft Matter 2010, 6, 779–783. [Google Scholar] [CrossRef]
- Qiu, Y.; Park, K. Environment-sensitive hydrogels for drug delivery. Adv. Drug Deliv. Rev. 2001, 53, 321–339. [Google Scholar] [CrossRef]
- Swann, J.M.G.; Ryan, A.J. Chemical actuation in responsive hydrogels. Polym. Int. 2009, 58, 285–289. [Google Scholar] [CrossRef]
- Drozdov, A.D. Self-oscillations of hydrogels driven by chemical reactions. Int. J. Appl. Mech. 2014, 6, 1450023. [Google Scholar] [CrossRef]
- Yang, C.; Liu, Z.; Chen, C. Reduced graphene oxide-containing smart hydrogels with excellent electro-response and mechanical properties for soft actuators. ACS. Appl. Mater. Interface 2017, 9, 15758–15767. [Google Scholar] [CrossRef]
- Li, K.; Du, C.; He, Q. Thermally driven self-oscillation of an elastomer fiber with a hanging weight. Extreme Mech. Lett. 2022, 50, 101547. [Google Scholar] [CrossRef]
- He, Q.; Wang, Z.; Wang, Y. Electrospun liquid crystal elastomer microfiber actuator. Sci. Robot. 2021, 6, eabi9704. [Google Scholar] [CrossRef]
- Ge, D.; Li, K. Self-oscillating buckling and postbuckling of a liquid crystal elastomer disk under steady illumination. Int. J. Mech. Sci. 2022, 221, 107233. [Google Scholar] [CrossRef]
- Liang, X.; Chen, Z.; Zhu, L. Light-powered self-excited oscillation of a liquid crystal elastomer pendulum. Mech. Syst. Signal Process. 2022, 163, 108140. [Google Scholar] [CrossRef]
- Li, K.; Chen, Z.; Xu, P. Light-propelled self-sustained swimming of a liquid crystal elastomer torus at low Reynolds number. Int. J. Mech. Sci. 2022, 219, 107128. [Google Scholar] [CrossRef]
- Cheng, Y.C.; Lu, H.C.; Lee, X. Kirigami-based light-induced shape-morphing and locomotion. Adv. Mater. 2020, 32, 1906233. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Li, Y.; Lv, J. Phototunable self-oscillating system driven by a self-winding fiber actuator. Nat. Commun. 2021, 12, 1–9. [Google Scholar] [CrossRef]
- Zeng, H.; Lahikainen, M.; Liu, L. Light-fuelled freestyle self-oscillators. Nat. Commun. 2019, 10, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Baumann, A.; Sánchez-Ferrer, A.; Jacomine, L. Motorizing fibres with geometric zero-energy modes. Nat. Mater. 2018, 17, 523–527. [Google Scholar] [CrossRef]
- Xu, T.; Pei, D.; Yu, S. Design of MXene Composites with Biomimetic Rapid and Self-Oscillating Actuation under Ambient Circumstances. Acs. Appl. Mater. Interface 2021, 13, 31978–31985. [Google Scholar] [CrossRef]
- Gelebart, A.H.; Jan Mulder, D.; Varga, M. Making waves in a photoactive polymer film. Nature 2017, 546, 632–636. [Google Scholar] [CrossRef] [Green Version]
- Kuenstler, A.S.; Chen, Y.; Bui, P. Blueprinting Photothermal Shape-Morphing of Liquid Crystal Elastomers. Adv. Mater. 2020, 32, 2000609. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; van den Berg, J.; Crosby, A.J. Autonomous snapping and jumping polymer gels. Nat. Mater. 2021, 20, 1695–1701. [Google Scholar] [CrossRef]
- Cheng, W.; Cheng, Q.; Du, C. Beating of a Spherical Liquid Crystal Elastomer Balloon under Periodic Illumination. Micromachines 2022, 13, 769. [Google Scholar] [CrossRef] [PubMed]
- Ge, D.; Jin, J.; Dai, Y.; Xu, P.; Li, K. Self-Jumping of a Liquid Crystal Elastomer Balloon under Steady Illumination. Polymers 2022, 14, 2770. [Google Scholar] [CrossRef]
- Graeber, G.; Regulagadda, K.; Hodel, P. Leidenfrost droplet trampolining. Nat. Commun. 2021, 12, 1–7. [Google Scholar] [CrossRef]
- Xu, P.; Jin, J.; Li, K. Light-powered self-excited bouncing of a liquid crystal elastomer ball. Int. J. Mech. Sci. 2021, 208, 106686. [Google Scholar] [CrossRef]
- Bazir, A.; Baumann, A.; Ziebert, F. Dynamics of fiberboids. Soft. Matter. 2020, 16, 5210–5223. [Google Scholar] [CrossRef]
- Li, K.; Wu, P.; Cai, S. Chemomechanical oscillations in a responsive gel induced by an autocatalytic reaction. J. Appl. Phys. 2014, 116, 043523. [Google Scholar] [CrossRef]
- Parrany, A.M. Nonlinear light-induced vibration behavior of liquid crystal elastomer beam. Int. J. Mech. Sci. 2018, 136, 179–187. [Google Scholar] [CrossRef]
- Li, K.; Cai, S. Modeling of light-driven bending vibration of a liquid crystal elastomer beam. J. Appl. Mech. 2016, 83, 031009. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Su, X.; Cai, S. Self-sustained rolling of a thermally responsive rod on a hot surface. Extreme Mech. Lett. 2021, 42, 101116. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Choi, G.P.T. Mahadevan, L. Self-excited motions of volatile drops on swellable sheets. Phys. Rev. Lett. 2020, 124, 258002. [Google Scholar] [CrossRef] [PubMed]
- Boissonade, J.; De Kepper, P. Multiple types of spatio-temporal oscillations induced by differential diffusion in the Landolt reaction. Phys. Chem. Chem. Phys. 2011, 13, 4132–4137. [Google Scholar] [CrossRef] [PubMed]
- Martella, D.; Nocentini, S.; Parmeggiani, C.; Wiersma, D.S. Self-Regulating Capabilities in Photonic Robotics. Adv. Mater. Technol-US 2019, 4, 1800571. [Google Scholar] [CrossRef]
- Chatterjee, S. Self-excited oscillation under nonlinear feedback with time-delay. J. Sound Vib. 2011, 330, 1860–1876. [Google Scholar] [CrossRef]
- Nocentini, S.; Parmeggiani, C.; Martella, D. Optically driven soft micro robotics. Adv. Opt. Mater. 2018, 6, 1800207. [Google Scholar] [CrossRef]
- Sangwan, V.; Taneja, A.; Mukherjee, S. Design of a robust self-excited biped walking mechanism. Mech. Mach. Theory 2004, 39, 1385–1397. [Google Scholar] [CrossRef]
- Qadri, M.N.M.; Zhao, F.; Tang, H. Fluid-structure interaction of a fully passive flapping foil for flow energy extraction. Int. J. Mech. Sci. 2020, 177, 105587. [Google Scholar] [CrossRef]
- Ozisik, M.N. Heat Conduction; John Wiley & Sons: New York, NY, USA, 1980. [Google Scholar]
- Yiannopoulos, A.C.; Anifantis, N.K.; Dimarogonas, A.D. Thermal stress optimization in metal rolling. Therm. Stresses 1997, 20, 569–590. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Te | External environment temperature | ||
| Internal radius | |||
| External radius | |||
| Heat transfer coefficient | |||
| Thermal diffusion coefficient | |||
| k | Heat conduction coefficient | ||
| q | Heat flux | ||
| ω | Rolling angular velocity | ||
| Rod length | |||
| Thermal expansion coefficient | |||
| Elastic modulus of the material | |||
| Mass density | |||
| Gravitational acceleration | |||
| Sliding friction coefficient |
| Parameter | Definition | Expression | Value |
|---|---|---|---|
| Dimensionless heat flux | |||
| Dimensionless heat transfer coefficient | |||
| λ | Radius ratio | ||
| Dimensionless rolling angular velocity | |||
| Dimensionless thermal expansion coefficient | |||
| Dimensionless parameter |
| Dimensionless Heat Flux | Optimal Radius Ratio λ | Energy Efficiency of Solid Rod | Maximum Energy Efficiency | Energy Efficiency Improvement |
|---|---|---|---|---|
| 35 | 0.31 | 16.4% | 17.51% | 1.11% |
| 30 | 0.49 | 0%(static) | 16.95% | 16.95% |
| 20 | 0.73 | 0%(static) | 16.67% | 16.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, F.; Du, C.; Dai, Y.; Li, K. Thermally Driven Continuous Rolling of a Thick-Walled Cylindrical Rod. Micromachines 2022, 13, 2035. https://doi.org/10.3390/mi13112035
Zhu F, Du C, Dai Y, Li K. Thermally Driven Continuous Rolling of a Thick-Walled Cylindrical Rod. Micromachines. 2022; 13(11):2035. https://doi.org/10.3390/mi13112035
Chicago/Turabian StyleZhu, Fayang, Changshen Du, Yuntong Dai, and Kai Li. 2022. "Thermally Driven Continuous Rolling of a Thick-Walled Cylindrical Rod" Micromachines 13, no. 11: 2035. https://doi.org/10.3390/mi13112035