

Research of Frequency Splitting Caused by Uneven Mass of Micro-Hemispherical Resonator Gyro

Abstract
:1. Introduction
2. The Frequency Splitting Caused by Uneven Mass
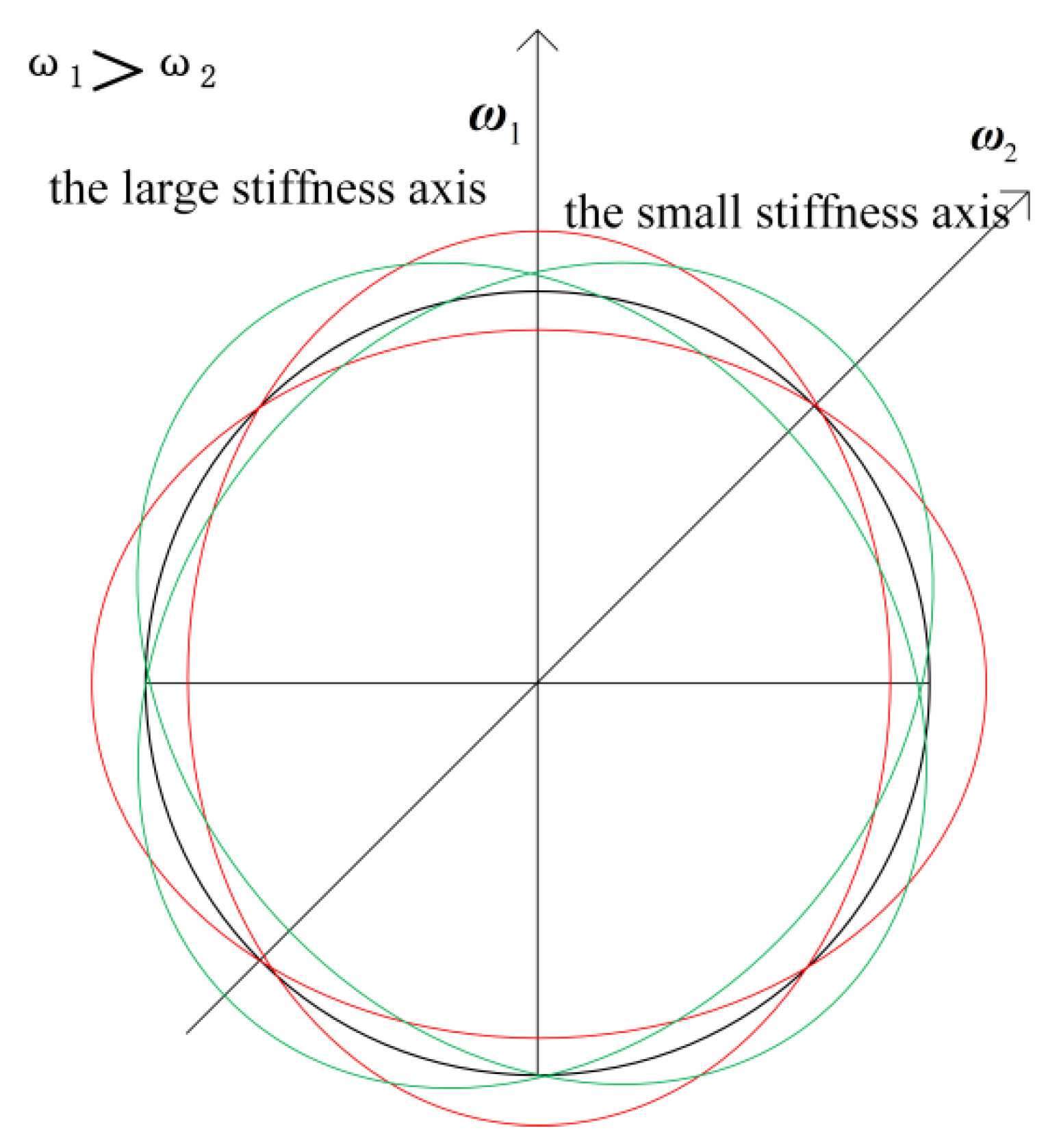
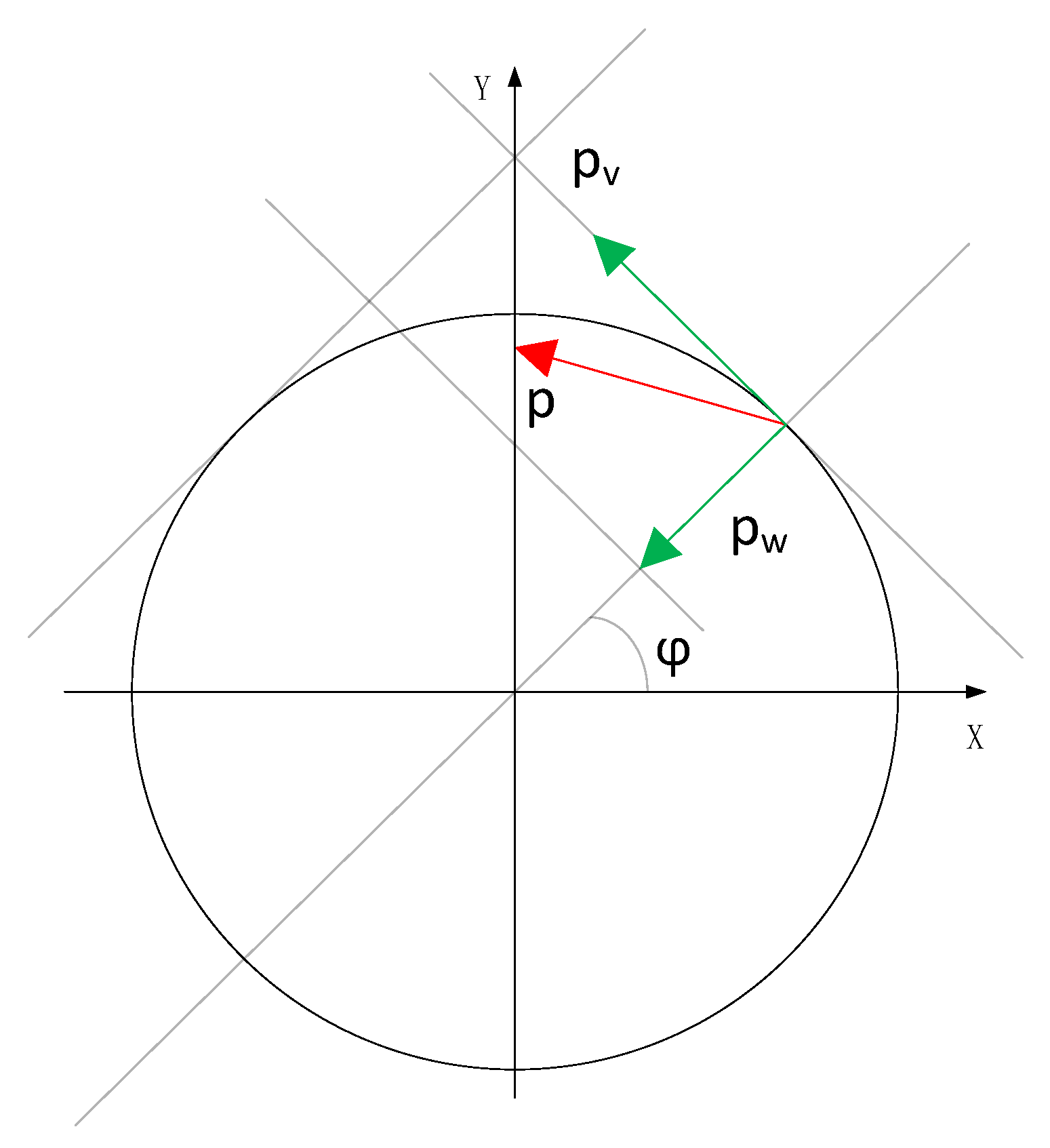
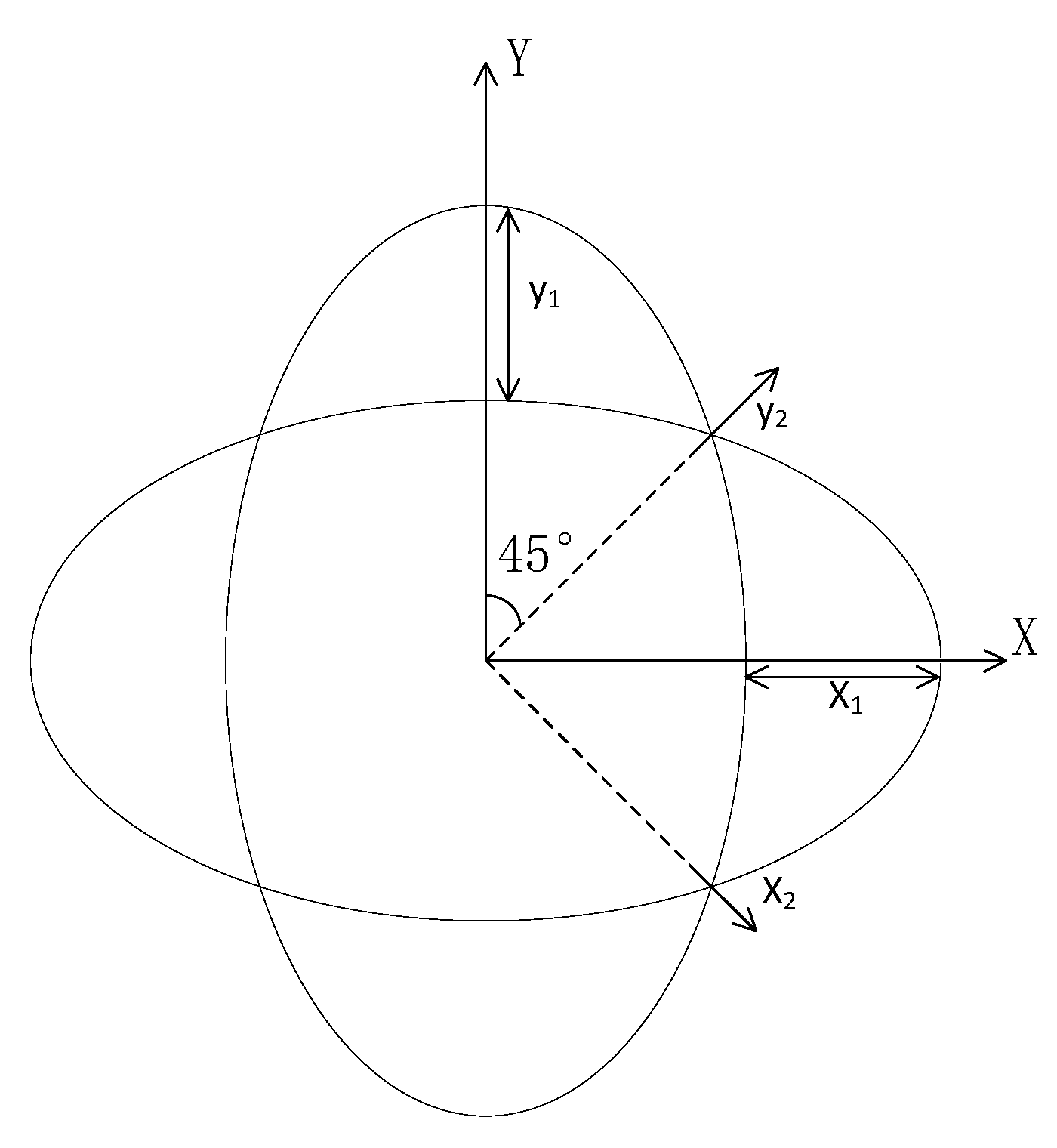
2.1. The Theory of Frequency Splitting
2.2. The Partial Differential Equation of Hemispherical Resonator with Ring Structure
2.3. Frequency Splitting Caused by Uneven Density
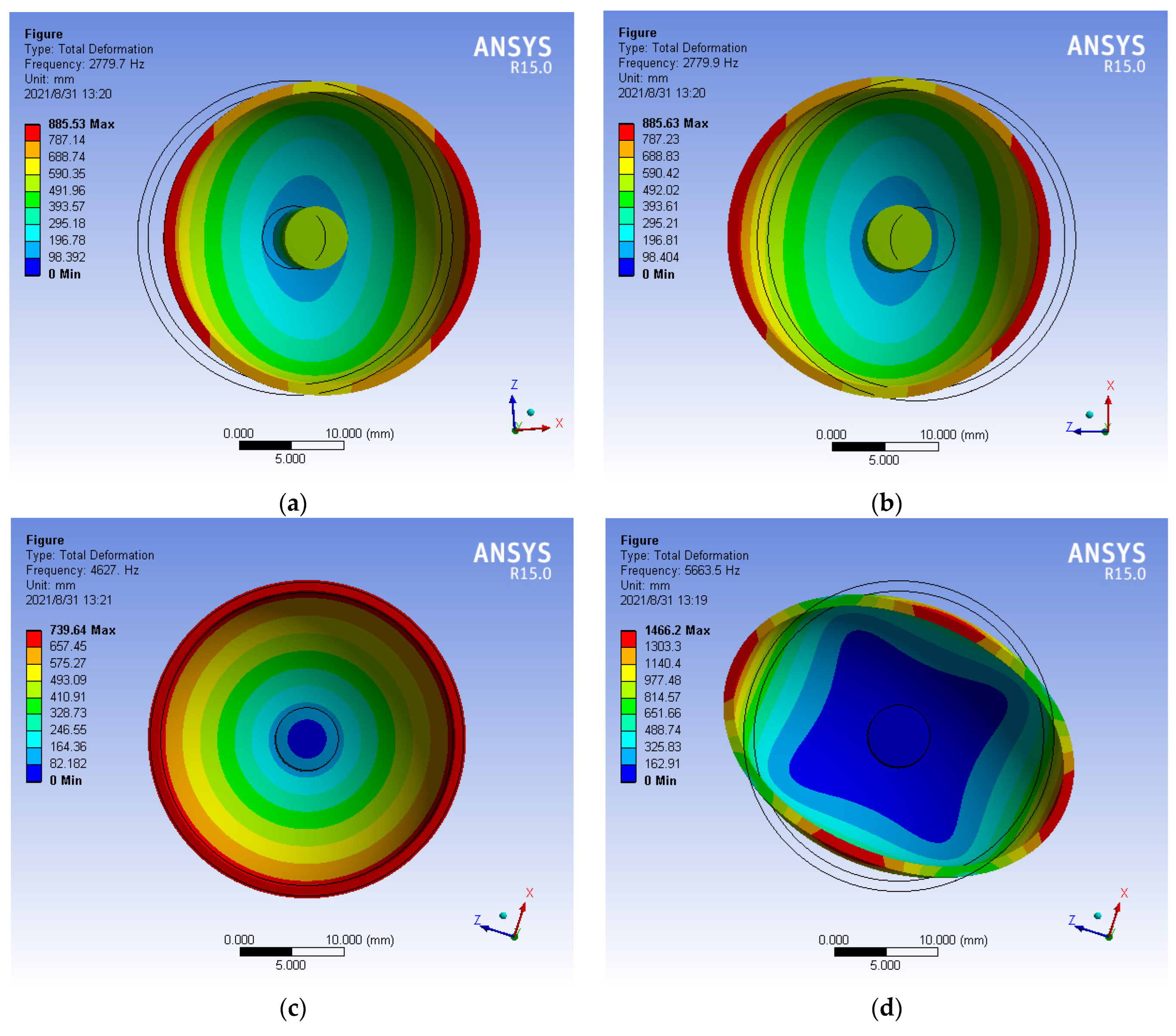
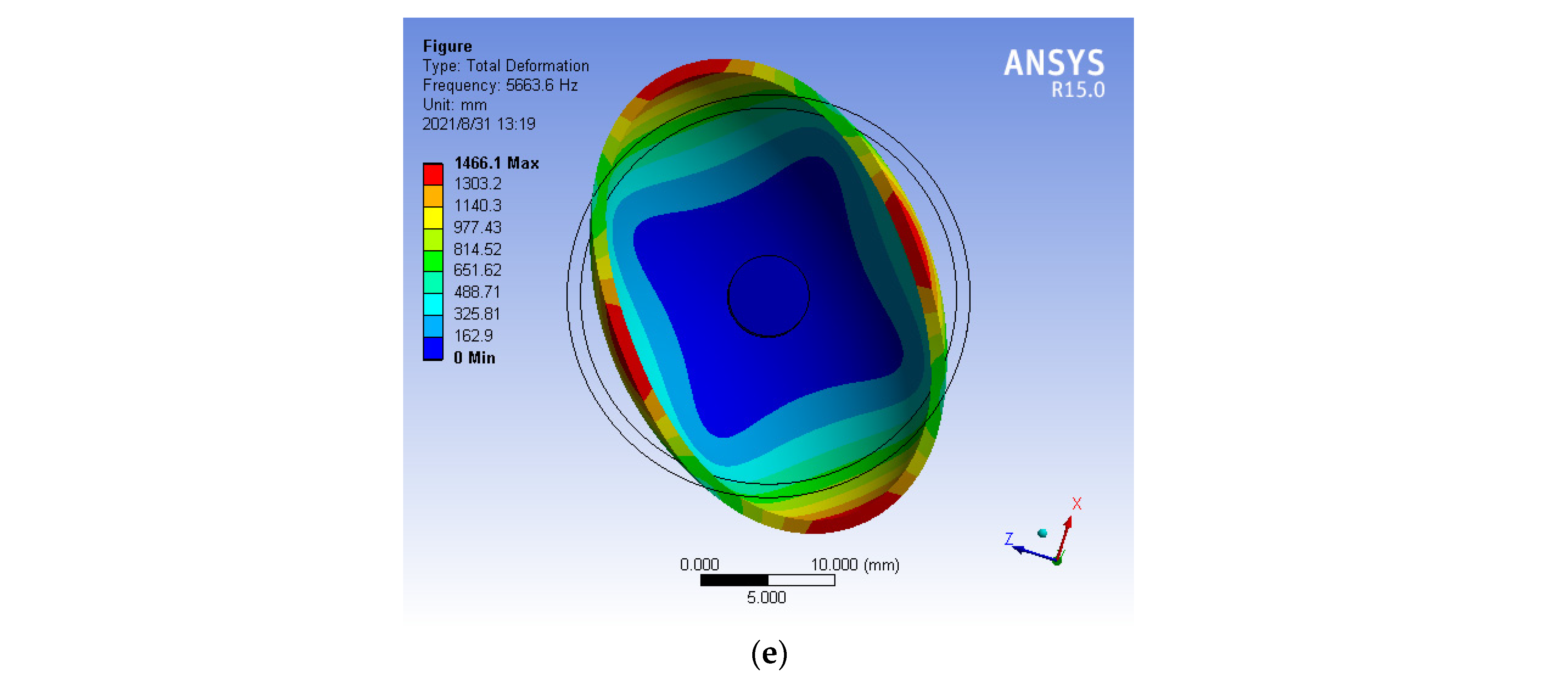
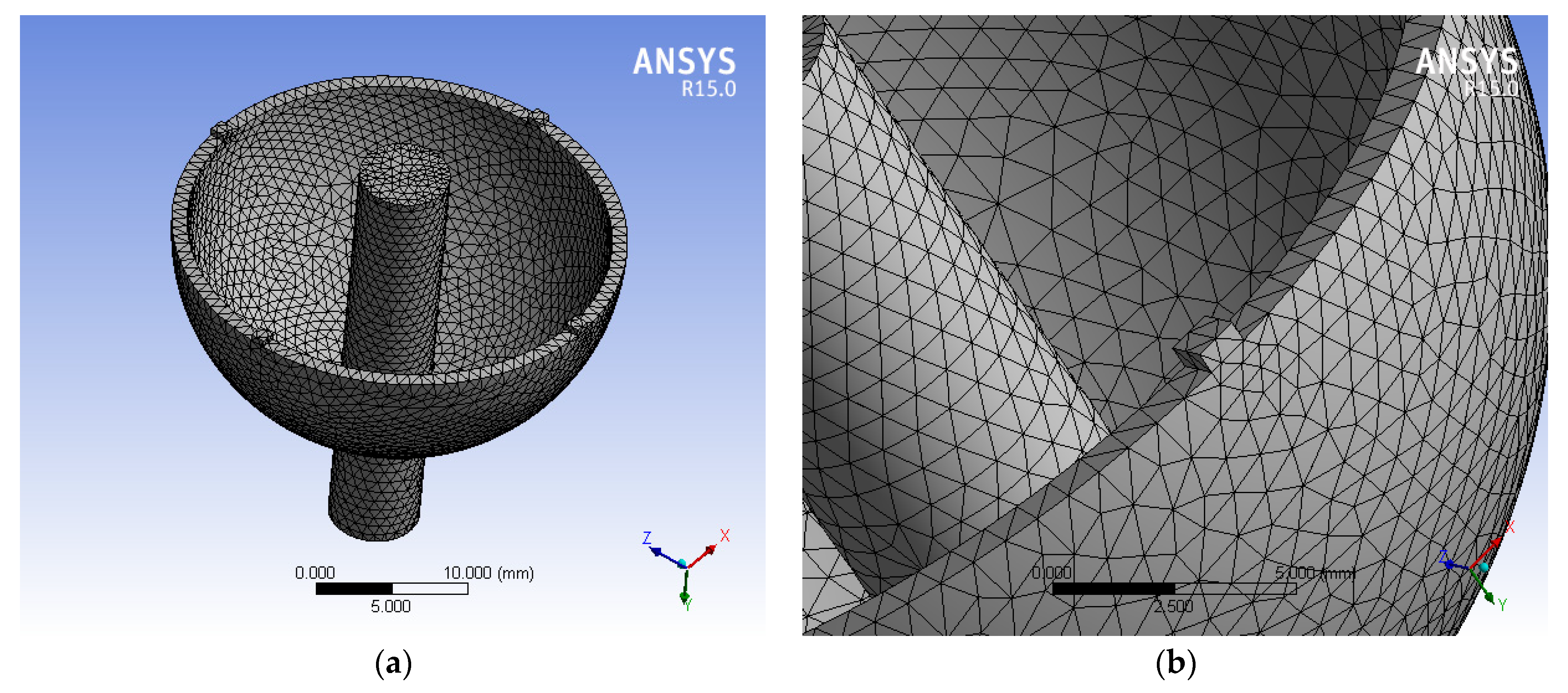
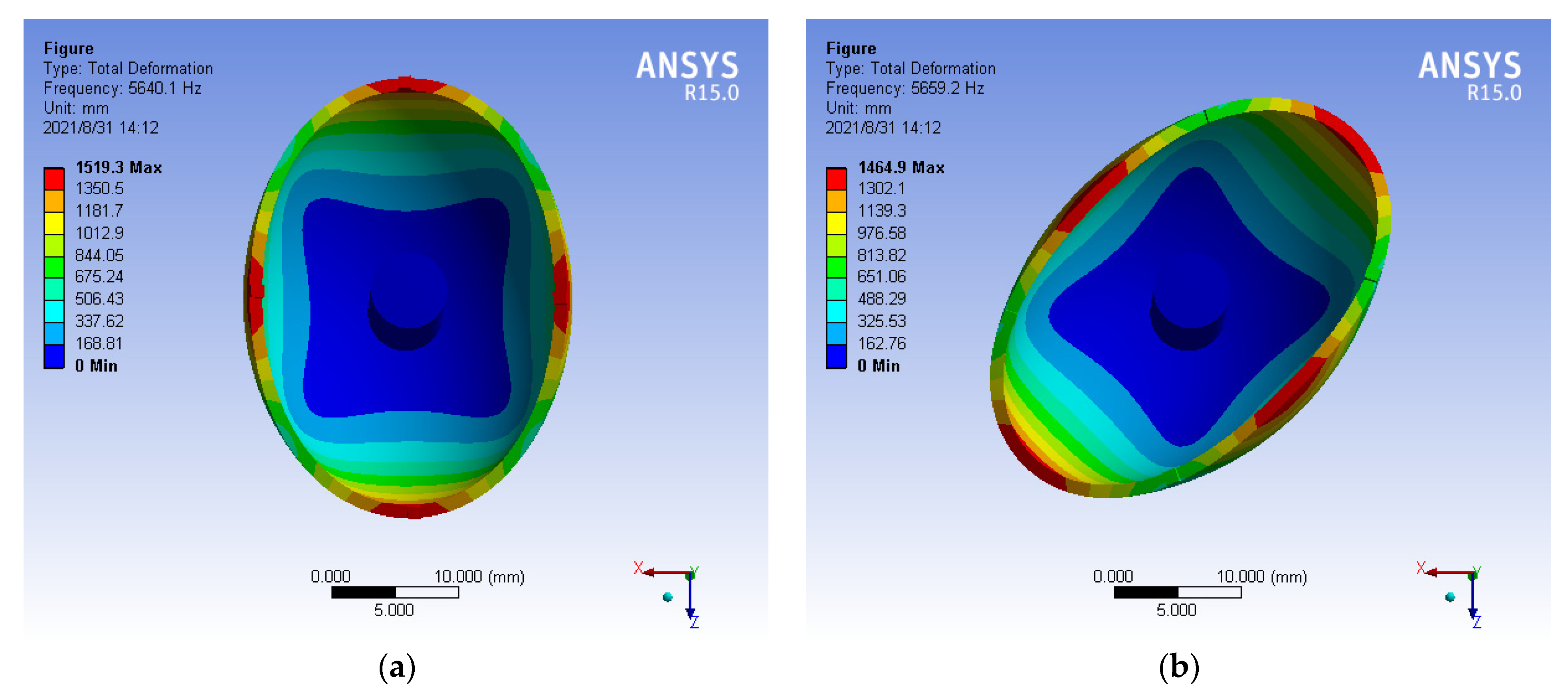
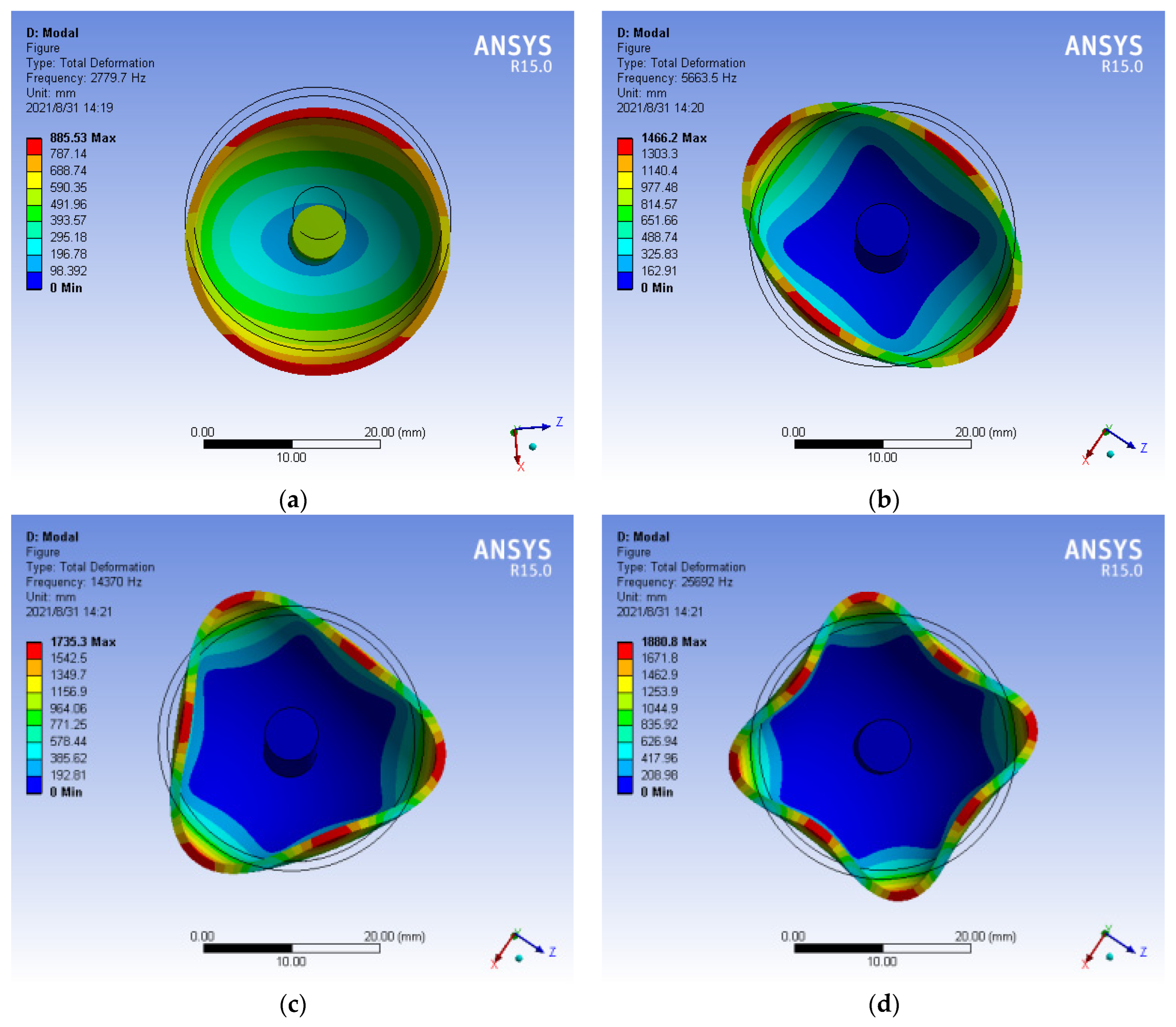
2.4. The Modal Analysis of Hemispherical Resonator with Uneven Mass
2.4.1. The Mode of Perfect Hemispherical Resonator
2.4.2. The Mode of Hemispherical Resonator with the Uneven Mass
3. The Identification of Harmonic Component with the Uneven Mass
3.1. The Identification of 4th Harmonic of Mass
3.2. The Adjustment of Frequency by the Mass Division
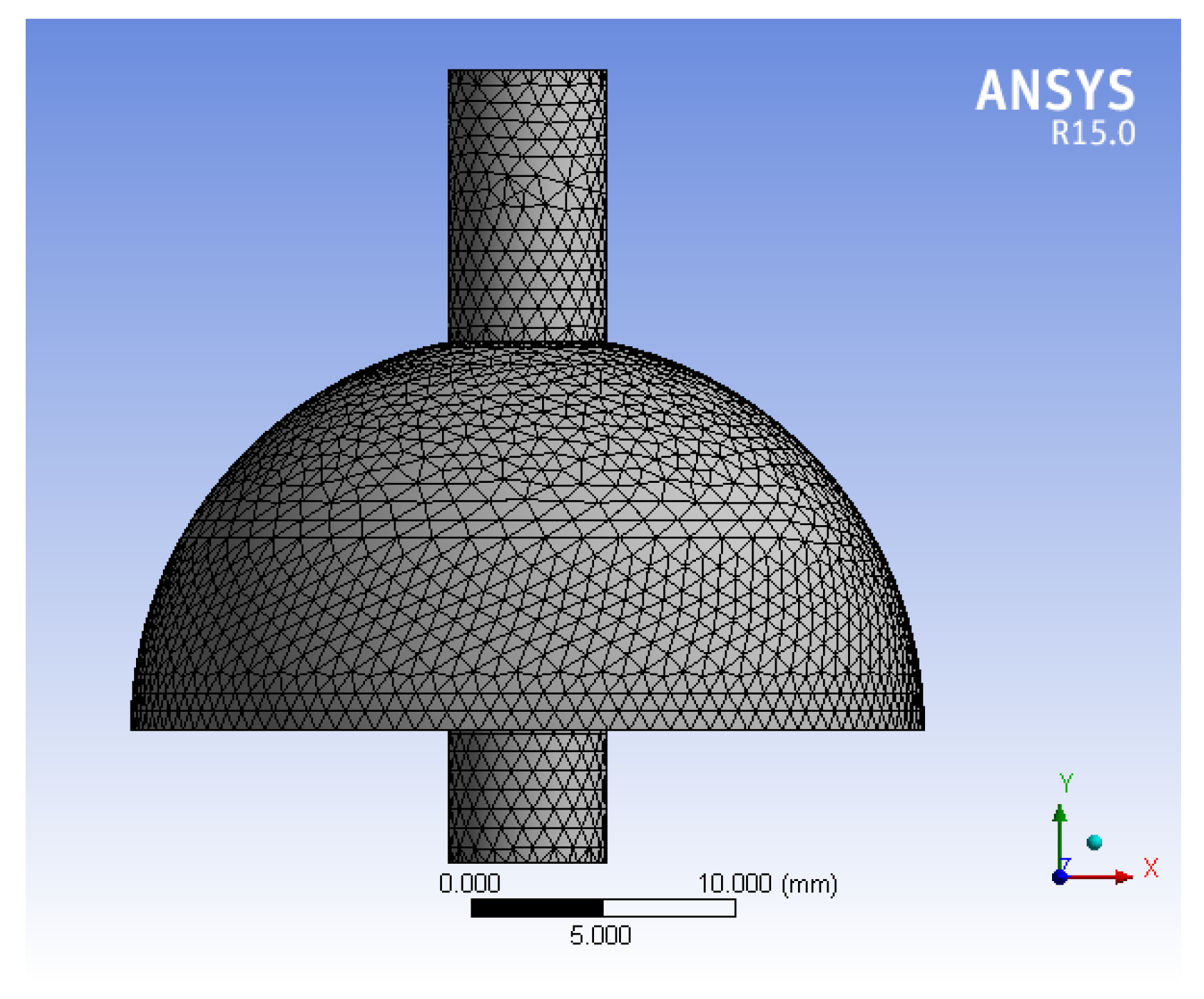
3.3. The Simulation of Mass Balance by ANASY
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Matthew, W.; Kaikai, L. 422 Million intrinsic quality factor planar integrated all-waveguide resonator with sub-MHz linewidth. Nat. Commun. 2021, 12, 1–8. [Google Scholar]
- Spencer, D.T.; Bauters, J.F.; Heck, M.J.R. Integrated waveguide coupled Si3N4 resonators in the ultrahigh-Q regime. Optica 2014, 1, 153–157. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.Q.; Zhao, H.B. Analysis of frequency cracking caused by density Deviation of harmonic oscillator. J. Harbin Inst. Technol. 2012, 44, 13–16. [Google Scholar]
- Chen, X.; Ren, S.Q.; Zhao, H.B.; Qi, J.Y. Influence of Thin Wall Thickness Inhomogeneity of hemispherical Resonator on gyro Precision. Space Control. Technol. Appl. 2009, 35, 29–33. [Google Scholar]
- Shatalov, M.Y.; Joubert, S.V.; Coetzee, C.E. The influence of mass imperfections on the evolution of standing waves in slowly rotating spherical bodies. J. Sound Vib. 2011, 330, 127–135. [Google Scholar] [CrossRef]
- Li, S.L.; Yang, H.; Xia, Y.; Bao, X.G.; Duan, J.; Zhao, W.L. Measurement method of Frequency Cracking and Natural Stiffness axis Azimuth of Hemispherical Resonator Based on Amplitude-frequency Response Characteristics. Flight Control Detect. 2020, 3, 69–74. [Google Scholar]
- Li, W.; Jin, X.; Ren, S.Q. Measurement method of Frequency Cracking and Inherent Rigid Axis of Hemispherical Resonant Gyroscope. J. Sens. Technol. 2016, 29, 338–342. [Google Scholar]
- Apostolyuk, V. Coriolis Vibratory Gyroscopes; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Yang, Y. Structure and Error Analysis of Hemispherical Resonant Gyroscope. Ph.D. Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2014. [Google Scholar]
- Xu, Z.Y.; Yi, G.X.; Wei, Z.N.; Zhao, W.L. A Dynamic Modeling Method for Harmonic oscillator of hemispherical resonant gyroscope. Acta Aeronaut. Astronaut. Sin. 2018, 39, 139–149. [Google Scholar]
- Zhong, X.F. Analysis and compensation of mass imperfection effects on 3-D sensitive structure of bell-shaped vibratory gyro. Sens. Actuators A Phys. 2015, 224, 14–23. [Google Scholar]
- Quan, X.W.; He, B.B.; Wang, Y.; Tang, Z.; Li, X. An Extended Fourier Approach to Improve the Retrieved Leaf Area Index (LAI) in a Time Series from an Alpine Wetland. Remote Sens. 2014, 6, 1171–1190. [Google Scholar] [CrossRef] [Green Version]
- Shang, H.; Jia, L.; Massimo, M. Modeling and Reconstruction of Time Series of Passive Microwave Data by Discrete Fourier Transform Guided Filtering and Harmonic Analysis. Remote Sens. 2016, 8, 970. [Google Scholar] [CrossRef] [Green Version]
- Ji, W.K. Vibration Characteristic Analysis of Hemispherical Harmonic Oscillator and Research on Influencing Factors of Quality Factor. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2021. [Google Scholar]
- Zhao, H.B.; Ren, S.Q.; Li, W. Establishment of Dynamic Equation of Hemispherical Harmonic Oscillator and Calculation of Natural Frequency. J. Harbin Inst. Technol. 2010, 42, 1702–1706. [Google Scholar]
- Song, L.J.; Ni, J.Y.; Zhou, L.; Zhao, W.L.; Li, S.L.; Lu, M.H. The Analysis and Simulation with the Fatigue Life of Hemispherical Resonator Gyro. J. Sens. 2021, 2021, 5564932. [Google Scholar] [CrossRef]
- Wei, Z.N.; Yi, G.X.; Huo, Y.; Xi, B.Q.; Zhao, Y. High-precision synchronous test method of vibration performance parameters for fused quartz hemispherical resonator. Measurement 2021, 185, 109924. [Google Scholar] [CrossRef]
- Siliang, C.; Shaohua, W.; Chen, L.; Qingwu, H.; Hongjun, Y. A Seismic Capacity Evaluation Approach for Architectural Heritage Using Finite Element Analysis of Three-Dimensional Model: A Case Study of the Limestone Hall in the Ming Dynasty. Remote Sens. 2018, 10, 963. [Google Scholar]
- Sharma, G.N.; Sundararajan, T.; Gautam, S.S. Thermoelastic Damping Based Design, Sensitivity Study and Demonstration of a Functional Hybrid Gyroscope Resonator for High Quality Factor. Gyroscopy Navig. 2021, 12, 69–85. [Google Scholar] [CrossRef]
- Ren, S.Q.; Zhao, H.B. Influence of Uneven Density Distribution of Hemispheric Harmonic Oscillator on Output Precision. Chin. Inert. Technol. 2011, 19, 364–368. [Google Scholar]
- Ming, K. Study on Frequency Cracking Mechanism and Balance Method of Hemispherical Resonant Gyro. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2019. [Google Scholar]
- Song, L.J.; Yang, R.; Zhao, W.L.; He, X.; Li, S.; Ding, Y.J. Research on the Precession Characteristics of Hemispherical Resonator Gyro. Complexity 2021, 2021, 8825017. [Google Scholar] [CrossRef]
- Xu, Z.; Zhu, W.; Yi, G.; Fan, W. Dynamic modeling and output error analysis of an imperfect hemispherical shell resonator. J. Sound Vib. 2021, 498, 115964. [Google Scholar] [CrossRef]
- Zhou, C.; Peng, K.; Fang, H.B.; Tan, P.H.; Fang, Z.Q. Frequency Divergence Correction of defective hemispherical resonators. Piezoelectr. Acoustoptic 2021, 43, 413–416+420. [Google Scholar]
- Huo, Y.; Ren, S.Q.; Yi, G.X.; Wang, C.H. Motion equations of hemispherical resonator and analysis of frequency split caused by slight mass non-uniformity. Chin. J. Aeronaut. 2020, 33, 10. [Google Scholar] [CrossRef]
- Hu, X.D.; Luo, K.J.; Yu, B.; Zhou, Q.; Lin, K.; Lei, K.; Tao, L. Mass leveling of hemispherical Vibrators using ion Beam technology. In Proceedings of the Fifth Annual Academic Conference of China Inertial Technology Society, Guilin, China, October 2003. [Google Scholar]
- Basarab, M.A.; Lunin, B.S.; Matveev, V.A.; Chumankin, Y.A. Balancing of hemispherical resonator gyros by chemical etching. Gyroscopy Navig. 2015, 6, 218–223. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, Y.; Qu, T.; Jia, Y.; Yang, K.; Luo, H. Decreasing Frequency Splits of Hemispherical Resonators by Chemical Etching. Sensors 2018, 18, 3772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tao, Y.; Pan, Y.; Jia, Y.; Liu, J.; Luo, H. Frequency tuning of fused silica cylindrical resonators by chemical etching. In Proceedings of the 2019 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 10–11 September 2019. [Google Scholar]
- Li, W. Error Mechanism Analysis and Test of Hemispherical Resonant Gyroscope. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2013. [Google Scholar]
- Yang, Y.; Hu, X.D.; Tan, W.Y.; Zheng, D.; Ran, Y.; Yu, B. Technology based on optimization of the performance of hemispherical gyroscopic resonators. Piezoelectrics Acoustoptic 2014, 36, 221–224. [Google Scholar]
- Riabinin, M.; Sharapova, P.R.; Bartley, T.; Meier, T. Generating two-mode squeezing with multimode measurement-induced nonlinearity. J. Phys. Commun. 2021, 5, 045002. [Google Scholar] [CrossRef]
- Yu, D.C.; Qi, G.H.; Wei, Y.Y. Research on Frequency Modification Technology of Metal Cylindrical Resonant gyroscope. Navig. Position. Timing 2019, 6, 100–107. [Google Scholar]
- Li, L.; He, J.; Yang, L.L.; Han, Z.; Li, X. Spectral-and Energy-Efficiency of Multi-Pair Two-Way Massive MIMO Relay Systems Experiencing Channel Aging. IEEE Access 2019, 7, 99. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Diameter of Harmonic Oscillator (mm) | Shell Thickness (mm) | Young’s Modulus (MPa) | Density (kg/m3) | Poisson’s Ratio |
|---|---|---|---|---|---|
| Parameter value | 30 | 1 | 766,700 | 2200 | 0.17 |
| Steps | The Removal Height of Mass (mm) | The Natural Frequency of Mode 4 (Hz) | The Natural Frequency of Mode 5 (Hz) | |
|---|---|---|---|---|
| 0 | 0 | 5640.104155855 | 5659.245586609 | 19.141430754 |
| 1 | 0.05 | 5642.839856892 | 5659.742846148 | 16.902989256 |
| 2 | 0.10 | 5645.646469793 | 5660.507782266 | 14.861312473 |
| 3 | 0.15 | 5647.897040007 | 5660.966849323 | 13.069809316 |
| 4 | 0.20 | 5650.947992024 | 5661.454239987 | 10.506247963 |
| 5 | 0.25 | 5652.929648874 | 5661.166872808 | 8.237223934 |
| 6 | 0.30 | 5655.672389432 | 5661.661513544 | 5.989124112 |
| 7 | 0.35 | 5658.416513497 | 5662.039588951 | 3.623075454 |
| 8 | 0.40 | 5659.866145712 | 5661.307069927 | 1.440924215 |
| 9 | 0.45 | 5661.663708925 | 5662.006946328 | 0.343237403 |
| 10 | 0.50 | 5663.466956867 | 5663.568805673 | 0.101848806 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, L.; Li, Q.; Zhao, W.; Zhang, T.; He, X. Research of Frequency Splitting Caused by Uneven Mass of Micro-Hemispherical Resonator Gyro. Micromachines 2022, 13, 2015. https://doi.org/10.3390/mi13112015
Song L, Li Q, Zhao W, Zhang T, He X. Research of Frequency Splitting Caused by Uneven Mass of Micro-Hemispherical Resonator Gyro. Micromachines. 2022; 13(11):2015. https://doi.org/10.3390/mi13112015
Chicago/Turabian StyleSong, Lijun, Qingru Li, Wanliang Zhao, Tianxiang Zhang, and Xing He. 2022. "Research of Frequency Splitting Caused by Uneven Mass of Micro-Hemispherical Resonator Gyro" Micromachines 13, no. 11: 2015. https://doi.org/10.3390/mi13112015